基于YL235A的机械手分拣生产线设计论文
基于YL235A的机械手分拣生产线设计论文
基于YL-235A设备的工件分拣生产线设计本文的设计任务就是设计一条能够自动对于金属与非金属、黑色以及非黑色工件进行识别,并且将这些工件进行分拣堆放的自动生产线。
执行系统与电控系统组成了生产线。
PLC自从问世以来就在自动控制各个行业发挥着难以取代的核心控制作用。
PLC 运行可靠,适用于各种恶劣的工业环境,PLC和工控机(IPC)相比,其运行可靠、可扩展性好、便于电气连接、控制更专业,但是工控机良好的人机界面,方便高级语言都是PLC所不能比拟的。
组态软件在很多场合应用于控制,可整个控制的中心往往还是PLC,组态软件(上位机)所起的控制作用很小。
人机界面一般用于简单的动作控制,工艺参数的编制,配方的设定等等,虽然在概念上属于控制范畴,但它并未真正起到核心控制作用,因为真正长期的自动运行控制是由PLC完成。
我们不经常使用工控机作为核心控制部分的原因有两点:第一,工控机不适于在很恶略的环境下运行;第二,工控机经常采用的Windows系统并不能够让人放心,其长期运行效果并不好。
尽管PLC、IPC在自动化控制中扮演不同角色,在许多运行连续时间较短,环境相对比较好的地方,人们还是希望使用IPC进行核心控制。
使用IPC进行核心控制有很多种实现方式,当然其中最为简单的办法就是使用组态软件。
在工厂和企业里面PLC一直是实现自动化的有效方式,而且目前国内真正懂得PLC的人才太少,希望针对本次实训对我们自动化的人大有裨益!1 工件分拣生产线的工作流程及工作原理本次毕业设计项目亚龙YL-235A工件分拣生产线设计主要包含了电气自动化专业学习中所涉及的诸如电机驱动、机械传动、气动、触摸屏控制、可编程控制器、传感器,变频调速等多项技术,为我们提供了一个典型的综合设计环境,使学生对过去学过的诸多单科的专业和基础知识,在这里能得到全面的认识与巩固、综合的训练和实际运用。
亚龙YL-235A型光机电一体化实训考核装置既包含了机电一体化专业所涉及的基础知识、专业知识和基本的机电技能要求,也体现了当前先进技术在生产实际中的应用。
YL235A设备设计机械手传送带物料分拣任务机电一体化专业毕业论文
毕业论文声明本人郑重声明:1.此毕业论文是本人在指导教师指导下独立进行研究取得的成果。
除了特别加以标注地方外,本文不包含他人或其它机构已经发表或撰写过的研究成果。
对本文研究做出重要贡献的个人与集体均已在文中作了明确标明。
本人完全意识到本声明的法律结果由本人承担。
2.本人完全了解学校、学院有关保留、使用学位论文的规定,同意学校与学院保留并向国家有关部门或机构送交此论文的复印件和电子版,允许此文被查阅和借阅。
本人授权大学学院可以将此文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本文。
3.若在大学学院毕业论文审查小组复审中,发现本文有抄袭,一切后果均由本人承担,与毕业论文指导老师无关。
4.本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。
论文中凡引用他人已经发布或未发表的成果、数据、观点等,均已明确注明出处。
论文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的研究成果。
对本文的研究成果做出重要贡献的个人和集体,均已在论文中已明确的方式标明。
学位论文作者(签名):年月关于毕业论文使用授权的声明本人在指导老师的指导下所完成的论文及相关的资料(包括图纸、实验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属华北电力大学。
本人完全了解大学有关保存,使用毕业论文的规定。
同意学校保存或向国家有关部门或机构送交论文的纸质版或电子版,允许论文被查阅或借阅。
本人授权大学可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存或编汇本毕业论文。
如果发表相关成果,一定征得指导教师同意,且第一署名单位为大学。
本人毕业后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为大学。
本人完全了解大学关于收集、保存、使用学位论文的规定,同意如下各项内容:按照学校要求提交学位论文的印刷本和电子版本;学校有权保存学位论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存或汇编本学位论文;学校有权提供目录检索以及提供本学位论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版,允许论文被查阅和借阅。
工业机器人智能分拣码垛生产线的设计与实现
通过模拟实际生产情境,评 估系统的码垛策略和路径规 划的优化效果
对机器人分拣性能进行测试
进行码垛效率测试
实验中还需关注系统的稳定 性和鲁棒性
2系统架构设计
通过引入一定的噪声和变化,测试系统在复杂环境中的表现,确保其对于生产线上的变化 和干扰具有一定的适应性 进行实时性测试 检测系统响应时间,确保在实际工作中具备足够的实时性,适应高速生产线的要求 针对机器人的分拣性能,分析实验结果包括正确分拣率、漏检率等指标 通过统计不同形状、颜色和尺寸的产品在分拣过程中的准确性,评估系统的智能分拣能力 如果出现漏检情况,可能需要优化物体识别算法或分拣策略 对码垛效率进行详细分析 关注码垛速度、堆叠质量等参数,评估系统在不同生产需求下的码垛性能 如果出现码垛不稳定或速度过慢的问题,可能需要优化路径规划算法或调整码垛策略
(1)运行条件:寿命10年(按每年300天计算),2班制运行,负载稳定。(2)初始数据:辊圆周 力F=1.7kN。带速V=1.4m/s;滚筒直径D=220mm 1、电动机型号和机座型式的选择:Y系列三相异步电动机按已知要求和运行条件选用 2.确定发动机功率 (1)传动装置总效率:总η=η皮带×η2轴承×η小齿轮×η联轴节×η滚轮 =0.96×0.992×0.97×0.99×0.95=0.86(2)电机所需运转功率:Pd=总 PV/1000η=1700×1.4/1000×0.86=2.76kW3 电机转速确定:辊轴转速:Nw=60×1000V/πD=60×1000×1.4/π×220=121.5r/min[2]-皮带传 动比Iv=2~4,单齿比单直齿轮Ic=3~5,全速比可以接受
2系统架构设计
(1)可选择若干容量相同、 特性相近的试验台对齿轮
基于亚龙yl235aYL-235A-机械手程序A1最简便的程序 - 副本

基于亚龙yl235aYL-235A-机械手程序A1最简便的程序亚龙YL-235A 型光机电一体化实训考核装置下面写一个这个原理可以运用在比赛上各辅助继电器的作用: M1 料盘电机转动M2 机械手伸前M3 机械手下降M4 机械手爪夹紧M5 机械手上升M6 机械手缩回M7 机械手向右摆M8 机械手伸前M9 机械手下降M10 机械手松开M11 机械手上升M12 机械手缩回M13 机械手左摆我将会写出最简的和最稳定的通用程序这样有助于比赛的时候灵活运用比赛的时候尽量少用传感器YL--235A我们只用三个传感器就可以搞定单料的所有工作方式托架检测要一个落料口要一个还有就是电感的检测金属的要一个至于机械手写程序的时候要不要无所味,但是有初始位置的就另说了但是主程序就没必要写机械手上的传感器了那样太浪费时间了而且谁能确保传感器没有问题???我的QQ:406565142 如有疑问我们可以探讨和交流(不管题目怎么出他总归要打入料槽或者用机械手抓走,他归根到底就是分捡) 继这种思想我设计出了这种,简单稳定不容易出错的程序,菜单式的程序,他要什么直接在上面填就可以了类似于点菜至于到底简不简单你看了就知道了,你看"万变不离其宗"符不符合这个程序X0 启动 Y0 红灯x1 停止 Y1 绿灯x2 夹紧 Y2 电机X3 上升 Y4 松开X4 下降 Y5 左移X5 伸前 Y6 右移X6 缩后 Y7 上升X7 推金伸 Y10 下降X10 推金缩 Y11 伸前X11 推白伸 Y12 缩后X12 推白缩 Y13 推金X13 推黑伸 Y14 推白X14 推黑缩 Y15 推黑X15 托检 Y20 电机正转X16 左位 Y21电机反转X17 右位 Y22 高X20 货检 Y23 中X21 检金 Y24 低X22 检白X23 检黑QQ:406565142 邮箱:406565142@M0M113(k13)1(k1) 移位指令说明:初始值:M0 M1 M2 M3 M4 M5 M6 M7 M8 M9 M10 M11 M12 M131 0 0 0 0 0 0 0 0 0 0 0 0 01 当接通X0002 T0开定时3 当1秒时间到 T0 发出一个脉冲给SFTL 并且自己断开又重新定时M1得电,并且断开M0M0 M1 M2 M3 M4 M5 M6 M7 M8 M9 M10 M11 M12 M13 0 1 0 0 0 0 0 0 0 0 0 0 0 00 0 1 0 0 0 0 0 0 0 0 0 0 00 0 0 1 0 0 0 0 0 0 0 0 0 0….….….M0 M1 M2 M3 M4 M5 M6 M7 M8 M9 M10 M11 M12 M13 0 0 0 0 0 0 0 0 0 0 0 0 0 1M0 M1 M2 M3 M4 M5 M6 M7 M8 M9 M10 M11 M12 M13 1 0 0 0 0 0 0 0 0 0 0 0 0 0K13 是代表机械手要做工13个步骤才能完成K1 代表每次移一位,就每次做一个动作T0 k10 代表每个动作时间间隔是1秒(这个可以改)。
毕业设计(论文)-基于机器人货物分拣系统设计[管理资料]
![毕业设计(论文)-基于机器人货物分拣系统设计[管理资料]](https://img.taocdn.com/s3/m/8d4cc7bffe4733687f21aa46.png)
安徽工商职业学院应用工程学院毕业设计题目:基于机器人货物分拣系统设计系别:应用工程学院专业:机电一体化班级:15机电2班姓名:学号:指导教师:日期:目录摘要 (4)第1章引言 (4)、现状及应用 (4) (5) (6) (7)第2章基于机器人货物分拣系统设计 (7) (7) (7) (8) (8) (9) (9) (9) (9) (10) (11) (11) (11) (12) (12)第3章设备的控制系统程序编写 (12) (12)TIA Portal软件的使用 (13),插入并组态PLC (13) (14) (15) (15) (16) (18) (20)X_SIGHT软件程序的编写 (20) (22) (23) (23) (27)第4章触摸屏设计 (29)第5章总结 (31) (31) (31) (31)摘要当代科学技术发展的特点之一就是机械技术,电子技术和信息技术的结合,机器人就是这种结合的产物之一。
现代机器人都是由机械发展而来。
与传统的机器的区别在于,机器人有计算机控制系统,因而有一定的智能,人类可以编制动作程序,使它们完成各种不同的动作。
随着计算机技术和智能技术的发展,极大地促进了机器人研究水平的提高。
现在机器人已成为一个庞大的家族,科学家们为了满足不同用途和不同环境下作业的需要,把机器人设计成不同的结构和外形,以便让他们在特殊条件下出色地完成任务。
机器人成了人类最忠实可靠的朋友,在生产建设和科研工作中发挥着越来越大的作用。
搬运机器人不但能够代替人的某些功能,有时还能超过人的体力能力。
可以24小时甚至更长时间连续重复运转,还可以承受各种恶劣环境。
当机器人一点与其他传感器结合到一起后,它也不再是简简单单的机器设备了,比如与视觉搭配起来过后它就能实现和人一样的分辨物体、、、、、、、为了避免危险恶劣的工作环境导致的工伤事故和职业病,保护工人的身心安全,对一些特殊工种,工作量大、环境恶劣、危险性高、人类无法涉足的工作领域都可由工业机器人代替。
基于YL-235A实训设备物料分拣的几种方法
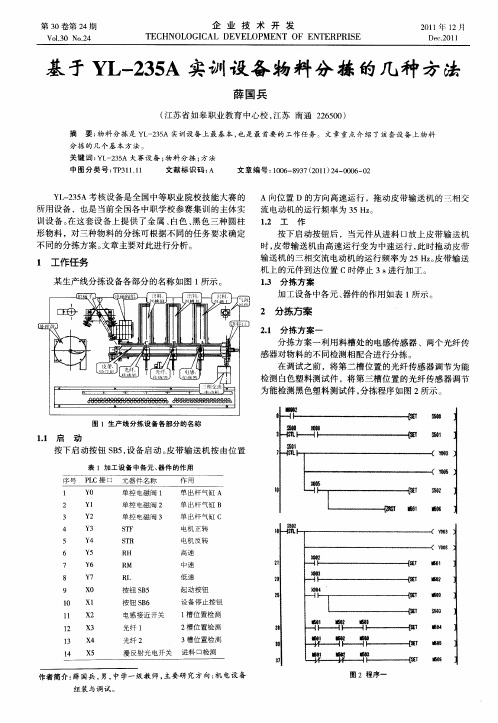
( 江苏省 如皋职业教育 中心校 , 江苏 南通 260 ) 2 50
摘 要: 物料 分拣 是 Y 一 3A 实训 设 备 上 最 基本 , 是 最 首要 的 工作 任 务 。 文 章 重 点 介 绍 了该 套 设 备 上 物 料 L 25 也
分拣 的几 个 基 本 方 法 。
关键 词 : L 2 5 Y 一 3 A大 赛设 备 ; 料 分拣 ; 法 物 方
所用 的时间 , 当物料被 拖动到槽 1 位置处时 , 如果 x 5常
闭触点在 1S内能够 闭合 ,则说 明物料 为黑色塑料测试 5
∞
件 , 5 3将被置位 ;如果 X M0 5能跟随物料运行 到槽 1 位 置, X 当 2动作 则物料 为金属件 , 5 1 M 0 将被置位 ; 如果 x 5 } — — — — ——— — — —— — —— — —∞t _ — — — —— —— — — —— —— — — — I c m Ⅲ ———————— 衄 ∞ ———————— * 能跟随物料运行到槽 1 位置 , 2不动作 则物料为 白色塑 抖 } , X 曲 l } ∞ m 如 1 # 卜嚣— L——伽 ’ 搠 1 料件 , 52将被置位 。 M0 目 ————|非———————一 一 I l _ 22 当检测 白色工件 的光纤传感器在槽 1 .2 . 位置时 叫 — — ——— —— —— ————— —— —— ——— — —— ——— —— — —— —— 伸 ≈ 此时调节料 口漫反射光 电传感器的检测距 离 ,使 漫 图 5程 序四 反射光 电传感器能检测 到槽 1 位置的金属测试件 ,不能 ( 下转第 9页)
参 考 文献 -
4 电子通信产品 E D防护的基本要求 S
① 在产 品的设计 阶段就应该考虑产品生产 中所运用 1 E D对 电子产 品的危害及 防静 电设计f1 J企业科技 . 电子元器件 的 E D防护能力 , S 企业单位最好是能有一个 … 郑泓.S 与发展 , 1 , 2. 2 0( ) 0 2 自己的 电子元器件 E D顺序表 。 S 敏感 的元器件是 E D防 S 2 电子通讯产 品的 E D防护设计 [. S J广东科技 , 0 , ] 2 8 0 护 的要 害 , 一个 注重 E D防护 的电子元器件 , 敏感元 [】李东奎. S 在 件较少的情况下 , 对设计研发者无疑会减轻压力 。 (2. 1)
《自动分拣机械手结构设计8400字(论文)》

自动分拣机械手结构设计目录1 绪论 (2)2 总体方案设计与指标 (4)2.1 总体设计规格与相关参数 (4)2.2总体方案设计 (4)2.2.1主体功能 (4)2.2.2执行机构 (5)2.2.3驱动机构 (6)2.2.4控制系统 (6)3 机构分析 (9)3.1机械手总体设计 (9)3.1.1机械手基本形式的选择 (9)3.1.2机械手的主要部件及运动 (9)3.1.3驱动机构的选择 (9)3.1.4机械手的技术参数列表 (10)3.2机身的总体设计 (10)4 关键部件设计与校核 (12)4.1选择手抓的类型及夹紧装置 (12)4.2 手抓的力学分析 (13)4.3机械手手抓夹持精度的分析计算 (14)5 结论 (16)参考文献 (17)1 绪论现代化的计算机网络科学和信息技术的确是一场新型产业革命,将整个西方世界的知识经济由传统资本主义经济模式引入并带到了现代知识经济的新发展时代。
在现代电子信息世界的各个领域,从20世纪时代中的一个新型无线电通信时代也已经开始直到进入21世纪以家用计算机和其他信息电子技术应用为设计核心的一个现代化和智能化新型家用电子系统时代。
而传统的机械手控制系统则逐渐发展成熟到与电脑进行互联,使得机械手控制的系统变得更加的智能化,操作也变得更加简易方便。
随着工业自动化的进一步发展,机械手(或称工业机器人)的应用将更加普遍,尤其随着我国的物流行业和仓储行业的进一步发展,西欧、日本、苏联和中国等偏远地区的机械手也已经开始了百花争放,未来整个人类经济社会将不断更新各种各样的新型分拣机械手。
本项目中所设计的自动分拣机械手隶属于搬运机械手。
所谓的搬运式机械手,就是把一个机械手直接安装到一个移动式的平台之上。
这种架构使得机械手具备了很大的可以移动操纵空间及较高的运动冗余性,并且同时还具备了移动和可以操纵的功能,这样会使它比其他传统机械手更加优于现代化的机械手,因此在危险工程作业、制造商、服务业等领域具有广泛的应用和发展前景。
自动分拣机械手的设计
本文通过前期的市场调研,确定了分拣机械手的系统结构,完成了机械手的整体设计工作,包括传动部分、执行部分、驱动部分等;另外,根据系统结构,完成了自动分拣机械手样件的加工和组建。
1.4 机械手的发展趋势
现代计算机技术的产业革命,将世界经济从资本经济带入到知识经济时代。在电子世界领域,从20世纪中的无线电时代也进入到21世纪以计算机技术为中心的智能化现代电子系统时代。而机械手控制系统则逐步发展为与计算机互联,使机械手控制系统更加智能化,操作更加简单方便。随着自动化的发展,机械手(机器人)应用将更加普遍,尤其随着汽车行业和塑胶行业的发展,西欧、日本、苏联和中国等地域机械手开始百花争放,可以这样讲,未来的人类社会将是机械手的时代。
题目:自动分拣机械手的设计
摘要
机械手是一种模仿人体上肢运动的机器,它能按照预定要求输送工种或握持工具进行操作的自动化技术设备,对实现工业生Байду номын сангаас自动化,推动工业生产的进一步发展起着重要作用。因而具有强大的生命力,受到人们的广泛重视和欢迎。
目前来讲,工业机械手可以代替人工的繁重劳动,显著减轻工人的劳动强度,提高劳动生产率和自动化水平。此外,它能在高温、低温、深水、宇宙、反射性和其他有毒、有污染环境条件上进行操作,更显其优越性,有着广阔的发展前途。虽然市场上机械手很多,但成本较高,一些小的行业或企业无力承担。正是基于此种考虑,本论文主要是研究设计了一种小型、廉价的自动分拣机械手。该机械手通过单片机控制使机械手具有智能化从而对件进行智能分拣,避免重复劳动,提高工作效率,尤其是成本较低。因此,非常适合小型企业单位的应用,具有良好的市场价值和应用前景。
1.2 自动分拣机械手的设计目的与意义
该毕业设计的自动分拣机械手属于搬运机械手。所谓搬运机械手,就是将机械手安装在移动平台之上。这种结构使机械手拥有很大的操作空间和高度的运动冗余性,并同时具有移动和操作功能,这使它优于传统的机械手,因此在危险作业、制造业、服务业等行业具有广阔的应用前景。但由于结构复杂、强耦合、非线性、非完整性等问题的存在,都使得对搬运机械手的研究具有相当的挑战性。
快递智能分拣机械手的设计
快递智能分拣机械手的设计摘要:快递全自动分拣设备占用场地大、价格昂贵,在县市级快递分拣中心,无法得到推广应用,依然采用人工分拣。
移动式快递智能分拣机械手,在需要使用时,将此机械手推至场地中心进行快递分拣,不用时放置在箱柜中保存,占用场地小、价格适宜,便于在小型快递分拣中心推广应用,提升物流自动化水平。
关键词:PLC、机械手;快递;报警器1 引言2023年2月15日凌晨4点左右,在浙江宁波中通快递分拣中心,一位60岁的中通快递员工在从事快递分拣工作中突然倒地,同事立即拨打120急救电话,但是经过医院抢救无效,最终不幸离世,引起社会广泛关注。
这件事情再次引发人们对于快递员工作条件、工作强度和安全问题的关注。
快递员是现代物流产业的重要一环,快递员工作具有以下特点:1.工作强度大;需要长时间的走动、搬运、分拣,经常要超时加班。
2.工作时间长;基于快递的时效性,部分快递员工需要在深夜工作。
3.工作环境复杂;复杂的工作环境容易导致快递员受到影响,增加了工作风险。
为了保障快递员的权益和安全,急需采取一些措施改善他们的工作条件。
一方面社会应给予快递员更多的人文关怀,另一方面快递企业更应该优化工作流程、提高物流自动化水平,以降低快递员的工作强度。
目前,大型快递企业在地区级、省级快递分拣中心,基本已运用了快递全自动分拣设备,实现快递的自动化分拣。
但是,由于快递全自动分拣设备占用场地大、价格昂贵等原因,在县市级快递分拣中心,无法得到较好地推广应用,依然采用人工分拣的工作方式,既增加了快递员劳动强度,而且工作效率低下。
为了减小分拣设备的场地占用,并降低价格,我们将设计移动式快递智能分拣机械手,在需要使用时,将此机械手推至场地中心进行快递分拣,不用时放置在箱柜中保存。
它不但实现了快递的智能分拣,全面提高物流自动化水平,而且价格较低,便于在县市级小型快递分拣中心推广应用,降低底层快递员的工作强度。
2 快递智能分拣机械手的设计原理快递智能分拣机械手(如图1)工作时,快递员只需将快递包裹放在传送带上,传送带上的快递包裹经过扫码探头,扫码探头扫码识别出快递包裹将要投递的区域,并将信息发送给机械手,机械手夹取快递包裹放置在不同的容器内,实现快递分拣。
1、绪论:亚龙YL-235A光机电一体化设备的介绍
4.控制元件
(1)可编程控制器PLC
(2)变频器
采用三菱FX2N-48MR 继电器输出,所有接口采 用安全插连接
三菱E700-0.75KW 控制 电机带动传送带转动,所 有接口采用安全插连接
5.指令开关和指示元件
本实训装置中用到的指令开关有复位按钮、自锁按钮、转 换开关和急停开关,指示元件有警示灯、指示灯和蜂鸣器。
13-16rpm 380v 0.18/0.15A 25W 50/60HZ
Part 03
各个机构的组成
01 送料机构 02 机械手搬运机构 03 物料传送及分拣机构
1.送料机构
转盘 调节支架
物料 出料口物料 检测传感器 物料检测支架
直流电机
放料转盘: 转盘中共放三种物料:金属物料、白色非 金属物料、黑色非金属物料。 驱动电机: 电动机采用24V 直流减速电动机,转速 6r/min;用于驱动放料转盘旋转。 物料支架: 将物料有效定位,并确保每次只上一个物 料。 出料口传感器: 物料检测为光电漫反射型传感器,主 要为PLC提供一个输入信号,如果运行中,光电传感器 没有检测到物料并保持若干秒钟,则应让系统停机然 后报警。
各元件的结构和使用
01
气动执行元件
02
气动控制元件
03
各种传感器
04
控制元件
05
指令开关和指示元件
06
传动元件
1.气动执行元件
气缸、气手指、旋转气缸; 气源处理组件 (油水分离器) 空气压缩机
气 缸 的 分 类
分类 按活塞的形式 按活塞杆的形式 按有无缓冲装置
活塞式
柱塞式
膜片式 单杆 双杆
无缓冲 单侧缓冲 双侧缓冲
机械手搬运机构的实际应用
自动生产线分拣站控制系统设计论文(DOC 49页)

河南工业职业技术学院Henan Polytechnic Institute毕业设计(论文)自动生产线分拣站控制系统设计班级__机电1003班________姓名__杨金光________指导教师__朱文琦________自动生产线分拣站(PLC+直流伺服电机+气动元件)控制系统设计摘要面对激烈的市场竞争,一个企业的生产效率是其能否生存和发展的决定性因素。
要想提高生产效率就必须提高各个环节的效率,产品自动化控制系统的使用是现在工业生产经常使用的控制系统之一。
比如工件分拣这个环节,有没有自动分拣系统就成为判断条件之一,也是必须的条件。
本文在纵观了近年来自动化发展状况的基础上,结合自动化方面的设计,对自动化技术进行了系统的分析,提出了用气动驱动和PLC控制的设计方案。
采用整体化的设计思想,充分考虑了软、硬件各自的特点并进行互补优化。
对物料分拣的整体结构、执行结构、驱动系统和控制系统进行了分析和设计。
在其驱动系统中采用气动驱动,采用气压驱动系统,具有动作迅速、准确、结构简单、安装方便、可靠等一系列优点。
最后提出了一种简单、易于实现、理论意义明确的控制策略。
通过以上部分的工作,得出了经济型、实用型、高可靠型物料分拣系统的设计方案,对其他经济型PLC控制系统的设计也有一定的借鉴价值。
关键词: 物料分拣,气动驱动,可编程控制器(PLC),自动化控制ABSTRACTPLC control is the most commonly used industrial automation control method, because of its convenient control to withstand an adverse environment, it is better than MCU control in the industrial. PLC traditional relay control technology, computer and communication technologies are integrated specifically for industrial control and design, have strong function, common flexible, high reliability and environmental adaptability, and programming simple, easy to use and small size, light weight, a series of low-power advantages in industrial applications become more extensive.This paper focuses on the PLC in the canned beverage production, The design of an automatic sorting device with low cost and high efficiency is presented in the paper, which regards programmable logic controller ( PLC) as the master controller and combines pneumatic device, sensing technology, position control and other technology to implement automatic selecting of the products live. The device is characteristic of high automation, steady running, high precision and easy control, which can fulfill the requirement according to different situations with little modifications.Key words:programmable logic controller,sorting device,control system,sensors目录摘要.II目录V第一章绪论1§1.1课题研究的背景1§1.2课题研究的目的和意义1第二章自动化分拣系统的构成与工作原理2§2.1自动化生产线的核心技术2§2.2自动化分拣单元工作过程2§2.3分拣单元的结构组成3§2.3.1传送和分拣机构4§2.3.2驱动模块5§2.3.3电磁阀组5§2.4分拣中的传感器6§2.4.1光纤传感器6§2.4.2光电传感器7§2.4.3磁感应接近式传感器8§2.4.4 金属传感器8第三章执行系统的分析与设计10§3.1气动技术在气动装置中的设计10§3.1.1 气泵的认识与选择10§3.1.2空气压缩机11§3.1.3储气罐11§3.1.4气动控制元件的认识12§3.2 分拣站的执行元件15§3.2.1 气动执行元件15§3.3传动机构17§3.3.1直流伺服电机的认识与选择17§3.4伺服控制器的认识20§3.5旋转编码器概述20第四章控制系统的分析与设计22§4.1分拣单元的 PLC控制系统设计的基本原则22§4.1.1分拣站的工作原理22§4.1.2 PLC机型的选择22§4.1.3确定PLC的容量25§4.1.4 确定PLC的I/O模块25§4.1.5 PLC种类及型号的确定27§4.2 PLC的I/O 接线及气路图27§4.3分拣单元的编程要点31§4.3.1 高速计数器的编程31§4.3.2程序结构34§4.4 编写和调试PLC控制程序36§4.4.1 编写程序的思路36§4.4.2 功能测试程序的结构37§4.4.3调试与运行37总结.. 39参考文献41致谢43附录 (37)第一章绪论§1.1课题研究的背景在时代的前进过程中自动化科学技术已对整个科学技术的理论和实践做了重要贡献,并为人类社会带来了巨大利益。
基于亚龙YL-235A的工件识别系统设计
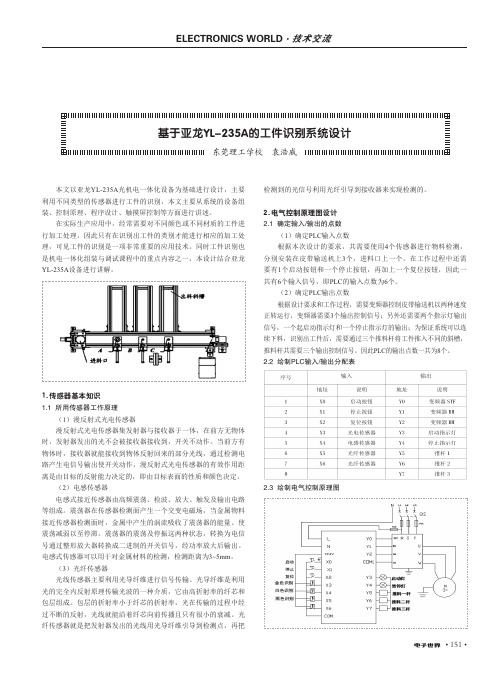
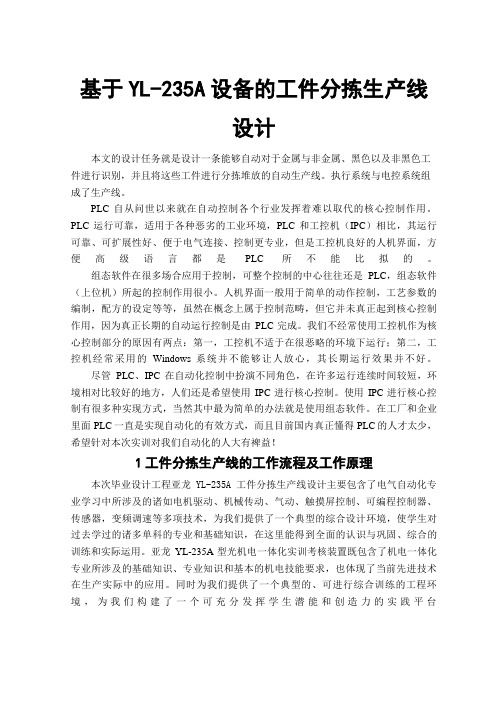
• 151•本文以亚龙YL-235A光机电一体化设备为基础进行设计,主要利用不同类型的传感器进行工件的识别,本文主要从系统的设备组装、控制原理、程序设计、触摸屏控制等方面进行讲述。
在实际生产应用中,经常需要对不同颜色或不同材质的工件进行加工处理,因此只有在识别出工件的类别才能进行相应的加工处理,可见工件的识别是一项非常重要的应用技术。
同时工件识别也是机电一体化组装与调试课程中的重点内容之一,本设计结合亚龙YL-235A设备进行讲解。
1.传感器基本知识1.1 所用传感器工作原理(1)漫反射式光电传感器漫反射式光电传感器集发射器与接收器于一体,在前方无物体时,发射器发出的光不会被接收器接收到,开关不动作。
当前方有物体时,接收器就能接收到物体反射回来的部分光线,通过检测电路产生电信号输出使开关动作,漫反射式光电传感器的有效作用距离是由目标的反射能力决定的,即由目标表面的性质和颜色决定。
(2)电感传感器电感式接近传感器由高频震荡、检波、放大、触发及输出电路等组成。
震荡器在传感器检测面产生一个交变电磁场,当金属物料接近传感器检测面时,金属中产生的涡流吸收了震荡器的能量。
使震荡减弱以至停滞。
震荡器的震荡及停振这两种状态,转换为电信号通过整形放大器转换成二进制的开关信号,经功率放大后输出。
电感式传感器可以用于对金属材料的检测,检测距离为3~5mm。
(3)光纤传感器光线传感器主要利用光导纤维进行信号传输。
光导纤维是利用光的完全内反射原理传输光波的一种介质,它由高折射率的纤芯和包层组成。
包层的折射率小于纤芯的折射率,光在传输的过程中经过不断的反射,光线就能沿着纤芯向前传播且只有很小的衰减。
光纤传感器就是把发射器发出的光线用光导纤维引导到检测点,再把检测到的光信号利用光纤引导到接收器来实现检测的。
2.电气控制原理图设计2.1 确定输入/输出的点数(1)确定PLC输入点数根据本次设计的要求,共需要使用4个传感器进行物料检测,分别安装在皮带输送机上3个,进料口上一个。
毕业设计(论文) 自动分拣机械手的设计
毕业设计(论文)自动分拣机械手的设计自动分拣机械手的设计旨在解决物品分拣过程中的人力繁重和效率低下的问题。
随着电子商务的迅速发展以及物流行业的日益繁忙,传统的人工分拣方式已经无法满足快速准确的分拣需求。
因此,自动分拣机械手的研究和设计变得至关重要。
本文将详细介绍自动分拣机械手的设计主题和背景,并概述此研究的目的和意义。
通过本文的研究,我们将摸索出一种可行的自动分拣机械手设计方案,使分拣过程更加高效、准确和智能化。
这将对物流行业的发展和提升分拣效率具有重要的指导和应用意义。
通过对自动分拣机械手设计的研究,我们将展示其优势,包括提高分拣效率、降低人力成本、减少人为错误,并提高物流行业的整体竞争力。
同时,我们将探索可能的挑战和限制,以及未来进一步改进和发展的方向。
本文的研究结果将为自动分拣机械手的设计和使用提供有益的指导,并为相关领域的研究和应用提供参考。
希望通过本文的研究,能够推动自动分拣技术的进步和创新,进一步提升物流行业的发展水平。
本部分概述关于自动分拣机械手的设计的相关文献资料,介绍现有的设计方法和技术,并分析其优缺点。
本文将详细讲解自动分拣机械手的设计原理,包括其结构、工作原理、运动控制等方面的内容。
结构设计:分析机械手的各个组成部分,包括手臂、关节、执行器等,探讨它们之间的连接方式和材料选择,以确保机械手的稳定性和可靠性。
工作原理:介绍机械手在执行分拣任务时的工作原理。
包括分析机械手的传感器系统,以便准确地感知待分拣物品的位置和特征,并探讨机械手的决策逻辑和动作策略。
运动控制:探讨机械手的运动控制方法,包括位置控制、速度控制和力控制等。
讨论各种控制算法和技术,以实现机械手的高效准确运动。
通过对自动分拣机械手的设计原理进行详细讲解,希望能为相关研究和实际应用提供有价值的参考。
本章将介绍自动分拣机械手整体系统的设计,包括硬件设计和软件设计两个方面,详细说明各个组成部分的功能和相互关系。
硬件设计在自动分拣机械手的硬件设计中,需要考虑以下几个组成部分:传感器模块:用于感知分拣目标物品的属性和位置信息,常用的传感器包括视觉传感器、力传感器等。
基于亚龙YL-235A的连续下料与分拣程序设计
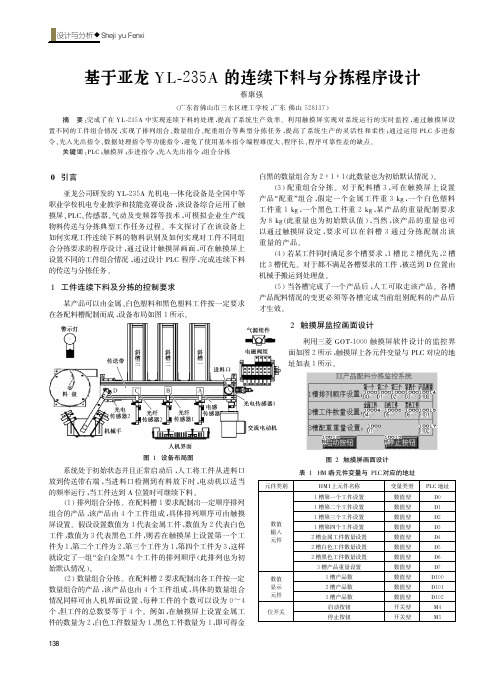
图 3 程序结构图
3 .3 主要环节程序设计 (1) 工件识别程序设计 。 三种工件的识别主要是利用入料
关键词 :PLC ;触摸屏 ;步进指令 ;先入先出指令 ;组合分拣
0 引言
亚龙公司研发的 YL‐235A 光机电一体化设备是全国中等 职业学校机电专业教学和技能竞赛设备 ,该设备综合运用了触 摸屏 、PLC 、传感器 、气动及变频器等技术 ,可模拟企业生产线 物料传送与分拣典型工作任务过程 。 本文探讨了在该设备上 如何实现工件连续下料的物料识别及如何实现对工件不同组 合分拣要求的程序设计 ,通过设计触摸屏画面 ,可在触摸屏上 设置不同的工件组合情况 ,通过设计 PLC 程序 ,完成连续下料 的传送与分拣任务 。
(2) 现场试验人员应熟悉不同厂家 、型号套管结构 、测试方 法 ,常见干扰类型及排除方法 ,避免人为因素造成对设备健康 状况的误判 、错判 。
(3) 现场测量变压器套管介质损耗因数时应将变压器绕组 连同中性点短接后接高压引线 ,以避免变压器绕组电感 、变压 器本体电容对套管介质损耗和电容量的影响 。
机电信息 2015 年第 36 期总第 462 期 1 39
Sheji yu Fenxi ◆ 设计与分析
测试时应采用类工频电源 ,排除工频干扰信号 。 目前市场上的 相关测试设备大多能做到这一点 。 4 .1 .2 接地不良引起
首先是仪器接地不良问题 ,在进行介损测试时 ,仪器接地 不良常会产生较大误差 ,因此 ,在测试过程中应将介损仪可靠 接地 ;如附近接地引下线表面有油漆等 ,应用锉刀将表面油漆 清除后再接地 ,保证接地良好 ;另测试结果有异常时 ,也可在仪 器上多接一个接地点 ,排除地网引下线接地不良干扰 。
YLA的机械手分拣生产线设计本科课程设计
基于YL-235A设备的工件分拣生产线设计本文的设计任务就是设计一条能够自动对于金属与非金属、黑色以及非黑色工件进行识别,并且将这些工件进行分拣堆放的自动生产线。
执行系统与电控系统组成了生产线。
PLC自从问世以来就在自动控制各个行业发挥着难以取代的核心控制作用。
PLC运行可靠,适用于各种恶劣的工业环境,PLC和工控机(IPC)相比,其运行可靠、可扩展性好、便于电气连接、控制更专业,但是工控机良好的人机界面,方便高级语言都是PLC所不能比拟的。
组态软件在很多场合应用于控制,可整个控制的中心往往还是PLC,组态软件(上位机)所起的控制作用很小。
人机界面一般用于简单的动作控制,工艺参数的编制,配方的设定等等,虽然在概念上属于控制范畴,但它并未真正起到核心控制作用,因为真正长期的自动运行控制是由PLC完成。
我们不经常使用工控机作为核心控制部分的原因有两点:第一,工控机不适于在很恶略的环境下运行;第二,工控机经常采用的Windows系统并不能够让人放心,其长期运行效果并不好。
尽管PLC、IPC在自动化控制中扮演不同角色,在许多运行连续时间较短,环境相对比较好的地方,人们还是希望使用IPC进行核心控制。
使用IPC进行核心控制有很多种实现方式,当然其中最为简单的办法就是使用组态软件。
在工厂和企业里面PLC一直是实现自动化的有效方式,而且目前国内真正懂得PLC的人才太少,希望针对本次实训对我们自动化的人大有裨益!1工件分拣生产线的工作流程及工作原理本次毕业设计工程亚龙YL-235A工件分拣生产线设计主要包含了电气自动化专业学习中所涉及的诸如电机驱动、机械传动、气动、触摸屏控制、可编程控制器、传感器,变频调速等多项技术,为我们提供了一个典型的综合设计环境,使学生对过去学过的诸多单科的专业和基础知识,在这里能得到全面的认识与巩固、综合的训练和实际运用。
亚龙YL-235A型光机电一体化实训考核装置既包含了机电一体化专业所涉及的基础知识、专业知识和基本的机电技能要求,也体现了当前先进技术在生产实际中的应用。
基于 YL—235A 实训设备物料识别与分拣的几种方法
基于YL—235A 实训设备物料识别与分拣的几种方法本文研究了在YL-235A 中对物料进行识别和分拣的PLC程序设计。
对金属、白色塑料和黑色塑料三种物料进行传送、识别和分拣,最后进行组合打料。
文章给出了几种物料识别和分拣的程序设计方法,对学生参加技能大赛有一定指导意义。
标签:YL- 235A;物料识别;分拣;方法0 引言如今职业院校技能大赛得到了社会各方面的广泛关注和重视,作为机电一体化组装与调试竞赛项目的指定设备,YL- 235A 考核设备综合了PLC 编程、电机控制及人机界面等工业控制技术,承载了真实的生产性功能。
该设备提供了金属、白色塑料和黑色塑料黑色三种物料,可根据任务书的要求确定相应分拣方案。
本文主要分析物料的识别与分拣的几种方法,先将PLC的I/O端口分配如下。
1 物料识别1.1 用电感和两个光纤传感器配合识别物料在调试之前,调节二三槽位置光纤传感器的灵敏度。
二槽的光纤传感器可以检测金属和白色物料,三槽的光纤传感器可以检测金、白、黑三种物料。
在物料从落料口送至处理端时,根据经过的三个传感器X13、X14、X15的得电情况进行物料识别。
若M6置位,则来料为金属件;M7置位为白色塑料件;M8置位为黑色塑料件。
1.2 用漫反射传感器、电感传感器和一个光纤传感器配合识别物料漫反射传感器X12能检测到金、白、黑三种物料,将光纤传感器的灵敏度调节至只能识别金属和白色塑料件。
程序中先假设被X12识别的都是黑色塑料件,置位M8;若光纤传感器有检测信号,则先判断为白色塑料件,置位M7,复位M8;若金属传感器有检测输出,则判断来料为金属件,置位M6,复位M7和M8,识别程序参考1.1.1.3 利用漫反射传感器和电感传感器识别物料漫反射传感器能检测到皮带落料口的所有来料,但来料的颜色不同,漫反射传感器感应距离也不同,黑色物件感应距离最短。
程序中用INC自动加1指令持续计数,直至没有检测信号,将计数的值存储在D0中,如果D0值小于500,置位M8,判断为黑色塑料件。
精品基于YL235A的机械手分拣生产线设计毕业设计论文论文
精品基于YL235A的机械手分拣生产线设计毕业设计论文论文标题:基于YL235A的机械手分拣生产线设计摘要:本文设计了一条基于YL235A机械手的分拣生产线,旨在提高生产效率和减少人工成本。
首先,对YL235A机械手的特点和应用领域进行了介绍。
然后,根据实际需求,设计了整个分拣生产线的工作流程和组成部分。
接着,对机械手的动作执行和控制方法进行了详细描述。
最后,通过实验验证了该分拣生产线的性能和可行性。
关键词:YL235A机械手、分拣生产线、工作流程、动作控制、性能验证1.引言随着工业自动化的快速发展和生产工艺的不断优化,机械手在分拣生产线中起到了重要的作用。
YL235A机械手具有高承重能力、快速准确的动作执行和广泛的应用场景,因此被广泛应用于分拣生产线。
本文旨在通过设计一条基于YL235A机械手的分拣生产线,提高生产效率和减少人工成本。
2.YL235A机械手的特点和应用领域YL235A机械手是一款具有6自由度的工业机器人,具有承重能力强、动作执行准确快速的特点。
其广泛应用于物流、仓储、电子制造等领域。
3.分拣生产线的工作流程和组成部分分拣生产线主要包括物料装填区、传送带、机械手工作区、分拣仓库等几个主要组成部分。
物料在装填区被放在传送带上,传送带将物料送到机械手的工作区,机械手将物料按照预定的规则进行分拣,并将分拣后的物料放置在对应的分拣仓库中。
4.机械手的动作执行和控制方法机械手的动作执行主要包括抓取物料、移动物料和放置物料等几个基本动作。
这些动作可以通过程序控制和传感器反馈实现。
在程序控制方面,采用正逆向运动学算法进行动作规划和控制。
在传感器反馈方面,通过视觉传感器对物料进行识别和定位。
5.性能验证实验为验证分拣生产线的性能和可行性,进行了一系列的实验。
实验结果表明,通过YL235A机械手的分拣判断和动作执行,可以达到较高的分拣准确率和速度,达到了预期的效果。
结论:通过设计和实验验证,本文成功地设计了一条基于YL235A机械手的分拣生产线,提高了生产效率和减少了人工成本。
机电一体化专业毕业论文全
江西机电职业技术学院毕业论文题目:YL235A设备设计机械手传送带物料分拣任务五学校:专业:机电一体化班级:学号:学生姓名:指导教师:起止日期;2011年9月-2012年5月前言作为自动化专业的学生,PLC是我们最基础的专业课。
众所周知,PLC自从问世以来就在自动控制各个行业发挥着难以取代的核心控制作用。
PLC运行可靠,适用于各种恶劣的工业环境,PLC和工控机(IPC)相比,其运行可靠、可扩展性好、便于电气连接、控制更专业,但是工控机良好的人机界面,方便高级语言都是PLC所不能比拟的。
组态软件在很多场合应用于控制,可整个控制的中心往往还是PLC,组态软件(上位机)所起的控制作用很小。
人机界面一般用于简单的动作控制,工艺参数的编制,配方的设定等等,虽然在概念上属于控制范畴,但它并未真正起到核心控制作用,因为真正长期的自动运行控制是由PLC完成。
我们不经常使用工控机作为核心控制部分的原因有两点:第一,工控机不适于在很恶略的环境下运行;第二,工控机经常采用的W INDOWS系统并不能够让人放心,其长期运行效果并不好。
尽管PLC、IPC在自动化控制中扮演不同角色,在许多运行连续时间较短,环境相对比较好的地方,人们还是希望使用IPC进行核心控制。
使用IPC进行核心控制有很多种实现方式,当然其中最为简单的办法就是使用组态软件。
在工厂和企业里面PLC 一直是实现自动化的有效方式,而且目前国内真正懂得PLC的人才太少,希望针对本次实训对我们自动化的人大有裨益。
目录5721小结 (26)参考文献 (27)附录西门子控制原理图.............................................................................. 电气图........................................................................................ 梯形图........................................................................................ 指令表第1章亚龙YL-235A型光机电一体化实训考核装置外观图1-1亚龙YL-235A概述亚龙YL-235A型光机电一体化实训考核装置,由铝合金导轨式实训台、上料机构、上料检测机构、搬运机构、物料传送和分拣机构等组成。
基于亚龙YL335B自动生产线分拣站的控制_-_副本

毕业论文课题名称:基于亚龙YL335B自动化生产线实训装置设计的分拣装置控制系统设计毕业设计(论文)题目:基于亚龙YL335B自动化生产线实训装置设计的分拣装置控制系统设计摘要阐述了可编程控制器(PLC)在自动化生产线分拣单元中的应用。
利用可编程控制器,设计成本低、效率高的物料自动分拣装置。
以PLC为主控制器,结合气动装置、传感技术、触摸屏人机界面等,现场控制物料的自动分拣。
关键词可编程控制器分拣装置传感技术气动技术电磁阀变频器触摸屏人机界面前言系统具有自动化程度高、运行稳定、精度高、易控制的特点,能连续、大批量地分拣货物,分拣误差率低且人工劳动强度大大降低,可明显提高劳动生产率。
而且,分拣系统能灵活地与其他物流设备无缝连接,实现对物料的分配和管理。
其设计采用标准化、模块化的组装,系统布局灵活,程序开发简单,维护、检修方便,可适应进行物料分拣的弹性生产线的需求,受场地等因素的影响不大。
同时,只要对本系统稍加修改即可实现各种不同生产线的要求。
目录第1章概论 (1)1.1课题设计要求 (1)1.2自动分拣系统设计目的 (2)1.3YL-335A自动化生产线实训考核装备介绍 (2)1.3.1 YL-335A的基本组成 (2)1.3.2. YL-335A各工作单元的基本功能 (3)1.3.3. YL-335A 的特点 (3)1.3.4 YL-335A的PLC网络控制方案设计 (4)1.3.5 YL-335A的公共模块和器件设计 (4)第2章分拣单元的硬件设计 (7)2.1分拣单元的结构组成 (7)2.1.1传送和分拣机构 (8)2.1.2 传动机构 (10)2.1.3 电磁阀组 (11)2.2分拣单元的工作原理 (12)2.3气动控制回路 (12)2.4分拣单元的电气接线 (13)2.5PLC的I/O接线 (14)2.6西门子MM420变频器简介 (15)2.6.1 MM420 变频器的BOP 操作面板 (17)2.6.2 MM420 变频器的参数设置 (18)第3章分拣单元的软件设计. (21)3.1分拣单元的编程要点 (21)3.2分拣单元变频器的参数设置及梯形图 (21)3.2.1变频器固定频率调速 (21)3.2.2变频器模拟输入变速调速 (23)3.2.3在PLC网络控制下的分拣单元程序 (24)3.2.4系统控制方案的调试及触摸屏的设计 (27)结束语 (27)参考文献 (29)第1章概论在高新技术不断迅速发展及企业现代化生产规模的不断扩大和深化的今天,不断更新和研发自动化生产线非常重要。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于YL-235A 设备的工件分拣生产线设计本文的设计任务就是设计一条能够自动对于金属与非金属、黑色以及非黑色工件进行识别,并且将这些工件进行分拣堆放的自动生产线。
执行系统与电控系统组成了生产线。
PLC 自从问世以来就在自动控制各个行业发挥着难以取代的核心控制作用。
PLC 运行可靠,适用于各种恶劣的工业环境,PLC 和工控机(IPC )相比,其运行可靠、可扩展性好、便于电气连接、控制更专业,但是工控机良好的人机界面,方便高级语言都是PLC 所不能比拟的。
组态软件在很多场合应用于控制,可整个控制的中心往往还是PLC ,组态软件(上位机)所起的控制作用很小。
人机界面一般用于简单的动作控制,工艺参数的编制,配方的设定等等,虽然在概念上属于控制范畴,但它并未真正起到核心控制作用,因为真正长期的自动运行控制是由PLC 完成。
我们不经常使用工控机作为核心控制部分的原因有两点:第一,工控机不适于在很恶略的环境下运行;第二,工控机经常采用的Windows 系统并不能够让人放心,其长期运行效果并不好。
尽管PLC、IPC 在自动化控制中扮演不同角色,在许多运行连续时间较短,环境相对比较好的地方,人们还是希望使用IPC 进行核心控制。
使用IPC 进行核心控制有很多种实现方式,当然其中最为简单的办法就是使用组态软件。
在工厂和企业里面PLC 一直是实现自动化的有效方式,而且目前国内真正懂得PLC 的人才太少,希望针对本次实训对我们自动化的人大有裨益!1 工件分拣生产线的工作流程及工作原理本次毕业设计项目亚龙YL-235A 工件分拣生产线设计主要包含了电气自动化专业学习中所涉及的诸如电机驱动、机械传动、气动、触摸屏控制、可编程控制器、传感器,变频调速等多项技术,为我们提供了一个典型的综合设计环境,使学生对过去学过的诸多单科的专业和基础知识,在这里能得到全面的认识与巩固、综合的训练和实际运用。
亚龙YL-235A 型光机电一体化实训考核装置既包含了机电一体化专业所涉及的基础知识、专业知识和基本的机电技能要求,也体现了当前先进技术在生产实际中的应用。
同时为我们提供了一个典型的、可进行综合训练的工程环境,为我们构建了一个可充分发挥学生潜能和创造力的实践平台1.1 工作流程图 1 工作流程图1.2 工作原理在触摸屏上按启动按扭后,装置进行复位过程,当装置复位到位后,由PLC 启动送料电机驱动放料盘旋转,物料由送料盘滑到物料检测位置,物料检测光电传感器检测;如果送料电机运行若干秒钟后,物料检测光电传感器仍未检测到物料,则说明送料机构已经无物料或故障,这时要停机并报警;当物料检测光电传感器检测到有物料,将给PLC 发出信号,由PLC 驱动机械手臂伸出手爪下降抓物,然后手爪提升臂缩回,手臂向右旋转到右限位,手臂伸出,手爪下降,将物料放到传送带上,落料口的物料检测传感器检测到物料后启动传送带输送物料,同时机械手按原来位置返回,进行下一个流程;传感器则根据物料的材料特性、颜色等特性进行辨别,分别由PLC 控制相应电磁阀使气缸动作,对物料进行分拣。
1.3 Y L235A 器材简介YL235A的准备器材由:实训控制台一台(电源模块、按钮模块、PLC模块、变频器模块、警示灯),电工常用工具一套,计算机一台,连接导线若干,机械手模拟显示模块一块,传送带和物料槽、变频器、电机构成。
电源模块:三相电源总开关(带漏电和短路保护)、熔断器。
单相电源插座用于模块电源连接和给外部设备提供电源,模块之间电源连接采用安全导线方式连接。
图2 电源模块按钮模块:提供了多种不同功能的按钮和指示灯(DC24V),急停按钮、转换开关、蜂鸣器。
所有接口采用安全插连接。
内置开关电源(24V/6A组,12V/2A —组,)为外部设备工作提供电源。
图3 按钮模块PLC模块:采用西门子S7-200CN系列数字量输出模块EM222 输出,所有接口采用安全插连接。
图4 PLC模块变频器模块:三菱E540-0.75KW 控制传送带电机转动,所有接口采用安全插连接图 5 变频器警示灯:共有绿色和红色两种颜色。
引出线五根,其中并在一起的两根粗线是电源线(红线接“ +24” ,黑红双色线接“ GND ” ),其余三根是信号控制线(棕色线为控制信号公共端,如果将控制信号线中的红色线和棕色线接通,则红灯闪烁,将控制信号线中的绿色线和棕色线接通,则绿灯闪烁)图 6 警示灯2课题控制要求及意外情况处理工件分拣设备能自动完成金属工件、黑色塑料工件与白色塑料工件的传送、与包装任务。
按下图设备控制流程图2.1课题控制要求分拣HL2图5工件分拣概况图2.1.1 初始状态通电后,红色警示灯闪亮,提示工件分拣设备送电。
此时,设备的相关部件应为初始状态。
相关部件的初始状态为:⑴供料盘的拨杆停止转动。
⑵机械手停止在左限止位置,气爪松开,手臂气缸和悬臂气缸活塞杆缩回⑶传送带停止运行,分拣气缸A、B、C的活塞杆全部缩回复位。
⑷急停按钮处于复位位置(常开触点断开、常闭触点闭合)。
2.1.2启动在设备相关部件为初始状态的情况下,才能按下启动按钮SB5使设备进入运行, 红色警示灯灭,绿色警示灯闪亮。
如图所示£3 TL S3OpETYC2QI{SETiT图运行启动2.1.3送料按下启动按钮SB5后,若物料盘上的出口传感器检测无物料,则送料电动机开启,驱动物料盘旋转送料,当出料口传感器检测到物料后停止送料;如果送料电动机运行20秒后,出料口传感器仍没检测到物料,则停止送料,红色警示灯闪亮,报警器报警,直到按下复位按钮才停止报警,并重新开始。
8图31物料传送机构1 —磁性开关D-C732 —传送机构3 —落料口传感器4 —落料口5 —料槽6 —电感式传感器7—光纤传感器8—过滤调压阀9 —节流阀10 —三相异步电机11 —光纤放大器12 —推料气缸落料口传感器:检测是否有物料到传送带上,并给PLC 一个输入信号。
落料孔:物料落料位置定位。
料槽:放置物料。
电感式传感器:检测金属材料,检测距离为3~5mm。
光纤传感器:用于检测不同颜色的物料,可通过调节光纤放大器来区分不同颜色的灵敏度。
三相异步电机:驱动传送带转动,由变频器控制。
推料气缸:将物料推入料槽,由电控气阀控制2.1.4机械手搬送工件图30机械手搬运机构1 -旋转气缸2 -非标螺丝3 -气动手爪 5-提升气缸 6 -磁性开关 D-C73 7 -节流阀 8-伸缩气缸手爪提升气缸: 提升气缸采用双向电控气阀控制 磁性传感器: 用于气缸的位置检测。
检测气缸伸出和缩回是否到位,为此在前点和 后点上各一个, 当检测到气缸准确到位后将给 PLC 发出一个信号;(在 应用过程中棕色接 PLC 主机输入端,蓝色接输入的公共端) 手爪 : 抓取和松开物料由双电控气阀控制,手爪夹紧磁性传感器有信号输出,指示 灯亮,在控制过程中不允许两个线圈同时得电。
旋转气缸: 机械手臂的正反转,由双电控气阀控制。
接近传感器: 机械手臂正转和反转到位后, 接近传感器信号输出。
(在应用过程中 棕 色线接直流 24V 电源“ +”、蓝色线接直流 24V 电源“ -”、黑色线 接 PLC主机的输入端)双杆气缸: 机械手臂伸出、缩回,由电控气阀控制。
气缸上装有两个磁性传感器, 检测气缸伸出或缩回位置。
当出料口传感器检测到物料且机械手和各气缸活塞杆的位置正确时, 按下启动按 钮,机械手开始搬物加工。
机械手悬臂伸出——下降——夹紧物料,夹紧 1 秒后— —上升——缩回——右转——伸出——下降——放物,延时 1 秒后——上升——缩回——左转至左侧极限位置停止,等待传送带上的工件分拣完成后再进行下一次搬图4机械手控制流程图2.1.5工件的分拣4 -手爪磁性开关 Y59BLS9-磁性开关 D-Z73 10 -左右限位传感器 11 -缓冲阀12 -安装支架通过皮带输送机位置U的进料口到达传送带上的工件,按下面的方式分拣:进料口放入工件后,传送带启动。
放入传送带上金属、白色塑料或黑色塑料中每种工件的第一个,由位置川的气缸A推入出料斜槽D ;每种工件第二个由位置W的气缸B推入出料斜槽E ;每种工件第二个以后的则由位置V的气缸C推入出料斜槽F。
每次将工件推入斜槽,气缸活塞杆缩回后,机械手再进行搬运下一个工件。
推料时,传送带要先停止。
当出料斜槽D和E中各有1个金属、白色塑料和黑色塑料工件时,设备停止运行,绿色警示灯灭,红色警示灯闪亮,报警器报警2秒,等待下一轮的工作。
2.1.6 设备的停止需要停止工作,按下停止按钮SB6。
按下停止按钮SB6时,所有正在工作的部件,应完成当前工件分拣成功后,设备才能停止运行,绿色警示灯灭,红色警示灯闪亮。
再次启动时,设备继续运行。
2.2工件分拣设备的意外情况处理机械手在夹持工件时可能会出现意外,请对这种情况作出下述处理与保护:由于位置I的机械手取件平台的工件相互挤压,使机械手气爪夹持不到工件就提升。
发生此种情况时,机械手应立刻回到初始状态并停止,同时蜂鸣器发出鸣叫声。
当出现这种情况,蜂鸣器发出鸣叫后,工作人员应按下急停按钮QS使设备停止运行。
QS按下后,蜂鸣器停止发声。
当故障排除后,作人员将QS复位,设备将在停止时保持的状态上继续运行调试问题与解决:1、PLC I/O 设置错误。
解决:重新设置修改I/O 。
2、PLC 上电不运行。
解决:没有将PLC 开关档位调到RUN 位置,调到RUN 位置运行。
触摸屏点击按钮没有反应。
3 、触摸屏点击按钮没有反应。
解决:设置变量错误,重新修改变量。
4 、触摸屏程序无法下载。
解决:设置通讯接口错误,重新修改后正常可下载。
5、通电后元器件不动作。
解决:气源没有打开,打开后正常。
3.工件分拣生产线硬件设计3.1机械部分硬件设计工业机械手是工业生产发展中的必然产物。
它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术装备。
这种新颖技术装备的 出现和应用,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用, 因 而具有强大的生命力,受到人们的广泛重视和欢迎。
工业生产上应用的机械手,由于使用场合和工作要求的不同,其结构型式亦各不 相同,技术复杂程度也有很大差别。
但它们都有类似人的手臂、手腕和手的部分动作 及功能;一般都能按预定程序,自动地、重复循环地进行工作。
此外,还有些非自动 化的装备,具有与人体上肢类似的部分动作, 结构上与工业机械手是一致的,亦可归 属于工业机械手的范畴。
例如,早期就有一种由人直接用绳索牵引进行操作的随动机 械手和近期发展起来的由人工进行操纵的机械手(如平衡吊),以及一些就近按钮控制或遥控的非全自动的单循环的机械手等。
机械手的总体设计要进行全面综合考虑,尽可能使之做到结构简单、紧凑、容易 操作、安全可靠、安装维修方便、经济性好。