15-云模型专题解析
高考化学复习专题检测—物质结构与性质(含解析)
高考化学复习专题检测—物质结构与性质(含解析)一、选择题(本题包括25小题,每小题2分,共50分,每小题只有一个选项符合题意)1.(2023·黑龙江省绥化市第九中学高三质检)已知在一定条件下,SO2也能体现其氧化性,例如:2H2S+SO2=3S+2H2O,下列化学用语使用正确的是()A.SO2的VSEPR模型:B.HS-电离的离子方程式:HS-+H2O H2S+OH-C.基态硫原子p x轨道的电子云轮廓图:D.基态氧原子最外层电子的轨道表示式:【答案】C【解析】A项,二氧化硫中心原子S的价层电子对数为3,有1对孤电子对,S杂化类型为sp2,VSEPR模型为平面三角形,A错误;B项,HS-电离的离子方程式HS-H++S2-,B错误;C项,基态硫原子P x轨道的电子云轮廓为哑铃型,C正确;D项,基态氧原子最外层电子的轨道表示式:,D错误;故选C。
2.(2023·江苏省南京市江宁区高三期中)尿素CO(NH2)2是一种高效化肥,也是一种化工原料。
反应CO2+2NH3CO(NH2)2+H2O可用于尿素的制备。
下列有关说法不正确...的是()A.NH3与CO(NH2)2均为极性分子B.N2H4分子的电子式为C.NH3的键角大于H2O的键角D.尿素分子σ键和π键的数目之比为6∶1【答案】D【解析】A项,NH3分子为三角锥形,为极性分子,CO(NH2)2中的N原子与NH3中的N成键方式相同,所以二者均为极性分子,A正确;B项,N原子的最外层电子数为5个,要达到稳定结构,N2H4的电子式为:,B正确;C项,NH3分子中有3个σ键,1对孤电子对,H2O分子中有2个σ键和2对孤电子对,孤电子对与成键电子对之间的排斥力大于成键电子对之间的排斥力,所以H2O的键角小于NH3中的键角,C正确;D项,1个单键1个σ键,1个双键1个σ键和1个π键,尿素中含有6个单键和1个双键,7个σ键和1个π键,尿素分子σ键和π键的数目之比为7∶1,D错误;故选D。
精品解析:2024年山东省济宁市中考地理真题(解析版)
C.沪昆线—京沪线—京哈线D.沪昆线—京包线—京哈线
【答案】16. C 17. A 18. C
【解析】
【16题详解】
哈尔滨举办冰雪节的自然条件是纬度较高,冬季寒冷漫长,河流冰层厚,冰雕原材料充足;积雪厚且雪期长,冰雕保存时间长,①③正确;举办冰雪节经验丰富、当地居民热情好客不是自然条件,②④错误。故选C。
【2题详解】
由题干知,相邻节气间隔约15天。立秋和立冬相隔6个节气,故大约经历了90天,故选C。
【3题详解】
白菜的生长期大约在8月初至11月初。8 - 11月温度是逐渐降低的过程,说明白菜具有喜温凉、耐寒的生长习性,故选B。
【点睛】二十四节气是我国古代人民通过观察太阳周年运动,以黄河中下游地区的天象、气温、降水和物候的时序变化规律为基准所形成的知识体系和社会实践,自秦汉至今指导着我国传统农业生产和日常生活。
2024年春节期间,家住兖州区李家湾小区的小亮一家从大安机场乘飞机外出旅游,用手机导航确定去机场的路线,屏幕显示如下图。完成下面小题。
4.去机场的路线中,在246省道上的行驶方向是()
A.从东南向西北B.从西北向东南C.从正西向正东D.从正东向正西
5.去机场途中,小亮帮开车的爸爸导航。小亮对电子地图进行“放大”或“缩小”操作,查询沿途更多信息。小亮的操作可以改变()
【15题详解】
欧洲西部地区属于温带海洋性气候,适合多汁牧草的生长,加上生产规模大,生产机械化水平高,畜牧业发达,A正确。欧洲西部是世界上工业最发的地区之一,工农业普遍实现了高度的机械化,自动化,信息化,B错误。欧洲西部有得天独厚的自然旅游资源和丰富的历史文化遗迹,C错误。欧洲西部是世界上较为稠密的地区之一,但也是人口老龄最化严重的地区之一,自然增长率较低,D错误。故选A。
BIM建筑模型练习题

BIM技术旳解析应用单项选择题:1、BIM是以建筑工程项目旳(A. 各项有关信息数据)作为模型旳基础,进行建筑模型旳建立,通过数字信息仿真模拟建筑物所具有旳真实信息。
2、如下有关BIM旳概念旳表述,对旳旳是(D. BIM是一种处理方案旳集合)。
3、BIM最大旳意义在于(D. 全生命周期应用)。
4、BIM让人们将以往旳线条式旳构件形成一种三维旳立体实物图形展示在人们旳面前,这体现了BIM旳( A. 可视化)特点。
5、最早有关 BIM 旳概念是(B.1975.0)年提出旳。
6、(C. 《2023-2023 年建筑业信息化发展纲要》)旳颁布,标志着 BIM 技术真正成为我国建筑信息化旳主线,也成为我国旳“BIM 元年”。
7、BIM 技术最先从(B. 美国)发展开来。
8、BIM在施工阶段应加入旳信息有(D. 材料)。
9、全生命周期旳广义定义是(C.涵盖并服务于建筑乃至都市旳全生命周期)。
10、实现BIM全生命周期旳关键在于BIM模型旳(B.信息传递)。
11、(A.施工建设)中旳风险属于显性风险。
12、如下不属于BIM应用产生旳收益和效果旳是(C.协议价格提高)。
13、BIM原则化研究工作旳实行主体是(A. 企业级)。
14、BIM 构件分类以(A. 企业属性)为基础构建管理体系。
15、以矩形截面型钢构造框架梁为例进行面分法分类时,可按(C. 功能、材质、形状)进行。
16、如下不是企业级 BIM 原则化政策实行路线旳内容旳是(B. 全面把握)。
17、建筑工业化和(C. 建筑业信息化)是建筑业可持续发展旳两大构成部分。
18、BIM 旳一种基本前提是(A. 项目全寿命期内不一样阶段不一样利益有关方旳协同)。
19、(B. 建筑信息模型)是指全寿命期工程项目或其构成部分物理特性、功能特性及管理要素旳共享数字化体现。
20、工程项目全寿命期可划分为(B. 筹划与规划、勘察与设计、施工与监理、运行与维护、改造与拆除)五个阶段。
专题1.2 梯子滑动模型(强化)(解析版)
专题1.2 梯子滑动模型1.如图,一架2.5m长的梯子,斜立在一竖直的墙上,这时梯子的底部距墙底端0.7m,如果梯子的顶端沿墙下滑0.4m,那么梯子的底部将平滑( )A.0.9m B.1.5m C.0.5m D.0.8m【解答】解:Q梯子的顶端下滑了0.4米,A C m\¢=,2Q在Rt△A B CA C m¢=,¢¢=,2A B m¢¢中, 2.5\¢===,B C m1.5BB B C BC m\¢=¢-=-=.1.50.70.8故选:D.2.如图,一根长25m的梯子,斜立在一竖直的墙上,这时梯足距离底端7m.如果梯子的顶端下滑4m,那么梯足将滑动( )A.7m B.8m C.9m D.10m=,24m=,15m-=.m m m1578故选:B .3.一架2.5米长的梯子靠在一座高10米的建筑物上,此时梯子底部离建筑物墙面0.7米.若梯子的顶部滑下0.4米,则梯子的底部向外滑出距离为( )A .1米B .0.8米C .0.6米D .0.4米【解答】解:在Rt AOB D 中,根据勾股定理222AB AO OB =+,可以求得:2.4OA =(米),现梯子的顶部滑下0.4米,即 2.40.42OC =-=(米),且 2.5CD AB ==米,所以在Rt COD D 中,222DO CD CO =-,即 1.5DO ==(米),所以梯子的底部向外滑出的距离为1.50.70.8-=(米).答:梯子的底部向外滑出的距离为0.8米,故选:B .4.要登上12m 高的建筑物,为了安全需使梯子底端离建筑物5m ,则梯子的长度至少为( )【解答】解:如图所示:12AC m =Q ,5BC m =,\在Rt ABC D 中,13()AB m ==,故选:A .5.如图,一根长25m 的梯子,斜靠在一竖直的墙上,这时梯子的底端距墙底端7m .如果梯子的顶端下滑4m ,那么梯子的底端将向右滑动( )A .15mB .9mC .7mD .8m24()m =,15()m =,1578()m -=.故选:D .6.如图,一个梯子斜靠在一竖直的墙AO 上,测得4AO m =,若梯子的顶端沿墙下滑1m ,这时梯子的底端也下滑1m ,则梯子AB 的长度为( )【解答】解:设BO x =m ,由题意得:1AC m =,1BD m =,4AO m =,在Rt AOB D 中,根据勾股定理得:222224AB AO OB x =+=+,在Rt COD D 中,根据勾股定理得:22222(41)(1)CD CO OD x =+=-++,22224(41)(1)x x \+=-++,解得:3x =,5()AB m \===,即梯子AB 的长为5m ,故选:A .7.如图,小巷左右两侧是竖直的墙,一架梯子斜靠在左墙时,梯子底端到左墙角的距离为0.7米,顶端距离地面2.4米,如果保持梯子底端位置不动,将梯子斜靠在右墙时,顶端距离地面2米,则小巷的宽度为( )A .2.2米B .2.3米C .2.4米D .2.5米【解答】解:在Rt ACB D 中,90ACB Ð=°Q ,0.7BC =米, 2.4AC =米,2220.7 2.4 6.25AB \=+=.在Rt △A BD ¢中,90A DB Т=°Q ,2A D ¢=米,222BD A D A B +¢=¢,222 6.25BD \+=,2 2.25BD \=,0BD >Q ,1.5BD \=米,0.7 1.5 2.2CD BC BD \=+=+=米.故选:A .二.填空题(共6小题)8.如图,一架梯子AB长5米,底端离墙的距离BC为3米,当梯子下滑到DE时,1AD=米,则BE= 1 米.AC===(米【解答】解:在Rt ABCD中,根据勾股定理,可得:4),\=-=-=(米),DC AC AD413CE===(米),在Rt DCED中,4\=-=-=(米),431BE CE BC故答案为:1.9.如图,一架10米长的梯子斜靠在墙上,梯顶A刚好抵达8米高的路灯.当师傅沿梯上去修路灯时,梯顶A下滑到A¢处,前后梯脚B、B¢间的距离为2米,则下滑后梯顶离路灯 2 米.【解答】解:在直角三角形AOB中,根据勾股定理,得:==,6()OB m根据题意,得:628()OB m ¢=+=,又Q 梯子的长度不变,\在Rt △A OB ¢¢中,根据勾股定理,得:6()OA m ¢==.则862()AA m ¢=-=.答:梯顶离路灯2米.故答案为:2.10.如图,有互相垂直的两面墙OM ,ON ,梯子6AB m =,两端点A ,B 分别在两面墙上滑动(AB 长度不变),P 为AB 的中点,柱子4CD m =,底端C 到墙角O 的距离为6m .在此滑动过程中,点D 到点P 的距离的最小值为 3)- m .【解答】解:Q 木棍的中点为P ,AOB D 为直角三角形,132OP AB m \==,即点P 到点O 的距离为3m ,\点P 的轨迹为以O 为圆心,3m 为半径的弧上,如图,连接OD 交O e 于P ,则D 到P 的距离最小.在弧上任取一点P ¢,连接OP ¢,DP ¢,OP DP OD OP DP ¢+¢>=+Q ,OP OP =¢,DP DP \¢>,DP \为最小值,在Rt OCD D 中,6OC =,4CD =,OD \===,3)()PD OD OP m \=-=-,故答案为:3)-.11.如图,“人字梯”放在水平的地面上,AB AC =,当梯子的一边与地面所夹的锐角a 为60°时,两梯角之间的距离BC 的长为2m .周日亮亮帮助妈妈整理换季衣服,先使a 为60°,后又调整a 为45°,则梯子顶端A 离地面的高度下降了 - m .【解答】解:如图1所示:过点A 作AD BC ^于点D ,由题意可得:60B C Ð=Ð=°,则ABC D 是等边三角形,故2BC AB AC m ===,则2sin 60AD =°=,如图2所示:过点A 作AE BC ^于点E ,由题意可得:60B C Ð=Ð=°,则ABC D 是等腰直角三角形,AC AB =,则12AE BC ==,故梯子顶端离地面的高度AD 下降了m .故答案为:.12.如图,一架2.6m长的梯子AB斜靠在一竖直的墙AO上,这时AO为2.4m当梯子的顶端A沿墙向下滑的距离AC与梯子底端B向外移的距离BD相等时,AC的长是 1.4 m.【解答】解:90AB=, 2.4Q, 2.6OA=,Ð=°O\===,OB1设AC BD x==,OD x=+,\=-,1OC x2.4222\=+,CD OC OD222\=-++,2.6(2.4)(1)x x解得: 1.4x=,\=.1.4AC故答案为:1.4.13.如图所示,一个梯子AB长2.5米,顶端A靠墙AC上,这时梯子下端B与墙角C距离为0.7米,梯子滑动后停在DE的位置上,测得BD长为1.3米,则梯子顶端A下滑了 0.9 米.【解答】解:在Rt ABC D 中, 2.5AB =米, 1.5BC =米,2.4AC \===米,在Rt ECD D 中, 2.5AB DE ==米, 1.30.72CD =+=米,1.5EC \===米,2.4 1.50.9AE AC CE \=-=-=米.故答案为:0.9.三.解答题(共7小题)14.如图,一架长5m 的梯子AB 斜靠在墙AC 上,90C Ð=°,此时,梯子的底端B 离墙底C 的距离BC 为3m .(1)求此时梯子的顶端A 距地面的高度AC ;(2)如果梯子的顶端A 下滑了2m ,那么梯子的顶端B 在水平方向上向右滑动了多远?【解答】解:(1)90C Ð=°Q ,5AB m =,3BC m =,4()AC m \===,答:此时梯顶A 距地面的高度AC 是4m ;(2)Q 梯子的顶端A 下滑了2m 至点A ¢,422()A C AC A A m \¢=-¢=-=,在Rt △A CB ¢¢中,由勾股定理得:222A C B C A B ¢+¢=¢¢,即22225B C +¢=,)B C m \¢=,3)()BB CB BC m \¢=¢-=-,答:梯子的底端B 在水平方向滑动了3)m -.15.如图,一架梯子AB斜靠在某个走廊竖直的左墙上,顶端在点A处,底端在水平地面的点B处.保持梯子底端B的位置不变,将梯子斜靠在竖直的右墙上,此时梯子的顶端在点E 处.(1)如图1,若顶端A距离地面的高度AC为2.4米,BC为0.7米.①则梯子的长为 2.5 米;②若顶端E距离地面的高度EF比AC少0.4米,求走廊的宽是多少米?(2)如图2,G是线段AE上中点左侧一点,若2×=,则梯子的长为 BG=,AG GE米.【解答】解:(1)①在Rt ABCD中,AB===(米),2.5故答案为:2.5;②Q梯子的长度不变,\==,BE AB2.5Q顶端E距离地面的高度EF比AC少0.4米,EF\=-=,2.40.42在Rt BEFD中,BF===,1.50.7 1.5 2.2CF BC BF \=+=+=(米),答:走廊的宽是2.2米;(2)如图,设AE 的中点为H ,连结BH ,设AG x =米,AG GE ×=Q,GE \米,设梯子的长为y 米,AB BE =Q ,AE 的中点为HBH AE \^,在Rt ABH D 中,22222BH AB AH y =-=-,在Rt BGH D 中,222222)BH BG GH x =-=-,22222)yx \-=--,化简得:24y =+1y \=.\梯子的长为1)+米,故答案为:1)+.16.某校秉承“学会生活,学会学习,学会做人”的办学理念,将本校的办学理念做成宣传牌()AB ,放置在教室的黑板上面(如图所示).在三月雷锋活动中小明搬来一架梯子(5AE =米)靠在宣传牌()AB A 处,底端落在地板E 处,然后移动的梯子使顶端落在宣传牌()AB 的B处,而底端E 向外移到了1米到C 处(1CE =米).测量得4BM =米.求宣传牌()AB 的高度(结果用根号表示).【解答】解:由题意可得:5AE BC ==米,4BM =米,1EC =米,在Rt MBC D 中,3MC ==(米),则312EM =-=(米),在Rt AEM D 中,AM =),故4)AB AM BM =-=-米,答:宣传牌()AB 的高度为4)-米.17.在一次消防演习中,消防员架起一架25米长的云梯,斜靠在一面墙上;梯子底端C 离墙20米,如图.(1)求这个梯子的顶端A 距地面有多高?(2)如果消防员接到命令,要求梯子的顶端上升4米(云梯长度不变),那么云梯底部在水平方向应滑动多少米?【解答】解:(1)由题意得:25AC =米,20BC =米,则15AB ===(米).答:这个梯子的顶端距地面有15米;(2)由题意得:4EA =米,则19BE =米,BD ===),20BC =Q 米,(20CD \=-米,答:云梯的底部在水平方向应滑动(20-米.18.一梯子AC 长2.5m ,如图那样斜靠在一面墙上,梯子底端离墙0.7m .(1)这架梯子的顶端离地面有多高?(2)设梯子顶端到水平地面的距离为m ,底端到垂直墙面的距离为n ,若m a n=,根据经验可知:当2.7 5.6a <<时,梯子最稳定,使用时最安全.若梯子的顶端下滑了0.4m ,请问这时使用是否安全.【解答】解:(1)由题意可知,90B Ð=°, 2.5AC m =,0.7BC m =,2.4()AB m \===,答:这架梯子的顶端离地面有2.4m 高;(2)这时使用不安全,理由如下:由题意得:0.4AA m ¢=,在Rt △A BC ¢¢中, 2.40.42()A B AB AA m ¢¢=-=-=, 2.5A C m ¢¢=,1.5()BC m ¢\===,\242.71.53m n ==<,\这时使用不安全.19.生活经验表明,靠墙摆放梯子时,若梯子底端离墙的距离约为梯子长度的13,则梯子比较稳定,如图,AB 为一长度为6米的梯子.(1)当梯子稳定摆放时,它的顶端能达到5.7米高的墙头吗?1.414)»(2)如图2,若梯子底端向左滑动使OD=留1位小数)【解答】解:(1)由题意可得,6AB m=,123OB AB m==,在Rt AOBD中,由勾股定理可得,5.656AO===»,5.656 5.7<Q,\梯子的顶端不能到达5.7米高的墙头;(2)在Rt DOCD中,由勾股定理可得,OC===米,1.4AC OA OC\=-==»米.\梯子的顶端将下滑动1.4米.20.如图,一个梯子AB斜靠在一面墙上,梯子底端为A,梯子的顶端B距地面的垂直距离为BC的长.(1)若梯子的长度是10m,梯子的顶端B距地面的垂直距离为8m.如果梯子的顶端下滑1m,那么梯子的底端A向外滑动多少米?(2)设AB c=,BC a=,AC b=,且a b>,请思考,梯子在滑动的过程中,是否一定存在顶端下滑的距离与底端向外滑动的距离相等的情况?若存在,请求出这个距离;若不存在,说明理由.【解答】解:(1)由题意知:10AB m =,8BC m =,由勾股定理得:6()AC m ==,当梯子的顶端下滑1m 时,如图,7CB m ¢\=,由勾股定理得)A C m ¢==,6)AA A C AC m ¢¢\=-=-,\梯子的底端A 向外滑动6)m -;(2)存在顶端下滑的距离与底端向外滑动的距离相等的情况,设梯子底端向外滑动x 米,则222()()a x b x c -++=,解得1x a b =-,20x =(舍),x a b \=-,即梯子底端向外滑动()a b -米.。
八年级上期末物理试题精选专题及解析---机械运动

八年级上期末物理试题精选专题及解析---机械运动1.(2022·黑龙江哈尔滨·八年级期末)南朝诗人萧绎在《早发龙巢》有诗句“不疑行船动,唯看远树来”,其中“唯看远树来”的参照物可能的是()A.河岸B.行船C.岸边的房屋D.远处的树2.(2022·黑龙江齐齐哈尔·八年级期末)《吕氏春秋·察今篇》记载了刻舟求剑的故事,当中有这样的文句:“舟已行矣,而剑不行,求剑若此,不亦惑乎!”文中对舟和剑运动状态的描述,可选择的共同参照物是()A.舟中人B.舟C.剑D.江岸3.(2022·黑龙江七台河·八年级期末)下列运动中,不属于机械运动的是A.月球绕着地球转B.公路上行驶的汽车C.空气的流动 D.洒在水里的糖使水变甜4.(2022·黑龙江哈尔滨·八年级期末)2020年6月30日,随着最后一颗组网卫星成功定点于地球同步轨道,中国建成世界领先的“北斗”导航系统。
这里的“同步”是指卫星()A.相对太阳静止B.相对火星静止C.相对地球静止D.相对月球静止5.(2022·黑龙江哈尔滨·八年级期末)小红和小华站在公交站台等公交车,小红对小华说自己是运动的,她选择的参照物是()A.公交站台B.小华C.路边的树木D.行驶过来的公交车6.(2022·黑龙江省八五七农场第一中学八年级期末)甲、乙两列火车在两条平行的铁轨上匀速行驶,两车交汇时,甲车座位上的乘客从车窗看到地面上的树木向北运动,看到乙车向南运动.由此可判断A.甲、乙两车都向南运动B.甲、乙两车都向北运动C.甲车向南运动,乙车向北运动D.甲车向北运动,乙车向南运动7.(2022·黑龙江鹤岗·八年级期末)如图所示,是穿行在餐厅的机器人端着托盘送餐时的情景.若认为托盘是静止的,则所选择的参照物可能是A.地面B.机器人C.餐桌D.墙壁8.(2022·黑龙江大庆·八年级期末)如图所示的四个图像中,物体的运动速度相同的是()A.甲、乙B.乙、丙C.丙、丁D.甲、丁9.(2022·黑龙江牡丹江·八年级期末)这是宋代诗人陈与义的一首诗:“飞花两岸照船红,百里榆堤半日风,卧看满天云不动,不知云与我俱东”,在诗人看来云是不动的,他选择的参照物是()A.岸边的江堤B.江边的树C.树上的飞花D.诗人的小船10.(2022·黑龙江鸡西·八年级期末)行驶中列车行李架上的物品相对于下列哪个物体是静止的()A.树木B.房屋C.车厢的座椅D.车厢内走过的列车员11.(2022·黑龙江哈尔滨·八年级期末)一物体在运动过程中的路程随时间的变化关系如图所示,由图象可知A.物体在2~4 s内做匀速直线运动B.物体在4~6 s内运动的速度是10 m/sC.物体在0~2 s内比在4~6 s内运动的慢D.物体在0~6 s内运动的路程是10 m12.(2022·黑龙江哈尔滨·八年级期末)如图所示,小明利用学生刻度尺测量了一个物体的长度,记录的测量结果正确的是()A.2.15cm B.1.15cm C.2.2cm D.1.3cm 13.(2022·黑龙江·肇东市第十中学八年级期末)下列成绩记录符合实际的是()A.立定跳远成绩为5m B.投掷实心球,成绩为6.5mC.女子800m长跑成绩为40s D.男子1000m长跑成绩为50s 14.(2022·黑龙江·虎林市实验中学八年级期末)用图象可以表示物体的运动规律,图中可以用来表示物体做匀速直线运动的是()A.①和②B.③和④C.①和③D.②和④15.(2022·黑龙江哈尔滨·八年级期末)平直轨道上行驶的火车中,放在车厢内小桌上的苹果相对于下列哪个物体是运动的()A.坐在车厢椅子上的乘客B.这列火车的机车C.关着的车门D.从旁边走过的列车员16.(2022·黑龙江·虎林市实验中学八年级期末)小华家距学校2.5 km,他骑自行车的平均速度是10 km/h,学校要求早上7点准时到校,小华从家中出发的时间一般不能晚于早上()A.6︰45 B.6︰30 C.6︰20 D.6︰50 17.(2022·黑龙江哈尔滨·八年级期末)在新型汽车的研制中,将汽车模型放在风洞中固定不动,让风(高速流动的空气)迎面吹来,可模拟汽车在高速行驶的情况.在此情境中下列说法正确的是()A.汽车模型相对于地面是运动的B.汽车模型相对于空气是运动的C.空气相对于地面是静止的D.空气相对于汽车模型是静止的18.(2022·黑龙江·大庆市北湖学校八年级期末)雷达是现代战争重要的军事装备。
专题12 物质结构与性质综合(题型突破)(测试)-2024年高考化学二轮复习讲练测(新(0002)

专题12 物质结构与性质综合(题型突破)(考试时间:75分钟试卷满分:100分)一、选择题(本题共15小题,每小题3分,共45分。
每小题只有一项是符合题目要求的)1.含有N3-、N5+的材料Pb(N3)2、N5AsF6可以用于炸药。
下列说法正确的是( )A.Pb属于d区元素B.基态As原子的d轨道与p轨道上的电子数之比为3:2C.N3-的空间构型为直线形D.基态F原子中,核外电子的空间运动状态有9种【答案】C【解析】A项,铅元素的原子序数为82,价电子排布式为6s26p2,处于元素周期表的p区,故A错误;B项,砷元素的原子序数为33,电子排布式为1s22s22p63s23p63d104s24p3,则原子的d轨道与p轨道上的电子数之比为10:15=2:3,故B错误;C项,等电子体具有相同的空间构型,N3-离子与二氧化碳分子的原子个数都为3、价电子数都为16,互为等电子体,二氧化碳的空间构型为直线形,则N3-离子的空间构型为直线形,故C正确;D项,核外电子的空间运动状态与原子轨道的数目相同,氟元素的原子序数为9,电子排布式为1s22s22p5,氟原子的原子轨道数目为5,则核外电子的空间运动状态有5种,故D错误;故选C。
2.(2024·江苏苏州高三期中)Na、Mg、Al均为第三周期元素。
下列说法正确的是( )A.离子半径:r(Na+)<r(Mg2+)<r(Al3+) B.第一电离能:I1(Na)> I1(Mg)> I1(Al)C.还原性:Na>Mg>Al D.碱性:NaOH<Mg(OH)2<Al(OH)3【答案】C【解析】A项,三种离子核外电子排布相同半径随核电荷数增大而减小,故A错误;B项,同周期元素第一电离能总体趋势:核电荷数越大,第一电离能越大,故B错误;C项,同周期元素,核电荷数越大金属性越弱,对应单质还原性越弱,故C正确;D项,金属性Na>Mg>Al,其对应最高价氧化物水化物碱性越弱,碱性:NaOH>Mg(OH)2>Al(OH)3,故D错误;故选C。
警务云深度解析

42
43
目录
一、建设历程 二、总体介绍 三、功能演示 四、建设探讨
警务云建设问题
双轨 并存
44
云计算架构 传统架构
公安部业务应用 山东警务云计算
45
警务云—省与市 全省一片云
主 体
标
主
准 五统一 干
安
应
全
用
运 行
六开放
个 人
安
数
全
据
数
开
据
发
总体规划
省厅
顶层设计
开发应用
各地
云端集成
支持各地应用创新
建设历程 共赴公安部汇报警务云建设情况
14
建设历程 建设警务云机房
山东警务云计算机房落户浪潮
15
建设历程 实施计划表
云安全 27%
云基础 20%
云应用 10%
云数据 16%
云平台 27%
16
建设历程 系统上线-警务千度开通
17
建设历程 系统上线-警务千度开通
18
建设历程 系统上线-警务千度开通
云主体
服务中心 警务千度 人像识别
多点碰撞
32
山东警务云一期简介
应用服务中心 开发服务中心 个人服务中心 数据服务中心
33
山东警务云一期简介
运维中心
34
山东警务云
打破了部 门警种的业务应
用壁垒
现代警务 工作与云计算 技术紧密融合
山东 警务云计算
实现了公 安大数据的深
度挖掘
推动了合 成应用和高端应 用再上新台阶
警务云深度解析
-山东警务云实践
政法行业部 英杰 2014年5月
2024届北京市西城区高三一模语文试题(含答案与解析)_9110

2024届北京市西城区高三一模试题语文本试卷共10页,共150分。
考试时长150分钟。
注意事项:1.答卷前,考生务必将自己的姓名、准考证号填写在答题卡上.2.回答选择题时,选出每小题答案后,用2B铅笔把答题卡上对应题目的答案标号涂黑.如需改动,用橡皮擦干净后,再选涂其他答案标号.回答非选择题时,将答案写在答题卡上,写在本试卷上无效.3.考试结束后,将本试卷和答题卡一并交回.一、本大题共5小题,共18分。
阅读下面材料,完成小题。
材料一今日世界之复杂、变化之迅捷,已远超我们的想象,看似遥不可及的未来正变得触手可及。
如今,百度Apollo(阿波罗)开放平台可以引导百余辆自动驾驶汽车在港珠澳大桥上奔驰,可穿戴技术能让你的衣服监控心率,广东省东莞市长安镇诞生了首个无人工厂……人工智能机器正大举进入全球制造业,代替人类在做许多工作。
从基因测序到纳米技术,从可再生能源到量子计算,各领域的技术突破风起云涌,新技术不断催生着更新、更强大的技术,并不断交叉迭代,融合应用到各个领域,推动各行各业转型升级,快速向数字化、智能化迈进。
人类已跨入第四次工业革命时代(即利用信息化技术促进产业变革的智能化时代),信息爆炸、大裂变式的脑力增长正以全新的、强有力的且令人惊诧的方式,挑战和重塑着社会根基,改变着我们的生活、工作和学习方式。
世界变化太快了,引起了人们对“乌卡时代”(VUCA)的共鸣。
所谓“乌卡时代”,即指具有易变性(volatile)、不确定性(uncertain)、复杂性(complex)、模糊性(ambiguous)的时代。
“易变性”指事情变化非常快,“不确定性”指不知道下一步的方向在哪儿,“复杂性”指每件事会牵连影响到另外一些事情,“模糊性”指关系不明确。
这意味着,秉持单一知识类型、技术手段,应对单一社会生活情境的时代一去不返。
苹果公司现任CEO蒂姆·库克说:“我不担心机器会像人一样思考,我担心的是人会像机器一样思考。
专题3物态变化真题强化训练(原卷版+解析)

专题3 《物态变化》真题强化训练一、单选题1.(2021四川成都中考)用实验室常用温度计测量烧杯中热水的温度时,下列说法正确的是()A.温度计的感温泡可以碰到容器壁B.将感温泡浸入热水马上读出温度C.读数时温度计可以离开被测热水D.读数时如图所示,测量数据偏大2.(2021广西柳州中考)如图所示,在1个标准大气压下,冰熔化成水的过程中,其温度保持在()A.100℃B.37℃C.20℃D.0℃3.(2021黑龙江哈尔滨中考)下列物态变化现象中属于熔化的是()A.冰雪的消融B.雾凇的形成C.云海的形成D.白雾的消散4.(2021广西桂林中考)下列物体中属于晶体的是()A.橡胶B.沥青C.冰块D.石蜡5.(2021山东菏泽中考)下面四幅图片所展示的自然现象中,属于凝固现象的是()A.冰雪融化B.滴水成冰C.气结成露D.气凝结霜6.(2021青海西宁市教育科学研究院中考)口罩成为常态防疫“神器”,戴眼镜的人们常因口罩佩戴出现镜片模糊的情况,这是液化现象。
下列实例中与它物态变化相同的是()A.初春,冰雪消融B.夏天,清晨草叶或树叶上形成露珠C.深秋,屋顶的瓦上结了一层霜D.冬天,室外冰冻的衣服变干了7.(2021广西河池中考)夏天打开冰箱取冰棍时,冰箱里冒出大量“白气”,同时发现冰箱内壁附有“白霜”,取出的冰棍很快就化了。
下列描述正确的是()A.冒出“白气”是汽化现象B.冰棍化了是熔化现象C.“白霜”是凝固形成的D.冰棍是凝华形成的8.(2021辽宁锦州中考)周末下午烈日炎炎,小明从冰箱的冷藏室中取出一罐可乐,放在餐桌上,不一会儿这罐可乐“大汗淋漓”。
下列现象与此物态变化相同的是()A.水烧开后壶嘴附近冒“白气”B.衣箱里的樟脑球逐渐变小C.阳光下的湿衣服逐渐变干D.燃烧的蜡烛在“流泪”9.(2021江苏宿迁中考)下列图示现象或应用中的物态变化是吸热过程的是()A.用冰袋降温B.花瓣上的露珠C.美丽的雾D.白雪和冰凌10.(2021湖北荆州中考)以下跟汽车有关的热现象中说法错误的是()A.冬天排气管冒出的“白气”,是空气液化形成的B.打开除雾功能,汽车玻璃上的“雾”很快消失,是汽化现象C.冬天,汽车水箱中加入适量酒精可以降低水的凝固点D.汽车空调制冷时,制冷剂汽化时吸热、液化时放热11.(2021湖北十堰中考)今年十堰市部分区域气温高达36℃,小明在教室使用电风扇吹风,感到凉爽,是因为()A.电风扇吹出的风,能吸收人体的热量B.电风扇吹出的风,能降低教室内的气温C.电风扇吹出的风,能加快人体表面汗液的蒸发D.电风扇吹出的风,能把人体周围的热空气带走12.(2021山东威海中考)下列对谚语中有关物态变化的分析正确的是()A.“雷打立春节,惊蛰雨不歇”——雨的形成是升华现象B.“钩钩云消散,晴天多干旱”——云的形成是汽化现象C.“春分前后怕春霜,一见春霜麦苗伤”——霜的形成是凝华现象D.“今冬麦盖三层被,来年枕着馒头睡”——雪的形成是液化现象二、填空题13.(2021江苏常州中考)中国科兴疫苗需保存在低于8℃的环境中。
《软绵绵的云》课件

《软绵绵的云》课件一、教学内容本节课我们将学习《软绵绵的云》,该部分内容属于《自然科学》教材第四章“气象万千”的第三节。
详细内容包括云的分类、形成原理、特点以及与天气变化的关系。
二、教学目标1. 让学生了解并掌握云的分类、形成原理和特点。
2. 培养学生观察和分析天气变化的能力。
3. 增强学生对自然科学的兴趣,提高科学素养。
三、教学难点与重点难点:云的形成原理和分类。
重点:云的特点及与天气变化的关系。
四、教具与学具准备教具:多媒体课件、实物模型、实验器材。
学具:笔记本、笔、实验报告单。
五、教学过程1. 导入:通过展示美丽的云彩图片,引发学生对云的兴趣,提出问题:“你们知道这些美丽的云彩是如何形成的吗?”2. 知识讲解:a. 云的分类:按高度分为高云、中云、低云;按形状分为积状云、层状云、波状云等。
b. 云的形成原理:讲解水汽凝结、云滴生长等过程。
c. 云的特点:介绍各种云的形状、颜色、高度等特征。
3. 实践情景引入:组织学生观察窗外或校园内的云彩,让学生根据所学知识进行分类和描述。
4. 例题讲解:讲解一道关于云的分类和特点的例题,引导学生运用所学知识解决问题。
5. 随堂练习:发放实验报告单,让学生根据观察到的云彩进行分类和描述。
六、板书设计1. 《软绵绵的云》2. 内容:a. 云的分类b. 云的形成原理c. 云的特点d. 云与天气变化的关系七、作业设计1. 作业题目:a. 请简述云的分类及各种云的特点。
b. 观察并描述一下你见过的最有趣的云彩。
2. 答案:a. 云的分类:高云、中云、低云;积状云、层状云、波状云等。
各种云的特点:形状、颜色、高度等。
b. 略。
八、课后反思及拓展延伸1. 反思:本节课学生对云的分类和特点掌握较好,但在云的形成原理方面存在一定难度,需要在下节课进行巩固。
2. 拓展延伸:a. 组织学生进行课外实践活动,观察不同天气下的云彩变化。
b. 邀请气象专家进行专题讲座,让学生了解更多关于气象的知识。
高考地理(精讲-精练-精析)专题15-地理信息技术的应用试题(含解析)

专题15 地理信息技术的应用【聚焦考点突破核心】一、遥感技术的应用1.目前遥感技术在资源普查、环境和灾难监测等方面运用广泛,具体应用分析如下:应用领域具体内容备注资源普查矿产资源隐藏矿产的地方有很多是地质断裂或环形构造带,较简洁借助遥感技术“发觉”矿产人们只须要分析遥感图像就可以划定隐藏矿产的大致区域生物资源通过遥感图像解译,用图像处理技术,提取植被的分布、类型、结构、健康状况、产量等数据为农业、林业、城市绿化、环境爱护等部门服务环境、灾难监测环境监测荒漠化、土壤盐渍化、海上冰山漂流、海洋生态、全球气候改变及其影响、植被改变、水体污染、大气污染等有利于人们了解环境改变,使环境得到爱护和改善灾难监测旱情、洪灾、滑坡、泥石流、地震、农林病虫害、森林火灾等有利于防灾减灾2.遥感技术的应用(1)资源调查;(2)环境监测;(3)自然灾难防卫、监测;(4)农业方面(见下图)。
二、全球定位系统的应用1.全球定位系统的应用依据全球定位系统所具有的特征,其广泛应用于以下领域:2.任何时间、任何地点都能观测到4颗以上的卫星,并不意味着卫星定位必需运用4颗以上的卫星。
依据3颗卫星供应的材料,运用数学原理就可以计算出地面静止物体的位置。
有4颗卫星供应材料,除可进一步提高定位的精确度外,还可以快速计算出运动物体的空间位置。
因此,运用3颗卫星就可以粗略定位了。
三、地理信息系统的应用1.在区域地理环境探讨中的应用2.在城市管理中的应用应用主要功能城市信息管理与服务主要向城市居民供应日常工作与生活所需的各种信息城市规划进行城市与区域多目标的开发和规划城市道路交通管理显示有关道路的路况、交通流量、沿线环境等空间和属性信息城市抗灾减灾实时跟踪灾难发生、发展过程,对灾难进行快速分析、评价和模拟,协助开展灾后的应急和复原工作城市环境管理环境规划与决策、监测、评价、预料与模拟1.“3S”技术的区分项目遥感(RS) 全球定位系统(GPS) 地理信息系统(GIS)功能获得信息定位、导航对获得的信息进行综合分析、加工、模拟特点探测范围大、速度快、限制小、信息量大等全天候、连续性、实时性图形化、可视化、更新快、内容更丰富敏捷等应用资源普查、灾难监测、环境监测、工程建设及规划、军事侦察、海上交通、海上渔业等广泛应用于军事、航空、航海等高科技领域,并拓展到交通、探险等领域广泛应用于测绘、资源管理、环境爱护、灾难监测、城乡规划、市场分析等领域,其中城市管理是应用最早的领域之一举例资源调查,环境监测,自然灾难防卫、监测,农业土地资源及利用现状调查,农作物长势监测在野外调查时确定考察点的地理位置和高程,为飞机、轮船和汽车导航对区域内各种条件进行精确分析、评价,对环境和自然灾难进行动态监测和评估预料2.“3S”技术的联系3.RS和GIS在自然灾难监测中的作用项目在自然灾难监测中的作用RS ①监测灾难性天气,如台风、暴雨、沙尘暴等②监测突发性灾难,如森林火灾、赤潮等③监测人难以到达区域的灾难④监测灾难发生的规模、速度以及是否复发GIS ①对自然灾难进行预报预警、动态监测、成因与规律分析、损失调查、灾情评估等②为制定减灾预案和指导灾后重建工作供应依据RS和GIS结合①灾前:圈定危急区,对危急程度作出评价,指导防灾活动②灾中:实况监测并指导抗灾活动③灾后:评价损失,指导救灾活动1.“点”与“面”推断GPS,GPS的主要功能是定位和导航。
最值模型-瓜豆原理(解析版)--中考数学常见几何模型全归纳之模型解读
最值模型-瓜豆原理动点轨迹问题是中考的重要题型,受学生解析几何知识的局限和思维能力的束缚,该压轴点往往成为学生在中考中的一个坎,致使该压轴点成为学生在中考中失分的集中点。
掌握该压轴题型的基本图形,构建问题解决的一般思路,是中考专题复习的一个重要途径。
本专题就最值模型中的瓜豆原理(动点轨迹基本类型为直线型和圆弧型)进行梳理及对应试题分析,方便掌握。
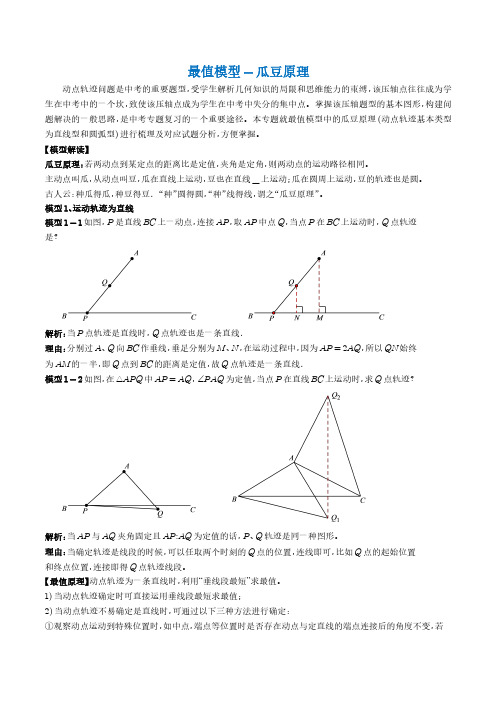
【模型解读】瓜豆原理:若两动点到某定点的距离比是定值,夹角是定角,则两动点的运动路径相同。
主动点叫瓜,从动点叫豆,瓜在直线上运动,豆也在直线_上运动;瓜在圆周上运动,豆的轨迹也是圆。
古人云:种瓜得瓜,种豆得豆.“种”圆得圆,“种”线得线,谓之“瓜豆原理”。
模型1、运动轨迹为直线模型1-1如图,P是直线BC上一动点,连接AP,取AP中点Q,当点P在BC上运动时,Q点轨迹是?解析:当P点轨迹是直线时,Q点轨迹也是一条直线.理由:分别过A、Q向BC作垂线,垂足分别为M、N,在运动过程中,因为AP=2AQ,所以QN始终为AM的一半,即Q点到BC的距离是定值,故Q点轨迹是一条直线.模型1-2如图,在△APQ中AP=AQ,∠PAQ为定值,当点P在直线BC上运动时,求Q点轨迹?解析:当AP与AQ夹角固定且AP:AQ为定值的话,P、Q轨迹是同一种图形。
理由:当确定轨迹是线段的时候,可以任取两个时刻的Q点的位置,连线即可,比如Q点的起始位置和终点位置,连接即得Q点轨迹线段。
【最值原理】动点轨迹为一条直线时,利用“垂线段最短”求最值。
1)当动点轨迹确定时可直接运用垂线段最短求最值;2)当动点轨迹不易确定是直线时,可通过以下三种方法进行确定:①观察动点运动到特殊位置时,如中点,端点等位置时是否存在动点与定直线的端点连接后的角度不变,若存在该动点的轨迹为直线;②当某动点到某条直线的距离不变时,该动点的轨迹为直线;③当一个点的坐标以某个字母的代数式表示时,若可化为一次函数,则点的轨迹为直线;④若动点轨迹用上述方法都合适,则可以将所求线段转化为其他已知轨迹的线段求值。
2015年注册测绘师资格考试测绘综合能力真题与解析
2015年注册测绘师资格考试测绘管理与法律法规真题试卷一、单项选择题(共80题,每题1分,每题的备备选项中,只有1个最符合题意)。
1.LCR-G型相对重力仪必须锁摆的状态是()。
A.运输过程中B.仪器检查C.观测读数D.静置2.三角高程垂直角观测的最佳时间段为()。
A.日出前后B.日落前后C.上午10点至11点D.中午前后3.海拔高的起算面是()。
A.参考椭球面B.平均大潮高潮面C.大地水准面D.理论最低潮面4.按照国家秘密目录,国家等级控制点坐标成果的密级是()。
A.绝密B.机密C.秘密D.内部使用5.下列关于我国高程基准与深度基准关系的说法中,正确的是()。
A.二者是两个不同的大地水准面B.二者是同一个大地水准面C.二者是两个不平行的空间曲面D.二者是是两个不平行且相差一个常数的平面M≤±1.0mm/km,按照我国水准仪系列标准规定,该6.某水准仪标称精度为偶然中误差,仪器的型号是()。
A.S05B.S1C.S3D.S107.为有效抑制多路径效应的影响,GNSS基准站接收机天线应具备的特性或特定设备是()。
A.抗电磁干扰能力B.指北标志C.天线保护罩D.扼流圈8.下列功效中,能够借助GPS接收机同步观测来实现的是()。
A.解算转换系数B.提高工作效率C.提高仪器对中精度D.消弱卫星星历误差9.水准测量中,使用光学水准仪往测时,偶数测站照准标尺的顺序为()。
A.前后后前B.后前前后C.前后前后D.后前后前10.GPS点位选择时,要求附近不应有强烈反射卫星信号的物体,主要目的是控制()。
A.天线相位中心不正确误差B.电离层传播误差C.旁折光影响D.多路径效应11.一等三角点测量中,要求日夜观测时段数要符合一定的比例,其主要目的是消弱()。
A.旁折光影响B.望远镜照准误差C.水平度盘的刻划误差D.归零差12.沿附和水准路线测定P点高程如下图所示,观测结果如下表,则P点高程的最或然值是()m。
中考物理专项训练:人类探究微观世界的历程(含解析)
人类探究微观世界的历程一.选择题(共16小题)1.(2015•济宁)人类对原子结构的认识经历了一个相当长的时期.以下是科学家及提出的原子结构假设模型(如图所示),其中符合原子结构模型建立先后顺序的是()A.①→②→③B.③→②→①C.①→③→②D.③→①→②2.(2015•南京)小明在学习“从粒子到宇宙”的知识后,有下列认识,其中正确的是()A.扫地时灰尘飞舞能说明分子在做无规则运动B.海绵容易被压缩能说明分子间有空隙C.在探索比分子更小的微观粒子的历程中,人们首先发现了质子D.宇宙是一个有层次的天体结构系统,它是有起源的、膨胀的和演化的3.(2015•南京二模)关于粒子和宇宙,下列认识正确的是()A.质子带正电荷,中子不带电B.雾霾是由于固体分子不停运动形成的C.地球等行星围绕太阳转动,太阳是宇宙的中心D.炭笔画出的连续的线放大后不连续,说明分子间有空隙4.(2015•黄浦区一模)下列原子模型按照建立的先后顺序排列正确的是()A.①②③B.③②①C.②①③D.③①②5.(2015春•南京期中)面对宇宙万物,人们从没有停止过探究,下列说法中正确反映人类探究结果的是()A.原子结构与太阳系很相似,质子、中子和电子就像行星绕太阳运动一样在绕核运动B.质子和中子不可以再分C.在天文学中,用“光年”作为距离的单位D.原子核是由电子、质子和中子组成的6.关于粒子和宇宙,下列表述中正确的是()A.宇宙是一个有层次的天体结构系统,恒星是绝对不动的B.摩擦起电的实质是电子从一个物体转移到另一个物体C.在微观粒子中,空间尺度从大到小的排列是:电子、原子核、原子、分子D.固体、液体很难被压缩是因为分子间存在引力7.人类对于宇宙的探索是在一次次挫折中不断向前发展的,比如俄罗斯“福布斯﹣﹣土壤”火星探测器在地球近地轨道上因主发动机启动失败而无法变轨.经查,是太空中的带电粒子对机载计算机系统产生影响导致程序出错.下列粒子中,首先可以排除对计算机系统产生影响的粒子是()A.电子B.质子C.中子D.氦核8.下列说法中正确的是()A.谱线“红移”现象说明星系在逐渐靠近我们B.在天文学中,用“光年”作为时间单位C.原子是由原子核和核外电子组成的D.太阳是宇宙的中心,地球是太阳的一颗行星9.关于粒子和宇宙的说法正确的是()A.汤姆生发现电子说明原子是可分的,电子带的负电荷数与质子带的正电荷数相等时,物体对外不显电性B.扫地时尘土飞扬说明分子在永不停息地做无规则运动C.运动场用的塑胶跑道比一般跑到好,这是因为塑胶跑道延展性好D.把10毫升酒精和10毫升水混合在一起,体积等于20毫升10.关于粒子和宇宙,下列认识中正确的是()A.物理学家汤姆孙发现电子从而揭示了原子是有结构的B.闻气味能鉴别醋和酱油是因为分子间有相互作用力C.宇宙是由物质组成的,恒星是绝对不动的D.将两块表面平滑的铅块压紧后,它们会粘在一起是因为分子在运动11.关于宇宙与微观世界,以下说法正确的是()A.宇宙的广阔无垠,常以“纳米”作长度单位进行量度B.对微观世界的认识中,已经发现比质子、中子更小更精细的结构C.一般分子的大小,常以“光年”做单位进行量度D.物质从固态变成液态,再由液态变成气态的过程中,体积保持不变12.下列有关宇宙的说法正确的是()A.我们人类居住的地球是宇宙的中心B.宇宙是由许许多多个星系组成的C.宇宙中各个物体都是静止的D.宇宙中像地球一样的天体是由物质组成的,像太阳一样的天体不是由物质组成的13.关于大宇宙和小粒子,下列说法正确的是()A.宇宙和粒子的尺度由大到小的排列是:太阳系、银河系、地球、分子、质子B.原子核式结构模型的实验基础是α粒子散射实验C.原子核由质子和电子组成D.目前,世界上已经利用核聚变原理建成了许多核电站14.下列对于微观世界的描述中,错误的是()A.地球是由物质组成的B.分子是组成物质的微粒C.分子是微观世界中最小的微粒D.分子是组成物质且保持其化学性质不变的微粒15.下面对宇宙和微观世界的描述中,不正确的是()A.地球是由物质组成的B.分子是微观世界中的最小微粒C.物质是由分子组成的D.物质处于不停的运动中16.下列关于微粒和宇宙,说法错误的是()A.物质是由大量微粒组成的B.宇宙是一个有层次的天体系统C.汤姆生发现了中子,从而揭示了原子是可分的D.分子运动是无规则的,天体运动是有规律的二.填空题(共4小题)17.在探索微观世界的过程中,首先发现了电子,进而认识到原子是有结构的,科学家对原子的结构进行猜想和实验,并提出了多种模型.在如图所示的两种模型中是卢瑟福提出的原子核式模型,进而认识到原子是由带正电的和带负的组成的.18.在探索微小粒子的历程中,人们首先发现了电子,进而认识到(选填“原子”或“原子核”)是可分的.后来又发现原子核是由和构成的.20世纪60年代,科学家又提出组成原子核的这两种粒子都是由被称为的更小微粒构成的.19.为了揭示大自然的奥秘,无数科学家进行了不懈的探索.汤姆生发现了电子,从而揭示了原子是可以的;卢瑟福通过大量实验和科学推理建立了原子结构的模型;组成大自然的天体和微观粒子都在不停地;整个宇宙是由各种各样的物质组成的.20.人们无法凭肉眼看到物质内部的微小结构,对此,科学家们想出的有效方法是根据的现象提出一种的猜想,再来证实自己的猜想,从而弄清物质的内部结构.人类探究微观世界的历程一.选择题(共16小题)1.(2015•济宁)人类对原子结构的认识经历了一个相当长的时期.以下是科学家及提出的原子结构假设模型(如图所示),其中符合原子结构模型建立先后顺序的是()A.①→②→③B.③→②→①C.①→③→②D.③→①→②考点:人类探究微观世界的历程.专题:粒子与宇宙、材料世界.分析:①1803年,英国科学家道尔顿提出了原子论;②1911年卢瑟福提出原子结构行星模型;③1904年汤姆生提出的葡萄干面包原子模型;④1913年玻尔提出轨道式原子模型.解答:解:1803年,英国科学家道尔顿提出了原子论;1904年汤姆生提出的葡萄干面包原子模型;1911年卢瑟福提出原子结构行星模型;1913年玻尔提出轨道式原子模型.则顺序为③①②.故选D.点评:本题考查了原子的结构和化学史,难度不大,注意基础知识的积累.2.(2015•南京)小明在学习“从粒子到宇宙”的知识后,有下列认识,其中正确的是()A.扫地时灰尘飞舞能说明分子在做无规则运动B.海绵容易被压缩能说明分子间有空隙C.在探索比分子更小的微观粒子的历程中,人们首先发现了质子D.宇宙是一个有层次的天体结构系统,它是有起源的、膨胀的和演化的考点:人类探究微观世界的历程;人类探究太阳系及宇宙的历程.专题:粒子与宇宙、材料世界.分析:解答本题应掌握:(1)扩散现象是分子运动的结果;(2)海绵是多孔结构的物质.(3)汤姆生发现电子后,人们认识到原子是由位于原子中央的原子核和核外电子组成,原子核是由带正电的质子与不带电在质子组成.(4)宇宙是有层次的天体系统,它的层次结构:行星﹣﹣太阳系﹣﹣银河系﹣﹣星系团﹣﹣超星系团﹣﹣总星系.解答:解:A、灰尘在空中飞扬,那是物质的机械运动,不是分子在运动,分子运动是肉眼看不见的.故A错误;B、海绵能够被压缩,是因为海绵的多孔结构.故B错误;C、在探索微小粒子的历程中人们首先发现了电子.故C错误;D、宇宙是由物质组成的,宇宙中有很多的星系,星系中又有很多星体,宇宙是一个有层次的天体结构系,并且处于不断的演化过程中.故D正确.故选D.点评:本题考查了分子动理论、扩散现象、原子结构、宇宙结构等,所考查内容均为物理中的常见知识点,要求学生熟练掌握.3.(2015•南京二模)关于粒子和宇宙,下列认识正确的是()A.质子带正电荷,中子不带电B.雾霾是由于固体分子不停运动形成的C.地球等行星围绕太阳转动,太阳是宇宙的中心D.炭笔画出的连续的线放大后不连续,说明分子间有空隙考点:人类探究微观世界的历程;人类探究太阳系及宇宙的历程.专题:粒子与宇宙、材料世界.分析:(1)分子由原子组成,原子的构成:带正电的原子核和带负电的核外电子,原子核又分为带正电的质子和不带电的中子;(2)雾霾是空气中的水蒸气液化成的小水滴与空气中灰尘结合形成的,是可见的物质体;(3)宇宙有层次之分,是由无数天体组成,太阳是宇宙中的一颗行星,不是宇宙的中心;(4)分子是肉眼看不到的.解答:解:A、原子由原子核和核外电子组成,原子核包括质子和中子两部分.质子带正电荷,中子不带电.此选项正确;B、雾霾是空气中的水蒸气液化成的小水滴与空气中灰尘结合形成的,是可见的物质,不是分子.此选项错误;C、地球等行星绕太阳转动,太阳是太阳系的中心,不是宇宙的中心.此选项错误;D、炭笔画出的线之间的空隙可以用肉眼看到,所以不是分子,不能说明分子间有间隙.此选项错误.故选A.点评:解答本题的关键是了解宇宙的知识和分子动理论的知识.4.(2015•黄浦区一模)下列原子模型按照建立的先后顺序排列正确的是()A.①②③B.③②①C.②①③D.③①②考点:人类探究微观世界的历程.专题:粒子与宇宙、材料世界.分析:汤姆生发现电子后,最早提出了葡萄干蛋糕模型,卢瑟福在α粒子散射实验的基础上提出了原子行星模型,现在科学家认为电子云模型更符合实际.解答:解:三种模型依次为②葡萄干蛋糕模型、①行星模型、③电子云模型,现在科学家普遍认为电子云模型能更好地解释我们观察到的有关电子的现象.故选C.点评:本题考查原子模型的发现历程,人类认识事务总是要循序渐进的,不可能一下子就得出正确的结论.5.(2015春•南京期中)面对宇宙万物,人们从没有停止过探究,下列说法中正确反映人类探究结果的是()A.原子结构与太阳系很相似,质子、中子和电子就像行星绕太阳运动一样在绕核运动B.质子和中子不可以再分C.在天文学中,用“光年”作为距离的单位D.原子核是由电子、质子和中子组成的考点:人类探究微观世界的历程;人类探究太阳系及宇宙的历程.专题:粒子与宇宙、材料世界.分析:(1)原子结构与太阳系很相似,电子就像行星绕太阳运动一样在绕中子运动;(2)质子和中子由夸克组成;(3)光年是指光在一年中传播的距离;(4)原子核由质子和中子组成.解答:解:A、原子结构与太阳系相似,原子核集中了所有正电荷及大部分质量,即原子核由带正电的质子及不带电的中子组成,质子和中子还可以再分为更小的粒子,电子绕核运动,而质子和中子不做绕核运动,故A不正确;B、质子和中子都可再分为更小的粒子夸克,故B不正确;C、在天文学中,用“光年”作为长度单位,故C正确;D、原子核是由质子和中子组成的,故D不正确.故选C.点评:本题考查宏观的宇宙及微观的原子,天体的运动及微观粒子的运动有很多相似之处,属于基础知识的考查.6.关于粒子和宇宙,下列表述中正确的是()A.宇宙是一个有层次的天体结构系统,恒星是绝对不动的B.摩擦起电的实质是电子从一个物体转移到另一个物体C.在微观粒子中,空间尺度从大到小的排列是:电子、原子核、原子、分子D.固体、液体很难被压缩是因为分子间存在引力考点:人类探究微观世界的历程;人类探究太阳系及宇宙的历程.专题:粒子与宇宙、材料世界.分析:根据对微观与宏观世界的了解,结合所学知识可逐一对选项中的描述做出判断.解答:解:A、宇宙是一个有层次的天体结构系统,所有星体都在运动,恒星也不是绝对不动的,故A说法错误;B、摩擦起电的实质是电子从一个物体转移到另一个物体,从而使两物体带上不同的电荷,故B说法正确;C、在微观粒子中,空间尺度从小到大的排列是:电子、原子核、原子、分子,选项中的说法搞反了,故C说法错误;D、固体、液体很难被压缩是因为分子间存在斥力,而不是引力,故D说法错误.故选B.点评:本题考查的知识点较多,主要是围绕微观与宏观世界的了解,对粒子与宇宙的认识等,属基础知识.7.人类对于宇宙的探索是在一次次挫折中不断向前发展的,比如俄罗斯“福布斯﹣﹣土壤”火星探测器在地球近地轨道上因主发动机启动失败而无法变轨.经查,是太空中的带电粒子对机载计算机系统产生影响导致程序出错.下列粒子中,首先可以排除对计算机系统产生影响的粒子是()A.电子B.质子C.中子D.氦核考点:人类探究微观世界的历程.专题:粒子与宇宙、材料世界.分析:根据原子由原子核和核外电子构成,其中原子核由质子和中子构成的;在原子中,质子带正电,电子带负电,原子核带正电;中子不带电.进行分析解答本题.解答:解:在原子中,质子带正电,电子带负电,原子核带正电是由于质子带正电,而中子不带电.故选C.点评:本题考查了原子内各种微粒的电性,要记住.8.下列说法中正确的是()A.谱线“红移”现象说明星系在逐渐靠近我们B.在天文学中,用“光年”作为时间单位C.原子是由原子核和核外电子组成的D.太阳是宇宙的中心,地球是太阳的一颗行星考点:人类探究微观世界的历程.专题:粒子与宇宙、材料世界.分析:(1)谱线红移现象说明了光谱向长波方向偏移,则由波速、波长和频率的关系可知光波的频率变化;此现象说明星系在远离我们而去;(2)光年是光在一年内所走的路程;(3)原子是由原子核及核外绕核转动的电子组成;(4)宇宙是由大量天体组成的,银河系只是其中一部分,而太阳只是银河系中的一颗恒星.解答:解:A.谱线“红移”说明了星系在远离我们,从而证实了宇宙大爆炸理论,故A 不正确;B.光年是光在一年内所走的路程,所以光年是路程单位,而不是时间单位,故B不正确;C.原子是由位于中心的原子核及核外转动的电子组成的,故C正确;D.太阳只是宇宙中众多的恒星之一,不是宇宙的中心,地球是太阳八大行星之一,故D不正确.故选C.点评:本题考查原子结构、光年、宇宙的组成及谱线红移等,其中光年很多学生易记成时间单位.9.关于粒子和宇宙的说法正确的是()A.汤姆生发现电子说明原子是可分的,电子带的负电荷数与质子带的正电荷数相等时,物体对外不显电性B.扫地时尘土飞扬说明分子在永不停息地做无规则运动C.运动场用的塑胶跑道比一般跑到好,这是因为塑胶跑道延展性好D.把10毫升酒精和10毫升水混合在一起,体积等于20毫升考点:人类探究微观世界的历程;分子动理论的基本观点;分子的运动.专题:分子热运动、内能.分析:A、电子是汤姆生发现的,从而揭示了原子的结构;B、要区分开分子的运动和固体小颗粒的运动;C、运动场上选择使用塑胶跑道抓要是考虑到它的弹性和硬度;D、构成物体的分子并不是非常紧密的排列在一起的,分子之间有间隙.解答:解:A、汤姆生发现了电子,从而说明了原子是可以再分的,电子带的负电荷数与质子带的正电荷数相等时,物体对外不显电性.选项正确;B、尘土飞扬是固体小颗粒的运动,不是分子的运动.选项错误;C、塑胶跑道比一般跑道弹性好,硬度低.选项错误;D、把10毫升酒精和10毫升水混合在一起,由于分子之间有间隙,总体积小于20毫升.选项错误.故选A.点评:此题考查有关分子的知识,是一道基础题.10.关于粒子和宇宙,下列认识中正确的是()A.物理学家汤姆孙发现电子从而揭示了原子是有结构的B.闻气味能鉴别醋和酱油是因为分子间有相互作用力C.宇宙是由物质组成的,恒星是绝对不动的D.将两块表面平滑的铅块压紧后,它们会粘在一起是因为分子在运动考点:人类探究微观世界的历程;人类探究太阳系及宇宙的历程.专题:粒子与宇宙、材料世界.分析:(1)汤姆生发现了电子从而揭示了原子是有结构的;(2)我们能够闻到醋和酱油的气味是因为醋和酱油分子扩散到空气中,扩散现象说明了构成物体的分子在不停的做无规则运动;(3)运动是相对而言的,没有任何物体是绝对不动的;(4)分子间具有引力,所以两铅块压紧后能够粘在一起.解答:解:A、物理学家汤姆生发现了电子从而揭示了原子是有结构的,故A正确;B、鼻子可以闻到醋和酱油的气味,是因为醋和酱油分子运动到了空气中,故B错误;C、运动是相对而言的,没有任何物体是绝对不动的,选择了不同的参照物,物体的运动情况就是不同的,恒星相对于从它旁边运动过的流星而言就是运动的,故C错误;D、两块平滑的铅块压紧后,由于分子间有相互的引力,从而将铅块吸附在一起,故D错误;故选A.点评:本题考查内容有:分子动理论、人类对宇宙的认识、原子结构等,以上内容要求学生熟记.11.关于宇宙与微观世界,以下说法正确的是()A.宇宙的广阔无垠,常以“纳米”作长度单位进行量度B.对微观世界的认识中,已经发现比质子、中子更小更精细的结构C.一般分子的大小,常以“光年”做单位进行量度D.物质从固态变成液态,再由液态变成气态的过程中,体积保持不变考点:人类探究微观世界的历程.专题:粒子与宇宙、材料世界.分析:(1)纳米是一种长度单位,1纳米=10﹣9米;(2)原子核是由质子和中子组成的,质子和中子又是由更小的离子﹣﹣夸克组成的;(3)光年是指光在一年中传播的距离,是长度单位,1光年=365×24×3600s×3×108m/s=9.4608×1015m;(4)物质在发生状态变化时,体积会发生变化,多数物质从液态变为固态时体积变小,液态变为气态时体积变大.解答:解:A、宇宙的广阔无垠,常以“光年”作长度单位进行量度,该选项说法不正确;B、微观世界的认识中,已经发现比质子、中子更小更精细的结构﹣﹣夸克,该选项说法正确;C、一般分子的大小,常以“纳米”做单位进行量度,该选项说法不正确;D、物质从固态变成液态,再由液态变成气态的过程中,体积变大,该选项说法不正确.故选B.点评:(1)纳米和光年都是长度的单位,纳米是最小的长度单位,光年是最大的长度单位;(2)物质的三种状态是由物质内部的分子排列方式所决定的,分子排列方式也决定了体积的大小.12.下列有关宇宙的说法正确的是()A.我们人类居住的地球是宇宙的中心B.宇宙是由许许多多个星系组成的C.宇宙中各个物体都是静止的D.宇宙中像地球一样的天体是由物质组成的,像太阳一样的天体不是由物质组成的考点:人类探究微观世界的历程.专题:粒子与宇宙、材料世界.分析:①地球是太阳系中一颗普通的行星,宇宙是无限的,没有中心;②宇宙最大的单位是星系团,星系团由具体的星系组成;星系由恒星系组成,恒星系普遍是双星系统,一部分恒星系有行星系统,一部分行星系统有卫星,无论哪级天体系统,都是由具体的物质组成;③宇宙万物处于不断的运动和变化之中,绝对静止的物体不存在.解答:解:A、宇宙是无限的,地球只不过是宇宙中普通的一颗行星,并不是宇宙的中心.此选项错误;B、宇宙由银河系等无数的星系组成.此选项正确;C、运动是物体存在的基本形式,宇宙由运动的物质组成,所以宇宙中各个物体都处于不断的运动和变化过程中.此选项错误;D、宇宙中的天体或星云,都是由具体的物质组成的,只是规模、种类、密度不同.此选项错误.故选B.点评:此题考查的是对天文常识的了解,在平时的学习和生活中应该注意积累.13.关于大宇宙和小粒子,下列说法正确的是()A.宇宙和粒子的尺度由大到小的排列是:太阳系、银河系、地球、分子、质子B.原子核式结构模型的实验基础是α粒子散射实验C.原子核由质子和电子组成D.目前,世界上已经利用核聚变原理建成了许多核电站考点:人类探究微观世界的历程.专题:粒子与宇宙、材料世界.分析:(1)宇宙由很多星系组成,银河系是其中的一个星系,太阳系又是银河系中的一个星系,地球处在太阳系中,月球是地球的卫星,分子、质子是非常小的微粒;(2)α粒子散射实验说明了原子的核式结构模型;(3)原子是由位于原子中心的原子核和核外电子组成的;(4)现在世界上的核电站都是利用核裂变发电的.解答:解:A、按空间尺度由大到小排列:银河系、太阳系、地球、分子、质子,所以A不正确;B、原子核式结构模型的实验基础是α粒子散射实验,所以B正确;C、原子是由位于原子中心的原子核和核外电子组成的,原子核又是由带正电的质子和不带电的中子组成的,所以C不正确;D、核电站是利用核裂变释放的能量发电的,所以D不正确.故选B.点评:本题考查知识点较多,都是基础知识,要注意对基础知识的掌握和积累.14.下列对于微观世界的描述中,错误的是()A.地球是由物质组成的B.分子是组成物质的微粒C.分子是微观世界中最小的微粒D.分子是组成物质且保持其化学性质不变的微粒考点:人类探究微观世界的历程;从微观到宏观的尺度.专题:粒子与宇宙、材料世界.分析:(1)宇宙是由物质组成的,物质是由分子组成的;(2)分子是组成物质且保持其化学性质不变的最小微粒,但不是微观世界中的最小微粒.解答:解:A、地球是由物质组成的,正确;B、物质是由分子组成的,分子是组成物质的微粒,正确;C、分子是组成物质的微粒,但不是微观世界中的最小微粒,故C错误;D、分子是组成物质且保持其化学性质不变的最小微粒,正确.故选C点评:此题考查了学生对微观世界的认识和了解,知道分子是组成物质且保持其化学性质不变的最小微粒,但不是微观世界中最小的微粒,这是解决此题的关键.。
高考化学真题分项汇编(全国通用)STSE 传统文化 化学用语(解析版)
D.TiCl4加入水中:TiCl4+(x+2)H2O=TiO2·xH2O↓+4H++4Cl-
【答案】B
【解析】A.碱性锌锰电池放电时正极得到电子生成MnO(OH),电极方程式为MnO2+H2O+e-=MnO(OH)+OH-,A正确;
D.Fe2O3为红色,常被用于油漆、涂料、油墨和橡胶的红色颜料,俗称铁红,D正确;
故答案选C。
考点四化学用语
5.(2023·辽宁卷)下列化学用语或表述正确的是
A.BeCl2的空间结构:V形B.P4中的共价键类型:非极性键
C.基态Ni原子价电子排布式:3d10D.顺—2—丁烯的结构简式:
【答案】B
【解析】A.BeCl2的中心原子为Be,根据VSEPR模型可以计算,BeCl2中不含有孤电子对,因此BeCl2为直线型分子,A错误;
B.铅酸电池在充电时阳极失电子,其电极式为:PbSO4-2e-+2H2O=PbO2+4H++SO ,B错误;
C.K3[Fe(CN)6]用来鉴别Fe2+生成滕氏蓝沉淀,反应的离子方程式为K++Fe2++[Fe(CN)6]3-=KFe[Fe(CN)6]↓,C正确;
D.TiCl4容易与水反应发生水解,反应的离子方程式为TiCl4+(x+2)H2O=TiO2·xH2O↓+4H++4Cl-,D正确;
A.我国科学家实现了从二氧化碳到淀粉的人工合成,淀粉是一种单糖
中考物理 专题复习与命题猜想《粒子与宇宙》(含解析)(2021-2022学年)
《粒子与宇宙》一、单选题:1.利用气球进行如图所示的各种实验,下列相关解释中错误的是()A.甲图:与羊毛衫摩擦过的气球会吸引头发—-说明气球摩擦后带电B.乙图:气球因向后喷气而前行--说明力是维持物体运动的原因ﻫC。
丙图:对气球充气,球面上的小圆点距离增大——可模拟宇宙膨胀现象ﻫD。
丁图:气球左右边的形变不同--说明压力的作用效果与受力面积有关2。
下列原子模型按照建立的先后顺序排列正确的是( )ﻫA。
①②③ B.③②①C。
②①③D。
③①②3.人类对原子结构的认识经历了一个相当长的时期.以下是科学家及提出的原子结构假设模型(如图所示),其中符合原子结构模型建立先后顺序的是( )ﻫ A.①→②→③B。
③→②→①C.①→③→② D.③→①→②4.2016年3月3日,物理学家杰拉德•杰克逊和史蒂芬•霍维试图就反物质湮灭释放巨大的能量来制造宇宙飞船的推进器.反物质是由反粒子构成的,反质子、正电子都属于反粒子,它们分别与质子、电子的质量、电量相等,但电性相反.那么,根据你的理解,如图关于反氢原子的结构示意图,正确的是( )ﻫA。
B。
C。
D.5.如图:下列说法中正确是( )ﻫA。
甲图中分子在不停的做无规则运动,乙图中分子静止ﻫB。
甲图表示的是气体分子排列情况、丙图表示的是固体分子排列情况C。
乙图中分子间距离比甲图中分子间距离小、分子间作用力也比甲图中分子间作用力小ﻬD。
若某种物质分子排列情况通过某一个过程由乙图变为丙图,忽略其它因素,则该物质的内能增大了6.“从粒子到宇宙”的知识后,有下列认识,其中正确的是()A.扫地时灰尘飞舞能说明分子在做无规则运动B。
碎玻璃不能拼在一起是由于分子间有斥力C。
在探索比分子更小的微观粒子的历程中,人们首先发现了质子ﻫD.宇宙是一个有层次的天体结构系统,它是有起源的、膨胀的和演化的7。
PM2。
5是指大气中直径小于或等于25μm的颗粒物,是造成雾霾天气的主要原因,它和电子、原子核、分子等粒子一起按照空间尺度由大到小排序,正确的是()A.PM2.5、分子、原子核、电子 B.分子、PM2。
高考化学:学考试卷解析
选考第1题物质分类1.知识考点出处:必修一P3 图1-22.难度:很简单3.设问:氧化物(酸性和碱性)盐酸碱二知识梳理1.氧化物:由两种元素组成,其中一种是氧元素(1)分类:化学性质①酸性氧化物:与碱反应生成盐和水(CO2 SO2 SiO2 Na2O )②碱性氧化物:与酸反应生成盐和水(CuO, CaO,MgO 等)③两性氧化物: 都能反应(Al2O3 ZnO 等)④不成盐氧化物:不反应(CO ,NO)⑤过氧化物:Na2O2 H2O2注意:Fe3O4不是碱性氧化物(碱性氧化物是与酸反应生成一种盐)ClO2不是酸性氧化物(酸性氧化物是与碱反应生成一种盐)(2)酸酐:含氧酸脱去水后剩下的氧化物(中心元素化合价不变)H2SO4→SO3HNO3→N2O5H2SiO3→SiO2HNO2→N2O3HClO →Cl2O注:并不是所有的酸酐都能与水反应生成对应的碱(SiO2)2.酸:电离时生成的阳离子是H+的化合物注:(1)HClO4是目前酸性最强的(2)HClO是弱酸但氧化性很强3.碱:电离时生成的阴离子是OH-的化合物4.盐:电离时生成金属阳离子(NH4+)和酸根离子化合物(1)分类(组成)①正盐:NaCl Na2SO4 CaCO3单盐②酸式盐:NaHCO3 N a H S O4 NaHS③碱式盐:C u2(O H)2C O3 Cu2(OH)2SO4 等①复盐:由两种或两种以上阳离子和一种阴离子组成的盐。
如KAl(SO4)2·12H2O,(NH4)2Fe(SO4)2·6H2O(化学1P68)合盐②混盐:由两种或两种以上阴离子和一种阳离子组成的盐。
如CaCl(ClO),Ca(NO3)Cl③络盐: 含有络离子的盐。
由一个简单阳离子和几个中性分子或其它离子结合而成的复杂离子叫做络离子。
如[Cu(NH3)4]SO4(实验化学P7),K4[Fe(CN)6](实验化学P11),Fe(SCN)3(化学1P75)选考第2题常见仪器识别1.知识点出处:必修一和必修二中基本实验的基本仪器2.难度:很简单3.设问:(1)下列的仪器名称为“xxx”的是:(真题)(2)下列仪器名称正确的是:(练习第3.6)二.知识梳理1.配溶液:容量瓶,烧杯,玻璃棒,胶头滴管,量筒(必修一P23)2.物质分离与提纯:(必修一P18)(1)过滤:漏斗,保温漏斗(2)分液:分液漏斗(3)抽滤:布氏漏斗(4)蒸馏:蒸馏烧瓶(有支管),冷凝管(5)固体研成粉末:研钵(6)蒸发结晶:蒸发皿(7)固体高温分解:海带烧成灰:坩埚或蒸发皿(8)添加溶液:长颈漏斗,恒压滴液漏斗3.其他(练习第3.4)坩埚钳,镊子,泥三角,锥形瓶,三角架,干燥器,球形干燥管,试管夹圆底烧瓶试管容量瓶烧杯分液漏斗量筒研钵蒸馏烧瓶冷凝管玻璃棒干燥器泥三角硬质玻璃管坩埚钳洗气瓶漏斗坩埚蒸发皿分液漏斗长颈漏斗球形干燥管锥形瓶胶头滴管铁架台镊子试管夹集气瓶恒压滴液漏斗三颈烧瓶接液管三脚架温度计移液管酸式滴定管碱式滴定管洗耳球蒸馏头选考第3题.电解质与非电解质判断1.知识点出处:必修一P15必修一P53:强.弱电解质2.难度:简单3.设问:电解质,非电解质,强电解质,弱电解质二.知识梳理1.电解质:在水溶液中或熔融状态下能产生本身离子的化合物(1)常见电解质:酸,碱,盐,金属氧化物(2)活泼金属氧化物(Na2O.CaO.K2O等)与水易反应生成氢氧化物,但是在熔融状态电离产生金属离子和氧离子2.非电解质:在水溶液中和熔融状态都不导电的化合物(1)两种条件下均以分子形式存在:葡萄糖,乙醇,蔗糖等有机物注:羧酸和氨基酸是弱电解质(2)NH3和某些酸酐是非电解质(溶于水虽能导电,但不是本身电离出的离子导电)注(1)单质和混合物既不是电解质,也不是非电解质。
专题12 氢原子模型-高考物理模型法之对象模型法(解析版)
模型界定本模型虽题为氢原子模型,但也涉及了原子的各种理论模型,着重处理的是氢原子模型的玻尔理论、能级跃迁等问题。
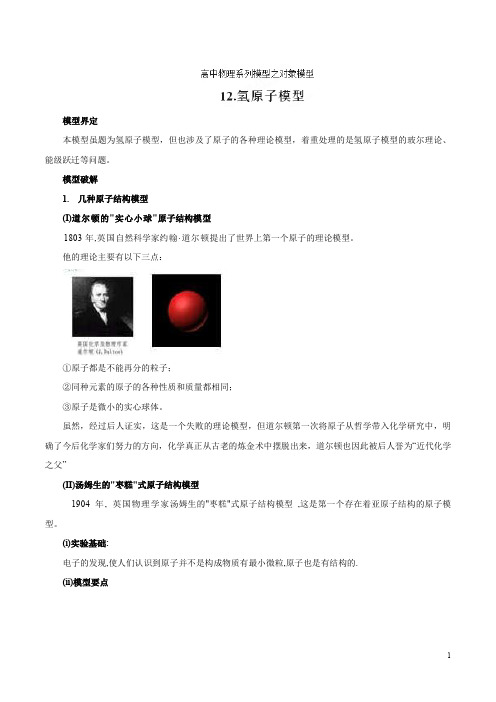
模型破解1.几种原子结构模型(I)道尔顿的"实心小球"原子结构模型1803年,英国自然科学家约翰·道尔顿提出了世界上第一个原子的理论模型。
他的理论主要有以下三点:①原子都是不能再分的粒子;②同种元素的原子的各种性质和质量都相同;③原子是微小的实心球体。
虽然,经过后人证实,这是一个失败的理论模型,但道尔顿第一次将原子从哲学带入化学研究中,明确了今后化学家们努力的方向,化学真正从古老的炼金术中摆脱出来,道尔顿也因此被后人誉为“近代化学之父”(II)汤姆生的"枣糕"式原子结构模型1904年, 英国物理学家汤姆生的"枣糕"式原子结构模型,这是第一个存在着亚原子结构的原子模型。
(i)实验基础:电子的发现,使人们认识到原子并不是构成物质有最小微粒,原子也是有结构的.(ii)模型要点电子是平均的分布在整个原子上的,就如同散布在一个均匀的正电荷的海洋之中,它们的负电荷与那些正电荷相互抵消。
(iii)解决的问题①原子的电中性电子的总电荷量与正电荷总量相同②原子发光电子振动时辐射电磁波,电子振动频率不同辐射的光的频率不同③阴极射线在受到激发时,电子会离开原子,产生阴极射线。
汤姆森的学生卢瑟福完成的α粒子轰击金箔实验(散射实验),否定了这种模型的正确性。
(III)卢瑟福的"行星"式原子结构模型1911年,英国物理学家卢瑟福提出了"行星"式原子结构模型,第一次建立了原子结构的正确图式.(i)实验基础:α粒子散射实验,使人们认识到原子里面有一个很小的核.(ii)模型要点①原子的大部分体积是空的②在原子的中心有一个很小的原子核③原子的全部正电荷在原子核内,且几乎全部质量均集中在原子核内部。
带负电的电子在核空间按照一定轨道进行绕核运动。
专题二 细胞的结构与功能(有解析)——2025届高考生物考点剖析
专题二细胞的结构与功能——高考生物考点剖析精创专题卷考点07 多种多样的细胞(1-6题,21-23题,31题)考点08 细胞膜与细胞核(7-13题,24-26题,32题)考点09 细胞器的结构与功能(14-20题,27-30题,33题)第I卷(选择题)一、单项选择题(本题共20小题,每小题2分,共40分。
在每小题给出的四个选项中,只有一项是最符合题目要求的。
)1.发菜属于蓝细菌,是国家一级重点保护生物。
发菜细胞与其他生物细胞的统一性不包括( )A.细胞膜的基本支架都是磷脂双分子层B.都具有遗传物质特定存在的区域C.都有支持生命活动的生物膜系统D.新细胞都是由老细胞分裂产生的2.如图为几种细胞的结构模式图。
下列关于它们的叙述中正确的是( )A.乙和丁都可以进行有氧呼吸,产生ATPB.肺炎支原体与甲的结构相同,都是具有细胞壁的单细胞原核生物C.乙和丙细胞中都有叶绿体,都可以进行光合作用D.图示四种细胞共有的结构是细胞壁、细胞膜、核糖体3.支原体肺炎由肺炎支原体引起,是一种常见的传染病,支原体模式图如图所示。
下列叙述错误的是( )A.肺炎支原体和根瘤菌相比,没有细胞壁和叶绿体B.肺炎支原体和酵母菌相比,没有成形的细胞核C.肺炎支原体具有细胞结构,HIV不具有细胞结构D.肺炎支原体属于生命系统的细胞层次和个体层次4.2023年9月5日,美国疾病控制与预防中心(CDC)发出警告,提醒医生需密切关注创伤弧菌等致命性食肉菌。
人体被“食肉菌”感染后短时间内就会发展为中毒性休克,多器官功能衰竭甚至死亡。
创伤弧菌生活在温暖的海水中,可通过两种途径感染,一是身体上有伤口,导致其趁虚而入;二是生吃贝类后被感染。
下列相关叙述错误的是( )A. 创伤弧菌是营寄生生活的异养生物B. 创伤弧菌能独立生存,既属于细胞层次又属于个体层次C. 创伤弧菌有细胞壁、细胞膜且遗传物质是DNA,属于真核生物D. 皮肤或口腔有伤口者应避免下海游泳,海鲜务必要煮熟煮透后再食用5.下列关于显微镜的使用,叙述正确的是A.物镜越短,放大倍数越大,视野中观察到的细胞数目越少( )B.高倍镜下观察到细胞质逆时针方向流动,则实际流动方向是顺时针C.在低倍镜下观察清楚后,把要放大观察的物像移至视野中央D.换成高倍物镜后,用粗准焦螺旋调焦并观察6.2023年以来,多地出现了呼吸道合胞病毒(结构模式图如下图所示)感染引发肺炎的病例。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
云的基本定义
设U是一个用精确数值表示的定量论域, T是U空间上的定性概念,若元素x(x∈X)对T的隶属的确 定度CT(x)∈[0,1]是一有稳定倾向的随机数(式F1.1), 则概念T从论域U到区间[0,1]的映射在数域空间的分布, 称为云(Cloud)。
13
这个定义还可以推广到N维云。即若U是N维论域,X∈U, 则N维元素x=(x1,x2,…,xn) (x∈X)对T的隶属的确定度 CT(x)∈[0,1]也是一有稳定倾向的随机数(式F1.1)。由此, 如果在给定论域的数域空间中,x为(xl,x2,…,xn),那 么一个云滴的严格表达,应为一个由自变量的论域空间坐标 及其对概念的确定度的数值对,即:
空间数据挖掘专题
云模型方法
洪金益 中南大学地学院 zxlhong@
1
主要参考文献
• 王树良:基于数据场与云模型的空间数据挖掘和 知识发现,博士论文;
• 邸凯昌 空间数据发掘和知识发现的理论与方法, 博士论文;
• 李德仁、王树良、李德毅:空间数据挖掘理论与 方法,科学出版社,2006.
x2(1,:)=[7.0,6.4,6.9,5.5,6.5,5.7,6.3,4.9,6.6,5.2,5.0,5.9,6.0,6.1,5.6,6.7,5.6,5]; x2(2,:)=[3.2,3.2,3.1,2.3,2.8,2.8,2.3,2.4,2.9,2.7,2.0,3.0,2.2,2.9,2.9,3.1,3.0,2]; x2(3,:)=[4.7,4.5,4.9,4.0,4.6,4.5,4.7,3.3,4.6,3.9,3.5,4.2,4.0,4.7,3.6,4.4,4.5,4]; x2(4,:)=[1.4,1.5,1.5,1.3,1.5,1.3,1.6,1.0,1.3,1.4,1.0,1.5,1.0,1.4,1.3,1.4,1.5,1];
15
这种一个定量数值属于一个定性概念语言的不确定变化,
在每个云滴表现出来时,也许不会剧烈影响到云的整体特征。
即某一个特定的云滴可能无足轻重。但是,一定数量的云滴
的整体分布特性就体现了云映射的模糊性和随机性,也就是
说,云的整体形状反映了在用定量数值表示定性概念时的不
确定特性。例如,“滑坡体向南位移20毫米左右”就是一个
4
Matlab部分云模型程序
逆向云子程序: function [b_Ex,b_En,b_He]=back_cloud(x)
b_Ex=mean(x); b_En=mean(abs(xb_Ex))*sqrt(pi/2); b_He=sqrt(var(x)-b_En^2);
5
经过Matlab处理
6
得ቤተ መጻሕፍቲ ባይዱ的部分结果
7
8
9
10
11
1 云的定义和特性
云是用语言值表示的某个定性概念与其定量 表示之间的不确定性转换模型。它主要反映客观世 界中事物或人类知识中概念的两种不确定性:模糊 性(边界的亦此亦彼性)和随机性(发生的概率),并 把二者完全集成在一起,构成定性和定量相互间的 映射。因为在数域空间中,云既不是一个确定的概 率密度函数,也不是一条明晰的隶属曲线,而是一 朵可伸缩、无边沿、有弹性、近视无边、远观像云 的一对多的数学映射图象,与自然现象中的云有着 相似的不确定性质,所以借用“云”来命名这个数 据——概念之间的数学转换理论。
2
主要内容
0 应用实例 1 云的定义和特性 2 云模型的类型 3 云发生器 4 虚拟云 5 云变换 6 基于云模型的不确定推理
3
应用实例
一组(4*100*3)数据:
x1(1,:)=[5.1,4.9,4.7,4.6,5.0,5.4,4.6,5.0,4.4,4.9,5.4,4.8,4.8,4.3,5.8,5.7,5.4,5]; x1(2,:)=[3.5,3.0,3.2,3.1,3.6,3.9,3.4,3.4,2.9,3.1,3.7,3.4,3.0,3.0,4.0,4.4,3.9,3]; x1(3,:)=[1.4,1.4,1.3,1.5,1.4,1.7,1.4,1.5,1.4,1.5,1.5,1.6,1.4,1.1,1.2,1.5,1.3,1]; x1(4,:)=[0.2,0.2,0.2,0.2,0.2,0.4,0.3,0.2,0.2,0.1,0.2,0.2,0.1,0.1,0.2,0.4,0.4,0];
x3(1,:)=[6.3,5.8,7.1,6.3,6.5,7.6,4.9,7.3,6.7,7.2,6.5,6.4,6.8,5.7,5.8,6.4,6.5,7]; x3(2,:)=[3.3,2.7,3.0,2.9,3.0,3.0,2.5,2.9,2.5,3.6,3.2,2.7,3.0,2.5,2.8,3.2,3.0,3]; x3(3,:)=[6.0,5.1,5.9,5.6,5.8,6.6,4.5,6.3,5.8,6.1,5.1,5.3,5.5,5.0,5.1,5.3,5.5,5]; x3(4,:)=[2.5,1.9,2.1,1.8,2.2,2.1,1.7,1.8,1.8,2.5,2.0,1.9,2.1,2.0,2.4,2.3,1.8,1];
坡体向南位移20毫米左右”这个概念。
空间概念,而“滑坡体向南位移20毫米”就是一个空间数据,
是该定性概念在论域中的一次具体定量实现,经过云映射,
这个云滴代表该定性概念的确定程度是1。可是,这种实现
也可能是“滑坡体向南位移19毫米”等数据,代表该定性概
念的确定程度也可能是0.9等。所有的这些实现积累到一定
数量,经过云映射,在论域空间中就形成一朵云,表达“滑
14
从云的基本定义中可以看出,论域U上的概念T从论域U到区间[0,1]的映射 是一对多的关系。即论域中某一元素与它对概念T的隶属度之间的映射是一对多 的转换,而不是传统的模糊隶属函数中的一对一关系。表达概念T的云由许许多 多的云滴组成,每个云滴均是这个定性概念映射到数域空间的一个点,即定性概 念的语言值在数量上的一次具体样例实现。这种实现带有不确定性,模型同时给 出这个点能够代表该定性概念的确定程度。每个云滴都是随机产生的,而且每个 云滴代表该定性概念的确定程度也是模糊的,始终在细微变化着。