CH06 输入输出控制 (1)
CH6-EFRT型仪表使用和操作说明书(PT100和WIO)

CH6 仪表说明书CH6-EFRT 型仪表使用和操作 说明书(PT100 和 WIO)目 录1 概述...........................................................................................................2 1.1 仪表型号..................................................................................................2 1.2 主要技术参数...............................................................................................2 2 仪表与 PT100 和 WIO 接线图..........................................................................3 3 参数设置及故障动作说明............................................................................4 3.1 PT100 参数设置及说明.....................................................................................4 3.2 WIO 参数设置及说明..................................................................................4 4 仪表参数设置方法......................................................................................4 4.1 参数组说明......................................................................................................4 4.2 oR 参数之前的参数设置方法........................................................................5 4.3 密码设置方法.................................................................................................................5 4.4 oR 参数之后的参数设置方法...........................................................................5Version 01Grundfos Service Engineering TeamPage 1 of 6CH6 仪表说明书1 概述1.1 仪表型号 CH6- E F R T AO B1 V0供电电源:85V AC~265V AC 外供输出:外供 24V/50mA 变送输出: 无变送输出 报警方式:2 组继电器输出显示颜色:红色面板形状:方形尺寸: 48(W)×48(H)×108(L) 系列:系列名称1.2 主要技术参数表 1.1 主要技术参数项目 基本误差 测量周期 报警输出 供电电源 工作环境 输入信号类型 外供输出电源 小于 0.5%F.S 0.2 秒 2 组继电器输出,触点容量 220V AC,3A 85V AC~265V AC,100V DC~380V DC,功耗小于 4W 0℃~50℃,湿度低于 85%R.H,无结露。
RKC温控表CH102

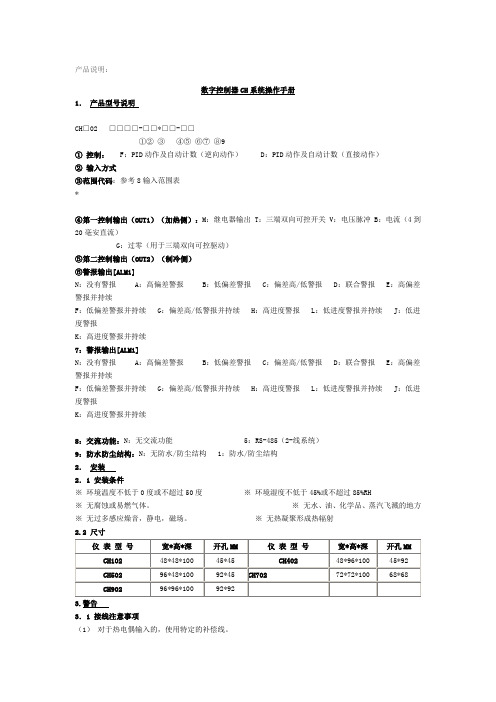
数字控制器CH系统操作手册1.产品型号说明CH□02□□□□-□□*□□-□□①② ③④⑤ ⑥⑦ ⑧9① 控制:F:PID动作及自动计数(逆向动作) D:PID动作及自动计数(直接动作)② 输入方式③范围代码:参考8输入范围表*④第一控制输出(OUT1)(加热侧):M:继电器输出 T:三端双向可控开关 V:电压脉冲 B:电流(4到20毫安直流)G:过零(用于三端双向可控驱动)⑤第二控制输出(OUT2)(制冷侧)⑥警报输出[ALM1]N:没有警报A:高偏差警报 B:低偏差警报C:偏差高/低警报 D:联合警报 E:高偏差警报并持续F:低偏差警报并持续 G:偏差高/低警报并持续 H:高进度警报 L:低进度警报并持续 J:低进度警报K:高进度警报并持续7:警报输出[ALM1]N:没有警报 A:高偏差警报 B:低偏差警报 C:偏差高/低警报 D:联合警报 E:高偏差警报并持续F:低偏差警报并持续 G:偏差高/低警报并持续 H:高进度警报 L:低进度警报并持续 J:低进度警报K:高进度警报并持续8:交流功能:N:无交流功能 5:RS-485(2-线系统)9:防水防尘结构:N:无防水/防尘结构 1:防水/防尘结构2.安装2.1 安装条件※ 环境温度不低于0度或不超过50度※ 环境湿度不低于45%或不超过85%RH※ 无腐蚀或易燃气体。
※ 无水、油、化学品、蒸汽飞溅的地方※ 无过多感应燥音,静电,磁场。
※ 无热凝聚形成热辐射3.警告3.1 接线注意事项(1)对于热电偶输入的,使用特定的补偿线。
(2)对于热电阻输入的,使用低电阻线,并且三个线头间不带电阻差。
(3)将输入信号线绕开仪表电源,电气设备电源及负荷线以防止燥音感应。
(4)对于电流输入,必须由输入端提供一个250欧的电阻器(±0.02%±10ppnm, 0.25W)。
3.2 仪表接线电源供给电压:90至264V交流电50/60HZ 、≤7W警报输出等级:继电器联接输出:250伏交流电,1安(电阻性负载)控制输出等级:继电器联接输出:250伏交流电,3安(电阻性负载)电压脉冲输出:0/12伏直流电(负荷电阻600欧或更多)电流输出:4至20MA直流电(负荷电阻600欧或更少)过零输出(用于三端双向控制驱动):过零触发用4.面板说明1)所测数值(PV)显示单元:显示所测得的数值(PV)、显示仪表的不同参数标记2)设置数值(SV)显示单元:显示设置的数值(SV)、显示仪表的不同设置参数3)指示灯**自动整定指示灯(AT),在自动整定时闪烁控制输出指示灯(OUT1),在控制输出打开时亮警报输出指示灯(ALM1),在警报时亮辅助输出指示灯(OUT2),在辅助输出打开时亮4)设置键(SET):用于输入/调出参数,按二秒以上可以读出表二数据5)转换和R/S键(R/S):在设置改变时转换数字(转换键),用于选择运行/停止功能6)下降键:用于降低数字7)上升键:用于升高数字5.显示模式状态5.1每个模式的开启程序打开电源→显示输入方式→显示输入范围(大约显示4秒钟)→如果按键后没有反应的时间超过1分钟,仪表回复到PV/SV 显示模式状态。
ch6-1 CPU的组成和功能

5
6.1 中央处理器的功能和组成
2.专用寄存器 专用寄存器是专门用来完成某一种特 殊功能的寄存器。CPU中至少要有五个专 用的寄存器。它们是:程序计数器(PC)、 指令寄存器(IR)、存储器地址寄存器 (MAR)、存储器数据寄存器(MDR)、 状态标志寄存器(PSWR)。
死书读活人,可以把人读死。郭沫若
8
6.1 中央处理器的功能和组成
⑷ 存储器地址寄存器 存储器地址寄存器用来保存当前 CPU 所访问的主存单元的地址。由于主存和 CPU 之间存在着操作速度上的差别,所以 必须使用地址寄存器来保持地址信息,直 到主存的读/写操作完成为止。 当 CPU 和主存进行信息交换,无论是 CPU向主存存/取数据时,还是CPU从主存 中读出指令时,都要使用存储器地址寄存 器和数据寄存器。
人是活的,书是死的。活人读死书,可以把书读活。 死书读活人,可以把人读死。郭沫若
13
6.1 中央处理器的功能和组成
3.外部工作频率 由主板为CPU提供的基准时钟频率。 内频=外频×倍频 4. 前端总线频率 前端总线FSB(Front Side Bus是CPU 和外界交换数据的最主要通道,主要连接主 存、显卡等数据吞吐率高的部件,因此前端 总线的数据传输能力对计算机整体性能作用 很大。
第 6章
中央处理器
人是活的,书是死的。活人读死书,可以把书读活。 死书读活人,可以把人读死。郭沫若
1
6.1 中央处理器的功能和组成
6.1.1 CPU的功能 在控制器的控制下按照事先编制的程序逐条 执行。 指令流指的是处理器执行的指令序列。 数据流指的是根据指令操作要求依次存取数 据的序列。
CH6-RJ3 操作手册

6 执行程序本章介绍测试程序和自动操作 本章目录6.1程序暂停和恢复6.2执行程序6.3测试6.4手动操作焊接设备6.5焊接调整6.6手动输入输出控制6.7手动操作机械手6.8自动操作6.9在线位置修改6.1 程序暂停和恢复程序暂停的作用是让一个正在运行的程序停下来。
程序暂停由以下几种情况产生:当程序正在运行的时候,突然产生一个警报。
由操作者特意发出一个指令来停止正在运行的程序。
正在工作的机器人可能用以下的方式之一来停止工作:快停:机器人快速减速直到停止。
慢停:机器人慢速减速直到停止。
程序暂停可以分为两种方式:强迫终止(end):现实程序执行的终止状态。
在教导盒的屏幕上显示”ABORTED”。
如果当子程序正在被执行的时候主程序被终止了,那么对主程序的控制返回值信息就会丢失。
暂停(暂时的停止):程序的被暂时地停止。
教导盒的屏幕上显示”PAUSED”。
被暂时停止的程序可以恢复执行。
程序调用指令调用出的子程序返回去控制主程序。
为了从同一个程序的另外一行或者另外一个程序开始,可以通过退出程序来释放paused 状态。
有两种方法来有意地暂停程序:按下教导盒或者机器操作面板上的紧急停机按钮,或者关闭伺服电源的开关。
外围设备输入输出口的输入信号IMSTP按下教导盒上的HOLD按钮,或者使用外围设备输入输出口的输入信号HOLD,这些输入能够暂停程序的执行。
从混合菜单中选择 1 ABORT(ALL)或者使用外围设备的输入输出口的输入信号CSTOPI这个方法异常终止程序。
6.1.1 使用紧急停机按钮暂停和恢复按下在机器操作面板(盒)或者教导盒上的紧急停机按钮,可以让机器人立即停止下来。
此时会发出一个紧急停止警报。
按下紧急停机按钮会产生以下结果:机器人立即停止操作,并且程序暂停。
发出一个警报并且关断伺服系统的电源。
流程6-1 紧急停机与恢复紧急停机流程步骤1:按下在教导盒或者机器操作面板上的紧急停机按钮。
这个操作将暂停正在运行的程序,教导盒屏幕上显示PAUSED。
deltav控制系统基本功能组态步骤

兰州石化职业技术学院电子电气工程系美国艾默生Deltav DCS系统过程控制综合实验装置基本功能组态及操作流程宋国栋严新亮二零一零年五月一日1,Deltav Explorer 的进入进入的路径是Start\\Deltav\\Engineering\\Deltav Explorer,也可以在Run中输入exp直接进入,如下图:进入后的窗口如下图:我们可以看到在左侧的浏览器中列出了系统详细的信息,首先找到控制网Control Network,我们可以看到,在控制网下有三个站,分别是控制站CTRL,工程师站SCHOOL-ES,操作员站SCHOOL-OP,当然了我们可以右击Control Network新建各个站。
2,I/O卡件的组态通过上一步我们在控制站CTRL下找到I/O菜单,然后右击选择新建卡件,出现如下图的窗口:在这个窗口中输入卡的类型,在控制站中的位置等信息。
实验室控制站中卡件清单如下:3,I/O卡点的组态在控制站CTRL下找到I/O,然后右击,找到配置Configure I/O,进入下面窗口:水箱液位所对应的通道是第三个卡件的第八个通道,所以以下水箱液位为例:首先选中Enabled,在Device Tag一栏中输入设备标签,“位号”和“设备信号标识”不是一个概念,它们与I/O通道的分配过程有关,输入LT3。
同理,在本例中还需要一个控制输出,它所对应的通道是C05CH01即第五个卡件的第一通道,DST是FV1。
实验系统中详细的I/O测点清单将在最后附表中给出。
4、创建一个厂区“厂区”是组态中的一个虚拟的分区,与工厂的实际划分情况没有必然联系。
在SystemConfiguration下找到Control Strategies,然后右击选择新建厂区,然后将其命名为JYHD,如下图:然后右击此厂区选择Assign下的Events To Station,进入如下窗口,然后将两个站分两次确定。
5、利用模板在厂区中新建位号在Library下的Module Templates下的Monitoring下找到ANALOG,然后将其拖拽到新建的厂区中,并将其命名为LT-1803,然后右击LT-1803,选择Open With Contrlo Studio,进入如下窗口:中通过路径找到控制站下的LT3,这样就将现场和控制室连接了起来。
ch6-2 输入输出方式与中断
下面以外部中断为例,简要介绍中断处理过程
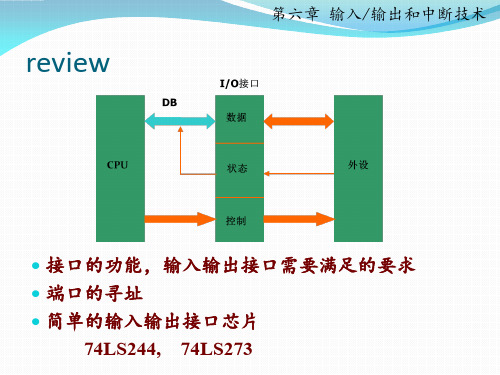
第六章 输入/输出和中断技术
1. 中断请求
当外设需要CPU服务时,首先需要向CPU发出一 个有效地中断请求信号
中断请求信号的触发方式:
边沿触发——CPU能立即响应的中断可以采用 如 NMI
程序来完成的(PIO方式) 硬件: I/O接口和存储器的读写控制信号、地址信号
都是由CPU发出的 缺点:程序的执行速度限定了传送的最大速度(约
为几十KB/s)
第六章 输入/输出和中断技术
四、DMA控制方式
特点: 外设直接与存储器进行数据交换 ,CPU不再担当
数据传输的中介者 总线由DMA控制器(DMAC)进行控制(CPU要
INTR中断 NMI中断
第六章 输入/输出和中断技术
8086/8088的外部中断信号:INTR、NMI
INTR——可屏蔽中断请求,高电平有效,受IF标志的 控制。IF=1时,执行完当前指令后CPU对它作出响应。 中断请求信号应保持到中断被处理为止。CPU响应中 断后,中断请求信号应及时撤销
• NMI(中断类型码是2)中断响应过程与内部中断 类似
D0~D7
译码器 IOW
≥1
A7~A4
A15~A8
A3 A2 A1 A0
74LS138
&G Y0
≥1 G2A
G2B
C B
Y1
A
IOR
≥1
74LS273
D0 Q0 | Q1 D7 Q2
Q3 Q4 CP Q5 Q6 Q7
D0
7406 Rx8 反相器
CH6使用说明书CH6-AHRTA1B1V0控制器
)仪表与2线制变送器电流信号的接线
A-S规格80×160尺寸的仪表(mm)
外形尺寸
开孔尺寸接线端子图
B-F规格96
外形尺寸
开孔尺寸接线端子图
开孔尺寸接线端子图
、
键调出当前参数的原设定值,闪烁位为修正位
通过键移动修改位,键增值、
键存入修改好的参数,自动转到下一参数。
键后将转到本组第
重复②
,直到显示
键进入修改状态,,,
密码在仪表上电时或
不松开,顺序进入各参数组,仪表显
键调出当前参数的原设定值,闪烁位为修改位
通过键移动修改位,键增值,
以符号形式表示参数值的参数,在修改时,闪烁位应处于末位。
重复④~ 以下为测量及显示相关参数,设置不正确,可能使仪表显示不正常。
、
种:
变送输出
变送输出有5个参数:
)——输出信号选择
补偿前温度+
影响,该温度可能会高于室温。
在实际应用中,补偿导线接到输入端子,仪。
CH06 - DSP片内外设

第6章 DSP片内外设教学提示:TMS320C54x DSP的片内外设是集成在芯片内部的外部设备。
本章将以C5402 DSP为主详细介绍其可编程定时器、串行口、主机接口、通用I/O以及软件等待状态发生器和分区转换逻辑。
教学要求:掌握可编程定时器、标准同步串行口、标准8位主机接口、通用I/O的特点和操作过程,能够应用。
了解多通道缓冲串口(McBSP)、8位增强主机接口HPI-8、软件等待状态发生器和分区转换逻辑。
6.1 DSP片内外设概述TMS320C54x DSP的片内外设是集成在芯片内部的外部设备。
CPU核对片内外设的访问是通过对相应的控制寄存器的访问来完成的。
外部设备集成在芯片内部主要有以下优点:(1) 片内外设访问速度快。
因为片外外设必须通过与程序、数据总线共用的外部总线来访问,访问速度慢,而片内外设的访问或操作速度大大快于外部I/O空间中的片外外设。
(2) 可以简化电路板的设计。
如将A/D转换、D/A转换、定时器集成在片内。
(3) 提供一些必须的特殊功能。
这些特殊功能必须以片内外设的方式来实现,如JTAG 口、等待状态发生器等。
TI公司将相关的片内外设分为两大类:片内外设和增强型片内外设。
其中片内外设主要包括串行接口、定时器、通用I/O引脚和标准主机接口(HPI8)。
增强型外设主要包括多通道缓冲串口(McBSP)、主机接口(8位增强HPI-8、16位增强HPI-16)、DMA控制器。
所有的C54x DSP的CPU结构及功能完全相同,但是片内的外设配置多少不同。
任何一款C54x DSP拥有的片内外设都只是以上列举的片内外设的一部分。
片内外设的操作是通过相关的控制寄存器来实现的,寄存器被映射到数据存储空间的第0页(地址20h~5Fh)。
具体的映射关系如表6-1所示。
表6-1 C5402外设存储器映像寄存器地址(十六进制) 名称描述McBSP0数据接收寄存器220 DRR20McBSP0数据接收寄存器121 DRR10McBSP0数据发送寄存器222 DXR20McBSP0数据发送寄存器123 DXR10定时器0寄存器24 TIM定时器0周期计数器25 PRDDSP技术及应用·164·续表地址(十六进制) 名称描述定时器0控制寄存器26 TCR27 ―保留软件等待状态寄存器28 SWWSR块切换控制寄存器29 BSCR2A ―保留软件等待状态控制寄存器2B SWCRHPI控制寄存器2C HPIC2D~2F ―保留定时器1寄存器30 TIM1定时器1周期计数器31 PRD1定时器1控制寄存器32 TCR133~37 ―保留McBSP0 串口子块地址寄存器38 SPSA0McBSP0 串口子块数据寄存器39 SPSD03A~3B ―保留通用I/O引脚控制寄存器3C GPIOCR通用I/O引脚状态寄存器3D GPIOSR3E~3F ―保留McBSP1数据接收寄存器240 DRR21McBSP1数据接收寄存器141 DRR11McBSP1数据发送寄存器242 DXR21McBSP1数据发送寄存器143 DXR1144~47 ―保留McBSP1串口子地址寄存器48 SPSA1McBSP1串口子数据寄存器49 SPSD14A~53 ―保留DMA通道容许与优先控制寄存器54 DMPRECDMA子块地址寄存器55 DMSA带子块地址递增的DMA数据寄存器56 DMSDIDMA子地址寄存器57 DMSDN时钟模式寄存器58 CLKMD59~5F ―保留·164·第6章 DSP片内外设·165·6.2 可编程定时器C5402有两个片内定时器,主要用来产生周期性的中断。
机器人机构学【ch06】并联机器人机构拓扑结构特征与综合 培训教学课件

“
可分离活动度
当机构可以分割为两个或多个独立的运动子链,且每个子链的从动连杆相对于机架的
位姿只是该子链内主动输入的函数时,该机构具有可分离活动度。
”
活动度类型与控制解耦原理
活动度类型判定准则如下: 1)当F个主动副位于同一个BKC的诸支路中时,机构具有完全活动度。
2)当F个主动副位于不同BKC的支路中时,机构具有部分活动度。
第六章
并联机器人机构拓 扑结构特征与综合
工业和信息化部“十四五”规划教材
机器人机构学
01
并联机器人机构结构组成
并联机器人机构结构组成
并联机器人机构结构分解
如图6-1所示,任一基本回路数为v的并联机器人机构可视为由动平台、静平台以及两者之间并联的v+1 个单开链(SOC)支路组成。
并联机器人机构结构组成
本运动链(BKC)组成。
基本运动链判定准则
按照机构耦合度算法,机构被依次 分解为1个SLC和v-1个SOC。
“
基本运动链的重要性质 1)基本回路数为v且只由R副组成的BKC类型只存在有限种。
”
多回路机构耦合度
2)每一种BKC的运动学正解(包括复数解)数目NBKC是一不变量,v=1~3的平面BKC的NBKC如表6-2所示。 3)并联机器人机构的混合单开链(HSOC)支路中包含BKC,有利于实现并联机器人机构控制解耦。
并联机器人机构结构组成
并联机器人机构结构组成
混合单开链支路及其等效单开链:含有回路的开链称为混合单开链,如图6-2(a)所示。
并联机器人机构结构组成
更一般地,混合单开链可由并联机器人机构(单回路机器人机构可视为回路数为1的并联机器人机构)串 联若干运动副和连杆组成,如图6-3(a)、(b)所示。
RKC CH102 说明书
RKC CH102 说明书文章来源:/数字控制器CH系统操作手册1.产品型号说明①控制:F:PID动作及自动计数(逆向动作) D:PID动作及自动计数(直接动作)②输入方式③范围代码:参考8输入范围表*④第一控制输出(OUT1)(加热侧):M:继电器输出 T:三端双向可控开关 V:电压脉冲 B:电流(4到20毫安直流)G:过零(用于三端双向可控驱动)⑤第二控制输出(OUT2)(制冷侧)⑥警报输出[ALM1]N:没有警报 A:高偏差警报 B:低偏差警报 C:偏差高/低警报 D:联合警报 E:高偏差警报并持续F:低偏差警报并持续 G:偏差高/低警报并持续 H:高进度警报 L:低进度警报并持续 J:低进度警报K:高进度警报并持续7:警报输出[ALM1]N:没有警报 A:高偏差警报 B:低偏差警报 C:偏差高/低警报 D:联合警报 E:高偏差警报并持续F:低偏差警报并持续 G:偏差高/低警报并持续 H:高进度警报 L:低进度警报并持续 J:低进度警报K:高进度警报并持续8:交流功能:N:无交流功能 5:RS-485(2-线系统)9:防水防尘结构:N:无防水/防尘结构 1:防水/防尘结构2.安装2.1 安装条件※环境温度不低于0度或不超过50度※环境湿度不低于45%或不超过85%RH※无腐蚀或易燃气体。
※无水、油、化学品、蒸汽飞溅的地方※无过多感应燥音,静电,磁场。
※无热凝聚形成热辐射2.2 尺寸3.警告3.1 接线注意事项(1)对于热电偶输入的,使用特定的补偿线。
(2)对于热电阻输入的,使用低电阻线,并且三个线头间不带电阻差。
(3)将输入信号线绕开仪表电源,电气设备电源及负荷线以防止燥音感应。
(4)对于电流输入,必须由输入端提供一个250欧的电阻器(±0.02%±10ppnm,0.25W)。
3.2 仪表接线电源供给电压:90至264V交流电50/60HZ 、≤7W警报输出等级:继电器联接输出:250伏交流电,1安(电阻性负载)控制输出等级:继电器联接输出:250伏交流电,3安(电阻性负载)电压脉冲输出:0/12伏直流电(负荷电阻600欧或更多)电流输出:4至20MA直流电(负荷电阻600欧或更少)过零输出(用于三端双向控制驱动):过零触发用4.面板说明1)所测数值(PV)显示单元:显示所测得的数值(PV)、显示仪表的不同参数标记2)设置数值(SV)显示单元:显示设置的数值(SV)、显示仪表的不同设置参数3)指示灯**自动整定指示灯(AT),在自动整定时闪烁控制输出指示灯(OUT1),在控制输出打开时亮警报输出指示灯(ALM1),在警报时亮辅助输出指示灯(OUT2),在辅助输出打开时亮4)设置键(SET):用于输入/调出参数,按二秒以上可以读出表二数据5)转换和R/S键(R/S):在设置改变时转换数字(转换键),用于选择运行/停止功能6)下降键:用于降低数字7)上升键:用于升高数字5.显示模式状态5.1每个模式的开启程序打开电源→显示输入方式→显示输入范围(大约显示4秒钟)→如果按键后没有反应的时间超过1分钟,仪表回复到PV/SV 显示模式状态。
Ch06-RstBoot(k60中文)

第六章复位和启动6.1 简介MCU支持的复位源有:表6-1 复位源除了EzPort和MDM-AP复位之外,每个系统复位源在系统复位状态寄存器(SRSH和SRSL)都有相应的位。
详见模式控制器一章。
EZP_引脚决定的功能模式下选择单片(默认)模式或串行flash编程MCU在CS(EzPort)模式而退出复位状态。
详见启动选项。
6.2 复位此部分讨论基本的复位机制和复位源。
一些引发复位的模块可以配置为触发中断。
参见各独立外设章节获取更多信息。
6.2.1 上电复位(POR)当给MCU上电或提供的电压低于上电复位重置电压(V POR)时,POR电路会触发POR 复位。
当电压升高时,LVD电路保持MCU处于复位状态直到电压大于LVD低电压阈值(V LVDL)。
POR复位后SRSL寄存器的POR和LVD位亦重设。
6.2.2 系统复位MCU复位是一种可以使芯片回到初始状态的方法。
系统复位起始于全面监管的片上调节器和来自于内部参考的系统时钟发生器。
当芯片退出复位时,它按如下顺序操作:·从中断向量表0偏移开始读取开始SP(SP_main)·从中断向量表4偏移开始读取PC·LR设置为0xFFFF_FFFF片上外设模块和非模拟IO引脚最初都被置为禁止。
复位之后模拟引脚被默认为相应的模拟功能。
复位时,JTAG相应的输入引脚被配置为:·TDI上拉(PU)·TCK下拉(PD)·TMS上拉相应的输出引脚被配置为:TDO既不上拉也不下拉注意到nTRST初始被配置为禁止的,然而一旦被配置为JTAG功能时,它的相应输入引脚被配置为:·nTRST上拉6.2.2.1 外部引脚复位(PIN)RESET是一个专用引脚。
该引脚开漏和内部上拉。
RESET将芯片从任何模式唤醒。
在该引脚复位时,SRSL[PIN]被置位。
6.2.2.1.1复位引脚过滤RESET引脚在所有的模式中都支持数字过滤。
PS-010

PS-010前端信号处理板技术说明书1. 概述:PS-010 前端信号处理板是与我所研制的PC-6360 模入接口卡配套使用的前端信号处理板和多通道次级板。
本板装有16 路双端输入通道及接线端子。
通过带缆串级联接,一块PC-6360模入接口卡最多可扩展至128路双端输入通道( 8块PS-010板)。
本板上的高性能仪用放大器可提供1~1000倍( 8档,硬件选择)的放大增益,或用户自定的增益。
本板还具有滤波、电流电压变换等信号处理功能供用户选用。
PS-010前端信号处理板特别提供了冷端补偿(CJC)电路,使本板尤其适用于热电偶测温系统的信号处理。
2. 主要技术指标:2.1 输入通道数:双端16路2.2 输入电压范围:最大±10V,由放大器增益确定输入条件:增益共模抑制比非线性度稳定时间最大输入电压1000 120dB 0.005 0.075mS ± 10mV100 120dB 0.005 0.025mS ± 100mV10 105dB 0.010 0.015mS ± 1V1 75dB 0.015 0.015mS ± 10V2.3 输入过压保护范围:持续±30V2.4 输入共模电压:最大±10V2.5 输出电压:最大±10V2.6 输出电流:最大5mA2.7 冷端补偿输出电压:+24.4mV/℃ ( 0℃时为0V )2.8 冷端补偿误差:最大±0.5℃2.9 电源功耗:±5V(±10%) ≤ 200mA (不使用主机±12V电源)±12V(±10%) ≤ 30mA (使用主机±12V电源)2.10 使用环境要求:工作温度:0℃~40℃相对湿度:40%~80% RH存贮温度:-55℃~+85℃2.11 外型尺寸:长×宽=205mm×114mm ( 8.1英寸×4.5英寸 )3. 安装与设置:3.1 启封与初检:PS-010 前端信号处理板在销售前都经过仔细的调整与检查。
力扬PLC操作手册CH06
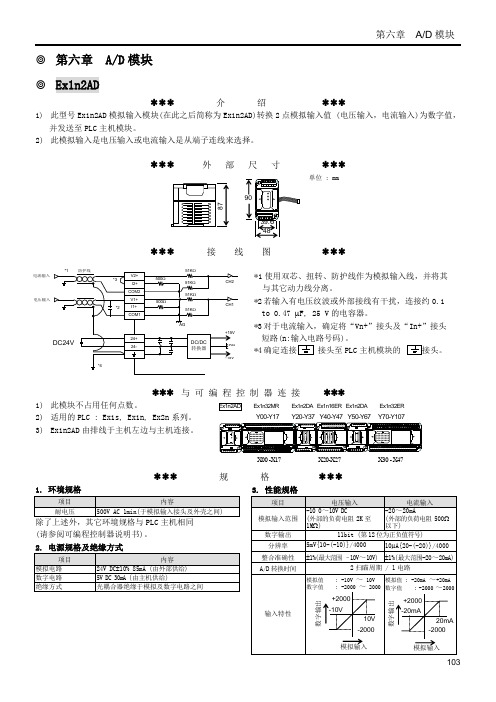
第六章 A/D 模块 Ex1n2AD←←← 介 绍←←←1) 此型号Ex1n2AD 模拟输入模块(在此之后简称为Ex1n2AD)转换2点模拟输入值 (电压输入,电流输入)为数字值,并发送至PLC 主机模块。
2) 此模拟输入是电压输入或电流输入是从端子连线来选择。
←←← 外 部 尺 寸←←←单位 : mm←←← 接 线 图←←←←←← 与 可 编 程 控 制 器 连 接←←←1) 此模块不占用任何点数。
2) 适用的PLC : Ex1s, Ex1n, Ex2n 系列。
3) Ex1n2AD 由排线于主机左边与主机连接。
←←← 规 格←←←(请参阅可编程控制器说明书)。
电流输入电压输入X00 -X17 X20-X27 X30 - X47*1使用双芯、扭转、防护线作为模拟输入线,并将其与其它动力线分离。
*2若输入有电压纹波或外部接线有干扰,连接约0.1 to 0.47 μF, 25 V 的电容器。
*3对于电流输入,确定将“Vn+”接头及“In+”接头短路(n:输入电路号码)。
*4确定连接 接头至PLC 主机模块的 接头。
←←← 范 例 程 式←←←♦电压模式 M8002 [MOV K0 D8120] 使能模拟模块 M8000 (M8112) : 选择CH1 (M8110) : 电压模式M8110=0CH1数字值是由模拟值转换而来并储存在D8112。
CH1实际电压输入 = 10V ⨯ (D8112/2000) CH2实际电压输入 = 10V ⨯ (D8113/2000)若数字值欲直接以–10,000V ~+10,000V 的范围内显示,由下述程序转换。
D100 = 10,000 ⨯ (D8112或D8113) ÷ 2000♦电流模式M8002[MOV K0 D8120] 使能模拟模块M8002[MOV K0 D8114] : CH1 offset 值M8000(M8112) : 选择CH1(M8110) : CH1为电流模式,M8110=1CH1数字值是由模拟值转换而来并储存在D8112。
计算机二级C语言_第3章输入输出函数
横向跳格(跳向下一输出区)(8列)
竖向跳格
后退一格
回车(回本行第一列)
走纸换页
输出反斜杠字符
输出单引号字符
1到3位8进制数所代表的字符
1到2位16进制数所代表的字符
printf函数举例
#include <stdio.h>
main() {int a=29; long b=123456; double x=123.456; char c=':';
首地址。
&:取地址符 格式: &变量名
➢ 一般格式
scanf (“格式控制字符串”,变量1的地址,变量2的地址,…,变量n的地 址);
➢ 格式控制符与后续参数中的变量地址的对应关系
已 知: int a , b; 函数调用: scanf ("%d%d", &a , &b); 假设输入: 10□20↙ 变量的值: a的值是10,b的值是20
格式
1、%s 按字符串的实际长度输出。 printf("%s","china");
china 2、%ms 输出的字符串占m列。
printf("%3s,%7s","china","china"); china,△△china 1.当字符串实际长度>m,则按实际长度输出。 2.当字符串实际长度≤m 。则左端补空格。 3、%-ms 输出的字符串占m列。 printf("%3s,%-7s","china","china"); china,china △△ 1.当字符串实际长度>m,则按实际长度输出。 2.当字符串实际长度≤m 。则右端补空格。
Ch06-标准化和一致性管理

• 全面管理与工程实施
软件过程改进方法与实践案例
王安生
洛克希德马丁的标准建立与剪裁
LM 企业政策 ANS/EIA-632 ISO 9001:2000 CMMI 1.1 ISO/IEC-12207 LM-硬件过程 标准 ISO/IEC-15288 IEEE 1220 公共标准源 项目特定标准 行业标准 信息 参考 政府标准 领域特定标准 领域特的标准 LM-IEP 标准 组织层面 的标准 过程 EPI:工程过程改进 标准过程 集成方法 集成工作 产品
– 具体的过程任务的生产效率和质量特性,可以用来评 估任务的效率,标识过程改进中最需要处理的领域。
软件过程改进方法与实践案例
王安生
过程库中收集的常用数据
数据类型 软件规模 Software size 工作量 成本 同行评审的覆盖率 度 量 元 Line of Code(LOC代码行) Normalized Line of Code (规范化代码行) 按各阶段统计的工作量 按各阶段统计的成本 例如,评审的需求文档数/总的需求文档数 * 100 % 计划的 实际的
RI = Requirements Incorrect(需求不准确)
DH = DE = Data Handling Error(数据处理错误) Design Error(设计错误) IN = Interface Error(接口错误) DB = Data Base error(数据库错误) CL = Clerical Error(书写错误) OT = Other
关键过程域
分类 等级 管 理 类 组 织 类 技术更改管理(TCM) 过程更改管理(PCM) 定量过程管理(QSM) 集成软件管理(ISM) 组间协调(IC) 组织过程焦点 (OPF) 组织过程定义 (OPD) 培训大纲(TP) 缺陷预防(DP) 软件质量管理(SQM) 软件产品工程(SPE) 同行评审(PR) 工 程 类
数字控制器CH系统操作手册
产品说明:数字控制器CH系统操作手册1.产品型号说明CH□02□□□□-□□*□□-□□①② ③④⑤ ⑥⑦ ⑧9① 控制:F:PID动作及自动计数(逆向动作) D:PID动作及自动计数(直接动作)② 输入方式③范围代码:参考8输入范围表*④第一控制输出(OUT1)(加热侧):M:继电器输出 T:三端双向可控开关 V:电压脉冲 B:电流(4到20毫安直流)G:过零(用于三端双向可控驱动)⑤第二控制输出(OUT2)(制冷侧)⑥警报输出[ALM1]N:没有警报 A:高偏差警报 B:低偏差警报 C:偏差高/低警报 D:联合警报 E:高偏差警报并持续F:低偏差警报并持续 G:偏差高/低警报并持续 H:高进度警报 L:低进度警报并持续 J:低进度警报K:高进度警报并持续7:警报输出[ALM1]N:没有警报 A:高偏差警报 B:低偏差警报 C:偏差高/低警报 D:联合警报 E:高偏差警报并持续F:低偏差警报并持续 G:偏差高/低警报并持续 H:高进度警报 L:低进度警报并持续 J:低进度警报K:高进度警报并持续8:交流功能:N:无交流功能 5:RS-485(2-线系统)9:防水防尘结构:N:无防水/防尘结构 1:防水/防尘结构2.安装2.1 安装条件※ 环境温度不低于0度或不超过50度※ 环境湿度不低于45%或不超过85%RH※ 无腐蚀或易燃气体。
※ 无水、油、化学品、蒸汽飞溅的地方※ 无过多感应燥音,静电,磁场。
※ 无热凝聚形成热辐射2.2 尺寸3.警告3.1 接线注意事项(1)对于热电偶输入的,使用特定的补偿线。
(2)对于热电阻输入的,使用低电阻线,并且三个线头间不带电阻差。
(3)将输入信号线绕开仪表电源,电气设备电源及负荷线以防止燥音感应。
(4)对于电流输入,必须由输入端提供一个250欧的电阻器(±0.02%±10ppnm, 0.25W)。
3.2 仪表接线电源供给电压:90至264V交流电50/60HZ 、≤7W警报输出等级:继电器联接输出:250伏交流电,1安(电阻性负载)控制输出等级:继电器联接输出:250伏交流电,3安(电阻性负载)电压脉冲输出:0/12伏直流电(负荷电阻600欧或更多)电流输出:4至20MA直流电(负荷电阻600欧或更少)过零输出(用于三端双向控制驱动):过零触发用4.面板说明1)所测数值(PV)显示单元:显示所测得的数值(PV)、显示仪表的不同参数标记2)设置数值(SV)显示单元:显示设置的数值(SV)、显示仪表的不同设置参数3)指示灯**自动整定指示灯(AT),在自动整定时闪烁控制输出指示灯(OUT1),在控制输出打开时亮警报输出指示灯(ALM1),在警报时亮辅助输出指示灯(OUT2),在辅助输出打开时亮4)设置键(SET):用于输入/调出参数,按二秒以上可以读出表二数据5)转换和R/S键(R/S):在设置改变时转换数字(转换键),用于选择运行/停止功能6)下降键:用于降低数字7)上升键:用于升高数字5.显示模式状态5.1每个模式的开启程序打开电源→显示输入方式→显示输入范围(大约显示4秒钟)→如果按键后没有反应的时间超过1分钟,仪表回复到PV/SV 显示模式状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CH06 输入输出控制习题与思考题1.CPU与外设之间的数据传输控制方式有哪几种?何谓程序控制方式?它有哪两种基本方式?请分别用流程图的形式描述其处理过程。
解答:CPU与外设之间的数据传输控制方式有三种:程序控制方式、中断方式、DMA方式。
程序控制方式:程序方式就是指用程序来控制进行输入输出数据传输的方式。
程序控制方式的两种基本方式:无条件程序控制方式,条件程序控制方式;流程图:2.采用用查询方式将数据区DATA开始的100个字节数据在FCH端口输出,设状态端口地址为FFH,状态字的D0位为1时表示外设处于“忙”状态。
试编写查询程序。
解答:DA TA SEGMENTBUFF DB 100 DUP(?)DA TA ENDSCODE SEGMENTASSUME CS:CODE,DS:DATASTART:MOV AX,DATAMOV DS,AXMOV BX,OFFSET BUFF;送缓冲区指针MOV CX,100;送计数初值WAIT1:IN AL,0FFH;查询状态,若为1,则等待TEST AL,01HJNZ WAIT1MOV AL, [BX]OUT 0FCH, AL ;输出一个数据INC BXLOOP WAIT1MOV AH,4CHINT 21HCODE ENDSEND START3.何谓中断优先级,它对于实时控制有什么意义?有哪几种控制中断优先级的方式?解答:当系统中有多台设备(即多个中断源)同时提出中断请求时,就有先响应谁的问题,也就是如何确定优先级的问题。
一般来讲,CPU总是先响应具有较高优先级的设备。
解决优先级问题的方法一般有三种:软件查询法、简单硬件方式和专用硬件方式。
4.什么叫DMA传送方式? 其主要步骤是什么?试比较DMA传输、查询式传输及中断方式传输之间的优缺点和适用场合?解答:在DMA方式下,外部设备利用专门的接口电路直接和存储器进行高速数据传送,而不需经过CPU,数据传输的速度基本上取决于外设和存储器的速度,传输效率大大提高。
DMA主要步骤:一般来说,完成一次DMA传输的主要步骤为:(1)当外设准备就绪时,它向DMA控制器发DMA请求,DMA控制器接到此信号后,经过优先级排队(如需要的话),向CPU发DMA请求(送至CPU的HOLD引脚)。
(2)CPU在完成当前总线周期后会立即对DMA请求做出响应。
CPU的响应包括两个方面:一方面将控制总线、数据总线和地址总线置高阻,另一方面将有效的HLDA信号加到DMA控制器上,以此来通知DMA控制器,CPU已经放弃了对总线的控制权。
(3)DMA控制器收到HLDA信号后,即取得了总线控制权。
这时,它往地址总线上发送地址信号(指出本次数据传输的位置),同时,发出相应的读/写信号(决定是进行输入还是输出操作)。
(4)每传送一个字节,DMA控制器会自动修改地址寄存器的内容,以指向下一个要传送的字节。
同时,修改字节计数器的内容,判别本次传输是否结束。
(5)当字节计数器的值达到计数终点时,DMA过程结束。
DMA控制器通过使HOLD 信号失效,撤消对CPU的DMA请求。
CPU收到此信号,一方面使HLDA无效,另一方面又重新开始控制总线,实现正常的运行。
程序方式的特点:使用方便,系统开销不大,但速度较慢。
适用于设备不多且实时响应要求不高的小系统。
中断方式:CPU与外设之间可以并行工作,因此大提高CPU的工作效率,但一系列的保护(恢复)现场的工作,仍要花费不少CPU的时间。
适用于设备较多且实时响应要求较高的系统。
DMA方式:需要增加DMA控制器,适用于大量高速的数据传送。
5.什么是中断向量?中断向量表的功能是什么?已知中断源的中断类型码分别是84H和FAH,它们所对应的中断向量分别为:2000H:1000H, 3000H:4000H, 这些中断向量应放在中断向量表的什么位置?如何存放?编程完成中断向量的设置。
解答:中断向量----中断服务程序的入口地址;中断向量表----存放中断向量的表,中断向量与中断类型码有对应关系。
84H的位置:210H~213H;FAH的位置:3E8H~3EBH0000:210H 00 10 00 200000:3E8H 00 40 00 30PUSH DSMOV DX,2000HMOV DS,DXMOV DX,1000HMOV AL,84HMOV AH,25HINT 21H;MOV DX,3000HMOV DS,DXMOV DX,4000HMOV AL,0FAHMOV AH,25HINT 21HPOP DS6.试结合8086/8088CPU可屏蔽中断的响应过程,说明向量式中断的基本处理步骤。
解答:⑴接口发中断请求信号(中断请求),若有中断优先级判别,进行判优;⑵当前指令执行完后,CPU进行中断回答(中断响应);⑶中断类型号N送CPU;⑷当前的PSW、CS、IP推入堆栈;⑸清除IF和TF;⑹(4*N)作为IP,(4*N+2)作为CS;⑺中断子程序执行(中断服务);⑻开中断;⑼IRET指令使IP、CS和PSW弹出堆栈;⑽返回被中断的程序(中断返回)。
7.在中断响应总线周期中,第一个INTA脉冲向外部电路说明什么?第二个INTA脉冲呢?解答:第一个INTA脉冲----·使IRR的锁存功能失效。
(目的是防止此时再来中断导致中断响应的错误),到第二个INTA时恢复有效。
·使ISR的相应位置位,表示已为该中断请求服务。
·使IRR相应位清0。
第二个INTA脉冲----·送中断类型码,中断类型码由用户编程和中断请求引脚的编码共同决定,详见编程部分。
·如果8259A工作在中断自动结束方式,则此时清除ISR的相应位。
8.中断处理的主要步骤有哪些?试说明每一步的主要动作。
9.如果8259A按如下配置:不需要ICW4,单片,中断请求边沿触发,则ICW1的值为多少?。
如要求产生的中断类型码在70H~77H之间,则ICW2的值是多少?解答:ICW1=×××1 0×10B;ICW2=0111 0×××B10.在上题中,假设8259A的端口地址为00H和01H,采用中断自动结束,固定优先级,完成对该8259A的初始化。
解答:初始化程序如下。
MOV AL,×××1 0×10B;OUT 00H,AL;ICW1MOV AL,0111 0×××B;OUT 01H,AL;ICW2(MOV AL,0000 0×11B;ICW4OUT 01H,AL;前提ICW1=×××1 0×11B)MOV AL,00HOUT 00H,AL;OCW211.如果8259A用在80386DX系统中,采用一般的EOI,缓冲模式,主片,特殊全嵌套方式,则ICW4的值是什么?解答:ICW4=0001 1101B12.如果OCW2等于67H,则允许何种优先级策略?为什么?解答:67H=0110 0111B,固定优先级。
13.某系统中CPU为8088,外接一片8259A作为中断控制器,五个中断源分别从IR0~IR4以脉冲方式引入系统,中断类型码分别为48H~4CH,中断服务子程序入口的偏移地址分别为2500H,4080H,4C05H,5540H和6FFFH,段地址均是2000H,允许它们以非中断自动结束方式,固定优先级工作,请完成:①画出硬件连接图,写出此时8259A的端口地址;中断源A7A6A5A4A3A2A1②编写8259A的初始化程序,(包括对中断向量表的设置)。
解答:①②;中断向量表的设置PUSH DSMOV DX,2000HMOV DS,DXMOV DX,2500HMOV AX,2548HINT 21HMOV DX,4080HMOV AX,2549HINT 21HMOV DX,4C05HMOV AX,254AHINT 21HMOV DX,5540HMOV AX,254BHINT 21HMOV DX,6FFFHMOV AX,254CHINT 21HPOP DS;8259的初始化MOV AL,×××1 0×11B(13H);送ICW1,所有×的位全取0OUT 20H,ALMOV AL,48H ;送ICW2,即中断类型码的高5位OUT 21H,ALMOV AL,000×××01B(01H) ;送ICW4,所有×的位全取0OUT 21H,ALMOV AL,1110 0000B(E0H);送OCW1OUT 21H,AL14.某系统中设置两片8259A级联使用,从片接至主片的IR2,同时,两片芯片的IR3上还分别连接了一个中断源,要求电平触发,普通EOI结束。
编写全部的初始化程序。
(端口地址可用自定)解答:主片从片;8259的初始化(主片)MOV AL ,×××1 1×01B (19H ) ;送ICW 1,所有×的位全取0 OUT 20H ,ALMOV AL ,40H ; 送ICW 2,即中断类型码的高5位 OUT 21H ,ALMOV AL ,0000 0100B ; 送ICW 3 OUT 21H ,ALMOV AL ,0001 ××01B ;送ICW 4,所有×的位全取0OUT 21H ,ALMOV AL,1111 0011B (F3H );送OCW1 OUT 21H,AL;8259的初始化(从片)MOV AL ,×××1 1×01B (19H ) ;送ICW 1,所有×的位全取0 OUT 20H ,ALMOV AL ,48H ; 送ICW 2,即中断类型码的高5位 OUT 21H ,ALMOV AL ,×××× ×010B (02H ) ; 送ICW 3 OUT 21H ,ALMOV AL ,0000 ××01B ;送ICW 4,所有×的位全取0OUT 21H ,ALMOV AL,1111 0111B (F7H );送OCW1 OUT 21H,AL15.设8253的通道2工作在计数方式,外部事件从CLK 2引入,通道2计满500个脉冲向CPU 发出中断请求,CPU 响应这一中断后重新写入计数值,开始计数,以后保持每2秒钟向CPU发出一个中断请求。
假设条件如下:①外部计数事件频率为1kHz;②中断类型码为54H;试完成硬件连接图并编写完成该任务的全部程序(包括芯片的初始化,中断向量的设置,中断服务子程序)。