一种新型光电轴角编码器译码方法研究
光电编码器精度分析

光电编码器精度分析作者:徐桂成来源:《电脑知识与技术》2018年第08期摘要:光电轴角编码器也叫做光电角位置传感器,它集光、机、电为一体,它是以高精度圆光栅为检测元件,通过码盘把机械圆周角度转换为电信号,通过差分放大、整形滤波、校正、细分、译码等处理后和计算机相连可实现输出精密角度值以及做伺服控制,它具有分辨率高、测量范围广、使用可靠、易于维护等优点被广泛应用于雷达、光电经纬仪、数控机床、指挥仪和高精度闭环调速系统等诸多领域。
随着科技的发展,军工、国防等领域对微型传感器的需求越来越急迫,要求编码器向高精度、高分辨率、小型化和智能化发展。
同时随着科技的发展,尤其是空间科学自动化和国防建设等领域对编码器的分辨率和精度提出了更高的要求。
因此,研制高精度、高分辨率的编码器是科学技术发展的关键一步。
关键词:光电编码器;经度;偏心中图分类号:TP3 文献标识码:A 文章编号:1009-3044(2018)08-0049-031码盘装调偏心量对精度的影响光电轴角编码器主轴的幌动和光栅码盘轴心与主轴系间的偏心都将引起测量误差,因此,采取措施尽量使码盘轴心与主轴轴心一致,是完成高精度编码器调试的必要条件。
调整轴向跳动和偏心量是码盘装调主要步骤,启动摩擦力矩和高速旋转主轴转动惯量等也是码盘装调的主要程序。
接下来只对码盘偏心量加以研究,并提出一种用光电信号调整码盘偏心量的方法,用光电信号调整码盘偏心的成功应用为高精度编码器码盘的调试成型奠定了基础。
码盘偏心量是指码盘轴心与支承主轴旋转中心的差值。
该差值量直接影响精粗码道之间的相位关系,同时该偏心量对读数也有显著影响,如图1所示:(3)式与(2)式结果相同,因此采用对经读数方式,不管码盘偏心量如何,不影响读数。
因此,偏心不限制对径读数。
但是光栅码盘轴心与主轴系间的偏心对粗码计圈数间的关系影响无法消除,不能补偿圈间关系,因为狭缝本身的圈间关系是一个定值,不随码盘的圈间相位变化容易导致错码。
光电编码器计数电路设计及数字滤波
光电编码器计数电路设计及数字滤波
光电编码器计数电路设计及数字滤波
光电编码器是一种高精度的角位置测量传感器,在数控车床中常用于检测主轴系统的转速和角位移,也经常在伺服系统中用于检测伺服电机的转速。
但是,光电编码器在其安装基座的机械振动激励下,会不可避免地导致其主码盘的振动,从而引起输出波形的畸变,最终引起计数错误,使伺服驱动系统不能正常运行,影响数控机床的加工精度和定位精度。
为此,可以采用数字滤波的方法来减少计数误差,但存在以下缺点:
1、数字滤波要占用CPU时间,而且随着所用光电编码器数量的增加而增加,故不能适应较大系统的要求。
2、数控车床进行螺纹插补时,需要准确读取光电编码器的计数值,以获取主轴位置信息,但此时CPU没有时间进行数字滤波。
基于以上原因,对光电编码器常用的判向和计数电路进行了改进,较好地解决了由于振动引起的计数误差。
二、常规光电编码器的判向和计数电路
通常,光电编码器的输出信号由A和B相位差90°的两路方波组成,可用D触发器作为判向器,由门电路和可逆计数器完成计数功能。
当光电编码器顺时针方向旋转时,A相信号在相位上超前B相信号1/4周期。
经过D触发器后,Q1为高电平,Q2为低电平,于是,C1有计数脉冲,可接入双向计数器的“+”端,而C2保持为低电平。
反之,当逆时针方向旋转时,C1将保持低电平,C2形成的计数脉冲可作为双向计数器“-”端的输入信号,从而完成对光电编码器输出信
号的计数。
光电编码器的高可靠性数字译码方案研究

码 : 【忡 ; 卜 忡 迎 } 抗 扰 j
戈献 f , j : : A 文章 编 :0 3 2 1 0 91 0 4 0 l0 74 ( 0 ): 07 4 2
A ul gt l ou ino e De o e rut i g l bl F lDii lt f h c d r c iW t Hih Rei iy aS o t Ci h a i t
吕恒 毅 , 刘 杨 , 兴林 陈
( 哈尔滨工业大学 控制科学与工程 系 , 黑龙江 哈尔滨 1 0 0 ) 50 1
摘 要 : 他统 的i 电路 m 光 电 蕊 输 出 兕 哑流 信 的 变 化对 译 码结 果 及 电路 使用 奇 命 有 严重 的 影 响 。 书 , [ 一tJ 种改 进 的 敬 码 t - & n "疋 -l F
通 信 与信 息 处 理
Co mu c i n a n o ma i oc s ; m niat nd I f r t o on Pr e s
《 动 化 技 术 与 应 用 》2 0 自 0 9年第 2 8卷 第 l 2期
光 电 编 码 器 的高 可 靠 性 字 译 码 方 案 研 究 数
Ab t a t Th sp p  ̄ n r d c sali r v d d g t l e o e ic i f r h h t e e ti a n o e . ti p o e h t h o s r c : i a e’ t u e l mp o e i i c d rc r u t o e p o o l c rc l c d r I s r v d t a e c mp e i i o ad t e t lxt y o ’ e u gi g a d i sa l t n i d a tc l e u e n 【e l n e iy o e e c d rC l b x a d d. td b g n n n t l i s r si a l r d c d a d h o g v t ft n o e a l e e p n e a o y h Ke r s d c d rc r u t d g t l e o e a p i a i t ; n i n e f r n e y wo d : e o e ic i; i i c d : p l b l y a t i t re e c a d c i —
高精度光电编码器的设计与应用研究

高精度光电编码器的设计与应用研究光电编码器作为一种测量位置和角度的重要设备,在现代工业中得到了广泛的应用。
其主要原理是通过光电效应将物理量转化为电信号,再通过信号处理得到准确的位置或角度信息。
本文将探索高精度光电编码器的设计与应用,并研究该技术在工业领域的发展潜力。
第一节: 光电编码器的原理与分类光电编码器的原理基于光电效应,即光线照射到光电传感器上,产生电子与空穴对后,通过电路的处理,转化为电信号。
根据测量方式和应用需求的不同,光电编码器可以分为增量型和绝对型两种。
增量型光电编码器通过光电转换和信号处理,测量出物体运动的相对位移。
它适用于需要实时监测运动状态的场景,但无法恢复出绝对位置信息。
绝对型光电编码器能够准确确定物体的绝对位置或角度,无需初始化过程,并具有良好的抗干扰性。
它适用于需要准确定位和高精度控制的工业领域。
第二节: 高精度光电编码器的设计要点高精度光电编码器的设计要点关键在于提高信号的稳定性和精度。
以下是一些设计要点的概述:1. 光源和光电传感器的选择合适的光源和光电传感器选择对信号的稳定性至关重要。
光源应具有稳定的光强度和狭窄的光束角度,而光电传感器应具有高灵敏度和低噪声,以确保高质量的信号输出。
2. 信号的处理和解码算法设计高精度的光电编码器需要优化信号处理和解码算法。
有效的滤波和噪声抑制算法可以减小外界干扰对测量结果的影响,并提高信号的准确性和稳定性。
3. 机械结构的优化光电编码器的机械结构对其测量性能有重要影响。
减小机械误差和抗震动设计可以提高编码器的精度和稳定性。
此外,合适的安装方式和机械连接方式也对测量结果的准确性有重要影响。
第三节: 高精度光电编码器在工业领域的应用高精度光电编码器在工业领域有着广泛的应用。
以下是几个典型的应用案例:1. 机器人控制在工业机器人控制中,光电编码器用于测量机器人关节的角度和位置,实现对机器人运动的精确控制。
高精度的光电编码器可以提高机器人的定位精度和工作效率。
毕业设计(论文)-基于PLC控制的多段调速系统实现
摘要随着工业控制要求的发展,对电机速度的控制越来越高。
传统的模拟信号控制方式存在抗干扰能力差、对设备要求复杂、控制精度不高等问题,难以适应日益复杂的工业环境。
本文主要介绍了多段调速系统的结构,并完成了以PLC为控制器,以增量式光电编码器为速度采集的闭环PID控制系统,通过RS-485对变频器的控制实现了三相异步电机的多段调速。
关键字:PLC;RS-485;多段调速;光电编码器AbstractWith the requirements of the development of industrial control, the speed of motor control is more and more strict. The traditional analog signal control mode has poor capacity of resisting disturbance, the requirement of complex equipment, the control precision low and some other problems, it is difficult to adapt to the increasingly complex industrial environment. In this article, mainly introduces the structure of various speed system, and completed the closed loop PID control system through the PLC as controller and incremental photoelectric encoder for speed acquisition, achieve the multistage speed control three-phase asynchronous motor through Frequency converter based on RS-485.Key words: PLC; RS-485; multistage speed; encoder目录第一章概述 (4)1.1 课题研究的背景及意义 (4)1.2 课题研究现状 (5)1.3 本课题研究的主要内容 (6)第二章系统分析 (7)2.1 PLC基本知识 (7)2.1.1 PLC的基本功能 (8)2.1.2 PLC的特点 (9)2.1.3 PLC的展望 (11)2.2 变频器基本知识 (12)2.2.1 变频器的应用 (12)2.2.2 变频器的分类 (13)2.2.3 变频器控制的展望 (14)2.3 光电编码器 (15)2.3.1 增量式编码器 (15)2.3.2 绝对式编码器 (16)第三章系统设计 (19)3.1 总体方案 (19)3.2 硬件设计 (19)3.2.1 变频器的连接 (20)3.2.2 光电编码器的配置 (20)3.2.3 PLC输入输出口分配 (21)3.3 软件设计 (21)3.3.1 变频器的参数设置 (22)3.3.2 PLC的设计 (23)第四章结论 (28)结束语 (29)致谢 (30)参考文献 (31)第一章概述1.1 课题研究的背景及意义随着计算机技术、电子技术的不断进步,PLC(可编程逻辑控制器)技术、变频(变频器)调速技术的发展极为迅速,已渗透到各个领域,以它们为主导的现代生产技术正以史无前例的速度迅猛发展。
光电式编码器
通常数控机床的机械原点与各铀的脉冲编码器发出Z相脉冲的位置
是一致的。
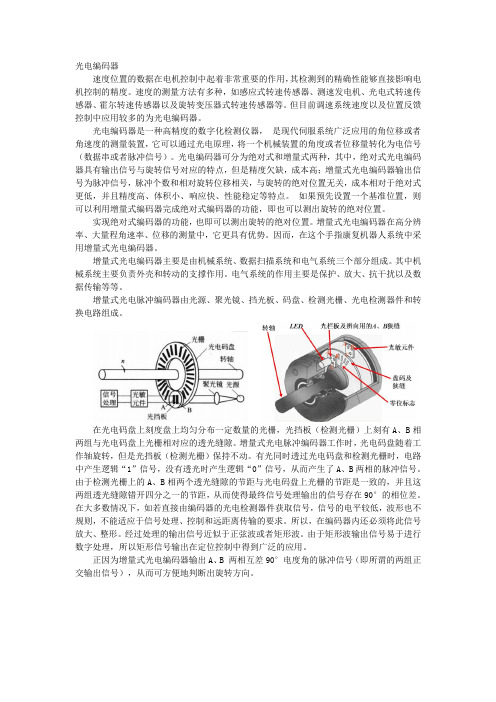
光源
码盘
光电元件
Z 零位脉冲 A 增量脉冲 B辨向脉冲
图6.30 增量式编码器的结构图
(2)绝对式编码器
1)码制和码盘 码盘按其所用码制可分为:二进制、循环码(葛莱码)、十进
绝对式编码器图案不均匀,几位编码器其码盘上就有几位码 道,在编码器的相应位置都可输出对应的数字码,在码盘运动过 程中读取这些代码,即能实时测得坐标的变化。这种方法的优点 是坐标固定与测量以前状态无关,不需起动时的位置重合,抗干 扰能力强,无累积误差,具有断电位置保持,在不读数的范围内 移动速度可超越极限响应速度,不需要方向判别和可逆计数,信 号并行传送等。缺点是结构复杂、价格高,为提高分辨率需要提 高码道数目或者使用减速齿轮机构组成双码盘机构,将任意位置 取作零位时需进行一定的运算。
2.光电式编码器的接口与安装使用注意事项
(1)机械方面
编码器轴与用户端输出轴之间通过联轴节连接如下图所示, 避免因用户轴的串动、跳动,造成编码器轴系和码盘的损坏。应 保证编码器轴与用户轴的不同轴度<0.2mm,与轴线的偏角<1.5o 安装时严禁敲击和摔打碰撞,以免损坏轴系和码盘。 (2)电气方面
编码器的输出线不能与动力线等绕在一起或同一管道传输, 也不宜在配电盘附近使用,配线时采用屏蔽电缆,可以参照下图 进行配线。
增量式编码器图案和光脉冲信号均匀,可将任意位置作为基 准点,从该点开始按一定的量化单位检测位移或转角,计量脉冲 数即可折算为位移或转角。该方法因无确定的对应测量点,一旦 停电则失掉当前位置,且速度不可超越计数器极限响应速度,此 外由于噪声影响可能造成计数积累误差。优点是其的零点可任意 预置,且测量速度仅受计数器容量限制。
编码器工作原理,光电编码器的工作原理分析

编码器工作原理,光电编码器的工作原理分析关键字:编码器工作原理,光电编码器的工作原理分析编码器工作原理绝对脉冲编码器:APC增量脉冲编码器:SPC两者一般都应用于速度控制或位置控制系统的检测元件.旋转编码器是用来测量转速的装置。
它分为单路输出和双路输出两种。
技术参数主要有每转脉冲数(几十个到几千个都有),和供电电压等。
单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组相位差90度的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。
增量型编码器与绝对型编码器的区分编码器如以信号原理来分,有增量型编码器,绝对型编码器。
增量型编码器(旋转型)工作原理:由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。
信号输出:信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。
信号连接—编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。
高精度光电编码器芯片研发及其产业化应用

高精度光电编码器芯片研发及其产业化应用高精度光电编码器芯片研发及其产业化应用1. 引言高精度光电编码器芯片是一种重要的电子器件,广泛应用于各个领域,如机械制造、自动化控制、数码产品等。
本文将深入探讨高精度光电编码器芯片的研发技术及其在产业化应用中的重要性。
2. 高精度光电编码器芯片的原理及研发技术高精度光电编码器芯片通过光电传感器感应目标物体的位置和运动速度,并将其转化为数字或模拟信号输出。
其原理主要包括光电传感器、信号处理电路和输出接口等组成部分。
2.1 光电传感器光电传感器是高精度光电编码器芯片的核心部件,其采用光学组件和光敏器件来接收和转换光信号。
常见的光电传感器包括位移传感器、速度传感器和陀螺仪等。
2.2 信号处理电路信号处理电路主要用于将光电传感器输出的模拟信号转换为数字信号,并进行信号调理和滤波处理,以提高编码器芯片的精度和可靠性。
2.3 输出接口高精度光电编码器芯片的输出接口可以是数字接口、模拟接口或通信接口等形式,用于将编码器芯片的输出信号传输给其他电子设备或系统。
3. 高精度光电编码器芯片的应用领域高精度光电编码器芯片在众多领域都有着重要的应用价值。
3.1 机械制造在机械制造领域,高精度光电编码器芯片被广泛应用于数控机床、工业机器人和精密仪器等设备中。
它能够实时检测和反馈目标物体的位置和运动状态,帮助机械设备实现精准和稳定的运动控制。
3.2 自动化控制在自动化控制领域,高精度光电编码器芯片可以应用于各种控制系统中,如电机驱动控制、位置控制和速度反馈控制等。
它能够提供精准的位置和速度信息,帮助控制系统实现高效、稳定的自动化控制。
3.3 数码产品在数码产品领域,高精度光电编码器芯片被广泛应用于相机、手机和游戏手柄等设备中。
它能够实时检测和反馈设备的位置和运动状态,提供更准确的交互体验和控制精度。
4. 高精度光电编码器芯片的产业化应用挑战与展望目前,高精度光电编码器芯片的研发和应用面临着一些挑战。
光电编码器接口实验

实验七用光电编码器测量电机转角一、实验目的1、了解实验系统的组成和光电编码器检测转角的工作原理;2、熟悉光电编码器与DSP间的接口电路;3、熟悉事件管理器模块的编程和应用;4、掌握直流无刷电机的位置与速度检测方法。
二、实验系统原理及编程2.1 直流无刷电机实验系统中选用的三相直流无刷电机型号为57BL-0730N1,具体参数和信号描述见《实验指导书》的1.2.4节。
2.2光电式位置传感器在光电式位置传感器实验中,BLDC电机采用增量式光电编码器作为位置传感器,输出为两路频率可变、有固定1/4周期相位差(即90度)的脉冲序列,电机每转360°各路输出600个周期的方波信号,即码盘线数为600线/转。
实验过程可以通过示波器观测信号波形。
2.3 与DSP的电路接口TMS320F28×系列DSP包含两个事件管理器,实验中采用事件管理器B(EVB)来实现三相无刷直流电机的转角的测量。
从光电编码器输入的2路QEP信号经过74LVT245缓冲后送至EVB的QEP引脚。
2.4 直流无刷电机的角位置的测量方法1)事件管理器B的初始化事件管理器的初始化可参考如下的例程,其中定时器T4为QEP电路提供事件基准,void InitEvB(void){EALLOW;GPBMUX[0]=0xffff; // always not as i/o portGPBDIR[0]=0x0000; // always as inportEDIS;T4CON[0] = 0x187c; // 使能T4计数器工作,定向增减,QEP作时钟源、CAPCONB[0]= 0x70fc; //1110,0000,0000,0000 选定时器4,使能QEP4,5T4PR[0] = 0xffff; //设置计数器的激素范围为最大值T4CNT[0] = 0x8000; //设置计数器的初值在计数量程的中间}2)电机转角的检测当电机运转时轴上的光电编码器产生正交脉冲序列,QEP电路可以通过两路脉冲的先后次序(相位)确定电机的转动方向,根据检测脉冲的个数和频率,可分别确定电机的角位置和角速度。
基于十六矩阵的新型绝对式多圈光电编码器
VO .4 No 2 1 3 .
J n 2 1 u. 0 1
基于十六矩 阵的新型绝对式 多圈光 电编码器
时伟 ,丁 洪昌,曹国华
( 长春理工大学 机电工程学 院,长春 10 2 3 0 2)
摘
要 :为了实现绝对式光电编码 器的 高精度、超 小型 、大量程测量,本文详细介绍 了一种基于十六矩阵的编码、
第3 卷第2 4 期 2 1 年6 0 1 月
长春理工大学学报 ( 自然科学版 )
Jun l f hn cu nv ri f cec n eh ooy Naua cec dt n) orao C ag hnU i syo Sine d cnlg { trl i e io e t a T S n E i
Ab ta t I r e e l et ehg r cso sr c : n od rt rai ihp e iin, miitrzto dln a g a ueo b ouep oo lcr n o o z h nauiaina o gr eme s r f s lt h teet ce c - n n a i
译码 新方法 ,利用 2圈码道 实现 了 1 9位信 息编码 ,并推导 出相应的译码 公式 ,为编码 器高精度 、小型化建立 了新 的理论基础和技术 支持。在 多圈检测方式上 ,设 计 了2级齿轮 传动 的多圈测量结构,采 用了齿轮 刻缝 、读 圈的新方
法 。为 绝 对 式 多圈 光 电 编码 器 的发 展 、光 栅 检 测 技 术 的 应 用拓 展 了新 的 空 间 。
En o e s d o i t e a rx e d rBa e n S x e n M t i
S e , NG n c a g, HI W iDI Ho g h n CAO o u Gu h a
编码器的工作原理介绍

编码器的工作原理介绍一、光电编码器的工作原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
此外,为判断旋转方向,码盘还可提供相位相差90°的两路脉冲信号。
根据检测原理,编码器可分为光学式、磁式、感应式和电容式。
根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
(一)增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90o,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
(二)绝对式编码器绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有 N位二进制分辨率的编码器,其码盘必须有N条码道。
目前国内已有16位的绝对编码器产品。
绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。
绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。
一种新型四矩阵的绝对式编码盘

一种新型四矩阵的绝对式编码盘季英瑜【摘要】为满足编码器小型化、高测量精度的发展要求,解决编码盘输出位数与尺寸间的矛盾,通过对光电轴角编码器的核心元件编码盘的编码原理,码盘、狭缝盘的布局结构进行设计,提出了一种新型四矩阵的绝对式编码盘.该码盘具有三圈码道,且三圈码道的通光区段和非通光区段各自的总宽度均等于11.25°的整数倍.与之配合的狭缝盘具有三圈狭缝,狭缝窗口分布在90°范围内,有效地缩小了尺寸.在读取信号的方式上与传统的四矩阵编码方式相比,由四头读数改为单头读数.试验证明,由新型四矩阵的绝对式编码盘制成的编码器不存在误码现象,而且无需电子细分,可以输出十位格雷码,测角分辨率为0.351 562 5°,体积为φ30 mm×25 mm.实现了编码器结构简单、精度高、体积小的发展要求.【期刊名称】《实验室研究与探索》【年(卷),期】2014(033)006【总页数】4页(P65-68)【关键词】四矩阵式编码盘;狭缝盘;编码原理;小型化【作者】季英瑜【作者单位】衢州学院机械工程学院,浙江衢州324000【正文语种】中文【中图分类】TP212.140 引言码盘是光电轴角编码器的核心元件[1-3],由刻画一定图案(码道)的码盘和与之相配合的狭缝盘组成。
它是在玻璃或金属表面的圆环区域上刻有若干圈均匀分布的透光或不透光相间的栅线的圆分度元件,具有抗干扰能力强、无累积误差、掉电重启后无须重新对零等优点[4-5]。
随着工业现代化、军工、国防、科研等领域的发展,需要光电轴角编码器也趋向小型化、智能化。
若要满足要求,主要从两方面进行有效改善:① 缩小其核心元件——码盘及狭缝盘的径向尺寸;② 改变码盘上的码道编排方式 [6-7]。
但是,码盘与狭缝的尺寸缩小后,会影响码道区域的有效宽度,即要保证同等分辨率,如果码道数量不变,只能减少码道的宽度,这样对减小编码器尺寸的贡献很小;而保证码道宽度不变,只能是减少码道数量,这样又会造成编码器分辨率降低。
光电轴角编码器校准规范-绝对式编码器

当编码器不按准确度等级进行分级时, 其分度误差、 测角重复性要求在制造厂家的产品 标准中规定,也可由用户根据需要确定。 6 校准条件
6.1 环境条件 校准时的温度计温度变化应满足表 2 的要求。被校准编码器与校准所用标准器具应有 足够的平衡温度时间,通常应不少于 2h。被校准编码器应在接通电源 10min 后开始校准。 表 2 校准时的温度及温度变化要求 准确度级别 校准时的温度要求/(℃) 温度变化/(℃/h) 1 2 3 4 5 6 7 6.2 校准用标准器 校准用标准器见表 3. 表 3 校准用标准器 序号 1 标准器 校准单位: 九江精密测试技术研究所检测和校准实验室 23 面棱体 双轴光电自准直仪 (AUTOMAT ULTRA-2040 主机) 证书编号:J 字第 20100082 号 器具编号:201059 校准单位:中国计量科学研究院 证书编号:CDjc2011-0993 出厂编号:186515722 20±2 ≤0.5
20±3
≤1
20±5
Hale Waihona Puke ≤1223 面体光电自准直仪 编码器实际检测图片
7 校准项目和校准方法 7.1 用多面棱体-自准直仪校准 将多面棱体安装在编码器转轴上,并使 多面棱体轴线与编码器旋转轴线重合,同轴 度误差应不大于 0.5mm, ;棱体各工作面与 被检编码器的轴线的平行度(塔差)不大于 30″; 安放自准直仪, 使自准直仪视轴垂直于多面棱体工作面并对准多面棱体第一工作面中
图 1 用多面棱体 -自准直仪校准编码器示意图 1—多面棱体;2—多面棱体调整架;3—被校准编码器;4—自准直仪 编码器各测点 ai 的误差值计算公式见下式:
ei=(c i-qi)
式中:ai————编码器第 i 测点示值, i=1,2,…,n;
光电编码器辨向电路资料
光电编码器速度位置的数据在电机控制中起着非常重要的作用,其检测到的精确性能够直接影响电机控制的精度。
速度的测量方法有多种,如感应式转速传感器、测速发电机、光电式转速传感器、霍尔转速传感器以及旋转变压器式转速传感器等。
但目前调速系统速度以及位置反馈控制中应用较多的为光电编码器。
光电编码器是一种高精度的数字化检测仪器,是现代伺服系统广泛应用的角位移或者角速度的测量装置,它可以通过光电原理,将一个机械装置的角度或者位移量转化为电信号(数据串或者脉冲信号)。
光电编码器可分为绝对式和增量式两种,其中,绝对式光电编码器具有输出信号与旋转信号对应的特点,但是精度欠缺,成本高;增量式光电编码器输出信号为脉冲信号,脉冲个数和相对旋转位移相关,与旋转的绝对位置无关,成本相对于绝对式更低,并且精度高、体积小、响应快、性能稳定等特点。
如果预先设置一个基准位置,则可以利用增量式编码器完成绝对式编码器的功能,即也可以测出旋转的绝对位置。
实现绝对式编码器的功能,也即可以测出旋转的绝对位置。
增量式光电编码器在高分辨率、大量程角速率、位移的测量中,它更具有优势。
因而,在这个手指康复机器人系统中采用增量式光电编码器。
增量式光电编码器主要是由机械系统、数据扫描系统和电气系统三个部分组成。
其中机械系统主要负责外壳和转动的支撑作用。
电气系统的作用主要是保护、放大、抗干扰以及数据传输等等。
增量式光电脉冲编码器由光源、聚光镜、挡光板、码盘、检测光栅、光电检测器件和转换电路组成。
在光电码盘上刻度盘上均匀分布一定数量的光栅,光挡板(检测光栅)上刻有A、B相两组与光电码盘上光栅相对应的透光缝隙。
增量式光电脉冲编码器工作时,光电码盘随着工作轴旋转,但是光挡板(检测光栅)保持不动。
有光同时透过光电码盘和检测光栅时,电路中产生逻辑“1”信号,没有透光时产生逻辑“0”信号,从而产生了A、B两相的脉冲信号。
由于检测光栅上的A、B相两个透光缝隙的节距与光电码盘上光栅的节距是一致的,并且这两组透光缝隙错开四分之一的节距,从而使得最终信号处理输出的信号存在90°的相位差。
一种三相异步电机的转速测量实现方法
一种三相异步电机的转速测量实现方法高鹏;王步来;季文彪;高响;陈雪琴【摘要】介绍了增量式光电编码器的常用数字测速方法以及TI公司DSP芯片TMS320F2812的正交解码电路的工作原理,在此基础上设计了用于测量转速的硬件电路,使用了测量电机转速的M法.实验结果表明,该方案准确、可靠,实用.【期刊名称】《通信电源技术》【年(卷),期】2014(031)004【总页数】3页(P62-64)【关键词】TMS320F2812;正交解码电路;光电编码器【作者】高鹏;王步来;季文彪;高响;陈雪琴【作者单位】上海海事大学,上海201306;上海海事大学,上海201306;上海海事大学,上海201306;上海海事大学,上海201306;上海海事大学,上海201306【正文语种】中文【中图分类】TM3430 引言在三相异步电机矢量控制系统中,通常将光电编码器作为检测元件来测量电机的转速及电机位置,光电编码器能输出 A+、B+ 、Z+、A-、B-、Z-六路脉冲信号,经过信号处理以后接至DSP的正交解码(QEP)电路,则可完成CPU对电机转速的检测。
本文采用美国TI公司推出的专为电机调速设计的数字信号处理器TMS320F2812,其具有特殊功能模块——正交编码(QEP)电路,可与光电编码器相连,用于转速的测量。
其中QEP电路内部设有转向判别和倍频功能,无需添加其他辅助电路,接口电路设计简单,而且F2812具有四个功能强大的通用定时器,可灵活应用于各种测速方法。
光电编码器以其结构简单、低噪声、成本低、精度高和线性度好的优点被广泛应用于转速测量。
1 数字测速方法采用光电编码器的数字测速法一般有三种[1]:周期法(M法)、频率法(T法)和周期/频率法(M/T法),M/T法是前两种方法的结合,同时检测一定数量的反馈脉冲和产生这些脉冲所需的时间,在整个速度范围内都有较好的准确性,但是对于超低速应用条件,动态响应慢,需要较长的检测时间才能保证检测结果的准确度。
光电编码器在工业数控加工中的应用探析
光电编码器在工业数控加工中的应用探析一、光电编码器的原理及结构光电编码器是一种利用光电转换原理来测量旋转位置和运动方向的传感器。
其主要由光电检测单元、光源、光栅和信号处理电路组成。
在工作时,光源发出光线,经过光栅后被光电检测单元接收,根据光栅的特殊结构,可以测量出旋转的角度和方向,并将其转换为数字脉冲信号输出。
光电编码器广泛应用于工业自动化控制系统中,可以精确测量位置、速度和角度,并实现高精度的位置反馈控制。
1. 位置反馈控制在数控加工中,利用光电编码器可以实现对加工机床、工件和刀具的精准位置控制。
通过安装光电编码器在各个运动轴上,可以实时监测每个轴的位置和运动状态,反馈给数控系统进行闭环控制。
这样可以确保加工精度和重复定位精度,提高加工质量和效率。
2. 实现多轴同步控制在复杂的数控系统中,常常需要实现多个运动轴的同步运动,以完成复杂的加工任务。
利用光电编码器可以实现多轴之间的同步控制,确保它们的运动速度和位置保持一致,从而实现高精度、高效率的加工。
3. 检测刀具磨损和断刀光电编码器可以安装在刀具主轴上,实时监测刀具的旋转速度和位置,通过对比实际数值和设定数值,可以判断刀具的磨损程度,及时进行更换。
若刀具发生断裂,光电编码器也可以实时监测到异常信号,及时停机报警,保障设备和人员的安全。
4. 监测工件尺寸和形状在数控加工中,需要对加工零件的尺寸和形状进行实时监测和修正,以确保加工质量。
光电编码器可以安装在加工工具或工件上,实时监测位置和角度,与数控系统建立反馈控制环,及时调整加工参数,确保工件的尺寸和形状符合要求。
三、光电编码器在工业数控加工中的优势1. 高精度和高分辨率光电编码器可以实现高精度的位置测量,能够满足工业数控加工对位置和角度的精确要求。
它具有高分辨率的特点,可以实现微小角度和位置的测量,确保加工精度。
2. 抗干扰性能光电编码器采用光电转换原理,不受传统的磁性干扰,具有较好的抗干扰性能,能够在工业生产现场复杂的环境中稳定可靠地工作。
基于aurix开发板的gpt12正交编码器输入译码开发案例
基于aurix开发板的gpt12正交编码器输入译码开发案例全文共四篇示例,供您参考第一篇示例:摘要:AURIX是英飞凌(Infineon)公司的一个高性能多核微控制器平台,具有较强的实时性能和安全特性。
GPT12正交编码器输入译码是一种常见的电子系统输入设备,用于测量旋转设备的角度、速度和位置信息。
本文将介绍基于AURIX开发板的GPT12正交编码器输入译码开发案例,探讨其应用和实现方法,旨在为相关开发人员提供参考和借鉴。
1. 简介正交编码器是一种能够提供位置和速度信息的传感器,通常由两个输出通道组成,分别为A相和B相。
GPT12是AURIX微控制器系列中的一个通用定时器模块,能够对正交编码器输入信号进行高精度的译码和处理。
基于AURIX开发板开发的GPT12正交编码器输入译码方案,可以实现对旋转设备角度和速度信息的准确获取和实时处理,广泛应用于工业自动化、机械控制、电动车辆等领域。
2. 开发环境基于AURIX开发板的GPT12正交编码器输入译码开发,需要搭建相应的开发环境。
首先需要在PC端安装开发软件,如Davinci开发工具套件,用于对AURIX微控制器进行代码编写、调试和下载。
需要准备AURIX开发板和GPT12正交编码器等硬件设备,确保硬件连接正确并能够正常通信。
需要编写相关的译码代码,并将其下载到AURIX开发板中进行测试和调试。
3. 译码实现基于AURIX开发板的GPT12正交编码器输入译码的实现,主要包括以下几个步骤:配置GPT12模块的输入引脚和工作模式,设置中断和定时器参数,编写中断服务程序,对正交编码器输入信号进行采样和译码处理。
需要特别注意中断服务程序的编写和优化,保证能够及时响应和处理正交编码器输入信号,在保证实时性和精度的减少系统资源的占用和能耗。
4. 应用案例基于AURIX开发板的GPT12正交编码器输入译码方案,可以应用于各种旋转设备的控制和监测。
在工业自动化领域,可以应用于数控机床、自动装配线等设备中,实时监测旋转部件的角度和速度信息,并进行精准的位置控制和运动规划。
光电编码器介绍 1光电编码器原理 光电编码器,是一种通过光电转换将

光电编码器介绍1.光电编码器原理光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
此外,为判断旋转方向,码盘还可提供相位相差90旱牧铰仿龀逍藕拧根据检测原理,编码器可分为光学式、磁式、感应式和电容式。
根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1.1增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90海佣煞奖愕嘏卸铣鲂较颍鳽相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
1.2绝对式编码器绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。
显然,码道越多,分辨率就越高,对于一个具有 N位二进制分辨率的编码器,其码盘必须有N条码道。
目前国内已有16位的绝对编码器产品。
绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。
绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传感器 与微 系统( rndcr n coytm T cnlg s Tasue dMir s eh o i ) a角 编 码 器 译 码 方 法 研 究
陈兴 林 ,刘 杨 ,吕恒毅
( 哈尔滨工业大学 控制科学与工程 系 , 黑龙江 哈尔滨 1 00 ) 5 0 1
e c d r i eibl n s v r nvr n nt n o e S rla e i e e e e io me .
Ke od :p oolc i l noe ; dpi eo e; it l rd i in rcs r D P yw r s ht etc cdr aat ed cd r dg a ft ;i t s a poes ( S ) e ra e v i i e g a gl l l o
0 引 言
提高了编码器的环境适应性 和可靠性 。
1 绝 对 式 光 电编 码 器 工 作 原 理
绝对式光 电轴角编码器 是一 种集 光 、 、 机 电一体 的数字 测角装置 , 泛应 用于工业控制 、 空航天等高精度计算机 广 航 控制系统 中。它作为控 制系 统的传感 器部分 , 当 于整个 相 系统 的眼睛 , 其精度直接 影响着 整个 系统 的性 能指 标 。而
摘
要 :针对光电轴角编码器 的光 电流信 号变化对传统译码 电路结 果有很 大影响 的问题 , 出了一种新 提
型译 码方法及其硬件 电路实现 。该方 法采 用全数字方案获 取编码器 的原始信 息 , 自适应地 改变译 码算法
所需 的关 键参数 , 对环境 变化等因素进行补偿 。为 了获得最佳 的滤波效果 , 滤波器参 数 随转 速改 变 , 使 对 粗码 信号进行智能滤波处理 。在空 间激光链路 的高精度编码 器应用 中 , 方法大大 减少 了译 码 电路 调试 此
和光 电编码器机械装调 的工作量 , 降低 了由各种环境变化 和干扰造 成的误码率 。 关键 词 :光电编码器 ;自适应译 码 ; 数字滤 波 ; 数字信号处理器
中图分类号 :T 1 P2 2 文献标识码 :A 文章编号 :10 -7 7 2 1 )2- 1-3 00 9 8 (0 0 0- 0 90 0 -
( e at n o o to Sinea dE gneig H ri ntueo Dpr met. C nrl ce c n n ier , a bnIsi t f f n t
T c n lg , r i 50 1 C ia eh oo y Habn10 0 , hn )
Ab ta t Ai d a h r b e fa i l n l n o e a e g e t n u n eo h e u t fc a g f r dt n l s r c : me tt e p o l m o x a ge e c d rh v r a f e c n t e r s l o h n e o a i o a a il t i d c d rcr ut a n w meh d o e o e a d i a d r i u t mp e n sp e e t d A f l d g tls h me i e o e i i , e t o fd c d n t h r wa e cr i i l me ti r s n e . u l ii c e s c s c a u e n t i to f n o e o o t i h rgn n omai n T e k y p r mee s c n b h n e d p i ey s d i h smeh d o c d rt b an t e oi ia ifr t . h e a a tr a e c a g d a a t l e l o v a d e vr n n a ai t n c n b o e s t d An i tl g n l ri u e o i o i g 6 a s in ,o g tb s n n i me tl rai a e c mp n ae . el e tf t s d f r s sn o r e s a t e e t o v o n i ie s d p gl p ro ma c ff tra d ma e t e p r me e so l rc a g d w t n o e ’ p e . r c ie h ss o a e ef r n e o l n k h a a t r f f t h n e i e c d r S s e d P a t a h wn t t h ie ie h c h t w r la f ta sai g c ru t S d b g i g a d p oo l cr a n o e S i salt n i r d c d g e t . h o k o d o r n l t - i i ’ e u gn n h t ee ti l e c d r’ n t l i s e u e r al T e n c c ao y
Re e r h o w c d e h d o 0 0 l c r c le o e s a c n ne de o e m t o fph t ee t ia nc d r
C HEN Xigl n — n.L U n .L n —i i I Ya g 0 He gy