单立柱巷道堆垛机说明书
单立柱有轨巷道式堆垛机结构设计

单立柱有轨巷道式堆垛机结构设计
单立柱堆垛机的设计结构通常包括以下几个方面:
1. 垂直吊挂系统:单立柱堆垛机通常配备垂直吊挂系统,用于悬挂货物并通过垂直运动使货物上下移动。
这种系统通常包括一个吊杆和一个吊钩,通过电动驱动进行上下移动。
2. 行走系统:单列式堆垛机通常配置一组行走轨道,通过行走轨道和行走驱动器的驱动,实现机器的行走和位置的调整。
行走系统通常具有平移和旋转功能。
3. 升降系统:除了垂直吊挂系统外,单立柱堆垛机还配备了升降系统。
通过一组电动驱动升降啮合机构控制货台板的升降,使货物从地面升高到所需的高度。
4. 控制系统:单列式堆垛机的控制系统通常包括电气控制柜和操作面板。
操作面板通常安装在机器的侧面,用于手动控制机器运行、故障报警及维护设置。
以上就是单立柱有轨巷道式堆垛机的基本结构设计,它们的配置和选择通常会根据用户的需求以及具体的操作要求来确定。
系统说明文档(堆垛机部分)

天津市供电公司电能计量资产智能管理系统说明全自动立体库房硬件主要由堆垛机、货架、输送链、控制台四大部分组成,控制软件主要由组态软件构成,整个系统的自动化程度很高,无需人为控制。
本文介绍手动操作之后,重点说明自动控制部分。
1.将堆垛机控制柜上的“手动/自动”开关打到手动档(图示位置,PLC输入点I0.1亮)2.在操作过程中面对堆垛机控制柜,点动一下“向上”按钮,叉伸平台即会向上移动一个位置;点动一下“向下”按钮,叉伸平台即会向下移动一个位置;点动一下“前”按钮,堆垛机即会向前方移动一个位置;点动一下“向后”按钮,堆垛机即会向后方移动一个位置;点动一下“向右”按钮,叉板就会向右边移动一个位置;点动一下“向左”按钮,叉板就会向左边移动一个位置。
当到达某个位置时堆垛机会自动停下。
在叉板伸出后点动“向前”“向后”按钮将不会有任何反应,此时需点动“向左”或“向右”按钮使叉板回到中间位置。
这样就起到了一个保护的作用。
3.堆垛机位置的确定:货仓从左至右依次是1-14列,从下至上1—7层。
立体货仓的仓位地址使用字符串表示:前两位表示仓位所在行,用A2表示;中间两位是堆垛机的所在列;后两位是堆垛机的所在层。
如:“A20401”,表示堆垛机的当前所在位置为外面一行第4列第1层。
需要注意的是堆垛机叉板每层都有上下两个位置,用来抬起货物和放下货物。
正确的初始位置应该是在每层的下位。
将输送链和堆垛机电源全部打开后直接点击桌面上名为自动仓储系统的快捷方式,此时将同时打开条码扫描和组态王两个程序。
界面分别如下:图1.条码扫描程序图2.组态王程序进入运行界面后,要核对堆垛机当前所在的位置。
若实际位置和软件显示不符,请点击堆垛机复位按钮。
(请勿在堆垛机运行时点击)如果出现以下界面说明是条码扫描程序已经打开。
出现建立DDE失败的情况说明在组态王软件打开时,条码扫描程序未能打开。
堆垛机的出入库指令由管理软件来发,堆垛机自动执行该任务。
关于堆垛机单双立柱特点的简单介绍
运行机构是堆垛机水平运动的驱动机构。驱动单元采用德国SEW的电机减速机(还有部分采用的是德国DEMAG电机减速机),性能安全可靠。上横梁通过立柱连接于运行机构,并通过导向轮抱紧货架的天轨,从而实现了堆垛机在库内能沿着轨道行进,对货物进行存取和拣选作业。在运行机构上还安装了SICK的激光测距,保证了不同货位的停准精度。
库内的堆垛机具备一套完整的电气控制系统,以控制堆垛机的正常工作。设备电源来源于货架顶端或底端固定的滑触线,三相五线制,交流380V,50Hz。
堆垛机控制系统分三种工作方式,即手动、单机自动、联机自动。
手动方式:工作人员站在电气柜前的踏板上,可以操作堆垛机随意停在巷道内的任意位置。手动控制主要用于堆垛机调试阶段或自动控制出故障时应急使用;
单机自动方式:工作人员在操作面板上设定命令后,即可启动堆垛机,使其自动完成物品的存取工作;
联机自动:堆垛机接收管理机发给的命令,收到命令后,按命令自动进行作业。
有轨巷道堆垛机由金属结构(包括上、下横梁及立柱)、载货台、运行机构、起升机构、货叉机构、限速防坠装置、过载松绳装置、电气控制装置等部件组成。
(见运行机构照片。)
1.7过载及松绳保护装置
过载及松绳保护装置由碟形弹簧、轴、撞尺、开关等元件组成。它的主要作用是:当载货台上的货物重量超过额定起重量的25%时,或载货台上的重量低于空载重量的75%时,撞尺均与开关接触发出信号,通过程序判断即时停止起升电机的运行,保证设备安全。
1.8电气装置
电气装置由电气控制柜、行程开关、滑触线集电器、光电开关、撞尺、激光测距以及红外通信装置等组成。电气控制柜装设在立柱背面下横梁上。在控制柜的正面装有自动操作面板。行程开关分别装在下横梁、立柱等位置,其作用是控制堆垛机起升上下极限位置及强迫换速;运行强迫换速及前后极限位置。光电开关装在载货台上,作用是探测货格内、载货台上、或出入库输送机上有无货物,以免堆垛机误操作或双重入库。载货台上有多个微动开关用来确定叉体伸缩位置。激光测距配合起升和运行电机用于起升和运行定位,红外通信装置作用是接收监控机发出的信号,使堆垛机接受指令并完成自动作业,同时反馈堆垛机的工作状况。
单立柱巷道式堆垛机机械设计说明书

学院本科毕业设计(论文)巷道式堆垛机机械部分设计学生:余威学生学号: 7院(系):机械工程学院年级专业:2012级机械设计制造及其自动化指导教师:新德讲师二〇一六年六月摘要本文详细论述了普遍应用在现代大中型企业中的单立柱有轨巷道式堆垛机的设计方案。
文中对堆垛机的分类,特点及其构造进行了详细的叙述。
堆垛机是自动化立体仓库中最重要的起重堆垛设备,是随着立体仓库的出现而发展起来的专用起重机。
它能够在自动化立体仓库的巷道中来回穿梭运行,将放置在巷道口的货物存入指定的货格,或者从货格中取出货物运送到巷口。
设计重点主要包括:堆垛机的机架、升降机构、行走机构、货叉伸缩机构以及安全机构。
文章在确定堆垛机的总体设计方案的前提下,再对各个机构进行受力分析和设计计算,最后进行必要的相关校核并最终确定各个的机构实际取值。
本次的毕业设计运用多种起重机的现代设计方法,特别是运用计算机辅助设计(CAD)的方法,在计算机上将堆垛机的设计图纸CAD化,大大提高了设计的效率,节省时间。
关键词:自动化立体仓库;堆垛机;升降机构;行走机构;货叉伸缩机构;安全机构ABSTERCTThis article has discussed the design of the single-pillar type of Narrow-AisleStacker Crane which has been universally used in modern most enterprises in detail.This article described the kinds of stakers, features and the structure in detail.Stacker cranes is the most important part of the automation three-dimensional storehouse among the take heavy crane pile up equipment, it can in the tunnel of automation cube in the shuttle operation of round trip, will locate in tunnel thegoods of mouth stock goods shelf; or opposite take out the goods transit in goodsshelf go to tunnel mouth.The design focus mainly include: The stacker's rack, walk organization, fork telescoping mechanism and safe organization. Under the premise of overall designscheme of stacking crane, then for organization analyze by force condition calculate. Finally, check nuclear necessarily and definite every numerical.This Graduation Design use many kinds of Modern Designs of the crane, especially to use the method of Computer-aided design(CAD),Stackers will be thedesign drawings of the CAD on the computer, which greatly improve the efficiencyof the design and saving time.Keywords: Automation three-dimensional storehouse Stacker Crane Movement organization Walk organization Fork telescoping mechanism Safe organization目录摘要 (I)ABSTRACT (II)1 引言.................................................. 错误!未定义书签。
巷道堆垛机
巷道堆垛机
❖ 七、 注意事项
❖ A.在使用本系统前,请检查巷道内是否有异物,以防止损 坏堆垛机。
❖ B.在使用本系统时,巷道内不可站人,以免造成伤害。 ❖ C.使用时请不要打开堆垛机控制柜的柜门,以免触电。 ❖ D.当堆垛机载货台升起时,人不要站在下面观望,以免造
成伤害。
❖ E.不要随意变更传感器和行程开关的位置,以防止意外。 ❖ F.不要随意变更货位上托盘和货物的位置,以防止意外。 ❖ G.选择应急工作方式时一定要格外谨慎,注意观察,因此
时所有保护开关已不起作用。
❖ H.当工作结束后,一定要先将堆垛机开回原点,关掉总电 源,以防止意外
巷道堆垛机
❖ 八、实训任务
❖ 1、将一托盘货物采用单机自动方式进行入 库作业,存入列2,排5,层9货位。
❖ 4, 目的货位地址列2,排13,层7。
巷道堆垛机
❖ (6)货物超高:发生此故障是货物高度检测 开关动作引起的,此时须将堆垛机操作面板 工作方式选择开关旋至“本机”,检查货物 是否超高,若超高需人工整理排除原因;若 未超高则可能是货物超高检测开关已松动, 未能对准反光板,需调整货物超高检测开关 位置,使其对准反光板,货物超高检测开关 的动作指示灯灭。排除故障原因后,堆垛机 开回原点,再将堆垛机设为自动方式,重新 下达任务。
❖ 单机自动方式:在触摸屏上输入作业命令, 堆垛机即自动完成一次作业,并等待新作业。 任务作业命令完全由堆垛机控制系统执行, 与管理系统不发生联系。
巷道堆垛机
❖ 开机前准备: ❖ 首先确认巷道内无人员停留、无异物存在;
然后检查堆垛机上机械、电气安全装置是否 正常;各操作开关是否复位。一切正常后方 可上电开机。
❖ A.按用途分:单元型、拣选型、单元-拣选 型三种。
立体仓库巷道式堆垛机设计说明

1 绪论1.1 本课题研究的背景与意义我国现在正处于工业化、城市化发展的高速期,未来一段时间,土地资源和劳动力资源将会成为制约企业发展的瓶颈,鉴于此,建造立体仓库是未来企业发展趋势,自动化立体仓库是现代物流中的重要组成部分,是实现物流系统合理化的关键。
它具有空间利用率高,便于实现自动化管理,实时自动结算库存货物种类和数量等许多优点,对加快物流速度、提高劳动生产率、降低生产成本很重要,已开始应用于汽车、电子、医药、烟草、建材、邮电等许多行业。
堆垛机是自动化立体仓库中最重要的搬运、起重、堆垛设备,对立体仓库的出入库效率有决定性影响,是立体仓库能否达到设计要求的关键设备之一。
而我国在堆垛机制造技术上和世界发达国家有很大差距,鉴于我国未来物流业发展的广阔空间,堆垛机技术落后必将成为限制我国自动化立体仓库发展的瓶颈,使我国在国际物流业竞争中处于不利地位。
鉴于以上因素,发展堆垛机技术有积极意义。
1.2 有轨巷道堆垛机的发展现状有轨巷道堆垛起重机是随着立体仓库的出现而发展起来的专用起重机,通常简称为堆垛机。
其主要用途是在高层货架仓库的巷道沿轨道运行,将位于巷道口的货物存入货格,或者相反,取出货格的货物运送到巷道口,完成出入库作业。
20世纪70年代初期,我国开始研究采用巷道式堆垛机的立体仓库,1980年我国第一座自动化立体仓库在汽车制造厂投产,从此自动化立体仓库在我国得到了迅速发展。
据不完全统计,到目前已建成三百余座。
堆垛机做为立体仓库中最重要的起重运输设备,也得到了较快的发展。
早期的堆垛机是在桥式起重机的起重小车上悬挂一个门架,利用货叉在立柱上的上下运动与立柱的旋转运动来搬运货物,通常称之为桥式堆垛机。
1960年左右在美国出现了巷道堆垛机,这种堆垛机是在地面的导轨上行走,利用货架上部的导轨防止倾倒。
随着立体仓库的发展,巷道堆垛机逐渐替代了桥式堆垛机。
随着计算机控制技术和自动化立体仓库的发展,堆垛机的应用越来越广泛,技术性能越来越好,高度也在不断增加,到1970年实现了由货架支承的高度为40米的堆垛机。
高40m单立柱巷道堆垛机的特点及应用

高40m单立柱巷道堆垛机的特点及应用近年以来,物流装备市场蓬勃发展,其中自动化立体仓库的建造高度也在不断增加。
目前国内大部分厂家能够制造的堆垛机的高度在18m~24m之间,少部分能够达到30m的高度。
随着仓储市场的进一步发展,客户越来越要求提高立体仓库的库容量,节省土地资源的投资,提高土地的利用效率,实现集约化的生产,因此对30~m至40m之间的立体仓库的需求越来越多。
这种大高度的立体仓库广泛应用在批发配送、食品饮料、烟草存储和第三方物流服务等行业。
目前国内多数立体仓库采用的是单立柱巷道堆垛机,其优点是结构简单,横向尺寸紧凑,巷道占宽小,而且围绕立柱可以选用多种载货台,比较容易地进行模块化设计和组装。
其立柱金属结构一般采用焊接箱型梁结构,具有截面大、结构整体刚性好、不易失稳、载货台承载能力大等特点,比较适合应用在20m以上的单元托盘式堆垛机上。
德马泰克RapidStore UL 1500系列堆垛机主要用于高度在30m以上的自动化立体仓库,在欧洲市场有众多的实施项目。
为适应中国和东南亚市场对超高堆垛机的需求,徳马泰克物流系统(苏州)有限公司引进RapidStore UL 1500的技术,成功实现了本地化生产,并补了国内超高堆垛机设计和制造的技术空白。
下面对高40m的单立柱巷道堆垛机在产品设计、装配搬运及应用规划等方面的特点和应用案例进行介绍。
一、产品设计1.高强度与高刚性的金属机构金属结构是堆垛机的骨干,直接决定了堆垛机的动态性能和安全性能。
高40m堆垛机的金属结构应具有足够的强度和刚性,以满足堆垛机在静止、加减速、运行和急停过程中的操作要求。
金属结构为型钢和钢板拼焊成的箱型梁组成。
以载货台带载并处于立柱顶部时为研究对象,对其进行力学分析计算,该金属结构的各项技术性能的计算结果如下。
金属结构处于静态时,各结构变形的允许值满足《FEM9.831 Calculation principles of storage and retrial machines Tolerance, deformations and clearances in the high-bay warehouse》的要求。
机械毕业设计(论文)-巷道式单立柱型堆垛机设计
2.1 单立柱型堆垛机的结构组成部分 ..............................................................................4 2.2 单立柱型堆垛机的工作方式 ......................................................................................4 2.3 堆垛机各部分的速度计算及选择 ..............................................................................5
Key words: single column type,stacker,structural design, stress check
IV
江苏科技大学本科毕业设计
目录
第一章 绪论.................................................................................................................... 1
4.1 载货装置电机选用 .....................................................................................................14 4.2 提升机构电机选择 .....................................................................................................14 4.3 行走电机选用 .............................................................................................................15 4.4 本章小结 .....................................................................................................................15
堆垛机PLC说明书

广西大学《机电传动与控制》课程作业题目:基于PLC巷道堆垛机定位控制系统专业:机械工程学院物流工程专业班级:物流工程071班姓名:苏晓春指导教师:莫以为成绩:摘要现代社会物流概念已经备广泛接受,仓储作为物流活动的一个重要环节正在不断向自动化发展。
计算机自控技术的飞速发展,为现代企业的物流管理提供了重要的技术支持。
仓储技术的发展决定了仓储活动的效率,因此自动化仓储技术被广泛应用。
自动化立体仓库就是自控技术在物流管理上的一个很好的应用。
自动化立体仓库不仅具有节省用地、减轻劳动强度、提高物流效率、降低储运损耗、减少流动资金积压等功能,而且在沟通物流信息、衔接产需、保证生产均衡、合理利用资源、进行科学储备与生产经营决策等方面发挥着独特的作用,使人们真正享受到现代计算机技术应用于企业物流管理的益处。
本文主要针对自动化立体仓库的必备设备——巷道堆垛机的自动取货控制系统进行定位设计。
首先选择堆垛机的驱动电机,然后针对系统需要选择调节速度的变频器,接着确定堆垛机的寻址方式再选用PLC,最后是控制电路的设计,包括堆垛机步序确定、绘制梯形图及步序指令编写。
关键字:堆垛机认址变频 PLC目录第一章巷道式堆垛机概述------------------------------------------------- 41.1 巷道式堆垛机---------------------------------------------------- 41.2 堆垛机系统分析-------------------------------------------------- 4 第二章驱动电机的选择--------------------------------------------------- 52.1 堆垛机电机特点-------------------------------------------------- 52.2 堆垛机水平运行机构电机选择-------------------------------------- 62.3 起升机构电机选择------------------------------------------------ 62.4 货叉驱动电机的选择---------------------------------------------- 7 第三章变频器的选择------------------------------------------------------ 83.1 变频器简介------------------------------------------------------ 83.2 水平运行机构变频器的选择--------------------------------------- 103.3 提升机构变频器的选择------------------------------------------- 10 第四章认址方式的选择--------------------------------------------------- 114.1 光电传感器原理------------------------------------------------- 114.2认址方式选择---------------------------------------------------- 12 第五章输入输出及元器件确定-------------------------------------------- 155.1输入输出点确定-------------------------------------------------- 155.2元器件选择------------------------------------------------------ 16 第六章 PLC的选用------------------------------------------------------ 176.1 PLC的选用------------------------------------------------------ 176.2 PLC的I/O点分配------------------------------------------------ 18 第七章堆垛机取货PLC控制---------------------------------------------- 197.1堆垛机出库动作顺序---------------------------------------------- 197.2堆垛机运行分析-------------------------------------------------- 197.3 PLC接线-------------------------------------------------------- 217.4 PLC控制的实现-------------------------------------------------- 22 总结------------------------------------------------------------------- 28 参考文献--------------------------------------------------------------- 28第一章巷道式堆垛机概述1.1 巷道式堆垛机1.1.1巷道式堆垛机简述巷道式堆垛机是现代自动化立体仓库的主要设备之一,主要用来进行出、入库作业。
堆垛机说明书资料
堆垛机说明书资料一、引言堆垛机是一种自动化物料搬运设备,广泛应用于仓储、物流和创造业等领域。
本文档旨在提供堆垛机的详细说明,包括设备的基本原理、结构组成、操作方法、安全注意事项等内容,以匡助用户正确使用和维护堆垛机。
二、设备概述1. 设备名称:堆垛机2. 设备型号:XYZ-12343. 设备用途:用于自动化堆垛和搬运物料4. 设备特点:高效、精确、可靠、安全5. 设备结构:包括底盘、立柱、升降机构、横移机构、夹具等部件三、工作原理堆垛机采用先进的控制系统和传感器,通过自动化程序实现物料的堆垛和搬运。
其工作原理如下:1. 感应:堆垛机通过激光、红外线等传感器感知物料的位置和尺寸。
2. 规划:根据感应结果,控制系统规划最佳的堆垛路径和搬运动作。
3. 动作:堆垛机根据规划结果,通过升降机构、横移机构和夹具等部件实现物料的堆垛和搬运。
4. 监控:控制系统实时监控设备运行状态和物料堆垛情况,确保工作安全和效率。
四、设备组成1. 底盘:提供设备的基本支撑和挪移功能。
2. 立柱:支撑升降机构和横移机构,实现垂直和水平方向的运动。
3. 升降机构:通过液压或者电动机驱动,实现物料的升降操作。
4. 横移机构:通过电动机驱动,实现物料的水平横移操作。
5. 夹具:用于夹持物料,确保安全和稳定的堆垛和搬运。
五、操作方法1. 开机准备:确认设备电源连接正常,检查各部件是否完好。
2. 参数设置:根据物料尺寸和堆垛要求,设置设备的工作参数,如堆垛高度、堆垛速度等。
3. 物料摆放:将待堆垛的物料放置在指定位置,确保物料整齐且不超出设备承载范围。
4. 操作控制:通过设备控制面板或者远程控制器,选择相应的操作模式和动作,启动堆垛机工作。
5. 监控与调整:在堆垛过程中,实时监控设备运行状态和物料堆垛情况,根据需要进行调整和干预。
6. 关机操作:在堆垛作业完成后,按照设备操作规程进行关机操作,断开电源并进行设备的清洁和维护。
六、安全注意事项1. 操作人员必须经过专业培训,熟悉设备的操作方法和安全规程。
(完整版)堆垛机安装指导书
堆垛机安装指导书一、总则1、 为了指导堆垛机安装及验收,确保质量和安全,制定本规范。
2、 安装施工应严格按图施工。
当施工时发现现场和设计图纸有不符之处,应及时提出,经双方批准变更后方可施工。
3、 安装中采用的各种计量和检测器具、仪器、仪表和设备应符合国家现行计量法规的规定,其精度等级不低于安装要求的精度等级。
4、 货架安装前的隐蔽工程应在工程隐蔽前进行检验,合格后方可继续施工。
5、 安装中应进行必要的自检,并作相应的记录。
堆垛机安装施工,除应按本规范执行外,还应符合国家(行业)现行标准规范的规定。
二、施工准备2.1施工条件➢ 安装施工前,应核对图纸,检查现场和图纸情况是否有出入;➢ 对立体库、特殊的或复杂的安装应事先编制施工方案,并备案留底;➢ 通往安装现场的道路必须畅通零部件应摆放在合理区域;➢ 现场安全(如不与治安条件冲突等);➢ 与其它项目工程队伍不存在作业冲突;➢ 安装施工前,现场屋面及内部粉刷等工程应基本完工,有关的基础地坪、沟道应已完工,其混凝土强度应不低于设计强度的75%;➢ 安装施工地点及附近的杂物、垃圾等,应清除干净;➢ 现场提供永久或临时性的照明设备;➢ 现场提供永久或临时性的电力供应;2.2收件检查和保管➢ 开包或开箱前,应对照发运清单进行检查,并做相应记录。
如发现散包、缺件、严重损坏时应及时反映,对散包、损坏、表面严重磨损的构件就地拍照,图像。
➢ 资料及时存档,并与供货商联系。
➢ 构件、机械和工具均应妥善保管,不得使其变形、损坏、错乱或丢失。
2.3.埋件(预置坑)检查➢预埋件(预置坑)的布置、几何尺寸和质量要求,应该符合图纸规定。
布置后或安装前应对预埋件(预置坑)进行复检。
三、组装、放线1、组装时应该对构件逐一进行校正,对组件进行尺寸核对,设立放线依据。
2、应按平面图和有关建筑物的轴线、边缘线及标高线,划定安装的基准线。
四、地脚螺栓装设地脚螺栓应符合下列要求:1、膨胀螺栓或化学螺栓,中心线应按图进行放线画线。
巷道式堆垛机的使用流程
巷道式堆垛机的使用流程1. 堆垛机的基本介绍•巷道式堆垛机是一种用于货物存储和取放的自动化设备。
•它可以在仓库的巷道中自动运行,从而提高仓库的存储效率。
•堆垛机通常由机器人和控制系统组成,可以根据仓库中货物的需求进行自动化操作。
2. 堆垛机的使用前准备•在使用堆垛机之前,需要进行一些准备工作。
•首先,需要确保仓库中的货物已经按照一定的规则堆放好,以便堆垛机能够正常运行。
•其次,需要对堆垛机进行检查和保养,确保其状态良好,准备好运行。
3. 堆垛机的启动和停止•在使用堆垛机之前,需要先启动它。
•首先,需要确保电源已经连接好,然后打开机器人的控制面板。
•在控制面板上,可以选择启动堆垛机的选项,按下相应的按钮即可启动。
•在堆垛机运行时,需要注意其运行状态并及时停止和调整。
4. 堆垛机的货物存储•堆垛机主要用于货物的存储,它可以将货物从一个位置移动到另一个位置。
•在进行货物存储之前,需要先确定货物的位置和目标位置。
•堆垛机可以通过扫描仓库中的二维码或RFID识别货物的位置。
•一旦货物的位置确定,堆垛机可以通过自动化操作将货物从起始位置移动到目标位置。
5. 堆垛机的货物取放•当需要取放货物时,堆垛机同样可以提供帮助。
•在进行货物取放之前,需要先确定货物的位置和目标位置。
•堆垛机可以通过扫描仓库中的二维码或RFID识别货物的位置。
•一旦货物的位置确定,堆垛机可以通过自动化操作将货物取出或放入目标位置。
6. 堆垛机的检查和维护•在使用堆垛机之后,需要进行定期的检查和维护工作,以确保其正常运行。
•首先,需要检查堆垛机的各个部件是否正常,如传感器、执行器等。
•其次,需要清洁堆垛机的各个部分,保持其干净整洁。
•最后,需要根据堆垛机的使用情况,对其进行维护和保养,以延长其使用寿命。
7. 堆垛机的安全注意事项•使用堆垛机时,需要注意安全事项,以避免意外事件的发生。
•首先,必须严格按照使用说明进行操作,不得擅自改变堆垛机的设置和参数。
单立柱巷道堆垛机说明书

单立柱巷道堆垛机说明书本科毕业设计说明书题目:单立柱巷道堆垛机提升装置与载货台设计院(部):机电工程学院专业:机械工程及自动化班级:机械121班姓名:孙世良学号:20120711031指导教师:周海涛完成日期:2016年6月10日目录摘要 (1)ABSTRACT (2)1绪论 (3)1.1 单立柱巷道堆垛机的结构及研究意义 (3) 1.2 堆垛机研究情况及评述 (3)1.3 课题关键问题及解决方法 (6)1.4 单立柱巷道堆垛机的设计参数 (8)2 单立柱巷道堆垛机提升装置设计 (9)2.1 单立柱巷道堆垛机的特点 (9)2.2 提升装置部分设计 (9)2.2.1柔性件的选取 (10)2.2.2 卷筒的选取 (10)2.2.3 电动机的选取 (10)2.2.4 减速器的选取 (11)2.2.5 制动器的选取 (12)2.3提升装置部分的计算 (13)2.3.1钢丝绳的计算 (13)2.3.2 卷筒的相关尺寸计算 (13)2.3.3电动机的计算 (15)2.3.4减速器的计算 (17)3 单立柱巷道堆垛机载货台设计 (18)3.1 载货台货叉方案设计 (18)3.2 堆垛机货叉设计计算 (20)3.2.1 伸缩货叉的挠度与强度 (20)3.2.2 下叉的受力分析计算 (20)3.2.3 中叉的受力分析计算 (21)3.2.4 上叉的设计分析计算 (23)3.3 货叉各参数的选择 (24)4堆垛机的控制装置及保护措施 (25)4.1堆垛机控制装置 (25)4.2堆垛机安全保护装置 (25)5 结论 (27)谢辞 (28)参考文献 (29)摘要本文详细论述了普遍应用在自动化立体仓库中的单立柱有轨巷道式堆垛机的设计方案。
文中对堆垛机的分类,特点及其构造进行了详细的叙述。
堆垛机是自动化立体仓库中最重要的起重堆垛设备,是随着立体仓库的出现而发展起来的专用起重机。
它能够在自动化立体仓库的巷道中来回穿梭运行,将放置在巷道口的货物存入指定的货格,或者从货格中取出货物运送到巷口。
巷道堆垛机
巷道堆垛机无锡中鼎巷道堆垛机说明巷道式堆垛机是自动化立体仓库的主要设备。
它是现代仓储物流系统中迅速发展的一个重要组成部分,具有节省占地面积、人力;作业快捷准确;提高收发效率;降低储运费用等优点。
通常与上位计算机联机组态后组成自动化仓储物流系统。
是连接生产、销售与管理的重要环节。
我公司生产的堆垛机采用德国技术,钢丝绳牵引,有整体(不分段)单立柱(箱型和变截面)和双立柱两种形式。
电机减速器采用德资SEW或诺德(NORD)产品;可编程控制器(PLC)采用西门子(SIEMENS)产品;变频器主要采用法国施耐德产品;红外通信器采用德国倍加福(P+F)或劳易测(LEUZE)产品;激光测距器采用LEUZE或德国史克(SICK)产品;编码器采用SEW或P+F;条码认址器采用LEUZE产品;电器元件全部采用美国霍尼韦尔(HONEYWELL)、德国施迈赛(SCHMERSAL)、欧姆龙(OMRON)等进口品牌产品。
以此确保堆垛机运行的安全性和可靠性。
我公司堆垛机结构的主要特点▲单立柱为整体箱式矩形或变截面结构形式,在立柱两侧一次焊接两条特别的冷拉扁钢导轨(材质16Mn),导轨表面冷作硬化处理,耐磨性好。
焊接中采用了特殊的自动焊接技术,有效解决整体结构的变形。
▲货叉形式为超薄形C型梁体,上、下叉采用40Cr锻件通过15道工序3道热处理精制而成,使得刚性和柔性达到最佳状态,提高了承载能力,降低了下扰度。
与电机的连接应用了可调节摩擦连接器,确保了设备和货物的安全。
▲限速防坠(超速保护)装置是国家“75”攻关项目,具有连续测速、防坠功能。
该装置不依赖于其它动力和电气控制,独立可靠地工作。
当堆垛机的载货台由于某种原因(如钢丝绳断裂,升降电机减速机断轴等),引起载货台失速下坠,该装置立即启动夹紧装置将载货台和货物可靠地锁住在导轨上,同时切断电源,确保设备及货物的安全。
符合《JB5319·2-91有轨巷道堆垛起重机安全规范》的要求。
堆垛机DQ511说明书3_故障报警
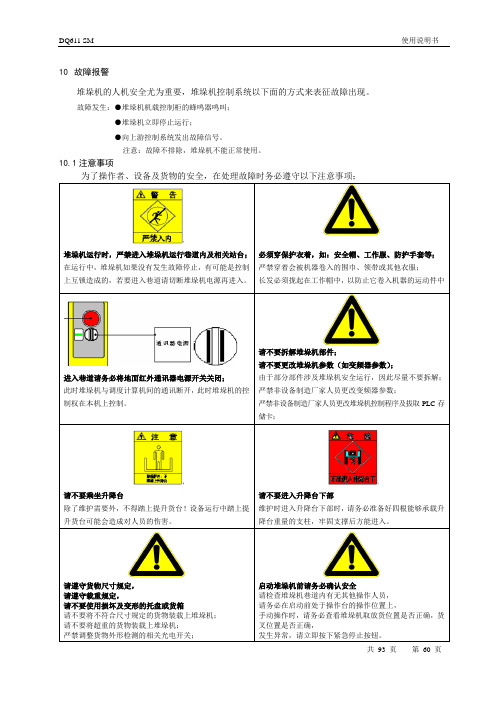
10故障报警堆垛机的人机安全尤为重要,堆垛机控制系统以下面的方式来表征故障出现。
故障发生:●堆垛机机载控制柜的蜂鸣器鸣叫;●堆垛机立即停止运行;●向上游控制系统发出故障信号。
注意:故障不排除,堆垛机不能正常使用。
10.1注意事项10.2故障画面的显示及操作堆垛机有故障时,在操作画面内(包含“手动控制”、“自动控制”、“在线控制”三个画面)将弹出故障按钮;点击可进入故障查询画面,进入故障信息画面,可以看到具体的故障信息;请排除故障,具体排除故障方法请参阅以下内容。
排除故障后,按下操作面板上蓝色复位按钮;10.3 堆垛机故障列表表一故障列表10.4 堆垛机故障排除方法10.4.2与升降相关故障排除方法10.4.3与货叉相关故障排除方法10.4.4其它故障排除方法10.4.5故障排除操作过程中需特别注意的事项在处理故障过程中,难免需要切换操作模式来处理相关故障,在切换操作模式过程中,将导致堆垛机因任务产生的运行步骤的调整,因此在处理故障时,若堆垛机有任务,则需先查看堆垛机的任务步骤当前执行的情况,切换操作模式处理完故障后,返回原操作模式需再次查看任务执行步骤的调整情况后再决定如何操作堆垛机。
1)任务步骤的概念:当堆垛机在单机、在线状态有任务被添加时,在“自动控制”和“在线控制”画面内将显示,此时点击进入“任务步骤查询”画面2)各步骤对应的堆垛机状态3)示例:当堆垛机在“在线操作”模式或是“单机操作”模式下发生故障时,请“点击查看任务步骤”按钮进入任务步骤查询画面查看任务执行的当前步骤;在任务查询画面内可以看到,当前任务执行到第4步收叉,此时堆垛机执行的任务是取货任务,此时故障需要手动处理才能复位(如左超长故障),此时需将操作模式转为手动,处理完故障后需切换回原操作模式“点击查看任务步骤”查询按钮查询任务步骤,可以看到任务步骤已调整为第1步跑位,此时需查看堆垛机的状态是否与2)条列表中第一步跑位状态一致,若不一致则需把堆垛机状态恢复到该步骤对应状态,若状态不一致启动堆垛机,则堆垛机将报警。
巷道堆垛式式停车设备的技术说明
巷道堆垛式式停车设备的技术说明1.全自动机械式停车库系统功能详述产品选择:针对占地面积小、使用方便、存取车比较集中、频繁的特点,我们选择的是巷道堆垛类机械式立体停车库。
车辆搬运方式有很多种,我们选择的是梳型搬运方式。
梳型搬运交接非常快速,使用前轮定位,并且有车轮自动对中装置(停歪点也没关系,并且保证车辆在设备运行过程中的安全),可靠性非常高,梳型搬运的车位上的设备是梳型架,搬运器是梳型结构,与车位的梳齿间隔设置,梳型搬运连续取车的速度非常优越。
方案数量规格本车库为全自动智能仓储式机械立体停车库。
采用巷道堆垛类停车,采用梳齿式交换进行存取车。
型号为PXD-YF,分2个库,总停车位数为255个。
车库设计4个出入口。
在进出口室外设置有停车状态指示灯(红/黄/绿),起引导作用。
存车入库时,司机直接驶车进入库口,在停车状态指示箱的指导下将车停好,在出入口操作盘上进行刷卡操作,将汽车开进入口内;堆垛机上的梳型交换搬运器将入库车辆移至堆垛机中,同时将入库车辆自动对中;然后堆垛机根据控制中心发出的指令,进行水平方位和垂直方位的复合运动,到达停放的库址;再由梳型交换搬运器完成将车辆存进停车库位的动作。
取车时,在刷卡后整个过程相反,车辆由系统自动送到出口。
在进出口设置有快速自动滑升门,该滑升门与汽车升降机运行互锁,当汽车升降机在运行时,滑升门处于关闭状态;滑升门处于开启时,则汽车升降机无法运行,保证人车安全。
在进出口室内还设置有停车状态指示箱,起引导作用。
系统安全保护措施严密,并设有闭路监控系统,在中央控制室可监控整个系统状况,确保人车安全。
系统设有停车收费管理系统。
系统操作简单、便捷,自动化程度高。
产品技术水平领先于同行业的同类产品。
* 车库设备设计使用寿命大于40年;* 容车规格:5200×1950×1550/1950mm;* 容车重量:2200kg:全自动停车库功能说明:1,系统采用全自动仓储式停车,自动化程度高。
堆垛机PLC说明书

标题:基于PLC巷道堆垛机定位控制系统概括现代社会的物流概念已被广泛接受,而仓储作为物流活动的重要组成部分,正不断向自动化方向发展。
计算机自动控制技术的飞速发展,为现代企业的物流管理提供了重要的技术支撑。
仓储技术的发展决定了仓储活动的效率,因此自动化仓储技术得到广泛应用。
自动化立体仓库是自动化控制技术在物流管理中的一个很好的应用。
自动化立体仓库不仅具有节省土地、减轻劳动强度、提高物流效率、减少储运损失、减少流动资金积压等功能,还具有传递物流信息、连接生产与需求、确保生产平衡、资源合理利用、科学储备和生产经营决策发挥着独特的作用,使人们真正享受到现代计算机技术应用于企业物流管理的好处。
本文主要针对巷道堆垛机自动取货控制系统的定位设计,这是自动化立体仓库的必备设备。
首先选择堆垛机的驱动电机,然后根据系统需要选择调速的变频器,然后确定堆垛机的寻址方式再选择PLC,最后是控制电路的设计,包括确定堆垛机步序和梯形图的绘制和步序指令的编写。
关键词:堆垛机地址识别变频PLC目录第1章巷道堆垛机概述41.1过道堆垛机41.2堆垛机系统分析4第二章驱动电机的选择52.1堆垛机电机特点52.2堆垛机6水平运行机构电机选型6I/O点分配18第一章巷道堆垛机概述1.1 过道堆垛机1.1.1 隧道堆垛机简介巷道堆垛机是现代自动化立体仓库的主要设备之一,主要用于出入库作业。
自动化立体仓库广泛应用于几乎所有行业(只要需要仓储),如机场航站楼、造纸、设备维修、轮胎制造、制药、啤酒厂等。
随着社会对仓储效率要求的提高,隧道堆垛机控制系统的工作效率、可靠性和稳定性在自动化立体仓库中发挥着至关重要的作用。
1.1.2 巷道堆垛机技术现状衡量巷道堆垛机性能的主要指标有:运行速度、起升速度、货叉速度、稳定性、地址识别准确率等。
目前国内堆垛机的起重量从几十公斤到几吨不等,运行速度达到160m/min,起升速度0-80m/min,货叉速度一直保持在0-30m/min。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科毕业设计说明书题目:单立柱巷道堆垛机提升装置与载货台设计院(部):机电工程学院专业:机械工程及自动化班级:机械121班姓名:世良学号:指导教师:周海涛完成日期:2016年6月10日目录摘要 (1)ABSTRACT (2)1绪论 (3)1.1 单立柱巷道堆垛机的结构及研究意义 (3)1.2 堆垛机研究情况及评述 (3)1.3 课题关键问题及解决方法 (6)1.4 单立柱巷道堆垛机的设计参数 (8)2 单立柱巷道堆垛机提升装置设计 (9)2.1 单立柱巷道堆垛机的特点 (9)2.2 提升装置部分设计 (9)2.2.1柔性件的选取 (10)2.2.2 卷筒的选取 (10)2.2.3 电动机的选取 (10)2.2.4 减速器的选取 (11)2.2.5 制动器的选取 (12)2.3提升装置部分的计算 (13)2.3.1钢丝绳的计算 (13)2.3.2 卷筒的相关尺寸计算 (13)2.3.3电动机的计算 (15)2.3.4减速器的计算 (17)3 单立柱巷道堆垛机载货台设计 (18)3.1 载货台货叉方案设计 (18)3.2 堆垛机货叉设计计算 (20)3.2.1 伸缩货叉的挠度与强度 (20)3.2.2 下叉的受力分析计算 (20)3.2.3 中叉的受力分析计算 (21)3.2.4 上叉的设计分析计算 (23)3.3 货叉各参数的选择 (24)4堆垛机的控制装置及保护措施 (25)4.1堆垛机控制装置 (25)4.2堆垛机安全保护装置 (25)5 结论 (27)辞 (28)参考文献 (29)摘要本文详细论述了普遍应用在自动化立体仓库中的单立柱有轨巷道式堆垛机的设计方案。
文中对堆垛机的分类,特点及其构造进行了详细的叙述。
堆垛机是自动化立体仓库中最重要的起重堆垛设备,是随着立体仓库的出现而发展起来的专用起重机。
它能够在自动化立体仓库的巷道中来回穿梭运行,将放置在巷道口的货物存入指定的货格,或者从货格中取出货物运送到巷口。
设计重点主要包括:载货台、升降机构、货叉伸缩机构以及安全机构。
文章在确定堆垛机的部分设计方案的前提下,再对各个机构进行受力分析和设计计算,最后进行必要的相关校核并最终确定各个的机构实际取值。
关键词:堆垛机;升降机构;载货台;货叉伸缩机构;ABSTRACTThis article has discussed the design of the single-pillar type of Narrow-Aisle Stacker Crane which has been universally used in modern most enterprises in detail. This article described the kinds of stakers, features and the structure in detail. Stacker cranes is the most important part of the automation three-dimensional storehouse among the take heavy crane pile up equipment, it can in the tunnel of automation cube in the shuttle operation of round trip, will locate in tunnel the goods of mouth stock goods shelf; or opposite take out the goods transit in goods shelf go to tunnel mouth.The design focus mainly include: The stacker's rack, walk organization, fork telescoping mechanism and safe organization. Under the premise of overall design scheme of stacking crane, then for organization analyze by force condition calculate. Finally, check nuclear necessarily and definite every numerical.Keywords: Stacker;Crane;Movement organization;Fork telescoping mechanism1绪论巷道堆垛起重机是自动化立体仓库的标志,对立体仓库的出入库效率有重要影响。
本文从堆垛机的应用特点入手,着重就堆垛机的结构设计进行研究。
1.1 单立柱巷道堆垛机的结构及研究意义在立体仓库中,堆垛机是自动化立体仓库中最主要的作业机械设备,是输送系统的核心设备,决定着整个出入库是否能流畅运行的关键,是代表立体仓库特征的标志。
自动化立体仓库作为现代物流系统的重要组成部分,是一种多层存放货物的高架仓库系统。
它是在不直接进行人工干预的情况下由巷道堆垛机实现货物的存储和取出,整个过程由计算机网络管理和自动控制系统完成。
它的合理的速度控制、精确的定位设计以及优良的故障诊断系统是实现堆垛机高效率、高准确度、高度安全性运行的重要因素。
堆垛机主要用途是在高层货架仓库的巷道沿轨道运行,将位于巷道口的货物存入货格;或者取出货格的货物运送到巷道口,完成出入库作业。
自动化立体仓库最早诞生在美国,20世纪70年代初期,我国开始研究采用巷道式堆垛机的立体仓库,据不完全统计,到目前已建成三百余座。
堆垛机做为立体仓库中最重要的起重运输设备,也得到了较快的发展。
进入20世纪80年代,在世界发展迅速,使用围涉及几乎所有行业,它的出现标志着现代工业技术步入了一个加速发展的阶段。
自动化仓库技术的研究对优化资源配置、提高企业生产率,降低生产成本有着非常重要的意义。
堆垛机性能的优劣,对整个立体仓库的运行起着重要的作用。
自动化立体物流仓库是先进的物流仓储设备,但就我国现有发展水平来看,在自动化立体仓库中设计出造价低廉、工作可靠的堆垛机替代原有仓库的控制和管理,能更加适应某些中小企业要求投资少见效快的目标。
堆垛机是自动化立体仓库中最主要的作业机械设备,是输送系统的核心设备,决定着整个出入库是否能流畅运行的关键,是代表立体仓库特征的标志。
自动化立体仓库作为现代物流系统的重要组成部分,是一种多层存放货物的高架仓库系统。
1.2 堆垛机研究情况及评述20世纪60年代在美国首先产生了机械式立体仓库,在该仓库系统中,操作人员可通过一些电器按钮和开关来控制一些机械设备进行入/出库作业,实现了搬运的机械化;到20世纪70年代末,随着可编程控制器PLC、自动存取AS/RS(Automatic Storage and Retrieval System)、自动导引小车AGVS(Automatic Guided Vehicles)、条形码阅读器(Bar-Code Scanner)等设备在立体仓库中的应用,出现了自动化立体仓库系统(Automated High-rise Warehouse System),实现了控制自动化;到本世纪80年代末,计算机技术的异军突起及其在自动化仓库系统中的成功应用,导致了第三代集成化立体仓库系统的诞生,实现管理微机化;进入90年代,出现了智能型立体仓库系统(Intelligent High-rise Warehouse System),该仓库系统不仅实现了对入/出库作业和仓库信息的全自动处理,而且还可根据生产计划、报表分析制定出所需材料与劳动力,并依据物资的现有库存量提出外购建议;目前随着电子数据交换EDI技术的发展及应用,自动化立体仓库系统逐步向3I(Intelligent,Integrated, Information)仓库系统过渡。
图1-1 立体仓库模型图在我国,立体仓库的发展是从70年代初期开始的。
1980年由机械工业自动化研究所等单位研制建成我国第一座自动化立体仓库,并在汽车制造厂投产。
从此以后,立体仓库在我国得到了迅速的发展。
据不完全统计,目前我国已建成的立体仓库近300个,其中全自动化的立体仓库有30多个。
如在我国最早研制、开发、生产自动化立体仓库的专业生产厂家之一的双塔刚玉股份,就相继推出了填补行业空白的高水平240米/分高速堆垛机、防爆立体仓库、低温冷冻库、轮胎库等一系列高、精、尖产品。
该公司于2005年成功开发“GDX型有轨巷道堆垛机起重机”,运行速度达240米/分,成为目前国速度最快的堆垛机。
该公司研制的轻钢结构“库架合一”式自动化立体仓库及高性能堆垛机,因采用了激光测距定位系统及现场总线控制技术,具有速度高、运行平稳、定位准确等特点。
2000年起重运输机械研究所完成了我国迄今国产规模最大、技术水平最高的大型全自动化立体库仑库─联想电脑公司集成化物流系统的研究,其中也采用了激光测距定位技术。
近年来,由有轨巷道式堆垛机组成的自动化立体仓库的应用越来越普及,对堆垛机的安全性和运行效率也提出了越来越高的要求。
堆垛机定位系统中的认址技术作为控制技术中的关键技术,也自然成为业人士关注的焦点。
堆垛机认址可分为绝对认址和相对认址两种形式,绝对认址因其认址准确可靠的优点而成为目前堆垛机普遍采用的认址方法。
绝对认址的实现方式主要有三种:编码器认址、激光测距认址和BPS(条形码定位)认址。
相对应的定位系统即:编码器定位系统、激光测距定位系统和条形码定位系统。
图1-2单立柱巷道堆垛机三维模型图目前编码器认址的最大问题是走行轮在地轨上打滑而导致编码器出现计数错误,严重影响测量精度,从而降低堆垛机的可靠性。
如果采用认址片加以校验,会改善这方面的情况,但堆垛机的运行速度不能太高,一般在120m/min以下,从而制约了堆垛机的运行效率。
激光测距定位控制系统提高了堆垛机定位的可靠性,同时提高了堆垛机的运行效率,是目前应用最广泛的技术,但其对安装和使用的要求较高,并且由于光线直线传播的固有特性,它只能在直线轨道中应用。
直到德国乐易电子于2005年推出了一项具有创新性的新技术—BPS(Barcode Positioning System)条形码定位系统。
这种新型条形码定位系统(BPS)通过读取行进路线上的条形码确定准确方位。
可有效实现直线定位和曲线定位,并且测距围可达到10000米,为用户实现全自动化管理提供了必要前提。
BPS定位系统在自动化立体仓库中的应用表明,该系统使用简单,反应速度快,重复定位精度高,抗震性强,是一种较好的曲线定位解决方案。