松下A4数字交流伺服安装调试说明书
Minas A4系列交流伺服驱动器使用指南
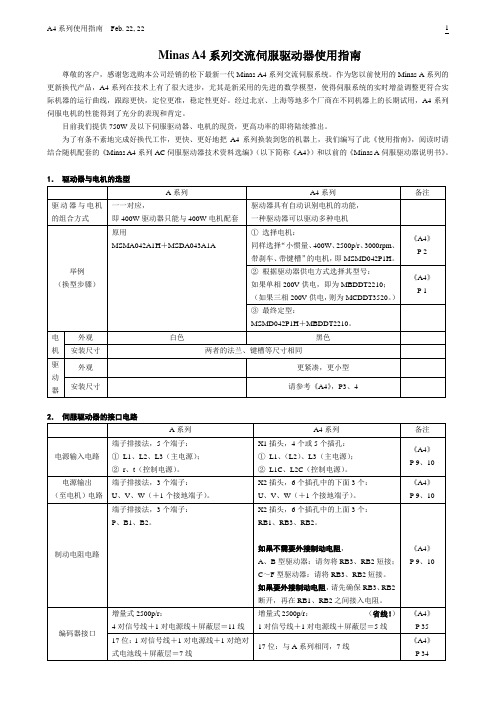
Minas A4系列交流伺服驱动器使用指南尊敬的客户,感谢您选购本公司经销的松下最新一代Minas A4系列交流伺服系统。
作为您以前使用的Minas A系列的更新换代产品,A4系列在技术上有了很大进步,尤其是新采用的先进的数学模型,使得伺服系统的实时增益调整更符合实际机器的运行曲线,跟踪更快,定位更准,稳定性更好。
经过北京、上海等地多个厂商在不同机器上的长期试用,A4系列伺服电机的性能得到了充分的表现和肯定。
目前我们提供750W及以下伺服驱动器、电机的现货,更高功率的即将陆续推出。
为了有条不紊地完成好换代工作,更快、更好地把A4系列换装到您的机器上,我们编写了此《使用指南》,阅读时请结合随机配套的《Minas A4系列AC伺服驱动器技术资料选编》(以下简称《A4》)和以前的《Minas A伺服驱动器说明书》。
1.驱动器与电机的选型2.伺服驱动器的接口电路3.驱动器的控制信号接口(X5插头)4.驱动器的显示面板与操作方法A4系列的显示面板、按钮布局与A系列一样,操作方法也一样(见《A4》P65)。
但A4系列新增了以下几个主要内容,对于现场调试和排除故障很有益:A4系列具备与A系列一样的“电机试运转JOG功能”、“常规自动增益调整功能”、“报警清除功能”、“自动零漂调整”、“编码器清零功能”;而且新增了一个用于位置控制模式时提高实时增益调整精度的“适配增益调整功能”,(见《A4》P71、78)。
5.驱动器的参数设置A4系列的参数设置方法与A系列一样。
各参数的号码、功能与含义基本相同;新增的和变动的参数主要如下表所列:注:P——位置控制,S——速度控制,T——转矩控制,F——全闭环控制。
6.A4系列伺服系统增益调整步骤1)与增益调整有关的参数,建议采用驱动器的出厂设置,观察机器性能是否满意。
如果不能得到较好的响应性能,请参照2)。
由于A4系列伺服驱动器适应范围大大增强,使用A系列伺服的用户原则上可以直接使用原来的参数而不需要重新调整。
松下伺服设置
18 指令脉冲禁止输入 无效设定
【 19
读取设定
分 20 位置设定单位选择
类 21 转矩限位选择
5】 22 第 2 转矩限制
○——○
○ ○ ○ ○ 4-45
准
○○○○
○——○
○ — — ○ 4-46
备
○——○
○——○
○ ○ — ○ 4-47
○○—○
3
12 输出选择 SO3
13
SO4
14
SO5
功 能
14
频率
第 1 抑振
15
滤波器设定
16
频率
第 2 抑振
17
滤波器设定
18
频率
第 3 抑振
19
滤波器设定
20
频率
第 4 抑振
21
滤波器设定
22
平滑滤波器
位置指令
23
FIR 滤波器
00 速度设置内外切换
01
方向指定选择
02 速度指令 输入增益
03
输入反转
04
第1速
05
第2速
06
第3速
07
第4速
【 分
【分类 5】扩展设定 ................................................................................................. 4-42
【分类 6】特殊设定 ................................................................................................. 4-51
松下伺服参数调整
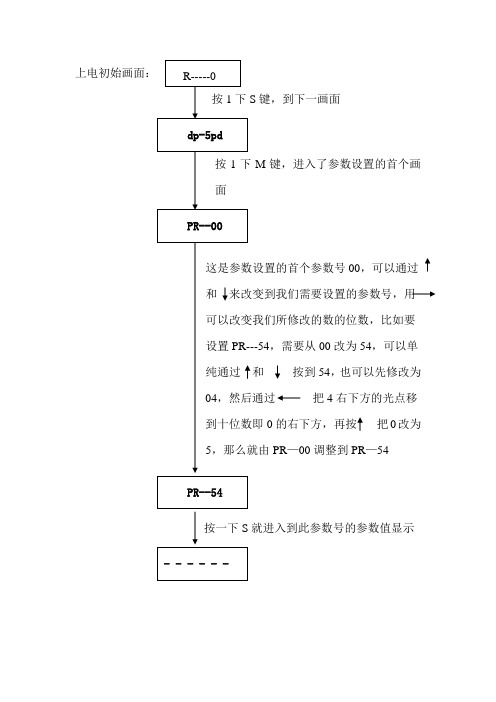
键,到下一画面
M键,进入了参数设置的首个画
00,可以通过来改变到我们需要设置的参数号,用
,需要从00改为54,可以单和按到54,也可以先修改为
把4右下方的光点移
0的右下方,再按把0改为
PR—00调整到PR—54
按一下S就进入到此参数号的参数值显示
修改参数值和修改参数号的
150,可以先将光点移到十位数的右下方,改
1 150
1下S,退到上一画,进入到下一画面
(约5秒)直到出现下一
(这表示参数保存完成)
S退到上一画面
M
,退回到初始画面
这样PR—54 的参数值就被我们设置完成,其它的参数值设置方法相同。
伺服控制器的速度值被保存在PR—54,PR—55,PR-56,PR—74,PR—75,PR—76,PR—77,几个参数中,由参数值的+和—符号来表示电机的转向,值表示速度的大小。
首先判断向上时伺服显示的速度的+ 或—,然后在设置向下的速度值时就可以先根据符号排除掉向上的几档速度,然后自动启动后,观察
伺服显示的慢速进给值(注意不要忘记值前面的正负号),在上述七个参数中寻找相同值即为要修改的参数号,比如通过观察慢速进给的速度为-800,那么我们在上述七个参数号中寻找参数值为-800的那一个(注意不要错看为800的参数值,这是正值,是代表相反方向的)假设为PR—56的参数值就是-800,那么PR—56也就是我们要修改的慢速进给值的参数号,然后修改即可,
切记不要搞错参数值的正负号,否则电机反向转动所有开关将不再起作用。
松下A4系列交流伺服调试资料

一、基本接线主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V;电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤1.JOG试机功能仅按基本接线就可试机;在数码显示为初始状态‘r0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;按住‘<’键直至显示‘SrV-on’;按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
常见问题解决方法:1.松下数字式交流伺服系统MHMA2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
请调整参数No.1 0、No.11、No.12,适当降低系统增益。
松下伺服驱动器参数设置与常见故障解决分析
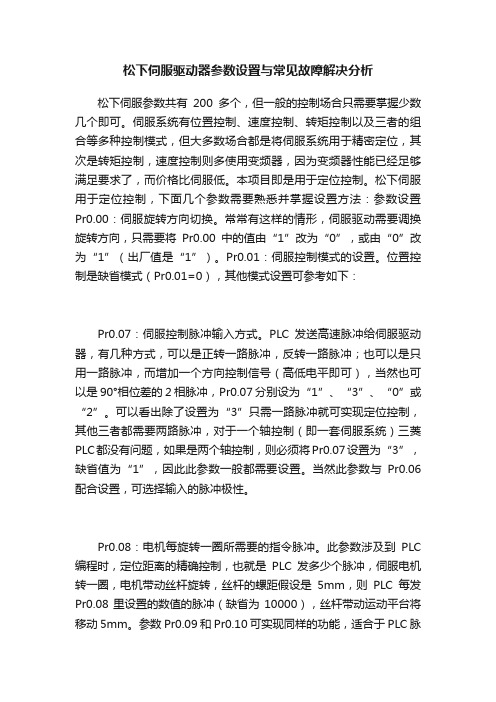
松下伺服驱动器参数设置与常见故障解决分析松下伺服参数共有200多个,但一般的控制场合只需要掌握少数几个即可。
伺服系统有位置控制、速度控制、转矩控制以及三者的组合等多种控制模式,但大多数场合都是将伺服系统用于精密定位,其次是转矩控制,速度控制则多使用变频器,因为变频器性能已经足够满足要求了,而价格比伺服低。
本项目即是用于定位控制。
松下伺服用于定位控制,下面几个参数需要熟悉并掌握设置方法:参数设置Pr0.00:伺服旋转方向切换。
常常有这样的情形,伺服驱动需要调换旋转方向,只需要将Pr0.00中的值由“1”改为“0”,或由“0”改为“1”(出厂值是“1”)。
Pr0.01:伺服控制模式的设置。
位置控制是缺省模式(Pr0.01=0),其他模式设置可参考如下:Pr0.07:伺服控制脉冲输入方式。
PLC发送高速脉冲给伺服驱动器,有几种方式,可以是正转一路脉冲,反转一路脉冲;也可以是只用一路脉冲,而增加一个方向控制信号(高低电平即可),当然也可以是90°相位差的2相脉冲,Pr0.07分别设为“1”、“3”、“0”或“2”。
可以看出除了设置为“3”只需一路脉冲就可实现定位控制,其他三者都需要两路脉冲,对于一个轴控制(即一套伺服系统)三菱PLC都没有问题,如果是两个轴控制,则必须将Pr0.07设置为“3”,缺省值为“1”,因此此参数一般都需要设置。
当然此参数与Pr0.06配合设置,可选择输入的脉冲极性。
Pr0.08:电机每旋转一圈所需要的指令脉冲。
此参数涉及到PLC 编程时,定位距离的精确控制,也就是PLC发多少个脉冲,伺服电机转一圈,电机带动丝杆旋转,丝杆的螺距假设是5mm,则PLC每发Pr0.08里设置的数值的脉冲(缺省为10000),丝杆带动运动平台将移动5mm。
参数Pr0.09和Pr0.10可实现同样的功能,适合于PLC脉冲数和移动距离不能整除的场合,其实掌握了Pr0.08,已经无往而不胜了。
Pr5.04:伺服定位,一般两端装有极限位的行程开关,如果装了,需要设置Pr5.04由“1”设置为“0”,否则行程开关将不起作用。
松下伺服电机的使用

松下伺服电机使用简例一、基本接线主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V;电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤1.JOG试机功能仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;按住‘<’键直至显示‘SrV-on’;按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
常见问题解决方法:1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
请调整参数No.10、No.11、No.12,适当降低系统增益。
松下A4调试
松下A4伺服+DMC-1842控制卡调试一、JOG试机功能驱动器上电前,请将驱动器的X5插头拔下;在数码显示为初始状态‘r0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF -AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG-’:按住‘^’键直至显示‘rEAdy’;按住‘<’键直至显示‘SrV-on’; 按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转。
按‘SET’键结束。
此法可证明电机、驱动器及其连接是正确无误的。
二、实时自动增益调整请将Pr21(实时自动增益调整模式)设为“1”;,请确保执行自动增益调整时负载位置的改变不会出现危险;选择显示“RE_no1“,按上或下箭头调整机械刚性设为“1”或较小值;按“SET”显示“REu-”指令输入禁止后,伺服接通;持续按上箭头,电机开始启动;调谐完成后,适当增加机械刚性设定值,重复上述步骤;最后按下面的步骤将增益值写入EEPROM中按“set”键后按2次“M”键,进入EEPROM写入模式;按”set”键,显示“EEP-“。
持续按上箭头,直至写入完成。
三、设置驱动器的控制模式请将Pr02(速度控制模式)设置为1;Pr04(驱动禁止输入无效)设置为1;Pr52(速度指令零漂)设置为0;对驱动器参数进行保存操作。
四、插入驱动器X5插头和100芯电缆线前准备工作请仔细检查控制卡的跳线,确保控制卡工作在速度模式;请将各轴的电机类型正确设置,TL(力矩限制),KP,KI,KD参数设置在较低的水平;OE(错误限制)设置为使能;电机使能输出关闭的状态;确认已写入修改参数到EEPROM中五、信号连线(插入X5插头,100芯电缆)启动电脑,观察运控端子板上LED状态指示灯;伺服使能信号指示灯熄灭状态;限位信号LED指示灯可以手动控制亮灭;驱动器电机上电,开启测试软件,手推工作台,观察光栅尺的读数,能够正负累加计数同时驱动器上速度显示方向与光栅尺读数改变方向一致;执行伺服使能命令,电机立即进入励磁状态,至此证明硬件连线正确。
松下伺服调试说明

Panasonic松下数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 松下连接示意图 2. 通电前的检查 3. 通电时的检查 4. 松下伺服驱动器的参数设定 5. 松下伺服驱动器的参数和性能优化调整 1. 松下连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在松下的保修范围!) 2. 通电前的检查 1) 确认松下伺服驱动器和电机插头的连接,相序是否正确: A.中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U F V I W B 接地 D 刹车电源 G 刹车电源 H C. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U D V E W F 接地 G 刹车电源 A 刹车电源 B 2)确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认松下伺服驱动器CN I/F和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.松下伺服驱动器的参数设定 1)松下伺服驱动器修改参数的操作方法 A. 接通驱动器电源; B. 按操作面板上的“SET”键; C. 按住“MODE”键,选择参数页面 PR _ 00 ; D. 用上○∧,下○∨按钮,选择你需要修改参数的参数号码 PR _ 42 (例修改42号参数); E. 按“SET”键,显示原来的参数值 00; F. 用左○<,上○∧,下○∨按钮,改变参数值; G. 修改完毕, 按“SET”键确定。
Panasonic MINAS A4 系
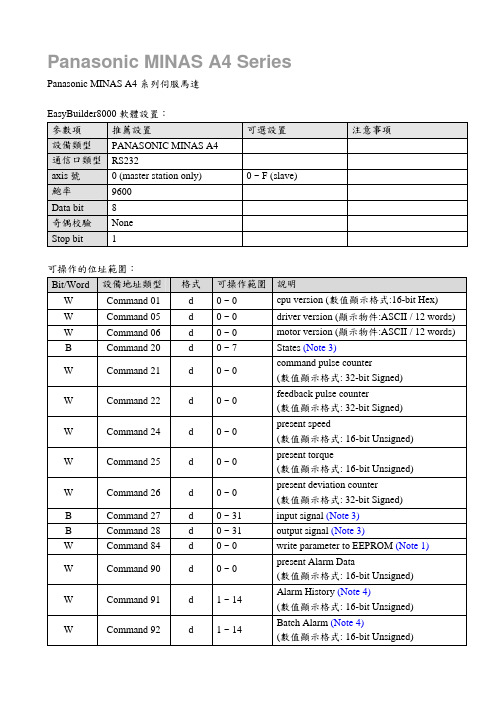
Panasonic MINAS A4 SeriesPanasonic MINAS A4系列伺服馬達EasyBuilder8000軟體設置:參數項推薦設置可選設置注意事項設備類型PANASONIC MINAS A4通信口類型RS232axis號0 (master station only) 0 ~ F (slave)鮑率9600Data bit 8奇偶校驗NoneStop bit 1可操作的位址範圍:Bit/Word 設備地址類型格式可操作範圍說明W Command 01 d 0 ~ 0 cpu version (數值顯示格式:16-bit Hex) W Command 05 d 0 ~ 0 driver version (顯示物件:ASCII / 12 words) W Command 06 d 0 ~ 0 motor version (顯示物件:ASCII / 12 words)B Command 20 d 0 ~ 7 States (Note 3)W Command 21 d 0 ~ 0 command pulse counter(數值顯示格式: 32-bit Signed)W Command 22 d 0 ~ 0 feedback pulse counter(數值顯示格式: 32-bit Signed)W Command 24 d 0 ~ 0 present speed(數值顯示格式:16-bit Unsigned)W Command 25 d 0 ~ 0 present torque(數值顯示格式:16-bit Unsigned)W Command 26 d 0 ~ 0 present deviation counter(數值顯示格式: 32-bit Signed)B Command 27 d 0 ~ 31 input signal (Note 3)B Command 28 d 0 ~ 31 output signal (Note 3)W Command 84 d 0 ~ 0 write parameter to EEPROM (Note 1)W Command 90 d 0 ~ 0 present Alarm Data(數值顯示格式:16-bit Unsigned)W Command 91 d 1 ~ 14 Alarm History (Note 4)(數值顯示格式:16-bit Unsigned)W Command 92 d 1 ~ 14 Batch Alarm (Note 4)(數值顯示格式:16-bit Unsigned)W Command 93 d 0 ~ 0 clear alarm history (include EEPROM) (Note 1)W Command 94 d 0 ~ 0 alarm clear (Note 1) W Command 9B d 0 ~ 0 Absolute clear (Note 1)WParameterhh0 ~ 7FIndividual Parameter (range: 0x00 ~ 0x7F) (Note 2)Note:1. Command 84、Command 93、Command 94、Command 9B 為唯寫(可使用位元狀態設定物件,觸發後即為執行寫入動作),其餘均為唯讀。
松下A4系列伺服系统的接口详解.
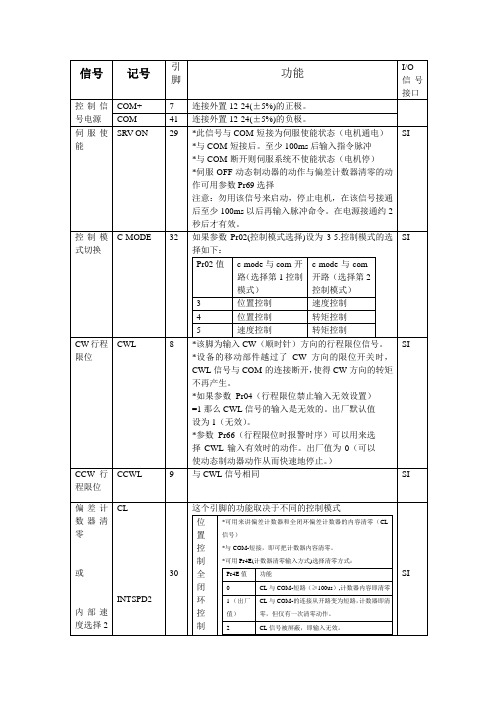
SI
报警清除
A-CLR
31
此信号与com-的连接保持闭合120ms以上,就可以将报警状态清理掉。报警清除的同时,偏差计数器的内容也会被清零.
SI
指令脉冲倍频选择
或
内部速度选择3
DIV
INTSPD3
28
该引脚的功能取决于不同的控制模式
SI
Pr03
Pr30
与com-
功能
0-2
0
开路
速度环:PI(比例/积分)动作
短路
速度环:P(比例)动作
1
并且当Pr31=2,且Pr36=2时,
开路
选择第1增益设置(Pr10-14)
短路
选择第2增益设置(Pr18-1C)
并且当Pr31和Pr36都不为2时
则无效,被屏蔽
3
--
用来输入转矩限制切换信号(TL_SEL)。
速度控制
*用来输入内部速度选择3信
号(INTSPD3).
转矩控制
输入无效
位置控制全闭环控制
*可以选择指令脉冲分倍屏设置的分
子如果与COM-短路,指令脉冲分倍
频的分子就从Pr48(指令脉冲分倍屏
第1分子)变为Pr49(第2分子)值
注意:请不要在切换动作的前后100ms内输入指令脉冲
以上为通用的输入信号及其功能
*伺服OFF动态制动器的动作与偏差计数器清零的动作可用参数Pr69选择
注意:勿用该信号来启动,停止电机,在该信号接通后至少100ms以后再输入脉冲命令。在电源接通约2秒后才有效。
SI
控制模式切换
C-MODE
32
如果参数Pr02(控制模式选择)设为3-5.控制模式的选择如下:
松下A4系列伺服增益调整

Pr.21=1~3
Pr.21=4~6
Pr.21=7
13
无需专业知识简单地对装置进行最佳增益调整
在实时自动调整前… 调整目的是? 装置的动作是? 快速到达目的地 (点到点的控制) 总是跟随指令 (轨迹控制)
内控文件
水平轴 Pr.21=1~3
垂直轴 Pr.21=4~6
Pr.21=7
14
5. 惯量的重要性
停止时 位置增益 动作时 位置增益 速度 环增益 速度积分 转矩滤波器 时间常数 时间常数
内控文件
速度 前馈
16个阶段的增益变更。 刚性大⇒增益大
18
6. 惯量推定
使用最小2乘法推定
内控文件
MINAS A4
转矩τ=加速度a×惯量J+摩擦Td
近似倾斜的直线
原来 只用推定数据的数值 来判断推定值 MINAS-A4 用加速和减速时两方面的数据 来判断推定值
输入脉冲单位 Pr.48 ×2 Pr.4A 编码器脉冲单位
Pr.4B 输入脉冲数/1转
2.Real time auto tuning …装置的惯量的推定。刚性调整。(详细后述) 3.与装置相配的Parameter变更 …为了适合装置的动作的控制。 (详细后述)
9
X轴 调整步骤 2 (Real time auto tuning) Pr.21 = 1 (X轴、Y轴) = 4 (Z轴) Z轴 Y轴
8
调整步骤 1.初期设定 …最初必要的工作。
内控文件
位置控制模式 Pr.02 = 0 脉冲数 Pr.48 = 10000(A:Pr46)、Pr.4A = 0、Pr.4B = 6400 输入脉冲形式 Pr.41 = 1、 Pr.42 = 3(输入脉冲设定) 脉冲平滑滤波器Pr.4D = 17(重新上电)
松下交流伺服说明书A4使用手册+中文

C~F 型:内置制动电阻(也可再外接制动电阻)。
内置
通过参数选择以下 7 种模式:①位置控制;②速度控制;③转矩控制;④位 置/速度控制;⑤位置/转矩控制;⑥速度/转矩控制;⑦全闭环控制
Minas A4 系列驱动器技术资料选编
控制输入
控制输出
最大指令脉冲频率
位 脉冲
置 输入
控
输入脉冲串形式 指令脉冲分倍频 (电子齿轮)
可设定范围:(1~10000)× 20~17 1~10000
对指令脉冲可选择初级延时滤波器或者 FIR 滤波器 可在 CCW、CW 两个方向分别设置转矩限制(3V/额定转矩)
可用 可用 可用 ⑤CW 方向行程禁止,⑥CCW 方向行程禁止,⑦内部速度选择 1, ⑧内部速度选择 2,⑨零速箝位 ⑥速度到达 可输入模拟量速度指令,其比例和方向用参数可调(默认值:6V/额定转速) 可在 CCW、CW 两个方向分别设置转矩限制(3V/额定转矩) 通过控制输入点可选 4 段内部速度 可分别设置 0~10s/1000rpm 的加速、减速时间;S 形加减速时间也可设置 可通过零速箝位输入使得内部速度保持为 0 可用 可用 ⑤CW 方向行程禁止,⑥CCW 方向行程禁止,⑦零速箝位 ⑥速度到达
4 点输出: 编码器信号(A/B/Z 相)或外部反馈装置信号(EXA/EXB/EXZ 相)输出差分 信号;Z 相或 EXZ 相也可以输出集电极开路信号。
主机 1:1 通讯 主机 1:n 通讯,n≤15
①5 个按键(
、 、 、 、 );②6 位 LED 显示
A、B 型驱动器:没有内置制动电阻(只可外接);
环境温度
主电源电缆
MADDCT1105 单相 100V 10A 5A
接地电缆
A4伺服驱动器参数列表
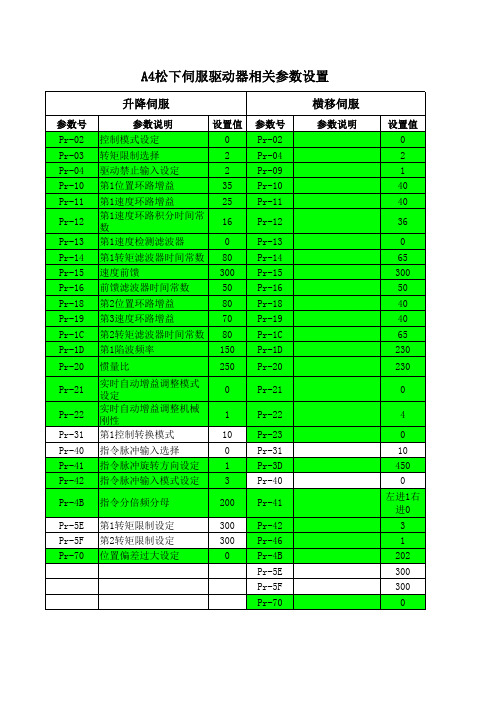
升降伺服
参数号 Pr-02 Pr-03 Pr-04 Pr-10 Pr-11
Pr-12
Pr-13 Pr-14 Pr-15 Pr-16 Pr-18 Pr-19 Pr-1C Pr-1D Pr-20
Pr-21
Pr-22
Pr-31 Pr-40 Pr-41 Pr-42
参数说明
设置值
编码器出错或干扰
24 1,P70参数过小;2.电机过载;3,加快加减速时间
38
极限
Pr-22
Pr-23 Pr-31 Pr-3D Pr-40
Pr-4B 指令分倍频分母
200 Pr-41
Pr-5E Pr-5F Pr-70
第1转矩限制设定 第2转矩限制设定 位置偏差过大设定
300 Pr-42
300 Pr-46
0
Pr-4B
Pr-5E
Pr-5F
Pr-70
横移伺服
参数说明
设置值 0 2 1 40 40
控制模式设定
0பைடு நூலகம்
转矩限制选择
2
驱动禁止输入设定
2
第1位置环路增益
35
第1速度环路增益
25
第1速度环路积分时间常 数
16
第1速度检测滤波器
0
第1转矩滤波器时间常数 80
速度前馈
300
前馈滤波器时间常数
50
第2位置环路增益
80
第3速度环路增益
70
第2转矩滤波器时间常数 80
第1陷波频率
150
惯量比
250
实时自动增益调整模式 设定
0
实时自动增益调整机械 刚性
1
第1控制转换模式
伺服电机使用手册

143.951
10.731
13.956
24.1
33.0
2.52
1.80
2.900 3.4
3.302 4.0
连续
3.820 11.460
0.646 0.646 3.42×10-4 1.692 11.054 0.09842 4.604 ×10-4 4.910 162.009 14.730 42.7 1.39 6.533
使用温度、湿度
温度:0~40℃;湿度:90%RH 以下(不结霜条件)
保存温度、湿度
温度:-20~60℃;湿度:90%RH 以下(不结霜条件)
备注:以上 750 瓦伺服电机的安装尺寸与松下 750 瓦伺服电机的安装尺寸相同
控制随心,运动所欲
5
功率
PN W
电机型号
小惯量伺服电机
500
750
1000
伺服电机使用手册 1200
安装方式
法兰安装
结构
全封闭,自冷式
海拔
1000m 以下
使用温度、湿度
温度:0~40℃;湿度:90%RH 以下(不结霜条件)
保存温度、湿度
温度:-20~60℃;湿度:90%RH 以下(不结霜条件)
备注:以上伺服电机的安装尺寸与松下伺服电机的安装尺寸相同
控制随心,运动所欲
4
功率
PN
电机型号
小惯量伺服电机
连续
2.387 7.161
0.556 0.556 0.438×10-4 3.297 9.56 0.06561 3.069×10-4 3.577 144.392 10.731 83.3 0.905
2.9 1.79
绝缘耐压
AC1500V,1 分钟
松下伺服调试说明.

Panasonic松下数字交流伺服安装调试说明书(2003.11版本目录1.松下连接示意图2.通电前的检查3.通电时的检查4.松下伺服驱动器的参数设定5.松下伺服驱动器的参数和性能优化调整1.松下连接示意图重要提示:由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种情况,不在松下的保修范围!2.通电前的检查1确认松下伺服驱动器和电机插头的连接,相序是否正确:A.中惯量电机,不带刹车制动器的连接:伺服驱动器电机插头U AVBWC接地D注:电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA0.75KW-2.5KW,带刹车制动器电机的连接:伺服驱动器电机插头U FVIWB接地D刹车电源G刹车电源HC.中惯量电机MDMA3KW-5KW,带刹车制动器电机的连接:伺服驱动器电机插头U DVEWF接地G刹车电源A刹车电源B2确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确,接插件螺丝拧紧。
3确认松下伺服驱动器CN I/F和数控系统的插头联接正确,接插件螺丝拧紧。
3.通电时的检查1确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2确认单相辅助电路输入电压在200V-220V范围内。
4.松下伺服驱动器的参数设定1松下伺服驱动器修改参数的操作方法A.接通驱动器电源;B.按操作面板上的“SET”键;C.按住“MODE”键,选择参数页面PR_00;D.用上○∧,下○∨按钮,选择你需要修改参数的参数号码PR_42(例修改42号参数;E.按“SET”键,显示原来的参数值00;F.用左○<,上○∧,下○∨按钮,改变参数值;G.修改完毕,按“SET”键确定。
重复以上D~G过程,修改其它参数。
修改参数操作完毕,切记选择驱动器EEPROM写入模式,保存参数。
H.按住“MODE”键,选择EEPROM写入模式页面EE_SEt;I.按“SET”键,显示EEP-;J.按住上“○∧”按钮(约3秒钟。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Panasonic
松下A4数字交流伺服安装调试说明书
(2005.11版本)
1
目录
1. 松下A4 连接示意图
2. 通电前的检查
3. 通电时的检查
4. 松下A4 伺服驱动器的参数设定
1)松下伺服驱动器修改参数的操作方法
2) 松下A4 伺服驱动器参数表
3)松下A4 伺服驱动器参数设定步骤5.常见故障报警的处理
重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安
装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种情况,不
在松下的保修范围!)
2. 通电前的检查
1) 确认松下伺服驱动器和电机插头的连接,相序是否正确:
A .中惯量电机,不带刹车制动器的连接: 3 U A 2 V
B 1 W C
接地 D
注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接:
U F
V I
W B
接地 D
刹车电源G
刹车电源H
C. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接:
U D
V E
W F
接地G
刹车电源 A
刹车电源 B
2)确认松下伺服驱动器X6 和松下伺服电机编码器联接正确。
3)确认松下伺服驱动器X5 和数控系统的插头联接正确。
3.通电时的检查
1) 确认三相主电路输入电压在200V-220V 范围内。
建议用户选用380V/200V 的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V 范围内。
4.松下A4 伺服驱动器的参数设定
1)松下伺服驱动器修改参数的操作方法
A. 接通驱动器电源;
B. 按操作面板上的“SET”键;
C. 按住“MODE”键,选择参数页面
D. ,下○∨按钮,选择你需要修改参数的参数号码
例修改42 号参数);
E. 按“SET”键,显示原来的参数值
F. 用左○<,上○∧,下○∨按钮,改变参数值;
G. 修改完毕, 按“SET”键确定。
重复以上D~G 过程,修改其它参数。
修改参数操作完毕,切记选择驱动器EEPROM 写入模式,保存参数。
H. 按住“MODE”键,选择EEPROM
I. 按“SET”键, 显示
J. 按住上 3
先显示后再显示
开始写入保存参数。
保存完毕,显示(有如下三种可能):
表示参数写入有效表示参数写入后,表示参数写入无效,
需关电源,再开电重新修改参数操作
源才能有效。
(詳细参见松下伺服驱动说明书)
提示:如果写入之前关掉电源,数据将丢失。
需重复进行以上步骤。
2) 松下A4 伺服驱动器参数表
松下伺服驱动器和凯恩帝数控系统相配时,只需设定以下参数(见参数表);其余参数,一般情况下,不用修改。
(3)松下A4 伺服驱动器参数设定步骤
第一步:驱动器正常上电后先按参数表(一)将参数输入到驱动器中,并保存到EEPROM 中。
第二步:移动机床各轴,如运行方向相反可通过改变系统中电机旋转方向参数的设定来改变机床的移动方向。
第三步:Pr22 号参数实时自动增益的机械刚性设定
(1)根据参数表中推荐的数值先设定一个最小的数值,按
“SET”键确定。
用数控系统手动方式先慢速后快速来回运
行该运动轴,如果伺服性能较稳,把Pr22 号参数增大一级,
按“SET”键确定,再往复移动。
可重复以上步骤,逐步增
大机械刚性设置值,一直到电机产生异常的响声或振荡为
止。
此时的数值减小一级后可作为Pr22 号参数的设定值。
设定完成后保存到EEPROM 中。
(2)以上步骤完成后驱动器根据机床的实际情况自动的设置完
驱动器的各增益数值。
此时需把Pr21 号参数实时自动增益
功能设为无效,设为0。
同时把Pr31 号参数第一控制切换模
式设为7,(在位置指令有变化时,即选择第二增益)。
设定完成后
保存到EEPROM 中。
(3)如果Pr22 号刚性参数设不上去,首先考虑机械上有无安装问题。
排除后还是设不上去,可通过驱动器陷波频率参
数来抑制振动。
陷波频率参数设定见下表(二):
松下 A4 数字交流伺服调试说明书
, 按
(4)以上参数设定好以后,如果电机在停止时,电机出现嗡嗡
的共振声,还可以把第一增益设小一些,来减小电机停止时的
振动声音。
见表(三)。
参数表(三)
注:表(三)中的参数需在 PR21 号参数设为 0 以后才可以设置。
松下A4 数字交流伺服调试说明书5. 常见故障报警的处理
唯雅诺自动化网:
松下A4 数字交流伺服调试说明书
其余更多、更详细的报警参见松下说明书。
11。