爬楼车毕业设计说明书
本科毕业设计__全方位移动爬楼梯机器人小车的研究开题报告

分类号________密级________UDC________编号________江西理工大学开题报告论文题名全方位移动爬楼梯机器人小车的研究申请学位级别___工学硕士____专业名称机械电子工程__毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日指导教师评阅书评阅教师评阅书教研室(或答辩小组)及教学系意见目录一、课题意义 (2)(一)具有越障功能移动机器人的简介 (2)(二) 具有越障功能机器人研究的文献综述 (4)二、课题方案 (8)(一)课题研究的主要内容 (8)(二)研究目标及创新 (10)三、可行性分析 (10)四、课题进度安排 (12)五、参考文献 (12)一、课题意义(一)具有越障功能移动机器人的简介机器人作为一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
便捷式履带爬楼推车设计
便捷式履带爬楼推车设计目录一、前言 (3)1. 产品概述 (3)2. 设计目标 (4)3. 创新点 (4)二、产品功能与特点 (6)1. 履带驱动系统 (7)1.1 行走稳定性 (8)1.2 坡度适应性 (9)2. 推运平台设计 (10)2.1 承载能力 (11)2.2 稳定性 (12)2.3 安全防护 (13)3. 操作便捷性 (14)3.2 可折叠性 (16)3.3 轻便性 (17)4. 其他功能 (18)三、结构设计 (19)1. 整体框架结构 (20)2. 履带系统 (21)2.1 履带配置 (22)2.2 驱动机制 (23)2.3 润滑方式 (24)3. 推运平台 (25)3.1 平台材质 (26)3.2 平台尺寸 (27)3.3 安全卡扣装置 (28)4. 控制系统 (29)4.2 电路原理与连接 (31)4.3 人机交互设计 (33)四、安全性能 (34)1. 稳定性分析 (35)2. 行驶安全性测试 (36)3. 防护措施 (37)3.1 过载保护 (38)3.2 停稳机制 (39)五、生产工艺 (40)1. 材料加工方案 (42)2. 组装工艺流程 (43)3. 质量控制 (45)六、应用场景 (45)1. 建筑施工 (46)2. 物流运输 (47)3. 其他领域 (48)七、未来展望 (49)一、前言随着现代社会的发展和科技的进步,人们的生活节奏越来越快,对于各种生活用品的需求也越来越多样化。
在这个背景下,便捷式履带爬楼推车应运而生,它以其独特的设计和优越的功能,为人们的日常生活带来了极大的便利。
本文档将详细介绍便捷式履带爬楼推车的设计原理、结构特点、功能模块以及应用场景等方面的内容,旨在为广大消费者提供一个全面了解和选购便捷式履带爬楼推车的参考依据。
1. 产品概述本文档旨在介绍一款创新的“便捷式履带爬楼推车设计”。
该产品是为那些需要经常搬运重物或笨重家具,尤其是楼层间搬运而设计的。
多功能推车梯子毕业设计
多功能推车梯子毕业设计This design is a nal ___ a regular ladder。
handcart。
flatbed truck。
___。
It also has a unique climbing step n。
___ concepts。
___。
___ during the design process。
The design process mainly relied on computer drawing。
using a large number of nal imagesto analyze and explain the design and model of each structure in a vivid manner。
This article will analyze the entire design process。
and provide a detailed n of the n and design process of each part。
___ designing for the public。
and ___ design process。
while also ___ product.Keywords: nal product design1.1 研究背景本文旨在设计一款多功能梯子,解决多功能产品在使用过程中常见的问题,如功能之间相互影响、成本浪费和功能浪费等。
同时,本文也将探讨人性化设计方法,包括设计思维、功能规划、造型语意、材料选择、色彩运用和操作界面等,以提高产品的用户体验和市场竞争力。
1.2 研究目的及意义通过本文的研究,旨在设计一款多功能梯子,满足用户在不同场景下的使用需求,提高产品的实用性和市场竞争力。
同时,也希望通过探讨人性化设计方法,提高产品的用户体验,促进产品的可持续发展。
1.3 设计理念本文的设计理念是“多功能、人性化、安全可靠、可持续发展”。
液压爬楼梯小车毕业设计

液压爬楼梯小车毕业设计
液压爬楼梯小车是一种能够利用液压系统进行爬楼梯运输的小型载货工具。
其主要构
成部分包括底盘、电动机、液压系统、控制系统等。
在运作时,该车首先通过底盘上的轮
子对平地进行移动。
当遇到楼梯等高度障碍,车上液压系统会启动,通过执行器推动液压缸,使其较长的活塞杆在进出液压缸的过程中将车体升高,从而攀爬楼梯。
该车的设计有力地解决了搬运物品时遭遇障碍的问题,极大地提高了物流工作的效
率。
在设计中应注意以下几点:
1. 结构设计
车体应该结构简单,轻量化,符合设计要求。
液压缸和液压泵应具有足够的承载能力
和精度。
底盘应选择高强度材料,以达到足够的强度和稳定性。
2. 液压系统设计
为了保证车体在爬行过程中的稳定性,应设计能够自动进行液压系统调节的控制程序。
液压油舱应具有足够的容量,并严格按照操作手册进行维护和更换。
液压泵应该能够提供
足够的流量和压力保证液压缸的正常运作。
该车的液压系统应根据实际使用情况进行合理
的尺寸配置及管路安装。
3. 电动机设计
电动机应具有足够的功率和扭矩保证车辆顺畅运行和爬,同时也要考虑高温、潮湿等
工作条件,选用符合要求的电机。
控制系统设计应该具有足够的精确性和可靠性,能够自动启动和停止,同时还应该具
有检测、报警等功能。
对于该车,建议采用PLC编程控制方式,以便实现适应性操作。
总之,液压爬楼梯小车的设计涉及到诸多方面,并需要充分考虑使用的环境、工作量、工作时长等实际情况,方能达到设计的预期效果。
多功能推车梯子毕业设计

优秀设计摘要本设计是一种多功能推车梯子,综合了普通梯子、手推车、平板车、铲车的功能,将此四项功能融合为一体,并拥有独特的攀爬台阶功能,很好的解决了目前人们日常生活中对于搬运货物中经常遇到的问题。
设计中融入了人性化、实用性设计理念,在多功能基础上进行创新设计,通过严格的材料选择和力学分析进行设计。
本设计过程主要依靠电脑绘图,利用大量三维图片将每个结构的设计和模型以图文并茂形式进行了详细的分析和阐述。
本文将分析设计的整个过程,以及每个零件的制作和设计过程进行了详尽的描述,充分体现了针对大众进行设计的方向,将人性化设计贯穿整个设计的始终,在开发多功能的同时也提高了产品的实用性。
关键词:产品多功能设计AbstractThis design is a multi-purpose ladder cart, a comprehensive general ladder, trolleys, Ping Banche, lift truck features, this one for the four functions of integration and unique features climbing stage, a very good solution of the current daily life In the handling of the goods in the often encountered problems. Integrated into the design of humanity, practical design, multi-function on the basis of innovative design, a rigorous analysis of material selection and mechanical design. The design process relied mainly on computer graphics, use of large three-dimensional image of each design and structure of the model illustrated in the form of a detailed analysis and elaboration. This paper will analyse the whole process of design, and every part of the design and production process of a detailed description, fully embodies the general public for the design direction, humanity will run through the entire design has always been designed, in the development of multi-function while Enhance the usefulness of the product.Key words: product-design目录1 绪论 (1)1.1 研究背景 (1)1.2 研究目的及意义 (1)1.3 设计理念 (2)1.4 前期准备 (2)2 前期总体结构分析设计 (4)2.1多功能产品设计中的常见问题 (4)2.1.1 多功能产品使用过程中,功能之间相互影响 (4)2.1.2 多功能造成成本的浪费 (4)2.1.3 多功能造成功能浪费 (4)2.2 产品的人性化设计方法 (4)2.2.1 设计思维 (5)2.2.2 功能规划 (5)2.2.3 造型语意 (5)2.2.4 材料选择 (6)2.2.5 色彩运用 (6)2.2.6 操作界面 (6)2.3 梯子形态下的人体舒适度及安全总体分析设计 (6)2.3.1 上下梯子所需时间 (7)2.3.2 三点接触比例 (7)2.3.3 梯子架材料的选用 (9)2.3.4 梯子踏板结构设计 (10)2.3.5 台阶安全措施 (11)2.3.6 台阶的材料 (13)2.4:推车部分的设计 (15)2.4.1 三种推车示意图 (15)2.4.2 转向问题 (16)2.4.3 锁轮功能 (17)2.5 爬台阶部分设计 (19)2.5.1 星轮的选择 (19)2.5.2 爬台阶功能的实现 (20)2.5.3 三星轮安装位置问题 (21)3 具体结构分析设计 (22)3.1 梯子部分: (22)3.1.1 梯子双杆结构的固定及受力分析 (22)3.1.1.1 前杆部分 (22)3.1.1.2 后杆部分 (22)3.1.1.3 连接器1的设计 (24)3.1.1.4 前杆、后杆、连接器的组合结构 (24)3.1.1.5 受力分析 (25)3.1.2 三个台阶的设计 (25)3.1.3 三个台阶在双杆间的连接 (27)3.2 铲车部分 (29)3.3 平板车和推车部分: (31)3.4 爬台阶功能结构部分 (33)3.4.1 三星轮的结构 (33)3.4.2 三星轮的安装 (34)4 种形态的实现 (36)4.1 梯子形态 (36)4.2平板车形态 (36)4.3手推车形态 (37)4.4铲车形态 (37)4.5攀爬台阶功能 (37)结论 (38)致谢 (39)参考资料 (40)1绪论1.1 研究背景目前,很多功能单一的常规产品已经不能再满足人们生活多元化需要,功能单一的产品由于其功能的局限性,让人们为了需要不得不购买很多此类产品,浪费金钱、占用空间、使用不方便,给人们的生产、生活带来了很多不便。
爬楼轮椅设计说明书
毕业设计说明书(论文)论文题目:爬楼轮椅设计系部:机械制造系专业:机械设计与制造班级:11级机械一班学生姓名:学号:指导教师:2013年12月26日目录摘要 (I)Abstract (II)绪论.......................................................................................................错误!未定义书签。
第1章原理图分析...............................................................................错误!未定义书签。
第2章轮椅简介...................................................................................错误!未定义书签。
第3章传动机构的设计.......................................................................错误!未定义书签。
3.1拟定传动方案的任务.........................................................................错误!未定义书签。
3.2选择传动机构类型............................................................................错误!未定义书签。
3.3选择电动机.....................................................................................错误!未定义书签。
3.4传动装置总传动比和分配各级传动比............................................错误!未定义书签。
爬楼车毕业设计论文

爬楼车毕业设计论文在大学生活中,毕业设计是每个学生都要面对的一道坎。
对于我来说,我选择了一个有趣而又具有挑战性的主题——爬楼车。
这个主题不仅与我的专业相关,还可以让我探索新的技术和创新思维。
在这篇文章中,我将分享我在爬楼车毕业设计论文中的一些心得和经验。
首先,我想解释一下什么是爬楼车。
爬楼车是一种能够爬上楼梯的机器人,它可以帮助人们搬运重物或者在没有电梯的地方上下楼。
这个主题的选择源于我对机器人技术的兴趣,同时也考虑到了现实生活中的需求。
在我的毕业设计中,我首先进行了相关的文献研究和市场调查。
通过阅读大量的论文和文章,我了解到爬楼车的设计需要考虑到多个因素,包括机器人的稳定性、移动性以及搬运能力等。
同时,我还调查了市场上已有的爬楼车产品,以了解他们的设计理念和技术特点。
接下来,我开始进行爬楼车的设计与制作。
在设计阶段,我采用了CAD软件进行三维建模,以便更好地展示我的设计想法。
我将机器人的主体部分设计为一个稳定的底座,上面安装有多个电动脚轮,以实现爬楼梯的功能。
此外,我还加入了一些传感器和控制模块,以提高机器人的智能化水平。
在制作阶段,我遇到了一些挑战。
首先是材料的选择,我选择了轻量化的材料,以确保机器人的移动性能。
其次是电路的设计和组装,我需要确保电路板的稳定性和可靠性。
最后是程序的编写,我使用了C++语言和Arduino开发板,以实现机器人的自主导航和运动控制。
经过几个月的努力,我成功地完成了我的爬楼车毕业设计。
在展示和答辩中,我的设计得到了导师和同学们的认可和赞赏。
他们对我的创新思维和技术实现表示了肯定,并提出了一些建设性的意见和建议。
通过这个毕业设计的过程,我不仅学到了很多专业知识和技能,还培养了解决问题和团队合作的能力。
我学会了如何进行科学研究和实验,如何分析和解决实际问题。
同时,我也深刻体会到了创新的重要性和挑战。
未来,我希望能够继续深入研究和开发爬楼车技术,将其应用于实际生活中。
我相信,随着科技的不断进步和创新的不断涌现,爬楼车将成为人们生活中不可或缺的一部分。
自动爬楼小车毕业论文

自动爬楼小车毕业论文自动爬楼小车毕业论文摘要:自动爬楼小车是一种能够自主进行楼梯上下行的机器人,具有广泛的应用前景。
本文主要研究了自动爬楼小车的工作原理、设计方案及其控制算法。
通过对其机械结构、传感器系统、动力系统和控制系统的优化设计,实现了安全、稳定、高效的自动爬楼过程。
通过实验验证了该小车的性能优势,并对未来的研究方向进行了展望。
关键词:自动爬楼小车;楼梯爬升;机械结构;控制算法;性能优化引言:随着科技的不断发展,机器人技术在多个领域都取得了巨大的进步,自动爬楼小车作为其中的一个重要创新,具有重要的应用价值。
传统的楼梯爬升方式往往需要人力操作,效率低且存在安全隐患,而自动爬楼小车能够通过自主导航和控制算法,实现自动爬升过程,具有显著的应用潜力。
因此,对自动爬楼小车的研究与开发具有重要的意义。
一、自动爬楼小车的工作原理自动爬楼小车主要由机械结构、传感器系统、动力系统和控制系统组成。
其工作原理是通过传感器系统感知楼梯的形状和距离,并通过控制系统计算最佳行进策略,再由动力系统驱动机械结构完成楼梯爬升过程。
二、自动爬楼小车的设计方案2.1 机械结构设计机械结构设计是自动爬楼小车的关键部分,它需要具备足够的稳定性和承重能力。
通过采用铝合金材料和模块化设计,提高了机械结构的强度和稳定性。
同时,为了适应不同楼梯的形状和高度,机械结构设计了可调节的抓握装置和脚踏装置。
2.2 传感器系统设计传感器系统是自动爬楼小车的感知器官,它需要准确地感知楼梯的形状和距离。
通过采用多种传感器,如红外传感器、超声波传感器和视觉传感器,实现了对楼梯的全方位感知。
2.3 动力系统设计动力系统是自动爬楼小车的动力来源,它需要提供足够的动力输出,使得小车能够稳定爬升楼梯。
通过采用直流电机和齿轮传动机构,提高了动力系统的效率和可靠性。
2.4 控制系统设计控制系统是自动爬楼小车的大脑,它需要准确地控制机械结构和动力系统,实现自动爬升的目标。
履带-轮式爬楼梯电动轮椅设计【带图纸】
履带-轮式爬楼梯电动轮椅设计【带图纸】毕业设计说明书论文 QQ 36296518 原创通过答辩履带,轮式爬楼梯电动轮椅设计摘要随着社会的发展和人类文明程度的进步,老年人与残障人员愈来愈需要运用现代高新技术来改善他们的生活质量,而爬楼梯对于老年人和残疾人行动不方便的,非常困难,所以要增加轮椅自动化程度,于是我们在原轮椅的基础上进行改进和加装爬楼机构,本文设计的电动轮椅具有爬楼功能,爬楼时用履带驱动,平地时可像普通轮椅用轮驱动也可轮椅稍后仰用履带驱动。
此车在轮椅的基础上安装履带装置、升降机构、电机、以及控制电路、控制设备,以降低劳动强度、提高效率,减少他们的困难、提高生活质量、满足市场需求为目的。
爬楼梯车具有适应性强、机动灵活、活动范围大等特点,在我国国民经济的发展中,爬楼梯电动轮椅的需求量逐年增加,市场发展潜力巨大,爬楼梯电动轮椅行业具有广阔的发展机遇和良好的投产前景。
关键词:爬楼梯,电动,轮椅,履带轮式 I 履带,轮式爬楼梯电动轮椅设计Abstract With the social development and improvement in the level of human civilization,oldmen and physically disabled members of society more and more need to usemodern high-tech to improve their quality of life,but the elderlyand handicapped areunable to climb the stairs, so we had to increase the automaticlevel of the electricwheelchair to reduce their difficulty. So we have the original onthe basis o f awheelchair to improve and the installatio n of Climbing stairs institutions, the paperdesign with the electric wheelchair has Climbing stairs function, when Climbing stairsit use track-driven, the ground can be used like an ordinary wheelchair-wheel-drivecan also be track-driven, when the chair be tilted.we have fit inthe new equipmentsinclude the tracked device,the body movements, the electromotor, control circuit andcontrol equipment, etc, to reduce the labor intensity and difficulty, and to improve theefficiency and living quantity, so that can satisfy the requirements of the market. Theautomatic electric wheelchair has new characteristics of high adaptability, mobilityand orbit, etc. As the development of the national economy, the requirement ofautomatic electric wheelchair will be increased year by year. So the developingpotential of the automatic electric wheelchair in the market is vast, it has a gooddeveloping opportunity and well invested prospect. Keywords:Climbing thestairs,electricity, wheelchair, Track-Wheel 履带,轮式爬楼梯电动轮椅设计目录第一章综述.................................................................. .. (1)1.1 爬楼梯轮椅的意义 (1)1.2 国内外爬楼梯轮椅的发展状况 ....................................21.2.1 国外爬楼梯轮椅的发展状况 (2)1.2.2 国内爬楼梯轮椅的发展状况 (4)1.3 本项目的设计目的与主要研究内容 ................................51.3.1 课程设计目的 (5)1.3.2 课题研究内容 (6)1.4 设计进程安排 ..................................................6第二章履带爬楼装置机械系统结构设计 (8)2.1 爬楼机构的比较 ................................................82.2 设计思路 ......................................................9......................................... 10 2.3 履带轮式轮椅爬楼原理2.4 履带爬楼过程分析 .............................................112.5 爬楼性能参数 .................................................132.6 履带爬楼机构的结构设计 .......................................132.7 升降机构的设计 (16)2.8 本章小结 (18)第三章电气系统设计 ................................................................. ............ (19)3.1 履带爬楼梯装置执行电机选择 (19)3.2 电池选择 (20)3.3 电动车电机转速控制 (21)3.3.1 驱动方式对电动车性能影响 (21)3.3.2 现有电动车电机存在主要问题及探索 ...........................213.4 直流电机机械特性 (22)3.5 控制系统的设计 (23)3.6 本章小结 (28)第四章典型零部件设计及校核计算 (29)4.1 传动系统动力参数计算 (29)4.2 轴的计算 (30)III 履带,轮式爬楼梯电动轮椅设计第五章技术经济分析报告 ................................................................. . (39)5.1 履带轮式轮椅技术分析 (39)5.2 履带轮式轮椅经济分析 (39)5.3 履带轮式轮椅结论和展望 (40)参考文献 ................................................................. (41)致谢 ................................................................. ............................................ 42 IV 履带,轮式爬楼梯电动轮椅设计第一章综述 1.1 爬楼梯轮椅的意义轮椅是年老体弱者以及下肢伤残者必不可少的代步工具,随着无障碍设施的增多,轮椅使用者的活动范围逐步加大,但楼梯却使轮椅受到很大限制,因此研发价格低廉、简单易用的爬楼梯轮椅是康复工程工作者面临的一项比较紧迫的任务。
爬楼车毕业设计说明书

前言近年来随着计算机技术蓬勃发展,计算和数据传送速度大幅度提高。
以此硬件为基础,许多智能算法得以在短时间内实现,智能机器人正变得越来越聪明。
随着现实生活中对机器人技术应用的发展,使得机器人成为战胜自然和虚拟障碍的必需品。
在很多危险场所,如战场、核生化灾害地、恐怖爆炸地等需要愈来愈多的移动机器人搭载机械手等设备代替人去执行任务。
众所周知机器人自主爬楼梯是移动机器人完成危险环境探查、侦察、救灾等任务需要具备的基本智能行为之一。
目前,主要有腿式、履带式、轮式爬楼车移动机器人,腿式的如四足和六足机器人,尽管这些机器人能够爬楼梯和穿越障碍,但由于腿部的运动,它们不能在平坦的表面上平滑运动;履带式移动机器人以其强大的地形适应性而倍受青睐,其所受的摩擦力均匀分布在履带上,而轮式小车的摩擦力只是集中在轮胎与地面的接触面上,就抓地力而言它们是一样的,但在小车转弯或者爬坡时,履带式小车所受的摩擦力分布不会像轮式小车那样发生剧变,所以就表现出更好的操控性,但是转弯时,履带的磨损、履带开模难度大等都成为其应用的瓶颈;轮式移动机器人克服了履带式的这些缺点,在满足一定地形适应性的前提下,可以充分发挥移动机器人移动灵活、控制简单等优点。
一般来说,轮式移动机器人对地形的适应性大小与轮子的数量成正比,但随着轮子数量的增加,又带来了机器人体积庞大、重量重等缺点。
爬楼轮式行驶系统均采用各轮独立驱动,自主工作的方式,同时各轮均采用弹性悬挂方式,故工作起来方便灵巧,同心性和转向性均较好。
刚性轮具有较高的机械可靠性,较好的转向性和环境适应性,但其行驶稳定性和耐磨损性均较差。
充气轮虽然具有较好的行驶稳定性和越障能力,但其环境适应能力差,故不能应用到爬楼车中。
金属弹性轮的爬坡性能、耐磨损性、环境适应性以及机械可靠性、越障能力均较好,但其转向性能较差。
椭圆轮、半球轮和无毂轮的爬坡和越障性能及耐磨损性能均较好,但其行驶稳定性较差,机械可靠性最低。
机械毕业设计(论文)开题报告-爬楼梯的自行轮椅车设计
资料毕业设计(论文)开题报告题目爬楼梯的自行轮椅车设计专班学业级生名称机械设计制造及其自动化学号姓名指导教师填表日期2012 年 3 月14 日一、选题的依据及意义:轮椅是年老体弱者以及下肢伤残者必不可少的代步工具,随着无障碍设施的增多,轮椅使用者的活动范围逐步加大,但楼梯却使轮椅受到很大限制。
目前的轮椅、电动轮椅能在坡度小于 12度平坦的路面上行驶,但遇到楼梯台阶、沟槽、坎就无法跨越。
当然随着我国城市化进程的不断加快,各类无障碍设施不断出现,以及重要的公共场合都会有特殊通道以供他们使用,这是时代的潮流,是社会进步的标志,更是人类文明不断发展的结果。
但由于我国无障碍设施建设的滞后,很多地方都还没有无障碍设施,使他们的日常出行与生活造成相当大的不便,鉴于楼梯、台阶是最常见的障碍,研究爬楼梯的轮椅车能给由于生理机能变化的老年人,先天或意外致残等行动不方便人士提供一种能方便自我、操作方便、使用安全的、能将代步、跨越沟、坎、台阶与楼层(楼梯)融为一体的工具。
解决他们在康复前的生活、学习、工作、交流等实际困难,减少他们由于自身身体缺陷而造成的不便。
二、国内外研究概况及发展趋势:1 爬楼梯轮椅车的国内外现状国外对爬楼梯的轮椅车产品较多如是德国 PER F EKTA公司的产品。
其为履带式传动,采用12V-15Ah的蓄电池、12V/170W的直流电机,自重42kg,,可爬楼梯的最大坡度为35度。
这种轮椅车除了可以单独使用外,还可以作为普通轮椅的搬运工具,直接把轮椅放在上面上下楼梯,因此作为车站、机场等处移动轮椅乘客的专用工具比较方便。
而且,熟练操纵者能够自行乘坐轮椅上下楼梯。
在平地能自由移动,也可折迭存放。
这种轮椅的形式,采用的是履带式,是利用履带的附着力好,容易爬坡的优点设计的。
但是,由于履带与楼梯的接触时,只是与楼梯的前棱接触,又由于人们对美学的要求好多楼梯的前棱作成了弧形,即使是传统的楼梯,如果经过多年的磨损,前棱也会被磨秃,这样一来,对于这种轮椅就很容易打滑,而且极不安全。
毕业设计(论文)-创新型上楼轮椅说明书

摘要本篇论文针对残疾人上楼困难而设计的一款上楼轮椅,文中首先对国内外各种爬楼轮椅结构进行分析,在对比总结各自优缺点的基础上设计出一款结构简单,操作方便的上楼结构。
该结构采用星轮行星轮结构,在平地时,行星轮工作,上楼时,齿式离合器结合后整个行星齿系将变成一个刚性的整体而转换为星轮结构模式,即各个齿轮均不能自转而只能随整个箱体一起翻转,从而实现上楼功能。
车身则采用滑轨式自动调平结构,该结构简单,调节方便。
AbstractThis paper for the disabled upstairs and of the design difficulties a upstairs wheelchair, this paper first to the domestic and foreign various climbing up a wheelchair structure analysis, in contrast to summarize their respective advantages and disadvantages designed on the basis of a simple structure, convenient operation of the upstairs structure.The structure and the star wheel planetary wheel structure, on the ground, the planet round work, go upstairs, combined with the whole planet gear clutch after tooth department will become a rigid whole and conversion for star wheel structure model, that is, each gears are not only with the whole body rotation and flip together, so as to realize the upstairs function. Body used the slippery course type automatic levelling structure, this simple structure, convenient adjustment.第一章绪论1.1 引言目前市场上的轮椅存在一个很大的不足:由于采用了传统的轮式结构,只能够在平地上行走,面对台阶、楼梯这样比较复杂的地形却显得无能为力。
智能爬楼轮椅毕业设计
智能爬楼轮椅毕业设计智能爬楼轮椅毕业设计随着社会的进步和人口老龄化的加剧,对于残疾人和行动不便的人来说,移动和独立性是他们生活中最重要的需求之一。
然而,现有的轮椅设计往往无法满足他们的需求,尤其是在面对楼梯等障碍时。
因此,我选择设计一款智能爬楼轮椅作为我的毕业设计。
在设计智能爬楼轮椅之前,我进行了大量的市场调研和用户需求分析。
通过与残疾人和行动不便的人进行深入交流,我了解到他们最希望能够自主地爬楼梯,而不是依赖他人的帮助。
因此,我的设计目标是开发一款能够自动爬楼梯的轮椅,让用户能够更加独立地移动和生活。
首先,我选择了轻量化的材料来制造轮椅的主体结构,以确保其重量不会过重,方便用户携带和使用。
同时,我还在轮椅上安装了多个传感器和摄像头,以便实时监测周围环境和障碍物,确保用户的安全。
为了实现轮椅的爬楼功能,我采用了一种创新的设计思路。
轮椅的底部装配了一套特殊的机械装置,可以根据楼梯的形状和高度自动调整。
当用户需要爬楼时,他们只需按下按钮,轮椅就会根据楼梯的情况自动调整,确保用户平稳地上下楼梯。
为了提高轮椅的稳定性和安全性,我还在轮椅的底部安装了一套智能控制系统。
这个系统可以根据用户的体重和姿势自动调整轮椅的重心,确保用户在爬楼过程中的平衡和安全。
同时,系统还可以通过与用户的智能手机或手表等设备连接,实现远程控制和监测。
除了爬楼功能外,我还为轮椅设计了一些其他的智能功能,以提高用户的生活质量。
例如,轮椅上配备了导航系统和语音识别技术,可以帮助用户找到目的地并提供语音导航。
此外,轮椅还可以连接到互联网,让用户可以随时随地与家人和朋友保持联系,享受社交娱乐。
在设计过程中,我还注重了轮椅的外观设计和人性化细节。
轮椅的外观简洁大方,采用了柔和的色彩和流线型的造型,既符合人体工学原理,又能够展现出现代科技的魅力。
同时,我还为轮椅设计了可拆卸的座椅和扶手,方便用户根据自己的需求进行调整和更换。
总的来说,我的智能爬楼轮椅设计旨在提高残疾人和行动不便的人的生活质量和独立性。
爬楼自行轮椅设计论文

毕业设计(论文)题目:爬楼自行轮椅设计学院:专业名称:机械设计制造及其自动化班级学号:学生姓名:指导教师:二 0 二四年五月目录目录 (2)1 前言 (3)1.1 课题研究原因和意义 (3)1.1.1 课题研究的原因 (3)1.1.2 课题研究的意义 (3)1.2 目前国内外研究状况.................................................................................... 错误!未定义书签。
1.2.1 履带式................................................................................................ 错误!未定义书签。
1.2.2轮组式................................................................................................ 错误!未定义书签。
1.2.3 腿式.................................................................................................... 错误!未定义书签。
1.2.4 复合式................................................................................................ 错误!未定义书签。
1.3 目前研究中所存在问题................................................................................ 错误!未定义书签。
2 总体方案设计.............................................................................................................. 错误!未定义书签。
爬梯结构课程设计说明书
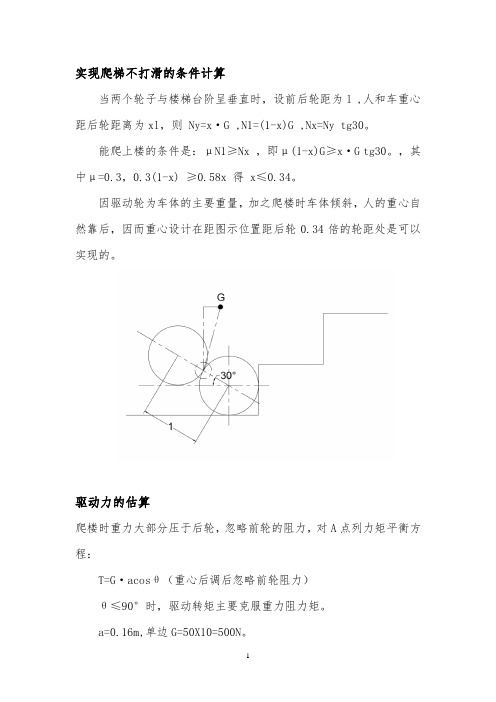
实现爬梯不打滑的条件计算当两个轮子与楼梯台阶呈垂直时,设前后轮距为l ,人和车重心距后轮距离为xl,则 Ny=x·G ,N1=(1-x)G ,Nx=Ny tg30。
能爬上楼的条件是:μN1≥Nx ,即μ(1-x)G≥x·G tg30。
,其中μ=0.3,0.3(1-x) ≥0.58x 得 x≤0.34。
因驱动轮为车体的主要重量,加之爬楼时车体倾斜,人的重心自然靠后,因而重心设计在距图示位置距后轮0.34倍的轮距处是可以实现的。
驱动力的估算爬楼时重力大部分压于后轮,忽略前轮的阻力,对A点列力矩平衡方程:T=G·acosθ(重心后调后忽略前轮阻力)θ≤90°时,驱动转矩主要克服重力阻力矩。
a=0.16m,单边G=50X10=500N。
θ=0°时,T max=500X0.16=80N·m。
驱动手柄r=0.16m,仅用两级链传动减速系统,总传动比10:1,人单手所需最大驱动力为:F max=T/i/r=50N 相当于5公斤力。
考虑到驱动转矩比较大,若选用电机作为原动机,需要专门配备减速系统才能达到所需转矩,而且要配备较大容量的蓄电池。
这样会增加整车的重量。
通过分析比较可采用手柄手摇驱动,双边驱动,以便于差动转向。
图4-2行星齿轮轴结构设计图4-3 行星齿轮轴图4-4爬楼单轮着地时受力情况最差:N=G/2=500 NFt=T/R3=1.1/0.0175=63 NFr=Ft ·tana=63×0.364=23 N14Fr+28N1=52N ,得 N1=917N14N2+14N1=38N ,得 N2=440N经计算 ,A 处弯矩最大,mm 7.12601.012250][1.0d 60][,45,mm 12250N m 12.250N )1.10.6(120.6,)(1.412500024.0024.033b 1A b 12222=⨯=≥=•=•=⨯+==+=•==•=⨯==--σσααca ca A ca A A M A MpaM T M M mN T T mN N M 处的直径钢调质轴选用材料为则取考虑轴承内径并取整 d=15mm齿轮键连接设计轮毂长度 为12 选用圆头平键,L=12 b=h=6强度符合要求][3.256620410044p p MPa dhl T σσ<=⨯⨯⨯==轴承选择Fr1=N1=917 N , Fr2=N2=440N2.74KN 2740N 1010800156012841060nL P C 10800336010L 153360101284N91714.1XF f P 4.1f 3636'h h r p p ==⨯⨯⨯===⨯⨯==⨯⨯===‘荷轴承所需基本额定动载则预期寿命转。
半自动负重爬楼器设计-车体结构设计
半自动负重爬楼器设计-车体结构设计半自动负重爬楼器设计-车体结构设计摘要本毕业设计是一个半自动负重爬楼机设计。
我主要负责车体的设计首先,对半自动负重爬楼机车体结构作了简单的概述;接着进行计算车体的承重选择最经济适用的材料;然后通过查阅设计准则进行设计。
车体结构主要由四部分组成:载货平台,载人平台,主体支架以及前轮支架组成。
在设计之初对比了市面上同类型爬楼机的车体结构设计出方便收纳且承重较好的方案,然后通过CAD做出各个零件的二维图,在通过solidworks建立三维建模,在通过配合装配进行动画模拟。
半自动负重爬楼器向长距离,高速度,低摩擦的方向发展,在设计中,该半自动负重爬楼器结构的研制与应用,与市场先进水平相比,可以说是各有优劣。
在市场上的半自动负重爬楼器结构的制造中存在着许多问题,例如产品功能单一、保护措施不完善、结构强度不合格等。
其中最大的劣势是体积太大,在狭窄楼梯使用不方便。
而体积小巧,则可以增添许多便利。
关键词:车体结构;材料;装配Design of semi-automatic load crawler - body structure designAbstractThe graduation project is a semi-automatic load climbing structure design. First of all, the structure of semi-automatic load-bearing crawler is briefly summarized; then the calculation of the load bearing machine to choose the most cost-effective materials; Then design by consulting the design guidelines. The structure of semi-automatic crawler is composed of six main components: the crawler, the load-bearing mechanism, the motor, the car body, the bracket and the transmission mechanism. In the future, semi-automatic crawlers are developing towards long distance, high speed and low friction. In recent years, semi-automatic load-bearing crawlers are one of them. At present, there is still a big gap between the design and application of semi-automatic negative crawler in China and that of foreign countries.The structural design of semi-automatic load-bearing climbing device represents the general process of design, which has certain reference value for the selection of future design work.Keywords: Vehicle body structure; Materials; assembly目录1、前言 (1)1.1 半自动负重爬楼器的现状及未来趋势 (1)1.2 半自动负重爬楼器的主要用途 (2)1.3 发展方向 (2)1.4 国外研究现状发展方向 (3)1.5 国内现状 (3)1.6 研究方案 (5)2、车体的载荷及方案确定 (7)2.1计算车体的最大载荷 (7)2.2支架轴的设计计算 (8)2.3支架变形计算 (8)2.4轴的结构设计 (10)2.5轴的强度计算 (11)2.6材料选择 (12)2.7载重平台方案 (14)3、半自动负重爬楼器的运动仿真 (20)4、总结 (22)参考文献 (23)致谢 (24)1 前言半自动负重爬楼器是企业短距离运输短距离,较重货物普遍运用到的产品,半自动负重爬楼器设计是否人性化技术是否够好,关系到企业生产效率的高低,从而影响企业的经济效益。
可爬楼梯结构设计毕业设计

可爬楼梯结构设计毕业设计1. 引言本文旨在描述一个可爬楼梯结构的设计方案,该设计方案适用于毕业设计项目。
可爬楼梯结构是指一种能够被人类徒步爬升的结构,通常用于连接不同楼层的楼梯系统。
本文将介绍该设计方案的背景、目标、设计过程以及预期结果。
2. 背景在现代建筑设计中,楼梯系统是连接楼层之间的重要组成部分。
然而,传统的楼梯设计存在一些问题,如步长过大、不便于爬升、缺乏人性化设计等。
因此,为了进一步提升楼梯设计的舒适性和便利性,本设计方案被提出。
3. 目标本设计方案的目标是设计一种可爬楼梯结构,使人们能够轻松、舒适地爬升楼层。
该设计方案要具备以下特点:•步长合适:楼梯的台阶高度和宽度需要被合理设计,以确保人们能够自然地爬升。
•安全稳定:楼梯的结构和支撑系统需要具备足够的强度和稳定性,以保证人们在爬升过程中的安全。
•人性化设计:楼梯的设计要考虑人类的人体工程学特点,使人们能够舒适地爬升。
4. 设计过程4.1 可爬楼梯结构分析在设计可爬楼梯结构之前,我们首先需要分析楼梯的不同部分。
楼梯由台阶、扶手和支撑结构组成。
通过对这些部分的分析,我们可以确定每个部分的设计要求。
4.2 台阶设计台阶是楼梯最基本的组成部分。
在设计台阶时,我们需要考虑以下因素:•台阶高度:每个台阶的高度需要被合理设计,使人们能够舒适地爬升。
一般来说,台阶高度应该不超过18cm。
•台阶宽度:每个台阶的宽度需要足够宽阔,以确保人们能够稳定地站立在上面。
一般来说,台阶宽度应该不小于30cm。
•台阶材料:台阶的材料应该具备耐久性和防滑性能,以减少意外事故的发生。
4.3 扶手设计扶手是可爬楼梯结构的另一个重要组成部分。
在设计扶手时,我们需要考虑以下因素:•扶手高度:扶手的高度需要被合理设计,以便人们能够轻松地扶持身体。
一般来说,扶手的高度应该与人的肩膀齐平。
•扶手宽度:扶手的宽度需要足够宽阔,以便人们能够舒适地握住扶手。
一般来说,扶手的宽度应该不小于10cm。
集美大学《便捷式助力上楼运载小车说明书》解析
第十届全国大学生机械创新设计大赛预赛参赛作品便捷式助力上楼运载小车说明书设计者:林烨柯荜正黄廷朝吴晓峰詹志坚指导教师:周梅李波(集美大学机械与能源工程学院,厦门361021)摘要:以便捷、实用、有效的解决广大群体进行载运和搬动物品上楼等方面的问题为研究对象,设计出一种伞骨式折叠三角轮以及可滑动方便拆卸的置物分隔层的便捷式助力运载装置从而实现通过轮子的伸缩和置物分隔层的拆卸来提高他们在运载和搬运物品方面的效率。
实践表明,该产品工作稳定,性能可靠,使用方便快捷。
关键词:伞骨式折叠三角轮滑轨置物分隔层便捷高效作品内容简介本作品根据本届机械创新设计大赛的主旨要求而设计,属于“商品载运及助力机械装置”。
未折叠前该作品长40cm,宽45cm,高100cm,折叠后长63cm,宽45cm,高18cm,作品可分为四个部分,车身、置物分隔层、伞骨式折叠三角轮以及动力装置,在使用前,将上拉杆逆时针翻转180度,扣上折叠扣手,装载物品时,将置物分隔层沿滑轨移入对应位置,之后倾斜车身,按下拉杆上的开关,打开电机即可。
当遇到楼梯时,将三角轮沿水平面展开,顺时针旋转一定角度后锁定轮子,之后按下拉杆上的开关,打开电机即可。
1研制背景及意义搬运物品上下楼梯是普通日常生活中很平常的一种行为,在那些大量不设电梯的七层以下的住宅房居住的居民,尤其是那些老年人和小孩,搬运物品时及其不方便的事情,根据国内实际情况,目前大部分爬楼运货仍以传统人工或人力装置为主,而人力装置安全性不高,对人身和设备构成了威胁。
面对能有效减轻工作强度,提高工作效率及安全性的迫切需求,项目团队设计了一款新型省力高效的爬楼搬运装置,该装置平地楼梯均适应,实用性强,既可以在平地上载物,也可以在不同构造的楼梯间将重物轻松快捷的搬运。
于此同时该装置在实现轻松便捷拆卸货物方面起到了高效率的作用。
在实用性方面该装置体积不大,可折叠携带方便,操作简单,价格适中,使用人群广泛,尤其是对于老人、孩子、及妇女携重物上楼更加方便。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前言近年来随着计算机技术蓬勃发展,计算和数据传送速度大幅度提高。
以此硬件为基础,许多智能算法得以在短时间内实现,智能机器人正变得越来越聪明。
随着现实生活中对机器人技术应用的发展,使得机器人成为战胜自然和虚拟障碍的必需品。
在很多危险场所,如战场、核生化灾害地、恐怖爆炸地等需要愈来愈多的移动机器人搭载机械手等设备代替人去执行任务。
众所周知机器人自主爬楼梯是移动机器人完成危险环境探查、侦察、救灾等任务需要具备的基本智能行为之一。
目前,主要有腿式、履带式、轮式爬楼车移动机器人,腿式的如四足和六足机器人,尽管这些机器人能够爬楼梯和穿越障碍,但由于腿部的运动,它们不能在平坦的表面上平滑运动;履带式移动机器人以其强大的地形适应性而倍受青睐,其所受的摩擦力均匀分布在履带上,而轮式小车的摩擦力只是集中在轮胎与地面的接触面上,就抓地力而言它们是一样的,但在小车转弯或者爬坡时,履带式小车所受的摩擦力分布不会像轮式小车那样发生剧变,所以就表现出更好的操控性,但是转弯时,履带的磨损、履带开模难度大等都成为其应用的瓶颈;轮式移动机器人克服了履带式的这些缺点,在满足一定地形适应性的前提下,可以充分发挥移动机器人移动灵活、控制简单等优点。
一般来说,轮式移动机器人对地形的适应性大小与轮子的数量成正比,但随着轮子数量的增加,又带来了机器人体积庞大、重量重等缺点。
爬楼轮式行驶系统均采用各轮独立驱动,自主工作的方式,同时各轮均采用弹性悬挂方式,故工作起来方便灵巧,同心性和转向性均较好。
刚性轮具有较高的机械可靠性,较好的转向性和环境适应性,但其行驶稳定性和耐磨损性均较差。
充气轮虽然具有较好的行驶稳定性和越障能力,但其环境适应能力差,故不能应用到爬楼车中。
金属弹性轮的爬坡性能、耐磨损性、环境适应性以及机械可靠性、越障能力均较好,但其转向性能较差。
椭圆轮、半球轮和无毂轮的爬坡和越障性能及耐磨损性能均较好,但其行驶稳定性较差,机械可靠性最低。
综合各方面的优缺点,轮式机器人是比较合理的。
该爬楼车辆包括:传动系统、行驶系统和转向系统三大系统。
本课题着重进行行驶系统的结构设计,课题内容包括行驶系统机构设计、三角轮系参数设计。
1 爬楼车设计方案说明本课题拟开发一种采用三角轮系做为行驶系统的爬楼车辆。
该车辆在行驶过程中,在遇到台阶和斜坡等特殊路面时,可通过三角轮系的翻转实现爬楼越障功能。
该车辆包括:传动系统、行驶系统和转向系统三大系统。
该爬楼车辆可实现自动跨越障碍和爬楼梯功能,平整路面最大行驶速15Km/h,可爬楼梯高度为100~200mm,楼梯宽度为200~300mm,最大爬行坡度为40°。
传动系统采用电机驱动,可双向行驶,可手动控制和自动控制,要求传动系统运行平稳、噪音小、安全可靠。
行驶系统采用三角轮系方式,在平整路面行驶时,每组轮系中有两个轮着地;在爬楼梯上爬行时,通过三角轮系的翻滚实现爬楼功能。
转向系统采用电机驱动,要求转变半径尽可能小。
2 爬楼车的工作原理与特点该爬楼车辆包括:传动系统、行驶系统和转向系统三大系统。
此三大系统共同构成爬楼车的机械装置部分,各个系统都由相应的电机来驱动。
行驶系统是靠电机带动一个一级圆锥齿轮传动和两个一级圆柱齿轮传动来实现减速和增大扭矩,并带动整个主轴转动来实现三角轮系的翻转,三角轮系的翻转也就实现了爬楼功能。
具体是三角轮系中的三个轮子通过支架连接在一起,主轴转动时,爬楼车依靠三角轮系中的三个轮子依次与台阶相啮合,从而达到上下楼梯的功能。
转向系统,为了实现在较小的空间内实现转弯半径最小的要求,本次设计采用了独立的转向方式,即通过增加副车架,用电机带动整个传动系统和行驶系统以及轮系偏转,以达到转弯的目的。
具体方案是通过一根有足够强度的轴实现的,轴的下端与爬楼车的前轴装置的壳体相连,上端与一块转向板通过轴承连接,轴中间安装一大圆锥齿轮,选一合适电机固定在上端板上面,并通过联轴器使一齿轮轴与电机相连,同时齿轮轴与大圆锥齿轮以一定的转动比啮合传动,当需要转弯时,感应系统和控制装置根据实际需要控制转过的角度。
传动系统是靠电机带动行星齿轮来实现爬楼车在水平面以及斜坡面环境下行驶的目的,其中前后轴交叉使用动力装置,也就是前轴的左三角轮系和后轴的右三角轮系有动力装置,相反另外两个三角轮系仅为从动轮,对爬楼车起支撑的作用,在行驶时它们是自由的这样既节省了电机数量又减少了爬楼车的重量。
该爬楼车有五个特点:1)结构简单,整体尺寸不大且重量较小;2)各个系统分别由各自独立的电机所驱动,控制灵活方便;3)可安装或装载一定重量的仪器或实验装置在危险的地方或者人体到不了的地方进行作业或取样;4)采用三角轮系式系统,使爬楼车能够在多种环境下运动,轻松实现在平地、坡面和台阶面上的运动;5)该爬楼车采用了独立的转向系统,不但使转向系统简化,并且转弯半径减小,有利于实现在狭小空间内的转弯3 设计方案分析关于行驶系统的设计,如图1所示。
具体是电机输出轴通过联轴器接一小圆锥齿轮410,该小圆锥齿轮与大圆锥齿轮411啮合传动实现减速,该大圆锥齿轮与三角盘412通过螺钉连接在一起,大圆锥齿轮转动时带动三角圆盘一起转动。
三角圆盘上装有三根轴413,小圆柱齿轮414(3个)、415(3个)分别装在这三根轴上,齿轮416与爬楼车壳体固定在一起。
三角盘转动时,通过轴413带动小圆柱齿轮414既自转又公转与齿轮416啮合传动,同时也带动小圆柱齿轮415既自转又公转与齿轮417啮合传动进一步实现减速,齿轮417与主轴329通过圆锥销固连在一起,齿轮417转动的同时也带动主轴转动,并通过三角轮系图2的翻转实现爬楼功能。
具体是三角轮系中的三个轮子通过支架连接在一起,主轴转动时,爬楼车依靠三角轮系中的三个轮子依次与台阶相啮合,从而达到上下楼梯的功能。
小圆柱齿轮414、415的大小相同,但齿数和传动比不同,用以增大主轴所传递的转矩,为三角轮系的翻转提供足够的能量。
图1 翻转机构图2 三角轮系4 设计计算选择电动机结合该课题的实际情况,需要用一个电机来驱动主轴上的齿轮传动,带动主轴转动以及三角轮系翻滚从而实现爬楼功能。
考虑到爬楼车及载荷的重量(75千克),三角轮系翻转所需的最大扭矩值已算出为:T= N·m则三角轮系翻转爬楼梯时所需消耗的功率为:P=Tn/=×26÷=200 W已知爬楼车行驶系统采用一级圆锥齿轮传动和两个一级圆柱齿轮传动,它们的传动效率分别为:η=,η=,深沟球轴承的效率为:η=,联轴器的效率为:η=则电动机输出功率为:d P =P/××××= W那么,该爬楼车的行驶系统所需的电动机功率为: W ,查机械设计手册,可选择的电动机有:型号 输出转矩 输出转速 额定功率 额定电压 减速比 额定转速 (N/mm) (r/min) (W) (V ) (r/min) 90SZ53 2977 750 308 110 4 3000 110ZYT54 2977 750 308 220 4 3000选取110ZYT54型号的电机为本爬楼车辆的驱动电机。
选择联轴器根据电动机的输出轴轴径是22mm,以及电机轴和齿轮轴在工作中不能发生相对位移,所以选择凸缘联轴器。
YL3凸缘联轴器130142813J J B ⨯⨯ GB5843-86主动端:J型孔轴,A 型键槽,mm L mm d 14,30== 从动端:1J 型轴孔,B 型键槽,mm L mm d 13,28==关于减速装置(圆锥—圆柱齿轮减速)电机的输出转速为750r/min ,根据经验爬楼车每爬一阶楼梯需要,且三角轮系转速为26 r/min ,则减速比为:i = 75/26=多级传动中,总传动比应为: i =1i 2i 3i查机械设计手册,并根据各级传动机构的传动比应尽量在推荐范围内,选择和分配各级传动比:选择锥齿轮传动比1i =3,一级圆柱齿轮传动比为2i = ,二级级圆柱齿轮传动比为3i =3。
4.3.1锥齿轮的设计计算(此计算过程中所查的表出自《机械设计(邱宣怀)·第四版》)mm189.8 EZ=2.5 Z=mm1/2 189.8aMP 2.511d sin 2δ=232.1615.450.95='26''16267334-=2212z z + 224.3.2圆柱齿轮的设计计算(此计算过程中所查的表出自《机械设计(濮良贵)·第七版》)1u 1u [Z σ±⎛ ⎝)确定公式内的各计算数值t K = )计算小齿轮传递的转矩mm mm,小圆锥齿轮作悬臂布置,选取齿宽系数: d Φ= 查得材料的弹性影响系数1/2a1u 1u 11946.1 4.20.4 3.2[Z σ±⨯⎛ ⎝)计算圆周速度v1t d = ×=)计算齿宽与齿高直之比模数: t 1t d m =齿高: h = m轴的设计计算1.三角轮系翻转主轴的设计计算(材料为45钢)按扭转强度条件计算,轴的扭转强度条件为[]639.55100.2T T TPTn W d ττ⨯=≈≤式中: T τ——扭转切应力,单位为a MP ;T ——轴所受的扭矩,单位为mm N ;T W ——轴的抗扭截面系数,单位为3mm ; n ——轴的转速,单位为r/min ;P ——轴传递的功率,单位为KW ; d ——计算截面处轴的直径,单位为mm ;[]T τ——许用扭转且应力,单位为a MP ,见表15-3。
由上式可得轴的直径]3010P P d A n n≥= 式中0A = 我们所设计的轴的材料选用45钢,查机械设计手册相表:表1得45钢:A=103~126 。
对于空心轴,则:d A≥式中1ddβ=,即空心轴的内径1d与d之比,通常取~,这里我们取β=。
代入数据得,主轴外径:11223.7mmd≥=取d=25mm,则主轴内径:10.562514mmd dβ==⨯=2.行星轮系轴的设计计算(材料为45钢)计算方法同上,此轴采用实心轴,则10610.62mmd A≥==应当指出,当轴截面上开有键槽时,应增大轴径以考虑键槽对轴的削弱。
对于直径d≤100mm的轴,有一个键槽时,轴径增大5%~7%;有两个键槽时,轴径增大10%~15%.然后圆整为标准的直径。
此行星轮系轴截面上开有两个键槽,设轴径增大12%,则d=×=mm,圆整为12mm。
行星轮系轴如图3所示:轴上有两个键槽,通过键与圆柱齿轮联接,带动齿轮传动;轴右端带有螺纹,通过圆螺母用以轴向固定右边的圆柱齿轮;左边的轴肩用以固定轴承内圈。
图3 行星轮系轴键联接的校核强度平键联接传递转矩时,对于采用常见的材料组合和按标准选取尺寸的普通平键联接(静联接),其主要失效形式是工作面被压溃。