机械臂的自动控制系统 课件
机械手控制系统设计ppt课件
松开按钮
夹紧按钮 上升线圈 下降线圈 输 出 设 备 左行线圈 右行线圈 松紧线圈
1
1 1 1 1 1 1
PLC I/O分配
(二)PLC选型 系统要求18个输入点、5个输出点,每项考虑20%的余量 ,应该可以满足本机在使用过程中增加新功能、进行扩展等要 求,故最终选择三菱FX2N-48MR作为PLC控制系统的基本单 元。
昆山 启航城 项目现场实景
四、发展前景
福建中海创集团有限公司
电气子系统
PLC逻辑控制方法
二、机械手控制原理
电气子系统
运动板卡控制方法
二、机械手控制原理
电气子系统
软件控制系统
点对点控制模式(测试) 数控编程模式 位置、速度、插补及电子尺模式 轨迹制图模式 模拟仿真模式 外围控制模式 网络链接模式
二、机械手控制原理
电气子系统
网络链接
机械手控制系统设计
目
录
1 2 3
机械手控制的简介 机械手控制原理 机械手案例
1 机械手控制的简介
1. 控制过程 2. 机械手的用途 3. 机械手的应用场 所 4. 机械手的依赖技术和衍生产品
一、机械手简介
搬运机构
分拣机构 上料机构 传送机构
上料检测机构
一、机械手简介
1. 机械手控制过程
原位 原位 下降 夹紧 上升
二、机械手控制原理
机械子系统
直线运动体的大致结构:
二、机械手控制原理
机械子系统
同步运动体的大致结构:
二、机械手控制原理
机械子系统
齿轮运动体的大致结构:
二、机械手控制原理
机械子系统
齿轮运动体的传动原理:
二、机械手控制原理
《机器人的控制系统》课件
自主导航
通过路径规划和导航算法,实现无人机的自主飞行和自动巡航。
THANKS
功能
机器人控制系统的主要功能包括感知 、决策、执行和反馈,使机器人能够 自主或半自主地完成复杂任务。
机器人控制系统的组成与分类
组成
机器人控制系统通常由感知系统、决策系统、执行系统和反馈系统等组成。
分类
根据控制方式和结构,机器人控制系统可分为集中式、分布式和混合式控制系 统。
机器人控制系统的历史与发展
历史
机器人控制系统的发展可以追溯到20世纪50年代,随着计算 机技术、传感器技术和算法的发展,机器人控制系统的性能 和功能不断得到提升。
发展
未来机器人控制系统的发展将更加注重智能化、自主化和协 同化,同时随着技术的进步,机器人控制系统将更加广泛地 应用于各个领域。
02
机器人感知系统
感知系统的组成与功能
《机器人的控制系统》ppt课件
$number {01}
目录
• 机器人控制系统概述 • 机器人感知系统 • 机器人运动控制系统 • 机器人智能决策系统 • 机器人控制系统实例分析
01
机器人控制系统概述
机器人控制系统的定义与功能
定义
机器人控制系统是用于指导机器人完 成预设任务的一系列软硬件设备和算 法。
组成
智能决策系统由感知、决策和执行三个部分 组成。感知部分负责收集环境信息,决策部 分根据感知信息进行决策,执行部分则根据 决策结果控制机器人行动。
功能
智能决策系统的主要功能是使机器人能够自 主地适应环境变化,进行有效的任务规划和 行动决策,提高机器人的自主性和智能化水 平。
决策算法与实现
决策算法
感知系统的组成
任务26 机械手控制PPT演示文稿
程序结构:主程序、手动子程序、回 原点子程序、自动程序(执行单步、 单周期和连续三种方式)
4
主程序
5
手动程序
夹紧、在最右边:应将工件运到B点后再返回原点,先 执行下降和松开,释放后再返回。条件为
I2.1·I2.6·Q0.1·I0.3
夹紧、不在最右边:先上行、右行、下降和松开, 释放工件后再返回原点。条件为 I2.1·I2.6·Q0.1·I0.3
回原点程序的执行过程,见下页的顺序功能图。
9
自动回原点顺序功能图
手动 回原点 单步 单周期 连续 起动 停止
工作 出 Q0.0
方式 点 Q0.1
选择 地 Q0.2
开关
址
Q0.3 Q0.4
自动 分 Q0.5
起停 配
按钮
下降 夹紧 上升 右行 左行 原位
控制相 应的电 磁铁线 圈
指示灯
按
钮
3
原点条件:机械手在最左和最上,且为 松开状态,表示为:I0.4·I0.2·Q0.1
2
输 地址 功能
入 I0.1 下限位
I0.4 I0.5
左限位 上升
分 I0.6 左行
配 I0.7 松开
I1.0 下降 I1.0 右行 I1.2 夹紧
注释 地址 功能 注释 输 地址 功能 注释
限位 I2.0 (行程) I2.1 开关 I2.2
I2.3
单 I2.4 步 I2.6 操 I2.7 作
原点条件满足后, 原点标志位置1, 公共程序中的初始 步M0.0置1,为执 行自动程序作好准 备。相当于M0.0 是M1.5的后续步。
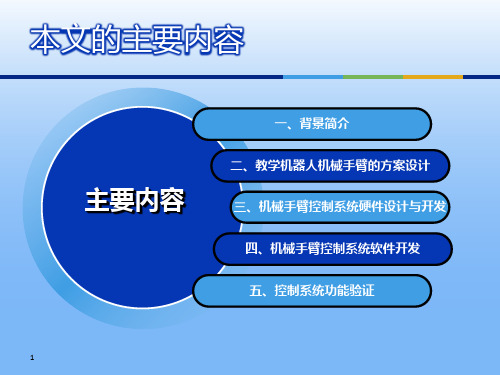
教学机器人机械手臂控制系统设计与开发答辩PPT课件
扩展机器人的功能,让该教学机器人真正实现智能化。 ⑵本文的控制核心采用的虽然是拥有功能强大的C8051单片机,但由 于时间和自己的经验、知识的限制,所编写的程序存在设计不很严密, 对控制过程中更全面的细节没有很好地进行设计,因而机械手的动作 控制上面存在不够精细。
26
谢谢! 请各位老师批评指正!
27
80C51单片机的选择及功能
本作品机械手臂控制系统采用了STC15F2K61S2、C8051F020单 片机。
主控制部分的C8051F020单片机带有8路AD转换通道,处理速 度快,能准确地读取模拟机械手上六个线性电阻输出地模拟量, 并对数据进行处理,再经无线模块将数据传送给接收机,使机械 手做出相应动作。
正确的静止或保持位置
程序烧制及从控制部分单片机安装
⑴将机械手和电子控制模块安装完毕后,将控制程序编译完成烧 入单片机的芯片内,开始控制机械手动作的功能验证实验准备工 作。 ⑵运行《电机测试》程序,将得到的 电机运行.hex 文件烧入到芯 片中,确认所有连线正确后,观察机械手的运动情况。
⑶运行《夹取物体》程序,将得到的 hand.hex 文件烧入到芯片 中运行程序,可以看到机械手的动作是将物体从左边夹取到右 边。用户可根据实际情况调整电机的运动位置达到实际应用的 目的。 ⑷运行从控制中的各自的程序,并将后缀为.hex 文件烧入到从 控制部分的单片机芯片中,为下一步控制系统控制功能调试做 准备。
通讯模块选择:nRF905 nRF905芯片功能简介
14
教学机械手臂控制系统的软件开发
该机械手控制系统中主要的编程包括对控制臂位置信息的 获取,无线发射接收模块的运作控制,舵机动作的控制这 几个方面。
机械工程中的常用自动控制系统 ppt课件
ppt课件
24
3.2 常用控制器
• PCI-1241采用ASIC芯片,通过使用DDA(数字微分分 析器)实现4轴伺服位置和同步控制。
• 闭环控制通过P控制实现,并使用-10到+10的信号输出 到速度型伺服驱动器;还可以通过编码器输入端口回 读电机编码器值,以允许进行步进控制。
• 为每个轴的控制提供一套完整的传感器输入点,包括 原位点、正/负限位点。
ppt课件
15
运动控制器
• 多轴协调运动控制中,需要进行大量、快速的各种运 算,常采用PC+DSP运动控制器的开放式控制模式
• DELTA TAU公司遵循开放式系统体系结构标准开发 的开放式可编程多轴运动控制器
PMAC (Programmable
Multi-Axis Controller,
可编程多轴控制器)
• 使用tuning工具可自动设定和调整PID、陷波和扩展伺 服算法;
• 项目分组管理,可更好的调用运动程序和PLC程序;
• 增强的绘图能力,可以动态和静态的监视参数和寄存 器、运动轨迹等;
• 可实时监视位置、电机状态,参数等;
• 通过资源管理器通过助记的形式改变PMAC参数。
ppt课件
22
3.2 常用控制器
提供了便利条件,得到了广泛的应用。 • 许多厂家都有自己独特的单片机产品。
ppt课件
3
DSP——数字信号处理器
• DSP是一种高速专用微处理器,主要可用于实时快速 地实现各种数字信号处理算法
• DSP内部设置乘法器,且乘法器和运算逻辑部件ALU 并行操作,再加上流水线控制技术,运算速度极快。
• DSP系统选用的算法是各种经过实践检验的通用算法 的组合和改进,专门处理以运算为主、不允许延迟的 实时信号。
机械臂结构设计原理1 (1)PPT课件
电机M4→减速器R4→链轮副C4→俯仰运动n4
肘关节摆动:
电机M3→两级同步带传动B3、B3′→减速器R3→肘关节摆动 n3
肩关节的摆动:
电机M2→同步带传动B2→减速器R2→肩关节摆动n2
可编辑课件
28
关节型机器人传动 系统图:
腕部旋转局部图例:
电机M5→减速器R5→链轮 副 C5→锥齿轮副G5→旋转运动n5
可编辑课件
12
3.关节型:
由动力型旋转关节 和前、下两臂组成。 关节型机器人以臂 部各相邻部件的相 对角位移为运动坐 标。动作灵活,所 占空间小,工作范 围大,能在狭窄空 间内饶过各种障碍 物。
可编辑课件
13
4.极坐标型:
臂部由两个转动 副和一个移动副 组成。产生沿手 臂轴X的直线移 动,绕基座轴Y 的转动和绕关节 轴Z的摆动。其 手臂可作绕Z轴 的俯仰运动,能 抓取地面上的物 体。
腕部俯仰局部图例:
电机M4→减速器R4→链轮副 C4→俯仰运动n4
肩关节局部图例:
电机M2→同步带传 动B2→减速器R2→肩 关节摆动n2
四、机械臂的控制
可编辑课件
33
1、伺服系统的分类:
液压伺服系统:
机械臂各关节的运动通常由液压伺服阀 控制液压缸实现。
电动伺服系统:
机械臂各关节的运动通常由步进电机或 直流电机驱动。
可编辑课件
16
油缸—齿条机构图例:
可编辑课件
17
油缸驱动的手臂伸缩运动结构图例:
特点: 工作行程长,抓重大, 适合于抓举工件形状不 规则、有偏转力矩的场 合。
可编辑课件
18
电机驱动丝杆螺母直线运动结构图例:
可编辑课件
机械臂的机构与控制PPT文档65页

36、“不可能”这个字(法语是一个字 ),只 在愚人 的字典 中找得 到。--拿 破仑。 37、不要生气要争气,不要看破要突 破,不 要嫉妒 要欣赏 ,不要 托延要 积极, 不要心 动要行 动。 38、勤奋,机会,乐观是成功的三要 素。(注 意:传 统观念 认为勤 奋和机 会是成 功的要 素,但 是经过 统计学 和成功 人士的 分析得 出,乐 观是成 功的第 三要素 。
39、没有不老的誓言,没有不变的承 诺,踏 上旅途 ,义无 反顾。 40、对时间的价值没有没有深切认识 的人, 决不会 坚韧勤 勉。
66、节制使快乐增加并使享受加强。 ——德 谟克利 特 67、今天应做的事没有做,明天再早也 是耽误 了。——裴斯 泰洛齐 68、决定一个人的一生,以及整个命运 的,只 是一瞬 之间。 ——歌 德 69、懒人无法享受休息之乐。——拉布 克 70、浪费时间是一桩大罪过。——卢梭
机械手控制设计_梯形图设计(PLC设计课件)

启动:右位且夹紧到位;左位且放松到位 停止:到达上升位置
输入
I0.5
行程开关SQ4
机械手左限
I0.6
行程开关SQ5
机械手右限
I0.7
行程开关SQ6
机械手夹紧位置
I1.0
行程开关SQ7
机械手放松位置
I0.4
行程开关SQ3
机械手上限
I0.7 I0.6 I1.0 I0.5
Q0.1 I0.4 Q0.3 Q0.2
行程开关SQ5
机械手右限
I0.7
行程开关SQ6
机械手夹紧位置
I1.0
行程开关SQ7
机械手放松位置
I0.4
行程开关SQ3
机械手上限
I0.7 I0.6 I1.0 I0.5
Q0.1 I0.4 Q责,敢担当,勇图强。
三、梯形图设计
机械手自动控制 机械臂升降控制-上升
输入
I0.5
行程开关SQ4
机械手左限
I0.6
行程开关SQ5
机械手右限
I0.7
行程开关SQ6
机械手夹紧位置
I1.0
行程开关SQ7
机械手放松位置
I0.4
行程开关SQ3
机械手上限
I0.7 I0.6 I1.0 I0.5
Q0.1 I0.4 Q0.3 Q0.2
6.右转,离开左侧位
尽职责,敢担当,勇图强。
三、梯形图设计
机械手自动控制 机械臂升降控制-上升
机械臂下降,下降到位置,抓取工件(夹紧),上升,传送带1启动,机械手上升到位置,左转,左转到位,下降,放 置工件(放松),上升,右转,下降,继续抓取工件。
启动:右位且夹紧到位;左位且放松到位 停止:到达上升位置
机械臂的自动控制系统
2) The relative order of computing system(计算系统相对阶)
After the two column is 0,
The first two lines of all 0,
And:
• On the output for
, Non singular, The system in the neighborhood of a in x, ,The relative order of the
Group 4: single‐link flexible robot arm
1.The dynamics equation of mechanical arm:
(m2 l2)
(m1 l1)
1) Position equation of manipulator operation end:
State transformation:
The output of the system equations:
2.The mechanical arm odel linearization
1) The value of the parameter
• Assignment for(4) (5) (6):
a1=3.77 a2= 2.12 a3= 0.70 a4=80.32 a5=24.07
Jacobian Matrix:
2) The dynamics equation of mechanical arm:
M(θ) G(θ) M(θ)
:
The total driving moment vector
:
The angle of rotation vector
mcgs机械手控制实例ppt课件

9.3.2 编辑画面
选中“机械手控制”窗口图标,单击“动画 组态”,进入动画组态窗口,开始编辑画面。 (1)利用 图标制作工程标题:机械手控制系 统,属性依然设置为:无填充、无边线、宋体 蓝色26号字。 (2)画地平线:利用画图工具 拖拽出一条一 定长度的直线,调整线的长度、位置、粗细。 颜色为黑色。
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
9.3 制作工程画面
9.3.1 建立画面 [1] 在“用户窗口”中单击“新建窗口”按钮,建立“窗
口0”。 [2] 选中“窗口0”,单击“窗口属性”,进入“用户窗口
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
9.5 动画连接
9.5.2 构件移动动画连接
单击“垂直移动”选项卡,进入该页,在“表 达式”一栏填入:垂直移动量。在垂直移动连 接栏填入各项参数:当垂直移动量=0时,向下 移动距离=0;当垂直移动量=25时,向下移动 距离=72。单击“确认”按钮,存盘。(垂直 移动量的最大值=循环次数*变化率 =25*1=25;循环次数=下移时间(上升时间 )/循环策略执行间隔=5s/200ms=25次。变 化率为每执行一次脚本程序垂直移动量的变化 ,本例中为1。)
经营者提供商品或者服务有欺诈行为 的,应 当按照 消费者 的要求 增加赔 偿其受 到的损 失,增 加赔偿 的金额 为消费 者购买 商品的 价款或 接受服 务的费 用
9.3 制作工程画面
9.3.3 构件的选取
机床机械手控制系统PPT课件

第四周
.
1
PLC顺序控制设计法的应用 项目4 机床机械手控制系统
实验目的:
用数据移位指令来实现机械手动作的模拟。LAD与SFC 语言对比
.
2
PLC顺序控制设计法的应用
项目4 机床机械手控制系统
项目控制要求:
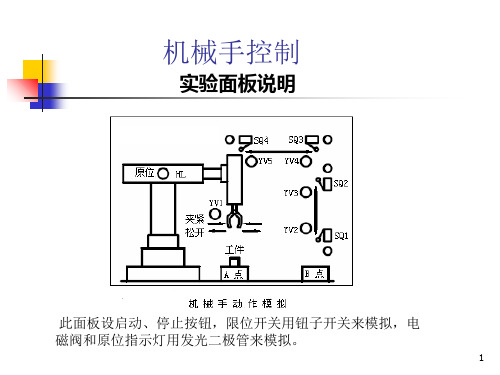
图中为一个将工件由A处传送到B处的机械手,上升/下降和左移/右移的 执行用双线圈二位电磁阀推动气缸完成。当某个电磁阀线圈通电,就一 直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降, 即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通 电为止。另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电 执行夹紧动作,线圈断电时执行放松动作。设备装有上、下限位和左、 右限位开关,它的工作过程如图所示,有八个动作,即为:
编号 S0~S9 S10~S19 S20~S499
断电保持状态继电器 S500~S899 报警用状态继电器 S900~S999
数量 10 10 480
400
100
备注
供初始化使用
供返回原点使用
没有断电保持功能,但是 可以用程序将它们设定为
有断电保持功能
具有停电保持功能,断电 再起动后,可继续执行
用于故障诊断和报警
项目4 机床机械手控制系统
项目预备知识:步进顺控指令的单序列结构的编程方法
M002
S0 驱动处理
X000
S20
Y000
X001
转换条件
S21
Y001
X002
转换目标
LD M8002 SET S0 STL S0 LD X000 SET S20 STL S20 OUT Y000 LD X001 SET S21 STL S21 OUT Y001 LD X002 OUT S0 RET END
机械臂的PLC控制
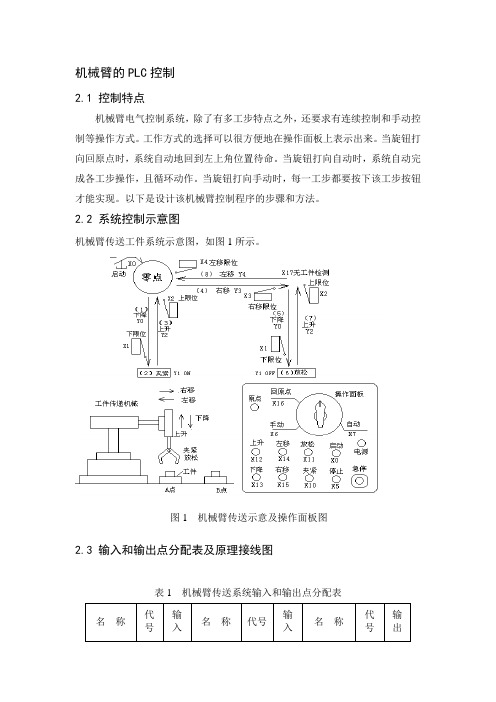
机械臂的PLC控制2.1 控制特点机械臂电气控制系统,除了有多工步特点之外,还要求有连续控制和手动控制等操作方式。
工作方式的选择可以很方便地在操作面板上表示出来。
当旋钮打向回原点时,系统自动地回到左上角位置待命。
当旋钮打向自动时,系统自动完成各工步操作,且循环动作。
当旋钮打向手动时,每一工步都要按下该工步按钮才能实现。
以下是设计该机械臂控制程序的步骤和方法。
2.2 系统控制示意图机械臂传送工件系统示意图,如图1所示。
图1 机械臂传送示意及操作面板图2.3 输入和输出点分配表及原理接线图表1 机械臂传送系统输入和输出点分配表名称代号输入名称代号输入名称代号输出启动SB1 X0 夹紧SB5 X10 电磁阀下降YV1 Y0下限行程SQ1 X1 放松SB6 X11 电磁阀夹紧YV2 Y1上限行程SQ2 X2 单步上升SB7 X12 电磁阀上升YV3 Y2右限行程SQ3 X3 单步下降SB8 X13 电磁阀右行YV4 Y3左限行程SQ4 X4 单步左移SB9 X14 电磁阀左行YV5 Y4停止SB2 X5 单步右移SB10 X15 原点指示EL Y5 手动操作SB3 X6 回原点SB11 X16连续操作SB4 X7 工件检测SQ5 X172.4 操作系统操作系统包括回原点程序,手动单步操作程序和自动连续操作程序,如图3所示。
其原理是:把旋钮置于回原点,X16接通,系统自动回原点,Y5驱动指示灯亮。
再把旋钮置于手动,则X6接通,其常闭触头打开,程序不跳转(CJ为一跳转指令,如果CJ驱动,则跳到指针P所指P0处),执行手动程序。
之后,由于X7常闭触点,当执行CJ指令时,跳转到P1所指的结束位置。
如果旋钮置于自动位置,(既X6常闭闭合、X7常闭打开)则程序执行时跳过手动程序,直接执行自动程序。
2.5 回原位程序回原位程序如图4所示。
用S10~S12作回零操作元件。
应注意,当用S10~S19作回零操作时,在最后状态中在自我复位前应使特殊继电器M8043置1。
(2020年整理)机械臂控制系统的设计.pptx
估计关节力矩之前,首先假设每个关节的重力作用集中在中心,将连杆的重 量均分于各关节,机械臂受力简图如图 2-2 所示,使用静力学方法计算关节所 受力矩的最大值。六自由度机械臂三维静态仿真图如图 2-3 所示:
图 2-3 三维静态仿真图
32.4.2 关节驱动来自统电机的选型机械臂的驱动系统,有三种基本类型,即电动驱动、液压驱动和气动驱动 , 也可以根据需要组合成为复合式的驱动系统。 (1) 电机驱动
图 2-1 关节结构动力传递方案
使用这种联接方式因中间零件少,故形变量与回程间隙都较小,且能保持较 高的结构刚度。
4. 关键部件的选型 1. 关节负载的估算
各关节的动态参数是驱动元件的选择和关节传动零件选择的重要依据。由机 器人动力学相关知识可知完整的机器人动力学方程为:
式中
2
一般使用静力学方法和动力学方法计算机器人的动力参数,速度较低的机械, 在运行过程中,惯性引起的动载荷较小,一般使用静力学方法,忽略 C 和 F 的影 响。而对于运行速度较高机械,其动载荷也较大,即 C 项的影响较大,甚至 超 过静载荷;且粘滞摩擦也较大,同时考虑静载荷和动载荷,需使用动力学计算。 本 文的设计要求是一款可以安装在全向移动平台上的轻型机械臂,对关节的旋转 速 度要求不高,因此估算机械臂力矩时采用静力学方法。
机械臂控制系统的设计
1 引言
近年来,随着制造业在我国的高速发展,工业机器人技术也得到了迅速的发 展。根据负载的大小可以将机械臂分为大型、中型、小型三类。大型机械臂主要 用于搬运、码垛、装配等负载较重的场合;中小型机械臂主要用于焊接、喷漆、 检测等负载较小的场合。随着国外工业机器人技术的不断发展,尤其是一些中小 型机器人,它们具有体积小、质量轻、精度高、控制可靠的特点,甚至研发出更 为轻巧的控制箱,可以在工作区域随时移动,这样大大方便了工作人员的操作。 在工业机器人的应用中最常见的是六自由度的机械臂。它是由 6 个独立的旋转关 节串联形成的一种工业机器人,每个关节都有各自独立的控制系统。
人工智能控制技术课件:机械臂案例控制

ω = F q, ,ሶ ሷ − (,
ሷ
定义Lyapunov函数:
1
= ( + σ=1 ෨ Γ ෨ )
2
其中෨ = ∗ − , ∗ 表示理想模糊调节权值。考虑(7.34),对式(7.38)求导,
将控制器(7.36)代入ሶ ,可得:
针对()、(, )和()三个
ሶ
未知量,采用RBF神经网络对三
项分别进行估计逼近,三个神经
网络的对应输出分别为
(), (, )和
ሶ
(),其
表达式为:
() = () +
ሶ = (, )
ሶ +
൞(, )
() = () +
效果不好或者应用PID控制无法达到想要的效果,此时
需要考虑采用智能控制方法实现。下面介绍神经网络自
适应控制机械臂系统。
机械臂动力学模型
考虑到控制对象为机械臂,假设有n个关节,则根据运动
定律机械臂的动力学方程可以描述为:
()ሷ + (, )
ሶ ሶ + () =
式中,q是关节变量向量;()是n×n阶正定惯性矩阵;
22 2 = 2 22
12 2 = 2 1 2 sin 2
1
1
1
ሶ
, ሶ + ሷ = ሶ +
令y = , = , = 1
2
2
2
ሶ 2
仿真实例
取系统参数1 = 1, 2 = 0.8, 1 = 1, 2 = 1.5 ,控制的目标是使双关节的输出
式中,是相应的逼近误差。
代入得:
()ሷ + (, )
六自由度机械臂控制系统

六自由度机械臂控制系统简介六自由度机械臂是一种具有六个关节的机械臂,可在三维空间内进行各种姿态变化和运动。
六自由度机械臂控制系统是通过控制每个关节的运动来实现机械臂的准确定位和运动轨迹规划。
本文将介绍六自由度机械臂控制系统的基本原理和主要组成部分。
基本原理六自由度机械臂的运动是通过对每个关节施加力矩来实现的。
每个关节都由一个电机驱动,通过控制电机的转动来改变机械臂的姿态和位置。
六自由度机械臂的控制系统需要能够接收外部指令并将其转化为对各个关节电机的控制信号。
控制系统组成部分控制器控制器是六自由度机械臂控制系统的核心组件。
它负责接收外部指令并将其转化为对各个关节电机的控制信号。
常见的控制器有单片机、PLC和工控机等。
控制器还需要具备实时性和高精度的要求,以确保机械臂的准确控制。
编码器编码器是用于测量关节位置和角度的装置。
它能够将关节的运动转化为数字信号,并传输给控制器进行处理。
通过编码器的信息,控制器可以准确地控制每个关节的位置和运动。
驱动系统驱动系统由电机和驱动器组成,负责提供足够的力矩和速度来驱动机械臂的运动。
电机和驱动器的选择要根据机械臂的负载和运动要求进行匹配,以确保系统的稳定性和可靠性。
传感器传感器用于监测机械臂的状态和环境变化。
常见的传感器有力矩传感器、位移传感器和光电传感器等。
它们能够实时监测机械臂的力矩、位置和光线等信息,并将其反馈给控制器进行调整。
通信模块通信模块用于与外部设备进行数据交换和通信。
通过通信模块,机械臂可以与计算机、传感器和其他外部设备进行连接,实现数据的传输和共享。
常见的通信模块包括以太网、串口和CAN等。
控制系统工作流程六自由度机械臂控制系统的工作流程如下:1.外部指令输入:通过控制器的输入接口,将外部指令输入到控制器中。
2.指令解析:控制器对外部指令进行解析和处理,确定机械臂的目标位置和运动轨迹。
3.运动规划:控制器根据目标位置和运动轨迹,通过算法进行运动规划,确定每个关节的运动参数。
机械臂的自动控制系统ppt课件
The output of the system equations:
:
2.The mechanical arm odel linearization 1) The value of the parameter Assignment for(4) (5) (6): a1=3.77 a2= 2.12 a3= 0.70 a4=80.32 a5=24.07
Integrated design of the u Kxv control action u usually depends on the actual response of the system, and that is to say, u can be expressed as the output of a linear function
A CA
2.2 2.5
2.2
1
3.1 2 1 3.1
RankQ B 0
AB
2.5 2.2
1 3.1
2.5 2.2 2
:
k k sI A BK s 2.5 1
1
2
2.2 s 3.1
s k k k 2 s( 5.6) 5.55 3.1 2.2
1
1
2
:
Because the system can be control completely, so all its poles can be arbitrary configuration.
F F 1 F 2
SI
A BFC
s
2.5 2.2
F
1
1 S
F2
3.1
S
2
S
:
F
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
The observer design and analysis
To the automatic control system accurately, it is necessary to get the accurate values of all status system. However, with the increase of system complexity, rely on the state of sensors to measure information will increase the complexity of hardware, may even lead to system instability. And some state information be restricted conditions, through physical measurement. At this point, the state observer provides a new train of thought: if the analytical model of controlled object is known, can through the design of state observer, then based on the system of external variables (input and output variables) of the actual measured values, the estimate of state variables.
. ?2.5 1 ? ?1? x ? ??2.2 3.1??X ? ??0??U
Y
?
?1 ??0
0? 1??
X
Solution:
? 2.5
Rank
Q? C
?A
? ?
CA
? ? ?
?
? ?
2.2
? 2.5
? ?
2.2
1?
3.1? ??21?3.1
? ?
RanQk ??B 0
AB??
?2.5 ??2.2
(7)
The form of state transformation matrix: ]^T
Hypothesis and the assumption that the variables:
4) Mechanical arm model equation of state:
State equation:
single‐link flexible robot arm
wangyuan
Arrangement :
M1: Build this system in Simulinkwith D/A and A/D converte rs M2: Design a state‐feedback controller (any form are OK) M3: Design a observer (full‐order or reduced‐order) M4: Design output‐feedback controller directly (e.g. PID)
s ?s
?
?
(?1?
2i)?
?
*
?s
?
?
(?1
?
2i)?
?
?
2 ? 2s ? 3
k k 1 ? 7.6, 2 ? 9.55
k ? ??7.6 9.5??5
3.Design a observer (full ‐ord
er or reduced ‐order)
The flexible mechanical arm vibration force analysis
system is 2.
3) Coordinate transformation
4) System is converted into standard type: The output
5) State feedback matrix,
,The system
become a completely controllable linear system
1 3.1
2.5? 2.2??? 2
k k sI? A ? BK ? s ? 2.5? 1 2 ? 1 ?2.2 s ? 3.1
s k k k ? 2 ? s( 1 ? 5.6?) 5.55? 3.1 1 ? 2.2 2
Because the system can be control completely, so all its poles can be arbitrary configuration.
The output of the system equations:
2.The mechanical arm odel linearization
1) The value of the parameter
? Assignment for(4) (5) (6):
a1=3.77 a2= 2.12 a3= 0.70 a4=80.32 a5=24.07
2) The relative order of computing system(计算系统相对阶)
After the two column is 0,
The first two lines of all 0,
And:
? On the output for
, Non singular, The system in the neighborhood of a in x, ,The relative order of the
Group 4: single‐link flexible robot arm
1.The dynamics equation of mechanical arm:
(m2 l2)
(m1 l1)
1) Position equation of manipulator operation end:
State transformation:
:
The gravity vector
:
Inertia matrix
The mathematical expression: Simultaneous : (1) (2) (3)
The mathematical expression and The quantitative value:
3) Defined state variables:
2.State feedback control
The constitution of the state feedback
state feedback u=- Kx+ v
..
x
x ? Ax ? BU y ? Cx
State description of close‐loopsystem
.
x =(A-BK)x+Bv
Jacobian Matrix:
2) The dynamics equation of mechanical arm:
M(θ) G(θ) M(θ)
:
The total driving moment vector
:
The angle of rotation vector
:
Coriolis Centrifugal torqueInertia