自动控制原理西安交通大学张爱民
西安交通大学招收硕士学位研究生初试参考书目

测试技术
《机械工程测量与试验技术》机械工业出版社2004年版黄长艺,《机械工程测试技术》机械工业出版社2002年版陈花玲
804
材料科学基础
《材料科学基础》机械工业出版社2006年第二版石德珂
805
工程热物理基础(流体力学或传热学或工程热物理任选一门)
《流体力学》西安交通大学出版社2001年景思睿等,《工程热力学》高等教育出版社2001年沈维道,《传热学》高等教育出版社1998年版陶文铨
707
教育学与运动训练学
《运动训练学》全国体育学院通用教材人民体育出版社2000年田麦久,《教育学》人民教育出版社1999年王道俊等,《运动训练学》人民体育出版社
708
文学概论
《西方文学理论史》高等教育出版社2002年马兴国,《文学理论教程》高等教育出版社1998年童庆炳,《中国古代文学理论批评史》北京大学出版社2001年张少康,
2010年西安交通大学招收硕士学位研究生初试参考书目(复试参考书见招生目录备注栏)
科目代码
科目名称
参考书目
256
日语(二外)
《标准日本语》初级(上、下)2005版,中级(上册)1990版人民教育出版社
257
俄语(二外)
《东方俄语》(1-2册)外语教学与研究出版社2003年9月丁树杞
258
德语(二外)
845
经济学
《微观经济学》(第四版)中国人民大学出版社2000年版平狄克、鲁宾费尔德,《宏观经济学》(第五版)中国人民大学出版社2005年版曼昆
846
管理学基础
《管理学》上海人民出版社2005年高等教育出版社1988年尤叙球、包世华,《结构力学》(上、下册)高等教育出版社(第四版)杨弗康
《自动控制原理》张爱民课后习题标准答案

(4)空调制冷:闭环系统输入量:设定的温度输出量:实际的温度
1.2解:
开环系统:优点:结构简单,成本低廉;增益较大;对输入信号的变化响应灵敏;只要被控对象稳定,系统就能稳定工作。
缺点:控制精度低,抗扰动能力弱
闭环控制优点:控制精度高,有效抑制了被反馈包围的前向通道的扰动对系统输出量的影响;利用负反馈减小系统误差,减小被控对象参数对输出量的影响。
1.5解
不正确。引入反馈后,形成闭环控制系统,输出信号被反馈到系统输入端,与参考输入比较后形成偏差信号,控制器再按照偏差信号的大小对被控对象进行控制。在这个过程中,由于控制系统的惯性,可能引起超调,造成系统的等幅振荡或增幅振荡,使系统变得不稳定。所以引入反馈之后回带来系统稳定性的问题。
1.6
解:
对自动控制系统的基本要求是:稳定性、快速性和准确性。
闭环控制系统的特点:
(1)闭环控制系统是利用负反馈的作用来减小系统误差的
(2)闭环控制系统能够有效地抑制被反馈通道保卫的前向通道中各种扰动对系统输出量的影响。
(3)闭环控制系统可以减小被控对象的参数变化对输出量的影响。
1.4解
输入量:给定毫伏信号
被控量:炉温
被控对象:加热器(电炉)控器:电压放大器和功率放大器经比较,电气系统(a)与机械系统(b)的微分方程具有相同的形式,故两个系统为相似系统。
2.4解
传递函数
微分方程
2.5解
由电路得:
(1)
(2)
综合(1)、(2)式,消去变量u,可得其传递函数为:
进而得其微分方程为
2.6解
对系统中各个部分建立相应的微分方程如下:
自动控制原理张爱民

自动控制原理张爱民自动控制原理。
自动控制原理是现代控制工程中的基础课程,它主要研究自动控制系统的基本原理和方法。
自动控制系统是利用控制器对被控对象进行调节,使其输出符合要求的系统。
自动控制原理的学习对于掌握控制工程的基本理论和方法具有重要意义,也是掌握现代工程技术的基础。
自动控制原理的研究对象包括连续系统和离散系统。
连续系统是指系统的状态和控制信号是连续变化的,比如机械系统、电气系统等;离散系统是指系统的状态和控制信号是离散变化的,比如数字控制系统等。
掌握连续系统和离散系统的基本原理,对于理解和设计自动控制系统至关重要。
自动控制原理主要包括控制系统的建模、系统的稳定性分析、系统的性能指标、控制器的设计等内容。
控制系统的建模是指将实际系统抽象成数学模型,以便进行分析和设计。
系统的稳定性分析是指研究系统在外部扰动下的稳定性问题,以保证系统能够稳定工作。
系统的性能指标是指衡量系统性能好坏的指标,比如超调量、调节时间、静态误差等。
控制器的设计是指根据系统的性能指标和稳定性要求,设计出满足要求的控制器。
自动控制原理的学习需要掌握数学、物理、电子等多个学科的知识。
数学是自动控制原理的基础,包括微积分、线性代数、概率论等内容。
物理是自动控制原理的应用基础,包括力学、电路等内容。
电子是自动控制原理的工程基础,包括电子线路、数字信号处理等内容。
掌握这些基础知识,才能够深入理解自动控制原理的内容。
在实际工程中,自动控制原理被广泛应用于各种控制系统中,比如工业生产、航空航天、交通运输等领域。
掌握自动控制原理,可以帮助工程师设计出稳定性好、性能优越的控制系统,提高系统的自动化水平,提高工作效率,降低成本,提高生产质量。
总之,自动控制原理是现代控制工程中的基础课程,它对于掌握控制工程的基本理论和方法具有重要意义。
通过学习自动控制原理,可以掌握控制系统的建模、稳定性分析、性能指标、控制器设计等内容,为工程技术人员提供了强有力的工具,帮助他们设计出稳定性好、性能优越的控制系统,提高工作效率,降低成本,提高生产质量。
张爱民《自动控制原理》
张爱民《自动控制原理》1. 引言《自动控制原理》是由张爱民教授编写的一本介绍自动控制理论和方法的教材。
自动控制是现代工程和科学领域中的一个重要学科,涉及到各个领域的控制问题,包括机械、电气、电子、通信等。
2. 作者简介张爱民,清华大学自动化系教授,是自动控制领域的知名专家。
他在自动控制理论和应用方面做出了很多重要贡献。
他主持和参与了多项国家级科研项目,在自动控制领域发表了大量论文。
张爱民教授的《自动控制原理》以其深入浅出的讲解风格和丰富的实例深受学生和教师的喜爱。
3. 内容概述《自动控制原理》一书共分为八章,内容涵盖了自动控制领域的基础理论和实践方法。
下面对每一章的主要内容进行简要介绍。
3.1 第一章:自动控制概述这一章介绍了自动控制的基本概念、分类和发展历程。
通过一些实例,帮助读者理解自动控制的重要性和应用领域。
3.2 第二章:数学基础在自动控制领域,数学是基础。
这一章主要介绍了自动控制所涉及到的数学基础,包括线性代数、微积分和概率论等。
读者可以通过这一章的学习,为后续章节打下坚实的数学基础。
3.3 第三章:系统建模系统建模是自动控制的第一步。
这一章介绍了系统建模的基本概念和方法,包括系统的描述、状态空间分析和传递函数表示等。
通过实例,读者可以学会如何将实际问题转化为数学模型。
3.4 第四章:传递函数的表示与分析传递函数是自动控制中常用的数学工具。
这一章详细介绍了传递函数的定义、性质和常见的运算规则。
同时,还介绍了用传递函数进行系统分析和设计的方法。
3.5 第五章:控制器的设计控制器是自动控制中的核心组成部分。
这一章主要介绍了控制器的设计方法,包括比例控制器、积分控制器和PID控制器等。
通过实例,读者可以学会如何选择和设计合适的控制器。
3.6 第六章:闭环控制系统分析闭环控制系统是自动控制中常用的控制方式。
这一章详细介绍了闭环控制系统的分析方法,包括系统的稳定性分析和性能指标的评价等。
读者可以通过这一章的学习,了解闭环控制系统的优势和局限性。
自动控制原理(西安交通大学张爱民)第3章

y()
或
0.02 y()
y() 2
0
td tr tp
t ts
在上述几种性能指标中,t p , tr , ts表示瞬态过程进行的快慢,是 快速性指标;而 %,N 反映瞬态过程的振荡程度,是振荡性指
标。其中 %和 ts 是两种最常用的性能指标。
3.1.3 瞬态过程的性能指标(单调变化)
(二)单调变化的响应 单调变化响应曲线如图所示:
瞬态过程中输出响应的最大值
超过稳态值的百分数。 % ymax y() 100 % y()
0
tp
t
ts
式中:ymax —输出响应的最大值; y() lim y(t) —稳态值; t
⒌ 调节时间或过渡过程时间 ts :
当 y(t) 和 y()之间的误差达到规定的范围之内[一般取 y()
的±5%或±2%,称允许误差范围,用表示]且以后不再
3.2 一阶系统的瞬态响应
3.2.1 3.2.2 3.2.3 3.2.4 3.2.5 3.2.6 3.2.7
一阶系统的数学模型 一阶系统的单位脉冲响应 一阶系统的单位阶跃响应 一阶系统的单位斜坡响应 一阶系统的单位加速度响应 一阶系统的瞬态性能指标 减小一阶系统时间常数的措施
3.2.1 一阶系统的数学模型
3.2.3 一阶系统的单位阶跃响应--特点
y(t) 1
1 曲线1 时间常数为T
2 曲线2 时间常数为2T
0
t
单位阶跃响应曲线是单调上升的指数曲线,为非周期响 应; 时间常数T反映了系统的惯性,时间常数T越大,表示系 统的惯性越大,响应速度越慢,系统跟踪单位阶跃信号越慢, 单位阶跃响应曲线上升越平缓。反之,惯性越小,响应速度 越快,系统跟踪单位阶跃信号越快,单位阶跃响应曲线上升 越陡峭。由于一阶系统具有这个特点,工程上常称一阶系统 为惯性环节或非周期环节。
自动控制原理西安交通大学张爱民238页PPT

1、最灵繁的人也看不见自己的背脊。——非洲 2、最困难的事情就是认识自己。——希腊 3、有勇气承担命运这才是英雄好汉。——黑塞 4、与肝胆人共事,无字句处读书。——周恩来 5、阅读使人充实,会谈使人敏捷,写作使人精确。——培根
自动控制原理西安交通大学 张爱民
31、别人笑我太疯癫,我笑他人看不 穿。(名 言网) 32、我不想听失意者的哭泣,抱怨者 辛勤耕 耘,忍 受苦楚 。我一 试再试 ,争取 每天的 成功, 避免以 失败收 常在别 人停滞 不前时 ,我继 续拼搏 。
33、如果惧怕前面跌宕的山岩,生命 就永远 只能是 死水一 潭。 34、当你眼泪忍不住要流出来的时候 ,睁大 眼睛, 千万别 眨眼!你会看到 世界由 清晰变 模糊的 全过程 ,心会 在你泪 水落下 的那一 刻变得 清澈明 晰。盐 。注定 要融化 的,也 许是用 眼泪的 方式。
35、不要以为自己成功一次就可以了 ,也不 要以为 过去的 光荣可 以被永 远肯定 。
《自动控制原理》张爱民课后习题答案

M (t) kmi f (t)
d 2 (t ) d (t)
J dt 2
f dt
M (t )
其中 km 为磁控式电动机转矩系数,令初始条件为零,作拉氏变换得:
i ( S ) o S( )k1 U eS( ) k2U e( S ) I f S( R) f L If Sf ( S )
( S ) N1 o S( ) N2
差信号为零, 电动机不动, 调压器的滑动触点停留在某个合适的位置上。 此时, 炉子散失的
热量正好等于从加热器获取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉温由于某种原因突然下降时, 热电偶的输出电压下降, 与给定电压比较后形成正偏差
信号, 该偏差信号经过电压放大器、 功率放大器放大后, 作为电动机的控制电压加到电动机
diq dt
u 34 =u
d =(R
a
+R
d )i
d
+(L
a
+L
d
)
di d dt
u a = R d i d +L d
di d dt
d2 d T m dt 2 + dt =k 1 u a
对上面各式拉氏变换并整理得到:
I c (s)
I q (s)
I d (s) U a ( s)
(s)
1 U c (s)
开环系统: 优点:结构简单,成本低廉;增益较大;对输入信号的变化响应灵敏;只要被
控对象稳定,系统就能稳定工作。
缺点:控制精度低,抗扰动能力弱
闭环控制
优点: 控制精度高, 有效抑制了被反馈包围的前向通道的扰动对系统输出量的
影响;利用负反馈减小系统误差,减小被控对象参数对输出量的影响。
西安交通大学硕士研究生入学考试科目主要参考书

高等教育出版社
2004 年第六版 2008 年第二版
《生物化学》
查锡良
人民卫生出版社 2008 年第七版
722 量子力学
《量子力学教程》
周世勋
人民教育出版社 1979 年版
西安交通大学 硕士研究生入学考试科目主要参考书
邮政编码:710049
地部门:研究生招生办公室
电话:029-82668329
联 系 人:肖胜利
考试科目代码及名称
参考书名称
723 物理化学
《物理化学》上、下册
作者
付献彩
出版社
高等教育出版社
版次
2002 年
备注
724 中共党史
《中国共产党七十年》
胡绳
《工业设计思想基础》
702 数学分析
《数学分析》
陈高翔
贺忠厚 邓晓兰 铁卫 冯宗宪 (美)萨尔瓦多 樊秀峰 张迈曾主编
李彬主编
中国经济出版社 西安交通出版社 西安交大出版社 西安交大出版社
高等教育出版社 清华大学出版社 西安交大出版社 西安交通大学出版 社 新华出版社
2004 年
2007 年 2007 年 2007 年 2011 年 2010 年 2003 年
方梦之
青岛出版社
2003 年版
《医学英汉互译技巧与实践》
罗磊
人民军医出版社 2004 年版
《医学专业英语》阅读 1-2 册
白永权
人民卫生出版社 2000 年版
《英汉翻译教程》
杨士焯
北京大学出版社 2006 年版
359 日语翻译基础
《现代日汉翻译教程》
第一章 自动控制的一般概念
5
自动控制的基本原理
第一节 自动控制的基本原理
[自动控制]:在无人参与的情况下,利用外加的设备或装置使 整个生产过程或工作机械自动地按预定规律运行,或使其某个 参数按预定的要求变化。 以水位控制系统为例说明自动控制的基本原理:见教材 中图1-1(人工控制)和图1-2(自动控制)。 人工控制系统控制水位的过程:1、观察实际水位;2、与 人工控制系统控制水位的过程: 、观察实际水位; 、与 要求水位比较,得出偏差;3、根据偏差的大小和方向人工调 节进水阀的开度,以保证要求的水位。 此系统中,水池是被控对象,实际水位是被控量。 由于人的反应速度和力量的局限性,控制效果往往是不理 想的。 6
的扰动, 由负载扰 控制。
Sunday, October 03, 2010
15
自动控制系统的种类
4. “转速控制系统”之“复合控制系统”
+
ug
大 器
放 功
uf
ue
放
放
ua
大 器
n
M
ub
速
i
ug
ue
1 4
ub
5 2
ua
6 3
n
-
uf
1 5 6 扰动控制 控制
2 控制
3 偏差控制 控制
4
速 控制
Sunday, October 03, 2010
Sunday, October 03, 2010
19
自动控制系统的研究内容和对系统的基本要求
第三节 自动控制系统的研究内容和对系统的基本要求
研究内容有二:一为系统分析,二为系统的设计(包括 系统综合) 系统分析:已知系统的结构和参数,研究它在某种 典型输入信号作用下,被控量变化的全过程。从这个变 化过程得出其性能指标,并讨论性能指标和系统的结构、 参数的关系。 系统设计:寻求一个能完成一定控制任务,满足一 定控制要求的控制系统。 系统综合:控制系统设计好后,即控制系统的主要元 件和结构确定后,为了满足系统的性能指标,需要改变 控制系统的某些参数或结构或附加某种装置。这个过程 称为系统的校正或系统的综合。
自动控制原理_西安交通大学中国大学mooc课后章节答案期末考试题库2023年
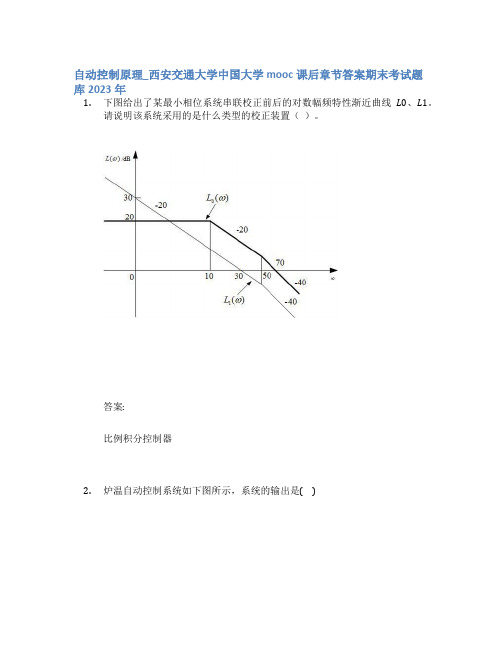
自动控制原理_西安交通大学中国大学mooc课后章节答案期末考试题库2023年1.下图给出了某最小相位系统串联校正前后的对数幅频特性渐近曲线L0、L1。
请说明该系统采用的是什么类型的校正装置()。
答案:比例积分控制器2.炉温自动控制系统如下图所示,系统的输出是( )答案:实际炉温3.系统特征方程为,使系统稳定的T的取值范围是()答案:T>654.开环传递函数,则实轴上的根轨迹为()答案:5.液位控制系统原理图如下图所示,系统的给定输入是()答案:期望液位6.如图所示反馈控制系统的典型结构图,=( )答案:7.已知最小相位系统的渐近幅频特性曲线如图所示,则系统传递函数为( )答案:8.液位控制系统原理图如下图所示,被控对象是()答案:水池9.已知单位反馈系统的开环传递函数为,当输入为单位阶跃函数时,系统的稳态误差为()答案:3/510.开环频域性能指标中的相角裕度对应时域性能指标()答案:超调%11.高阶系统的开环传递函数为:,则系统输入单位斜坡信号,系统的稳态误差为( )答案:1.512.在对某最小相位系统进行串联校正设计时,校正前后对数幅频特性渐近线分别如下图中曲线L0、L1所示。
请说明校正环节采用的是什么类型的校正装置及在单位斜坡输入下稳态误差的影响。
()答案:相位超前,增加13.校正环节是校正()答案:超前14.液位控制系统原理图如下图所示,系统的无差度阶数是()答案:115.系统的传递函数为,则当从变化时,其相位角变化为()答案:-90°~-270°16.下图给出了某最小相位系统串联校正前后的对数幅频特性渐近曲线L0、L1。
校正后与校正前相比,时域性能()答案:%,17.下图所示的有源电网络,当C1=C2,R1>R2时,以ui为输入、uo为输出的作用是:()答案:相位超前18.反馈控制系统如图所示,求闭环传递函数()答案:19.闭环传递函数为的单位脉冲响应曲线在处的值为( )答案:20.某控制系统的单位阶跃响应为。
西安交通大学硕士研究生招生考试参考书目

255 英语(二外) 256 日语(二外)
257 俄语(二外) 258 德语(二外)
《现代大学英语》(1-4 册)
杨立民等
全新版大学英语第二版《综合教程》 李荫华 等 (1-3) 《标准日本语》初级(上、下)中级 (上册)
《东方俄语》(1-2 册) 《大学德语》(修订版)1--3 册
丁树杞 张书良
外语教学与研究 出版社 上海外语教育出 版社 人民教育出版社 与(日本)光村 图书出版株式会 社合作编写 外语教学与研究 出版社 高等教育出版社
440 新闻与传播专业基础 819 新闻传播学基础
《传播学引论》 《传播学引论》
张迈曾主编 李彬主编
西安交通大学出 版社 新华出版社
《新闻学概论》
李良荣主编
复旦大学出版社
《传播学原理》
张国良主编
复旦大学出版社
448 汉语写作与百科知识 《自然科学史十二讲》
《中国文化读本》
701 工业设计思想基础
《工业设计思想基础》
戴树桂
高等教育出版社 2006 年第二版
808 核工程技术基础(反应堆《核反应堆物理分析》 物理分析或反应
《原子核物理》
谢仲生 杨福家等
西安交通大学出 2004 年版 版社
复旦大学出版社 1993 年版
备注
西安交通大学 硕士研究生入学考试科目主要参考书
邮政编码:710049
地址:西安市咸宁西路 28 号
河北美术出版社 1993 年版
《古代汉语》
王力
中华书局出版社 1997 年版修订本
备注
西安交通大学 硕士研究生入学考试科目主要参考书
邮政编码:710049
地址:西安市咸宁西路 28 号
西安交通大学硕士研究生入学考试科目主要参考书
《工业设计思想基础》
702 数学分析
《数学分析》
陈高翔
贺忠厚 邓晓兰 铁卫 冯宗宪 (美)萨尔瓦多 樊秀峰 张迈曾主编
李彬主编
中国经济出版社 西安交通出版社 西安交大出版社 西安交大出版社
高等教育出版社 清华大学出版社 西安交大出版社 西安交通大学出版 社 新华出版社
2004 年
2007 年 2007 年 2007 年 2011 年 2010 年 2003 年
《东方俄语》(1-2 册) 《大学德语》(修订版)1--3 册
丁树杞 张书良
外语教学与研究出 版社 高等教育出版社
高等教育出版社
上海外语教育出版 社 人民教育出版社与 (日本)光村图书 出版株式会社合作 编写 外语教学与研究出 版社 高等教育出版社
2002 版 2011 版 2011 版 2010 版 2005 版
《固体物理学》 《传热学》
陆栋 陶文铨
上海科学技术出版 2003 年 社
高等教育出版社 1998 年版
814 计算机基础综合
参考范围见我校研究生招生主页
2013 年西安交通大学研究生入学考试
计算机基础综合科目大纲
815 信号与系统(含数字信号《信号与线性系统 》
阎鸿森等
西安交大出版社 1999 年版
434 国际商务专业基础 440 新闻与传播专业基础 819 新闻传播学基础
448 汉语写作与百科知识
《公共财政学》 《财政学》 《税收学》 《国际商务》 《国际经济学》 《国际投资与跨国公司》 《传播学引论》
《传播学引论》
《新闻学概论》
《传播学原理》
《自然科学史十二讲》
《中国文化读本》
701 工业设计思想基础
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.1.3 瞬态过程的性能指标
描述稳定的系统在单位阶跃信号作用下,瞬态过程随时 间t的变化状况的性能指标,称为瞬态性能指标,或称为动 态性能指标。
为了便于分析和比较,假定系统在单位阶跃输入信号作 用前处于静止状态,而且输出量及其各阶导数均等于零。
稳定控制系统的单位阶跃响应曲线有衰减振荡和单调上升
两种类型。
A阶跃幅度,A=1
x(t)
称为单位阶跃函数,A
记为1(t)。
t
其拉氏变换后的像函数为: L[x(t)] A
s
斜坡函数(速度阶跃函数):
x(t)
0, t Bt,
0 t0
B=1时称为单位斜 坡函数。
其拉氏变换后的像函数为:
L[x(t)]
B s2
x(t) x(t) Bt
t
3.1.1 典型输入作用及其拉氏变换
yt
y(t)
y() %
ymax
y()
( 2或5)
y %
y()
2或5
y() 2
0
td tr tp
t
t
ts
讨论系统的时域性能指标时,通常选择单位阶跃信号作为 典型输入信号。
3.1.1 典型输入作用及其拉氏变换
典型响应:
⒈ 单位脉冲函数响应:
Y (s) G(s)1
⒉ 单位阶跃函数响应: ⒊ 单位斜坡函数响应:
Y (s) G(s) 1 s
Y
(s)
G(s)
1 s2
⒋ 单位抛物线函数响应:
1 Y (s) G(s) s3
At 2 ]
正弦函数:x(t) ASint ,式中,A为振幅, 为频率。
其拉氏变换后的像函数为:
L[ Asin t]
n
s2
2 n
3.1.1 典型输入作用及其拉氏变换
分析系统特性究竟采用何种典型输入信号,取决于实际系 统在正常工作情况下最常见的输入信号形式。
当系统的输入具有突变性质时,可选择阶跃函数为典型输 入信号;当系统的输入是随时间增长变化时,可选择斜坡函 数为典型输入信号。
抛物线函数(加速度阶跃函数):
0,t 0
x(t)
1 2
Ct
2
,
t
0
C=1时称为单位抛 物线函数。
其拉氏变换后的像函数为:
L[x(t)]
C s3
x(t) x(t)
1
Ct 2
2t
[提示]:上述几种典型输入信号的关系如下:
A
(t)
d dt
[ A1(t)]
d2 dt 2
[ At]
d3 dt3
[1 2
实际情况。 • 选取外加输入信号的形式应尽可能简单,易于在实验室
获得,以便于数学分析和实验研究。 • 应选取那些能使系统工作在最不利情况下的输入信号作
为典型的测试信号。
在控制工程中采用下列五种信号作为典型输入信号
3.1.1 典型输入作用及其拉氏变换
脉冲函数:
阶跃函数:
x(t
)
0,t 0
A,
t
0
控制系统的性能指标,可以通过在输入信号作用下系统的 瞬态和稳态过程来评价。系统的瞬态和稳态过程不仅取决于 系统本身的特性,还与外加输入信号的形式有关。
3.1.0 时域分析
典型初始状态:
规定控制系统的初始状态均为零状态,即在 t 0 时
.
..
y(0 ) y(0 ) y(0 ) 0
这表明,在外作用加入系统之前系统是相对静止的,被控 制量及其各阶导数相对于平衡工作点的增量为零。
第3章 自动控制系统的时域分析
3.1 典型输入作用和时域性能指标 3.2 一阶系统的瞬态响应 3.3 二阶系统的瞬态响应 3.4 高阶系统分析 3.5 稳定性和代数稳定判据 3.6 稳态误差分析
3.1 典型输入作用和时域性能指标
3.1.0 时域分析 3.1.1 典型输入作用及其拉氏变换 3.1.2 瞬态过程和稳态过程 3.1.3 瞬态过程的性能指标 3.1.4 稳态过程的性能指标 3.1.5 对一个控制系统的要求
3.1.1 典型输入作用及其拉氏变换
在分析和设计控制系统时,需要确定一个对各种控制系 统的性能进行比较的基础,这个基础就是预先规定一些具有 特殊形式的测试信号作为系统的输入信号,然后比较各种系 统对这些输入信号的响应。
选取测试信号时必须考虑的原则: • 选取的输入信号的典型形式应反映系统工作时的大部分
3.1.2 瞬态响应和稳态响应
2.稳态响应:又称为稳态过程。是指系统在典型输入信号 的作用下,当时间趋近于无穷大时,系统的输出响应状态。 稳态过程反映了系统输出量最终复现输入量的程度,包 含了输出响应的稳态性能。 从理论上说,只有当时间趋于无穷大时,才进入稳态过 程,但这在工程应用中是无法实现的。因此在工程上只讨论 典型输入信号加入后一段时间里的瞬态过程,在这段时间里, 反映了系统主要的瞬态性能指标。而在这段时间之后,认为 进入了稳态过程。
[提示]:上述几种典型响应有如下关系:
积分
积分
单位脉冲
单位阶跃
函数响应
函数响应
微分
微分
单位斜坡 函数响应
积分
单位抛物线 函数响应
微分
3.1.2 瞬态响应和稳态响应
在典型输入信号的作用下,任何一个控制系统的时间响 应都由瞬态响应和稳态响应两部分组成 。
1.瞬态响应:又称为瞬态过程或过渡过程。是指系统在典 型输入信号的作用下,系统的输出量从初始状态到最终状态 的响应过程。 由于实际的控制系统存在惯性、阻尼及其它一些因素, 系统的输出量不可能完全复现输入量的变化,瞬态过程曲线 形态可表现为衰减振荡、等幅振荡和发散等形式。 瞬态过程包含了输出响应的各种运动特性,这些特性称 为系统的瞬态性能。 一个可以实际运行的控制系统,瞬态过程必须是衰减的。 即系统必须是稳定的。
3.1.3 瞬态过程的性能指标
控制系统在典型输入信号的作用下的性能指标,由瞬态 性能指标和稳态性能指标两部分组成。 由于稳定是控制系统能够正常运行的首要条件,因此只 有当瞬态过程收敛(衰减)时,研究系统的瞬态和稳态性信号, 来计算系统时间域的瞬态和稳态性能。
3.1.0 时域分析
指控制系统在一定的输入信号作用下,根据输出量的时域表 达式,分析系统的稳定性、瞬态性能和稳态性能。
时域分析是一种在时间域中对系统进行分析的方法,具有 直观和准确的优点。由于系统的输出量的时域表达式是时间 的函数,所以系统的输出量的时域表达式又称为系统的时间 响应。
系统输出量的时域表示可由微分方程得到,也可由传递函 数得到。在初值为零时,可利用传递函数进行研究,用传递 函数间接的评价系统的性能指标。