自制遥控车转向机构设计说明书
JK出品单片机自制遥控小车设计(附程序和部分电路)

遥控车报告------JK出品车名:JK一号机学院:机电学院(JK)队员:李凯陈琦庄彬宾明摘要本课题设计的遥控玩具车主要有三大模块组成:无线发射模块、无线接收模块和驱动模块。
我们的设计以mega16芯片为核心,无线遥控发射/接收模块为apc220,驱动芯片为L298N。
驱动电动机正反转的电路连接无线遥控接收电路构成一个驱动模块驱动电动机的前进、后退、左转和右转和各种微调控制。
经过实践证明,我们的设计可以很好的实现题目给出的要求,并且在其要求上我们又进一步进行了完善,是设计具有更好的实用和参考价值。
关键字:mega16芯片L298N芯片apc220无线发射/接收1、总体设计方案简介遥控玩具车是根据无线信号传送原理来控制小车的前进后退和左右转向的。
一般,遥控玩具车都是有两组操纵控制按钮,一组是控制小车的前进(加速)和后退,另一组是控制小车的左右转向的。
在我们的设计中,我们是采用四个按钮开关(或摇杆电位器)来分别控制小车的前进、后退、和左右转向的。
此设计的遥控玩具车是以单片机mega16的uart异步通信模块控制apc220发出信号;另一块配套的apc220接收信号并传输给另一块mega16;L298N驱动芯片用来实现电动机的正反转。
动作的电路。
(附:选择apc220作为通信模块的原因)整体方案比较:红外线传输方向性强、传输距离短,蓝牙模块信号较稳定,但是传输距离短。
相比之下,APC220整体信号稳定,传输距离远且不受方向限制,抗干扰和灵活度有较大优势。
2、系统电路设计1、无线发送和接收模块电路图(1)控制发射按钮及部分必要外围电路 (2)无线通信电路(发射及接收) 测试结果分析:经测试,各模块工作正常,程序、电路和整体机构配合良好。
前轮驱动灵活,可基本代替舵机使用。
通信传输正常,传输距离可达500m ,且不受障碍物和方向的限制。
3、软件系统框图(1)发送模块软件框图 (2)接收模块软件框图3、核心程序代码(1)发送部分程序代码 #include <iom16v.h> #include <macros.h>#define uchar unsigned char #define uint unsigned int#define mclkchar key_down(void) //检验按键是否按下{DDRA=0X00;PORTA=0X0F;return (PINA&0X0F)==0X0F ? 0:1;}void delay(uint ms){uint i,j;for(i=0;i<ms;i++)for(j=0;j<1141;j++);}void uart_init(uint baud){UCSRB=0x00;UCSRA=0x00; //控制寄存器清零UCSRC=(1<<URSEL)|(0<<UPM0)|(3<<UCSZ0);//选择UCSRC,异步模式,禁止// 校验,1位停止位,8位数据位UBRRL=(mclk/16/baud-1)%256;UBRRH=(mclk/16/baud-1)/256; //设置波特率UCSRB=(1<<TXEN)|(1<<RXEN)|(1<<RXCIE);//接收、发送使能,接收中断使能SREG=BIT(7); //全局中断开放DDRD|=0X02; //配置TX为输出(很重要)}void uart_sendB(uchar data){while(!(UCSRA&(BIT(UDRE)))) ;UDR=data;while(!(UCSRA&(BIT(TXC))));UCSRA|=BIT(TXC);}void main(void){ uchar key;DDRD=0X02;DDRA=0X00;PORTA=0X0F;uart_init(9600);//PWM_initilize();。
10.遥控智能车(科学制作)沁阳一小

5.用长螺丝将铝块分别安装在两个牙箱 上,再把牙箱用中号螺钉固定在车身上。
6.将马达上连接好的两根红色导线和黑色 导线从车身后方十字孔中拉出,并安装上车轮。
7.将接收器上M+(绿色导线)与马达正极 (红色导线)连接在一起,M-(白色导线) 与马达负极(黑色导线)连接在一起。
8.将接收器上的B+(红色导线)与三节7号 电池盒正极(红色导线)连接在一起,B(黑色导线)与电池盒负极(黑色导线) 连接在一起。
我们的遥控智能车
遥控智能车的组成
接收天线
车轮 接收器
电池
万向轮
牙箱(含马达)
发射天线
发射器
电池
万向轮
实验材料:遥控智能车成品、普通车轮 实验目的:验证万向轮的作用 实验记录:
实验条件 万向轮 普通车轮 结论
实验现象 小车能够自动转弯 小车不能自动转弯 万向轮可以使小车自由转弯
总结
遥控智能车通过接收和发射信号来控制小车行进,以车头作为感
12.用自攻丝将发射器上的ANT(白色导 线)和发射器天线固定在黄塑板对应的位 置上。
13.用自攻丝将发射器和单节5号电池盒固 定在黄塑板相应的位置上。
14.将导线整理好,并装上电池。
15.把智能车上也装上电池,用遥控上的 按钮来控制遥控智能车。比一比,谁的车 跑的更快!
遥控智能车
(少儿六级)
遥控车大赛
两通遥控板
工作原理: 遥控智能车,是通过两通遥控板来 实现控制的。装在马达上的接收器和遥控 器上的发射器,通过相同频率传输和接收 信号来实现车子的前进和后退。车前的万 向轮可控制遥控车自由转弯。
齿轮传动的特点是: 认识齿轮传动系统
齿轮传动平稳,传动比 精确,工作可靠、结构 紧凑、效率高、寿命长, 使用的功率、速度和尺 寸范围大。
转向系统设计说明书

转向系统设计说明书转向系统设计说明书一、需求分析1.1系统简介本转向系统设计是为汽车制造企业设计的一款新型转向系统,包括方向盘、转向齿轮、转向杆等组件,用于汽车转向操作。
1.2系统功能本系统主要实现以下功能:(1)实现车辆转向操作;(2)提供灵敏度和舒适性,使驾驶员可以轻松驾驶;(3)确保车辆转向时的安全性。
1.3使用环境本系统主要用于汽车行驶时的转向操作,适用于各类车辆,包括小汽车、大型客车、货车、越野车等。
1.4系统需求(1)具有可靠性和耐用性;(2)转向灵敏度高,操控舒适;(3)保证转向操作安全;(4)可适应各种驾驶员的需求。
二、系统设计2.1系统架构本转向系统采用传统的齿轮传动转向系统。
主要包括方向盘、转向齿轮、转向杆等组件,在行驶过程中通过变换转向齿轮的位置,控制车轮的转向。
2.2系统组成本转向系统包括以下组件:(1)方向盘:由驾驶员操控,控制转向的方向。
(2)转向齿轮:连接车轮的转向轴,通过旋转控制车轮角度,实现左右转向操作。
(3)转向杆:将方向盘的旋转运动转换成转向齿轮的轴向运动。
(4)轴承:用于支撑转向齿轮,使其顺畅运转。
2.3系统工作原理当驾驶员通过方向盘控制转向时,方向盘传递力量到转向齿轮上,通过转向齿轮转动和转向杆的传动作用,使车轮转向。
其中,转向齿轮是通过齿轮副传动,将方向盘的旋转运动转换成轴向运动,控制车轮的转向角度。
2.4系统性能(1)灵敏度:驾驶员控制方向盘时,系统应能快速反应,确保车辆转向灵敏。
(2)舒适性:转向时不应有任何异响或抖动感,使驾驶员的操控更加舒适。
(3)可靠性:系统应具有较高的可靠性和耐久性,确保在各种路况下的转向操作安全。
三、结论本转向系统是一种新型的汽车转向系统,采用传统的齿轮传动技术,实现车辆转向操作。
系统整体性能较强,灵敏度高、舒适性好、可靠性强。
同时,本系统还具有可扩展性,在不断的设计应用和技术进步中,可为用户提供更多更好的服务。
转向操纵机构设计报告

实验一:可分离式汽车转向操作机构设计与三维CAD建模分析实验报告一、实验过程说明1、引言随着社会经济和汽车工业的发展,汽车变得越来越普及。
汽车转向管柱作为驾驶员操控汽车的重要部件,其安全性和可靠性显得尤为重要。
在汽车行驶的过程中,任何来自转向管柱的异响、卡滞和变形过大都会给驾驶员造成很大的心理压力,影响行车安全。
转向管柱主要包括转向轴总成、上柱管、管柱支架、紧定螺栓、拉脱锁、下柱管、下支架、旋铆销轴、锁定手柄等。
转向轴总成通常是上端加工有连接花键,用来安装方向盘;下端焊接有万向节总成,与转向器连接,实现转向扭矩的传递。
上、下柱管装配在一起,通过管柱支架和下支架安装在车架上。
拉脱锁与管柱支架通过注塑装配在一起。
它的作用是将驾驶员转动转向盘的操纵力传给转向器。
同时装有转向柱管安全装置和方向盘位置调节装置,分别是用于当转向轴受到巨大的冲击时产生轴向位移,使支架或支撑塑性变形来吸收冲击能量,防止驾驶人员因转向机构原因而受伤;以及因驾驶员身高不同,把握方向盘时要调整方向盘的高度来达到安全舒适的状态。
转向操作机构是汽车上不可或缺的一部分,其工作可靠性直接影响行驶安全。
本实验是根据机械原理,参考大众新桑塔纳转向操作机构参数,设计了转向操作机构的传动机构和动力机构。
并运用本课程所学的知识,基于UG建模软件对转向操作机构的机构零件进行结构设计和优化,然后运用ADAMS运动学仿真软件对转向操作机构进行仿真分析以及动画制作,对相关的参数进行分析,终完成本转向操作机构的简易设计。
2、可分离式机构设计方案与参数计算(1)设计方案根据网上查找的资料,转向吸能装置的设计方案一般有如下几种:①可分离式机构简图如图2.1所示。
此类转向操纵机构的转向管柱分为上下两段,当发生撞车时,上下两段相互分离或相互滑动,从而有效地防止转向盘对驾驶员的伤害,但转向机构本身并不包含吸能装置。
②网格管、波纹管变形吸能式机构简图如图2.2所示。
其转向操纵机构的转向轴和转向管柱都分成两段,上转向轴和下转向轴之间通过细花键结合并传递转向力矩,同时它们二者之间可以作轴向伸缩滑动。
遥控小车的设计说明
学号01081237密级工程大学本科生毕业论文遥控小汽车的设计研究院(系)名称:信息与通信工程学院专业名称:电子信息工程学生:洪生指导教师:付永庆教授2005年6月1 / 103工程大学本科生毕业论文遥控小汽车的设计研究院 (系):信息与通信工程学院专业:电子信息工程学号:01081237学生:洪生指导教师:付永庆教授2005年6月摘要根据题目要求,本设计采用2片AT89C52单片机构成主从式的控制系统,双机采用串行口进行通信。
红外遥控部分采用遥控车模专用编、解码芯片TX-2/RX-2,提高控制的可靠性;同时,在遥控发射端加入了用凌阳61板做的语音识别系统,能够完成语音遥控功能。
采用红外传感器进行里程检测;超声波传感器进行障碍识别;感光电阻辅以步进电机控制的转动机构进行光源方向的检测,并能用软件控制小车行驶到光源附近。
采用步进电机对小车的转向进行精确的控制,同时用红外传感器对转向的角度进行校正。
此外,采用四位LED数码管和若干LED发光二极管显示时间、行进的里程以与小车的各种状态;采用AT24C08串行EEPROM记录小车的行驶轨迹,并能按照所记录的轨迹自动行驶。
本次设计基于完备的软硬件系统,很好的实现了小车语音遥控、任意曲线行驶、路线记录与重放、自动查找光源、自动避障,里程统计并发出指示信息等功能。
关键词:单片机;超声波传感器;红外遥控;语音识别;凌阳61板ABSTRACTAccording to the topic, my designneeds to adopt two AT89C52 to form a control system of principal and subordinate. The communication between the two MCUis to adopt the serial port. Meanwhile, launch end join with insult male genital 61 sound recognition system that board make remotely, can finish the remote control function of the pronunciation, and it adopts the infrared sensor to measure the mileage; The ultrasonic sensor2 / 103carries on the obstacle to discern; Sensitization resistance complement in order to walk into whom electrical machinery control rotate organization carry on measuring,direction of the light source, The small car can go to the adjacent place of the light source with the software .The designadopts serial EEPROM of AT24C08 to write down the orbit of the car , and can repeat the route automatically which has been recorded.The Design is on the basis of the complete software and hardware system, and the small car has the function of sound remote control, following any curve, recording the route where it has gone, finding out the light source,etc…Keywords:MCU; AT24C08; sensor; SPCE061A目录第1章绪论 (1)1.1概述 (1)1.2设计要求与主要功能介绍 (1)1.2.1 手动控制功能 (2)1.2.2 自动寻找光源功能 (2)1.2.3 超声避障功能 (2)1.2.4 记录路线与重放路线功能 (2)1.2.5 声控功能 (3)1.2.6 其他功能 (3)1.3MCS-51系列单片机简介 (3)3 / 1031.4凌阳SPCE061A精简开发板简介 (5)第2章系统总体设计 (6)2.1系统功能模块的划分 (6)2.2单片机数目的选定 (6)2.3系统原理框图 (7)2.4系统软件主要特色 (7)2.4.1软件分层结构 (8)2.4.2多任务结构 (8)2.4.3消息驱动结构 (13)2.5本章小结 (15)第3章各模块的详细设计 (16)3.1 红外遥控模块的设计 (16)3.1.1 遥控模块的功能需求 (16)3.1.2 编解码芯片的选型 (16)3.1.3 遥控模块原理图 (16)3.1.4 遥控电路与语音识别模块的连接 (18)3.2 数码管、发光二极管显示模块的设计 (18)3.2.1 多位数码管扫描显示原理 (18)3.2.2 工作状态指示灯与转向灯的设计 (19)3.2.3 显示模块电原理图 (19)3.2.4 显示任务的软件设计 (20)3.3 声音提示功能的设计 (20)3.4 前轮转向模块的设计 (21)3.4.1 前轮转向的机械结构设计 (21)3.4.2 前轮转向中点校准功能的设计 (22)3.4.3 步进电机驱动芯片 (22)3.4.4 前轮转向任务的软件设计 (22)4 / 1033.5 后轮驱动模块的设计 (24)3.5.1 直流电机驱动芯片L298N (24)3.5.2 后轮驱动任务的软件设计 (25)3.6 里程检测模块的设计 (25)3.6.1 探头的选型与安装 (25)3.6.2 软件消抖与硬件消抖的比较 (26)3.6.3 里程检测任务的软件设计 (26)3.7 超声测距模块的设计 (27)3.7.1 超声测距的理论依据 (27)3.7.2 超声发射电路 (27)3.7.3 超声接收电路 (28)3.7.4 超声测距任务的软件设计 (29)3.8 光源方向探测模块的设计 (30)3.8.1 旋转机构设计 (30)3.8.2 亮度检测电路的选型与设计 (31)3.8.3 寻找光源方向任务的软件设计 (32)3.9 行驶路线的记录与重放模块的设计 (33)3.9.1 该模块的功能概述 (33)3.9.2 AT24C08串行EEPROM介绍 (33)3.9.3 存储记录的格式 (33)3.9.4 手动模式下记录行驶路线功能的软件设计 (33)3.9.5 重放行驶路线功能的软件设计 (34)3.10 双机串行通信模块的软件设计 (35)3.10.1 通信方式的选型 (35)3.10.2 双机串行通信的软件设计 (35)3.11 语音识别功能的设计 (36)3.11.1 凌阳语音压缩算法 (37)5 / 1033.11.2 语音识别模块的软件设计 (37)3.12 本章小结 (37)第4章系统软件的设计 (39)4.1 单片机的C语言程序设计简介 (39)4.2 系统的三种工作模式 (39)4.3 手动模式的设计 (40)4.4 自动寻找光源模式的设计 (40)4.4.1 功能分析 (40)4.4.2 寻找光源的策略 (41)4.4.3 自动寻找光源的软件设计 (41)4.4.5 该功能模块存在的一些问题 (41)4.5 走数字与路线重放模式的设计 (44)4.6 本章小结 (44)第5章系统的组装、调试和测试 (45)5.1 系统的组装、调试 (45)5.2 遥控距离的测试 (45)5.3 时间显示功能的测试 (45)5.4 里程显示功能的测试 (46)5.5 超声测障碍功能的测试 (46)5.6 走数字功能的测试 (46)5.7 行驶路线记录与重放功能的测试 (47)5.8 自动寻找光源功能的测试 (47)5.9 语音识别功能的测试 (47)5.10 本章小结 (48)结论 (49)致 (50)参考文献 (51)6 / 103附录 (52)7 / 103第1章绪论1.1 概述单片机以其强大的控制能力已经被广泛应用于诸多领域,配以各种接口传感器可以实现系统的智能化。
四通道遥控车制作
四通道遥控车制作
摘要:蜗杆减速使遥控车具有爬坡能力,双马达差速控制,使遥控车具有转弯漂移能力。
四通道无线遥控,令遥控车具有远程控制能力。
关键词:蜗杆双马达差速控制四通道无线遥控
1.实验部分
1.1主要材料
绿色面板四节电池盒两节电池盒接受板发射板大齿轮皮带轮电机蜗杆开关长螺丝 2.3*7螺丝轴架 3cm 轶轴 6cm铁轴电机夹车轮天线
1.2主要工具
改锥剪刀润滑油尖嘴钳
2.实验分析与讨论
2.1安装要点
安装完单根车轴后,请用手指快速拨动一下车轴,看看车轴是顺畅。
请注意让两边的塑料套都和铁轴架之间保持0.5-1mm左右的空隙。
2.2实践总结
在工程上,紧配零件和轴一块转动。
达到这个目的简单有效的做法就是:在设计零件的内孔时,孔径故意小于轴的直径,这种安装连接方式叫做过盈配合。
电路、遥控器接线时正极接正极,负极接负级。
电路连接过程中,在保证连接稳固的前提下,多余的导线都可以剪掉。
另外排线也要尽可能的整齐美观。
2.3重要组装说明
在两个电机的尾部,从下往上各安装一个2.3*10的长螺丝,螺丝出头的位置一定要顶在电机尾部的塑料突起,调节螺丝顶起电机尾部的程度,从而控制蜗杆和大齿轮的咬合程度,最终使电机前面齿轮完美咬合(过紧会导致电机卡住不转)。
实验二 模拟汽车左右转向灯控制
姓名学号班级单片机实验报告 姓名学号 班级时间 地点实验名称: 模拟汽车左右转向灯控制实验实验二 模拟汽车左右转向灯控制一、 实验目的通过采用单片机制作一个模拟汽车左右转向灯的控制系统,达到以下目的: 1、 熟悉C 语言的基本语句、复合语句、条件选择语句和循环语句的使用方法; 2、 了解顺序、选择和循环三种基本程序结构及结构化程序设计方法。
3、 掌握STC89C52单片机的程序烧录流程; 4、 帮助学生养成良好实验习惯。
二、实验要求安装在汽车不同位置的信号灯市汽车驾驶员之间及驾驶员向行人传递汽车行驶状况的语言工具。
一般包括转向灯、刹车灯、倒车灯、雾灯等,其中汽车转向灯包括左转灯和右转灯,其显示状态如下表所示:采用两个发光管来模拟汽车左转灯和右转灯,用单片机的P1.0和P1.1引脚控制发光二极管的亮、灭状态;用两个连接到单片机P3.0和P3.1引脚的拨动开关S0、S1,模拟驾驶员发出左转、右转命令。
P3.0和P3.1引脚的电平状态与驾驶员发出的命令的对应关系如表2.2所示:表2.2 P3口引脚状态与驾驶员发出的命令时间地点实验名称:模拟汽车左右转向灯控制实验实验二模拟汽车左右转向灯控制一、实验目的通过采用单片机制作一个模拟汽车左右转向灯的控制系统,达到以下目的:1、熟悉C语言的基本语句、复合语句、条件选择语句和循环语句的使用方法;2、了解顺序、选择和循环三种基本程序结构及结构化程序设计方法。
3、掌握STC89C52单片机的程序烧录流程;4、帮助学生养成良好实验习惯。
二、实验要求安装在汽车不同位置的信号灯市汽车驾驶员之间及驾驶员向行人传递汽车行驶状况的语言工具。
一般包括转向灯、刹车灯、倒车灯、雾灯等,其中汽车转向灯包括左转灯和右转灯,其显示状态如下表所示:表2.1 汽车转向灯显示状态采用两个发光管来模拟汽车左转灯和右转灯,用单片机的P1.0和P1.1引脚控制发光二极管的亮、灭状态;用两个连接到单片机P3.0和P3.1引脚的拨动开关S0、S1,模拟驾驶员发出左转、右转命令。
转向系统设计说明书
转向系统设计说明书一、引言1.1 项目背景转向系统是汽车安全驾驶的重要组成部分,用于控制车辆的转向操作。
一个稳定可靠的转向系统不仅能提高驾驶的安全性,还能提升驾驶的舒适性和操控性。
本设计说明书旨在详细介绍转向系统的设计原理、组成部分以及各功能模块的工作原理,为开发人员提供指导和参考。
1.2 文档目的本设计说明书的目的是提供一个清晰、详细的转向系统设计方案,以指导开发人员进行系统的开发和实现。
同时,本文档还可以作为后续维护和升级的参考资料,确保系统的稳定性和可靠性。
1.3 参考文档•ISO 26262:汽车功能安全性标准•车辆制造商的相关规范和标准1.4 定义和缩略词缩略词定义ABS Anti-lock Brake System(防抱死制动系统)ECU Electronic Control Unit(电子控制单元)CAN总线Controller Area Network(控制器局域网)HCU Hydraulic Control Unit(液压控制单元)HMI Human-Machine Interface(人机界面)二、总体设计2.1 系统架构转向系统主要由以下几个部分组成:1.转向传感器:用于检测驾驶员转动方向盘的角度和速度。
2.转向电机:根据转向传感器的信号,通过控制电机的转动,实现车辆的转向。
3.转向控制器:负责接收转向传感器的信号,根据算法计算转向电机的控制量。
4.供电系统:为转向电机和转向控制器提供稳定的电源。
2.2 功能模块2.2.1 转向传感器转向传感器负责检测驾驶员的转向动作,并将其转化为电信号传输给转向控制器。
其主要功能模块包括:1.转向角度检测:通过安装在方向盘旁的传感器,检测驾驶员转动方向盘的角度。
2.转向速度检测:通过检测方向盘转动的速度,判断驾驶员的转向意图。
2.2.2 转向电机转向电机是转向系统的核心部件,通过控制电机的转动实现车辆的转向。
其主要功能模块包括:1.转向力反馈控制:根据转向控制器的控制信号,调整电机的输出力以模拟驾驶员转向时的力感觉。
玩具遥控车的转向机构[实用新型专利]
![玩具遥控车的转向机构[实用新型专利]](https://img.taocdn.com/s3/m/45f905026294dd88d1d26b16.png)
专利名称:玩具遥控车的转向机构专利类型:实用新型专利
发明人:陈丰昌,杨广城
申请号:CN201220345221.9
申请日:20120716
公开号:CN202682783U
公开日:
20130123
专利内容由知识产权出版社提供
摘要:本实用新型涉及一种玩具遥控车的转向机构。
包括马达、马达牙、转向牙盘、左右转向配件、左右转向件、压件、拉簧、压盖、车底和车轮,马达牙与马达的中心轴连接,左右转向配件的一端分别与车底连接,其另一端连接拉簧,压件设置在左右转向配件之上,左右转向件下端其设置的纵向柱与车底铰接连接,左右转向件上端其设置的纵向柱与压盖铰接连接,左右转向件侧向其设置的纵向柱与转向牙盘两侧的孔槽铰接连接,左右转向件侧端其设置的横向柱分别与两个车轮固定连接,马达牙与转向牙盘上的牙条啮合,转向牙盘后下端设置的拉钉卡扣在右转向配件和左转向配件之间的缺口上。
其在传统拉簧式转向机构的基础上,简化了零件,优化了功能,达到更理想的转向效果。
申请人:广东高乐玩具股份有限公司
地址:515321 广东省揭阳市普宁市占陇加工区振如大厦
国籍:CN
代理机构:揭阳市博佳专利代理事务所
代理人:黄镜芝
更多信息请下载全文后查看。
筒易的摇控车转向制作方法
筒易的摇控车转向制作方法
摇控车转向制作:
一、准备几样必备工具
1. 螺丝起子:用于螺丝起子拆解LY筒易控制电路板和安装机械转向组件。
2. 电源:用于向摇控制电路板提供电源,实现LY筒易的摇控功能。
3. 电子元件:用于安装LY筒易控制电路板上所有的电子元件,简单的电子元件可以提供摇控车转向所需的动力。
二、步骤
1. 准备安装LY筒易电路板的电子元件:首先选择相应的电子元件,然后按照LY筒易控制车转向原理图附图把这些电子元件安装在LY筒易
控制板上。
2. 准备LY筒易控制电路板:用螺丝起子把LY筒易控制电路板安装在
摇控车转向机械装置上,注意位置要对应原理图上标注的位置。
3. 把电源连接到LY筒易控制电路板:把电源连接到LY筒易控制板,
使LY筒易控制电路板正常工作,使之能够实现LY筒易的摇控功能。
4. 测试摇控车转向:用手把摇控车转向机械装置摇晃并且观察车轮转
向情况,如果是正确的方向转向,说明LY筒易的摇控车转向制作完成。
三、注意事项
1. 电子元件的安装:电子元件的安装要精确,避免位置偏移和连接不
牢固,这会引起电路不正常工作。
2. 控制电路板位置调整:控制电路板安装位置要与原理图上标注的位
置一致,否则摇控车转向会出现不正确的情况。
3. 电源接线:要正确安装电源,并按照LY筒易控制电路板上的电源接口,将电源接线到正确的接口上。
4. 注意安全:动手前请务必检查安装完成情况,然后将电源仔细接线,勿拧橡皮擦,尽量避免接触高电压处触及电柜,以免发生意外。
遥控小赛车设计报告单

遥控小赛车设计报告单1. 引言遥控小赛车是一种远程操控的小型电动车辆,通常用于比赛或娱乐项目。
本设计报告单介绍了我们设计的一款遥控小赛车的具体结构、功能和技术实现方案。
2. 设计目标我们设计的遥控小赛车旨在满足以下目标:- 具有稳定的行驶能力,能够在不平坦的地面上行驶;- 操作简单,易于控制;- 具备高速行驶的能力,能够在赛道上快速转弯;- 具备耐用性,能够承受比赛中的碰撞和撞击。
3. 结构设计3.1 车身结构遥控小赛车的车身由轻质材料组成,以减轻整车重量,并提高车辆的速度和灵敏性。
车身采用流线型设计,以减少空气阻力,提高行驶稳定性和速度。
3.2 轮胎设计车辆采用专业赛车轮胎,具有良好的抓地力和耐磨性。
轮胎使用高弹性橡胶制成,能够适应不平坦的地面,并提供稳定的行驶。
3.3 悬挂系统悬挂系统采用独立悬挂设计,以提高车辆的稳定性和操控性。
每个轮子都有独立的悬挂装置,能够独立适应地面情况,并减轻对车身的冲击。
3.4 驱动系统遥控小赛车采用四驱设计,每个轮子都配备一个马达,提供足够的驱动力。
驱动系统采用电动机与齿轮传动,能够给车辆提供足够的动力,并确保高速行驶时的稳定性。
4. 功能设计4.1 遥控系统遥控小赛车配备了一套专业的遥控系统,可以通过遥控器对车辆进行操控。
遥控系统使用2.4GHz的无线信号传输技术,具有远程控制、高反应速度和抗干扰能力强等特点。
4.2 转向系统转向系统采用前轴手动转向设计。
通过遥控器上的转向杆,操纵前轮实现车辆的转弯动作。
转向系统采用高精度的传动装置,可实现精准的转向控制。
4.3 速度控制系统速度控制系统采用电子调速器,可以对车辆的速度进行精确调控。
遥控器上设置了速度控制杆,通过调整杆的位置可以实现不同速度的前进和后退。
4.4 灯光系统为了增加赛车的可视性和观赏性,我们还为遥控小赛车设计了一个灯光系统。
灯光系统包括前大灯和后尾灯,通过遥控器上的按钮进行开关控制。
5. 技术实现方案5.1 软件开发遥控小赛车的软件开发采用嵌入式系统开发技术。
自制遥控车转向机构设计说明书
课程设计任务书机制6班区焯荣200930510624课题名称:遥控车转向机构设计及加工课程设计目的:随着CAD/CAE/CAPP/CAM术的不断发展,其应用领域越来越广泛。
为了使学生更好地掌握CAD/CAE/CAPP/CA相关技术在设计及实际加工中的应用,特设计本课程设计。
本课程设计知识覆盖面广,涉及到机械制图学、机械工程材料、机械设计、制造基础、模具设计及制造、数控加工工艺学、三维设计软件、工程设计美学、人机工程学等专业基础理论课的知识,以及产品装配的实践能力。
通过本课程设计,学生能够熟悉应用所学知识结合先进的CAD/CAE/CAPP/CA软件解决工程实际问题的方法,初步掌握零件设计,模具设计及加工的方法和步骤,培养严肃认真的科学态度,提高对所学知识综合运用的能力,培养团结协作精神,为走向工作岗位奠定基础。
1.课程设计的主要内容:课题分析;CAD/CAE/CAPP/CAM件产品设计模块的综合应用;利用CAD/CAE/CAPP/CA相关软件进行装配模型、分析模型、加工模型、模具模型等的设计,包括相应的计算公式和计算的具体步骤;CAD/CAE/CAPP/CAM关软件在产品制造及模拟加工模块的综合运用。
整理课程设计说明书。
.、八、-刖言:国内外遥控车多以双舵机(一种步进电机)加连杆控制方向,应外一种中低级的模型车采用单舵机自动回正的方式控制方向。
采取双舵机垂直放置,带动连杆水平移动的方式改变车轮的转向角度,这种方式是目前最为广泛采用的机构。
其优点有1、采用双舵机增加了力矩,使得轮子的转向力大大增强。
2、结构稳定可靠。
3、精确性高,动作迅速。
缺点是:成本较高,相应的配置必须跟随机构的强度而进行升级提升。
如小车底盘要采用强度更高,韧性更好的材料,设计也要保证底盘两侧不会因为急速转向而破裂的情况等等。
此外还有机构复杂、制造困难等的不足之处。
此外,如市场上常见的玩具车例如“雷速登”等小型模型车,采用的是单个舵机控制系统。
遥控车实验套件
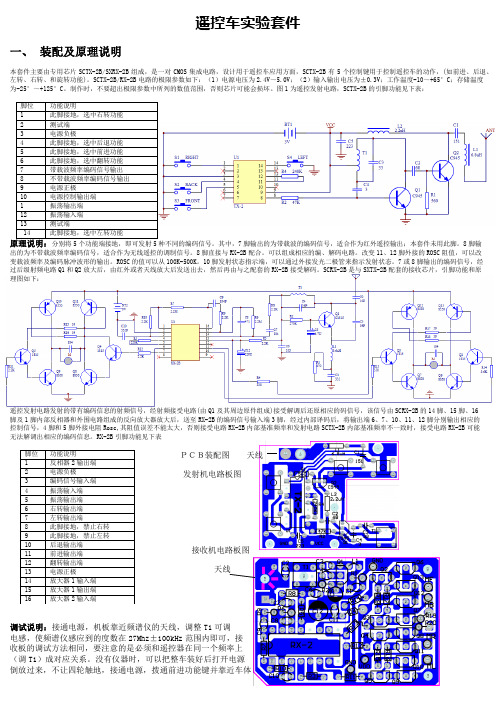
遥控车实验套件一、 装配及原理说明本套件主要由专用芯片SCTX-2B/SXRX-2B 组成,是一对CMOS 集成电路,设计用于遥控车应用方面,SCTX-2B 有5个控制键用于控制遥控车的动作,(如前进、后退、左转、右转、和旋转功能)。
SCTX-2B/RX-2B 电路的极限参数如下:(1)电源电压为2.4V ~5.0V ;(2)输入输出电压为±0.3V ;工作温度-10~+65°C ;存储温度为-25°~+125°C 。
制作时,不要超出极限参数中所列的数值范围,否则芯片可能会损坏。
图1为遥控发射电路,SCTX-2B 的引脚功能见下表:分别将5个功能端接地,即可发射5种不同的编码信号。
其中,7脚输出的为带载波的编码信号,适合作为红外遥控输出;本套件未用此脚。
8脚输出的为不带载波频率编码信号,适合作为无线遥控的调制信号。
8脚直接与RX-2B 配合。
可以组成相应的编、解码电路。
改变11、12脚外接的ROSC 阻值,可以改变载波频率及编码脉冲波形的输出。
ROSC 的值可以从100K-500K 。
10脚发射状态指示端,可以通过外接发光二极管来指示发射状态。
7或8脚输出的编码信号,经过后级射频电路Q1和Q2放大后,由红外或者天线放大后发送出去,然后再由与之配套的RX-2B 接受解码。
SCRX-2B 是与SXTX-2B 配套的接收芯片,引脚功能和原理图如下:遥控发射电路发射的带有编码信息的射频信号,经射频接受电路(由Q1及其周边原件组成)接受解调后还原相应的码信号,该信号由SCRX-2B 的14脚、15脚、16脚及1脚内部反相器和外围电路组成的反向放大器放大后,送至RX-2B 的编码信号输入端3脚,经过内部译码后,将输出端6、7、10、11、12脚分别输出相应的控制信号,4脚和5脚外接电阻Rosc,其阻值误差不能太大,否则接受电路RX-2B 内部基准频率和发射电路SCTX-2B 内部基准频率不一致时,接受电路RX-2B 可能无法解调出相应的编码信息。
汽车智能转向模块零件制作项目实训书
汽车智能转向模块零件制作项目实训书1.项目背景:随着科技的不断发展,汽车行业也在迅速进步。
智能驾驶系统作为汽车智能化的重要组成部分,对汽车转向模块的要求也日益提高。
为了满足市场需求,本项目旨在开展汽车智能转向模块零件制作的实训活动。
2.项目目标:掌握汽车智能转向模块的基本原理和工作原理;熟悉汽车智能转向模块的各个零部件,并了解其功能和作用;学习使用相应的工具和设备进行零件制作;完成汽车智能转向模块的组装和测试,确保其正常工作。
3.项目内容:3.1零部件选材和设计:研究现有的汽车智能转向模块的设计方案;根据要求选择合适的材料,并进行材料性能测试;设计各个零部件的结构和尺寸,确保其适应智能驾驶系统的要求。
3.2零部件制造:-使用CAD软件绘制零部件的工程图纸,并进行审查和修改;-使用CNC数控机床等工具,根据图纸进行零部件的加工和制造;-进行零部件的表面处理,确保其质量和外观。
3.3零部件组装和测试:根据装配图纸进行零部件的组装,确保正确性和稳定性;进行功能测试,包括转向角度、转向响应速度等指标的检测;检查并解决可能存在的故障和问题,确保汽车智能转向模块的正常工作。
4.实训计划:第一阶段:调研和学习阶段,了解汽车智能转向模块的原理和工作方式,研究现有的设计方案。
第二阶段:零部件制造阶段,包括材料选材、工程图纸设计、零部件加工和表面处理等工作。
第三阶段:零部件组装和测试阶段,进行零部件的装配和功能测试,解决可能存在的问题。
第四阶段:总结和评估阶段,撰写实训报告并进行项目总结和评估。
5.预期成果:完成汽车智能转向模块零件的制作和组装;实现转向模块的基本功能,并通过测试验证其性能;撰写实训报告,总结实训过程和成果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计任务书
机制6班区焯荣 200930510624
课题名称:遥控车转向机构设计及加工
课程设计目的:
随着CAD/CAE/CAPP/CAM技术的不断发展,其应用领域越来越广泛。
为了使学生更好地掌握CAD/CAE/CAPP/CAM相关技术在设计及实际加工中的应用,特设计本课程设计。
本课程设计知识覆盖面广,涉及到机械制图学、机械工程材料、机械设计、制造基础、模具设计及制造、数控加工工艺学、三维设计软件、工程设计美学、人机工程学等专业基础理论课的知识,以及产品装配的实践能力。
通过本课程设计,学生能够熟悉应用所学知识结合先进的CAD/CAE/CAPP/CAM软件解决工程实际问题的方法,初步掌握零件设计,模具设计及加工的方法和步骤,培养严肃认真的科学态度,提高对所学知识综合运用的能力,培养团结协作精神,为走向工作岗位奠定基础。
1.课程设计的主要内容:
课题分析;
CAD/CAE/CAPP/CAM软件产品设计模块的综合应用;
利用CAD/CAE/CAPP/CAM相关软件进行装配模型、分析模型、加工模型、模具模型等的设计,包括相应的计算公式和计算的具体步骤;
CAD/CAE/CAPP/CAM相关软件在产品制造及模拟加工模块的综合运用。
整理课程设计说明书。
前言:
国内外遥控车多以双舵机(一种步进电机)加连杆控制方向,应外一种中低级的模型车采用单舵机自动回正的方式控制方向。
采取双舵机垂直放置,带动连杆水平移动的方式改变车轮的转向角度,这种方式是目前最为广泛采用的机构。
其优点有1、采用双舵机增加了力矩,使得轮子的转向力大大增强。
2、结构稳定可靠。
3、精确性高,动作迅速。
缺点是:成本较高,相应的配置必须跟随机构的强度而进行升级提升。
如小车底盘要采用强度更高,韧性更好的材料,设计也要保证底盘两侧不会因为急速转向而破裂的情况等等。
此外还有机构复杂、制造困难等的不足之处。
此外,如市场上常见的玩具车例如“雷速登”等小型模型车,采用的是单个舵机控制系统。
其工作原理是控制小型舵机主轴转动相应角度,使得舵机臂摆动,细铁杆是连接舵机臂和圆盘的连接件,圆盘上有固定纵向的连杆一同旋转,最后是带动横向的连杆左右摆动实现轮子的转向。
并且底盘上设有两个限位点,目的在于不让轮子转向角度过大。
圆盘下方设置了回正弹簧,一旦舵机没有信号,圆盘自动回到初始状态,也就是车轮自动回正。
优点:机构相对简单;能实现快速转向快速回正;占据空间较少;成本低。
缺点:小型舵机力矩不足,小车在复杂地形难以转向;
基于两者的结构前提,还有考虑到成本、技术等问题。
可以吸收两者的优点设计一种既拥有大扭力的转向,又拥有简单结构的一种转向机构。
以下是使用PRO\E绘制的装配图及渲染图。
三个不同角度的爆炸图如下:
注释:白色为舵机,红色为舵机臂,黄色为长连杆,绿色的左右两个连接轮子的短连杆,灰色为小车底座。
该机构还制作了视频仿真,在文件夹中可以观看浏览。
重要零件工程图:
进行ANSYS分析:
整个杆件工作时,只受拉伸、压缩应力,当小车转向角度达到极位时,杆件的受力最大。
在允许范围之内,故零件安全。
使用PRO\E进行加工仿真如下:
加工使用的刀具类型是铣削,机床是3轴数控铣床,加工对象是杆件上表面。
课程设计总结:
从同学口中得知这一课程的有一定的难度,所以我带着打硬仗的思想开始了我的课程设计。
在开始的时候,都是给我们设计的要求说明书,可我还是无从下手。
从图书馆借来了指导书、从网上搜集了资料、翻看以往做过的动力小车设计,就这样开始了我的设计。
慢慢地向同学讨论各种问题,从相关手册查找相关信息,这样渐渐地从底盘、舵机到连杆完成了我的设计方案。
也就是在这样一个气氛中我画出了我图纸,写下我的说明书。
课程设计不仅是对前面所学知识的一种检验,而且也是对自己能力的一种提高。
每一个设计方案都不是一挥而就的,必须经过多次反复的修改和验证,才能最后真正写出完善的说明书。
通过这次课程设计使我明白了自己原来知识还比较欠缺。
自己要学习的东西还太多。
因为仅仅通过上课所讲的知识来完成这次设计是不可能的,之前从未接触过ANSYS软件,不懂如何对工件进行受力的分析,NC序列的操作也比较难懂等,这必须通过自学来熟悉这些软件的操作,又进一步提升了自我学习的能力。
通过这次课程设计,我才明白学习是一个长期积累的过程,在以后的工作、生活中都应该不断的学习,努力提高自己知识和综合素质。