西威变频器设置详解
超级西威变频器说明书
超级西威变频器说明书超级西威变频器说明书1、引言本文档是超级西威变频器的说明书,旨在向用户提供关于产品的详细信息和操作指南。
请在使用该产品之前仔细阅读本文档,并按照指示正确操作。
2、产品概述超级西威变频器是一种高效节能的电气设备,用于控制电机的速度和转矩。
它采用先进的变频技术,提供稳定可靠的性能,广泛应用于工业生产和机械控制领域。
3、技术规格3.1 输入电源超级西威变频器适用于三相交流电源,电压范围为220V - 480V,频率范围为50Hz - 60Hz。
3.2 输出能力超级西威变频器的输出能力根据型号不同而异。
以下是部分型号的输出能力示例:- 型号A: 最大输出功率为5kW,最大输出电流为10A。
- 型号B: 最大输出功率为10kW,最大输出电流为20A。
3.3 控制方式超级西威变频器支持多种控制方式,包括手动控制、本地控制和远程控制。
用户可以根据需求选择适合的控制方式。
4、安装与调试4.1 安装步骤- 步骤1、将超级西威变频器固定在安装板上,确保牢固可靠。
- 步骤2、连接输入电源和输出负载,按照正确的接线图连接电缆和导线。
- 步骤3、根据实际情况设置参数,并进行电气连接和地线接地。
4.2 调试指南- 指南1、确保输入电源和输出负载连接正确,避免电气短路或负载过载。
- 指南2、根据实际需要调整超级西威变频器的控制参数,以满足所需的速度和转矩要求。
- 指南3、在调试过程中,注意安全操作,并随时监测电压、电流和温度等参数,确保设备正常运行。
5、使用说明5.1 启动与停止- 启动: 将输入电源接通,按下启动按钮,超级西威变频器将开始工作。
- 停止: 按下停止按钮,超级西威变频器将停止输出并断开电源。
5.2 参数调整- 参数1、输出频率调整,可根据实际需求调整变频器的输出频率。
- 参数2、加速和减速时间调整,可根据要求设置变频器的加速和减速时间。
- 参数3、故障保护设置,可设置变频器的故障保护功能,以应对不同情况的故障。
西威变频器参数设置思维流程
西威变频器参数设置思维流程1开始;上电进入STARTUP按确认进入Startup Config Eenter steup mode进入基本菜单2变频器设置;确认Drive data确认进入变频器数据设置检查,设置完成后按返回3电机数据设置;在按下翻键进入Motor data菜单设置电机铭牌参数,设置完成后按按返回退出steup mode下翻进入AUtotune电机自学习4电机自学习;进入AUtotune(电机自学习)下翻到CurrReg start?确认键到CurrReg Press I Kye 按变频器运行键(输出继电器闭和,有使能信号)自学习完成后。
按返回两次推出菜单按确认然后再退出机械数据设置;在按下翻键进入startup config mechanical data(机械数据)菜单设置完成后返回键(GEarbox ratio 减速比),(PULLEY曳引轮直径),(FULL scale speed 电机额定转速),(Bu Control 制动电阻参数设置)5编码器配置;然后下翻到startup config Encoders config 菜单进行编码器类型配置设置完成以后按返回键速度环调准基准植;REGULATIO NPARAM/spd regulatar/spd regulatar values(无齿曳引电机需调节到最大)按SHIFT 再按HELP键可调出基准植6制动电阻参数设置;在下翻到startup config BUprotection设置制动单元电阻参数按返回退出键Encode Config 在按STARTUP config 确认保存参数7机械数据设置;在按下翻键进入startup config mechanical data(机械数据)菜单设置完成后返回键8编码器自学习;进入SERVICE菜单确认进入SERVICE insert password 输入密码确认后下翻到REGULATION PARAM确认到Flux config 确认到Magnetiz config 确认到Autophasing rot start?下翻到Autophasing still start?确认键(开启输出继电器变频器使能信号)学习完成后按返回键到REGULATION PARAM SA VE PARAMETERS 检修,爬行,额定速度设置;TRA VEL/Speed/profile (Mulit Speed1检修速度,)Mulit Speed Mulit 2爬行速度,Mulit Speed3额定速度)都以实际控制要求设置10保存所有参数;依次进入各级STARTUP/startup config/Save config 然后按确认键保存10多段速设置;TRA VEL/Ramp profile 根据电梯实际调节控制要设置11电梯时序设置;TRA VEL/ Lift sequence12 PI植设定(增益菜单设置);TRA VEL/ Speed reg giansTRA VEL(传输菜单)(1)Speed Profile;(1m/s时的多段速度设置)Multi speed 2 100 HZMulti speed 3 980HZMulti speed 4 200HZ(2)Ramp profileMr0 acc ini jerk 500 开始加速时加速度Mr0 acceleration 700 加速度Mr0 acc end jerk 800 结束加速度时速度Mr0 dec ini jerk 600 开始减速时减速度Mr0 deceleration 700 减速度Mr0 dec end jerk 500 结束减速时减速度Mr0 end decel 300 结束运行时的减速度。
博林特西威变频器调试指南

博林特西威变频器调试指南公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]西威变频器调试指南一、P/I值的说明A、P/I原理通过现场调试发现很多用户对P/I值的理解很是模糊,现将本人对P/I值的理解做以说明。
传统的闭环控制方式为PID调节 P比例调节 I积分调节 D微分调节风机泵类的控制通常采用PI调节,电梯的应用也是PI调节。
P/I的调节是单独起作用的,P能够对偏差做出及时响应,P越大则给定速度与反馈速度之间的差值越小,也就是说精度越高。
对于电梯的应用就体现为对设定速度的变化做出及时响应,如果在轿厢内感觉速度变化感觉很明显,有波浪样的感觉,通过调整P值可起作用。
但是如果P太大了,要求精度太高,会造成震荡,所以引入积分环节I消除系统震荡,I使给定信号的变化与乘积P*( 给定速度-反馈速度)对时间的积分成正比,使得给定信号的变化只能在“积分时间内“逐渐的增大(或减小),从而减缓了给定速度的变化速度,防止了震荡,对于电梯应用既体现为对通过P做出响应的速度精度进行调解,如果在轿厢内有细碎频繁的抖动,通过调节I值可起作用,有时候频繁细碎的抖动是由于I值过小导致的(西威变频器的I与普通意义的I的作用相反,I越大越可能震动)。
如果增大I值还有震动,适当减小P。
同时应该判断是高、中、低哪一个速度段效果不好,从而调节相应速度段的P/I .D微分环节,是根据偏差变化率的大小,提前给出一个相应的调节,从而缩短了调解时间,克服了积分时间太长而使恢复滞后的缺点。
对于转速闭环控制,由于机械特性本来就比较硬,转速偏差不会很大,所以P不必太大,由于系统要求电机的转速能够在短时间内迅速恢复,所以积分时间不允许很长。
B、西威变频器P0/I0 P1/I1 P2/I2 P3/I3的具体说明P0电梯启动时的比例增益,I0电梯启动时的积分,P1高速段的比例增益,I1高速段的积分,P2中速段的比例增益,I2中速段的积分,P3低速段的比例增益,I3低速段的积分,作用见P/I原理说明。
西威变频器调试中文手册80-99页
0
1
Multi speed 5
1
1
0
Multi speed 6
1
1
1
Multi speed 7
TAV3i011
按 左键退出速度曲线菜单
AVyL变频器允许设置如下图所示的斜坡曲线
94·第7章键盘实施指令ARTDriveL使用手册
按 键设置“开始加速时的急加速度”参数,按 键确认
按 键设置“加速度”参数,按 键确认
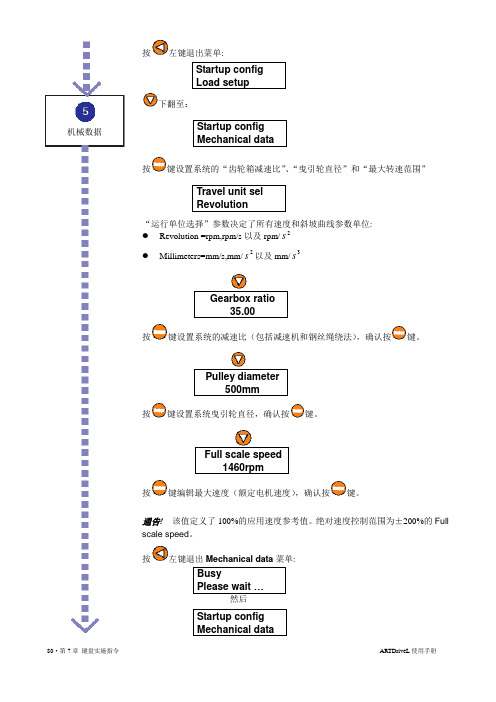
按 键设置系统曳引轮直径,确认按 键。
按 键编辑最大速度(额定电机速度),确认按 键。
通告!该值定义了100%的应用速度参考值。绝对速度控制范围为±200%的Full scale speed。
按 左键退出Mechanical data菜单:
然后
80·第7章键盘实施指令ARTDriveL使用手册
对于编码器类型配置按以下步骤:
例:如果额定速度144rpm,设置为0.03125 rpm(见表)
速度方案
(速度参考/反馈方案)
最大转速值
0.125 rpm
2048 rpm
0.25 rpm
4096 rpm
0.5 rpm
8192 rpm
1 rpm
16384 rpm
0.03125 rpm
512 rpm
按 键确认选择
按 左键变频器显示:
ARTDriveL使用手册第7章键盘实施指令·93
Mtl spd sel
2src
Mtl spd sel
1src
Mtl spd sel
0src
激活速度
0
0
0
Multi speed 0
0
0
1
西威变频器使用说明
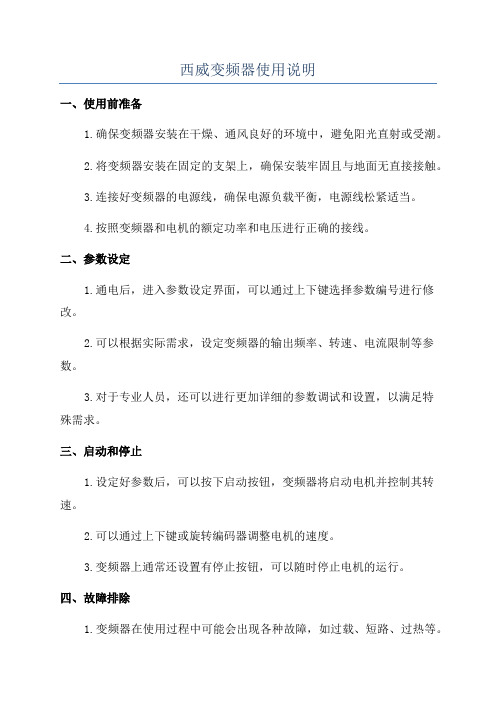
西威变频器使用说明一、使用前准备1.确保变频器安装在干燥、通风良好的环境中,避免阳光直射或受潮。
2.将变频器安装在固定的支架上,确保安装牢固且与地面无直接接触。
3.连接好变频器的电源线,确保电源负载平衡,电源线松紧适当。
4.按照变频器和电机的额定功率和电压进行正确的接线。
二、参数设定1.通电后,进入参数设定界面,可以通过上下键选择参数编号进行修改。
2.可以根据实际需求,设定变频器的输出频率、转速、电流限制等参数。
3.对于专业人员,还可以进行更加详细的参数调试和设置,以满足特殊需求。
三、启动和停止1.设定好参数后,可以按下启动按钮,变频器将启动电机并控制其转速。
2.可以通过上下键或旋转编码器调整电机的速度。
3.变频器上通常还设置有停止按钮,可以随时停止电机的运行。
四、故障排除1.变频器在使用过程中可能会出现各种故障,如过载、短路、过热等。
2.如果出现故障,首先应按下停止按钮,切断电源,等待变频器冷却后再检查。
五、注意事项1.在使用变频器前,请仔细阅读使用手册,了解其特性和使用方法。
2.在设定参数时,应按照实际情况进行调整,避免超载或过热的情况发生。
3.变频器应定期进行维护和检查,以确保其正常运行和安全性。
4.在使用过程中,注意观察电机和变频器的运行情况,如有异常及时停止并检查。
六、使用技巧1.在设定转速时,可以先从低速开始,慢慢调整至需要的转速,以免电机突然启动造成损坏。
2.可以通过电流限制参数,保证电机工作时的电流不超过额定电流,防止设备烧毁。
3.如果需要频繁启停电机,可以使用变频器的快速停启功能,以减少启动时间和机械冲击。
综上所述,使用西威变频器需要先进行参数设定,然后可以通过启动按钮控制电机的运行。
在使用中要注意故障排除和维护保养,以延长变频器的使用寿命并确保使用安全。
西威变频器平层、抖动的操作方法

西威变频器操作方法
1.如何调电梯平层:
首先让变频器初次上电,它的显示屏会显示Monitor,然后在这个显示界面下操作:Monitor→按▽两次→按ENTER两次→按▽四次,然后界面会显示Multi speed 3,如果电梯平层出现上高下低,则减少该数值(例如:76改为66);如果电梯平层出现上低下高,则增加该数值(例如:76改为86)。
然后保存参数(以下第4)。
2.如何调电梯的抖动:
首先让变频器初次上电,它的显示屏会显示Monitor,然后在这个显示界面下操作:Monitor→按▽两次→按ENTER一次→按▽三次→按ENTER一次,然后界面会显示spdp1 gain:10%,把10%改为30%;按▽两次后,spdp2 gain:15%,把15%改为35%。
然后在轿厢里感觉一下抖动是否明显消除,如还有抖动,则再按上述方法加大此参数。
(注意:最大不能超过50%)。
然后保存参数(以下第4)。
3.如何看变频器故障代码:
首先让变频器初次上电,它的显示屏会显示Monitor,然后在这个显示界面下操作:Monitor→按ENTER一次→按△两次→按ENTER一次,然后界面会显示第一次故障(例如:Undervoltge为低电压故障),一直按▽,会看到所有故障。
4.如何保存参数
在当前修改好参数的界面下,按Escape键数次后,然后会显示Travel,再按△两次回到Monitor,Monitor→按▽一次→按ENTER一次→按△一次,然后界面会显示:save confige,按ENTER一次,参数就保存了。
水钢西威变频器操作指南
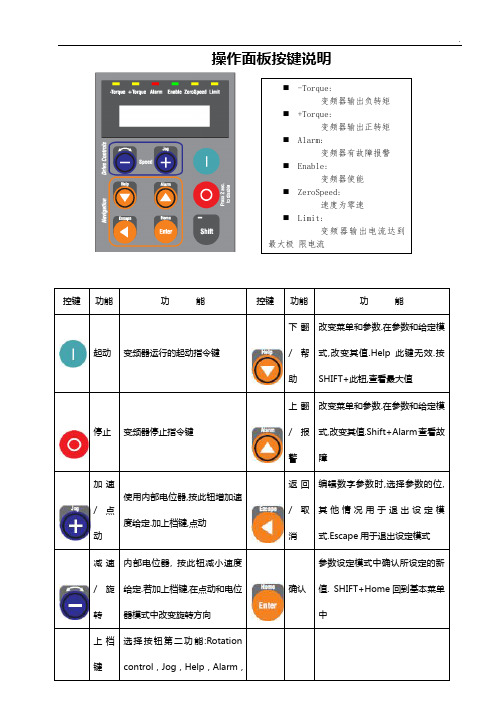
西威逆变器参数设置指南一、面板按键功能说明二、面板启停电机步步骤三、PLC启停电机步骤四、电机参数监视五、故障寄存器/故障复位六、故障列表一、面板按键功能说明控制键文本功能[Start] [启动] 按下START(启动)按钮可使能变频器(停止控制功能ON)并使其进入运行状态(Main commands(主命令)=DIGITAL(数字))。
当Main commands设定为TERMINALS(端子)时,按键无效。
[STOP] [停止] 当Main commands(主命令)设定为DIGITAL(数字)时,按下STOP(停止)按钮可使变频器从运行状态变为停止状态。
(按住该键2秒钟,变频器将被禁止)。
当Main commands(主命令)设定为TERMINALS(端子)时,按键无效。
[Increase]/[Jog] [加速]/[点动运行] 按下该键可增加电动机电位计功能的速度给定值。
当选择切换按钮时,启用点动运行命令。
[Decrease]/[Rotation control] [减速]/[方向控制] 按下该键可减少电动机电位计功能的速度给定值。
当选择切换按键时,旋转控制可改变点动运行方式和电动机的旋转方向。
[Down arrow]/[Help] [向下箭头]/[帮助] 向下箭头- 用于改变菜单或参数选择。
在参数和参考值设置方式中,可改变参数值或参考值。
帮助–该功能不可用(当按下该键且选择了切换键时,将显示“Help not found”。
)[Up arrow]/[Alarm] [向上箭头]/[报警] 向上箭头- 用于改变菜单或参数选择。
在参数和参考值设置方式中,它改变参数值或参考值。
报警- 故障寄存器显示(选择了切换键)。
利用UP(向上)/DOWN(向下)箭头滚动最近的10条报警信息。
[Left arrow]/[Escape] [左箭头]/[取消] 左箭头,当编辑数字参数时,用该键可选择要修改的参数的不同位。
西威变频器参数设置
西威变频器参数设置思维流程1开始;上电进入STARTUP按确认进入Startup Config Eenter steup mode进入基本菜单2变频器设置;确认 Drive data确认进入变频器数据设置检查,设置完成后按返回3电机数据设置;在按下翻键进入Motor data菜单设置电机铭牌参数,设置完成后按按返回退出steup mode下翻进入AUtotune电机自学习4电机自学习;进入AUtotune(电机自学习)下翻到CurrReg start 确认键到CurrReg Press I Kye 按变频器运行键(输出继电器闭和,有使能信号)自学习完成后。
按返回两次推出菜单按确认然后再退出机械数据设置;在按下翻键进入startup config mechanical data (机械数据)菜单设置完成后返回键 (GEarbox ratio 减速比),(PULLEY曳引轮直径),(FULL scale speed 电机额定转速),(Bu Control 制动电阻参数设置)5编码器配置;然后下翻到startup config Encoders config 菜单进行编码器类型配置设置完成以后按返回键速度环调准基准植;REGULATIO NPARAM/spd regulatar/spd regulatar values(无齿曳引电机需调节到最大)按SHIFT 再按HELP 键可调出基准植6制动电阻参数设置;在下翻到startup config BUprotection设置制动单元电阻参数按返回退出键Encode Config 在按STARTUP config 确认保存参数7机械数据设置;在按下翻键进入startup config mechanical data (机械数据)菜单设置完成后返回键8编码器自学习;进入SERVICE菜单确认进入SERVICE insert password 输入密码确认后下翻到REGULATION PARAM确认到Flux config 确认到Magnetiz config 确认到Autophasing rot start下翻到Autophasing still start确认键(开启输出继电器变频器使能信号)学习完成后按返回键到REGULATION PARAM SAVE PARAMETERS检修,爬行,额定速度设置;TRAVEL/Speed/profile (Mulit Speed1检修速度,) Mulit Speed Mulit 2爬行速度,Mulit Speed3额定速度)都以实际控制要求设置10保存所有参数;依次进入各级STARTUP/startup config/Save config 然后按确认键保存10多段速设置;TRAVEL/Ramp profile 根据电梯实际调节控制要设置11电梯时序设置;TRAVEL/ Lift sequence12 PI植设定(增益菜单设置); TRAVEL/ Speed reg giansTRAVEL(传输菜单)(1)Speed Profile;(1m/s时的多段速度设置) Multi speed 2 100 HZMulti speed 3 980HZMulti speed 4 200HZ(2)Ramp profileMr0 acc ini jerk 500 开始加速时加速度Mr0 acceleration 700 加速度Mr0 acc end jerk 800 结束加速度时速度Mr0 dec ini jerk 600 开始减速时减速度Mr0 deceleration 700 减速度Mr0 dec end jerk 500 结束减速时减速度Mr0 end decel 300 结束运行时的减速度。
西威变频器设置详解
操作面板按键说明控键功能功能控键功能功能起动变频器运行的起动指令键下翻/帮助改变菜单和参数.在参数和给定模式,改变其值.Help此键无效.按SHIFT+此钮,查看最大值停止变频器停止指令键上翻/报警改变菜单和参数.在参数和给定模式,改变其值.Shift+Alarm查看故障加速/点动使用内部电位器,按此钮增加速度给定.加上档键,点动返回/取消编辑数字参数时,选择参数的位,其他情况用于退出设定模式.Escape用于退出设定模式减速/旋转内部电位器, 按此钮减小速度给定.若加上档键,在点动和电位器模式中改变旋转方向确认参数设定模式中确认所设定的新值. SHIFT+Home回到基本菜单中上档键选择按钮第二功能:Rotationcontrol,Jog,Help,Alarm,⏹-Torque:变频器输出负转矩⏹+Torque:变频器输出正转矩⏹Alarm:变频器有故障报警⏹Enable:变频器使能⏹ZeroSpeed:速度为零速⏹Limit:变频器输出电流达到最大极限电流恢复出厂值:进入STARTUP/STARTUP Config/Load default菜单,按回车,保存参数方法:进入STARTUP/Save config菜单,按回车变频器调试步骤:Menus:(一级目录)1. MONITOR(监控)2. STARTUP(启动)3. TRAVEL(驱动)4. REGULATION PARAM(调节参数)5. I-O CONFIG(I-O配置)6. ALARM CONFIG(报警配置)7. COMMUNICATION(通讯)8. APPL CARD CONFIG(APPL卡配置)9. CUSTOM FUNCTIONS(客户功能)10. SERVICE(服务功能:无齿自动定位用)第一步:变频器自学习1.在设置或修改驱动器或电机参数后再进行自学习。
参数名称单位设定值备注启动菜单/调节模式/调节模式SARTUP/Regulation mode/Regulation modeFieldoritented面向现场Escape, Home启动菜单/启动菜单配置/进入安装模式SARTUP/Startup config/EnterSetup mode2.由于转子是永磁的,不需要进行磁场自学习,只进行电流自学习。
西威变频参数设置
17
LIMITS>speed amount>speed max amount(最大的速度,可不设)
850pmr
18
BASIC MENU>save parameter>(保存参数)
19
DRIVE PARAMETER>motor parameter>self turning>
Self trun1>self part1>self part1? >enable>
0
40
BASIC MENU>acc delta speed(加速斜坡速度)
100rpm
41
BASIC MENU>acc delta tim(加速斜坡时间)
1s
42
BASIC MENU>dec delta speed(减速斜坡速度)
100rpm
43
BASIC MENU>dec delta tim(减速斜坡时间)
735rpm
14
CONFIGURATION>full load current(最大的电机电流)
364A
15
CONFIGURATION>regulation model>V/f control>(v/f控制 电压/频率)
16
LIMITS>speed amount>speed min amount(最小的速度,可不设)
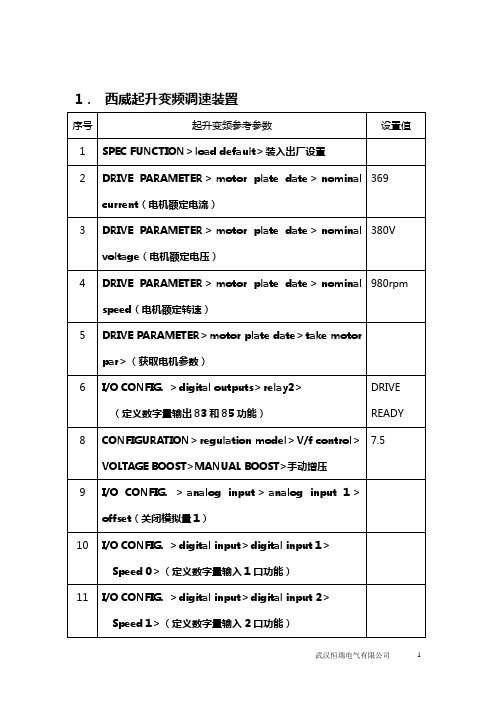
1.西威起升变频调速装置
序号
起升变频参考参数
设置值
1
SPEC FUNCTION>load default>装入出厂设置
2
DRIVE PARAMETER>motor plate date>nominal current(电机额定电流)
369
3
DRIVE PARAMETER>motor plate date>nominal voltage(电机额定电压)
西威变频器设置详解

西威变频器设置详解操作面板按键说明, -Torque:变频器输出负转矩, +Torque:变频器输出正转矩, Alarm:变频器有故障报警, Enable:变频器使能, ZeroSpeed:速度为零速, Limit:变频器输出电流达到最大极限电流控键功能功能控键功能功能下翻改变菜单和参数.在参数和给定起动变频器运行的起动指令键 /帮模式,改变其值.Help此键无效.助按SHIFT+此钮,查看最大值上翻改变菜单和参数.在参数和给定停止变频器停止指令键 /报模式,改变其值.Shift+Alarm查警看故障加速返回编辑数字参数时,选择参数的位,使用内部电位器,按此钮增加速/点/取其他情况用于退出设定模度给定.加上档键,点动动消式.Escape用于退出设定模式内部电位器, 按此钮减小速度减速参数设定模式中确认所设定的新给定.若加上档键,在点动和电/旋确认值. SHIFT+Home回到基本菜单中位器模式中改变旋转方向转选择按钮第二功能:Rotation上档control~Jog~Help~Alarm~键Escape, Home恢复出厂值:进入STARTUP/STARTUP Config/Load default菜单,按回车~保存参数方法:进入STARTUP/Save config菜单~按回车变频器调试步骤:Menus:(一级目录)1. MONITOR(监控)2. STARTUP(启动)3. TRAVEL(驱动)4. REGULATION PARAM(调节参数)5. I-O CONFIG(I-O配置)6. ALARM CONFIG(报警配置)7. COMMUNICATION(通讯)8. APPL CARD CONFIG(APPL卡配置)9. CUSTOM FUNCTIONS(客户功能)10. SERVICE(服务功能:无齿自动定位用)第一步:变频器自学习1( 在设置或修改驱动器或电机参数后再进行自学习。
参数名称单设定值备注位启动菜单/调节模式/调节模式 Field 面向现场SARTUP/Regulation mode/Regulation mode oritented 启动菜单/启动菜单配置/进入安装模式SARTUP/Startup config/EnterSetup mode参数名称单位设定值备注变频器数据/主电压Drive data/Mains voltage v 变频器数据/外界温度Drive data/Ambient temp ? 变频器数据/开关频率Drive data/Switching freq KHZ 变频器数据/速度参考/反馈 Drive data/Spd ref/fbk res rpm 电机数据/额定电压Motor data/Rated voltage V 电机数据/额定电流Motor data/Rated curren A 电机数据/额定速度Motor data/Rated speed rpm 电机数据/额定频率Motor data/Reted frequency KW 电机数据/功率因数Motor data/Cosfi 电机数据/电机效率Motor data/Efficiency 电机数据/电机参数Load default mot 参数名称单位设定值备注调节参数/速度调节器/基准值/速度比例增益基准值 A/rpm 默认启动和停车震REGULATION PARAM/Spd regulator/Base values/SpdP base value 动调节调节参数/速度调节器/基准值/速度积分增益基准值 A/rpm 默认 REGULATION PARAM/Spd regulator/Base values/SpdI base value2(由于转子是永磁的~不需要进行磁场自学习~只进行电流自学习。
西威SIEIADL变频器调试说明

SIEI变频器调试说明-ADL200一、变频器操作面板说明二、变频器端口功能说明三、可插拔端子(控制回路)分配功能说明四、Heidehain(海德汉)ERN 1387插针分布图与分频接线图五、菜单与调试参数一、变频器操作面板说明BRK 抱闸信号CNT 运行信号EN 变频器使能信号LIM 变频器输出电流达到最大极限电流A-0 零速AL 变频器有故障报警ESC 返回、取消SAVE 保存FIND 参数代码RST 设置报警CUST 显示10参数修改DISP 显示某个目录下的驱动运行参数E 确认▲上翻▼下翻►左翻◄右翻二、变频器端口功能说明L1,L2,L3变频器的输入线U,V,W变频器的输出线+BR1,C 接制动电阻9Enable)使能信号8(FWD)正转7(REV)反转12(COM)公共端5(SPD1)多段速0 4(SPD2)多段速1 3(SPD3)多段速256、57(DRIVE OK)故障输出(标准,可更改)54、55(BRAKE)抱闸检测输出(标准,可更改)端子与接线说明一、主线路注意事项1、制动电阻应接在BR1和C之间,不能接在C和D或者D和BR1之间,如果接错会损坏变频器2、主线路端子在接线时要拧紧,不然会影响变频器和电机性能,容易产生故障.控制线路注意事项采用变频器内部24V时,需要将变频器11、12端子接入回路。
当曳引机在安装与设计相反时,如果要调换方向需要将13,14调换的同时,微机板上A+与A-、B+与B-也要调换。
3接线端子定义可以参考下面接线图端子端子功能最大值L1、L2、L3 交流进线电压230-15% 460+15% BR1、C 制动单元C1、D 直流母线电压连线770VDC/1.65 输出电流U、V、W 电机连接线三、可插拔端子(控制回路)分配功能说明Terminals StripX1 FunctionT1 1 / /2 BrakeFble 抱闸反馈信号四、Heidehain(海德汉)ERN 1387插针分布图与分频接线图制动电阻选型实际选用制动电阻时,该表为10% ED的计算值。
西威AVY变频器参数简单设置简明版
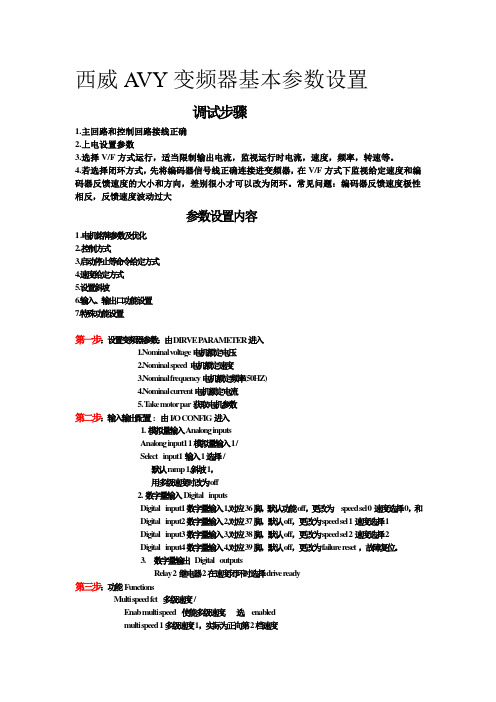
西威A VY变频器基本参数设置调试步骤1.主回路和控制回路接线正确2.上电设置参数3.选择V/F方式运行,适当限制输出电流,监视运行时电流,速度,频率,转速等。
4.若选择闭环方式,先将编码器信号线正确连接进变频器,在V/F方式下监视给定速度和编码器反馈速度的大小和方向,差别很小才可以改为闭环。
常见问题:编码器反馈速度极性相反,反馈速度波动过大参数设置内容1 .电机铭牌参数及优化2..控制方式3.启动停止等命令给定方式4.速度给定方式5.设置斜坡6.输入、输出口功能设置7.特殊功能设置第一步:设置变频器参数:由DIR VE P ARAMETER进入1.Nominal voltage电机额定电压2.Nominal speed 电机额定速度3.Nominal fr equency电机额定频率(50HZ)4.Nominal current电机额定电流5. T ake motor par获取电机参数第二步:输入输出配置 : 由 I/O CONFIG进入1. 模拟量输入Analong inputsAnalong input1 1模拟量输入1 /Select input1 输入1选择 /默认ramp 1,斜坡1,用多级速度时改为off2. 数字量输入 Digital inputsDigital input1数字量输入1,对应36脚,默认功能off,更改为 speed sel 0 速度选择0,和 Digital input2数字量输入2,对应37脚,默认off,更改为speed sel 1 速度选择1Digital input3数字量输入3,对应38脚,默认off,更改为speed sel 2 速度选择2Digital input4数字量输入4,对应39脚,默认off,更改为failur e r eset ,故障复位。
3.数字量输出 Digital outputsRelay 2 继电器2在速度闭环时选择drive r eady第三步:功能 FunctionsMulti speed fct 多级速度 /Enab multi speed 使能多级速度, 选 enabledmulti speed 1多级速度1,实际为正向第2档速度multi speed 2多级速度2,实际为正向第3档速度multi speed 3多级速度3,实际为正向第4档速度multi speed 4多级速度4,实际为反向第1档速度multi speed 5多级速度5,实际为反向第2档速度multi speed 6多级速度6,实际为反向第3档速度multi speed 7多级速度7,实际为反向第4档速度附:由基本菜单BASIC MENU 进入Ramp ref 1 斜坡参考值1,实际为正向第一档速度Brake unit 制动装置(55kw电机及以下需开启制动单元)Enable BU启用制动单元,默认是disabled关闭的,开启需更改为Enable 第四步:由基本菜单BASIC MENU 进入Acc delta speed 加速斜率速度Acc delta time 加速斜率时间Dec delta speed 减速斜率速度Dec delta time 减速斜率时间第五步:由基本菜单BASE MENU 进入Regulation mode 调节方式V/F control V/F电压频率控制(速度开环)Field oriented 磁场定向控制,(速度闭环)由变频器参数DRIVE PARAMETER 进入V/F control V/F电压频率控制Voltage boost 电压补偿,即增压Manual boost 手动增压一般为电机额定电压的5%-8%左右由configuration进入magn ramp time由默认的1s改为0.3-0.5s第六步:自学习前:由配置CONFIGURATION进入main commands将terimals改为digital 自学习:由变频器参数DIRVE PARAMETER 进入Motor parameter 电机参数/Self-tuning 电机自动优化/Self-tune1 自动优化1进入start part1然后进入take val part1选择measur sat2b…Self-tune 2a 自动优化2a(不用)Self-tune 2b 自动优化2b进入start part2b然后进入take val part1选择measur sat2b…自学习后: 由配置CONFIGURATION进入main commands将digital改为terimals 第七步:从基本菜单BASIC MENU 进入Save parameters 进行以上所设定的参数保存。
西威变频操作方法
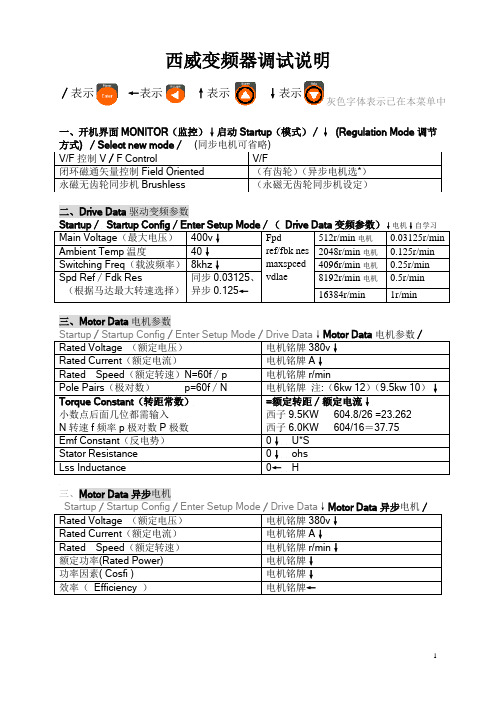
西威变频器调试说明一、开机界面MONITOR (监控)↓启动Startup (模式)∕↓ (Regulation Mode 调节二、Drive Data 驱动变频参数三、Motor Data 电机参数三、Motor Data 异步电机∕表示 ←表示 ↑表示 ↓表示灰色字体表示已在本菜单中四、(Autotune)同步电流自学习:Startup∕Startup Config∕Enter Setup Mode∕Motor Data电机参数↓1 Autotune 自学习∕CurrReg START? 电流自学习/ CurrReg Press I Key (注:先主接触器合、制动器打开、使能给出12#与19#短接),后按I键, (观察曳引轮方向与电梯方向一致,或面对编码器顺时针方向转,显示从0%~80-100%变化,同时主机会振动)等显示Autotune End自学习成功结束∕显示CurrReg Press I Key←CurrReg start? ←Autotune←load setup? yes→end no→esc∕load setup? yes→end no→esc←退出到save Config?∕显示Busy please maie···save Config?等保存后撤使能←显示startup↑MONITOR,此时变频器可能报故障因机械参数编码器类型等未设。
(Autotune)异步自学习:Startup∕Startup Config∕Enter Setup Mode∕Motor Data电机参数↓5 Autotune 自学习∕Complete Still 静态磁通自学习autotune Start?↓Complete Rot 动态磁通自学习autotune Start?∕(建议采用)Press I Key (注:制动器打开、主接触器合、使能给出12#与19#短接),后按I键, 等显示Autotune End自学习成功∕结束←退出到save Rate?∕等保存后撤使能←显示startup↑MONITOR五、(MECHANICAL DATA设置机械参数)六、(Weights轿厢设置)七、Encoders Config设置编码器参数(定位必须)九、同步电机用(基值):开机界面MONITOR(监控)↑Service(密码)∕Insert Passsword(请输入密码)∕12345∕←…Service↓4 Regulation Param(调节增益和控制以数)∕SPD REGULATOR∕↓…BASE VALUES(基值)∕SPDP BASE VALUE (经验值13A∕RPM)SPDI BASE VALUE (经验值1149A∕RPM)…(shift↓最大值如此值较小,则自学习没成功)注:(基值)大功率机器设大一点(异步电机使用默认值)十、Magnnetrz Config(同步电动机)编码器定位:开机界面MONITOR(监控)↑Service(密码)∕Insert Passsword(请输入密码)∕(12345)18622∕←…Service↓4 Regulation Param∕↓4 Flux Config∕Magnnetrz Config∕Autophasing Rot Sart?动态定位,Autophasing Still Sart?静态定位启动(注:制动器打开、主接触器合)按确认键,显示waiting Start……后,先给出使能紧接给出上方向(使能12#和上方向13#与19#短接),观察主机运行方向必须顺时针方向运转,显示0%~95-100%,等显示Autotune End编码器定位成功∕结束←3 Regulation Param↑2 Startup∕↑Save Config?∕等保存后撤使能方向←显示startup↑MONITOR。
西威变频器调试说明
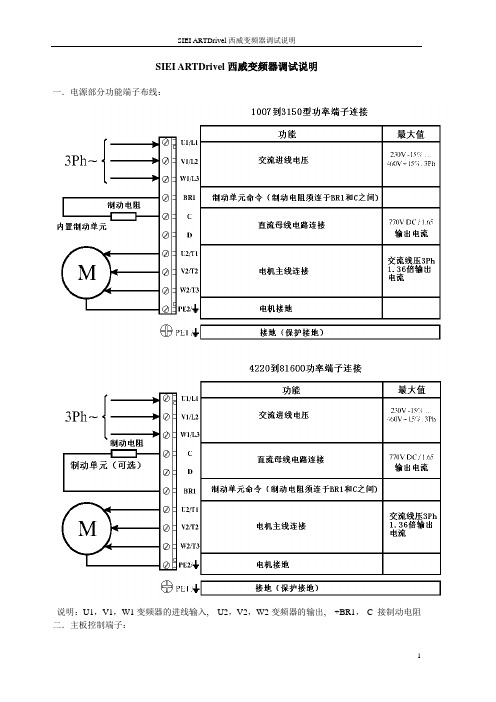
SIEI ARTDrivel西威变频器调试说明一.电源部分功能端子布线:说明:U1,V1,W1变频器的进线输入, U2,V2,W2变频器的输出, +BR1,-C 接制动电阻二.主板控制端子:说明:1,2模拟量输入端,12(ENERGE)使能信号13(FWD)正转,14(REV)反转,19(COM)公共端36(SPD1)多段速1,37(SPD2)多段速2 ,38(SPD3)多段速380,82(DRIVE OK)故障输出,83,85(BRAKE)抱闸检测输出编码器:XS插座,分频卡EXP-E上的XF0端子分频卡上的跳线S1,S2决定分频系数,1分频(S1-OFF,S2-OFF),2分频(S1-OFF,S2-ON),4分频(S1-ON,S2-OFF),8分频(S1-ON,S2-ON)编码器尽量选用海德汉的1387型号,海德汉ERN1387正余弦增量型编码器与西威SIEI变频器的接线图:三.菜单参数设置(举例):电机参数:曳引轮直径450mm,梯速2.5m/s,曳引比:2:1额定转速:96r/min 功率:17.4KW 电流16A反电势:260V 转矩:572 频率:19.2HZMenus:(一级目录)1. MONITOR(监控)2. STARTUP(启动)3. TRA VEL(驱动)4. REGULATION PARAM(调节参数)5. I-O CONFIG(I-O配置)6. ALARM CONFIG(报警配置)7. COMMUNICATION(通讯)8. APPL CARD CONFIG(APPL卡配置)9. CUSTOM FUNCTIONS(客户功能)10. SERVICE(服务功能:无齿自动定位用)三.目录MONITOR 监控菜单介绍:Drive status 驱动器状态在此菜单可以监控电梯运行时变频器的输出电压、电流、频率、功率、转矩、速度和内部的使能(Enable)命令等。
I-O status 输入输出状态在此菜单可以监控电梯运行时变频器各个模拟和数字输入输出口的状态。
西威 SIEI ADL变频器 调试说明

SIEI变频器调试说明-ADL200一、变频器操作面板说明二、变频器端口功能说明三、可插拔端子(控制回路)分配功能说明四、Heidehain(海德汉)ERN 1387插针分布图与分频接线图五、菜单与调试参数一、变频器操作面板说明BRK 抱闸信号CNT 运行信号EN 变频器使能信号LIM 变频器输出电流达到最大极限电流A-0 零速AL 变频器有故障报警ESC 返回、取消SA VE 保存FIND 参数代码RST 设置报警CUST 显示10参数修改DISP 显示某个目录下的驱动运行参数E 确认▲上翻▼下翻►左翻◄右翻二、变频器端口功能说明L1,L2,L3变频器的输入线U,V,W变频器的输出线+BR1,C 接制动电阻9Enable)使能信号8(FWD)正转 7(REV)反转12(COM)公共端5(SPD1)多段速0 4(SPD2)多段速13(SPD3)多段速256、57(DRIVE OK)故障输出(标准,可更改)54、55(BRAKE)抱闸检测输出(标准,可更改)端子与接线说明一、主线路注意事项1、制动电阻应接在BR1和C之间,不能接在C和D或者D和BR1之间,如果接错会损坏变频器2、主线路端子在接线时要拧紧,不然会影响变频器和电机性能,容易产生故障.控制线路注意事项采用变频器内部24V时,需要将变频器11、12端子接入回路。
当曳引机在安装与设计相反时,如果要调换方向需要将13,14调换的同时,微机板上A+与A-、B+与B-也要调换。
3接线端子定义可以参考下面接线图三、可插拔端子(控制回路)分配功能说明四、Heidehain(海德汉)ERN 1387插针分布图与分频接线图制动电阻选型实际选用制动电阻时,该表为10% ED的计算值。
而电梯应用的制动周期比较频繁,一般情况选用制动电阻的功率不得小于表中的功率,应该选择偏大些。
同步最好是选择变频器功率的30%。
比如15KW的变频器可以选择15×30%=4.5KW的制动电阻。
西威变频器参数设定
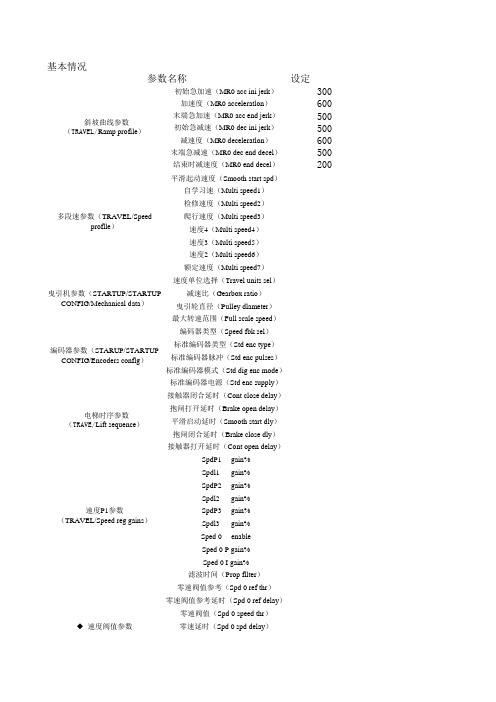
基本情况设定初始急加速(MR0 acc ini jerk )300加速度(MR0 acceleratlon )600末端急加速(MR0 acc end jerk )500初始急减速(MR0 dec ini jerk )500减速度(MR0 deceleratlon )600末端急减速(MR0 dec end decel )500结束时减速度(MR0 end decel )200平滑起动速度(Smooth start spd )自学习速(Multi speed1)检修速度(Multi speed2)爬行速度(Multi speed3)速度4(Multi speed4)速度3(Multi speed5)速度2(Multi speed6)额定速度(Multi speed7)速度单位选择(Travel units sel )减速比(Gearbox ratio )曳引轮直径(Pulley dlameter )最大转速范围(Full scale speed )编码器类型(Speed fbk sel )标准编码器类型(Std enc type )标准编码器脉冲(Std enc pulses )标准编码器模式(Std dig enc mode )标准编码器电源(Std enc supply )接触器闭合延时(Cont close delay )抱闸打开延时(Brake open delay )平滑启动延时(Smooth start dly )抱闸闭合延时(Brake close dly )接触器打开延时(Cont open delay )SpdP1 gain%Spdl1 gain%SpdP2 gain%Spdl2 gain%SpdP3 gain%Spdl3 gain%Sped 0 enableSped 0 P gain%Sped 0 I gain%滤波时间(Prop fllter )零速阀值参考(Spd 0 ref thr )零速阀值参考延时(Spd 0 ref delay )零速阀值(Spd 0 speed thr )零速延时(Spd 0 spd delay )◆ 速度阀值参数(TRAVEL/Speed threshold )速度P1参数(TRAVEL/Speed reg gains )参数名称斜坡曲线参数(TRAVEL/Ramp profile )多段速参数(TRAVEL/Speedproflle )曳引机参数(STARTUP/STARTUP CONFIG/Mechanical data )编码器参数(STARUP/STARTUP CONFIG/Encoders conflg ) 电梯时序参数(TRAVE/Lift sequence )阀值(SGP tran 21 h thr )阀值(SGP tran 32 thr )带宽(SGP tran 21 band )带宽(SGP tran 32 band )◆ 速度阀值参数(TRAVEL/Speed threshold )。
西威变频器说明书

西威变频器说明书ARTDrive L转矩矢量电梯专用变频器使用手册SIEI 操作手册安全须知注意!根据EEC标准,只有在检查确认机器是那些符合89/392/EEC条款的设备制造的后,Avy及其附件才可以使用。
警告-电气击伤和烧伤危险当时用某些仪器比如示波器去测量带电设备时,示波器的外壳必须接地,而且应使用差分放大输入。
在选择探头,调试示波器时应格外小心这样才能安全读数。
为进行正确操作及调试,仔细阅读仪器生产厂家的操作手册。
警告-火灾和爆炸危险火灾和爆炸通常是由把传动装置放置在危险的地方,比如充满易燃易爆气体或粉尘的地方。
传动装置应放置在远离危险的地方,即便使用那些可以在以上地点使用的电机。
警告-扭伤不正确的抬举方式可能造成严重的人身伤害。
只有经过培训的专业人员使用适当的装置进行以上操作才是可取的。
注意!传动装置的接地和电机的接地必须遵守标准。
警告在装置上电前把盖板放回原处。
否则可能导致死亡或严重伤害。
警告变频调速传动装置是用于工业现场安装的电气设备。
在使用过程中装置的部分是带电的。
因此,电气安装和设备的开盖操作应由合格的专业人员进行。
电机和传动装置的不正确安装将导致人身和设备的损坏。
传动装置本身未带电机超速保护。
必须严格遵守手册中的指示和当地及国家的有关适用规定。
小心且勿连接到超过技术指标允许的电压波动范围的供电电源上。
如果过高的电压加在传动装置上将有可能损坏内部器件。
小心没有接地导线的条件下切勿操作传动装置。
电机外壳的接地应使用一根区别于其他接地柱的接地柱,这样可以避免噪声耦合。
接地连线的截面积应符合NEC标准或CEC标准。
连接可以采用UL列出的或CSA认可的闭环端子连接,这样可使用相应的序列规格。
施工时应使用生产厂家认可的压弯工具。
小心不要在传动装置端子或控制电路端子上进行绝缘测试。
小心因为环境温度将影响装置的寿命和可靠性,所以不要在超出允许温度的地点安放装置。
在104°F(40℃)或以下温度时请保持通风。
西威变频器调试说明

西威变频器调试说明2级目录 STARTUP确认显示startupconfig—确认显示Enter setup mode-按下到Load default确认复出厂成功断电一次《变频器初始化》10级目录SERVICE-确认3次输入28622确认-按左健丨次-按下健到checkpassword-确认-按下到sizechange-确认按下健到sizeconfig-确认按下到seldrivesize-确认按下健改变电机功率后确认(必须新设电机功率)按左健一次再按下到Restart后按确认(修改编码器数)2级目录STARTUP确认到startupconfig-确认到Entersetupmode-按下健到Encodersconfig-确认按下健到stdencpulses确认改为2048确以并保存(电机自学习)短接变频器使能12-19号端子10级目录STARTUP确认按下健到startupconfig-确认按下健到entersetupmode-确认出现DRIVEDATA按确认出现400V~40~8KHZ~0。
03125-按左健一次再按下建到MOTRDATA确认-设定电机参数-380V~13。
2A~96RRM~极对数16~41。
44~EMF二0~V米S二0~OHM二0按左建一次按下健到Autotune按确认到start?确认显示pressiKey按I健电机学习开始学习结束显示end确认按左健一次到Loadsetupyes 确认(编码器自学习)进入密码后到REGULATIOIV-按确认再按下健到FIUXcomfig确认显示magnetizconfig确认显示start?按下健到still静态整定按确认再把14一12一19一号端子短通学习开始结束显示end确认并保存(修改输入端80和82)目录I/O CONIG确认一次按下键到digitaloutpots按确认到stddigouts按确认到sdtdigsyc按下键到stddigoutcfg按确认键显示End在按确认键选择inveyted按确认键并保存(修改计量单位)目录TRNVEL确认按下键到lifdsequence按上键到Dooaopenspeed按确认键修改参数设定值100确认并保存(速度调整)进入密码后到REGULATIONPALM按确认键两次,在按下键一次到spdpbasevaiue按shift后在按下键出现最大值,设定确认并保存(机械参数)目录STARTUP按确认两次在按下到mechanicaldata按确认键桉上下鍵到。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一.参数设置表及简要说明常用参数表
STARTUP
TRAEVL
TRAEVL/Lift sequence/
P比例调节I积分调节D微分调节
P能够对偏差做出及时响应,P越大则给定速度与反馈速度之间的差值越小,也就是说精度越高。
如果在轿厢内感觉速度变化感觉很明显,有波浪样的感觉,通过调整P值可起作用。
但是如果P太大了,要求精度太高,会造成震荡
I使给定信号的变化与乘积P*( 给定速度-反馈速度)对时间的积分成正比,使得给定信号的变化只能在“积分时间内“逐渐的增大(或减小),从而减缓了给定速度的变化速度,防止了震荡,对于电梯应用既体现为对通过P做出响应的速度精度进行调解,如果在轿厢内有细碎频繁的抖动,通过调节I值可起作用,有时候频繁细碎的抖动是由于I值过小导致的(西威变频器的I与普通意义的I的作用相反,I 越大越可能震动越大越可能震动)。
如果增大I值还有震动,适当减小P。
P0电梯启动时的比例增益,I0电梯启动时的积分,P1高速段的比例增益,I1高速段的积分,P2中速段
TRAN21 H THR=15%,15%是电机最高转速的15%,假设电梯最高转速是1米/秒,那么SGP TRAN21 H THR=15%*1米/秒=0.15米/秒,就是说速度达到0.15米/秒以后,速度的调节由高速段的P1/I1起作用
同样如果SGP TRAN32 H THR=4%*1米/秒=0.04米/秒,就是说,在电梯速度达到0.04米/秒后,速度的
零速阀值参考时间 3727 Spd 0 ref delay ms 500 变频系统刚默认为0速度了。
比如设定为5,那么5以下就是0速了。
参考值是用于变频器内部计算。
零速阀值 3724 Spd 0 speed thr rpm 2 零速延时 3725 Spd 0 spd delay ms 500 阀值 3706 SGP tran21 h thr %
95 分界高、中、低三个速度带的比例带宽。
21H 参数是分高中速的分界点。
32L 是中低速的分界点 阀值 3707 SGP tran32 I thr 5 带宽 3708 SGP tran21 band 4 分界点处PI 线性改变的带宽
带宽
3709 SGP tran32 band
4
REGULATION PARAM
速度PI 规划参数 详细说参见说明书P143 REGULATION PARAM/Spd regulator/Percent value/ 参数项 单位
设定数值 备注
速度P 基准值 2075 Spd P base value A/rpm
13 PI 作用基值,一般来说设定的越大越好调。
但是要根据曳引电机性能和编码器的分辨率来设定。
性能好分辨率高的可以适当设的大些。
速度 I 基准值
2077 Spd I base value
A/rmp
2000
注意事项1.如果参数设置乱了,可恢复出厂值:进入STARTUP/STARTUP Config/Load default 菜单,按回车,然后保存。
1:编码器的学习
A :在Service 菜单通过密码12345按确认,按
键退出,按
进入Regulation param 菜单,接着按
4次进入Regulation param/FLUX config ,按
进入Regulation param/FLUX
config/Magnetiz config ,按显示Autophase rot start or Autophase still start 中进行编码器
自动定位,如果选择是动态定位,则抱闸必须打开;如果选择是静态定位,则抱闸可以不用打开,可带负载学习。
当按了Autophase rot start or Autophase still start 自动定位后,然后给定方向和使能信号,注意:不能先给方向和使能信号Autophase rot start or Autophase still start 再按.定位结束后到Startup 菜单,进入Save config 进行保存定位结果.(此方式为3.5版本软件)。
B :建议在Service 菜单通过密码18622确认退出按键显示check passward 按
键之后通过
键
和
键找到Brushless 菜单按
显示Autophasing 中进行编码器自动定位。
当按了Autophasing 自
动定位后,然后给定方向和使能信号,注意:不能先给方向和使能信号再按Autophasing.定位结束后到Startup 菜单,进入Save config 进行保存定位结果。
(此方式为3.4版本软件) 2:关于电机的自学习步骤. 同步
1:进入Startup 菜单中的Startup config 按
键后,通过
和
键进入Encoders config 正确
设置编码器参数.
2:进入Startup 菜单中的Startup config 按
键后Enter setup mode As 后设置Drive data 和motor data,参数正确设置后,将使能信号12和19短接,输出接触器吸合,按Curr reg autotune 进行电流自学习.
3:自学习结束后将使能信号和输出接触器断开.
4:自学习结束后必须Load setup调用自学习的结果,然后在Startup菜单中的Save config保存参数.
1、起动过程的调整
加大TRA VEL / Speed reg gains/ Spd 0 P gain与TRA VEL / Speed reg gains/ Spd 0 I gain,一般Spd 0 I gain比Spd 0 P gain设的较大,直到起动不溜车为止,若设的太大会使系统产生震荡,若PI调的好可有效调整变频器的动态响应速度和稳速精度
2、起动时有震动,先判断震动产生在开闸之前还是在开闸之后,若在开闸之前则将TRA VEL / Lift sequence/ Brake open delay加大,在加大后若发生起动时电梯有向较重侧一沉的感觉时则加大Spd 0 I gain,若发生在开闸之后则相应减小Spd 0 I gain与Spd 0 P gain,若加大Spd 0 I gain时震动加大,但任无法解决起动时电梯向较重侧溜车则需逐步加大TRA VEL / Pre-torque/ Int Pre-torque值到此现象消失为止。
3、加速过程中的调整
调整TRA VEL / Ramp profile中的MR0 acc ini jerk、MR0 acceleration使起动加速度适中过大会产生失重感,但要使在单层运行时有额定速度出现,并保持一断时间(1S以上),若做不到时需将相应速度降低。
4、高速过程中的调整
在高速时存在垂直震动时则相应加大TRA VEL / Speed reg gains/ Spd 3 P gain、Spd 3 I gain若太大时会加大电机电流噪音,必要时适当减小REGULATION PARAM / Curr regulator / Percent values/ CurrP gain。
5、减速过程中的调整
RA VEL / Ramp profile中的MR0 deceleration、MR0 dec end jerk使电梯跑单层与多层时都有较短的爬行距离,但要能看到稳定的爬行1S以上,必要时调整控制器的减速距离。
6、平层精度的调整
整TRA VEL / Speed profile的爬行速度来调整平层精度,若上高下低则减小爬行速度,若上低下高则加大爬行速度(在以精确调好平层插板的基础上调整)
7、停车的调整
若停车后感觉向下一层,则相应加长控制器上的抱闸关闭延时,或加高零速参考值TRA VEL / Speed threshold/ Spd 0 speed thr,若在爬行时就有震动感,则相应减小零速参考值TRA VEL / Speed threshold/ Spd 0 speed thr。