接触分析注意问题
接触问题总结

接触问题总结kiang检查所定义的接触面、接触参数和边界条件是否正确;在静力分析中,必须定义足够的约束条件,以消除各个平移和转动自由度上的刚体位移;`/p@g:~]!M 避免过约束(overconstraint);T4I%i,@4O 合理地定义接触面、接触参数和过盈配合;2``-a-z1PWw 使用足够细化的网格f ?2r%x+O 不要在接触面上使用C3D20、C3D20R和C3D10等单元;在接触对上设置微小的过盈量,以保证在分析的一开始就已经建立起接触关系;施加临时边界条件,以保证在接触关系建立之前,模型也不会出现刚体位移;型上,避免使接触状态发生剧烈的改变我的模型本来是线性问题,以前做线性分析时,计算只需要20分钟,最近我在模型中加了接触单元,求解时变成非线性的了,可是计算时间超长,从昨天下午一直到现在还在继续,而且所在的工作目录文件夹已经达到17G多了,目前里面有6个后缀分别为tri, tri02, tri03, tri04, tri05, tri06的文件,每个都有2.9G(我用命令/config,fsplit,750控制了一下)我对非线性还不了解,在求解时我设time=100,关闭了自动时间步长开关,设substep为1。
不知道是不是这里的原因?这里的time 是什么意思呢?还想请问一下,网格的疏密跟计算是否收敛有没有什么关系?我以前将网格放大一倍后可以计算,而且结果还比较满意,只是精度我觉得不够。
收敛与你设置的步长有关,好像与网格的疏密关系不大!一般使用的方法都是条件收敛的!有一个满足收敛的最大步长!步长大了不收敛,小了耗费大量计算时间。
建议重新设置步长,推荐使用默认时间步长time是载荷步,如果只有一种载荷情况的话,设为1就行了,substeps是载荷子步,对非线性问题,子步数决定将最终载荷加到结构上的分数,子步数多每步加载的值少,耗时长,但容易收敛,经济的做法是将子步数设小一点,如30,50(具体看问题),然后打开自动时间步,程序会在不收敛的时候自动增加时间步,你的substeps设成1,time设成100,可能是有问题的9U b F%{v _)Hb6_6s!\\将分析过程分解为多个分析步来完成,让各个载荷分别在不同的分析步中逐步施加到模线性分析就用20分钟,模型大,也许你的计算机配置太低,接触分析很费时间,你的子步数可设置成30左右,最大子步设置成200左右,打开自动时间步,线性收索开关---------------------------------------qitangren请教载荷越小反而不收敛做的是一个简单壳和实体接触的模型,加分布力(10或者8)在壳上结果收敛,而加分布力(1)却不收敛,是什么原因啊。
abaqus接触问题分析
abaqus接触分析1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。
如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。
2、接触对中的sl ave surface应该是材料较软,网格较细的面。
3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQU S会认为两个面没有接触:*Contact Pair, interac tion="SOIL PILE SIDE CONTACT", small sliding,adjust=0.2.4、定义tie时也应该设定类似的posit ion toleran ce:*Tie, name=ShaftBo ttom, adjust=yes, positio n toleran ce=0.15、msg文件中出现zeropivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了t ie,又定义了con tact, 出现过约束。
解决方法是在选择tie或c ontact的slave surface时,将类型设为no de region,然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。
6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在ini tial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。
边界条件也是这样。
7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。
接触问题总结
接触问题总结kiang检查所定义的接触面、接触参数和边界条件是否正确;在静力分析中,必须定义足够的约束条件,以消除各个平移和转动自由度上的刚体位移;`/p@g:~]!M避免过约束(overconstraint);T4I%i,@4O合理地定义接触面、接触参数和过盈配合;2``-a-z1P W w使用足够细化的网格 f ?2r%x+O不要在接触面上使用C3D20、C3D20R和C3D10等单元;在接触对上设置微小的过盈量,以保证在分析的一开始就已经建立起接触关系;施加临时边界条件,以保证在接触关系建立之前,模型也不会出现刚体位移;9U b F%{v _)H b6_6s!\将分析过程分解为多个分析步来完成,让各个载荷分别在不同的分析步中逐步施加到模型上,避免使接触状态发生剧烈的改变我的模型本来是线性问题,以前做线性分析时,计算只需要20分钟,最近我在模型中加了接触单元,求解时变成非线性的了,可是计算时间超长,从昨天下午一直到现在还在继续,而且所在的工作目录文件夹已经达到17G多了,目前里面有6个后缀分别为tri, tri02, tri03, tri04, tri05, tri06的文件,每个都有2.9G(我用命令/config,fsplit,750控制了一下)我对非线性还不了解,在求解时我设time=100,关闭了自动时间步长开关,设substep为1。
不知道是不是这里的原因?这里的time 是什么意思呢?还想请问一下,网格的疏密跟计算是否收敛有没有什么关系?我以前将网格放大一倍后可以计算,而且结果还比较满意,只是精度我觉得不够。
收敛与你设置的步长有关,好像与网格的疏密关系不大!一般使用的方法都是条件收敛的!有一个满足收敛的最大步长!步长大了不收敛,小了耗费大量计算时间。
建议重新设置步长,推荐使用默认时间步长time是载荷步,如果只有一种载荷情况的话,设为1就行了,substeps是载荷子步,对非线性问题,子步数决定将最终载荷加到结构上的分数,子步数多每步加载的值少,耗时长,但容易收敛,经济的做法是将子步数设小一点,如30,50(具体看问题),然后打开自动时间步,程序会在不收敛的时候自动增加时间步,你的substeps设成1,time设成100,可能是有问题的线性分析就用20分钟,模型大,也许你的计算机配置太低,接触分析很费时间,你的子步数可设置成30左右,最大子步设置成200左右,打开自动时间步,线性收索开关---------------------------------------qitangren请教载荷越小反而不收敛做的是一个简单壳和实体接触的模型,加分布力(10或者8)在壳上结果收敛,而加分布力(1)却不收敛,是什么原因啊。
基于ABAQUS 软件的热冲压成形接触问题分析

1引言ABAQUS 是一套功能非常强大的工程模拟仿真软件,拥有各种类型的材料模型库,可以模拟各种工程领域的许多问题,例如,热传导、热电耦合分析、声学分析、岩土力学分析以及压电介质分析[1,2]。
ABAQUS 拥有十分强大的处理高度复杂非线性问题的能力,具有模拟复杂系统问题的高度可靠性,被广泛应用于在各国工业和研究所中。
但是在国内ABAQUS 的普及率远不如ANSYS ,不仅中文的资料少,而且可供新手学习的例子少,尤其是对比较复杂的接触问题的介绍更少。
在现实世界中,有许许多多的工程项目问题都涉及接触问题,如运动中火车轮与钢轨的接触、切削中车刀与工件的接触、冲压时模具与毛坯间的接触,等等。
在接触过程中,两个物体在接触界面上的相互作用是复杂的力学现象,接触问题常常同时涉及三种非线性:大形变引起的材料非线性、几何非线性和接触界面的非线性,再加上接触界面的事先未知性和接触条件的不等式约束,决定了接触分析过程属于高度非线性的,不仅需要花费较多的计算机资源,而且收敛难度较大。
本文从汽车防撞梁的热冲压成形出发,基于ABAQUS 软件对接触问题进行分析研究。
2ABAQUS 接触分析的关键问题接触分析中需要注意的常见问题包括:单元类型的选择和网格质量的控制、接触关系的建立、相对滑动、主从面的定义等[3]。
ABAQUS 软件提供了非常丰富的单元种类,在给用户提供更多选择的同时,也增加了用户选择适合自己模型的单元类型的难度,人们要清楚自己计算的目的是什么,然后选择合适的单元类型。
例如,热冲压成形模型,涉及温度变化和形变,就这需要选择温度—位移耦合类型。
网格质量的控制,ABAQUS 软件是通过Verify Mesh 检查模型网格质量,可以检查出分析过程中会导致错误和警告信息的单元,想要获得精确的计算结果,完美的单元质量是必不可少的。
接触关系的建立,人们在建立接触对时,首先要搞清楚主从面的定义,一般选择刚度较大的一面作为主面,柔性材料作为从面,而解析面和刚体面必须作为主面。
abaqus接触分析的常见问题
之马矢奏春创作CAE(计算机辅助工程)是一门复杂的工程科学,涉及仿真技术、软件、产物设计和力学等众多领域.世界上几年夜CAE公司各自以其独到的技术占领着相应的市场.ABAQUS有限元分析软件拥有世界上最年夜的非线性力学用户群,是国际上公认的最先进的年夜型通用非线性有限元分析软件之一.它广泛应用于机械制造、石油化工、航空航天、汽车交通、土木工程、国防军工、水利水电、生物医学、电子工程、能源、地矿、造船以及日用家电等工业和科学研究领域.ABAQUS在技术、品质和可靠性等方面具有卓越的声誉,可以对工程中各种复杂的线性和非线性问题进行分析计算.《ABAQUS有限元分析罕见问题解答》以问答的形式,详细介绍了使用ABAQUS建模分析过程中的各种罕见问题,并以实例的形式教给读者如何分析问题、查找毛病原因和检验考试解决法子,帮手读者提高解决问题的能力.《ABAQUS有限元分析罕见问题解答》一书由机械工业出书社出书.【罕见问题16-1】在ABAQUS/Standard分析中界说接触时,可以选择点对面离散方法(node-to-surface-dis-cre-tization)和面对面离散方法(surface-to-surfacediscretization),二者有何分歧?『解答』在点对面离散方法中,从面(slavesurface)上的每个节点与该节点在主面(mastersurface)上的投影点建立接触关系,每个接触条件都包括一个从面节点和它的投影点附近的一组主面节点.使用点对面离散方法时,从面节点不会穿透(penetrate)主面,可是主面节点可以穿透从面.面对面离散方法会为整个从面(而不是单个节点)建立接触条件,在接触分析过程中同时考虑主面和从面的形状变动.可能在某些节点上呈现穿透现象,可是穿透的水平不会很严重.在如图16-l和图16-2所示的实例中,比力了两种情况.1)从面网格比主面网格细:点对面离散(图16-1a)和面对面离散(图16-2a)的分析结果都很好,没有发生穿透,从面和主面都发生了正常的变形.2)从面网格比主面网格粗:点对面离散(图16-1b)的分析结果很差,主面节点进入了从面,穿透现象很严重,从面和主面的变形都不正常;面对面离散(图16-2b)的分析结果相对较好,尽管有轻微的穿透现象,从面和主面的变形仍比力正常.从上面的例子可以看出,在为接触面划分网格时需要慎重,无论使用点对面离散还是面对面离散,都应尽量保证从面网格不能比主面网格粗.关于从面和主面的选择方法,请拜会《实例详解》第5.2.2节“界说接触对”.选用离散方法时,还应考虑以下因素.1)一般情况下,面对面离散获得的应力和压强的结果精度要高于点对面离散.2)面对面离散需要分析整个接触面上的接触行为,其计算价格要高于点对面离散.一般情况下,二者的计算价格相差不是很悬殊,但在以下情况中,面对面离散的计算价格将会年夜很多:①模型中的年夜部份区域都涉及到接触问题.②主面的网格比从面的网格细化很多.③接触对中包括了多层壳,一个接触对中的主面是另一接触对中的从面.3)如果从面是基于节点的(即从面类型为NodeRegion,而不是Surface),则不能使用面对面离散化方法.相关内容的详细介绍,请拜会ABAQUS6.7帮手文档《ABA QUSAnalysisUser’sManual》第29.2.1节“Definingcontactpai rsinABAQUS/Standard”.【罕见问题16-2】提交ABAQUS/Standard分析作业后,为何在MSG文件中看到以下提示信息:OVERCLOSEDBY0.0512228WHICHISTOOSEVERE.(呈现了严重的过盈接触)『解答』可以从以下几个方面查找原因:1)如果上述提示信息中所提到的接触面是刚体、壳单位、膜单位、梁单位或桁架单位上的面,则有可能是在界说此接触面时没有选择正确的发生接触的那一侧,即接触面的法线方向毛病.提示:对可变形的实体单位,ABAQUS/CAE会自动选择正确的法线方向(指向实体的外部).当接触面的法线方向毛病时,如果使用了点对面离散,会在MSG 文件中看到上述提示信息,分析无法收敛.如果使用了面对面离散,不会呈现上述提示信息,分析仍然可以完成,但分析结果是异常的(例如呈现严重的穿透现象).在Visualization功能模块中可以显示接触面的法线方向,方法是单击(CommonOptions)按钮,在Normals标签页下选中Show normals(如图16-3所示),而且要注意选择Onsurfaces(面的法向),而不是Onelements(单位的方向).另外,在云纹图的模式下不能显示解析刚体概况的法向,只有在未变形图或变形图的模式下才可以显示.一对接触面的法向应该是互相指向对方的,第16.3.2节“接触分析综合实例2”提供了一个接触面法线方向界说毛病的实例.2)如果接触面的法线方向是正确的,但分析仍无法收敛,应检查模型中的过盈量是否太年夜.如果存在此问题应修改模型,令过盈量从O开始逐渐增年夜,例如,可以使用,CONTACTINTERF ERENCE和线性递增的幅值曲线界说过盈接触,详见《实例详解》第5.2.4节“设定接触面之间的距离或过盈量”.3)如果接触面的法线方向是正确的,这种“过盈量太年夜”的信息只是在MSG文件中偶尔呈现,而且呈现此信息的分析步最终能够收敛,分析结果也一切正常,就没有问题.在接触分析的求解过程中,ABAQUS/Standard会迭代检验考试各种可能的位移状态,如果某个位移状态造成过盈量太年夜,ABAQUS/Standard就会显示上述提示信息,然后检验考试另外一个位移状态.换言之,这个太年夜的过盈量有可能仅仅是ABAQUS /Standard在检验考试求解过程中的一个中间状态,其实纷歧定是模型自己存在毛病.在《实例详解》第6.4节“实例3:弯曲成形过程模拟”的实例中,就可以在随书光盘的以下MSG文件中看到类似的“过盈量太年夜”的提示信息:\Dem06-Forming\AnalysisResults\Forming. msg.【罕见问题16-3】什么是有限滑动(finitesliding)和小滑动(smallslidin g)?『解答』在ABAQUS/Standard分析中界说接触时,有两种判断接触状态的跟踪方法可供选择:1)有限滑动.如果两个接触面之间的相对滑动或转动量较年夜(例如,年夜于接触面上的单位尺寸),就应该选择有限滑动,它允许接触面之间呈现任意年夜小的相对滑动和转动.在分析过程中,ABAQUS将会不竭地判断各个从面节点与主面的哪一部份发生了接触,因此计算本钱较高.在使用有限滑动、点对面离散时,应尽量保证主面是光滑的,否则主面的法线方向会呈现不连续的变动,容易呈现收敛问题.在主面的拐角处应使用过渡圆弧,并在圆弧上划分足够数量的单位.在使用点对面离散时,如果主面是变形体或离散刚体的概况, ABAQUS/Standard会自动对不单滑的主面做平滑(Smoothing)处置,默认的平滑系数为0.2.面对面离散则没有这种平滑功能,因此如果工程实际要求主面必需有尖角,使用点对面离散可能会比面对面离散更容易收敛.2)小滑动.如果两个接触面之间的相对滑动或转动量很小(例如,小于接触面上单位尺寸的20%),就可以选择小滑动.在分析开始时刻,ABAQUS就确定了各个从面节点与主面是否接触、与主面的哪个区域接触,并在整个分析过程中坚持这些关系不变,因此计算本钱较低.关于有限滑动和小滑动的详细介绍,请拜会《实例详解》第5.2.3节“有限滑移和小滑移”和ABAQUS6.7帮手文档《ABAQUSA nalysisUser'sManual》第29.2.2节“Contactformul-ationforA BAQUS/Sta ndardcontactpairs”.【罕见问题16-4】分析接触问题时,是否必需在Step功能模块中翻开几何非线性开关(将Nlgeom设为ON)?『解答』只有分析几何非线性问题(年夜位移、年夜转动、初始应力、几何刚化或突然翻转等)时才需要将Nlgeom设为ON.接触分析是非线性问题,但纷歧定是几何非线性问题,罕见的情况有以下几种:1)如果接触面之间会发生较年夜的相对位移或转动,则界说接触时应选择有限滑动,并将Nlgeom设为ON.2)如果接触面之间的相对位移和转动都很小,模型各处都不会发生年夜的位移或转动,则界说接触时应选择小滑动,并将Nlge om设为OFF.3)如果接触面之间的相对位移和转动都很小,但模型呈现了年夜的位移或转动(例如刚体转动),则界说接触时应选择小滑动,并将Nlgeom设为ON.将Nlgeom设为ON可能会增加模型收敛的难度,增加计算本钱.但如果模型发生了年夜的位移或转动,而仍将Nlgeom设为OFF,也可能招致计算不收敛.关于非线性问题的详细介绍,请拜会本书第15.1节“线性分析与非线性分析”.【罕见问题16-5】壳或膜单位都是有厚度的,但在ABAQUS/CAE中它们被显示为无厚度的面.在ABAQUS/Standard中为它们界说接触时,是否需要让接触面之间保管一定距离,以体现其厚度?『解答』有以下几种可能的情况:1)如果选择了点对面离散的小滑动、面对面离散的小滑动或面对面离散的有限滑动,默认情况下ABAQUS/Standard会考虑壳或膜的厚度,在建模时应根据厚度让接触面之间保管相应的距离.如果希望忽略壳和膜的厚度,可以在界说接触时选中Excludeshell/ membraneelementthickness.提示:默认情况下,壳或膜在ABAQUS/CAE中的面是它们的中性面.如果需要,可以偏置此面,相关内容请拜会ABAQUS6.7帮手文档《ABAQUSAnalysisUser’sManual》第23.6.3节“Definingthein itialgeometryofconventionalshellelements”.2)如果选择了点对面离散的有限滑动,或者从面类型是基于节点的,则无法考虑壳或膜的厚度.。
接触分析

ANSYS有三种类型的接触单元:点对点:最终位置事先知道;只能用于低次单元点对面:接触区域未知,并且允许大滑动;面对面:接触区域未知,并且允许大滑动(相对点对面接触有几个优点)。
接触分析属于高度非线性分析,需要较多的计算资源,这对网格划分以及接触面的选择提出了较高要求。
ansys可完成的接触分析主要有三类:点点,点面,面面接触分析;接触分析主要分为两类:刚体—柔体接触以及柔体—柔体接触。
其中,金属成型分析是典型的刚体柔体接触,一般的接触的问题均为柔体——柔体接触。
★分析的难点在于:1.接触面的识别和选择;2.摩擦模型的选择。
ansys接触分析是通过建立一层接触单元覆盖在接触面之上点点接触一般较少使用,它适用于:预先知道接触位置,且相对滑动忽略,转动量很小,即使是几何非线性分析。
一些过盈装配问题可以采用点点接触代替面面接触;点面接触不需要知道确切接触位置,也不必保持网格一致,允许较大的变形和相对滑动。
这种接触推荐采用contact48而不是26来计算;面面接触是最为常见也是适用范围较广的接触类型:★几个原则(asymmetric contact):接触单元不能渗入目标面,但是目标(面上的)单元可以渗入接触面。
目标面总是刚性的,接触面总是柔性的。
平面或者凹面为目标面;网格细致的为接触面,网格粗糙的为目标面(目标面可以被渗入);The softer surface should be the contact surface and the stiffer surface should be the target surface.高阶单元为接触面,低阶为目标面;However, for 3-D node-to-surface contact, 低阶单元为接触面,高阶为目标面;面积大的是目标面。
In the case of 3-D internal beam-to-beam contact modeled by CONTA176 (a beam or pipe sliding inside another hollow beam or pipe),内部的为接触面,外部为目标面;However, when the inner beam is much stiffer than the outer beam, the inner beam can be the target surface.若不能很好的区分接触面和目标面(When there are several contact pairs involved in the model, and the graphical picking of contact and target surfaces is difficult, you can just define the symmetric contact pairs and, by setting KEYOPT(8) = 2)可采用对称接触分析(Symmetric Contact),即通过设置KEYPOINT(8)=2 实现。
Ansys接触分析帮助文档-翻译
Ansys帮助文档-接触分析侯峰整理1.接触分析overview接触问题是高度非线性的,需要大量的计算机资源来解决这类问题。
解决这类问题时,需要你对物理问题有足够的了解,花足够的时间建立模型,再用尽量好的计算资源进行求解。
接触问题有两个很明显的难点。
第一,在对问题求解之前,我们是不知道接触区域的位置的。
在不同的载荷、材料、边界条件以及其他一些因素的情况下,表面之间可能以不可预知的奇怪的方式在较大尺度上彼此侵入与分离接触面。
第二,大多数接触问题需要考虑到摩擦。
有几种摩擦准则与模型可供选择,他们都是非线性的。
由摩擦产生的反应可能很复杂,导致求解的收敛困难。
除上述两种困难之外,在许多接触问题中,我们不得不强调多域情况下的影响,例如材料的导热率,电流强度以及在接触区域内的磁通量等。
如果在你的模型中不需要考虑摩擦的影响,且体之间的交互影响是确定的,那么,你就可以采用内部的多点约束来对模型进行约束。
另外一个选择是使用约束等式或者成对的自由度约束来进行约束。
这些外部约束方程或者耦合方程仅仅适用于小应变的情况。
除在这个guide中讨论的间接的接触问题外,ansys也能够提供采用ansys ls-dyna动态分析的系列产品进行分析。
直接分析套件对于分析暂态问题非常有用。
1.1一般的接触分类方法接触问题分为两类:刚体-刚体与柔体-柔体问题。
在刚体-柔体接触问题中,一个或多个的接触面被认为是刚性的。
一般来说,任何时候,只要是分析一个硬质材料与一个较软材料的接触问题,都被假设为刚体-柔体问题。
另外一类的问题,即柔体-柔体分析,是更加常见的一类问题。
在这类问题中,两个接触面都被认为是可变形的。
1.2接触分析的能力1.3面-面接触分析单元Ansys提供刚体-柔体接触、柔体-柔体接触的面-面分析单元。
这类分析单元采用一个“目标面”与一个“接触面”来组成一个接触对。
●目标面用TARGE 169(2-D) 与TARGE 170(3-D)两类单元●接触面用CONTA 171、CONTA 172、CONTA 173 、CONTA 174四类单元。
abaqus点面接触注意事项
abaqus点面接触注意事项全文共四篇示例,供读者参考第一篇示例:Abaqus是一款常用的有限元分析软件,在使用中常常涉及到点面接触。
点面接触是在分析中经常遇到的一种情况,它是指在不同几何形状的结构或零件之间可能发生的接触现象。
在使用Abaqus进行点面接触分析时,有一些注意事项是需要特别注意的,下面我们来详细介绍一下。
要注意建立合适的模型。
在进行点面接触分析之前,需要对几何模型进行准确建模。
确保模型中所有的几何特征都得到充分考虑,包括接触面的几何形状和尺寸等。
还需要确保模型的边界条件设置正确,以及模型的单元划分合理,单元质量良好。
只有建立了合适的模型,才能保证接触分析结果的准确性。
要注意选择合适的接触类型。
在Abaqus中,有多种不同的接触类型可供选择,如“全局表面到面”接触、“局部表面到面”接触等。
在进行点面接触分析时,需要根据具体的问题情况选择合适的接触类型。
如果选择了错误的接触类型,可能会导致接触分析无法收敛或者结果不准确。
要注意设置合适的接触参数。
在进行点面接触分析时,需要设置一些接触参数,如接触摩擦系数、接触刚度等。
这些参数的设置直接影响到接触分析结果的准确性和收敛性。
需要在进行接触设置时,仔细调整这些参数,确保其合适性。
要注意进行接触区域的生成。
在进行点面接触分析时,需要生成接触区域,即在接触面上生成网格。
接触区域的生成需要满足一定的准则,如网格密度要适中,要保证较小的单元可以精细地描述接触情况。
还需要注意接触面的几何形状,确保接触面的几何特征得到充分考虑。
要注意进行接触后处理。
在完成点面接触分析后,需要进行后处理分析,以获取准确的结果。
在后处理过程中,需要关注接触压力分布、接触面滑移情况等。
通过对这些信息的分析,可以评估接触分析的准确性和有效性。
进行Abaqus点面接触分析时,需要注意建立合适的模型、选择合适的接触类型、设置合适的接触参数、生成合适的接触区域以及进行合适的接触后处理。
abaqus点面接触注意事项
abaqus点面接触注意事项全文共四篇示例,供读者参考第一篇示例:Abaqus是一款广泛应用的有限元分析软件,用于对结构、零件等进行力学性能分析。
在使用Abaqus进行模拟分析时,点面接触是一个非常常见的接触形式,也是模拟分析中一个非常重要的环节。
点面接触涉及到点和面之间的接触行为,因此在进行模拟分析时需要特别注意一些关键的注意事项,以确保分析结果的准确性和可靠性。
首先,对于点面接触的定义和模拟方法需要有清晰的认识。
点面接触是指两个物体之间的接触行为,其中一个物体的接触部分是一点,而另一个物体的接触部分是一面。
在Abaqus中,点面接触通常通过定义接触对来实现,其中一个面的节点称为接触法线面,另一个面的节点称为接触表面。
通过定义接触对的方式,可以模拟点面接触的力学行为。
其次,在进行点面接触模拟时,需要注意选取适当的接触算法和参数设置。
在Abaqus中,有多种接触算法可供选择,如基于界面法、基于节点法等。
不同的接触算法适用于不同类型的接触问题,因此需要根据具体情况选择合适的接触算法。
此外,还需要设置接触参数,如接触刚度、摩擦系数等,以确保点面接触的力学行为与实际情况相符。
另外,在进行点面接触模拟时,需要考虑到接触状态的变化和接触行为的描述。
点面接触通常涉及到接触状态的切换,如粘附、滑移、分离等。
在Abaqus中,可以通过定义不同的接触行为来描述不同的接触状态,以实现接触状态的切换。
此外,还需要考虑到接触面之间可能存在的不完全接触、过度接触等问题,并通过适当设置参数来解决这些问题,以确保模拟分析的准确性。
最后,在进行点面接触模拟时,需要进行合理的后处理与结果验证。
通过合理的后处理,可以分析并评估模拟结果,了解接触行为的演化过程和影响因素。
此外,还可以通过实验数据与模拟结果进行比较,验证模拟的准确性和可靠性。
通过不断优化和验证,可以提高模拟结果的准确性,为工程实践提供可靠的参考依据。
综上所述,点面接触在Abaqus模拟分析中具有重要的地位,需要特别注意一些关键的注意事项。
第15章 接触分析23
第15章接触问题分析15.1 接触问题概论接触问题存在以下两个较大的难点。
(1)在求解问题之前,不知道接触区域,表面之间的接触状态是未知的、突然变化的,这些随载荷、材料、边界条件和其他因素而定。
(2)大多数接触问题需要计算摩擦,有几种摩擦和模型可供挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
15.1.1接触问题分类接触问题分为两种基本类型:刚体-柔体的接触和柔体-柔体的接触。
在刚体-柔体的接触问题中,一个或多个接触面被当作刚体(与和它接触的变形体相比,有大得多的刚度)。
一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体-柔体的接触,许多金属成形问题归为此类接触。
另一类柔体-柔体的接触是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS支持三种接触方式:点-点接触、点-面接触、面-面接触,每种接触方式使用的接触单元适用于某类问题。
15.1.2接触单元为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用发生在一点上,那么模型的对应组元是一个节点。
如果相互作用发生在一个面上,模型的对应组元是单元,如梁单元、壳单元或实体单元。
有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元,在ANSYS中使用的接触单元详述如下。
1. 点-点接触单元点-点接触单元主要用于模拟点一点的接触行为。
为了使用点一点的接触单元,需要预先知道接触位置。
这类接触问题只能适用于接触面之间有较小相对滑动的情况(即使在几何非线性情况下)。
如果两个面上的节点一一对应,相对滑动可以忽略不计,两个面保持小量挠度(转动),那么可以用点-点接触单元来求解面-面接触问题,过盈装配问题就是一个典型的例子。
2. 点—面接触单元点—面接触单元主要用于给点—面接触行为建模,如两根梁的相互接触。
如果通过一组节点来定义接触面,生成多个接触单元,那么可以通过点-面接触单元来模拟面一面接触问题。
接触分析注意问题
接触分析注意问题1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。
如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。
2、接触对中的slave surface应该是材料较软,网格较细的面。
3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度“,此误差限度要大于接触面之间的距离,否则ABAQUS 会认为两个面没有接触:*Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding, adjust=0.2.4、定义tie时也应该设定类似的position tolerance:*Tie, name=ShaftBottom, adjust=yes, position tolerance=0.1 5、msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。
解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。
6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。
边界条件也是这样。
7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。
一般情况下不必设置此参数,如果在msg文件中看到opening 和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。
ANSYS接触分析

7、初始穿透
• 有几种技术可以模拟初始穿透接触问题(如过盈装配)。 可以使用初始几何穿透,或指定偏移量,或二者皆有。 • 指定偏移量(CNOF)
• 或在实常数中指定偏移量(CNOF)contact surface offset CNOF: 0.025
7、初始穿透
正的 CNOF 加大初始穿透 负的 CNOF 减小初始穿透或导致间隙 CNOF 可与几何穿透组合 自动 CNOF 调整 允许 ANSYS 基于初始穿透自动给定 CNOF 值。 导致 “刚好接触” 配置 ICONT 缺省为 0
7、初始穿透
• 如果模型包含初始几何穿透,接触力将立即“阶跃”到一个大值。 • -载荷突变经常导致收敛困难,期望有一种机制能够将初始穿透效应 渐变到零。 • Include with ramped effects 和 Include off set only w/ramp 选项通过在第一载荷步,将初始穿透渐变为零克服收敛困难。为求得 好的结果,在第一载荷步不应施加其它载荷 。
§2 接触单元
§2 接触单元
• 3. 点-点接触单元用于模拟单点和另一个确定点 之间的接触。 • 建立模型时必须事先知道确切的接触位置; • 多个点-点接触单元可以模拟两个具有多个单元 表面间的接触; • 每个表面的网格必须是相同的; • 相对滑动必须很小; • 只对小的转动响应有效。 • 例如: 点一点接触可以模拟一些面的接触。如地基 和土壤的接触
• 2、选取接触刚度的指导:
• Step 1. 开始采用较小的刚度值 • Step 2. 对前几个子步进行计算 • Step 3. 检查穿透量和每一个子步中的平衡迭代次数
•
• • •
在粗略的检查中,如以实际比例显示整个模型时就能观 察到穿透,则穿透可能太大了,需要提高刚度重新分析。 如果收敛的迭代次数过多(或未收敛),降低刚度重新 分析。 牢记:接触刚度是同时影响计算精度和收敛性的最重要 的参数。如果收敛有问题,减小刚度值,重新分析 在分析中减小刚度范围,直到结果(接触压力、最大 SEQV 等)不再明显改变。
abaqus点面接触注意事项
abaqus点面接触注意事项
abaqus是一款常用的有限元分析软件,用于模拟和分析工程结构的力学行为。
在abaqus中,点面接触是一种常见的边界条件,用于模拟两个物体之间的接触行为。
在进行abaqus点面接触时,有几个注意事项需要特别注意。
需要确保模型的几何形状和边界条件的设置是准确无误的。
模型的几何形状应符合实际情况,并且在模型中设置正确的接触面。
边界条件的设置应根据实际情况选择合适的参数,如接触刚度和摩擦系数等。
在进行点面接触时,需要注意模型的网格划分。
网格划分的精细度会影响到模拟结果的准确性和计算效率。
通常情况下,需要对接触区域进行较为细致的网格划分,以确保模拟结果的准确性。
还需要注意abaqus中点面接触的求解方法。
abaqus提供了多种求解方法来模拟点面接触,如基于位移法的接触算法和基于接触压力的接触算法等。
在选择求解方法时,需要根据具体问题的特点和求解效率进行合理选择。
在进行abaqus点面接触时,需要进行合理的后处理和结果分析。
通过分析接触区域的接触压力分布、接触面变形等参数,可以评估接触行为的性质和模型的稳定性。
在进行结果分析时,需要注意结果的可靠性和合理性,并结合实际情况进行进一步的讨论和判断。
abaqus点面接触是一项较为复杂的工作,需要在理论基础和实践经验的指导下进行。
通过合理的模型建立、网格划分、求解方法选择和结果分析,可以得到准确可靠的模拟结果,为工程设计和分析提供有力支持。
abaqus点面接触注意事项
abaqus点面接触注意事项全文共四篇示例,供读者参考第一篇示例:Abaqus是一款常用的有限元分析软件,广泛应用于工程界。
在使用Abaqus进行模拟分析时,点面接触是一个常见的情况。
点面接触涉及到两个不同几何体之间的相互作用,因此需要特别注意一些细节和注意事项。
在本文中,我们将针对Abaqus点面接触进行详细介绍和注意事项。
一、定义接触对在Abaqus中,定义接触对是点面接触分析的基本步骤。
接触对是模拟两个几何体之间的点面接触,确定哪些部分会发生接触。
在定义接触对时,需要设置接触对的属性,如摩擦系数、刚度等。
在设置摩擦系数时,需要根据具体情况进行合理的选择,以确保模拟结果的准确性。
二、设置接触参数在定义接触对后,需要设置接触参数,以确定两个几何体之间的接触行为。
在设置接触参数时,需要考虑到两个几何体的材料性质、几何形状等因素,以确保接触分析的准确性。
常用的接触参数包括接触刚度、深度控制等。
在设置接触参数时,需要进行多次实验和调试,以得到最优的模拟结果。
三、搭建模型在设置接触对和参数后,需要搭建模型进行模拟分析。
在搭建模型时,需要考虑到两个几何体之间的点面接触关系,以确保接触行为的准确模拟。
在搭建模型时,需要设置合理的网格划分和边界条件,以确保模拟结果的准确性。
四、模拟分析五、结果分析在模拟分析结束后,需要对结果进行分析。
在结果分析过程中,需要考虑到接触行为的情况,以及两个几何体之间的相互作用。
在结果分析时,需要与实际情况进行比对,以验证模拟结果的准确性。
在使用Abaqus进行点面接触分析时,需要注意一些细节和注意事项,以确保模拟结果的准确性。
希望本文能对大家有所帮助。
第二篇示例:Abaqus是一款广泛应用于工程领域的有限元分析软件,其点面接触功能在模拟接触问题时非常重要。
点面接触是指两个物体之间不完全接触,而是通过一个或多个点来进行接触。
在使用Abaqus进行点面接触分析时,需要注意一些关键因素,以确保模拟结果的准确性和稳定性。
接触问题分析-10
经典的接触问题求解方法(2/3)
定解条件:
四类接触状态,对应的定解条件为:
1)开式
Fal Fl Fbl Fbl 0
Байду номын сангаас
l x, y, z
2
引言(2/5)
研究内容:
接触模式问题:描述两接触体间的力的传递、描述不同载荷 下接触状态的变化;(解决如何描述的问题)
几何约束问题:表示接触面上两物体位移所要满足的条件; (解决到底以什么具体形式来描述、即怎样描述?)
摩擦定律问题:反映接触面上力与位移或压力与切向力之间 的关系;
求解方法问题:建立数学方程并加以求解。
6
经典的接触问题求解方法(1/3)
一般采用三个假设: 接触表面是凸的、连续的; 接触表面服从库仑摩擦定律; 接触模式是点-点接触模式。
z(法向)
A
y
B
x (切平面)
(a)
(b)
可能接触区
接触的A、B两物体
(a) 可能接触区;(b) 接触区局部坐标系
r表示接触点对间的间隙
2021/7/5
边界的接触状态(判定性条件) 分别为:
1 2
ij
ij
1 T
2
D
位移场中,真实解使得系统的总势 能取最小值。
find
min
ui (ui )
H
ui ui ui , on u
s.t.n 0
2021/7/5
12
数学规划方法求解接触问题(4/17)
接触问题的势能变分原理及其等价形式(续)
接触问题的有限元分析

U
1 2
λT
E
p
1
λ
6.1 接触边界的有限元算法
(2)接触约束算法
2) Lagrange 乘子法与增广Lagrange 乘子法
U
1 2
λT
E p
1
λ
min
U,
λ
1 2
UT
K
U
UT
F
g
U
T
λ
1 2
λT
Ep
λ
U
1 2
λT
Ep
1
λ
解收敛于
min U, λ 1 UT K UUT F g U T λ 解
虚力法:用沿边界的虚拟等效压力来模拟接触状态, 这样在每次迭代中并不重新形成刚度矩阵,所做的只是 回代工作。
有限元混合法:以结点位移和接触力为未知量,并 采用有限元形函数插值,将接触区域的位移约束条件和 接触力约束条件均反映到刚度矩阵中去,构成有限元混 合法控制方程
6.1 接触边界的有限元算法
(1)直接迭代法
惩罚函数法对接触约束条件的处理是通过在势能泛函中
增加一个惩罚势能。
p
U
1 2
P T
EP
P
惩罚因子
嵌入深度,是节点位移的函数
接触问题就等价于无约束优化问题:
min U U p U
K K U FF
p
p
6.1 接触边界的有限元算法
(2)接触约束算法
1)罚函数方法
K K U FF
p
6.1 接触边界的有限元算法
(2)接触约束算法 2) Lagrange 乘子法与增广Lagrange 乘子法
min U, λ 1 UT K UUT F g U T λ
有限元基础理论课件第7章接触分析
TARGE169 - 2-D Target Segment TARGE170 - 3-D Target Segment
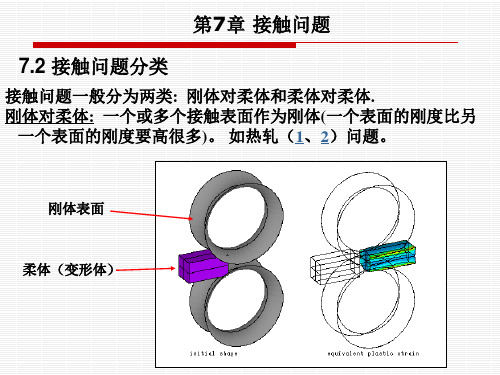
第7章 接触问题
7.4 接触分析步骤
只有面-面接触单元上能提取接触应力 接触面一般是柔性面(刚度较低的面),目标面一般是刚 度较大。接触面和目标面合称“接触对”,通过相同的单 元实常数来识别和定义“接触对”。
面-面 :接触区域未知, 并且允许大滑动,能提取接触应力(常用)
CONTA17urface Contact CONTA172 - 2-D 3-Node Surface-to-Surface Contact CONTA173 - 3-D 4-Node Surface-to-Surface Contact CONTA174 - 3-D 8-Node Surface-to-Surface Contact
第7章 接触问题
7.3 接触单元(conta)与目标单元(targe)
接触单元: 节点-节点 : 接触的最终位置事先是知道的,不能提取接触应力.
CONTAC12 - 2-D Point-to-Point Contact CONTAC52 - 3-D Point-to-Point Contact CONTA178 - 3-D Node-to-Node Contact
面-面(柔-柔)接触分析步骤:
➢建立模型,划分网格(全部划分); ➢定义刚性目标面(也变形,只不过刚度较大或形状简单点); ✓定义柔性接触面; ✓设置接触单元的实常数; ✓设置边界条件; ✓设置求解选项和载荷步(非必须); ✓求解; ✓查看结果。
柔-柔接触分析例题与步骤
(1)面-面(刚-柔)接触分析步骤:
✓建立模型,将柔体划分网格(刚体不划分); ✓定义刚性目标面(可同时定义pilot); ✓定义柔性接触面; ✓设置接触单元的实常数; ✓设置边界条件; ✓设置求解选项和载荷步(非必须); ✓求解; ✓查看结果。
ansys技巧总结_利用LS-DYNA进行接触分析应该注意的一些问题

确保模型中使用的材料数据是精确的。大多数非线性动力学问题的精度取决于输入材料数据的质量。多花点时间以得到精确的材料数据。
对所给模型选择最合适的材料模型。如果不能确定某个part的物理响应是否应该包含某个特殊特性 (例如:应变率效应),定义一种包含所有可能特点的材料模型总是最好的。
对准静态问题, 施加一个高于真实情况的速度常常是有利的,这能极大的缩减问题的求解时间。
不允许约束刚体上的节点,所有的约束必须加在刚体的质心 (通过 EDMP,RIGID 命令)。
在两个接触面之间不允许有初始接触,确保在ห้องสมุดไป่ตู้义接触的地方模型没有任何重叠。
总是使用真实的材料特性和壳厚度值,接触面的材料特性和几何形状被用来决定罚刚度。
在相同的part之间不要定义多重接触。
对壳单元,除非需要接触力否则使用自动接触。
无论何时尽可能使用自动单面接触 (ASSC),此接触是最容易定义的接触类型而不花费过多的CPU 时间。
在求解之前列示所定义的接触面以保证定义了合适的接触。
避免单点载荷,它们容易引起沙漏模式。 既然沙漏单元会将沙漏模式传给相邻的单元,应尽可能避免使用点载荷。
在定义载荷曲线之后,使用EDLDPLOT 命令进行图形显示以确保其精确性.
因为LS-DYNA 可能会多算几个微秒,将载荷扩展至超过最后的求解时间(终止时间)常常是有用的。
接触分析模块:概念1主面和从面
接触分析模块:概念1主面和从面
ABAQUS/Standard接触分析中的接触对由主面(master surface)和从面(slave surface)构成。
在模拟过程中,接触方向总是主面的法线方向,从面上的节点不会穿越到主面,但主面上的节点可以穿越从面。
定义主面和从面时要注意以下问题:
1、应选择刚度大的面作为主面。
这里所说的刚度,不仅要考虑材料本身的特性,还要考虑结构的刚度。
解析面(analytical surface)或由刚性单元构成的面必须作为主面,从面则必须是柔体上的面(可以是施加了刚性约束的柔体)。
2、如果两个接触面的刚度相似,则应选择网格较为粗的面作为主面。
3、两个面的节点位置不要求是一一对应的,但如果能够一一对应,可以得到更精确的结果。
4、主面不能是由节点构成的面,并且必须是连续的。
如果是有限滑移(finite sliding),主面在发生接触的部位必须是光滑的,不能有尖角。
5、如果接触面在发生接触的部位有很大的凹角或者尖角,应该将其分别定义为两个面。
6、如果是有限滑移,则在整个分析过程中,都尽量不要让从面节点落到主面之外,尤其是不要落到主面的背后,否则容易出现收敛问题。
7、一对接触面的法线方向应该相反,换言之,如果主面和从而在几何位置上没有发生重叠,则一个面的法线应该指向另一个所在的那
一侧,对于三维实体,法线应该指向实体的外侧。
如果法线方向错误,ABAQUS往往会将其理解为具有很大过盈量的过盈接触,因而无法达到收敛。
关于HYPERMESH中做接触需要注意的一些问题
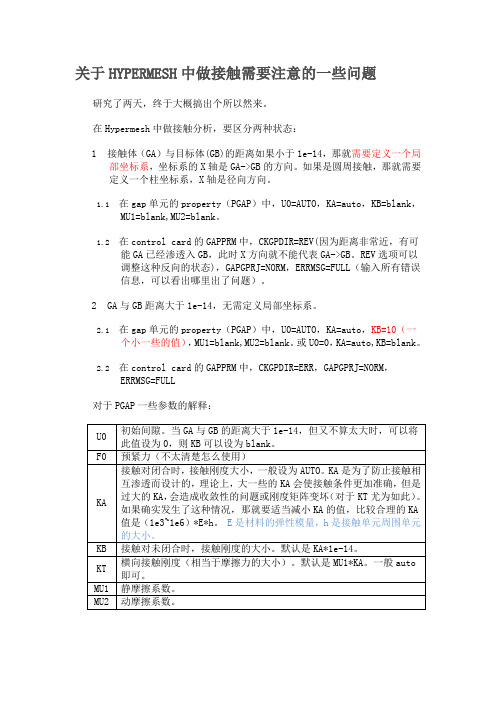
关于HYPERMESH中做接触需要注意的一些问题研究了两天,终于大概搞出个所以然来。
在Hypermesh中做接触分析,要区分两种状态:
1接触体(GA)与目标体(GB)的距离如果小于1e-14,那就需要定义一个局部坐标系,坐标系的X轴是GA->GB的方向。
如果是圆周接触,那就需要
定义一个柱坐标系,X轴是径向方向。
1.1在gap单元的property(PGAP)中,U0=AUTO,KA=auto,KB=blank,
MU1=blank,MU2=blank。
1.2在control card的GAPPRM中,CKGPDIR=REV(因为距离非常近,有可
能GA已经渗透入GB,此时X方向就不能代表GA->GB。
REV选项可以
调整这种反向的状态),GAPGPRJ=NORM,ERRMSG=FULL(输入所有错误
信息,可以看出哪里出了问题)。
2GA与GB距离大于1e-14,无需定义局部坐标系。
2.1在gap单元的property(PGAP)中,U0=AUTO,KA=auto,KB=10(一
个小一些的值),MU1=blank,MU2=blank。
或U0=0,KA=auto,KB=blank。
2.2在control card的GAPPRM中,CKGPDIR=ERR,GAPGPRJ=NORM,
ERRMSG=FULL
对于PGAP一些参数的解释:
如果要设置非滑移表面,则可以在control card中,设置PARAM,GAPOFFSET = NO。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是
你收敛问题的主要原因。
如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。
2、接触对中的slave surface应该是材料较软,网格较细的面。
3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误
差限度“,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接触:*Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding, adjust=0.2.
4、定义tie时也应该设定类似的position tolerance:
*Tie, name=ShaftBottom, adjust=yes, position tolerance=0.1 5、 msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。
解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。
6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。
边界条件也是这样。
7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意
思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是
12)。
一般情况下不必设置此参数,如果在msg文件中看到opening 和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。
8、桩头掉在了地表下,说明接触定义得不正确。
可能接触面的距离还是大于*contact pair 中的adjust=0.02, 可改为adjust=0.2 9、原则上,90度的圆弧应该划分10个单元,适当少一些可能也行。
*contact pair中的adjust=0.005,还是太小,在后处理时可以看到,接触面之间的距离大于0.005。
把adjust设置大一些没关系,比如adjust=0.1。
10、网格不好也可能产生过约束问题,不要只考虑边界条件啊!NUMERICAL SINGULARITY WHEN PROCESSING NODE 15294 D.O.F. 2 RATIO =2.48305E+11", 说明NODE 15294 所在的实体在方向2上出现无限大的刚体位移。
可以在此实体上的任意一点和地面之间定义一个很软的弹簧,以消除刚体位移。
方法是:interaction模块,菜单special / springs-dashpots / create, 选connect points to ground, 选节点,Degree of freedom 设为出现了刚体位移的自由度,spring stiffness为一个较小的值(太小则不足以消除刚体位移,太大则会影响变形如果多个方向上出现了刚体位移,就要分别在相应的方向上各定义一个弹簧。
spring 所在的节点在弹簧方向的位移乘以spring stiffness,就是弹簧所分担的载荷,它应该远远小于在
此方向上的外载荷。
如果模型位移很小,我常常把spring stiffness 设为1.
11、ABAQUS/Standard中对于主从面选择的硬性规定:
解析刚性面必须是主面
节点面(node-based surface)只能是从面,也只能用在点面接触中
从面必须位于可变形体上或者可变形的刚体上
主面和从面都不能纯粹的刚性面,除非刚性面可变形
12、一般性要求
主从面的选择对于点面接触非常重要,对于同等网格密度的面面接触也非常重要,总的来说在点面接触中要更加慎重,影响更大。
(1)小面为从面;
(2)相同刚度(不要仅从弹性模量角度,要从刚度角度,比如大E 的壳比小E的块要软)的选择单元粗的作为主面;
(3)刚度和网格密度都差不多,面对选择不太明确。
主从面的选择对结果的影响,点面接触大于面面接触;但是如果两个面对网格一样粗,面的选择对面面接触影响较大(如果从面比主面粗,计算量非常大)结论:尽量保证主面a刚度大,b网格粗,c面积大,如果这三个因素之间有矛盾,比如刚度与面积之间有冲突,优先大刚度,刚度与网格粗有矛盾优先大刚度,粗网格、面积小时,把该面选作从面,这样的计算量只与从面片的个数成正比,计算量小。
总之,a刚度大,其次b网格粗,再次保证c面积大。
13、面面接触对:不要群对群,而要面对面
在abaqus中,接触对一定要逐个逐个地建立,而不要一群一群地建立接触对,比如模型中存在5处接触,则应该建立五个master-slave 接触对,而不应该将5处master面建立成一个主面,5处slave面建立一个从面,这样做的话几乎不能收敛,这一点在接触较多的实例中特别重要。
14、了解Discretization method: surface-to-surface
node-to-surface 这一点也非常重要,不同的离散方法各有优缺点,他们的比较如下:这里所说的点面接触、面面接触主要是指在abaqus 中Discretization method:surface-to-surface node-to-surface 两种方式。
通常,每次迭代中,接触的计算量与接触中产生的约束方程的数目成正比,也和每个方程中包含的节点的个数成正比。
一般说来,接触计算的一次迭代计算量,点面点面接触计算量<面面接触,但很多情况下,点面接触要达到收敛需要的迭代次数要大于面面接触,但不同的分析这种情况也有差异。
每次迭代中,具体来说:
点面接触:约束方程的个数与从节点个数成正比,每个方程中包含1个从节点和多个附近的主节点。
面面接触:约束方程的个数与tracking approach有关:
在有限滑移分析中,可能的约束方程的数目正比于从面片个数,比从节点的个数要多,约束方程存在于从面内,而不是从节点上,每个方程需要多个主从节点(从面的网格越细,计算量越大);
在小滑移分析中,可能的约束方程的数目正比于从节点的个数,
每个方程需要1个从节点和多个附近的主节点(对于点面接触也是),也要考虑从节点周围的面,所以一个方程中的主节点个数比小滑移的点面接触要多(从面的网格越细,从节点个数越多,计算量越大)。
15、合理确定主从面并考虑网格影响
记住一条:主面尽量保证刚硬,尽量保证网格较粗。
16、摩擦力的调整比较重要。
(太小不易收敛) 很多情况下需要通过
摩擦力来消除刚体位移,这是摩擦系数如果设的太小的话会出现不收敛的情况,这是可以适当增加摩擦系数。
17、简化模型,效果奇特。
(删除不必要的细节) 千里之堤毁于蚁穴。
模型中不必要的细节有时对于总体网格质量有较大影响,为何不舍小取大删除这些细节,不要为不必要的细节降低了整体网格和计算质量。