遥控车IC原理图
遥控汽车控制原理

3. 第3次按动遥控器按键时,IC2的Y3端输出高电平,Y2端变为低电平, VD2和V2、V3、V6-V8、1C3停止工作,M停转;同时VD3导通,使V5 导通,IC4通电工作,其O/P端输出的语音电信号经V4放大后,驱动 BL发出“倒车,请注意!”的语音声。
结束
再见
•
1、有时候读书是一种巧妙地避开思考 的方法 。20.1 2.1220. 12.12Sa turday, December 12, 2020
•
2、阅读一切好书如同和过去最杰出的 人谈话 。02:0 2:0802: 02:0802 :0212/ 12/2020 2:02:08 AM
•
3、越是没有本领的就越加自命不凡。 20.12.1 202:02: 0802:0 2Dec-20 12-Dec-20
3.驱动电路由晶体管V6-Vll、电阻器R6-R9和电动机 M组成。
4.电源电路由电池GB、电源开关S、滤波电容器C2、 C4、C5和电阻器R2组成。
本电路图用途:
本例介绍的遥控玩具汽车,采用彩色电视 机、影碟机等家用电器遥控器来控制其前 进与后退,前进时汽车发出警笛声,后退 时汽车发出"倒车,请注意!"的语音声,趣 味性较强,可用于改制各种电动玩具汽车。
•
9、一个人即使已登上顶峰,也仍要自 强不息 。上午 2时2分 8秒上 午2时2 分02:02: 0820.1 2.12
• 10、你要做多大的事情,就该承受多大的压力。12/12/
遥控汽车控制原理课件
学习交流PPT
6
结束
谢谢 大家
学习交流PPT
再见
7
遥控汽车控制原理图
组员:
,高云飞,陈 博
学习交流PPT
1
原理图:
学习交流PPT
2
本电路有以下部分电路组成:
1.红外接收控制电路由红外接收头ICl、晶体管Vl、 电阻器Rl-R3、RlO、电容器Cl-C3和脉冲分配器集 成电路IC2组成。
2.音效/语音电路由音效集成电路IC3、语音集成电路 IC4、晶体管V2-V5、电阻器R4、R5和二极管VDlVD4组成。
3.驱动电路由晶体管V6-Vll、阻器R6-R9和电动机 M组成。
4.电源电路由电池GB、电源开关S、滤波电容器C2、 C4、C5和电阻器R2组成。
学习交流PPT
3
本电路图用途:
本例介绍的遥控玩具汽车,采用彩色电视机、影碟机等家用电器 遥控器来控制其前进与后退,前进时汽车发出警笛声,后退时汽 车发出"倒车,请注意!"的语音声,趣味性较强,可用于改制各种 电动玩具汽车。
4. 第4次按遥控器按键时,IC2的Y4端输出高电平,使V9-Vll导通,M反转, 汽车后退;同时VD4导通,使V4、V5和1C4维持工作。
5. 第5次按遥控器按键时,IC2的Y5端输出高电平,IC2强制复位,YO端
输出高电平,M停转,BL停止发声,汽车停止不动。
学习交流PPT
5
元器件选择:
1.Rl-R9选用1/4W金属膜电阻器或碳膜电阻器。 2.Cl、C2和C5均选用耐压值为lOV的铝电解电容器;C3 和C4均选用独石电容器。 3.VDl-VD4均选用 1N4148 型硅开关二极管。 4.Vl选用2SCl815型NPN晶体管;V2-V5、V7和VlO均选 用 S9013 型硅NPN晶体管;V6和V9选用 C8550 或58550、 3CG8550 型硅pNp晶体管;V8和Vll选用 C8050 或 S8050 、 3DG8050 型硅NPN晶体管。 5.ICl选用HSO038型一体化红外接收头;IC2选用 CD4017 型十进制计数/脉冲分配器;IC3选用内储警笛声的 音效集成电路;IC4选用内储 "倒车,请注意!"语音信息的语 音集成电路。 6.BL选用0.5W、8Ω的电动式扬声器。 7. M使用玩具汽车电动机。 8.S选用单极拨动开关。 9.GB使用4节5号镍镉充电电池或镍氢充电电池。
遥控汽车控制原理ppt
工作原理:
1. 接通电源开关S时,IC1的3脚输出高电平,使Vl饱和导通,IC2的YO 端输出高电平,此时电动机M不工作,汽车停止不动。按一下遥控器 上任意键时,ICl接收到红外遥控信号并将其转换为电信号,该信号经 ICl内电路处理后从其3脚输出一个高电平脉冲,使Vl由导通变为截止, 从IC2的CP端输入一个计数脉冲,使C2的Yl端输出高电平,VDl和V2 导通,IC3通电工作,其O/P端输出的音效电信号经V3放大后,驱动 BL发出警笛声。
4. 第4次按遥控器按键时,IC2的Y4端输出高电平,使V9-Vll导通,M反 转,汽车后退;同时VD4导通,使V4、V5和1C4维持工作。
5. 第5次按遥控器按键时,IC2的Y5端输出高电平,IC2强制复位,YO端 输出高电平,M停转,BL停止发声,汽车停止不动。
-
元器件选择:
1.Rl-R9选用1/4W金属膜电阻器或碳膜电阻器。 2.Cl、C2和C5均选用耐压值为lOV的铝电解电容 器;C3和C4均选用独石电容器。 3.VDl-VD4均选用 1N4148 型硅开关二极管。 4.Vl选用2SCl815型NPN晶体管;V2-V5、V7和VlO均 选用 S9013 型硅NPN晶体管;V6和V9选用 C8550 或 58550、 3CG8550 型硅pNp晶体管;V8和Vll选用 C8050 或 S8050 、 3DG8050 型硅NPN晶体管。 5.ICl选用HSO038型一体化红外接收头;IC2选用 CD4017 型十进制计数/脉冲分配器;IC3选用内储警笛声的 音效集成电路;IC4选用内储 "倒车,请注意!"语音信息的语 音集成电路。 6.BL选用0.5W、8Ω的电动式扬声器。 7. M使用玩具汽车电动机。 8.S选用单极拨动开关。 9.GB使用4节5号镍镉充电电池或镍氢充电电池。
遥控小汽车电路图

自制无线遥控小汽车电路图PT2262 无线发射PT2272 无线接收T10A发射模块XY-R04A接收模块无线遥控发射和接受原理图编码芯片PT2262 发出的编码信号由:地址码、数据码、同步码组成一个完整的码字,解码芯片PT2272 接收到信号后,其地址码经过两次比较核对后,VT 脚才输出高电平,与此同时相应的数据脚也输出高电平,如果发送端一直按住按键,编码芯片也会连续发射。
当发射机没有按键按下时,PT2262 不接通电源,其17 脚为低电平,所以315MHz 的高频发射电路不工作,当有按键按下时,PT2262 得电工作,其第17 脚输出经调制的串行数据信号,当17 脚为高电平期间315MHz 的高频发射电路起振并发射等幅高频信号,当17 脚为低平期间315MHz 的高频发射电路停止振荡,所以高频发射电路完全收控于PT2262 的17 脚输出的数字信号,从而对高频电路完成幅度键控(ASK 调制)相当于调制度为100%的调幅。
PT2262和PT2272除地址编码必须完全一致外,振荡电阻还必须匹配,一般要求译码器振荡频率要高于编码器振荡频率的2.5~8倍,否则接收距离会变近甚至无法接收,随着技术的发展市场上出现一批兼容芯片,在实际使用中只要对振荡电阻稍做改动就能配套使用。
在具体的应用中,外接振荡电阻可根据需要进行适当的调节,阻值越大振荡频率越慢,编码的宽度越大,发码一帧的时间越长。
市场上大部分产品都是用2262/1.2M=2272/200K 组合的,少量产品用2262/4.7M=2272/820K。
解码接收模块包括接收头和解码芯片PT2272两部分组成。
接收头将收到的信号输入PT2272的14脚(DIN),PT2272再将收到的信号解码。
接收板工作电压为DC 5V,接收灵敏度:-103dBm ,尺寸(mm):49*20*7 ,工作频率:315MHz,工作电流:5mA ,编码类型:固定码(板上焊盘跳接设置) 应用说明:与各类型遥控器配合使用,解码输出后进行相应控制,在通常使用中,我们一般采用8位地址码和4位数据码,这时编码芯片PT2262和解码芯片PT2272的第1~8脚为地址设定脚,有三种状态可供选择:悬空、接正电源、接地三种状态,地址编码不重复度为38=6561组,只有发射端PT2262和接收端PT2272的地址编码完全相同,才能配对使用,遥控模块的生产厂家为了便于生产管理,出厂时遥控模块的PT2262和PT2272的八位地址编码端全部悬空,这样用户可以很方便选择各种编码状态,用户如果想改变地址编码,只要将PT2262和PT2272的1~8脚设置相同即可,例如将发射机的PT2262的第2脚接地,第3脚接正电源,其它引脚悬空,那么接收机的PT2272只要也第2脚接地,第3脚接正电源,其它引脚悬空就能实现配对接收。
奥迪遥控赛车电路工作原理

奥迪遥控赛车电路工作原理该电动玩具采用软包装IC,将编码器芯片和解码器芯片直接集成在电路板上。
与塑封直插式相比。
可使赛车抗碰撞性增强,又因采用3V低压电。
仅用两节5号电池,与9V供电相比可使电池总重量减轻,电池夹总容积减小。
因而有利于赛车小型化及灵活性提高,很受爱好玩赛车比赛车儿童青睐。
1.遥控发射电路工作原理遥控发射电路如上图所示,ICI型号W215T,⑽、⑼脚外接Rl的时钟振荡电阻。
⑷、⑸,⑺,⑼脚为四通道编码脉冲选通端,其中⑸脚前进进、⑷脚后退、⑼脚左转、⑺脚右转,当某一脚经发射按钮接地后,表示所对应的选通端被选通,由内部编码器进行编码,形成的编码由⑶脚输出⑻脚实际未用),经J2、R21到Ql基极。
同时,由Q2、X1振荡产生49.920M Hz的载波信号经C5也加到Q1基极,使编码脉冲对载波信号进行调制,并经Q1放大,同拉杆天线向空中发射出去。
该遥控发射电路有两个特点,第一个特点是Q2基极的偏置不是由电源直接提供,而是经IC内部稳压后由1脚输出稳定电压,为Q2基极提供偏置,这样即使电池电压在3.28-2.3V大范围变化的条件下,而由1脚输出电压只有1.87~1.73v小范围的变化,确保发射电路在一定范围内不会受到电池电压下降的影响而能保持工常工作。
第二个是不需要电源开关。
因为不发射时⑴脚及⑼、⑽、⑾、⑿脚均为0V.所以Ql、Q2不工作。
LED l不亮,只有发射时Ql、Q2工作。
LED1才亮。
在待机状态下该遥控发射电路不耗电。
即待机电流为0.因此可将电源开关省去。
2.接收与驱动电路工作原理下图为接收与驱动电路,由Ql、C2、C3.I2、L3等组成典型的“自熄式”超再生接。
收电路。
天线收到载波信号经Cl加到Ql集电极。
C2、I2并联回路发生谐振。
经C3构成超再生正反馈。
使电路产生强烈振荡。
淬熄电压和周围L3、Rl、C4、R2决定(电压峰值应达500mV以上最佳周期为5μs),又迫使强烈的振荡处于间歇工作状态。
五功能遥控车升压芯片 SM61

五功能遥控车升压芯片SM6135S特点・宽电压范围:2.4V~5.0V(不使用升压模块)1.0V~3.0V(使用升压模块)・超强的驱动能力・所需外部元件极少概述SM6135S是专为遥控车设计的大规模集成电路。
有5个控制键控制遥控车的运动,它们分别是:前进、后退、向右、向左和加速这5个功能。
芯片自带3.8V 升压模块供用户选用。
芯片管脚及内部框图如下管脚说明管脚名称功能解释1 VO2 非门2输出脚。
2 GND 电源地。
3 SI 编码信号输入脚。
4 OSCI 振荡输入脚。
5 OSCO 振荡输出脚。
6 RIGHT 右转向输出脚。
7 LEFT 左转向输出脚。
8 LX 升压模块脉冲电流输出引脚9 MOD 两级变速功能选择脚;悬空为“1”,表示关闭两级变速功能10 BACKWARD 后退输出脚。
11 FORWARD 前进输出脚。
12 TURBO 加速输出脚。
13 VDD 电源。
14 VI1 非门1输入脚。
15 VO1 非门1输出脚。
16 VI2 非门2输入脚。
电性能指标SM6135S(不使用升压模块,VDD=4.0V,FOSC=128KHZ,T=25°C)项目符号最小值典型值最大值4.0V5.0V2.4V工作电压 VDD工作电流 IDD 1mA输出驱动电流 IDR 10mA频率允许偏差范围Ftolerance -20%+20%SM6135S(使用升压模块,VIN=1.5V,FOSC=128KHZ,T=25°)项目符号最小值典型值最大值3.0V1.5V1.0V工作电压 VIN4.1V3.8V升压值 VDD3.5V0.8V维持电压 VH工作电流 IDD 1.5mA驱动电流 IDR 10mA频率允许偏差范围FT -20%+20%PAD图和座标管脚X YVDD 403.15 906.05VI1 292.95 905.70VO1 182.80 906.05VI2 72.85 860.60VO2 73.00 107.90GND 183.35 72.80SI 293.50 72.50OSCI 421.30 74.80OSCO 567.40 72.95RIGHT 677.55 73.35LEFT 787.35 73.00LX 868.90 213.60MOD 868.20 870.65BACKWARD 732.80 905.95FORWARD 623.00 906.05TURBO 513.05 906.05应用图:。
一款遥控玩具汽车电路剖析

电子技校电子报/2004年/12月/12日/第013版/一款遥控玩具汽车电路剖析北京闫飞该遥控汽车由遥控手柄和接收控制两部分组成,手柄采用一节(6F22)9V叠层电池供电,有前进、后退,左转、右转两个操作滑杆开关。
遥控距离30~50米。
遥控器电路原理如图1所示,是笔者根据实物绘制,元件编号为实物丝网印标字符。
图1电路中IC1(TA7333P)为遥控控制芯片,内含稳压、编码、调制、本振、高频放大等全部调幅功能, 脚外接晶体X1(27.125M Hz)决定了遥控器的发射频率。
L2为天线匹配线圈,L1为发射频率微调电感。
SW2-1、SW2-2、SW1连动,为前进、倒行控制操作杆(开关);SW3、SW4连动,为左、右转向控制操作杆(开关)。
接收控制部分电路原理图见图2。
接收控制部分由超再生接收、解码控制IC、动力电机三部分组成。
该机驱动部分采用两个电机分别作为前进或后退、向左或向右转向的动力,依靠电机的正、反转实现双重控制。
电动机M2是前进(或后退)动力驱动,三极管Q6、Q7、Q11~Q16等组成M2的正、反转控制电路,受IC1(TA7657P)的、!、∀、#、(11)脚控制。
电机M1是向左(或向右)转向的驱动动力,三极管Q8~Q10等组成M1的正、反转控制电路,受IC1的∀、#脚控制。
遥控汽车采用8节5号电池(12V)供电,由于留有充电接口,可以采用8节5号充电电池(9.6V)供电。
CK0、D0、R0为充电接口,K0为电源开关,从电路中可以看出, M2为12V直流电机,M1为6V直流电机,IC1的供电为12V,超再生接收电路的供电由IC1内部稳压电路提供。
超再生接收电路由接收天线ANT、C1~C7、R1~R5、R7、L1、Q1等组成,L1为接收频率微调电感。
接收到的指令信号经过R5、C9传送到解码电路IC1的∃脚内电路,经IC1内部放大、整形、解码后,由IC1的、!、∀、#、(11)脚输出控制电平。
IC1在各种状态时,对应输出控制脚电压见附表。
FMRX2AM(五功能遥控接收IC)

二、 特点
2 2 工作电压范围:1.5V~7.6V; 内置升压值 3.6V; 直接驱动车仔马达; 具有过热保护功能; 只需极少量的外围元件; 五个功能控制(左右输出电流加大); 较宽的信号频率容忍度; 封装形式:SOP-16、DIP-16。
3 3 4 4
三、 产品应用
深圳市富满电子有限公司
SHENZHEN FUMAN ELECTRONICS CO., LTD.
FMRX2AM(文件编号:S&CIC1110)
一、 概述
五功能遥控接收 IC
FMRX2AM 是用于遥控玩具车设计的无线接收集成电路,采用了功率 MOS 工艺制造。可直接驱动马达, FMRX2AM 有五个功能来控制遥控车的运动状态:前进、后退、左转、右转、加速。
五功能遥控接收 IC
— — 5 0 1.5 — 0.8 20 — —
5
V V uA uA MΩ
1
1.6
Ω
八、 典型应用电路图
C8 102P R6 2.2K R8 4.7M C3 104P
1 2 3 VO2 GND SI OSCI VI2 VO1 VI1 VDD 16 15 14 13 12 11 10 9
注:最大连续输出电流视散热条件而定。
五功能遥控接收 IC
符号 VCC DIP-16 额定值 7.6 1 0.96 125 130 -20~85 150 -55~150 350~370 2.8 A 2.5 2.0 A SOP-16 1.5 DIP-16 单位 V W W ℃/W ℃/W ℃ ℃ ℃ ℃
3 4 5 6 7 8 9 10 11 12 13 14 15 16
DIP-16(FMRX2AMD)
VO2 VO2 GND GND SI SI OSCI OSCI OSCO OSCO LX LX 1 1 2 2 3 3 4 4 5 5 6 6 16 16 15 15 VI2 VI2 VO1 VO1
遥控玩具车电路图

遥控玩具车电路图今天介绍这款遥控车采用台湾瑞昱公司生产的专用于遥控车模的CMOS大规模集成电路TX-2/RX-2。
该集成电路具有5种控制功能,即前进、后退加速、左转和右转等。
由于采用了编码发射及解码接收电路,所以具有较高的抗干扰性能。
图2为接收机电路,在发射端发出的高频信号经接收天线接收,Q1、L2、C2、C3等构成的超再生接收电路,L2、C2为并联谐振回路,其作用是选频,C3为超再生正反馈电容,调整L2可改变接收频率。
R1、R2、C5决定超再生的熄灭电压。
接收信号经R4、C7送入译码电路RX-2的{14}脚进行放大,放大后的信号由{1}脚输出经R8送入译码信号输出端{3}脚进行译码。
当译码电路将收到的信号译码后,若是前进信号,则{11}脚输出高电平,Q11导通→Q12、Q13分别导通,+4。
5V等经Q12→MA→MB→Q13→地,电机正转,车子前进,其他功能依此类推,不再赘述。
R9为振荡电阻。
RX-2中的{6}、{7}、{10}、{11}、{12}脚分别为右转、左转、后退、前进、加速等功能的输出端。
R20、D1、C1、C14组成简单的稳压电路,为RX-2提供稳定的工作电压,D2为隔离二极管。
为使该车更加美观逼真,如图2中所示。
用两只小灯泡,两只LED按图安装,小灯泡作遥控车的前大灯使用,LED为倒车灯。
当车子前进时,大灯亮,LED反偏不亮;倒车时在前大灯亮着的同时,LED为正偏也亮起来作倒车灯使用。
夜晚玩车时,更为有趣。
玩具汽车遥控接收电路:(a)图所示为接收电路,它有ABCDEFG七路输出,分别控制转向(图b);左右转向灯(图c);驱动电机(图d);音乐片发出声音(图e);刹车制动电磁铁和驱动尾部刹车灯LED5LED6发光;前后大灯开关(图g);电源(图h).遥控玩具汽车电路本例介绍的遥控玩具汽车,采用彩色电视机、影碟机等家用电器遥控器来控制其前进与后退,前进时汽车发出警笛声,后退时汽车发出“倒车,请注意!”的语音声,趣味性较强,可用于改制各种电动玩具汽车。
遥控玩具车原理图

遥控玩具车原理图
今天介绍这款遥控车采用台湾瑞昱公司生产的专用于遥控车模的CMOS大规模集成电路TX-2/RX-2。
该集成电路具有5种控制功能,即前进、后退加速、左转和右转等。
由于采用了编码发射及解码接收电路,所以具有较高的抗干扰性能。
图2为接收机电路,在发射端发出的高频信号经接收天线接收,Q1、L2、C2、C3等构成的超再生接收电路,L2、C2为并联谐振回路,其作用是选频,C3为超再生正反馈电容,调整L2可改变接收频率。
R1、R2、C5决定超再生的熄灭电压。
接收信号经R4、C7送入译码电路RX-2的{14}脚进行放大,放大后的信号由{1}脚输出经R8送入译码信号输出端{3}脚进行译码。
当译码电路将收到的信号译码后,若是前进信号,则{11}脚输出高电平,Q11导通→Q12、Q13分别导通,+4。
5V等经Q12→MA→MB→Q13→地,电机正转,车子前进,其他功能依此类推,不再赘述。
R9为振荡电阻。
RX-2中的{6}、{7}、{10}、{11}、{12}脚分别为右转、左转、后退、前进、加速等功能的输出端。
R20、D1、C1、C14组成简单的稳压电路,为RX-2提供稳定的工作电压,D2为隔离二极管。
为使该车更加美观逼真,如图2中所示。
用两只小灯泡,两只LED按图安装,小灯泡作遥控车的前大灯使用,LED为倒车灯。
当车子前进时,大灯亮,LED反偏不亮;倒车时在前大灯亮着的同时,LED为正偏也亮起来作倒车灯使用。
夜晚玩车时,更为有趣。
遥控小车

基于单片机的红外遥控小车系统设计默认分类2010-06-23 09:31:05 阅读122 评论0 字号:大中小订阅红外接收与控件电路原理图:红外遥控器原理图:红外遥控器实物图:红外接收与控制实物图:程序:接收控制主程序:#include<reg52.h>#include "hongwai.c"#include "5110.c"sbithy=P0^0;//LED指示灯sbithz=P2^0;sbitqy=P1^4;sbitqz=P3^7;sbit djf1=P1^0;//电机1的方向控制sbit djd1=P1^1;//电机1的动力控制sbit djf2=P1^2;//电机2的方向控制sbit djd2=P1^3;//电机2的动力控制unsigned char flag,flag1,PW;bit fan,fan1,tf=0;unsigned char fafg=0;unsigned char time_flag;unsigned char data time[2];//===================================== //ms延时//===================================== voiddelayms(unsigned intms){unsigned char i;while(ms--)for(i=0;i<120;i++);}//===================================== //LED灯闪烁//===================================== void LED(unsigned char ms){unsigned char i;for(i=0;i<ms;i++){delayms(200);qz=~qz;qy=~qy;hz=~hz;hy=~hy;}}//====================================== //控制//===================================== voidkongzi(void){switch(shu[2]){case 0x20: {//前进fafg=1;qz=qy=0;hz=hy=1;TR1=ET1=1;djd1=djd2=1;djf1=djf2=0;fan=0;break;}case 0x30: {//后退fafg=2;qz=qy=1;hz=hy=0;TR1=ET1=1;djd1=djd2=1;djf1=djf2=1;fan=1;break;}case 0x40: {//前左转弯fafg=3;djf1=djf2=0;qz=0;qy=hz=hy=1;djd1=1;djd2=0;fan1=0;TR1=ET1=1;break;}case 0x60: { //后左转弯fafg=4;djf1=djf2=1;hz=0;hy=qz=qy=1;djd1=1;djd2=0;fan1=0;TR1=ET1=1;break;}case 0x50: {//前右转弯fafg=5;djf1=djf2=0;qy=0;qz=hy=hz=1;djd1=0;djd2=1;fan1=1;TR1=ET1=1;break;}case 0x70: { //后退fafg=6;djf1=djf2=1;hy=0;hz=qz=qy=1;djd1=0;djd2=1;fan1=1;TR1=ET1=1;break;}case 0x80: {if(tf==1){qy=qz=hy=hz=1;TR1=ET1=0;djd1=djd2=0;NOKIA5110_clear(); // 清屏W_LCD_chinese(20,0,21);//停W_LCD_chinese(40,0,22);//止W_LCD_zifu(15,3,time[1]/10);//W_LCD_zifu(23,3,time[1]%10);//W_LCD_zifu(33,3,11);//:W_LCD_zifu(42,3,time[0]/10);//W_LCD_zifu(50,3,time[0]%10);//time[0]=time[1]=0;tf=0;}break;}}}//*********************************************** //显示//************************************************ voidLCD_display(void){NOKIA5110_clear(); // 清屏W_LCD_zifu(15,3,time[1]/10);//W_LCD_zifu(23,3,time[1]%10);//W_LCD_zifu(33,3,11);//:W_LCD_zifu(42,3,time[0]/10);//W_LCD_zifu(50,3,time[0]%10);//if(fafg==1){W_LCD_chinese(20,0,0);//前W_LCD_chinese(40,0,1);//进}if(fafg==2){W_LCD_chinese(20,0,2);//后W_LCD_chinese(40,0,3);//退}if(fafg==3){W_LCD_chinese(5,0,0);//前W_LCD_chinese(25,0,4);//左W_LCD_chinese(45,0,5);//转W_LCD_chinese(65,0,6);//弯}if(fafg==4){W_LCD_chinese(5,0,2);//后W_LCD_chinese(25,0,4);//左W_LCD_chinese(45,0,5);//转W_LCD_chinese(65,0,6);//弯}if(fafg==5){W_LCD_chinese(5,0,0);//前W_LCD_chinese(25,0,7);//右W_LCD_chinese(45,0,5);//转W_LCD_chinese(65,0,6);//弯}if(fafg==6){W_LCD_chinese(5,0,2);//后W_LCD_chinese(25,0,7);//右W_LCD_chinese(45,0,5);//转W_LCD_chinese(65,0,6);//弯}}//===================================== //定时器T1//===================================== void wan_T1(void) interrupt 3{time_flag++;tf=1;TH1=(65536-50000)/256;TL1=(65536-50000)%256;if(time_flag>15){time[0]++;time_flag=0;if(time[0]>59){time[0]=0;time[1]++;if(time[1]>59) time[1]=0;}}}//===================================== //主函数//===================================== void main(void){djd1=djd2=0;NOKIA5110_init();NOKIA5110_clear(); // 清屏W_LCD_chinese(0,0,8);//正delayms(100);W_LCD_chinese(15,0,9);//在delayms(100);W_LCD_chinese(30,0,10);//初delayms(100);W_LCD_chinese(45,0,11);//始delayms(100);W_LCD_chinese(60,0,12);//化delayms(100);W_LCD_chinese(10,3,13);//请delayms(100);W_LCD_chinese(25,3,14);//稍delayms(100);W_LCD_chinese(40,3,2);//后delayms(100);W_LCD_zifu(60,3,10);//...PW=20;TH1=(65536-50000)/256;TL1=(65536-50000)%256;IP=0x09;//设置中断优先级IPH=0x08;open_interrupt();TR1=ET1=0;LED(10);qy=qz=hy=hz=1;NOKIA5110_clear(); // 清屏 W_LCD_chinese(1,0,10);//初delayms(100);W_LCD_chinese(16,0,11);//始delayms(100);W_LCD_chinese(31,0,12);//化delayms(100);W_LCD_chinese(46,0,15);//完delayms(100);W_LCD_chinese(61,0,16);//成delayms(100);W_LCD_chinese(0,3,17);//等delayms(100);W_LCD_chinese(15,3,18);//待delayms(100);W_LCD_chinese(30,3,19);//信delayms(100);W_LCD_chinese(45,3,20);//号delayms(100);W_LCD_zifu(65,3,10);//...while(1){kongzi();if(tf==1&&time_flag==7) LCD_display();}}红外解码:/*************************************************************************/ /**** 红外解码/*** 晶振:11.0592MHZ/*** 数据口:外中断0/*** 计数器:定时器T0/************************************************************************/#include<reg52.h>sbitDat=P3^2; //数据口bittru;unsigned char shu[4];/****************开中断************************/voidopen_interrupt(void){TMOD=0x11; //定时器T0工作在方式1IT0=1; //中断0在下降沿触发TR0=1;EX0=1; //开外部中断0EA=1; //开中断}/**************接收数据**********************/voidR_Dat(void) interrupt 0{unsigned char i,j;unsignedintdtime=0;unsigned char temp;// P1=0xff;TH0=TL0=0;while(!Dat){if(TH0*256+TL0>20000) return;}while(Dat)if(TH0*256+TL0>20000) return;dtime=TH0*256+TL0;TH0=TL0=0;if(8000<dtime&&dtime<14000) //9MS的引导码+4.5MS的结束码{for(i=0;i<4;i++){temp=0;for(j=0;j<8;j++){while(!Dat){if(TH0*256+TL0>20000) return;}while(Dat){if(TH0*256+TL0>20000) return;}dtime=TH0*256+TL0;TH0=TL0=0;if(1450<dtime&&dtime<3000) {temp=(temp>>1)|0x80;}//是否为1 else if(700<dtime&&dtime<1450) {temp=(temp>>1)|0x00;}//是否为0 }shu[i]=temp;}if(shu[0]==~shu[1]&&shu[2]==~shu[3]) tru=1;//查错}}LCD5110驱动程序:#include<reg52.h>#include "ziku.C"//-----------------管脚定义-------------------------sbit LCD_sce = P2^7; //片选,低最平有效sbit LCD_rst = P2^6; //复位,0复位sbit LCD_dc = P2^5; //1写数据,0写指令sbit LCD_sdin = P2^4; //数据sbit LCD_sclk = P2^3; //时钟//**********************************************************************// NOKIA5110_w_byte : 使用SPI接口写数据到LCD// 输入参数:data :写入的数据;// command :写数据/命令选择;//**********************************************************************void NOKIA5110_w_byte(unsigned char dat,unsigned char command) {unsigned char i;LCD_sce=0; //LCD使能LCD_dc=command;//for(i=0;i<8;i++) //传输8位数据(1个字节){if(dat&0x80) LCD_sdin=1;else LCD_sdin=0;dat=dat<<1;LCD_sclk=0;LCD_sclk=1;}LCD_sce=1; //LCD不使能}//**********************************************************************//NOKIA5110_init : LCD初始化//**********************************************************************void NOKIA5110_init(void){unsigned char k;LCD_rst=0;for(k=0;k<250;k++);LCD_rst=1;//-------------------------------------------------------------NOKIA5110_w_byte(0x21, 0); // 使用扩展命令设置LCD模式NOKIA5110_w_byte(0xd0, 0); // 设置偏置电压NOKIA5110_w_byte(0x06, 0); // 温度校正NOKIA5110_w_byte(0x13, 0); // 1:48NOKIA5110_w_byte(0x20, 0); // 使用基本命令NOKIA5110_w_byte(0x0c, 0); // 设定显示模式,正常显示}//**********************************************************************// NOKIA5110_set_XY : 设置LCD坐标函数// 输入参数:X:0-83// Y:0-5//**********************************************************************void NOKIA5110_set_XY(unsigned char x, unsigned char y){NOKIA5110_w_byte(0x40 | y, 0); // 列(竖)NOKIA5110_w_byte(0x80 | x, 0); // 行(横)}//*********************************************************************//写汉字到LCD//*********************************************************************voidW_LCD_chinese(unsigned char X,unsigned char Y,unsigned char dat)unsigned char i;NOKIA5110_set_XY(X,Y);for(i=0;i<16;i++) NOKIA5110_w_byte(hanzi[dat][i],1);NOKIA5110_set_XY(X,Y+1);for(i=16;i<32;i++)NOKIA5110_w_byte(hanzi[dat][i],1);}//*********************************************************************//写字符到LCD5110//*********************************************************************voidW_LCD_zifu(unsigned char X,unsigned char Y,unsigned char dat) {unsigned char i;NOKIA5110_set_XY(X,Y);for(i=0;i<8;i++) NOKIA5110_w_byte(zifu[dat][i],1);NOKIA5110_set_XY(X,Y+1);for(i=16;i<24;i++)NOKIA5110_w_byte(zifu[dat][i],1);}//**********************************************************************//NOKIA5110_clear : LCD清屏//**********************************************************************void NOKIA5110_clear(void){unsigned char t;unsigned char k;NOKIA5110_set_XY(0,0);for(t=0;t<6;t++){for(k=0;k<84;k++)NOKIA5110_w_byte(0x00,1);}}字库:unsigned char code zifu[][32]={{0xF0,0xF8,0x0C,0x04,0x0C,0xF8,0xF0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x03,0 x07,0x0C,0x08,0x0C,0x07,0x03,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*以上为"0"的点阵*/{0x00,0x10,0x18,0xFC,0xFC,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x 08,0x08,0x0F,0x0F,0x08,0x08,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*以上为"1"的点阵*/{0x08,0x0C,0x84,0xC4,0x64,0x3C,0x18,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0E,0 x0F,0x09,0x08,0x08,0x0C,0x0C,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*以上为"2"的点阵*/{0x08,0x0C,0x44,0x44,0x44,0xFC,0xB8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x04,0x 0C,0x08,0x08,0x08,0x0F,0x07,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*以上为"3"的点阵*/{0xC0,0xE0,0xB0,0x98,0xFC,0xFC,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0 x00,0x00,0x08,0x0F,0x0F,0x08,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*以上为"4"的点阵*/{0x00,0xF8,0x98,0x48,0x48,0x88,0x88,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x 1C,0x10,0x20,0x20,0x18,0x0F,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*以上为"5"的点阵*/{0x00,0xE0,0x30,0x88,0xC8,0x98,0x10,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x 0F,0x19,0x20,0x20,0x30,0x1F,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*以上为"6"的点阵*/{0x00,0x08,0x08,0x08,0x08,0xE8,0x38,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x 00,0x00,0x38,0x1F,0x01,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*以上为"7"的点阵*/{0x00,0x70,0xD8,0x08,0x08,0xD8,0x70,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x 1E,0x31,0x21,0x21,0x31,0x1E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*以上为"8"的点阵*/{0x00,0xF0,0x18,0x08,0x08,0x18,0xF0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x 19,0x33,0x22,0x22,0x19,0x0F,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*以上为"9"的点阵*/{0x80,0x80,0x00,0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x 01,0x00,0x01,0x01,0x00,0x01,0x01,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*10以上为"..."的点阵*/{0x00,0x00,0x60,0x60,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x 00,0x06,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*11以上为":"的点阵*/};unsigned char code hanzi[][32]={{0x00,0x08,0x08,0xC8,0x48,0x4A,0x4C,0xC8,0x08,0x08,0xCE,0x0A,0x08,0xE8,0x08,0x00,0x00, 0x00,0x80,0xFF,0x09,0x09,0x49,0x7F,0x00,0x00,0x0F,0x40,0x40,0x7F,0x00,0x00},/*0以上为"前"的点阵*/{0x00,0x40,0x44,0xC8,0x00,0x10,0x10,0x10,0xFE,0x10,0x10,0xFE,0x10,0x10,0x10,0x00,0x00,0x 60,0x20,0x3F,0x20,0x21,0x51,0x4F,0x41,0x41,0x41,0x5F,0x41,0x41,0x41,0x00},/*1以上为"进"的点阵*/{0x00,0x00,0x00,0xFC,0x24,0x24,0x24,0x24,0x24,0x24,0x24,0x26,0x26,0x24,0x20,0x00,0x00,0x 20,0x3C,0x07,0x00,0x7E,0x22,0x22,0x22,0x22,0x22,0x22,0x7E,0x00,0x00,0x00},/*2以上为"后"的点阵*/{0x00,0x80,0x84,0x9C,0x00,0x00,0xFC,0x54,0x54,0x54,0x54,0x54,0x7C,0x7C,0x00,0x00,0x00,0 x40,0x60,0x3F,0x20,0x20,0x5F,0x50,0x48,0x4B,0x42,0x44,0x4E,0x59,0x40,0x00},/*3以上为"退"的点阵*/{0x00,0x00,0x10,0x10,0x10,0x90,0x7C,0x1E,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x00,0x00,0x 10,0x10,0x0C,0x46,0x41,0x41,0x41,0x41,0x7F,0x41,0x41,0x41,0x41,0x40,0x00},/*4以上为"左"的点阵*/{0x00,0x88,0xE8,0x1E,0xCA,0x08,0x08,0x40,0x48,0xC8,0x7E,0x48,0x48,0x48,0x48,0x00,0x00,0 x09,0x09,0x09,0x7F,0x09,0x05,0x00,0x10,0x13,0x22,0x72,0xCE,0x06,0x02,0x00},/*5以上为"转"的点阵*/{0x00,0x44,0x64,0xB4,0x94,0x84,0xFC,0x86,0x86,0xFC,0x84,0x84,0x94,0x24,0x44,0x00,0x00,0 x00,0x00,0x0E,0x0A,0x0A,0x0A,0x0A,0x0A,0xCA,0x4A,0x4A,0x7B,0x18,0x00,0x00},/*6以上为"弯"的点阵*/{0x00,0x10,0x10,0x10,0x10,0x90,0x70,0x1E,0x12,0x10,0x10,0x10,0x10,0x10,0x10,0x00,0x00,0x 08,0x08,0x04,0x43,0x7F,0x21,0x21,0x21,0x21,0x21,0x21,0x7F,0x00,0x00,0x00},/*7以上为"右"的点阵*/{0x00,0x00,0x08,0xC8,0xC8,0x08,0x08,0x08,0xF8,0x88,0x88,0x88,0x88,0x08,0x00,0x00,0x00,0x 20,0x20,0x3F,0x3F,0x20,0x20,0x20,0x3F,0x20,0x20,0x20,0x20,0x20,0x20,0x00},/*8以上为"正"的点阵*/{0x00,0x00,0x08,0x08,0x88,0xE8,0x38,0x0E,0x08,0x08,0xE8,0x08,0x08,0x08,0x08,0x00,0x00,0x 04,0x06,0x03,0x7F,0x20,0x21,0x21,0x21,0x21,0x3F,0x21,0x21,0x21,0x20,0x00},/*9以上为"在"的点阵*/{0x00,0x00,0x10,0x90,0xD6,0x30,0x80,0x80,0x08,0x08,0xF8,0x08,0x08,0x08,0xF8,0x00,0x00,0x 06,0x03,0x01,0x7F,0x03,0x47,0x64,0x30,0x0E,0x03,0x40,0x60,0x7C,0x1F,0x00},/*10以上为"初"的点阵*/{0x00,0x10,0xD0,0x3E,0x12,0xF0,0x10,0x40,0x70,0x58,0x46,0x40,0x50,0x70,0x60,0x00,0x00,0x 40,0x63,0x34,0x0E,0x1B,0x10,0x00,0x7E,0x22,0x22,0x22,0x22,0x7E,0x00,0x00},/*11以上为"始"的点阵*/{0x00,0x80,0xC0,0x30,0xFC,0x06,0x00,0x00,0x00,0xFE,0x80,0xC0,0x60,0x10,0x00,0x00,0x00,0 x00,0x00,0x00,0x7F,0x00,0x04,0x04,0x02,0x7F,0x41,0x40,0x40,0x60,0x30,0x00},/*12以上为"化"的点阵*/{0x00,0x20,0x10,0xF6,0x00,0x00,0x44,0x54,0x54,0x54,0x7E,0x54,0x54,0x54,0x44,0x00,0x00,0x 00,0x00,0x7F,0x10,0x08,0x00,0xFF,0x15,0x15,0x15,0x15,0xD5,0x7F,0x00,0x00},/*13以上为"请"的点阵*/{0x00,0x40,0x44,0xFC,0xFC,0x46,0x40,0x04,0xD8,0x40,0x7E,0x42,0x50,0xC8,0x04,0x00,0x00,0 x08,0x06,0x7F,0x7F,0x03,0x06,0x00,0xFF,0x09,0x09,0x09,0x49,0xFF,0x00,0x00},/*14以上为"稍"的点阵*/{0x00,0x00,0x38,0x08,0x68,0x48,0x48,0x4A,0x4E,0x48,0x48,0x68,0x08,0x38,0x00,0x00,0x00,0x 40,0xC1,0x41,0x21,0x1D,0x07,0x01,0x01,0x7F,0x41,0x41,0x41,0x71,0x21,0x00},/*15以上为"完"的点阵*/{0x00,0x00,0x00,0xF0,0x90,0x90,0x90,0x10,0x10,0xFE,0x10,0x12,0xD6,0x10,0x10,0x00,0x00,0x 40,0x78,0x0F,0x00,0x10,0x5F,0x40,0x60,0x37,0x1C,0x1F,0x61,0x40,0x60,0x00},/*16以上为"成"的点阵*/{0x00,0x10,0x18,0x46,0x46,0x7C,0x44,0x44,0xF0,0x5C,0x46,0x44,0x5C,0x14,0x04,0x00,0x00,0 x02,0x0A,0x0A,0x0A,0x2A,0x6A,0x0A,0x0B,0xCA,0x4A,0x7E,0x0A,0x0A,0x0A,0x00},/*17以上为"等"的点阵*/{0x00,0x00,0x10,0xCC,0x66,0x20,0x48,0x48,0x48,0x7E,0x4A,0x48,0xC8,0x48,0x40,0x00,0x00,0 x02,0x01,0x7F,0x00,0x02,0x02,0x0A,0x12,0x02,0x42,0x42,0x7F,0x02,0x02,0x00},/*18以上为"待"的点阵*/{0x00,0x80,0x60,0xFC,0x06,0x88,0xA8,0xA8,0xA8,0xAA,0xAC,0xA8,0xA8,0xA8,0x88,0x00,0x00, 0x00,0x00,0xFF,0x00,0x00,0x00,0x7C,0x24,0x24,0x24,0x24,0x24,0x7C,0x00,0x00},/*19以上为"信"的点阵*/{0x00,0x80,0x80,0xA0,0xBC,0xA4,0xA4,0xA4,0xA4,0xA4,0xA4,0xA4,0xBC,0x80,0x80,0x00,0x00, 0x00,0x00,0x00,0x04,0x07,0x04,0x04,0x44,0x44,0x44,0x74,0x1C,0x00,0x00,0x00},/*20以上为"号"的点阵*/{0x00,0xC0,0x70,0xFE,0x02,0x04,0x14,0x74,0x54,0x56,0x56,0x54,0x54,0x74,0x04,0x00,0x00,0x 00,0x00,0x7F,0x00,0x03,0x01,0x05,0x45,0x45,0x7D,0x05,0x05,0x05,0x03,0x00},/*21以上为"停"的点阵*/{0x00,0x00,0x00,0x00,0xE0,0x00,0x00,0x00,0xFE,0x40,0x40,0x40,0x40,0x40,0x00,0x00,0x00,0x 20,0x20,0x20,0x3F,0x20,0x20,0x20,0x3F,0x20,0x20,0x20,0x20,0x20,0x20,0x00}/*22以上为"止"的点阵*/};红外遥控器程序:#include<reg52.h>sbitir=P1^1;//红外输出//sbit P1_0=P1^0;sbit LED=P1^2;sbitqian=P2^1;sbithou=P2^2;sbitzuo=P2^5;sbit you=P2^7;bit flag;unsignedint flag1;//===================================== //MS延时函数//===================================== voiddelayms(ms){unsigned char i;while(ms--)for(i=0;i<120;i++);}//===================================== //定时器T0初始化//===================================== void T0_init(void){TMOD=0x02;TH0=0xe6;TL0=0xe6;EA=ET0=1;}//==================================== //定时器T0中断函数//==================================== void Timer0(void) interrupt 1{flag1++;if(flag) ir=~ir;elseir=0;}//===================================//数据处理//=================================== voidcend_data(unsigned char add,unsigned char dat) {unsigned char unadd,undat;unsigned char i;unsigned char bir;unadd=~add;undat=~dat;TH0=0xe6;TL0=0xe6;LED=~LED;flag1=0;flag=1;while(flag1<300); //9MS初始码flag1=0;flag=0;while(flag1<150);//4.5MS结束码for(i=0;i<8;i++) //发送用户码{flag1=0;flag=1;while(flag1<18);bir=(add>>i)&0x01;flag1=0;flag=0;if(bir==0x01) while(flag1<56); else while(flag1<18);}for(i=0;i<8;i++) //发送用户反码 {flag1=0;flag=1;while(flag1<18);bir=(unadd>>i)&0x01;flag1=0;flag=0;if(bir==0x01) while(flag1<56); else while(flag1<18);}for(i=0;i<8;i++) //发送数据码 {flag1=0;flag=1;while(flag1<18);bir=(dat>>i)&0x01;flag1=0;flag=0;if(bir==0x01) while(flag1<56); else while(flag1<18);}for(i=0;i<8;i++) //发送数据反码{flag1=0;flag=1;while(flag1<18);bir=(undat>>i)&0x01;flag1=0;flag=0;if(bir==0x01) while(flag1<56);else while(flag1<18);}flag1=0;flag=1;while(flag1<10);flag=0;}//============================= //主函数//============================= void main(void){T0_init();//TR0=1;LED=0;while(1){if(!qian==1&&zuo!=0&&you!=0)//前进{TR0=1;while(!qian==1&&zuo!=0&&you!=0) {cend_data(0x08,0x20);delayms(100);} TR0=0;LED=0;}elseif(!hou==1&&zuo!=0&&you!=0)//后退{TR0=1;while(!hou==1&&zuo!=0&&you!=0) {cend_data(0x08,0x30);delayms(100);} TR0=0;LED=0;}elseif(!zuo==1&&!qian==1)//前左转弯{TR0=1;while(!zuo==1&&!qian==1) {cend_data(0x08,0x40);delayms(100);}TR0=0;LED=0;}elseif(!you==1&&!qian==1)//前右转弯{TR0=1;while(!you==1&&!qian==1) {cend_data(0x08,0x50);delayms(100);}TR0=0;LED=0;}elseif(!zuo==1&&!hou==1)//后左转弯{TR0=1;while(!zuo==1&&!hou==1) {cend_data(0x08,0x60);delayms(100);} TR0=0;LED=0;}elseif(!you==1&&!hou==1)//后右转弯{TR0=1;while(!you==1&&!hou==1) {cend_data(0x08,0x70);delayms(100);} TR0=0;LED=0;}else //停止{TR0=1;cend_data(0x08,0x80);delayms(50);TR0=0;LED=0;}}}。
小车控制电路原理图
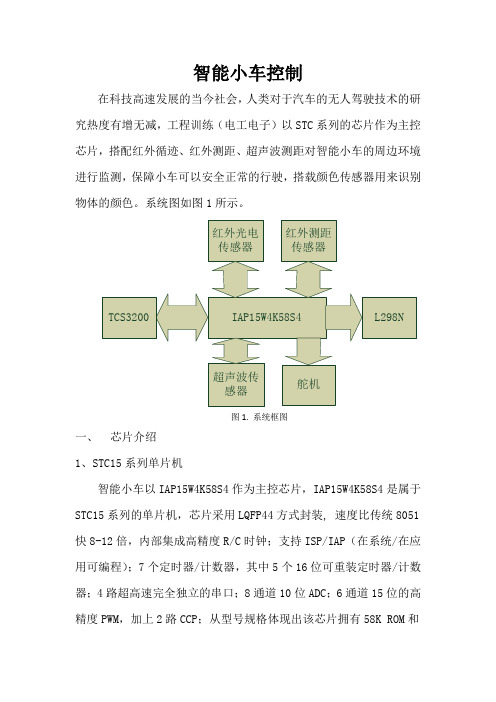
智能小车控制在科技高速发展的当今社会,人类对于汽车的无人驾驶技术的研究热度有增无减,工程训练(电工电子)以STC系列的芯片作为主控芯片,搭配红外循迹、红外测距、超声波测距对智能小车的周边环境进行监测,保障小车可以安全正常的行驶,搭载颜色传感器用来识别物体的颜色。
系统图如图1所示。
图1. 系统框图一、芯片介绍1、STC15系列单片机智能小车以IAP15W4K58S4作为主控芯片,IAP15W4K58S4是属于STC15系列的单片机,芯片采用LQFP44方式封装,速度比传统8051快8-12倍,内部集成高精度R/C时钟;支持ISP/IAP(在系统/在应用可编程);7个定时器/计数器,其中5个16位可重装定时器/计数器;4路超高速完全独立的串口;8通道10位ADC;6通道15位的高精度PWM,加上2路CCP;从型号规格体现出该芯片拥有58K ROM和4K RAM。
实物图如图2所示。
图2. IAP15W4K58S4实物图2、颜色传感器TCS3200颜色传感器TCS3200是TAOS公司推出的可编程彩色光到频率的转换器,采用8引脚表面贴装形式封装(如图3所示),它把可配置的硅光电二极管与电流频率转换器集成在单一的CMOS电路上,同时在芯片上集成四种不同的滤光器:红、绿、蓝(RGB)三种滤光器各16个,不带任何过滤器16个。
为了保证能够尽量减少入射光辐射不平衡,这64个过滤器是交叉排列,从而可以提高颜色识别率。
由于可以驱动标准的TTL或CMOS逻辑输入,所以可直接与MCU或其他逻辑电路相连接,并且可以直接输出数字量,并且能够实现每个彩色信道10位以上的转换精度,因而不再需要A/D转换电路,使电路变得更简单。
图3. TCS3200实物图TCS3200颜色传感器原理图如图4所示,利用三原色理,采集被测物的颜色,即各种颜色都是有三种颜色组成的,通过对芯片的S2、S3引脚编程选择不同的滤波器,它只能让某种特定的原色通过,经过电流到频率转换器后输出不同的方波,不同的颜色和光强对应不同频率的方波。
儿童遥控玩具车原理图

⼉童遥控玩具车原理图要求遥控车由遥控器和被遥控器车两部分组成,其中遥控器上五个控制键控制遥控车的运动,它们分别是前进、后退、加速、左转、右转这五个功能。
遥控器车通过接受遥控器发来的信号来完成相应的前进、后退、加速、左转、右转这五个动作。
同时⼩车在转向的时候亮对应的转向灯。
控制芯⽚的选择 SM6136/SM6135是专门为⽆线电遥控车设计的集成电路,性能稳定价格低廉。
SM6136芯⽚把按键信息编制成特殊的串⾏数字编码,经外围电路⾼频调制发射出去。
SM6135接收芯⽚接收经外围线路解调的编码信号,经芯⽚内部的解码电路解码后,送出相应的控制信号去控制⼩车的运⾏。
SM6136芯⽚管脚说明如表1所⽰。
SM6135芯⽚管脚说明如表2所⽰。
电路设计具体电路如上图、下图所⽰。
上图为发射原理图(遥控器部分),下图为接收原理图(遥控器车部分)。
图中的按键信息经SM6136芯⽚编码后由8脚发出,但编码电路产⽣的指令信号都是频率较低的电信号,⽆法直接传送到遥控⽬标上去,将指令信号载在⾼频信号(载波)上送到发射电路,才能由发射天线发送出去。
发射原理图中的Ql、Xl、L1、C2、C3构成了⾼频信号发⽣器,编码信号借助⾼频信号调制后通过发射回路经天线发射出去。
接收机由接收电路及译码电路组成,接收电路⼜包括⾼频部分及解调器部分。
由接收天线送来的微弱信号经接收机⾼频部分的选择和放⼤后,送到解调器。
本设计的译码电路就是由SM6135芯⽚来完成的。
执⾏电路把指令信号放⼤到具有⼀定的功率,⽤以驱动执⾏机构。
执⾏机构将电能转变为机械动作,是⽤来驱动电机的转动,从⽽实现对被控⽬标的转向、前进、后退等功能。
值得注意的是频率,防⽌多台遥控车在⼀起玩时因频率相同⽽相互⼲扰⽆法单独控制。
每个遥控器车都应当选择不同的频率进⾏控制。
在原理图中给出了⼏种不同频率段的元件参数,根据实际情况⾃由选择。
参数不是绝对的,要根据调试时的实际情况作细微调整,以便达到控制灵敏、控制距离长远要求。
SCTX2B(SCDRX2ES)(五功能遥控IC)

五、极限参数DC供电电压------------------------------------------------------------------------------- 1.0V~5.0V输入/输出电压------------------------------------------------------------------------------ GND-0.3V~+0.3V工作温度------------------------------------------------------------------------------------- -10℃~60℃贮藏温度------------------------------------------------------------------------------------- -25℃~125℃注:使用时,不要超出“极限参数”中所列数值范围,否则芯片可能会损坏。
如在“极限参数”所列的范围值下工作,也不应超出一定时间限度,否则即使不引起损坏也会影响产品使用寿命。
六、电气参数七、功能组合八、振荡频率调试(测试条件:VDD=3.0V, 电阻焊接位置如下图)SCDRX2ES之R OSC建议值=200K~220K,此时测得F OSC=115KHz~130KHz。
SCTX2BS之R OSC建议值=240K~270K, 此时测得F OSC=115KHz~130KHz。
注:调试发射频率时,主要以编码的最大频率为1KHz时为准(比如我司8个脚的发射IC就是以测编码输出频率为准)。
建议当RX用200K电阻时,TX用240K,当RX用220K电阻时,TX用270K。
频率与PCB布线长度、容性有一定关系,故以上给出的值通常是建议值,请以实际应用板测试为准。
十、封装信息。
遥控汽车电路图以及H桥电路rx-2b

SilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.291REMOTE CONTROLLER WITH FIVEFUNCTIONSDESCRIPTIONThe TX-2B/RX-2B is a pair of CMOS LSIs designed for remotecontrolled car applications.The TX-2B/RX-2B has five control keysfor controlling the motions(i.e.forward,backward,rightward,leftwardand the turbo function)of the remote controlled car.FEATURES*Wide operating voltage range(V CC=1.5~5.0V)*Low stand-by current*Auto-power-off function for TX-2B*Few external components are neededDIP-16DIP-14TX-2BRX-2BORDERING INFORMATIONPart No. PackageTX-2B DIP-14-300-2.54RX-2B DIP-16-300-2.54BLOCK DIAGRAMOSCIOSCORIGHTLEFTTURBOFORWARDBACKWARDPCSOSCDDTRANSMITTER TX-2B Block DiagramSilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.292BLOCK DIAGRAMLDBSIRIGHTLEFTTURBOBACKWARDFORWARDVDDRECEIVER RX-2B Block DiagramPIN CONFIGURATIONRIGHTTESTGNDACKWARDFORWARDTURBOSCPCLEFTFOSCOSCIOSCOV DDSORIGHTGNDBACKWARDFORWARDTURBOLEFTOSCIOSCOV DDVO2SIROB LDBVI1VO1VI2SilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.293ABSOLUTE MAXIMUM RATINGSCharacteristic Symbol ValueUnit Supply Voltage V DD0.3~5.0VInput/Output Voltage V IN,V OUT GND-0.3~V DD+0.3VOperating Temperature T OPR-10~65°CStorage Temperature T stg-25~125°CELECTRICAL CHARACTERISTICS1. TX-2B(V DD=4.0V,F osc=128KHz,T amb=25°C,unless otherwise specified.)Characteristic SymbolMinTypMaxUnit Operating Voltage V DD 1.5 4.0 5.0VOperating Current I DD---- 2.0mAStand-By Current I STB----10µADC O/P Driving Current I drive5----mAAC O/P Driving Current I drive5----mAAC O/P Frequency F audio0.5-- 1.0kHz2. RX-2B (V DD=4.0V,F osc=128KHz,T amb=25°C,unless otherwise specified.)characteristic SymbolMinTypMaxUnit Operating Voltage V DD 1.5 4.0 5.0VOperating Current I DD---- 3.0mAO/P Driving Current I drive1----mAO/P Sinking Current I sink1----mAEffect Decoding Frequency Variation F tolerance-20--20%PIN DESCRIPTION1. TX-2BPin No. Symbol Description1RIGHT The rightward function will be selected,if this pin is connected to GND2TEST This pin is used for testing mode3GND Negative power supply4BACKWARD The backward function will be selected,if this pin is connected to GND5FORWARD The forward function will be selected,if this pin is connected to GND(To be continued)SilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.294(Continued)Pin No. Symbol Description6TURBO The turbo function will be selected if this pin is connected to GND7SC Output pin of the encoding signal with carrier frequency8SO Output pin of the encoding signal without carrier frequency9V DD Positive power supply10PC Power control output pin11OSCO Oscillator output pin12OSCI Oscillator input pin13FOSC This pin is used for testing mode14LEFT The leftward function will be selected,if this pin is connected to GND2. RX-2BPin No. Symbol Description1VO2Inverter2output pin for power amplify2GND Negative power supply3SI Input pin of the encoding signal4OSCI Oscillator input pin5OSCO Oscillator output pin6RIGHT Rightward output pin7LEFT Leftward output pin8ROB Rightward function disable,if this pin is connected to GND9LDB Leftward function disable,if this pin is connected to GND10BACKWARD Backward output pin11FORWARD Forward output pin12TURBO TURBO output pin13V DD Positive power supply14VI1Inverter1input pin for power amplify15VO1Inverter1output pin for power amplify16VI2Inverter2input pin for power amplifySilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.295CODE FORMAT1. ENCODE RULE(A).Bit Format(W1is used for function codes,W2for startcodes)1KHzW11KHz50%Duty cycleW2500Hz75%Duty cycle(B).Date FormatW2W2W2W2(n)X W1W2W2W2W2(n)X W1W2W2W2W2W2W2W2W212341234W1W1W1W1W1W1W2W2W2n-thW2Number Of Function Code (N) W1 Function Key Decode Result4End Code10Forward Forward16Forward&Turbo Forward22Turbo Turbo28Turbo&Forward&Left Forward&Left34Turbo&Forward&Right Forward&Right40Backward Backward46Backward&Right Backward&Right52Backward&Left Backward&Left58Left Left64Right RightSilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.2962. ENCODE/DECODE TIMINGAny functionEncodeDecode outputTSIDecodeT=17ms+(nW1)x1msTESTING CIRCUIT(The oscillator frequency of TX-2B,RX-2B is128KHz,the oscillator resistor is160KΩand250KΩrespectively)SilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.297TYPICAL APPLICATION CIRCUITTRANSMITTERRECEIVERGNDSilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.298INFRARED APPLICATION CIRCUITTRANSMITTERRECEIVERSilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.299RECOMMENDED APPLICATION CIRCUITSilanSemiconductorsTX-2B/RX-2BHANGZHOU SILAN MICROELECTRONICS JOINT-STOCK CO.,LTDRev:1.02002.03.2910。
遥控小汽车电路图CD4017、HS0038

遥控小汽车电路图CD4017、HS0038
遥控汽车电路图
工作原理:附图是工作原理图。
IC1是红外接收头,平时IC1的{3}脚输出高电平,当接收到来自遥控器的红外信号时,{3}脚输出低电平。
这里不采用代码识别,遥控器可使用彩电、VCD、录放像机、DVD等的遥控器。
遥控汽车电路原理图:
遥控电机正反转电路图:
遥控小汽车音响电路图:IC3、IC4 (9300音频模块)
器件选择与原理:
元件选择见图注。
汽车可选带3V电机的普通玩具车,以买大一点的为佳,这样便于安装。
电池用4节7号充电电池,用胶带捆住,然后固定在车上。
红外接收头固定在车的最高处,以便提高接收灵敏度。
IC3也可选用机枪声、汽车喇叭声等音响电路。
<br />IC2只有Q0端为高电平,这时汽车停止不动。
按一下遥控器,红外接收头便接收到红外遥控信号,其{3}脚输出数码信号经C1平滑为直流低电平,BG1截止,IC2的{14}脚突变为高电平,相当于输入一个正脉冲,Q1端变为高电平,经D1、R4使BG2导通。
IC3是警笛音乐集成电路,其正极和触发极连在一起,BG2导通后,IC3得电工作,信号经BG3放大后使扬声器发出响亮的警笛声。
再按一下遥控器,IC2的Q2端为高电平,经D2使IC3继续工作,扬声器持续发声,又经R6使BG7、BG6和BG8饱和导通,电机正转,汽车前进。
第三次按遥控器,IC2的Q3端输出高电平,经D3、R5使BG5导通,语言电路IC4得电工作。
遥控汽车控制原理资料

组员:
原理图:
本电路有以下部分电路组成:
1.红外接收控制电路由红外接收头ICl、晶体管Vl、 电阻器Rl-R3、RlO、电容器Cl-C3和脉冲分配器 集成电路IC2组成。 2.音效/语音电路由音效集成电路IC3、语音集成电 路IC4、晶体管V2-V5、电阻器R4、R5和二极管 VDl-VD4组成。 3.驱动电路由晶体管V6-Vll、电阻器R6-R9和电动机 M组成。 4.电源电路由电池GB、电源开关S、滤波电容器C2、 C4、C5和电阻器R2组成。
结束
再见
本电路图用途: 本例介绍的遥控玩具汽车,采用彩色电视 机、影碟机等家用电器遥控器来控制其前 进与后退,前进时汽车发出警笛声,后退 时汽车发出"倒车,请注意!"的语音声,趣 味性较强,可用于改制各种电动玩具汽车。
工作原理:
1. 接通电源开关S时,IC1的3脚输出高电平,使Vl饱和导通,IC2的YO 端输出高电平,此时电动机M不工作,汽车停止不动。按一下遥控器 上任意键时,ICl接收到红外遥控信号并将其转换为电信号,该信号 经ICl内电路处理后从其3脚输出一个高电平脉冲,使Vl由导通变为截 止,从IC2的CP端输入一个计数脉冲,使C2的Yl端输出高电平,VDl 和V2导通,IC3通电工作,其O/P端输出的音效电信号经V3放大后, 驱动BL发出警笛声。 2. 再按一下遥控器,IC1的3脚又输出一个高电平脉冲,使V1瞬间截止, IC2的CP端又加入一个计数脉冲,其Y2端输出高电平,使V6。V8导 通,M正转,汽车前进;同时,VD2导通,IC3和V2、V3仍维持工作, BL仍发出警笛声。 3. 第3次按动遥控器按键时,IC2的Y3端输出高电平,Y2端变为低电平, VD2和V2、V3、V6-V8、1C3停止工作,M停转;同时VD3导通,使V5 导通,IC4通电工作,其O/P端输出的语音电信号经V4放大后,驱动 BL发出“倒车,请注意!”的语音声。 4. 第4次按遥控器按键时,IC2的Y4端输出高电平,使V9-Vll导通,M反 转,汽车后退;同时VD4导通,使V4、V5和1C4维持工作。 5. 第5次按遥控器按键时,IC2的Y5端输出高电平,IC2强制复位,YO端 输出高电平,M停转,BL停止发声,汽车停止不动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设为首页" 页 ┃ 电 力 ┃ 电 子 ┃ 电 工 ┃ 单片机 ┃ 传感器 ┃ 综合技术 ┃ 在线留言5功能遥控器PT8A977/978的应用双击自动滚屏发布者:admin 发布时间:2007-2-1 阅读:775 次作者:李 峻摘要:研究了具有优异性能的5功能无线遥控电路PT8A977/978的主要性能、内部电路结构特点以及控制逻辑关系,详细介绍了PT8A 977/978的典型应用电路及其电路工作原理。
关键词:PT8A977/978;编码;解码;伺服电机;遥控车1 引言玩具遥控车采用的是伺服电机无线遥控技术。
遥控电路设计的基本要求是高性能、低成本、运行平稳、控制灵活、线路简单、抗干扰能力强。
通常玩具遥控车的驱动要用两个微型直流伺服电动机来实现玩具遥控车的前进、后退、左转、右转和加速等功能。
玩具遥控车市场竞争的日趋激烈,对玩具遥控车的电气性能也提出了越来越高的要求。
玩具遥控车的无线遥控控制电路设计决定着玩具遥控车的整体性能。
文中给出了一种具有优异性能的迷你型玩具遥控车电路的设计方案,该方案主要采用PT8A977/978集成电路控制器来设计完成。
2 遥控车无线遥控电路普通玩具遥控车一般都具有前进、后退、左转、右转的基本功能,这些功能可分别由两台微型伺服电动机来完成,该电机没有调速功能。
无线遥控电路的原理方框图设计如图1所示。
该电路由无线发射和无线接收两部分组成,其中无线发射由编码电路和RF发射电路组成。
编码电路使用的集成电路型号是PT8A977,该电路具有5种编码功能,其中F/B用于控制伺服电动机的前进、后退;L/R用于控制伺服电动机的左转、右转;turbo用于加速。
无线接收电路部分的解码电路可以使用PT8A978集成电路芯片来完成,解调后的RF信号Solar Energy CharityHelping Relieve Poverty Though The Provision of Solar Energy. Join Us!Public Service Ads by Google在PT8A996中被放大和滤波,然后得到基带信号。
当系统在对该信号进行取样后,解码逻辑便可以提取F/B、L/R和来自接收信号的功能位,同时输出相应的前进、后退、左转、右转和加速功能所用的控制电平。
为了满足玩具遥控车的安全需要,同时还应为伺服电机设计过载保护电路。
3PT8A977/978的主要性能结构PT8A977/978是配套使用的无线遥控编解码集成电路,它们都有5个管脚,对应于5种编/解码功能。
根据外形封装的区别,PT8A977/978分别各有3种序列号,其系列产品如表1所列。
PT8A977/978具有遥控车的完整控制功能,它们的工作电压为2.5~5.0V,当无任何功能键按下时,芯片将自动断电,片上振荡器停止工作,从而减少工作电流。
该编/解码器的使用十分简单,应用时只需很少的几个外部元件即可构成一个完整的实用电路。
表1 PT8A977/978系列产品简介编码型号PT8A977BP PT8A977BW PT8A977BDE封装类型14脚DIP14脚SOIC裸片编码型号PT8A978BP PT8A978BW PT8A978BDE封装类型16脚DIP16脚SOIC裸片3.1编码电路PT8A977BP/977BW的性能结构编码电路的内部结构和外形封装分别如图2(a)和图2(b)所示。
由图可见:该编码器的内部主要由输入电路、编码电路、振荡电路、时序产生器电路和输出电路组成。
输入电路有5个输入管脚,分别与5个功能按键forward(前进)、backward(后退)、right-ward(向右)、leftward(向左)和turbo(加速)相对应。
芯片中的编码电路向SO和SC两个输出管脚发送数字码,数字码与定义的功能按键相对应,SO编码输出端用于无线遥控,而SC编码输出端则用于红外遥控。
芯片内时序电路中的一个计数器可使PT8A977BP/977BW具有自动断电功能。
其管脚PC输出端可用来控制外部工作电源的通、断状态。
按下任何一个功能按键都会立即使芯片激活。
编码器输出的编码格式和字格式分别如图3(a)和图3(b)所示。
在编码格式中,W1表示功能码,W2表示开始码。
PT8A977/977BW的管脚功能说明如表2所列。
表2 PT8A977BP/977BW的各管脚说明管脚号管脚名功能说明1Right带上拉电阻,如果这个管脚接地,则选择右转功能2Test带有上拉电阻,这个管脚可用于测试方式3GND电源负极4Backward带有上拉电阻,该脚接地选择后退功能5Forward带有上拉电阻,该脚接地选择前进功能6Turbo带有上拉电阻,该脚接地选择加速功能7SC带有载波频率的编码信号输出端,用于红外遥控8SO带有载波频率的编码信号输出端,用于无线遥控9Vcc电源正极10PC电源控制输出管脚11OSCO振荡器输出管脚12OSCO振荡器输如管脚13NC不连14Left带有上拉电阻,该脚接地选择左转功能3.2解码电路PT8A978BP/978BW的功能结构解码集成电路的内部电路结构和外形封装分别如图4(a)和图4(b)所示。
该解码集成电路比编码集成电路复杂得多,它内部主要由3组放大器、信号取样和误码检测、解码电路、控制逻辑电路、振荡器、时序产生器、锁存器、输出电路组成。
PT8A978BP/978BW有5个输出管脚,分别具有5种功能。
接收的信号由三级放大器放大后对其进行信号取样、误码检测和解码,以控制遥控车的动作。
编码和解码两种芯片的振荡器工作频率之间的相对误差必须小于±2.5%。
图5所示是具体编码和解码时序,该解码器的管脚功能说明如表3所列。
表3 PT8A978BP/978BW管脚说明管脚号管脚名功能说明1VO2放大器2输出管脚2GND负电源3SI解码信号输入管脚4OSCI振荡器输入管脚5OSCO振荡器输出管脚6Right右转输出管脚7Left左转输出管脚8RD带有上拉电阻,该脚接地选择右转功能9LD带有上拉电阻,该脚接地选择左转功能无效10Backward后退输出管脚11Forward前进输出管脚4 PT8A977/978的典型电路4.1 PT8A977BP/977BW在发射电路中的应用PT8A977BP/977BW在发射电路中的典型应用电路如图6所示,该电路使用9V电池供电,三极管Q1和Q2的工作电压均是9V,集成电路芯片的工作电压是4.7V。
当开关S1闭合时,发光二极管LED1导通发光,表示工作电源接通。
9V电压直接加到Q1、Q2上,同时经R2、D1组成的稳压电路可为芯片提供4.7V的工作电压。
电阻R1用来决定编码器内部振荡器OSC的振荡频率;按键开关L、R用于控制遥控车的左、右转;按键开关F、B用于控制遥控车的前进、后退。
三极管Q1与L1、X1、C3组成了一个电容三点式载波振荡器,该振荡器的工作频率可以是27MHz或49MHz。
编码器SO管脚输出的编码数字信号和Q1输出的载波信号同时加到Q2的基极后,经Q2调制,L3、C8、C9滤波后便由天线L4发射出去。
当载波频率为27MHz时,RF电路的元件参数则是:C3=47pF、C8=180pF、C9=47pF、R3=120kΩ、R5=15kΩ、L1=L2=2.2μH、X1=27.145MHz。
载波频率如果为47MHz,RF电路的元件参数是:C3=22pF、C8=100pF、C9=30pF、R3=68kΩ、R5=22kΩ、L1=L2=1μH、X1=49.860MHz。
12 Turbo加速输出管脚 13 Vcc 电源正极14 VI1 放大器1输入管脚 15 VO1 放大器1输出管脚 16VI2放大器2输入管脚4.2PT8A978BP/978BW在接收电路中的应用PT8A978BP/978BW在接收电路中的典型应用电路如图7所示,该电路使用的是6V电源电压,当电源开关S1闭合时,6V电压直接加在伺服电机M1和M2的两组全桥驱动器上,再经R10和稳压二极管D1降到3.3V,以作为RF接收电路和解码芯片的工作电压。
无线遥控信号经天线和Q1组成的RF电路接收后,将送至解码芯片的VI1输入管脚。
接收到的信号经芯片解码后可从管脚7Left、6Right、11Forward和10Backward脚输出功能信号以驱动两个全桥电机驱动器,从而使桥路上的驱动三极管交替导通以控制伺服电机的正、反转。
现以伺服电机M1为例:当解码芯片Forward管脚输出为高电平,Backward管脚输出为低电平时,Q2、Q6、Q5导通,而Q3、Q7、Q4关断,M1中的电枢电流为从右至左,此时M1应正转;反之,当解码芯片Forward管脚输出为低电平,Backward管脚输出为高电平时,Q2、Q6、Q5关断,而Q3、Q7、Q4导通,M1中的电枢电流从左至右,此时,M1应反转。
当接收电路的载波频率为27MHz时,RF接收电路的元件参数如下:C1=10pF、C2=47pF、C3=47pF、C4=3300pF、Q1的型号为C1815-Y、R1=150kΩ、R2=680Ω、L1=7T、L2=8.2μH;而载波频率为49MHz时,RF接收电路的元件参数如下:C1=15pF、C2=25pF、C3=10pF、C4=2200pF、Q1的型号C380-0、R1=180kΩ、R2=820Ω、L1=5T、L2=3.3μH。
| 打印本页| 关闭窗口。