第4章 比值控制系统
过程控制系统第4章-选择、均匀、分程

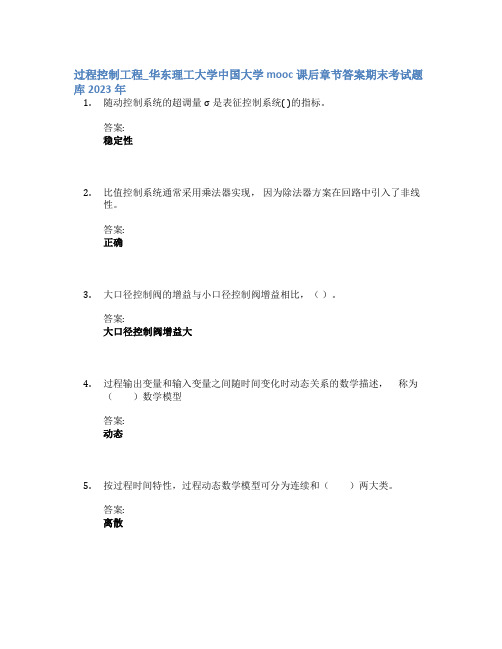
下图表示两个串联的精馏塔独立设置控制系统. 两个独立 下图表示两个串联的精馏塔独立设置控制系统. 两个独立 运行的单回路液位控制系统 乙塔 甲塔 和流量控制系统工作时是相 QC LC 互矛盾的. 为解决矛盾, 可 互矛盾的 为解决矛盾 在两塔之间增设中间缓冲容 器来克服, 器来克服 但这增加了投资 且对于某些生产连续性很强 的过程又不允许中间储存的时间过长, 的过程又不允许中间储存的时间过长 因 此还需从自动化方案的设计上寻求解决的 甲塔 方法. 均匀控制就是一种解决方案. 方法 均匀控制就是一种解决方案 均匀 LC 控制系统把液位﹑ H 控制系统把液位﹑流量统一在一个控制系 统中, 如左图所示. 所谓均匀控制系统是 统中 如左图所示 所谓均匀控制系统是 指两个工艺参数在规定范围内能缓慢地﹑ 指两个工艺参数在规定范围内能缓慢地﹑ 均匀地变化 Q 均匀地变化, 使前后设备在物料供求 上相互兼顾﹑均匀协调的系统. 上相互兼顾﹑均匀协调的系统
Q1 QC1
K
二 氧 化 碳 反 应 器 氧 气
Q1r
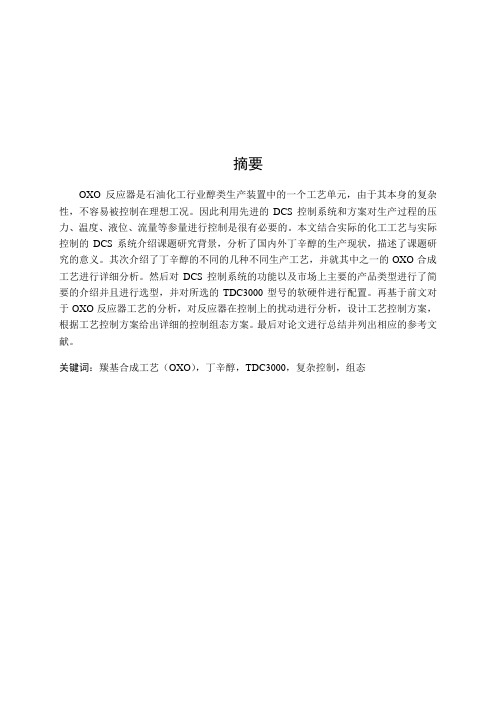
主控器 控制阀 主流量变送器 比值器 主对象
Q1
QC2 Q2
混 合
Q2
副控器 控制阀 副流量变送器 副对象
双闭环比值控制系统的主控回路是一定值系统, 双闭环比值控制系统的主控回路是一定值系统 使主流 量的变化较为平稳, 从而副流量的变化也较平稳, 提高 量的变化较为平稳 从而副流量的变化也较平稳 了流量比值的精确度, 另一优点是, 了流量比值的精确度 另一优点是 提降负荷比较方便 只要缓慢地改变主控器的给定值, 就可提降主流量, 只要缓慢地改变主控器的给定值 就可提降主流量 而 副流量也可自动跟踪提降. 副流量也可自动跟踪提降 双闭环比值控制系统的缺点除结构稍复杂, 双闭环比值控制系统的缺点除结构稍复杂 投资稍 多外, 由于两个闭环通过比值器互相联系, 当主﹑ 多外 由于两个闭环通过比值器互相联系 当主﹑副控 制器参数整定不当时, 会引起“共振” 为防“共振” 制器参数整定不当时 会引起“共振”, 为防“共振”, 应 通过对主控制器的参数整定, 通过对主控制器的参数整定 尽量使主回路的输出为非 周期变化. 副控制器一般选PI控制 控制. 周期变化 主﹑副控制器一般选 控制 (四)变比值控制系统 四 变比值控制系统 上述各种比值控制都是定比值方案. 上述各种比值控制都是定比值方案 但生产上维持 流量比恒定往往不是控制的最终目的, 流量比恒定往往不是控制的最终目的 仅仅是保证产品 质量的一种手段. 质量的一种手段 当系统中存在除流量干扰外的其它干
工业过程控制考试知识点总结
⼯业过程控制考试知识点总结第1章1. 系统动态性能的常⽤单项指标有哪些?这些指标那些分别属于稳定性、准确性和快速性?会计算给定值单位阶跃响应下的性能指标。
P8,9,10解:单项性能指标主要有:衰减⽐n 、超调量与最⼤动态偏差A 、静差C 、调节时间T S 、振荡频率w 、振荡周期T 和峰值时间T P 等。
稳定性:衰减⽐,最⼤动态偏差。
准确性:静差,最⼤动态偏差。
快速性:调节时间,振荡频率。
1y 为第⼀个波峰值,y 3为与1y 相邻的同向波峰值,y (∞)为最终稳态值,X 1为设定值。
n=1y :y 3;1100%()y y σ=?∞;A=最⾼峰-设定值;C=⼁X 1-y (∞)⼁;T 为相邻两个同向波峰之间的时间间隔。
2. 典型过程控制系统由哪⼏部分构成,并画出典型过程控制系统⽅框图?解:测量变送器、控制器、执⾏器和被控对象.第2章1. 热电偶的中间温度定律及中间导体定律?什么是热电偶冷端补偿?常⽤补偿⽅法的应⽤场合?补偿导线的作⽤?解:中间温度定律:E AB (t ,t o )=E AB (t ,t n )+E AB (t n ,t o )中间导体定律:在热电偶回路中接⼊中间导体后,只要中间导体两端的温度相同,则对热电偶的热电动势没有影响。
接⼊多种导体时亦然。
热电偶冷端补偿:实际应⽤时热电偶冷端温度波动较⼤给测量带来误差,为降低影响,通常⽤补偿导线作为热电偶的连接导线。
补偿导线的作⽤:将热电偶的冷端延长到距热源较远且温度⽐较稳定的地⽅。
常⽤补偿⽅法的应⽤场合:(1)查表法。
只能⽤于临时测温。
(2)仪表零点调整法。
适宜冷端温度稳定的场合。
(3)冰浴法。
⼀般⽤于热电偶的检定。
(4)补偿电桥法。
⼴泛⽤于热电偶变送电路中。
(5)半导体PN结补偿法。
2.常⽤热电偶分度号有那些,每种热电偶主要的优缺点是什么?解:3.什么是基本误差?精度的定义?从经济和实⽤的⾓度选择仪表的精度等级?解:基本误差:基本误差⼜称引⽤误差或相对百分误差,是⼀种简化的相对误差。
第6章-串级控制系统讲解全文编辑修改

D1
烧成带 θ1
副测量变送器
主测量变送器 根据副控制器的“反”作用,其输出将减小,“气开”式的控制阀门将 被关小,燃料流量将被调节回稳定状态时的大小。
6.1 串级控制系统的基本概念
串级控制系统的工作过程
(2)只存在一次干扰
θ1r
主控制器
副控制器 调节阀
D2 燃烧室 θ2
隔焰板
D1
烧成带 θ1
副测量变送器
主参数设定
-
主调 节器
-
副调 节器
调节 阀
二次扰动
副对象
一次扰动 主参数
主对象
副变送器
副参数
定值控 制系统
主变送器
主回路
图6-6 串级控制系统标准方框图
1) 在结构上,串级控制系统由两个闭环组成.副回路 起“粗调”作用,主回路起“细调”作用。
2) 每个闭环都有各自的调节对象,调节器和变送器 3) 调节阀由副调节器直接控制
-
-
Gm2(s)
Y2(s)
Gm1(s)
y2,sp
+ -
Gc2 ym2
Gv Gm2
+ +
GGpo22
D2 y2
D2(s)
1 + Gc G 2Gv op22Gm2
y2,sp
Gc2GvGGop2
1 + Gc G 2Gv op22Gm2
+ D2' (s)
+
y2(s)
Go2’(s)
6.2 串级控制系统的分析
6.2 串级控制系统的分析
串级控制特点总结:
1) 在系统结构上, 它是由两个串接工作的控制器构成的双闭环 控制系统。其中主回路是定值控制,副回路是随动控制;
计算机控制系统常用的控制规律
第一节 第二节 第三节 第四节 第五节 第六节 PID控制 串级控制 前馈控制 史密斯(Smith)预估控制 比值控制 模糊控制
PID控制
4.1 PID调节器的控制作用 4.2 PID控制器的离散化 4.3 数字PID调节中的几个实际问题 4.4 数字PID控制算法的改进 4.5 数字PID控制器参数的整定
4.1 PID调节器的控制作用
1. PID调节器的优点: 为什么要用数字模拟PID
技术成熟 易被人们熟悉和掌握 不需要建立数学模型 控制效果好
4.1.1 比例(P)调节器 1. 比例(P)调节规律 比例(P)调节器的微分方程: y(t) = Kpe(t)
பைடு நூலகம்
(8-1)
其中: y——调节器输出 Kp——比例系数 e(t)——调节器输入,为偏差值,e(t)=r(t)-m(t)。其中,r(t)为给定值, m(t)为被测参数测量值。 2. 比例(P)调节的作用 调节器的输出与输入偏差成正比。因此,只要偏差出现,就能及时地产生 与之成比例的调节作用,具有调节及时的特点。
第一节 PID控制
PID控制方式:采用比例、积分、微分的控制方式。 P I D 1. 模拟PID控制算法:用于模拟控制系统 模拟系统过程控制:被测参数(模拟量:温度、压力、流量)由传感器 变换成统一的标准信号后输入调节器。在调节器中与给定值进行比较, 再把比较后的差值经PID运算后送到执行机构,改变进给量,以达到自动 调节的目的。 2. 数字PID控制算法:用于数字控制系统 数字系统过程控制:先把过程参数进行采样,并通过模拟量输入通道将 模拟量变成数字量,这些数字量通过计算机按一定控制算法进行运算处 理,运算结果经D/A转换成模拟量后,由模拟量输出通道输出,并通过 执行机构去控制生产,以达到给定值。
过程控制系统及其应用
习题
.
第三章 过程通道信号处理及调节仪表
第一节 温度变送器 一、概述 二、放大单元工作原理 三、热电偶温度变送器量程单元 四、变送器的信号调试方法 五、DBW型温度变送器的型号表示 六、DCW型温度变送器
第二节 DDZ-Ⅲ型全刻度指示调节器 一、概述 二、基型调节器的工作原理 三、可编程序数字调节器
器驱动调节阀,改变输入对象的操纵量q,使 被控量受到控制。
.
第三节 过程控制的分类
一、各种分类方法
1)按被控量分类:温度控制系统,压力控制系统, 流量控制系统,液位控制系统等。
2)按控制系统回路分类:开环控制系统及闭环控制 系统,单回路控制和多回路控制。
3)按控制器的控制算法分类:比例控制系统,比例 积分控制系统,比例积分微分控制系统及位式控制 系统等。
过程控制系统及其应用
.
目录
第一章 过程控制的基本概念
第一节 过程控制的发展概况 第二节 过程控制系统的组成
一、被控对象 二、 传感器和变送器 三、 控制器 四、 执行器 五、 控制阀
第三节 过程控制的分类 一、各种分类方法 二、设定值分类
第四节 生产对过控制的要求和指标 一、生产对过程控制的要求 二、过程控制系统的品质指标
第三节 变风量空调系统 一、变风量空调系统概述 二、变风量空调系统的自动控制
参考文献
.
第一章 过程控制的基本概念
第一节 过程控制的发展概况 第二节 过程控制系统的组成 第三节 过程控制的分类 第四节 生产对过程控制的要求和指标
.
第一节 过程控制的发展概况
自20世纪50年代以来,由于计算机技术的发 展,带来了自动化发展的惊人成就。自动化的发
过程控制工程2-4章答案(孙洪程著)

第二章思考题及习题2.1 与单回路系统相比,串级控制系统有些什么特点?答:串级控制方案具有单回路控制系统的全部功能,而且还具有许多单回路控制系统所没有的优点。
因此,串级控制系统的控制质量一般都比单回路控制系统好。
(1) 串级控制系统具有更高的工作频率;(2) 串级控制系统具有较强的抗干扰能力;(3) 串级控制系统具有一定的自适应能力2.2 为什么说串级控制系统主控制器的正、反作用只取决于主对象放大倍数的符号,而与其他环节无关?答:主控制器的正、反作用要根据主环所包括的各个环节的情况来确定。
主环内包括有主控制器、副回路、主对象和主变送器。
控制器正、反作用设置正确的副回路可将它视为一放大倍数为“正”的环节来看待。
这样,只要根据主对象与主变送器放大倍数的符号及整个主环开环放大倍数的符号为“负”的要求。
即Sign{G 01(s )}Sign{G 02’(s )}Sign{G m1(s )}Sign{G c1(s )}=-1就可以确定主控制器的正、反作用。
实际上主变送器放大倍数符号一般情况下都是“正”的,再考虑副回路视为一放大倍数为“正”的环节,因此主控制器的正、反作用实际上只取决于主对象放大倍数的符号。
当主对象放大倍数符号为“正”时,主控制器应选“负”作用;反之,当主对象放大倍数符号为“负”时,主控制器应选正作用。
2.3 串级控制系统的一步整定法依据是什么?答:一步整定法的依据是:在串级控制系统中一般来说,主变量是工艺的主要操作指标,直接关系到产品的质量,因此对它要求比较严格。
而副变量的设立主要是为了提高主变量的控制质量,对副变量本身没有很高的要求,允许它在一定范围内变化,因此在整定时不必将过多的精力放在副环上,只要主变量达到规定的质量指标要求即可。
此外对于一个具体的串级控制系统来说,在一定范围内主、副控制器的放大倍数是可以互相匹配的,只要主、副控制器的放大倍数K c1与K c1的乘积等于K s (K s 为主变量呈4:1衰减振荡时的控制器比例放大倍数),系统就能产生4:1衰减过程(下面的分析中可以进一步证明)。
过程控制系统教学大纲精选全文完整版
可编辑修改精选全文完整版教学大纲英文课程名称:Process Control课程编号:0201508总学时:48 (其中理论课学时:44 实验学时:4)总学分:3先修课程:微机原理与接口技术、自动控制理论Ⅰ、检测仪表及检测技术适用专业:自动化开课单位:电子信息与控制工程学院自动化教研室执笔人:张新荣审校人:刘星萍一、课程教学内容第一章绪论第一节过程控制系统的组成及其分类简单控制系统的组成;控制系统按照给定信号分类;按照控制结构分类。
第二节过程控制系统的特点第三节过程控制系统的质量指标第四节过程控制系统的发展概况自动化控制系统的几个发展时期的时间。
第二章被控过程的数学模型第一节概述建立被控过程数学模型的目的;被控过程数学模型的类型。
第二节解析法建立过程的数学模型单容水槽过程、双容水槽过程数学模型机理建模方法;液阻、液容的概念;阶跃响应曲线特点;有时延单容水槽过程、有时延双容水槽过程数学模型;多容过程数学模型。
第三节响应曲线辨识过程的数学模型由对象阶跃响应曲线用作图法及两点法确定对象的传递函数。
第三章变送单元第一节概述变送的基本概念。
各种差压变送器结构、原理、特点。
第三节温度变送器温度变送器组成、工作原理及线性化原理。
第七节微型化、数字化和智能化变送器变送器的发展趋势;各种微型化、数字化和智能化变送器的结构、原理。
第四章调节单元概述调节器基本概念;PID控制规律;各控制规律的特点;参数改变对控制质量的影响。
第一节 DDZ—Ⅲ型调节器DDZ-Ⅲ型调节器输入部分;PI部分;PD部分;硬手动;软手动电路;输出部分工作原理。
第二节改进型调节器抗积分饱和调节器;微分先行PID调节器;比例微分先行PID调节器。
第三节数字式调节器数字式调节器组成、特点、应用。
第五章执行单元第一节概述执行器的作用;执行器的分类。
第二节电动执行机构电动执行机构结构、工作原理。
第三节气动执行机构气动执行机构结构、工作原理、作用形式。
第四节气动薄膜调节阀调节阀的工作原理;调节阀的分类;调节阀的选择。
过程控制工程_华东理工大学中国大学mooc课后章节答案期末考试题库2023年
过程控制工程_华东理工大学中国大学mooc课后章节答案期末考试题库2023年1.随动控制系统的超调量σ是表征控制系统( )的指标。
答案:稳定性2.比值控制系统通常采用乘法器实现,因为除法器方案在回路中引入了非线性。
答案:正确3.大口径控制阀的增益与小口径控制阀增益相比,()。
答案:大口径控制阀增益大4.过程输出变量和输入变量之间随时间变化时动态关系的数学描述,称为()数学模型答案:动态5.按过程时间特性,过程动态数学模型可分为连续和()两大类。
答案:离散6.过程输出变量和输入变量之间不随时间变化时的数学关系,称为过程的()模型。
答案:静态7.根据过程内在机理,应用物料和能量平衡及有关的化学、物理规律建立过程模型的方法是()答案:机理建模方法8.系统辩识方法建立的模型不具有放大功能,即不能类推到不同型号的放大设备或过程中。
答案:正确9.根据过程输入输出数据确定过程模型的结构和参数的建模方法称为( )答案:系统辩识方法10.精馏塔中上升蒸汽量越多,轻组分越容易从塔顶馏出,但消耗能量也越大.答案:正确11.前馈控制器的设计不需要过程对象的数学模型。
答案:错误12.温度变送器的量程由100C变为200C,则变送器的增益()答案:减小13.衰减比是控制系统( )指标.答案:稳定性14.衰减比n=( )表明控制系统的输出呈现等幅振荡,系统处于临界稳定状态.答案:1:115.机理建模适用范围广,操作条件可进行类比,便于从小试进行扩展和放大处理。
答案:正确16.控制阀常见的流量特性有线性、()、快开特性、抛物线特性等。
答案:对数17.Fail-close控制阀的增益是负的。
答案:错误18.Fail-open 类型的控制阀,其增益是正的。
答案:错误19.泵将机械能转化为热能,使液体发热升温,因此,在泵运转后,应及时打开出口阀答案:正确20.改变进口导向叶片的角度,主要是改变进口气流的角度来可以改变离心式压缩机流量答案:正确21.离心式压缩机不一定要设计防喘振控制系统。
最新过程控制作业答案

dH
(1)物料平衡方程为Q,-(Q2•Q3)=F-dt
增量关系式为-■=Q2-■Q3=F钊
dt
代入增量关系式,则有F土•(R2R3”h=.Q,
dt
(2)两边拉氏变换有:
FsH (s)
R2R3
故传函为:
R2R3
土R2R3K
G(S八Qi(s) _FR2R3s[_Ts1
如果进料流量波动较大试设计一个前馈串级复合控制系统已知系统中有关传递函数分别为sshktis1仃02si试画出此复合控制系统的传递函数框图并写出前馈调节器的传递函数2?气开型工艺要求一旦发生事故终止蒸汽供应3?主副控制器均为反作用厲21厲小1jr06031042104osj或者代公式得到11050604气从而得到相对第八章关联分析和解耦控制已知一耦合过程的传递函数矩阵为gilg120503g21g220406试计算该过程的相对增益矩阵说明其变量配对的合理性然后按照前馈补偿解耦方式进行解耦求取前馈补偿解耦装置的数学模型画出前馈解耦系统框图
R2+R3
第一章
概述
1.1过程ห้องสมุดไป่ตู้制系统由哪些基本单元构成?画出其基本框图。
控制器、执行机构、被控过程、检测与传动装置、报警,保护,连锁等部件
1.2按设定值的不同情况,自动控制系统有哪三类? 定值控制系统、随机控制系统、程序控制系统
1.3简述控制系统的过渡过程单项品质指标,它们分别表征过程控制系统的什么性能?
a.衰减比和衰减率:稳定性指标;
b.最大动态偏差和超调量:动态准确性指标;
c.余差:稳态准确性指标;
d.调节时间和振荡频率:反应控制快速性指标。
丁辛醇OXO反应工艺的DCS控制
摘要OXO反应器是石油化工行业醇类生产装置中的一个工艺单元,由于其本身的复杂性,不容易被控制在理想工况。
因此利用先进的DCS控制系统和方案对生产过程的压力、温度、液位、流量等参量进行控制是很有必要的。
本文结合实际的化工工艺与实际控制的DCS系统介绍课题研究背景,分析了国内外丁辛醇的生产现状,描述了课题研究的意义。
其次介绍了丁辛醇的不同的几种不同生产工艺,并就其中之一的OXO合成工艺进行详细分析。
然后对DCS控制系统的功能以及市场上主要的产品类型进行了简要的介绍并且进行选型,并对所选的TDC3000型号的软硬件进行配置。
再基于前文对于OXO反应器工艺的分析,对反应器在控制上的扰动进行分析,设计工艺控制方案,根据工艺控制方案给出详细的控制组态方案。
最后对论文进行总结并列出相应的参考文献。
关键词:羰基合成工艺(OXO),丁辛醇,TDC3000,复杂控制,组态AbstractOXO reactor is one of process unit producing alcohols in petrochemical industry. Due to complexity of the reactor, it is not easy to control it in the idealized condition. Therefore, it is essential to control the PTLF and other parameters in the process through advanced distributed control system. The paper firstly introduces the research background of the topic combined with actual chemical process and DCS system. Secondly, it introduces several kinds of ways of producing butanol and octanol, and analyzes detailedly one of the ways, OXO. Thirdly, it briefly introduces the function of DCS and main DCS products in the market and selects the type of DCS, then configures HW and SW of TDC3000 series. Fourthly, based on analysis of OXO reactor process, it analyzes disturb on the control of the reactor, designs the process control solution and designs detailed configuration according to the process control solution. Lastly, it concludes the whole paper and lists literature cite.Keywords:OXO, Butanol and octanol, TDC3000, Complex control, Configuration目录1 绪论 (1)1.1 研究背景 (1)1.2 国内外生产现状 (1)1.3 研究意义 (2)1.4 本文的主要内容和内容安排 (3)2 丁辛醇及其OXO合成生产工艺 (4)2.1 引言 (4)2.2 丁辛醇性质 (4)2.3 丁辛醇生产工艺方法概述 (5)2.4 OXO工艺流程 (6)2.5 本章小结 (9)3 DCS控制系统以及TDC3000系统 (10)3.1 引言 (10)3.2 DCS控制系统 (10)3.3 TDC3000控制系统 (11)3.4 TDC3000硬件配置 (12)3.5 TDC3000软件配置 (14)3.6 本章小结 (15)4 OXO合成生产工艺控制方案 (16)4.1 引言 (16)4.2 OXO合成生产工艺的扰动分析 (16)4.3 OXO合成生产工艺的控制要求 (17)4.4 OXO合成生产工艺的控制方案确定 (17)4.5 本章小结 (22)5 OXO合成生产工艺DCS控制的实施 (23)5.1 引言 (23)5.2 控制模块 (23)5.3 DCS控制组态 (24)5.4 本章小结 (33)6 总结与展望 (34)6.1 本文工作的总结 (34)6.2 未来工作的展望 (34)参考文献 (35)致谢 (37)1 绪论1.1 研究背景丁辛醇是重要的基本有机化工原料。
过程控制系统智慧树知到答案章节测试2023年青岛理工大学
第一章测试1.前馈控制是过程工业中最常用的控制策略,简单实用且应用广泛。
()A:错B:对答案:A2.工业生产对过程控制的三项基本要求为:安全性.经济性和稳定性。
()A:错B:对答案:B3.调节时间是反映控制系统快速性的一个指标。
()A:对B:错答案:A4.余差是系统的最终稳态偏差,即过渡过程终了时新稳态值与设定值之差。
()A:对B:错答案:A5.过程控制系统由被控对象.测量变送器.控制器和调节器组成。
()A:错B:对答案:A第二章测试1.建立动态数学模型的基本方法有机理分析法和经验建模法。
()A:错B:对答案:B2.为了简化控制系统的分析和设计,常把执行机构.控制器和测量变送环节结合起来考虑,看作是一个广义对象。
()A:对B:错答案:B3.控制阀的气关形式就是()A:无信号,阀开B:信号增大,开度减小C:无信号,阀关D:信号增大,开度增大答案:AB4.DDZ-III型仪表的标准信号范围为0~10mADC。
()A:错B:对答案:A5.测量变送环节的滞后,包括T和τ都会引起测量动态误差。
()A:对B:错答案:A第三章测试1.纯比例控制器有一个缺点就是当设定值改变后总是存在一定的余差。
()A:错B:对答案:B2.微分作用常用来抵消比例作用带来的不稳定趋势。
()A:对B:错答案:B3.对于被控变量是温度的系统,控制器一般选用PID特性。
()A:错B:对答案:B4.调节器参数的工程整定方法有()A:衰减振荡法B:反应曲线法C:临界比例度法D:理论计算整定法答案:ABC5.比例作用是依据偏差大小动作的。
()A:错B:对答案:B第四章测试1.串级控制系统主回路是随动控制系统。
()A:对B:错答案:B2.串级控制系统参数整定步骤应为先副环后主环。
()A:对B:错答案:A3.在串级控制系统中,主控制器设定值的类型分别为外给定。
()A:对B:错答案:B4.串级控制系统主.副对象的时间常数之比,T01/T02=3~10为好,主.副回路恰能发挥其优越性,确保系统高质量的运行。
过程控制复习重点
过程控制复习重点第1章1 什么定值控制系统?什么随动控制系统?2 过控系统性能指标分为哪几类?各种指标如何定义?3 掌握画流程图的基本方法,了解教学中常用图形符号和标注字符的含义;4 掌握画流程图的基本原则和方法。
第2章1 什么是过程对象的动态模型?2 掌握教材介绍的单容和多容水槽的机理建模方法;3 一阶惯性加纯延迟环节参数实验法求取的阶跃法和“两点法”公式的应用;4 什么是自平衡过程,什么是无自平衡能力过程?5 了解一阶惯性加纯延迟、二阶、无自衡过程的典型传递函数,说明其参数大小与动态特性有何关系?第3章1 简单控制系统的构成和传递函数描述;2 过程特性(包括干扰通道特性和控制通道特性)对控制质量的影响,熟悉简单控制系统控制参数选择的一般性原则;3 单回路负反馈系统的闭环传递函数的求取[Y(S)/R(S) Y(S)/F(S)]及余差的求取;4 调节阀理想流量特性分为哪几类?定义是什么?5 什么是调节阀的工作流量特性?6 调节阀流量特性的选择原则是什么?什么是流通能力?什么是可调比?7 控制器控制规律的选择原则,掌握调节器正反作用的选择方法。
第4章1 比例、积分、微分控制规律的定义及特点是什么?对控制品质有何影响?对阶跃输入的响应是怎样的?2 比例带、积分时间、微分时间与控制作用强弱的关系如何?3 什么是积分饱和?有哪些避免的方法?4 常见PID参数整定(稳定边界法/衰减曲线法)的整定方法的基本过程。
第5章1 串级控制系统的特点,副回路设计的原则和应用;2 绘制串级系统的框图和流程图,分析工作过程,选择调节器正反作用和阀开闭方式。
第6章1 比值控制系统的结构流程图和框图,不同结构的控制特点(单闭环/双闭环);2 比值系数的计算方法(有/无开方器),乘法器输入电流与比值系数的关系;3 了解比值控制系统的动态补偿方法;4 均匀控制的特点,控制规律选择的原则;5 分程控制系统的类型、作用、结构流程图和框图,选择调节器正反作用和阀开闭方式,了解直线/对数阀分程点的计算方法;6 选择控制系统的种类、作用,流程图/框图形式,用高选器/低选器的选择的方法。
第4章控制系统的频率特性4.3对数坐标图
90 当有两个微分环节时,斜率
为40dB/dec,相位为180°。
当有n个微分环节时,斜率 为n×20dB/dec,相位为n×90°。
微分环节的Bode图
采用MATLAB绘制微分环节的Bode图:
G1=tf([1,0],[1]); G2=tf([1,0,0],[1]); G3=tf([1,0,0,0],[1]); G4=tf([1,0,0,0,0],[1]); w=logspace(-1,1,100); bode(G1,G2,G3,G4,w); grid;
arctg
2 T 1 T 2 2
,
1 T
180
arctg
2 T 1 T 2
2
,
1 T
对上述两个图的坐标进行对数变换,如下图所示,称为频率 特性的对数坐标图。因为此种图示方法由Bode提出,所以又被称 为Bode图。
A
1
1 T 2 2 2 2T2
arctg
2 T 1 T 2 2
(3)微分环节
传递函数 G( s ) S
L( )(dB)
频率特性 G( j ) j 20
0 0.1 1
对数幅频特性
20
20dB / dec
微分环节
(rad / s)
10
L( ) 20 lg A( )
20 lg
( )(deg)
对数相频特性 ( ) 90
90 0 0.1
微分环节
1
10
(rad / s)
2
2
4.3.1 典型环节的Bode图
① 比例环节 ② 积分环节 ③ 微分环节 ④ 一阶惯性环节 ⑤ 一阶微分环节 ⑥ 二阶振荡环节 ⑦ 二阶微分环节 ⑧ 延迟环节
《过程控制系统》课程教学大纲
过程控制系统课程教学大纲(ProcessContro1System)学时数:40学时其中:实验学时:课外学时:学分数:2.5适用专业:电气工程与自动化一、课程的性质、目的和任务《过程控制系统》课程是电气工程与自动化专业的一门专业主干课程,具有很强的实践性。
通过本课程的学习,要使学生在掌握自动控制理论和过程检测与控制仪表等知识的基础上,用工程处理的方法去解决控制系统的分析、设计与研究方面的问题。
二、课程教学的基本要求(一)单回路控制系统特点、适用场合及分析设计方法:(二)深刻理解、牢固掌握各种复杂控制系统的特点、适用场合及分析设计方法;(≡)通过对典型案例的学习,掌握对各典型单元操作静、动态特性的分析方法,和与之相匹配的典型控制方案的设计,了解其发展动态。
本课程总学时为40学时,2.5学分,设置在第七学期。
其中相关实验安排在综合实验中。
三、课程的教学内容、重点和难点第一章单回路控制系统(10学时)一、基本内容本章是过程控制系统课程的基础。
主要有单回路控制系统的方案设计、调节参数整定以及控制系统的投运等内容。
二、基本要求1、了解过程控制系统工程设计概要;2、了解和掌握单回路控制系统方案设计;3、了解和掌握测量变送器选型;4、了解和掌握执行器(调节阀)选型;5、了解和掌握控制器(调节器)控制规律选取;6、了解和掌握单回路控制系统参数整定和系统投运方法。
第二章复杂过程控制系统(16学时)一、基本内容主要介绍为提高控制品质或满足特殊操作要求的过程控制系统及应用中的有关问题。
包括串级控制、比值控制、均匀控制、前馈控制、分程控制、选择性、阀位控制和推断控制等系统结构及分析。
二、基本要求1、了解和掌握串级控制系统;2、了解和掌握比值控制系统;3、了解和掌握均匀控制系统;4、了解和掌握前馈控制系统;5、了解和掌握分程控制系统;6、了解和掌握选择性控制系统;7、了解和掌握阀位控制方案;8、了解和掌握推断控制系统。
第三章流体传送设备的控制(2学时)一、基本内容流体传送设备(泵及压缩机)及其运行特点,控制方案及特殊控制方案。
过程控制系统课后习题

过程控制系统课后习题(总6页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--第二章1什么是对象特性为什么要研究对象特性答:研究对象特性是设计控制系统的基础;为了能使控制系统能安全投运并进行必要的调试;优化操作。
2什么是对象的数学模型静态数学模型与动态数学模型有什么区别答:对对象特性的数学描述就叫数学模型。
静态:在输入变量和输出变量达到平稳状态下的情况。
动态:输出变量和状态变量在输入变量影响下的变化情况。
3建立对象的数学模型有什么意义答:1,控制系统的方案设计;2控制系统的调试和调节器参数的确定;3制定工业过程操作优化方案;4新型控制方案及控制策略的确定;5计算机仿真与过程培训系统;6设计工业过程的故障检测与诊断系统。
4建立对象的数学模型有哪两种方法答:机理建模和实验建模。
机理建模:由一般到特殊的推理演绎方法,对已知结构、参数的物理系统运用相应的物理定律或定理,根据对象或生产过程的内部机理,经过合理的分析简化而建立起描述系统各物理量动静态性能的数学模型。
实验建模步骤:1确定输入变量与输出变量信号;2测试;3对数据进行回归分析。
5反应对象特性的参数有哪些各有什么物理意义他们对自动控制系统有什么影响答:K—放大系数。
对象从新稳定后的输出变化量与输入变化量之比。
T—时间参数。
时间参数表示对象受到输入作用后,被控变量的变化快慢。
桃—停滞时间。
输入发生变化到输出发生变化之间的时间间隔。
6评价控制系统动态性能的常用单项指标有哪些各自的定义是什么单项性能指标主要有:衰减比、超调量与最大动态偏差、静差、调节时间、振荡频率、上升时间和峰值时间等。
衰减比:等于两个相邻的同向波峰值之比n;过渡过程的最大动态偏差:对于定值控制系统,是指被控参数偏离设定值的最大值A;超调量:第一个波峰值y与最终稳态值y之比的百分数;残余偏差C:过渡过程结束后,被控参数所达到的新稳态Y与设定值之间的偏差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
K 1 Fh Fs 1 / 3 K 2 Fa Fs 1.4 / 3
16
因采用非线性检测变送环节,仪表比值系数的计算公式为:
K' K 2
2 F主 max 2 F从 max
可得
2 K '1 K 1
Fs2max Fh2max
1 320002 3 12500
2 2
0.7282
比值器参数准统一信号。以下分两种情况。
11
一、流量与测量信号成线性关系
对于Ⅲ型仪表输出4~20mA , 根据变送器的输出关系
I 4 16
'
F Fmax
可得
F2 F2 max F2 F1max F1max I2 4 K ( ) K( ) F1 F1max F1 F2 max F2 max I1 4
20
比值控制系统的实施方案有相乘和相除两类。 一般情况下,宜选择相乘控制方案。 采用计算机或DCS控制时,应选择相乘控制方案。 需要获得主从动量流量的实际比值时,建议用除法器作比值 运算,但不包含在控制回路内部。
21
三、比值控制系统中的非线性补偿
比值控制系统中的非线性特性是指被控过程的静态放大系数 随负荷变化而变化的特性,在设计比值控制系统时必须要加 以注意。
第4章比值控制系统
比值控制系统基本概念
比值控制系统的基本类型
比值控制系统设计 比值控制系统参数整定
1
4-1、概述
一、定义
实现两个或两种以上 参数符合一定比例关 系的控制系统,称为 比值控制系统。
2
二、关系
在需要保持比值关系的两种物料中,必有一直处于主导
地位,这种物料称为主物料,表征这种物料的参数称之
14
15
从仪表精确度考虑,流量仪表测量范围分为十挡:1、1.25、 1.6、2、2.5、3.2、4、5、6.3、8×10n(n为整数)。根据 题意,各差压变送器的量程应选择为: Fsmax=32000m3/h;Fhmax=12500m3/h;Famax=16000m3/h; 采用蒸汽作为主动量Fs,天然气Fh和空气Fa为从动量。防止水 碳比过低造成析碳。 依题意工艺比值系数为:
26
又因为在加开方器的情况下,有
F1 max F2 F1 max K K F1 F2 max F2 max
'
动态补偿器的传递函数为:
注意:由于从动流量总要滞后于主动流量,所以动态补偿器一 般应具有超前特性。
27
五、流量的温度压力校正
当采用孔板等节流装置测量气体流量时,如果设计计
算时的工况温度和压力与实际运行时的工况温度和压力有 偏差,就会对气体流量测量造成误差。因此,当被测气体 的工况温度较高,变化较大或工况压力较高,变化较大时 应对该气体流量进行温度压力校正。其中,温度应换算到 凯氏温度,压力应换算到绝对压力。下面给出校正公式:
I1、I2分别为主、副流量测量信号值。 对于采用线性流量检测单元情况时,只有在F1max=F2max的 场合,K’= K。在同样的比值K下,通过调整F1max,F2max亦
可以改变比值。
12
二、流量与测量信号呈非线性关系(采用差压变送器测量流量) 流量与压差的非线性关系为: k----节流装置的比例系数
31
由公式可知,只要在实际工作条件下,测出节流装置上 游的温度和压力,并测得当时的差压Δp1 ,然后按上述公
式换算出设计条件下的Δpn,再求得此时的流量值,即
为校正后的真正流量值。
30
4-5 比值控制系统工程参数整定
按照随动控制系统的整定要求,整定的方法步骤为:
a.进行比值系数计算; b.将积分时间置于最大,调整比例度由大到小,找到系统 处于振荡与不振荡的临界过程为止; c.适当放宽比例度,一般放大20%左右,然后把积分时间 慢慢减小,找到系统处于振荡与不振荡的临界过程或微 振荡过程为止; d.将主物料控制器投入运行,并进行整定。
烷、蒸汽和空气三者的比值为1:3:1.4。流量测量都采用节 流装置和差压变送器,未装开方器,其中,蒸汽最大流量 为31100m3/h;天然气最大流量为11000m3/h;空气最大流 量为14000m3/h;采用相乘和相除方案,确定各差压变送
器的量程,仪表比值系数K1’和K2’,乘法器和除法器输
入电流I k1和I k2。
28
气体体积流量和节流装置差压的关系为: Q k 令:在设计条件的表达式为:
p n n
p
Qn k
而实际工作条件下的表达式为:
p1 Q1 k 1
对于质量气体,只考虑温度、压力的影响,则有:
Tn p1 Q n Q1 T1 p n
29
经推导压力、温度校正公式为:
Tn p1 p n p1 T1 p n
F k p
F2
2 Fmax
对于4~20mA电动仪表
比值系数计算方法为:
I
16 4
2 2 2 F F I 4 F K' 2 22 12max K 2 12max I 1 4 F1 F2 max F2 max
13
比值系数计算示例
合成氨一段转化反应中,为保证甲烷的转化率,需保持甲
25
由图可知,干扰F(s)对主动 流量F1(s)的传递函数为:
Gf (s) F1 ( s ) F ( s ) 1 Gc ( s )G01 ( s )G m 1 ( s )
主动流量F1(s)对从动流量F2(s)的传递函数为:
' F2 ( s ) Gm 1 ( s )G z ( s )K Gc 2 ( s )G02 ( s ) F1 ( s ) 1 Gc 2 ( s )G02 ( s )Gm 2 ( s )
为主动量。在生产过程控制中,主要是流量比值控制系 统,所以主动量也称为主流量,用F1表示。另一种配料 称为副流量用F2表示。比值控制系统就是实现副流量F2 与主流量F1的比值关系,即 K=F2/F1
3
4-2 比值控制系统的类型
1、开环比值控制系统
特点: 简单、成本低; 只有当F1变化时才起控制作用; F2变化时F1不会响应,比例关系被破坏。
在有些生产过程中,要求两种物料的流量比随第三个工艺参数的 要求而变化,也就是比值系数不是固定的而是随工况而变化的, 这就是变比值控制。变比值控制系统是一个以第三个变量为主变 量(质量指标)、以两个流量比为副变量的串级控制系统。
9
10
4-3 比值系数的计算
如上所述,比值控制是解决不同物料流量之 间的比例关系问题。当使用单元组合仪表时, 因输入-输出参数均为统一标准信号,所以,
23
2、非线性补偿 为了克服这一不利影响,通常用开方器进行补偿,即在差压 变送器后串接一个开方器,使流量与测量信号之间呈现线性 关系。 差压变送器的输出电流信号与开方器的输出电流信号之间的
关系为:
' I2 4 I2 4
测量变送环节和开方器串接后总的静态放大系数为:
' I ' K2 2 q2
q 2q 20
4 q2max
常量,它已不再受负荷变化的影响
24
四、比值控制系统中的动态补偿
在某些特殊的生产工艺中,对比值控制的要求非常高,
即不仅在静态工况下要求两种物料流量的比值一定,而且在 动态情况下也要求两种物料流量的比值一定。
为实现动态比值一定,必须满足
F2 K (K为 常 数 ) F1
2 K '2 K 2
Fs2max Fa2max
1.4 2 320002 3
2
16000
2
0.8711
17
假设采用电动III型仪表,则乘法器输入电流(即恒流给定器输 出)和相除方案中比值控制器设定电流应为:
I k 1 16 K '1 4 15.65mA I k 2 16 K '2 4 17.94mA
1、测量变送环节的非线性特性
流量与测量信号无论是呈线性关系还是呈非线性关系,
其比值系数与负荷的大小无关,均保持其为常数。但是, 当流量与测量信号呈非线性关系时对过程的动态特性却 是有影响的。
22
其输入-输出关系有:
2 p 2 kq2
采用DDZ-Ⅲ型仪表将差压
信号线性地转换为电流信号:
p 2 max
通过对流量与测量信号的不同关系可以得出以下结论: 1)流量比值K与比值系数K’是两个不同的概念,不能混淆; 2)比值系数K’的大小与流量比K的值有关,也与变送器的量 程有关。
18
4-4 比值控制系统设计和工程应用中的问题
一、主动量和从动量的选择
主动量通常选择可测量但不可控制的过程变量;
从安全考虑,如该过程变量供应不足会不安全时, 应选择该过程变量为主动量,例如,水蒸汽和甲烷 进行甲烷转化反应,由于水蒸气不足会造成析碳, 因此,应选择水蒸汽作为主动量; 从动量通常应是既可测量又可控制,并需要保持一 定比值的过程变量。
2 kq2 max
p 2 I2 ( 20 4 ) 4 p2 max
32 q
2 2 max
测量变送环节是非线性的,其静态放大系数为:
K2
I 2 q 2
q 2 q 20
q 20
问题:当负荷增大时,调节器的整定参数如果不能随之改 变,则系统的运行质量就会下降 。
19
二、 比值控制系统类型的选择
主动量不可控时,选用单闭环比值控制系统,例如,主动量 来自上一工序; 主动量可控可测,并且变化较大时,宜选双闭环比值控制系 统; 当比值根据生产过程的需要由另一个控制器进行调节时,应 选择变比值控制系统; 当质量偏离控制指标需要改变流量的比值时,应采用变比值 控制系统; 变比值控制系统的第三过程变量通常选择过程的质量指标, 例如,烟道气中的氧含量等。