TZID(v30)安装及操作说明书
威科达运动控制器 6 系列安装指南说明书
目录目录第一章产品检查及注意事项 (1)1.1开箱检查 (1)1.2运动控制器的型号说明 (1)1.3运动控制器的外形示意图 (2)1.4运动控制器储存环境 (2)1.5运动控制器使用环境 (2)1.6运动控制器的使用注意事项 (3)1.6.1安全注意事项 (3)1.6.2设计方面注意的事项 (3)1.6.3接线方面的注意事项 (3)1.6.4启动、维护时的注意事项 (4)1.6.5废弃时的注意事项 (4)1.7运动控制器的安装注意事项 (4)1.7.1运动控制器的安装方式 (4)1.7.2运动控制器的拆卸 (5)1.7.3运动控制器的摆放 (5)第二章产品介绍 (6)2.1术语与解释 (6)2.2威科达运动控制器简介 (6)2.3典型系统连接图 (7)2.4运动控制器接线端口说明 (7)第三章端子说明及配线 (10)3.1端子定义说明 (10)3.1.1数字IO跳线选择 (10)3.1.2数字量输入接线 (10)3.1.3数字量输出接线 (11)3.1.4RS-232(COM1)接口定义 (12)3.1.5RS-485接口定义 (12)目录3.1.6系统24V供电接口定义 (13)3.1.7数字IO供电接口定义 (13)3.1.8轴接口定义 (14)3.1.9模拟量输入定义 (16)3.1.10模拟量输出定义 (16)3.2运动控制器与伺服驱动器的连接 (17)3.2.1威科达伺服驱动器 (17)3.2.2台达伺服驱动器 (18)3.2.3三菱伺服驱动器 (19)3.2.4富士伺服驱动器 (20)3.2.5松下伺服驱动器 (21)3.2.6安川伺服驱动器 (22)第四章附录 (23)附录一:安装尺寸 (23)附录二:扩展模块概述 (26)第一章产品检查及注意事项第一章产品检查及注意事项1.1开箱检查感谢您选用威科达运动控制器!为了防止产品在购买与运输过程中的疏忽,请仔细检查下列项目:查看产品的铭牌是否与外包装一致;检查产品外观是否有划伤或者机械损伤;查看产品清单,核对配件是否齐全;轻摇机箱,查看内部是否有异物。
智能仪表设置说明书V30
说明
字符
说明
PASd
密码
Conn
通讯
Put
输入密码
Addr
仪表地址
ChAg
修改密码
bAud
波特率
SEt
设置
dAtA
数据格式
Ct
CT 变比
n.8.1
数据位 8,停止为 1,无校验位
Pt
PT 变比
E.8.1
数据位 8,停止为 1,偶校验
o.8.1
数据位 8,停止为 1,奇校验
2
智能仪表设置 V3.0
3.3 编程菜单流程 编程菜单操作 St 键进入下一级,Bs 键返回上一级并保存设置,Up 键、Dn 键同级菜单循环切换
2) 显示三相电流
4
智能仪表设置 V3.0
3)有功、无功、视在功率
4)显示频率、
5
智能仪表设置 V3.0
5)显示功率因数 3.5 编程状态设置操作说明 3.5.1 密码输入及修改
在进行设置操作之前必须先进入编程模式。在仪表处于正常测量状态时,按下“St”键即进入 编程状态,电表显示“PSd”:
再按一次“St”键,电表显示“PUt”, 此时,按“Up”或“Dn”键可选择输入密码或更改密码:
操作 读取指定寄存器开始的一个或多个数据 把设置的单个数值写入指定的寄存器 把设置的数值写入指定的是 1(功能码>127),则表明从机没有响应操作或发送出错。
数据区:
数据区是根据不同的功能码而不同。数据区可以是实际数值,设置点,主机发送给从机或从机 发送给主机的地址。数据区包含需要从机执行什么动作或由从机采集的返送信息,这些信息可以是
数值、参考地址等等。例如,功能码告诉从机读取寄存器的值,则数据区必须包含要读取的寄存器 的起始地址及读取长度。如果功能码告诉从机设置某些连续寄存器的值,则数据区还要包含这些数 值。对于不同的从机,地址和数据信息可能都不相同。 校验码:
PDA安装手册-V3版
广东盘古信息科技有限公司IMS-V3 PDA安装手册V1.0Jeco Pan2014/12/23[此文档仅使用于IMS-V3平台的PDA系统的安装与设置,未得到盘古信息方允许,不得复制与发行。
]目录目录 (1)1.驱动安装 (2)2.搭建运行环境 (2)2.1 复制初始化软件到PDA (2)2.2 安装IMS-PDA系统 (2)3.PDA设置 (3)3.1 快捷键设置 (3)3.2 WLAN SWC设置 (4)3.3 Scan软件设置 (5)3.4 电源模式设置 (6)3.5 扫描头设置 (7)3.6 IP 地址设置 (7)3.7 屏幕亮度设置 (8)3.8 恢复出厂设置 (8)3.9 扫描二维码设置 (8)1.驱动安装PDA在与电脑连接之前,需要在电脑上安装Activesync(Windows Mobile 设备中心)6.1简体中文版的驱动程序,然后才能使用数据线将PDA与电脑连接。
2.搭建运行环境2.1 复制初始化软件到PDA首先,将PDA与电脑连接,并将初始化文件拷贝到PDA:我的设备→Honeywell→AutoInstall文件夹里;初始化文件主要包括:NETCFv35.Messages.zh-CHS、、NETCFv35.wce.armv4、DisplaySIP,如下图:其次,使用手写笔按PDA键盘右下角小孔中的的小按钮,重启PDA,完成重启后,系统自动进行PDA 初始化,完成“AutoInstall”文件夹中的软件的安装;2.2 安装IMS-PDA系统在PDA:我的设备→Program Files文件夹下创建一个名称为“IMS”文件夹,把下图中的所有文件拷贝至PDA上新建的文件夹内;创建绿色图标IMSPDA的快捷方式,并发送到PDA桌面,再把此快捷方式复制到:我的设备→Windows →启动(第二个启动文件夹);3.PDA设置3.1 快捷键设置点击左下角Window s→设置→控制面板→按键设定如下图:说明:APP1至APP10如无特殊快捷设置都需选择为NO Function!新PDA有默认的快捷功能,如点错按钮会造成诸多问题!如需设置,先将程序复制到我的设备→Windows文件夹内安装,选择需要设置的快捷键,再选择“Application”,然后点击“打开”按钮,去安装的文件夹寻找要设置的文件,选中点击OK。
本特利3500型TSI系统安装与调试

1 传感器的安装与调试1.1轴承振动传感器探头的安装6个φ8 mm灵敏度为7.87 V/rnm 的涡流探头分别装于1号、2号、3号轴承处。
每个轴承处安装两只互成90°,垂直于轴承,探头与水平方向的夹角为45°,分别测量X、Y方向上的振动。
一般涡流传感器,涡流影响范围约为传感器线圈直径的三倍,因此传感器对应的测量宽度应为传感器直径的三倍,而且在传感器空间24mm范围内不应有其它金属物存在,否则会带来误差。
安装间隙电压应为传感器输出特性曲线确定的线形中点位而定,φ8 mm灵敏度为7.87 V/mm的探头,安装间隙电压为- 9.75 V或1.2 mm左右。
由于传感器线形电压范围大大超过测量范围,所以安装间隙允许有较大的偏差,只要保证测量范围在线形段内即可,但为了满足故障诊断和可靠性的需要,一般要求安装电压9.75土0.2 V。
1.2轴向位移、高低压差胀传感器的安装轴向位移测的是推力轴承相对汽缸的轴向位移,在机组运行过程中,使动静部件之间保持一定的轴向间隙,避免汽轮机内部转动部件和静止部件之间发生摩擦和碰撞。
两只轴向位移传感器探头安装在2号轴承处,分别装于甲乙两侧,探头朝向低压缸方向安装探头型号为7200型φ14 mm探头,灵敏度为3.937 V/mm,前置器供电电压为-24V。
大轴相对于汽缸的设计零点为止推轴承靠在工作瓦面为大轴零位。
在安装轴向位移和低压差胀传感器前,首先要把大轴推到零位,然后按要求安装。
轴向位移的量程范围为-2 mm一+ 2 mm,安装电压- 9.75土0.2 V 沾化电厂汽轮机膨胀相对死点在2号轴承处,高压缸转子膨胀在以2号轴承处为相对死点向前箱方向膨胀,低压缸转子膨胀在以2轴承处为相对死点向发电机方向膨胀。
高低压差胀探头为不带前置器φ25 mm涡流探头,灵敏度为0.8 V/ mm,因为高低压差胀都是朝着发电机方向安装,要使高低缸差胀测量范围均在线形范围之内,按照探头线性中点及量程范围- 2--10 mm定位。
中海达V30V50、F系列GNSS RTK系统使用说明书

引言 ............................................................................................................................. 35 基准站作业方案示意图 ............................................................................................. 35 移动站作业方案示意图 ............................................................................................. 41
基本操作 ................................................................................................. 14
引言 ............................................................................................................................. 15 按键功能 ..................................................................................................................... 16 指示灯说明 ................................................................................................................. 17 启动和停止接收机 ..................................................................................................... 20 静态数据存储 ............................................................................................................. 20 RTK 数据存储 ............................................................................................................. 21 复位接收机 ................................................................................................................. 21 恢复出厂设置 ............................................................................................................. 21 格式化接收机 ............................................................................................................. 22 供电系统 ..................................................................................................................... 23 通信模块 ..................................................................................................................... 27 SIM 卡/USIM 卡 .......................................................................................................... 30 固件 ............................................................................................................................. 33
TZID(v30)安装及操作说明书
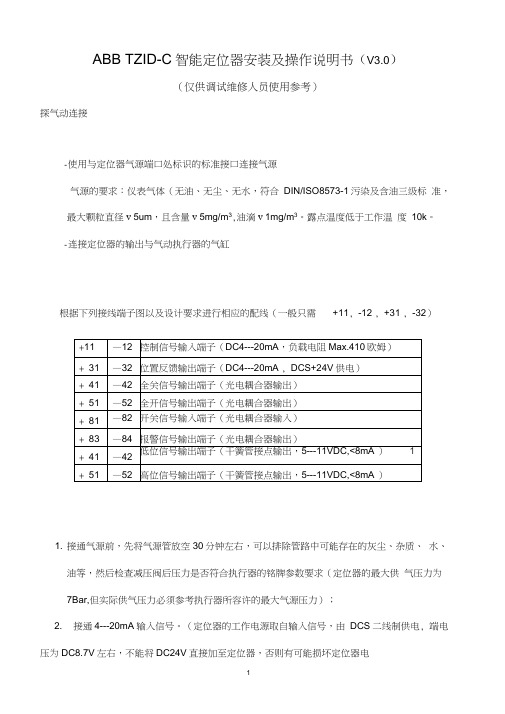
ABB TZID-C智能定位器安装及操作说明书(V3.0)(仅供调试维修人员使用参考)探气动连接-使用与定位器气源端口处标识的标准接口连接气源气源的要求:仪表气体(无油、无尘、无水,符合DIN/ISO8573-1污染及含油三级标准,最大颗粒直径v 5um,且含量v 5mg/m3,油滴v 1mg/m3。
露点温度低于工作温度10k。
-连接定位器的输出与气动执行器的气缸根据下列接线端子图以及设计要求进行相应的配线(一般只需+11, -12 , +31 , -32)1. 接通气源前,先将气源管放空30分钟左右,可以排除管路中可能存在的灰尘、杂质、水、油等,然后检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电, 端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3. 检查位置反馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键•同时点击或雁,直到操作模式代码1.3显示出来•松开MODE键•使用或艇操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程(小角度)应用范围在—28°-- + 28°之内。
角行程(大角度)应用范围在—57 °- + 57之内。
全行程角度应不小于25 °若角度未符合上述要求,则需通过调节反馈杆、联轴器或者定位器的安装位置使得角度值满足要求。
若气动执行机构更换定位器,重新安装时必须注意新更换定位器输出轴的角度,正确连接方法如下:先将执行机构输出轴调到全行程的50%,然后再将定位器带有指针的输出轴调到中间位置,(或将定位器运行操作菜单设到1.3,通过调整输出轴,使面板显示为0°,最后再将定位器输出轴与执行机构连接紧固。
天傲平台软件V3.0.1快速安装指南V1.0-071225

天傲平台软件V3.0.1快速安装指南V er 1.0_071225目录资料使用说明 (2)第一部分:软件基础框架结构 (3)1. 3110D中控安装配置模式 (3)1.1 集控型3110D中控安装配置模式 (3)1.2 可视型3110D中控安装配置模式 (4)1.3 录播型3110D中控安装配置模式 (5)2. 3110DG-L中控安装配置模式 (6)3. Linux界面2940终端安装配置模式 (7)3.1 终端数量少于10台的安装配置模式 (7)3.2 终端数量多于10台的安装配置模式 (8)4. Windows界面2940终端安装配置模式 (10)4.1 带硬盘2940终端安装配置模式 (10)4.2 VHD(不带硬盘)2940终端安装配置模式 (11)5. 天傲8000安装配置模式 (12)5.1 带硬盘天傲8000安装配置模式 (12)5.2 VHD(不带硬盘)天傲8000安装配置模式 (13)6. 4620A视频服务器安装配置模式 (14)7. 4610/4620视频服务器安装配置模式 (15)8. 2610/2910/2930共平台安装配置模式 (16)8.1 终端数量少于10台的安装配置模式 (16)8.2 终端数量多于10台的安装配置模式 (17)第二部分:主要软件列表 (19)第三部分:软件的安装与调试 (22)1. 操作系统主要插件程序的安装 (22)1.1 操作系统与基本插件的安装 (22)1.2 DHCP服务的安装与配置 (22)1.3 SQL Server 2000数据库的安装 (23)1.4 IIS(FTP)的安装与配置 (24)2. 管理服务器主要程序的安装 (24)2.1 后台主要服务的安装 (24)2.2 做为主/辅课件服务器相关程序的安装 (26)3. 网管机主要程序的安装 (27)4. NFS服务、 2940、媒体中心、电视墙相关程序的安装 (28)4.1 DHCP服务的安装 (28)4.2 TFTP服务的安装 (28)4.3 Service for unix3.5的安装与配置 (28)4.4 linux界面2940启动文件的安装与配置 (29)4.5 2810/2820媒体中心启动文件的安装与配置 (29)4.6 3210A电视墙启动文件的安装与配置 (30)4.7 3210B电视墙 (31)4.8 2610/2910/2930共平台启动文件的安装与配置 (31)4.9 天傲主要服务总结 (32)5. 教师机程序的安装 (33)5.1 操作系统与系统插件的安装 (33)5.2 应用程序的安装 (33)5.3 接管服务程序的安装(可选) (34)6. 带硬盘Windows界面的2940、8000终端程序的安装 (35)6.1 操作系统与系统插件的安装 (35)6.2 课件播放程序的安装 (35)6.3 视频采集卡、VGA采编卡驱动的安装(可选) (35)6.3 应用程序的安装 (35)7. 4610/4620视频器相关程序的安装 (37)7.1 4610视频服务器相关程序的安装与配置 (37)7.2 4620视频服务器程序的安装与配置 (37)8. 录像服务器的安装 (39)第四部分:附录 (40)附录1:VHD终端镜像制作详细步骤 (40)附录2:如何修改VHD终端镜像软件 (44)附录3:2940终端的中控配置 (46)附录4:2940部分使用技术与调试技巧 (47)附录5:dplan数据库各表用途及说明 (48)附录6:常见问题处理 (50)更新说明:1、Ver1.0—2007年12月25日:根据全新发布的天傲平台软件V3.0.1版本整理的快速安装指南,通过本资料可以快速的对全系列硬件产品布署时完成相对应软件的安装与调试。
道亨TwSolid放样软件操作规程
道亨放样软件操作规程编写人:刘宏2011年10月一、道亨放样软件概述1、道亨放样软件的特点我们目前使用的道亨铁塔放样软件TwSolid是一套既可以进行角钢铁塔,又可以进行钢管塔放样的三维柔性放样软件,将来也可用来进行构支架、钢梁等的放样。
该软件的特点是三维立体放样模式,将铁塔各部件包括螺栓以三维立体的形式展现在放样人员面前,其准确性、真实性非常高。
同时,相比其他同类放样软件,道亨放样软件具备界面友好、操作简便、易学易用、自动化程度高的优点,且放样差错率更低。
这些优点都便于我们实现铁塔快速准确放样和免试装的目的。
2、道亨放样软件的安装道亨放样软件安装和其他一般应用软件安装类似,运行其安装程序即可,安装程序会自动安装道亨TwSolid程序系统、TwMachining 程序系统和一些系统支持软件。
道亨放样软件的加密狗可以安装在局域网的任意一台安装了道亨放样软件的计算机上,为保证运行正常,可将TwSolidSK.xml文件中指向IP地址设为安装加密狗的那台计算机的IP地址,并将此文件拷贝复制到要运行道亨放样软件的计算机的Windows系统文件夹下的\system32\文件夹下。
安装完成后程序的目录和子目录内容、功能和可对这些文件进行编辑的应用程序详见下表:TwSolid所在目录:C:\DHCAD\TwSolid\或C:\DHCAD\道亨铁塔三维放样及生产辅助系统\。
子目录列表(2011.0808版)3、道亨放样软件的构成道亨放样软件由两大功能部分构成,即:TwSolid系统和TwMachining系统。
第一部分为TwSolid系统,其功能为进行铁塔的建模、构塔,可将塔身主材、辅材、螺栓等部件按设计图纸进行构造,生成三维立体的图形,并可输出各类材料表、工艺卡样图、装配图等。
目前可生成的材料类型有角钢、钢板、钢管、槽钢、螺栓。
一些通用的零件可以预先做出模板,在构塔时直接调用。
可做出零件模板的有C型插板、U型插板、X型插板、高颈法兰、平法兰、塔脚法兰、爬梯、爬梯连接件等等。
北斗终端安装及货运平台入网操作流程
星软北斗终端安装、入网及货运平台操作说明安装设备:制造商ID和终端型号要在货运平台备案过,未备案的设备是不能使用的接线:按照国家交通部要求必须接9线,分别是1、常通电源线,2、ACC,3、搭铁线,4、速度线,5、刹车线,6、左转向灯,7、右转向灯,8、近光灯,9、远光灯1、安装时的资料准备:1)车辆登记证扫描图片或清晰数码照2)车辆行驶证扫描图片或清晰数码照3)车身照片,左前方45角度,且车牌号清晰可见。
2、设置:需要设置的项目:1)车牌号;2)终端手机号;3)车辆VIN码/车架号;4)省域ID和市县域ID,要和实际情况相符。
例如:安徽省省域ID是34,合肥的市县域ID是01005)主/备域名或主/备IP、端口(查看已默认正确不需设置,一定要注意主和备都要设置正确);6)车牌颜色(一般默认黄色,如正确可不用设置);7)特征系数(就是车辆的速度脉冲系统,需要根据不同的车型,出厂已默认但不同的车型是不一样的,可找车厂或根据经验积累,要么安装入网后根据GPS速度和行驶记录仪速度进行远程发指令修正,修正值的计算方法:行驶记录仪速度/GPS速度*当前特征系统);8)平台选择(以星软设备举例:进货运平台的选择“货运平台”;只进星软平台或通过星软平台转发到省联网联控平台的选择“星软平台”;通过其他服务商代接货运平台又要使用星软平台监控功能的,选择“货运+星软双平台”,注意此方式要消耗平常2倍的数据流量。
需要查看的项目:1)终端ID(一般会贴在设备外面,但还是以菜单里面的参数为准)2)确认车牌和终端手机号都已经设置成功3)主屏幕界面查看通讯信号和卫星型号是否正常星软设备操作说明:如何进入操作界面更改信息:1)设备按钮操作,按“菜单”键进入主菜单,长按“确认”,出来输入管理员密码界面,利用上下键依次输入密码(100000);主菜单上面出现图标表示可以修改参数。
2)在行车信息按“确认”,往下翻菜单项到“车辆信息”按确认,进入然后往下翻,设置车牌、车辆VIN以及特征系统,设置成功后长按“确认”保存,往下翻确认车牌颜色是否为黄,然后按“菜单”退出。
V30说明手册
视频会议系统V30用户指南目录欢迎使用V30会议系统 (3)安全使用V30系统 (3)连接V30系统 (3)系统及配件 (3)系统接口 (3)将系统固定到电视机顶部 (4)连接并开启系统 (4)浏览V30系统 (5)用户界面 (5)系统状态图标 (5)遥控器 (5)系统菜单 (6)界面通用操作 (6)拨打和接听电话 (7)语音电话和视频电话 (7)拨打语音电话 (7)拨打视频电话 (7)从通话清单拨打电话 (7)接听或拒接来电 (7)其它通话功能 (7)通话状态图标 (8)结束通话 (8)自动接听来电 (8)免打扰 (8)配置网络使用 (9)创建网络连接 (9)配置H.323使用 (9)配置静态NAT设置 (9)配置呼叫 (10)选择码率 (10)选择音频、视频编解码器 (10)配置网络服务质量 (10)音频管理 (10)选择音频输入 (10)调节音量 (10)音频质量 (10)选择来电铃声................................. 10视频管理.. (11)选择视频输入 (11)调节摄像机 (11)配置外置摄像机 (11)控制摄像机 (11)设置摄像机预设位 (11)远程摄像机控制 (12)叠加字幕 (12)管理通话清单 (12)使用电话簿 (12)添加联系人 (12)查询联系人 (12)呼叫联系人 (12)管理V30系统 (13)更改管理员密码 (13)呼叫统计 (13)系统时间 (13)重新启动系统 (13)恢复出厂设置 (13)升级系统 (13)定制系统 (14)选择语言 (14)更换背景 (14)设置屏保 (14)输入文字 (14)输入法 (14)输入法图标 (14)切换输入法 (14)输入汉字 (14)输入英文字母 (15)输入标点符号和空格 (15)输入数字 (15)删除字符 (15)故障排除 (16)常见原因 (16)连接问题 (16)摄像头问题 (16)显示问题 (16)音频问题 (16)规格说明 (17)(空白页)欢迎使用V30会议系统V30是一款高性能机顶盒式会议终端,它结构紧凑,体积小巧,包括主机盒、遥控器,方便携带。
TZIDC总线型说明书1022

TZID-C总线型智能定位器阐明书气路连接其中1为工作气源进气口,2、3为气源输出口,分别接气缸旳前后端口,在定位器供气前,首先要检查执行机构机械连接与否合适。
电气连接端子编号功能作用+11 -12 总线连接器端子+41 -42 低位信号输出端子(选配)+51 -52 高位信号输出端子(选配)TZIDC-110为Profibus PA总线,两线制总线供电,工作电流为10.5mA,供电电压为9.0V-32V之间,传播数率为31.25Kbit/s;TZIDC-120为FF总线,两线制总线供电,工作电流为11.5mA,供电电压为9.0V-32V之间,传播数率为31.25Kbit/s;控制级功能及转换方式:控制级分类功能屏幕显示总线控制级合用于现场总线控制操作[ REMOTE ]运行操作级合用于初次调试及平常旳检查和现场手动开关操作[ 1.x ](x为1、2、3)参数配置级合用于初次调试中旳参数设置及自动整定[ P x.x ]( P为参数PARAMETER首字母) 控制级转换方式目前控制级目旳控制级转换方式总线控制级运行操作级按住MODE键+ENTER键并保持3秒运行操作菜单:操作模式中旳 1.1用于远程控制时检查远程控制指令和现场温度来测试定位器与否可以正常远程控制,操作模式中旳1.2和1.3都为手动模式,区别是1.2用于检查比例显示旳反馈值,而1.3专用于检测定位器反馈杆实际运行范围与否超过传感器旳最大检测范围,以便校正反馈杆旳连接,获得最佳旳控制效果。
参数配置菜单注:除P1.1,P2.3,P3.2外,一般其他旳参数无需改动。
P1.1为自动整定程序,P2.3为执行器旳控制输出正反方向作用形式(正方向作用为信号增大对应气源输出口OUT1压力增长),P3.2为正反调整形式,对应输入信号对执行机构正反作用。
定位器信息显示及文字描述:SIMUL 仿真程序通过外部设备启动CALC_ERR 真实性检查发生错误定位器错误代码表代码显示内容描述处理措施ERROR10 电源电压开路或过低超过20毫秒检查电源和配线ERROR11 电源电压减少至最低电压值如下检查电源和配线ERROR12 执行机构位置超过传感器检测范围检查传感器和执行机构连接角度ERROR20 EEPROM无法存取数据重启后仍无法存取数据,需返厂修理ERROR21 处理测量值时,指针发生错误设备重启后错误仍存在,需返厂修理ERROR22 处理表格数据时,指针发生错误设备重启后错误仍存在,需返厂修理ERROR23 检查配置数据和校验时发生错误设备重启后错误仍存在,需返厂修理ERROR24 定位器内存数据错误设备重启后错误仍存在,需返厂修理ERROR50-- ERROR99 定位器内部错误设备重启后错误仍存在,需返厂修理主板跳线配置(仅合用于TZIDC-120)跳线1为仿真跳线正常调试默认设置为:,此位置为严禁仿真。
3G时间服务器V30使用说明书V1015日

3G时间服务器V30使用说明书V10(2月15日)3G时间服务器V3.0 使用说明书光通信产品部目录1 概述 (1)2 3G时间服务器V3.0功能概述 (2)2.1 结构介绍 (3)2.2 系统功能原理 (4)定时参考输入 (4)接收卫星的定时信息 (5)地面传送的参考信号 (6)主受控时钟 (6)备受控铷钟.............. 错误!未定义书签。
内置DDS直接数字合成器 .. 错误!未定义书签。
定时输出 (7)定时输出信号 (7)定时输出信号 (7)盘输出信号 (7)输出信号 (8)管理控制单元 (8)2.3 系统的配置 (8)系统配置表 (8)槽位分布图(前视) (10)槽位分布图(后视) (10)参考输入配置 (10)参考(卫星及地面链路)的倒换设置及优先设定逻辑 (11)受控时钟 (11)定时输出配置 (12)电源输入盘配置 (12)2.4 面板显示介绍 (13)2.5 输入输出接口介绍 (16)3 主要技术指标 (18)3.1 接口指标 (18)参考定时输入信号接口 (18)卫星信号输入接口指标 (18)地面链路信号输入接口指标 (19)定时信号输出接口指标 (19)定时信号输出接口 (19)定时信号输出接口 (20)3.2 内部时钟 (21)内部振荡器输出特性 (21)3.3 1PPS+TOD时间输出性能 (22)3.4 P TP时间输出性能 (23)4 单盘功能介绍 (25)4.1 电源盘 (25)面板框图 (25)物理接口 (25)4.2 M CP盘 (25)面板框图 (26)物理接口 (26)4.3 G BTP盘 (26)面板框图 (27)物理接口 (27)4.4 R B盘 (28)面板框图 (28)物理接口 (29)4.5 P TP4盘 (30)面板框图 (31)物理接口 (31)4.6 P GE4盘 (32)面板框图 (32)物理接口 (32)4.7 T P16盘 (33)面板框图 (33)物理接口 (34)4.8 O UT16盘 (34)面板框图 (34)物理接口 (34)1概述随着3G网络的大规模部署,特别是TD-SCDMA 的网络特点,运营商在时间同步上的需求也越来越明显,并且变得必不可少。
车载DVR说明书V30(中文版)
车载DVR说明书V30(中文版)车载专用高性能DVR 使用说明书(电子版)1 注意事项安装和使用之前,请一定详细阅读使用说明书,以便您能正确使用和保护您的机器。
本说明书前面部分为注意事项和安装使用介绍,请先行阅读。
注意事项●为保障您的权益,在安装使用本产品前,请仔细阅读本手册内容。
●本产品为车内使用设备,为了防止短路或电击危险,请勿将本机放在雨中或潮湿的环境中。
●万一有任何固体或液体进入机箱内,请立即断开机器电源,并请有资格的技术人员检查后方可再启动。
●本产品属于高科技设备,机内几乎没有用户自己能够修理的原件部分。
发生故障时必须请有资格的技术人员来检修或与经销商联系。
安装环境●本录像机使用直流12~36伏电源,在使用前必须确认当地的电源电压;●如果长期不使用机器,最好完全断开电源;●请选择适当的安装位置,以便空气能在机器周围自由流通,以防止机器过热;●机器不可安装在散热器、通风道等热源附近,或有直射阳光、过多尘埃、或会发生机械振动或冲击强的地方。
2 产品规格DNP-DVR是专为汽车、火车等视频监控和远程监控开发的一款高性能、功能强大可扩展性强的设备。
它采用最快的高速处理器和嵌入式Linux平台开发,结合IT领域中最先进的H.264视频压缩/解压缩技术。
以SD卡作为存储介质,MDVR 可实现4路CIF、HD1和D1格式的音视频录像、汽车行驶信息记录功能。
DNP-DVR 产品外观简洁、具有超强抗振,安装灵活方便,功能强大,可靠性高等特点。
DNP-DVR的产品规格见下表:表1:MDVR 产品规格列表DNP-DVR的基本电气参数如下表:表2: DVR 基本电气参数3 前后板及录像机安装说明3.1 前面板说明图 1 前面板指示灯图表3 前面板接口说明3.2 后面板接口说明图 2 后面板接口图后面板接口说明如下表:表4 后面板接口说明3.3 接线说明3.3.1 AV视音频输入线说明图3 AV视音频线接入示意图3.3.2 电源线说明图4 电源输入线缆实物图电源线如图4所示,一端是6PIN白色插头,接在设备后面板的6PIN白色接头上。
2020年(VR虚拟现实)HDD-MDVR说明书V30(中文版)
(VR虚拟现实)HDD-MDVR说明书V30(中文版)车载HDD-MDVR 使用说明书(电子版)目录1注意事项52产品规格63前后板及录像机安装说明83.1前面板说明83.2后面板接口说明93.3接线说明103.3.1AV视音频输入线说明103.3.2电源线说明103.3.3I/O报警输入输出说明113.4录像机检查123.4.1开箱及附件检查123.4.2SD卡安装说明134遥控器使用说明144.1遥控器按键说明144.2软键盘输入说明165录像机使用操作说明175.1用户登录185.2直通预览界面195.3录像检索205.3.1详细文件及备份说明215.3.1录像回放说明225.4录像设置225.4.1帧率动态配置等说明225.4.2定时录像设置245.5功能设置265.5.1报警设置275.5.2云台设置305.5.3时间设置315.5.4存储设备管理325.5.5设备维护,系统升级说明335.5.6网络设置345.6系统信息375.7车辆信息385.7.1基本信息395.7.2速度设置395.7.3加速度设置405.7.4温度设置405.7.5开关机设置415.7.6无线设置425.7.7WIFI设置425.8显示设置435.9密码管理446FAQ461注意事项安装和使用之前,请一定详细阅读使用说明书,以便您能正确使用和保护您的机器。
本说明书前面部分为注意事项和安装使用介绍,请先行阅读。
➢注意事项●为保障您的权益,在安装使用本产品前,请仔细阅读本手册内容。
●本产品为车内使用设备,为了防止短路或电击危险,请勿将本机放在雨中或潮湿的环境中。
●万一任何固体或液体进入机箱内,请立即断开机器电源,并请有资格的技术人员检查后方可再启动。
●本产品属于高科技设备,机内几乎没有用户自己能够修理的原件部分。
发生故障时必须请有资格的技术人员来检修,或与经销商联系。
➢安装环境●本录像机使用直流12~36伏电源,在使用前必须确认当地的电源电压;●如果长期不使用机器,最好完全断开录像机电源;●请选择适当的安装位置,以便使空气能在机器周围自由流通,以防止机器过热;●机器不可安装在散热器、通风道等热源附近,或有直射阳光、过多尘埃、或会发生机械振动或冲击的地方。
台达DTD温度控制器用户使用操作手册中文高清完整版
前言非常感谢您选用台达产品,在使用前,请仔细阅读本使用手册,并妥善保管本手册以便需要时随时取用。
疏于阅读和理解本手册中提供的资料可能会造成人员的伤亡,损坏产品,或使产品失效。
安全指南手册约定以下约定适用于本手册参数解释PV 当前值SV 设定值PV/SV 初始界面使用注意事项警告设用时需要对其额定值和性能留有充分余地,并在故障安全等方面采取足够的安全措施下使用,请勿在本手册中未记载的条件或环境下使用。
警告 其它设备损坏,请确认将其安装至自动故障安全防护装置设备上。
安全注意事项警告 上电时请勿接触机体端子或进行维修,否则可能遭致电击。
小心 请使用适合M3螺丝的压接端子(最大宽度7.2mm ),端子螺丝在锁紧时请勿过度用力。
确认配线接到正确适当的端子。
如果有尘土或金属残渣掉入机身,可能会造成误动作。
请勿修改或擅自拆卸本控制器。
空余端子请勿使用。
安装时离开高电压及具有强高周波噪声的地方以防止干扰。
在会发生以下情况的场所避免使用此控制器: (a) 灰尘过多及有腐蚀性气体;(b) 高湿度及高辐射;(c) 震动及冲击。
实施配线时和更换温度传感器时,务必关闭电源。
由测温体到控制器本体的配线路请用最短距离配线,为了避免噪声及诱导的影响尽可能把电源线和负载配线分开。
上电前请确认电源/信号装配是否正确,否则可能造成严重损坏。
切断电源一分钟之内,线路未完全放电,请勿接触内部线路。
请使用干布清洁本机器,勿使用含有酸、碱的液体清洁。
注意本机器为开放型机壳,必须安装在具防尘、防潮及免于电击/冲击的外壳配电箱内。
热电偶的引线要延长时,或在接线的场合下,请根据热电偶的类型选用合适的补偿导线。
铂电阻的引线需要延长时或接线的场合下,只能使用低阻值的导线(每根最大5欧),并且保证三根导线的阻值都是相同的。
目录前言 (1)安全指南 (1)手册约定 (1)使用注意事项 (2)安全注意事项 (2)目录 (4)第1章 DTD简介 (7)1.1 DTD功能简介 (8)1.2 硬件结构简介 (9)1.3 操作面板简介 (10)1.4 程序结构简介 (11)第2章 安装与维护 (12)2.1机械安装 (13)2.1.1外形尺寸及开孔尺寸 (13)2.1.2安装方式 (15)2.2电气安装 (16)2.3安装注意事项: (18)2.4维护 (19)2.4.1常见故障 (19)2.4.2 显示错误代码 (20)第3章 调试与使用 (22)3.1 基本操作 (23)3.1.1 模式切换操作 (23)3.1.2 参数选项切换操作 (24)3.1.3 参数值设定操作 (25)3.2 初始设置 (26)3.2.1首次使用必选参数设置 (26)3.2.2参数完全设置 (28)3.3 初始设置范例 (30)3.3.1 手动控制范例 (30)3.3.2 PID自调节范例 (34)第4章 参数定义 (38)4.1 设定模式 (42)4.1.1 传感器类型设定 (42)4.1.2 温度单位设定 (43)4.1.3 小数点位置设定 (43)4.1.4 温度测量上限设定 (43)4.1.5 温度测量下限设定 (43)4.1.6 控制方式设定 (44)4.1.7 加热/冷却选择 (44)4.1.8 报警模式设定 (44)4.1.9 报警功能选项 (48)4.2 调整模式 (49)4.2.1 AT自整定 (49)4.2.2 比例带值设定Pb (49)4.2.3 积分时间常数设定Ti (49)4.2.4 微分时间常数设定Td (49)4.2.5 P/PD补偿设定 (50)4.2.6 稳态积分量设定 (50)4.2.7 加热感度设定 (50)4.2.8 冷却感度设定 (50)4.2.9 PID冷却控制周期设定 (51)4.2.10 PID加热控制周期设定 (51)4.2.10 测量偏差补偿值设定 (51)4.2.11 测量偏差增益值设定 (51)4.2.12 滤波设定 (52)4.2.13 程序步骤数设定 (53)4.2.14 循环执行次数设定 (53)4.2.15 程序停止方式设定 (53)4.2.16 程序步骤n温度设定 (53)4.2.17 程序步骤n时间设定 (53)4.3 运行模式 (54)4.3.1 PV/SV当前值/设定值 (54)4.3.2 输出动作设定 (54)4.3.3 报警上限设定 (54)4.3.4 报警下限设定 (54)4.3.5 按键锁设定 (54)4.3.6 输出量显示 (55)4.3.7 报警峰值显示 (55)4.3.8 报警谷值显示 (55)第5章 高级应用 (56)5.1 如何选用控制方式? (57)5.2 如何调整PID参数? (58)5.3如何校准温控器? (61)5.4如何恢复出厂设置? (61)5.5 两线制PT100如何接线? (61)5.6 电压脉冲输出型与继电器输出型区别? (62)附录 (63)附录1:温度传感器种类及温度范围 (63)附录2:操作参数列表 (64)附录3:规格参数列表 (64)附录4:显示字符对照表 (68)第1章本章主要讲解DTD的功能、硬件和软件结构,以便用户有一定的理论基础,从而使用户能尽快熟悉本产品的特点。
中海达VF系列GNSSRTK系统使用说明书

RTK数据存储
iHand 10手簿和GIS+手簿都可以通过蓝牙或电缆线连接中海达V30接收机,当设置完成开始工作以后,采集到的RTK数据存储在手簿的存储卡里,可通过随机配置的手簿数据线将RTK数据下载到您的电脑上。
腐蚀性液体或气体
电子干扰源
请勿将GNSS接收机安置在电力及具有强干扰信号的污染源附近,比如:
油道(火花塞)
电视及电脑显示器
发电机
电动摩托
直流-交流电源转换设备
荧光灯
电源开关
CHAPTER
4
基本操作
本章节介绍:
■引言
■按键功能
■指示灯说明
■启动和停止接收机
■静态数据存储
■RTK数据存储
■复位接收机
■恢复出厂设置
喇叭:仪器实时操作及状态进行语音播报。
提示:1、工作中暂时不需要使用五芯插座、八芯插座和差分天线接口时请盖上胶塞,达到防水防尘的目的。
2、当喇叭进水时,可能出现喇叭无声或声音沙哑,待烘干后声音将恢复正常。
通信
如图3-5,为通信模块外观图,V30接收机可根据不同需求安装传统UHF电台、GPRS和3G通信模块。
方式
卫星灯(单绿灯)
信号灯(双灯之绿灯)
基准站
●
○
移动站
○
●
静态
●
●
2、数据链(双击F2进入数据链设置模式,之后再单击F2进行模式选择,按电源键确认,超过十秒未按电源键,将自动确认):●亮○灭
类型
卫星灯(单绿灯)
信号灯(双灯之绿灯)
UHF/GSM/CMDA
●
TZID-C智能定位器操作方法

TZID-C型定位器核心是微控制处理器CPU,所有程序的处理运算皆在此。
输入信号及位置反馈经过4000步12位,20ms采样的A/D转换器进行处理,从而保证了信号处理的精度及快速性,CPU的供电直接取自输入信号,操作程序包括用于自动调整参数的自整定过程,及自适应控制程序,用于精确定位的优化控制操作,通过带三位三通放大器的电气转换器驱动气动执行机构,从CPU发出的定位电信号比例地转换成气信号,成比例地调节3/3气动开关,气体从定位器输出至气动执行器及气体的排放均成比例地调节,当到达设定定位值时,3/3气动开关锁定在中间状态;TZID-C定位器配有的操作面板,包括两排LCD显示器和4个按键,如图5。
图5 TZID-C型I/P电气转换器功能键操作键盘的优化设计适用于就地组态,调校及监测。
同时.组态、操作及监测功能可以通过HART通讯协议与PC机连接,并由TZID-C内置通讯端口来完成:还可以通过FSK-Modem在4~20mA信号线的任意点接入进行通讯。
采用模块化的设计,任何附加功能可以在基本模件的基础上随意扩展。
只要插入相应的模件,既可实现模拟及数字反馈功能。
也可以选装限位开关(微动开关)及机械指示。
图6 TZID-C功能原理1.调试方法接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力),接通4~20mA输入信号。
(定位器的工作电源取自输入信口,由DCS二线制供电,不能将24VDC直接加至定位器,否则有可能损坏定位器电路)。
根据下列接线端子图以及设计要求进行相应的配线(一般只需+ll,-12,+3l,-32)表2检查位置反馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):按住MODE键,并同时点击或键,直到操作模式代码1.3显示出来,松开MODE键,使用或键操作,使执行器分别运行到两个终端位置,记录两终端角度,两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称),直行程应用范围在-280~+280之内,角行程应用范围在-570~+570之内,全行程角度应不小于250。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB TZID-C智能定位器安装及操作说明书(V3.0)(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源气源的要求:仪表气体(无油、无尘、无水,符合DIN/ISO8573-1污染及含油三级标准,最大颗粒直径<5um,且含量<5mg/m3,油滴<1mg/m3。
露点温度低于工作温度10k。
·连接定位器的输出与气动执行器的气缸※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)※调试步骤1. 接通气源前,先将气源管放空30分钟左右,可以排除管路中可能存在的灰尘、杂质、水、油等,然后检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3. 检查位置反馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):·按住MODE键·同时点击↑或↓键,直到操作模式代码1.3显示出来·松开MODE键·使用↑或↓键操作,使执行器分别运行到两个终端位置,记录两终端角度·两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程(小角度)应用范围在-28°---+28°之内。
角行程(大角度)应用范围在-57°---+57°之内。
全行程角度应不小于25°若角度未符合上述要求,则需通过调节反馈杆、联轴器或者定位器的安装位置使得角度值满足要求。
若气动执行机构更换定位器,重新安装时必须注意新更换定位器输出轴的角度,正确连接方法如下:先将执行机构输出轴调到全行程的50%,然后再将定位器带有指针的输出轴调到中间位置,(或将定位器运行操作菜单设到1.3,通过调整输出轴,使面板显示为0°),最后再将定位器输出轴与执行机构连接紧固。
4. 启动自动调整程序:(执行器或阀门安装完毕后,系统最好通过此程序重新整定)★方法一:在1.1模式下自整定·按住MODE键·同时点击↑或↓键,直到操作模式代码1.1显示出来根据变换角度不同,分别选择MODE键或ENTER键进行自动整定;直行程(小角度):·按住MODE键直到显示ADJ-LIN,然后松开该键,·再按住MODE键3秒直到计数器倒数到0,·松开MODE键,自动调整程序开始运行(显示正在进行的程序语句号)。
·自动调整程序大约需要5分钟左右,顺利结束后,系统参数会被自动存储,并自动切换控制方式到1.1 CTRL_FIX。
角行程(大角度):·按住ENTER键直到显示ADJ-ROT,然后松开该键,·再按住ENTER键3秒直到计数器倒数到0,·松开ENTER键,自动调整程序开始运行(显示正在进行的程序语句号)。
·自动调整程序大约需要5分钟左右,顺利结束后,系统参数会被自动存储,并自动切换控制方式到1.1 CTRL_FIX。
★方法二:在P1.1模式下自整定①切换至参数配置菜单·同时按下↑和↓键·点击ENTER键,然后松开该键·计数器从3计数到0·松开↑和↓键程序自动进入P1.0配置菜单②使用↑和↓键选择定位器运行形式为直行程或角行程。
角行程运行形式:角度变换大于-28°—+28°(56°)小于-57°—+57°(114°)直行程运行形式:角度变换小于-28°—+28°(56°)注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
③启动自动调整程序·按住MODE键·点击↑键一次或多次,直到显示出“P1.1”·松开MODE键·按住ENTER键3秒直到计数器倒数到0·松开ENTER键,自动调整程序开始运行(显示正在进行的程序语句号)。
·自动调整程序顺利结束后,显示器显示“COMPLETE”。
在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查故障原因,也可以人为地强制中断自动调整程序。
※运行级操作模式的选择1.0模式:自适应控制模式·按住MODE键·点击↑键一次或多次,直到显示出“1.0 CTRL_ADP”·松开MODE键·显示器显示阀位百分数如“50.0% POSITION”1.1模式:固定控制模式·按住MODE键·点击↑键一次或多次,直到显示出“1.1 CTRL_FIX”·松开MODE键·显示器显示阀位百分数如“50.0% POSITION”1.2模式:在执行器的实际全行程范围内手动控制·按住MODE键·点击↑键一次或多次,直到显示出“1.2 MANUAL”·松开MODE键·显示器显示阀位百分数如“50.0% POSITION”·使用↑或↓键进行手动控制先按住↑键再按住↓键(始终按住↑键),执行器将快速开启先按住↓键再按住↑键(始终按住↓键),执行器将快速关闭1.3模式:在定位器的检测范围内手动控制·按住MODE键·点击↑键一次或多次,直到显示出“1.3MAN_SENS”·松开MODE键·显示器显示反馈杆所处角度位置如“-15.0°SENS_POS”·使用↑或↓键进行手动控制先按住↑键再按住↓键(始终按住↑键),执行器将快速开启先按住↓键再按住↑键(始终按住↓键),执行器将快速关闭请参阅附后功能表总图※常规参数设定与更改:1. 给定、显示、阀位对应关系设定(定位器初始设定适合于正作用阀门,即阀杆上行打开阀门,如实际阀门为反作用形式,即阀杆上行关闭阀门,则需确认P2.3=Reverse。
)若:给定信号与阀门作用方向相同,定位器显示相反,先改P3.2,后改P2.3;给定信号与定位器显示相同,阀门作用方向相反,只改P3.2;定位器显示与阀门作用方向相同,给定信号相反,只改P2.3;一般的阀门出厂之前已经修改此参数无需用户再修改,但可以通过下述方法检查。
定位器起始位置可以是运行模式中任意方式。
★举例:将阀门的正作用改为反作用1) 切换至配置功能菜单·同时按住↑和↓键·点击ENTER键·等待3秒钟,计数器从3倒计数至0·松开↑和↓键·显示器显示“P1.0ACTUATOR”2) 从配置功能菜单中选择第二组参数·同时按住MODE和ENTER两键·点击↑键·显示器显示“P2._ SETPOINT”·松开MODE和ENTER两键·显示器显示“P2.0 MIN-PGE”3) 从第二组配置参数中选择阀门作用方式P2.3·按住MODE键·点击↑键3次·显示器显示“P2.3ACTION”·松开MODE键4) 更改阀门作用方式·点击↑或↓键选择“REVERSE”5) 切换至“P2.8EXIT”存储并退出·按住MODE键·点击↑或↓键多次直至显示器显示“P2.8 EXIT”·松开MODE键·用↑或↓键选择NV-SAVE·按住ENTER键直到计数器倒计数结束后松开2. 如有必要,进入“P7.6”调整控制偏差带3. 如有必要,进入“P7.7”调整控制死区4. 如有必要,进入“P1.3”测试设定效果。
5. 恢复出厂参数设置:如果因定位器参数设置错误而造成阀门无法正常工作,可通过恢复定位器出厂参数设置使其正常工作,方法如下:进入参数配置级P11.0,按下ENTER键直到倒计时结束;再进入P11.1,同样按下ENTER键直到倒计时结束;最后进入P11.3保存激活状态,至此完成定位器恢复出厂参数设置。
6. 存储设定结果:·按住MODE键·点击↑或↓键一次或多次,直到显示出“P1.4”·松开MODE键·用↑或↓键选择NV_SAVE(若选择“CANCEL”,此前所作修改将不予存储)。
·按住ENTER键3秒直到计数器倒计数结束后松开(选择“CANCEL”不存储,也需执此步骤退出参数配置级)。
前面所进行的设定和自动调整中所测得的参数将存储在EEPROM中,定位器转换到先前选择的运行级操作模式。
TZID-C系列智能定位器功能图解1.功能级分类:运行操作级:适用于初次调试及日常的检查和现场开关操作参数配置级:适用于初次调试中的参数设置及整定2.运行操作菜单:一般情况下选择1.1进行远方自动控制。
只有在执行器实际行程非常小而执行器速度太快,控制容易发生振荡时选择1.0控制模式。
操作模式中的1.2和1.3均可运用键盘开启或关闭执行器,但1.2专用于手操,而1.3专用于检测定位器反馈杆实际运行范围是否超出传感器的最大检测范围,以便校正反馈杆的连接,取得最佳的控制效果。
3.参数配置级:参数配置共分11组,用P1._,P2._…P11._(P为PARAMETER首字母)表示,而每一组又分若干项,如P1._分P1.0,P1.1,…P1.4共5项,P2._分P2.0,P2.1…P2.8共9项。
有些项中又可分若干分项以供选择,如P1.0中可选择LINEAR用于角度变换小于56°,选择ROTORY用于角度变换大于56°,又如P1.5EXIT中可选择NV_SAVE(Non-Volatile save)存盘退出或CANCEL不存盘退出。
有些项中只有数值以供调整,如分程调节中给定信号为4-12mA,则P2.0中的数值应设为4mA,而P2.1中的数值应设为12mA,如给定信号为4-20mA,则P2.0中的数值应设为4mA,而P2.1中的数值应设为20mA。
参数配置菜单注:除P1.1,P2.3,P3.2,P8.2外,一般其他的参数无需改动。
P1.1为自动整定程序,P2.3为执行器的正反作用形式(正作用为输出口1气压增加阀杆下行),P3.2为正反调节形式(正作用为4毫安对应阀位0%),P8.2为阀位反馈正反作用形式(正作用阀位0%输出4毫安)自整定过程显示及文字描述:当选择某种自动整定程序运行时(参见参数P6.4),将显示下面的数字代码:当定位器在调试或运行中出现错误时,将会显示下面错误代码※常见故障分析执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为1.3(手动),检查OUT1和OUT2是否有一个总是漏气。