零件图(大齿轮)
项目六 典型零件图的识读(二)

A
3.2
53
A-A 16.5
3.2
B 0.05 B
标题
技术要求
1.调质220~250HB。 2.未注倒角均为C2。
制图
3.去锐边毛刺。
校核
4.线性尺寸未注公差为GB/T1804-m。 审核
更改
技术要求
班级
(日期)
(日期)
45
(日期) 比例 1:1
(日期) 成绩
(学号) 共 张 第 张
(校名) 齿轮轴
h 1.4h
30°
斜度的符号
30°
锥度的符号
(1) 斜度和锥度的标注,其符号应与斜度和锥度的方向一致。 (2) 符号的线宽为h/10。
二、机械加工工艺对零件结构的要求
⒈ 倒角
作用:便于装配和操作安全。 通常在轴及孔端部倒角。
b×
b
倒角宽度b按轴(孔)径查标准确定。 =45°,也可取30°或60°。
45
4
A
φ20r6( )
6N9( )
φ30
φ40
2×0.5 8
2×0.5
A
3.2
53
60
76
28
200
228
A-A 16.5
3.2
B 0.05 B
技术要求
1.调质220~250HB。 2.未注倒角均为C2。 3.去锐边毛刺。
制图 校核
4.线性尺寸未注公差为GB/T1804-m。 审核
更改
班级
(日期)
铸件表面相交处应有圆角,以免铸件冷却 时产生缩孔或裂纹,同时防止脱模时砂型落砂。
缩孔 裂纹
过渡线 (P230):
由于铸造圆角的存在,使得铸件表面的 相贯线变得不明显,为了区分不同表面,以 过渡线的形式画出。
减速器装配图、大齿轮零件图和输出轴零件图解读
第1章初始参数及其设计要求保证机构件强度前提下,注意外形美观,各部分比例协调。
初始参数:功率P=2.8kW,总传动比i=5第2章电动机2.1 电动机的选择根据粉碎机的工作条件及生产要求,在电动机能够满足使用要求的前提下,尽可能选用价格较低的电动机,以降低制造成本。
由于额定功率相同的电动机,如果转速越低,则尺寸越大,价格越贵。
粉碎机所需要的功率为kw=,故P8.2选用Y系列(Y100L2-4)型三相笼型异步电动机。
Y系列三相笼型异步电动机是按照国际电工委员会(IEO)标准设计的,具有国际互换性的特点。
其中Y系列(Y100L2-4)电动机为全封闭的自扇冷式笼型三相异步电动机,具有防灰尘、铁屑或其它杂务物侵入电动机内部之特点,B 级绝缘,工作环境不超过+40℃,相对温度不超过95%,海拔高度不超过1000m,额定电压为380V,频率50HZ,适用于无特殊要求的机械上,如农业机械。
Y系列三相笼型异步电动具有效率高、启动转矩大、且提高了防护等级为IP54、提高了绝缘等级、噪音低、结构合理产品先进、应用很广泛。
其主要技术参数如下:型号:4YL2100-同步转速:min1500r/额定功率:kw=P3满载转速:min1420r/堵转转矩/额定转矩:)⋅TN/(2.2mn最大转矩/额定转矩:)/(T⋅N2.2mn质量:kg3.4极数:4极机座中心高:mm100该电动机采用立式安装,机座不带底脚,端盖与凸缘,轴伸向下。
2.2电机机座的选择第3章 传动比及其相关参数计算3.1 传动比及其相关参数的分配根据设计要求,电动机型号为Y100L2-4,功率P=3kw ,转速n=1420r/min 。
输出端转速为n=300r/min 。
总传动比: 73.430014401===n n i ; (3-1)分配传动比:取3=D i ; 齿轮减速器:58.1373.4===D L i i i ; (3-2) 高速传动比:5.158.14.14.112=⨯==L i i ; (3-3)低速传动比:05.15.158.11223===i i i L 。
齿轮轴零件图(齿轮)CAD步骤

命令:命令:** 拉伸**指定拉伸点或[基点(B)/复制(C)/放弃(U)/退出(X)]:命令:** 拉伸**指定拉伸点或[基点(B)/复制(C)/放弃(U)/退出(X)]:命令:命令:** 拉伸**指定拉伸点或[基点(B)/复制(C)/放弃(U)/退出(X)]:命令:** 拉伸**指定拉伸点或[基点(B)/复制(C)/放弃(U)/退出(X)]:** MOVE **指定移动点或[基点(B)/复制(C)/放弃(U)/退出(X)]: _u 命令已完全放弃。
** MOVE **指定移动点或[基点(B)/复制(C)/放弃(U)/退出(X)]:命令:命令:命令: _erase 找到 2 个命令:命令:命令:命令: _erase 找到 1 个命令:命令:命令: _line指定第一个点: *取消*命令:命令: _line指定第一个点:指定下一点或[放弃(U)]: 138.75指定下一点或[放弃(U)]: 40指定下一点或[闭合(C)/放弃(U)]:命令:命令:命令:命令: _erase 找到 1 个命令:命令:命令:命令: _erase 找到 1 个命令:命令:命令:命令: _erase 找到 1 个命令:命令:** 拉伸**指定拉伸点或[基点(B)/复制(C)/放弃(U)/退出(X)]:命令:** 拉伸**指定拉伸点或[基点(B)/复制(C)/放弃(U)/退出(X)]:命令: 指定对角点或[栏选(F)/圈围(WP)/圈交(CP)]:命令:命令:命令:自动保存到G:\Users\mm\appdata\local\temp\低速大齿轮A3_1_1_8333.sv$ ...命令:命令:命令:命令:命令: _line指定第一个点:指定下一点或[放弃(U)]: 34.875指定下一点或[放弃(U)]:指定下一点或[闭合(C)/放弃(U)]:命令:命令:命令:命令:命令:命令:命令:命令: _line指定第一个点:指定下一点或[放弃(U)]: 32指定下一点或[放弃(U)]: 17.4375指定下一点或[闭合(C)/放弃(U)]:指定下一点或[闭合(C)/放弃(U)]:指定下一点或[闭合(C)/放弃(U)]: 17.4375指定下一点或[闭合(C)/放弃(U)]: 已在(6871.4504, 2035.1208, 0.0000) 创建零长度直线指定下一点或[闭合(C)/放弃(U)]: 17.4375指定下一点或[闭合(C)/放弃(U)]:指定下一点或[闭合(C)/放弃(U)]: *取消*命令:命令:命令:命令: _erase 找到 1 个命令:命令:命令: _line指定第一个点:指定下一点或[放弃(U)]: 8指定下一点或[放弃(U)]:指定下一点或[闭合(C)/放弃(U)]: 17.4375指定下一点或[闭合(C)/放弃(U)]: 已在(6906.3254, 2035.1208, 0.0000) 创建零长度直线指定下一点或[闭合(C)/放弃(U)]:指定下一点或[闭合(C)/放弃(U)]:命令:命令:命令: _line指定第一个点:指定下一点或[放弃(U)]:指定下一点或[放弃(U)]: *取消*命令:命令:命令:命令: _erase 找到 1 个命令:命令:命令:命令: _erase 找到 1 个命令:命令:命令: _line指定第一个点:指定下一点或[放弃(U)]: *取消*命令:命令:命令:命令: _erase 找到 1 个命令:命令:** 拉伸**指定拉伸点或[基点(B)/复制(C)/放弃(U)/退出(X)]:命令:** 拉伸**指定拉伸点或[基点(B)/复制(C)/放弃(U)/退出(X)]:命令:ERASE找到1 个命令:命令:命令: _.undo 当前设置: 自动= 开,控制= 全部,合并= 是,图层= 是输入要放弃的操作数目或[自动(A)/控制(C)/开始(BE)/结束(E)/标记(M)/后退(B)] <1>: 1 ERASE 命令:命令:命令: _line指定第一个点:指定下一点或[放弃(U)]:指定下一点或[放弃(U)]:命令:命令:命令: _line指定第一个点:指定下一点或[放弃(U)]: 37.5指定下一点或[放弃(U)]:指定下一点或[闭合(C)/放弃(U)]:自动保存到G:\Users\mm\appdata\local\temp\低速大齿轮A3_1_1_8333.sv$ ...命令:命令:命令:命令:命令:命令:命令:命令: _erase 找到 4 个命令:命令:命令: _mirror选择对象: 找到1 个选择对象: 找到1 个,总计 2 个选择对象: 找到1 个,总计 3 个选择对象: 找到1 个,总计 4 个选择对象: 找到1 个,总计 6 个选择对象: 找到1 个,总计7 个选择对象: 找到1 个,总计8 个选择对象: 找到1 个,总计9 个选择对象: 找到1 个,总计10 个选择对象: 找到1 个,总计11 个选择对象: 找到1 个,总计12 个选择对象:指定镜像线的第一点: 指定镜像线的第二点: 要删除源对象吗?[是(Y)/否(N)] <N>:命令:命令:命令: _mirror选择对象: 找到1 个选择对象: 找到1 个,总计 2 个选择对象: 找到1 个,总计 3 个选择对象: 找到1 个,总计 4 个选择对象: 找到1 个,总计 5 个选择对象: 指定对角点: 找到0 个选择对象: 找到1 个,总计 6 个选择对象: 找到1 个,总计7 个选择对象: 找到1 个,总计8 个选择对象: 找到1 个,总计9 个选择对象: 找到1 个,总计10 个选择对象: 找到1 个,总计12 个选择对象: 找到1 个,总计13 个选择对象: 找到1 个,总计14 个选择对象: 找到1 个,总计15 个选择对象: 找到1 个,总计16 个选择对象: 指定对角点: 找到0 个选择对象: 找到1 个,总计17 个选择对象: 找到1 个,总计18 个选择对象: 找到1 个,总计19 个选择对象: 找到1 个,总计20 个选择对象: 指定对角点: 找到0 个选择对象: 找到1 个,总计21 个选择对象: 找到1 个,总计22 个选择对象: 找到1 个,总计23 个选择对象: 找到1 个,总计24 个选择对象: 找到1 个,总计25 个选择对象:指定镜像线的第一点: 指定镜像线的第二点: 要删除源对象吗?[是(Y)/否(N)] <N>:命令:命令:命令:命令:命令:命令:命令:命令: _move 找到 5 个指定基点或[位移(D)] <位移>:指定第二个点或<使用第一个点作为位移>:命令: 指定对角点或[栏选(F)/圈围(WP)/圈交(CP)]:命令:命令:命令: _move 找到 5 个指定基点或[位移(D)] <位移>:指定第二个点或<使用第一个点作为位移>:命令: 指定对角点或[栏选(F)/圈围(WP)/圈交(CP)]:命令:命令:命令:命令:命令:命令:命令:命令:命令:命令: _move 找到59 个指定基点或[位移(D)] <位移>:指定第二个点或<使用第一个点作为位移>:命令:命令:命令: _.undo 当前设置: 自动= 开,控制= 全部,合并= 是,图层= 是输入要放弃的操作数目或[自动(A)/控制(C)/开始(BE)/结束(E)/标记(M)/后退(B)] <1>: 1 移动GROUP命令: 指定对角点或[栏选(F)/圈围(WP)/圈交(CP)]:命令:命令:命令: _move 找到58 个指定基点或[位移(D)] <位移>: *取消*命令:命令:命令: _move选择对象: 指定对角点: 找到61 个选择对象: 找到1 个,总计62 个选择对象:指定基点或[位移(D)] <位移>:指定第二个点或<使用第一个点作为位移>:命令:命令:命令:命令:命令: _move 找到 2 个指定基点或[位移(D)] <位移>:指定第二个点或<使用第一个点作为位移>:命令:命令:命令: _mirror选择对象: 找到1 个选择对象: 找到1 个,总计 2 个选择对象:指定镜像线的第一点: 指定镜像线的第二点:要删除源对象吗?[是(Y)/否(N)] <N>:命令:命令:命令: _chamfer(“修剪”模式) 当前倒角距离1 = 0.0000,距离2 = 0.0000选择第一条直线或[放弃(U)/多段线(P)/距离(D)/角度(A)/修剪(T)/方式(E)/多个(M)]:选择第二条直线,或按住Shift 键选择直线以应用角点或[距离(D)/角度(A)/方法(M)]: 命令:命令: 指定对角点或[栏选(F)/圈围(WP)/圈交(CP)]:命令:命令:命令: _chamfer(“修剪”模式) 当前倒角距离1 = 0.0000,距离2 = 0.0000选择第一条直线或[放弃(U)/多段线(P)/距离(D)/角度(A)/修剪(T)/方式(E)/多个(M)]:选择第二条直线,或按住Shift 键选择直线以应用角点或[距离(D)/角度(A)/方法(M)]: 命令:命令:命令: _chamfer(“修剪”模式) 当前倒角距离1 = 0.0000,距离2 = 0.0000选择第一条直线或[放弃(U)/多段线(P)/距离(D)/角度(A)/修剪(T)/方式(E)/多个(M)]:选择第二条直线,或按住Shift 键选择直线以应用角点或[距离(D)/角度(A)/方法(M)]: 命令:命令:命令: _chamfer(“修剪”模式) 当前倒角距离1 = 0.0000,距离2 = 0.0000选择第一条直线或[放弃(U)/多段线(P)/距离(D)/角度(A)/修剪(T)/方式(E)/多个(M)]:选择第二条直线,或按住Shift 键选择直线以应用角点或[距离(D)/角度(A)/方法(M)]:_mirror 找到2 个指定镜像线的第一点: 指定镜像线的第二点:要删除源对象吗?[是(Y)/否(N)] <N>:命令:命令:命令: _trim当前设置:投影=UCS,边=无选择剪切边...窗口(W) 套索–按空格键可循环浏览选项找到0 个选择对象或<全部选择>: 指定对角点: 找到12 个选择对象: 找到1 个,总计13 个选择对象: 找到1 个,总计14 个选择对象: 找到1 个,总计15 个选择对象: 找到1 个,总计16 个选择对象: 找到1 个,总计17 个选择对象: 找到1 个,总计18 个选择对象:选择要修剪的对象,或按住Shift 键选择要延伸的对象,或[栏选(F)/窗交(C)/投影(P)/边(E)/删除(R)/放弃(U)]: 指定对角点: 指定对角点:窗交窗口中未包括任何对象。
机械制图 第7章 零 件 图

图7–17 泵体的尺寸标注
第7章 零件图
7.4 零件图的技术要求
7.4.1 表面粗糙度
1. 表面粗糙度的概念
无论用何种方法加工的表面,都不会是绝对光滑 的,在显微镜下可看到表面的峰、谷状(如图 7–18 所 示)。表面粗糙度是指零件加工表面上具有的较小间 距和峰、谷组成的微观几何形状特性。
(3) 工作位置原则。主视图应尽量表示零件在机器上
的工作位置或安装位置。如图7–4所示吊钩。
第7章 零件图
轴
尾座
图7–3 轴类零件的加工位置
第7章 零件图
图7–4 吊钩的工作位置
第7章 零件图
零件主视图的选择并不一定要完全符合上述三条原 则,而应根据零件的工作位置、安装位置或加工位置, 选择最能反映零件结构形状特征的视图作为主视图。 2. 其它视图的选择 主视图确定后,再按完整、清晰地表达零件各部分
计基准或工艺基准,如图7–9所示。
第7章 零件图
2. 标注定位、定形尺寸 从基准出发,标注定位、定性尺寸有以下几种形式。
1) 链状式
零件同一方向的几个尺寸依次首尾相连,称为链状 式。链状式可保证各端尺寸的精度要求,但由于基准 依次推移,使各端尺寸的位置误差受到影响。如图 7– 10所示
第7章 零件图
① 基本尺寸:根据零件设计要求所确定的尺寸。 ② 实际尺寸:通过测量得到的尺寸。 ③ 极限尺寸:允许尺寸变动的两个界限值。 ④ 上、下偏差:最大、最小极限尺寸与基本尺寸的 代数差分别称为上偏差、下偏差。国标规定:孔的上、
称为开口环),以保证其它重要尺寸的精度。因此,图
7–12中注出零件总长c±0.1,而e±0.1是不应标注的。
第7章 零件图
2. 满足工艺要求 (1) 按加工顺序标注尺寸,既便于看图,又便于加 工测量,从而保证工艺要求,如表7–1所示齿轮轴的加 工顺序及尺寸标注。齿轮轴的尺寸标注如图 7–14 所示。
圆柱齿轮齿轮图
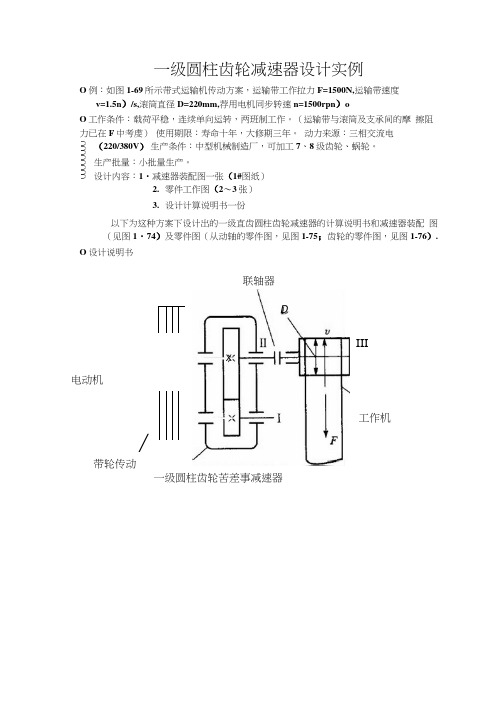
一级圆柱齿轮减速器设计实例O例:如图1-69所示带式运输机传动方案,运输带工作拉力F=1500N,运输带速度v=1.5n)/s,滚筒直径D=220mm,荐用电机同步转速n=1500rpn)oO工作条件:载荷平稳,连续单向运转,两班制工作。
(运输带与滚筒及支承间的摩擦阻力已在F中考虔)使用期限:寿命十年,大修期三年。
动力来源:三相交流电(220/380V)生产条件:中型机械制造厂,可加工7、8级齿轮、蜗轮。
生产批量:小批量生产。
设计内容:1•减速器装配图一张(1#图纸)2.零件工作图(2〜3张)3.设计计算说明书一份以下为这种方案下设计出的一级直齿圆柱齿轮减速器的计算说明书和减速器装配图(见图1・74)及零件图(从动轴的零件图,见图1-75;齿轮的零件图,见图1-76). O设计说明书联轴器电动机DX/带轮传动一级圆柱齿轮苦差事减速器III工作机OOOOOOOO31 30292827◎n 29403536122±0.010540533513810 11 12 13 14 15 I21H7/r6「n d45k633 32 31* 26 2540] GB 93—198? 垫 GB 6170^1986 " M1065 Mn 39 38 GB 5782-1986M10x35 37 36 35 34 螺母 螺程Q235 Q235 技术待性功率:2.2 kW :高速轴转速:746.7 (r/min);传动比:3.659。
技术要求 1・装配的,所有零件用煤油淸洗,滚动釉承用汽油淸洗•机体内不许 有任何杂物存在。
内壁涂上不被机油浸蚀的涂料两次; 2-喊合测隙用铅丝检验不小于0・16 m 叫 铅丝不得大于最小覽隙的 四倍; 3・用涂色法检验斑点。
按圾髙接触斑点不小于40% ;按悔长接触斑点 不小于50%。
必要时可用研磨或刮后研磨以便改善接触悄况; 4.深构球紬承轴向间隙为0.2-0.5 mm ;5・检査滅速器剖分面、齐接触面及密封处,均不许漏油。
机械制图第7章 零件图
零件图
形状特征原则
选取能将零 件各组成部分的 结构形状以及相 对应的位置反映 得最充分的方向 作为主视图投射 方向
零件图
该方向投影 最能显示零件的 形状特征,故作 为主视图投射方 向。
零件图
加工位置原则
按照零件在主要加工工序中的装夹位置 选取主视图,使主视图尽量与加工位置一 致,以便制造者看图。
零件图
二、典型结构的尺寸标注
锪平面
锥形沉孔
零件图
二、典型结构的尺寸标注
柱形沉孔
倒角
零件图
§7-4 零件图的技术要求
一、表面结构的图样表示及标注方法 二、极限、公差、偏差 三、形状和位置公差简介
四、材料的热处理及表面处理
零件图
一、表面结构的图样表示法
表面结构是表面粗糙度、表面波纹度、表面缺陷、 表面纹理和表面几何形状的总称,本节主要介绍常用 的表面粗糙度表示法。
Z
表面轮廓
Ra
X O 取样长度L
基准线
零件图 2.表面结构要求符号
2H
画法比例 H=3.5mm 线宽 0.35mm
H
60°
60°
零件图
符号名称 基本图形符号 符号 含义 未指定工艺方法的表面, 当通过一个注释解释时可 单独使用。 用去除材料方法获得的表 面,仅当其含义是“被加 工表面“时可单独使用 不去除材料的表面,也可 用于表示保持上道工序形 成的表面,不管这种状况 是通过去除或不去除材料 形成的 在以上各种符号的长边上 加一横线,以便注写对表 面结构的各种要求
该零件主要加工工序为车削,取轴线水平放置, 并取剖视表达内部结构。为表达端面、孔、筋等的分 布,配置左视图。配置辅助视图表达局部结构。
零件图