控制软件操作(扩散炉带机械手)
大族扩散炉PM操作说明
第 1 页共 18 页
第 2 页共 18 页
第 3 页共 18 页
第 4 页共 18 页
第 5 页共 18 页
第 6 页共 18 页
第 7 页共 18 页
第 8 页共 18 页
第 9 页共 18 页
第 10 页共 18 页
第 11 页共 18 页
调节阀
第 12 页共 18 页
定位块
第 13 页共 18 页
机械手急
停按钮
第 14 页共 18 页
机械手复位提示
第 15 页共 18 页
桨高低位电机
桨前进后退电机
第 16 页共 18 页
大族扩散设备维护记录(月保养)
维护记录确认人:
备注:见每月的PM维护时间表,如与周保养重复做月保养优先
第 17 页共 18 页
大族扩散设备维护记录(周保养)
维护记录确认人:
备注:周保养时间见设备PM维护计划维护时间
第 18 页共 18 页。
扩散half automation的认识

舟不传动:在托盘位置,查看舟接近传感是否感应到;在shuttle位置,查看扩散炉与自动化的信号是否正常;舟定位传感是否将舟进行定位。
作者:香烟籴泪痕
--------------------------------------------图片来源于设备------------------------------------------------
公元2015.7.27
========扩散半截距设备的认识========
1、给设备上220V和24V的电源。红色旋钮为220V需要打到ON的位置;绿、红色按钮为24V电源开关;上电就按下绿色按钮,断开电源,按下红色按钮即可。
2、把电脑主机的门通过旋转钥匙将打开,通过按红色圈内的按钮给电脑上电。
3们使用上下料模式。
在手动状态下,切换到上下料模式,扩散完的硅片,到达上下料位置,应上一个空花篮或者前半花篮装满wafer(扩散过的wafer),后半花篮空的花篮,当cassettes到达上下料位置,排齐气缸整理片子后顶齿上升,两吸盘移动并取片,放入花篮中,即下料;下料后须上fill cassettes,顶齿上升,吸盘将花篮中的wafer放到顶齿上,顶齿下降,再次整理片子,即上料。如此往复循环,下完料后,花篮流到测方阻位置,小吸盘在设定好的位置取片进行测方阻。测完方阻的硅片流到皮带端头,生产人员将装满wafer的cassettes放到物流车上,达到一定数量,由物流人员推到出料窗口,并运送到下一个工段(二次清洗)。
花篮不传动:查看花篮状态;下方sensor是否误感应或有物体遮挡;按了STOP。
顶齿不上升:排齐气缸气太小;顶齿原点位置丢失(查看联轴器间距);电机是否脱落。
光伏电池制备工艺项目三-扩散(课堂PPT)

30
31
石英管清洗机 2 石英管清洗
32
2 石英管清洗
石英管清洗机控制面板
控制面板由开关.电 源按钮.急停和操作 面板组成。开机时 先开总电源,再按 电源开关。关机时 先按电源开关,再 关总电源。遇到紧 急情况时按急停按 钮,记住复位。
33
石英管清洗机控制面板操作方法
JO-1腐蚀槽进水 J1-1清洗槽进水 C0-1腐蚀槽排水 C1-1清洗槽排水 DO-1腐蚀槽转动 D1-1清洗槽转动 前:机械臂移动到腐蚀槽 中:机械臂停止 后:机械臂移动到清洗槽
❖ 4)把源瓶放入恒温槽(一般20℃左右),水位离源瓶 顶部1CM左右水位,确定装源瓶时不能带入纸屑等杂物(包
括贴在源瓶上的标签),以防把恒温槽循环泵的进出水口堵 塞,把进气管和出气管接好。
❖ 5)先在PLC控制面板上把小氮出气的电磁阀打开,把 源瓶出气阀慢慢的拧开,目的释放瓶内压力。
❖ 6)然后在PLC控制面板上把小氮进气的电磁阀打开, 设定小氮流量(500)。
❖ ④平抬起舟叉,朝上倾斜三十度(如图),将装载有硅片 的石英舟从碳化硅桨上面取下放到净化台上;
❖ ⑤ 并将下一批待扩散的硅片装入扩散炉中。
21
8 取片
❖ ① 操作员戴上橡胶手套或指套,口罩。 ②单晶取片方式:单手拿住硅片两边进行卸片,正面(扩散 面)朝上放置。 。 ③多晶取片方式:双手握住硅片的两边,将硅片从石英槽内 取出,及时放入泡沫盒内 ,每次卸片应控制在十片以内 。
(p型和n型)的半导体接触在一起就能形成的。要制造一 个p-n结,必须使一块完整的半导体晶体的一部分是P型区 域,另一部分是n型区域。也就是在晶体内部实现p型和n 型半导体的接触。
N
P
2
机械手POPCOM软件使用手册

机械手POPCOM软件使用手册内容:[1] 安装引导者[2 来自机械手控制器的 ] 预备的现在数据[3] 复位先前解救了对机械手控制器的数据[4] 直接的操作机械手控制器和机械手[5] 直接的修正机械手控制器数据[6] 修正各种不同的数据如你的计算机上的文件[7] 数据文件细节这份文件包含操作 POPCOM 窗口的引导者和补足的数据。
确定读这在使用这个软件之前的文件。
微软,窗口和窗口新台币是微软公司的商标。
所有的其他公司和产品命名提到是他们的分别拥有者的商标或注册的商标。
Sep.22 2006v1.13.0[1] 安装引导者预防(*)通常,分开软件组合应该被为每部计算机购买。
(*) 这个软件,帮忙和手册可能不 被部份用或再生或在他们的全部没有许可。
(*) 职责没被为可能由於~的结果使用这个软件,帮忙发生的任何情形接受或手册。
(*) 这个软件的规格 , 和包含在手册和帮忙的数据, 可能被更新没有注意。
(*)这种产品的内容被考虑完全适当和满意。
使用者应该有吗任何的问题或关心, 然而,有关被包含在帮忙和手册的这个软件或数据的事,请连络你的代理人。
(*)准备进入紧急状况停止输入因为保险箱当藉由使用自动的操作,步骤移动任何的桥操作,手册运动和痕迹操作。
有关 POPCOM 窗口这个申请是有帮助的软件为单一使成四倍桥机械手控制器和机械手。
这个申请能在下列各项方法中被用:(*)来自机械手控制器的后援现在的数据。
(*)先前回复解救了对机械手控制器的数据。
(*)直接的操作机械手控制器和机械手。
(*)直接的修正机械手控制器数据。
(*)修正各种不同的数据如你的计算机上的文件。
[机械手控制器的一个类型]单一桥:SRC , SRCA , ERC , SRCH , SRCH-E , ERCX , SRCX , SRCP , SRCD, ERCD SR1-X, SR1- P两倍的桥:DRC , DRCA , DRC-R , DRCH , DRCH-E, DRCX两倍的使成四倍桥:TRCH, TRCX包裹内容[装备磁盘片]唯读光盘[ 序列沟通电缆](选项)9 大头针– 25个大头针 (为 IBM-个人计算机/ 在或相容产品)P/N: KR7- M538F-100(为 POPCOM/VIP/杯子)P/N: KD4- M538F-010(为 POPCOM)备忘录1. 在大头针不之间有一个紧急状况停止信号输入。
项目4 搬运机械手控制演示课件
(1)单分支流 程:指动作顺 序是一步接着 一步地完成。
Page 4
(2)选择性分 支流程:指在 一步之后有若 干个分支等待 选择,而一次 仅能选择一个 分支。
Page 5
(3)并行性分支 流程:指在某一 个转移条件下, 同时启动若干个 分支,完成各自 相应的动作后, 同时转移到并行 结束的下一步。
Page 33
S0:初始状态 S20:下降 S22:上升 S24:下降 S26:上升
S21:夹紧 S23:右移 S25:放松 S27:左移
Page 34
Page 35
Page 36
(三)机械手的连续自动控制电路的设计、 接线与调试
1、任务要求分析: 当按下启动按钮,机械手执行一个完整动作周
期后,自动再次重复执行,不断循环。 当按下停止按钮后,只有在当前动作执行完毕
控制电路的设计 (3)单流程SFC程 (5)解决问题(项目实施)
与 调试
序的设计与调试
Page 1
SFC程序设计法
顺序功能图(简称SFC):是一种用于 描述顺序控制过程的图形说明语言。
SFC特点:科学、简单、易学、效率高 ;调试、修改和阅读方便。
Page 2
2、SFC图的种类
SFC图的三种基本形式 (a) 单分支流程 (b) 选择性分支流程 (c) 并行性分支流程
X5
Page 38
(2)I/O图设计
Page 39
3、SFC图设计
X0 X1 M0
M0
Page 40
Page 31
③夹紧工件后向上运动,直到上限位开关闭 合为止;
④再向右运动,直到右限位开关闭合为止; ⑤再向下运动,直到下限位开关闭合为止;
扩散CT炉子

1.5、输入XP操作系统用户“Operator”密码“?”,进入CMI计算 机的XP系统,自动启动CMI软件。
1.6、检查并打开气柜上1-4管“CESAR”的开关,启动“CESAR”系 统
1.7、 设定各管“Paddle”温度为默
CT扩散炉简单操作
培训内容
1、开机操作 2、生产操作 3、关机操作
1、开机操作
1.1、打开气柜压缩空气 的手动阀并调节调压 阀使其压力在6Bar左 右。
1.2、打开气柜氮气和氧 气手动阀,并调节调 压阀使其压力在2Bar 左右。
1.3、打开电气柜上的 “Main Switch”在 “ON”位置,设备上 电;CMI电脑自动启 动。
2.7、进入“Boat information”界 面, 在Actual boat location 位置选择“Slider”,在Boat state位置选择“Wait for tube”,再点击“Next”按钮。
2.8、进入“Process information”界面,选择相应 的运行工艺名,在“Lots in boat”中输入相关舟的信息, 再点击“Finish”按钮
6、按下恒温箱控制面板的“RUN” 按钮,使恒温箱停止工作,再 关闭黑色的电源开关。
7、退出CMI软件,关闭CMI电脑
3.8、关闭设备冷却水,先关进 水阀,再关出水阀。
3.9、关闭电器柜总断路器, 使设备断电。
3.10、关闭气柜的氮气、氧气和压缩空气的手动阀。
3.4、设定“Spike”温度到20℃。 按下 “Manual/T_Spike/All/Setpoi nt”,输入“20” 并按确认 “ENTER”。
刻蚀机机械手操作说明书

5.1机台有三种工作模式—‘Loading Only‘、‘Unloading Only‘、‘Loading/Unloading‘;
5.2根据生产情况如需更改工作模式,可先将机台设置在‘STOP‘状态,即确认机台上‘STOP‘灯处于常亮状态;点击左边的‘Option‘按钮,找到‘Loading Mode‘按钮
六、特殊情况或紧急情况处理
6.1如遇特殊情况或紧急情况需关闭机台请参照此项。
6.2双击操作界面左上角空白处,在跳出的窗口内输入密码‘12021’,点击确认;点击中间
的‘Shutdown’按钮,系统进行自动软关机。
6.3若GP检测软件未关闭,则关闭GP检测软件并在PC界面对电脑进行关机。
5.4确认所有三个屏幕都已黑屏,即表示系统软关机完成;到后面的电箱上把‘Main Swith’转到‘OFF’,即完成机台关机。
4.2将硅片从传递窗取出,确认硅片的类型及数量等内容,记录好硅片的数量。
4.3确保每次交班时在自动工作模式下对机械手进行’Initial Position’(机械初始化,密码为12021),若操作屏幕下方的’STOP’灯亮起则表示设备正常可以进行操作,否则请联系设备部检查。
4.4确认检测机操作界面上系统处于自动工作模式,点击’START’按钮,设备进入自动工作状态;同时确认GP检测仪已正确开启。
4.5确认设备后端的空花篮位置摆放正确(花篮位置摆放请参照花篮进口处的标识应与俯视花篮的正面形状一致,并按下’Inlet’按钮),花篮将自动进入机台。
4.6完成误及解决办法》,如果无法解决应即时告知设备部。
4.7每班作业完成后应填写《生产部各班扩散生产登记表》。
6.5机台开机时首先将设备背面电源控制柜上的‘Main Swith’转到‘ON’,等待5分钟后,机台软件系统将自动开机;点击软件界面上的‘Start Machine’按钮,进入系统后点击‘Option’按钮,找到‘Wafer Format’按钮并点击(硅片尺寸选择),选择硅片尺寸为‘156*156‘;最后进行机械复位,点击‘Initial’(机械初始化,密码为12021),若操作屏幕下方的’STOP’灯亮起则表示设备正常可以进行操作,否则请联系设备部检查。
PECVD详细介绍
PECVD操作简介
PECVD开机 打开N2阀。确认面板上绿色N2阀已打开。压力值为1kg
/cm2左右
N2阀
PECVD操作简介
PECVD开机
按压START真空泵启动按钮,启动真空泵。
START按钮
CBI按钮
PECVD操作简介
4
管式PECVD日常报警说明
Recipe abort2----process abort! TO continue: enter AB.
说明:工艺推出----运行终止。继续 输入AB。
对工艺异常确认输入AB后,会出现 第(一)个报警
5
管式PECVD日常报警说明
Vacuum tube out of 1st(2nd) tolerance. 说明:石英管内的真空度超过第一(二)个限
该状态为已经扳过90度pecvd操作简介pecvd开机pecvd的操作流程戴好无纺布口罩戴好洁净手套取来待镀膜的硅片在刻蚀处检查硅片数量把石墨舟推到洁净工作台下取出承片盒放入洁净工作台取出石英吸笔并擦拭干净把硅片一片片插入石墨舟内注意硅片的扩散方向一舟插完后用小车推到设备的上料口对计算机进行相应的操作后让其自动运行工艺结束镀膜结束开门退舟设备自动运行待报警后按退车按钮退车把装有石墨舟的小车推到冷却房内进行冷却冷却结束后把小车推到插片房内卸片结束后放入指定的承载盒内把放满的承载盒拿到丝网上料准备进行印刷开始卸片
是退出并重新运行工艺
10
管式PECVD日常报警说明
Recipe couldn’t de started. please check protocol for reason.。
扩散岗位作业指导书
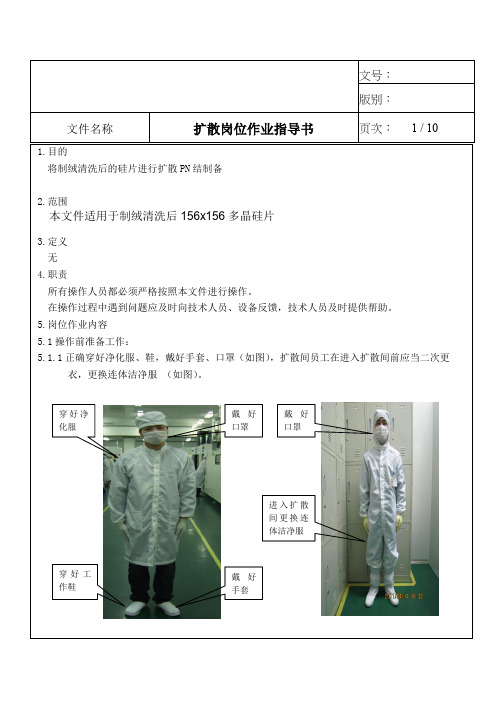
生产前工具的准备:石英舟、吸笔、下料垫、下料盒;打扫,首先用真空吸尘器对操作区域进行吸尘,用酒精布擦拭插片净化操作台,石英舟存放柜、吸笔、舟叉、黑色卸片盒、机器推舟平台、小推车、操作记录台、少子寿命测试仪、电阻测试仪;设备及测试仪器状态检查:扩散炉气体流量、温度、恒温箱温度、电阻测试仪、少子寿扩散炉压力表恒温水槽源瓶状态检查:源量2厘米以上符合扩散工艺要求;戴好口罩及乳胶手套,打开传递窗,检查硅片数量,双手拿起承载盒检查硅片有无碎片、隐裂,表面是否吹干,确认正常后,双手拿一盒把硅片从传递窗移至净化操作台上,承载盒按照扩散面(非开口方向)朝左统一放置,关闭传递窗口;操作人员调整承载盒,每两盒为一个单位,即非开口方向相反放置,用真空吸笔每槽两片顺序将硅片从左到右插入石英舟,插片动作轻、稳;同时左手扶住舟叉随时调整石英硅片插完后,用舟叉端起石英舟向上倾斜度左右将石英舟直接放到碳化硅桨上,先放在炉内位置,然后放在炉口位置,检查放置是否平稳。
(2、3、4步的操作步骤中只允许舟叉和真空吸笔接触石英舟和硅片)进舟扩散前选择正确的工艺号,打开确认工艺温度、流量是否正常,确认正常,点击确戴上洁净的乳胶手套在每舟中等间距抽取5片扩散后的硅片,充分冷却后放在四探针电。
I亮显。
按“下降”键使探针接触硅片中心点,换到校准工作电流后按“上升”键使探针脱离硅片,换到R档;测试电流156×156为4532mA;每4h校准一次工作电流,遇电流不稳情况,需多次校验;测量硅片中心方块电阻。
按“下降”键,待显示数字稳定后记录所测硅片位置的方块电阻,按“上升”键使探针脱离硅片,移动硅片换一个位置测量。
其中中心点方块电阻的测量要在中心附近多取几个点求平均值。
确认扩散后方块电阻及其均匀性是否在检验要求规定的范围内;为避免测试误差,边缘处的测试位置应离硅片边缘1cm,切不可在同一点反复测量;电阻少子寿命测试合格后,方可卸片,双手接触硅片侧面,每次最多八片将硅片卸到硅片盒内,扩散面交替叠放在硅片盒中;将卸好的硅片连同写好的流程卡放入刻蚀用传递窗;及时清理工作台面的碎片,保持装片和卸片工作台面及周围地面清洁;。
Centrotherm 扩散炉操作规程

内容
1.装片将来片装至石英舟上。
装片过程中,石英舟的斜度向左,将每两片正片插入同一插槽中方向从右向左。
并保证扩散面向外, 插片过程中严禁用手(包括戴手套)直接接触硅片绒面。
2. 上舟将以装好产品的石英舟放置于Slider上,如图所示:
3. 运行工艺
3.1点击Jobs,进入Jobs界面,确认tube状态并进入SETUP菜单
3.2选择BOAT LOT,可选择没有对号的Boat
3.3进入下个菜单如下.并进行如下选择,之后点击Next
3.4输入BOAT ID(石英舟架的编号),并选择wafer尺寸
3.5勾选run(运行)的炉管
3.6选择进货时炉管状态
3.7选择recipe ,根据工艺要求选择相应的recipe,然后点击Finish
3.8确认界面.确认之前设置无误,点击OK。
3.9点击Jobs返回Jobs菜单,点击RUN就可开始自动进炉扩散
3.10当RECIPE(程序)结束后会跳出如下对话框,点OK 机台自动运行UNLOAD(硅片出炉,冷却后下片)程序。
4.常见报警及处理方法:
5.设备故障汇报机制
接到设备故障报告后,现在技术员立即到现场处理维修,半小时内无法解决,当班技术员即时通知到机台责任工程师,工程师两小时内无法解决问题,则立即通知相应的设备主管,四小时无法解决问题,通知设备经理。
CT扩散炉培训教材(设备中英文版)

检测某个范围 内是否有物体, 避免出现撞舟 现象,些范围 可进行调节
Communication Network Overview 通信网络总览
position, as well as Tube = ready SLS = UP TGA = YES then operation.
8.机械臂运动时不要上料,以免上料时抖动机械臂撞到舟。
As mechanical arm movement not feeding,in order to avoid feeding time jitter mechanical arm hit the boat。
CT操作注意事项 CT operation matters needing attention
1.SLS处于“UP”位置时,管内有舟时不可手动进桨
SLS in the "UP" position, the inner tube has a boat can not be manually into the paddle. 2.SLS处于“DOWN”位置时,桨上有舟时不得手动进舟。
设备 平面结构Equipment plane structure
1、CMI电脑 2、Loading box
上料箱 3、Toxic gases
有毒气体排放 4、Furnace
炉体 5、Gas box
气源柜
Loading box上料箱 Baddle head 舟头
Loading wafer
加栽的硅 片
机械手控制器

对于海川机械手控制器的操作,需要遵循以下步骤:1.打开控制器电源:将电源开关置于“ON”位置,控制器将启动并开始运行。
2.登录控制器:在控制器面板上按下“菜单”键,然后输入用户名和密码以登录控制器。
3.配置机械手:在控制器面板上选择“配置”菜单,然后选择“机械手”选项。
在这里,你可以设置机械手的运动参数、速度、加速度等。
4.手动控制机械手:在控制器面板上选择“手动”菜单,然后选择“机械手”选项。
在这里,你可以通过手动控制机械手的运动,如移动机械臂、旋转关节等。
5.自动控制机械手:在控制器面板上选择“自动”菜单,然后选择“机械手”选项。
在这里,你可以通过编写程序来控制机械手的自动化操作。
6.调试机械手:在控制器面板上选择“调试”菜单,然后选择“机械手”选项。
在这里,你可以对机械手进行调试,如检查关节角度、速度等。
7.关机并断开电源:在完成操作后,将电源开关置于“OFF”位置,控制器将关闭并断开电源。
以上是海川机械手控制器的操作步骤,具体操作可能因型号和规格的不同而有所差异。
建议参考相关操作手册或联系制造商以获取更详细的信息。
1.操作海川机械手控制器时,务必确保遵循安全操作规程,避免因误操作导致设备损坏或安全事故。
2.在配置机械手参数时,需要根据具体应用场景和需求进行设置,确保设备能够高效地完成工作任务。
3.手动控制机械手运动时,需要注意控制力度,避免因操作不当导致设备碰撞或移动。
4.在编写程序进行自动控制机械手时,需要掌握编程语言及相应控制指令,以确保程序能够正确传达操作意图。
5.调试机械手时,需要先对设备进行全面的检查和测试,确保设备在良好的工作状态下运行。
6.操作完成后,建议及时关闭控制器电源,以延长设备使用寿命,并确保设备节能环保。
7.如遇到操作过程中出现的任何异常情况,应立即停止操作,及时与海川机械手控制器制造商或服务部门联系,以便得到及时的帮助和解决。
通过以上步骤,结合严谨的操作流程和相关注意事项,可以确保海川机械手控制器的正常使用和延长设备寿命。
扩散炉软件使用说明
目录软件使用说明 (3)1启动 (3)1.1启动 (3)2.进程管理 (3)2.1工艺信息 (4)2.2通讯 (4)2.3工作状态 (5)2.4报警显示 (5)2.5阀门及流量显示功能 (5)2.6推拉舟(机械手)状态显示 (6)2.7工艺控制 (7)3.工艺管理 (9)3.1窗口介绍 (9)3.2工具栏介绍 (10)3.4工艺(R E C I P E)编写步骤 (10)4.工艺表 (18)4.1控制温度表 (18)4.2P r o f i l e s修正表 (20)4.3工艺信息表 (21)5.实时曲线 (22)5.1曲线查看 (22)5.2工具栏 (23)6. 历史记录 (23)6.1查询历史数据 (23)6.2数据操作 (24)7.事件日志 (25)7.1基本操作 (25)8.用户管理 (26)8.1添加和删除用户 (26)8.2修改用户权限 (27)9串口配置 (27)9.1串口 (27)10扩散炉参数配置 (28)10.1P r o f i l e校验 (28)10.2舟位调整 (29)10.3流量计 (29)10.4报警参数设定 (30)10.5炉管名称修改 (31)11手动控制 (31)11.1温度控制功能 (31)11.2流量及阀门控制功能 (32)11.3机械手位置和速度控制 (32)11.4操作提示功能 (32)12 模拟显示 (33)12.1温度组态显示 (33)12.2气路组态显示 (33)12.3组态画面可修改 (34)12.4通讯参数可配置 (34)软件使用说明1启动1.1启动将计算机电源打开,启动计算机。
点击桌面“计算机工艺自动化管理系统”快捷图标,出现登陆画面(如图1.1)。
输入正确的用户名和密码,点击“确定”按钮即可登录到系统。
(提示:第一次登陆默认的管理员用户名为“a d m i n”,密码为空。
登陆系统后管理员可以更改密码,添加其它用户。
)下次登陆时,用户名栏中会自动填入本次登陆的用户名。
煤气阀门控制机械手工作原理
煤气阀门控制机械手工作原理
煤气阀门控制机械手是一种用于控制煤气阀门操作的自动化装置。
它通常由硬件和软件两部分组成,以实现精确的阀门控制和操作。
机械手的工作原理如下:
1. 检测信号输入:机械手通过传感器或外部控制系统接收煤气阀门的开关信号。
这些信号可以是手动输入,也可以是自动化系统发送的指令。
2. 处理信号:接收到信号后,机械手会将其传输到控制系统中进行处理。
控制系统可以是基于硬件电路或计算机软件的控制器。
3. 判断阀门状态:控制系统会根据输入的信号判断煤气阀门的当前状态,即开启、关闭或部分开启。
这可以通过传感器或位置反馈装置来实现。
4. 控制执行器:根据阀门状态判断,控制系统会向执行器发送指令,以执行相应的动作。
执行器通常由电动或气动装置组成,用于驱动阀门的开闭。
5. 反馈和监控:机械手会通过传感器或反馈装置监测阀门的位置和状态,并将信息返回给控制系统。
这样可以确保阀门操作的准确性和稳定性。
6. 系统保护和安全功能:机械手通常还具备一些保护和安全功能,以确保阀门操作的安全可靠。
例如,过载保护、防止误操作等功能。
通过以上工作原理,煤气阀门控制机械手能够实现对煤气阀门的精确控制,提高了操作的效率和准确性,同时降低了人工操作的风险。
它在煤气供应系统、工业设备和自动化生产中起到了重要的作用。
炉前多功能机械手遥控系统研究
炉前多功能机械手遥控系统研究
林瑶瑶;吴炫睿;刘宁;徐伟
【期刊名称】《有色设备》
【年(卷),期】2024(38)2
【摘要】针对传统工业冶炼炉耐火砖拆卸作业自动化水平低、危险性高等问题,为炉前多功能机械手研发了一套智能远程遥控系统。
采用Lora无线通信技术作为遥控器与拆砖机通信的无线协议,研发了无线收发模块,实现了远距离遥控,抗干扰能力强。
配置了18650锂电池,并设计供电电路为遥控器硬件系统供电,供电电压3.6 V,可长期稳定输出。
以ARM架构的STM32F103RCT芯片作为遥控器的主控制器,搭建了简洁高效的芯片外围电路,以及指令信号监测和滤波等辅助电路。
使用分段算法,将直接摇杆指令转换为既符合低速精确定位,又符合快速响应要求的实际指令信号。
该遥控系统已经应用到实际工程项目中,对提高工业冶炼炉耐火砖拆卸自动化水平具有重要意义。
【总页数】5页(P19-23)
【作者】林瑶瑶;吴炫睿;刘宁;徐伟
【作者单位】中国恩菲工程技术有限公司;东北大学机械工程与自动化学院;河南理工大学机械与动力工程学院
【正文语种】中文
【中图分类】TF35
【相关文献】
1.使用网络遥控渔船机械手的系统研究
2.基于PC104的遥控多功能水下机器人控制系统研究
3.一种多功能遥控机械手的研制
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DS-300A扩散炉控制软件操作一、系统设置1. < 系统设置> 画面2. 各部分功能2.01 温控方式设置2.01.01 根据温控表类型,若是山武的温控表,则选择“SDC串级控制”;若是RKC HA900的温控表,则选择“HA900串级控制”。
安装机器时设定2.01.02 若勾选【启用工艺运行升降温斜率跟踪】,则在勾选此项之后的时间内,可生成温度随时间向设定温度变化的曲线2.01.03 因扩散炉正常使用时所使用的温度在800~1050 o C,则在“最大温度设置”中设置1100。
安装机器时设定2.02 流量设置12.02.01 【大氮流量计初始化】将大氮流量计信号初始化。
在和流量计连接均正常的时候,点击此按钮,则无论是哪个流量计,均将此流量计的通讯地址初始化为大氮流量计。
流量计通讯紊乱时使用2.02.02 【小氮流量计初始化】参照上述【大氮流量计初始化】。
流量计通讯紊乱时使用2.02.03 【小氧流量计初始化】参照上述【大氮流量计初始化】。
流量计通讯紊乱时使用2.02.04 注意事项2.02.04.01 在N(N<=3)个流量计的电源线和通讯线均未断开的情况下,错误点击某个流量计(M流量计)初始化按钮,则将此N个流量计均初始化为M流量计2.02.04.02 点击工控机上的流量计初始化按钮时只能有其对应的流量计的通讯线接上。
当流量计通讯紊乱时,需要将流量计初始化时,先将所有的流量计断电,并将通讯线断开,然后将所有流量计上电,待流量计预热完成(依次亮灯:红-黄-红-黄),然后将某个流量计的通讯线接上,点击工控机上对应的流量计初始化,接着拆掉此流量计的通讯线,接另外一个流量计的通讯线,并点击其对应的流量计初始化按钮,依次类推。
当各个流量计分别初始化通讯正常后再将所有流量计的通讯线接上。
2.03 舟位置设置2.03.01 【舟平移起点】设置推舟的平移原点位置。
当推舟处于平移原点位置时,炉口传感器不能检测到有舟(即PLC的X31始终显示有信号输入)。
设置“0”。
调软着陆时设定2.03.02 【舟平移终点】在浆上有石英舟的情况下,当浆进入炉管,且电极头能与石英舟的电极孔接触良好(电极头插入电极孔最长距离)时,推舟距离平移原点的位置。
设置在“2060”左右(当浆的安装位置和平移原点位置不同时有偏差)。
调软着陆时设定2.03.03 【舟上升位置】在浆上有石英舟,且浆能正常进入炉管时,此时推舟距离上下原点的位置。
设置在“25”左右(在定位和安装炉管时不能确保所有机器一致,因此会存在偏差)。
调软着陆时设定2.03.04 【舟下降位置】设置推舟的上下原点位置。
设置“0”~“0.2”。
调软着陆时设定2.03.05 【实际舟后位置判断】在所设置位置上下偏差30mm的范围,如果炉口传感器没有检测到浆上有舟,则认为浆上舟状态有误,禁止继续运动(出片出浆和进片进浆时,认为有拖舟状况)2.03.06 【复位平移原点】点击此按钮,则推舟以300的速度从靠近炉口向工控机方向运行,当到达原点光电开关时,停止运动2.03.07 【复位上下原点】点击此按钮,则推舟以50的速度从上往下运行,当到达下限位光电开关时,停止运动2.03.05 注意事项2.03.05.01 调软着陆时,可以将平移马达和推舟断开,手动将石英舟推入炉管,并同时调节平移行程。
2.03.05.02 【复位平移原点】和【复位上下原点】时,若原点光电开关损坏,则推舟会一直运行,因此,必须将机械限位的限位块安装好。
禁止推舟撞到机械限位时电机继续长时间运转,因为长时间运行会导致损坏电机2.04 报警设置2.04.01 【流量偏差报警】设定百分比数值N,和流量延时报警配合起作用。
当要求的流量和流量计检测到的实际流量的差值超过设定的N,则会出现报警。
设置“5”。
2.04.02 【源量使用次数报警】设定数值N,自动累积的磷源使用次数达到设定值N时,在< 手动操作> 的黄灯报警中出现【源瓶工艺过次数(提示)】报警。
每次工艺结束,则系统自动将石英管使用次数和磷源使用次数自动加“1”2.04.03 【炉管使用次数报警】参照【源量使用次数报警】2.04.04 【平衡压力偏差】检测到的炉管内的压力和所设定的压力之间的偏差值不能超过设定的此数值2.04.05 注意事项2.04.05.01 当流量偏差报警设置“0”时,默认为关闭“流量偏差报警”,此时,无论要求的流量和流量计检测到的实际流量偏差多大,均无流量偏差报警2.05 舟初始运动2.05.01 【舟到平移起点】使推舟运动到设定的平移原点数值位置处2.05.02 【舟到平移终点】参照上述【舟到平移起点】2.05.03 【舟到上下上位】参照上述【舟到平移起点】2.05.04 【舟到上下下位】参照上述【舟到平移起点】2.05.05 注意事项2.05.05.01 使用“舟初始运动”中的操作时,当编码器计数值到达各个设定数值,无论推舟有没有到光电开关检测到的位置,推舟运行均结束2.06 流量设置2.06.01 【大氮量程】设置N2流量计的量程。
检查气源柜处N2流量计上标注的量程,设置的数值和标注的数值一致。
安装机器时设定2.06.02 【小氮量程】参照【大氮量程】2.06.03 【大氧量程】参照【大氮量程】2.06.04 【小氧量程】参照【大氮量程】2.06.05 【恢复流量计流速单位+设置软启动】2.06.05 【小氮流量积累清零并重新开始累积】2.06.06 注意事项2.06.06.01 设置的各个流量计的量程和实际流量计上标注的量程必须一致,否则会出现流量计流量计量不准确的情况2.07 机械手选择当勾选【允许脱离上下舟机械手】时,控制软件可作为单独系统运行(相当于不带机械手的扩散炉,此时需要桨上舟检测光电开关均检测到桨上有舟)。
使用此功能的情况多为:当机械手故障,需要做工艺时,手动将石英舟放置于桨上2.08按钮2.08.01 【管理员登陆设置】用于修改密码2.08.02 【管理员锁】将屏幕锁定,除运行工艺按钮(RunSelect),其余动作均禁止2.08.03 【舟状态确认】更改当前石英舟在浆上和炉管内的状态2.08.04 【手动弹起按钮】当某个按钮按下后不弹起时可用2.08.06 【系统设置保存】保存数据2.08.07 注意事项2.08.07.01 更改当前石英舟状态(管内是否有舟、浆上是否有舟)时,必须打开炉门确认炉管内是否有舟2.08.07.02 若一段时间不使用机器,禁止将石英舟放入炉管2.08.07.03 长时间未使用的炉管,在使用之前,必须打开炉门,确认炉管内是否有石英舟2.08.07.04 在< 系统设置> 中更改了参数之后,必须点【系统设置保存】,否则,更改的参数不起作用二、手动控制1. < 手动控制> 画面2. 各部分功能2.01 手动设置2.01.01 【温度设置】工控机上的5个温度设定和5个温控表以及炉体的5个温区是一一对应的(即左手机和右手机在工控机上的5个温度是相反的)2.01.02 【阀门与流量设置】控制各个气动阀的打开与关闭,和< 系统设置> 画面中的【阀门设置】对应2.01.02.01 【大氮】勾选此处,则打开【大氮】气动阀。
在其下方输入流量,并点击【单项输出】,则可以打开大氮流量计2.02.01 【管内温度检测】通过内偶检测石英管管内5个温区的温度。
2.02.02 【管壁温度检测】通过炉体上的外偶检测靠近石英管管壁的5个温区的温度。
2.02.03 【温度控制选择】【外控】:依靠外热电偶控制温度;【内控】:依靠内热电偶控制温度2.02.04 【大氮】显示从大氮流量计流过的气体流量,通过大氮流量计检测2.02.04 【扩散氮】参照上述【大氮】2.02.05 【清洗氮】和【扩散氮】流量显示同步,当有扩散氮流量输入时,也有相等流量的【清洗氮】输入。
【扩散氮】和【清洗氮】通过同一个流量计输出流量2.02.06 【大氧】参照上述【大氮】2.02.07 【小氧】参照上述【大氮】2.02.08 【平衡压力】依靠“压力传感器”检测到的炉管内的压力2.02.09 【净化风机】同一台机器,勾选任何炉管的“净化风机”,均可启动净化风机2.02.10 【请求上舟】送入“上舟”信号到机械手PLC,机械手自动将石英舟放置于桨上。
勾选此处的条件:推舟处于“后限位”和“上限位”光电开关处,2个桨上舟检测光电开关均未检测到桨上有舟。
机械手执行从片台取舟放到桨上动作的条件:推舟处于“后限位”和“上限位”光电开关处,2个桨上舟检测光电开关均未检测到桨上有石英舟,片台上有“待工艺舟”(系统自动逻辑识别的未做工艺的石英舟),机械手2轴和3轴均处于原点位置,机械手抓手上光电开关均未检测到有舟2.02.11 【请求下舟】送入“下舟”信号到机械手PLC,机械手自动将桨上的石英舟取下,放置于片台。
勾选此处的条件:推舟处于“后限位”光电开关处,2个桨上舟检测光电开关均检测到桨上有舟。
机械手执行从桨上取舟放到片台上动作的条件:推舟处于“后限位”光电开关处,2个桨上舟检测光电开关均检测到桨上有石英舟,片台上“无舟”(片台左右检测开关均未检测到有舟:机械手PLC的输入端X46和X47均无信号输入),机械手2轴和3轴均处于原点位置,机械手抓手上光电开关均未检测到有舟2.05红灯报警2.06.01 【平移驱动器数据错误】2.06.02 【浆上舟状态异常】当前舟状态和推舟所处位置不合适。
出现此报警时,三色灯上有红灯和蜂鸣器,控制软件上有“红灯”和“×”提示。
可能原因:1、推舟处于上限位,但编码器计数为“0”,舟状态显示“浆上有舟”(为按下“急停”按钮所致:因按下“急停”按钮后,上下编码器和平移编码器的计数值均清零),此时,可先在< 系统设置> 画面的【舟状态确认】中更改当前舟状态,为“管内无舟、浆上无舟”,然后点击【复位上下原点】,再将推舟运行到上限位,最后重新确认石英舟状态“浆上有舟、管内无舟”;2、推舟处于下限位,舟状态显示“浆上有舟”(在浆上有舟的情况下手动操作推舟运行到下限位所致),此时,可先在< 系统设置> 画面的【舟状态确认】中更改当前舟状态,为“管内无舟、浆上无舟”,然后将推舟运行到上限位,再重新确认舟状态“浆上有舟、管内无舟”。
更换PLC后,需要先将推舟复位上下原点!2.06.03 【温控仪连接障碍】温控仪和工控机之间的通讯断开。
可能原因:1、温控仪和工控机之间的通讯线断开(可检查是否有插头脱落);2、温控仪参数设置错误(可参照说明检查温控仪参数设置);3、温控仪损坏(可另换一个温控仪)2.06.04 【平移马达连接障碍】平移马达和工控机之间的通讯断开。