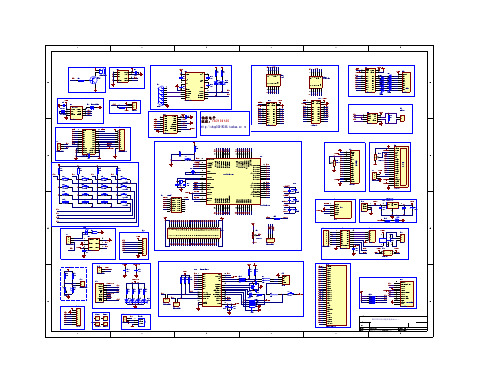
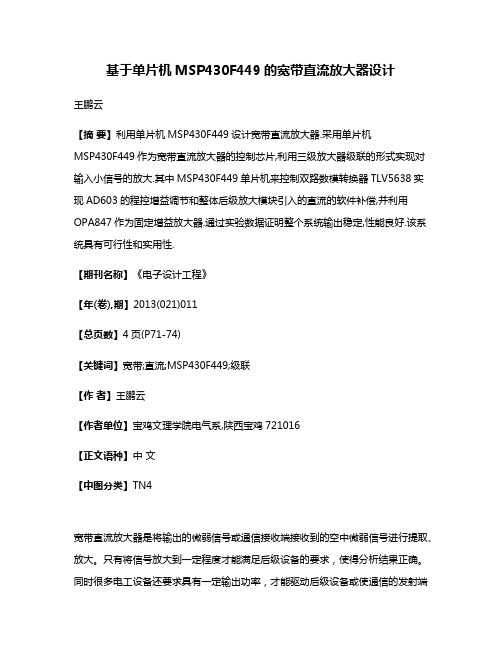
MSP430F449_V1.2开发板电路图
MSP430平台线路板模块说明及图示(训练套件包)
MSP430 平台线路板模块(训练套件包)说明及图示浙江求是科教设备有限公司2013年3月25日目录实训平台线路板模块 (1)1-1DCP-200-A MSP430F5438A核心板 (1)1-2DCP-202-A 数码管显示和键盘电路 (1)1-3DCP-203-A 点阵显示和键盘电路 (2)1-4DCP-204-A 液晶显示和键盘电路 (3)1-5DCP-205-A IC卡读写电路 (3)1-6DCP-206-A ADS7950 串口A/D转换电路 (4)1-7DCP-207-A 并口A/D转换电路 (4)1-8DCP-208-A ADS118串口A/D转换电路 (5)1-9DCP-209-A 串口D/A SPI转换电路 (5)1-10DCP-210-A 并口D/A转换电路 (6)1-11DCP-211-A 串口DA IIC转换电路 (6)1-12DCP-212-A V/F和F/V转换电路 (7)1-13DCP-213-A 可编程增益放大电路 (7)1-14DCP-214-A 信号滤波电路 (8)1-15DCP-215-A 开关量输入输出电路 (8)1-16DCP-216-A 功率运放输出电路 (9)1-17DCP-217-A 双路PWM输出电路 (9)1-18DCP-218-A H桥PWM输出电路 (10)1-19DCP-219-A 环境参数检测电路 (10)1-20DCP-220-A 仪用放大电路 (11)MSP430平台接线例图 (1)实训平台线路板模块1-1 DCP-200-A MSP430F5438A 核心板型号:DCP-200-A名称:MSP430F5438A 核心板 说明:此模块的核心芯片采用TI 公司的16位单片机MSP430F5438A ,256K FLASH 、16K RAM ,配置方式JTAG 全部引出,芯片时钟为25MHz 。
外围器件有:FLASH 芯片SST25VF016B 、串口通讯芯片MAX3232、USB 转串口芯片CH340T 。
基于MSP430F449单片机的数据通信与显示系统设计
基于MSP430F449单片机的数据通信与显示系统设计作者:李瑶王保帅来源:《物联网技术》2017年第01期摘要:MSP430单片机是TI公司于1996年推向市场的一款超低功耗16位微控制器,其最显著的特点是超低的功耗以及丰富的片上外设资源,方便高效的开发环境可应用于模拟信号的采集传感系统。
文中设计了一种基于MSP430F449型单片机的数据通信显示系统,通过PC 机和液晶显示屏实验验证了无线数据通信功能。
最后展望了MSP430系列单片机在电力系统中广阔的应用前景。
关键词:单片机;低功耗;无线传输;液晶显示中图分类号:TN926+.23;TP39 文献标识码:A 文章编号:2095-1302(2017)01-00-030 引言MSP430单片机是TI(Texas Instruments)公司于1996年推向市场的一款超低功耗16位MCU(Micro-Controller Unit),采用高效精简指令集系统,存储空间统一编址,其最显著的特点是超低的功耗以及丰富的片上外设资源。
本文设计并验证了一种基于MSP430F449型单片机最小系统的数据通信显示系统,采用ZigBee模块进行数据通信,采用12864LCD(Liquid Crystal Display)液晶显示接收到的数据,该设计系统可采用电池作为供电电源,具有功耗低、体积小等特点,可满足便携式需要。
最后展望了MSP430系列单片机广阔的应用前景。
1 硬件设计1.1 系统组成设计的通信显示系统可用于电气测量系统,通过传感器、信号放大滤波电路、AD转换电路,将有效电信息转换为数字信号后,通过ZigBee模块无线发送至本显示系统。
通信显示系统包括ZigBee无线串口发送接收模块、MSP430F449主控模块及12864点阵式液晶显示模块三部分。
电路可由电源接口供电,亦可采用两节电池供电,方便携带,由于MSP430F449芯片供电电压为3.3 V,因此需增加电源芯片进行电平转换。
MSP430开发板的原理图
VCC5 P7 1 2 3 4 5 6 7 8 9 10 HEADER10
QB QC QD QE QF QG QH GND 74HC595
VCC QA SER OE RCLK SRCLK SRCLR QH'
VCC 16 C26 15 104 14 P36 13 12 P33 11 P37 10 VCC 9
P20 1 2 3 4 5 VCC5 JDQ
5 3
R7 P60
P21 JDQ JDQ
2Байду номын сангаас
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51
1 2 3 4 5 6 7 8
P10 P12 P14 P16 P20 P22 P24 P26 P30 P32 P34 P36 P40 P42 P44 P46 P50 P52 P54 P56 P60 P62 P64 P66
C19 15 104 GND 14 T1OUT 7 T2OUT 13 R1IN 8 R2IN MAX3232
C20 104 P34 P35
e d dp c g N C
D11 LED
D10 LED
C1 a f C2 C3 b
LED1 SMG
e 12 d 11 dot 10 c 9 g 8 7
VCC 1 2 3 4 5 6 7 8 9
3 1
P12 RF
2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 50 52
B
D9
P2 GPIO
P19 1 2 3 4 5 6 7 HEADER 7 1 2 3 4 5 6 7 8
基于MSP430F449的高精度电子秤设计
基于MSP430F449的高精度电子秤设计【摘要】电子秤应用广泛,本文设计了一种以MSP430F449为信息处理核心的高精度电子秤,介绍了其系统框图,重点阐述了称重传感器的工作原理与电子秤称重数据采集电路的设计方法,并完成了电子秤的软件设计。
达到了国家标准《非自动秤通用检定规程JJG555—1996》规定的三级秤指标,称重误差小。
【关键词】电子秤;称重;称重数据采集;MSP430F4490 引言电子秤是配有称重装置的衡器,它经历了从模拟指针式向数字式发展的过程,称量精度由0.1%发展到0.01%甚至更高,一般具有各种参数的设定、去皮、累加、称重结果的自动处理与显示等功能[1]。
电子秤操作简单、称量准确、体积小、称量速度快、读数方便,广泛应用于商业贸易、医院、学校、企业等部门[2]。
本文以TI公司的高性能单片机MSP430F449为信息处理核心,结合24位A/D转换器,设计了一种高精度便携式电子秤,其最大量程为50kg,分度值为10g,内分度值为1g,达到了国家标准《非自动秤通用检定规程JJG555—1996》规定的三级秤指标[3]。
1 高精度电子秤的工作原理图1 高精度电子秤的工作原理框图高精度电子秤以MSP430F449为MCU,主要由称重信号采集电路、数字温度传感器、键盘、LCD、通信接口电路、语言提示电路、电源管理电路等组成,其原理如图1所示。
图中称重传感器、调理电路、A/D转换电路等组成称重信号采集电路,当被测载荷加载在秤体上时,安装在秤体下方的称重传感器产生与被测载荷成正比的电压信号,经调理电路放大、滤波、A/D转换后,传送至MCU,完成称重信号采集;同时MCU利用数字温度传感器采集的环境温度信号,根据温度补偿算法,完成被测载荷称重结果的温度补偿,获得最终的称重结果,并利用LCD显示。
系统利用键盘电路完成电子秤不同功能的选择和相关数据的输入;系统具有语音提示功能,可完成电子秤相关功能提示、报警等;电子秤具有RS232通信接口,可实现与上位机的通信功能等;系统具有正常工作和睡眠(即节电工作)等工作模式,利用电源管理电路,实现电子秤的低功耗设计。
基于 MSP430F449升降旗系统的设计

基于 MSP430F449升降旗系统的设计吴兴波;刘长升;荣志强【摘要】设计介绍了基于MSP430系列16位超低功耗单片机自动控制升降旗系统,通过单片机控制步进电机与语音芯片,达到国旗平稳升降,国歌同步播放的效果.并能实现无线遥控,断电保存原始工作状态,同步显示国旗高度,调节升降高度、速度等功能.【期刊名称】《吉林化工学院学报》【年(卷),期】2011(028)003【总页数】5页(P62-66)【关键词】MSP430;步进电机;升降旗;断电保存【作者】吴兴波;刘长升;荣志强【作者单位】吉林化工学院,信息与控制工程学院,吉林,吉林,132022;吉林化工学院;吉林化工学院【正文语种】中文【中图分类】TP23升降旗系统应用广泛、频繁.在政府部门,学校,企业,广场等场所都会看到国旗的飘扬.随着信息时代的飞速发展,科学技术越来越发达,特别是自动化控制和单片机测控技术的发展,可以应用自动控制系统来完成国旗的升降控制,使国旗升降速度平稳,并与国歌演奏时间准确配合,从而避免了在公共场合出现人为升降旗与国歌演奏不一致的尴尬场面.保证了升旗仪式的庄重性.系统采用超低功耗单片机MSP430F449作为控制核心,降低了系统功耗,并且利用其丰富的I/O端口,实现了更多人性化服务.为了提高升旗精度,系统采用步进电机带动升降旗拉线,通过记录步进电机所走过的步数精确定位国旗的位置,达到设计要求.系统框图如图1所示,MSP430F449单片机是其核心控制芯片,通过按键或无线遥控控制国旗的升降,国歌的演奏,以及改变预置国旗高度或改变升降时间等.无线遥控模块采用315 MHz的PT2262及非锁存 PT2272(M4).单片机驱动LCM128645ZK显示模块,实时显示升降旗模式及国旗位置.当单片机检测到断电时停止升降旗工作,同时将升旗模式及国旗所在位置等信息记入外部E2PROM中.当再次接通电源时,会通过按键(KEY)触发单片机读取E2PROM中的内容并返回原始状态继续工作.2.1 直流稳压电源设计直流稳压电源是让输入交流电先后通过变压器,整流网络,滤波网络,稳压网络完成交直流转换,电路如图2所示.12 V电源给步进电机及其驱动芯片供电;为完成断电保存功能,4.3 V电源经储能电容后给E2PROM及单片机供电;3.6 V电源给单片机其他外围电路供电.2.2 按键及遥控开关电路设计2.2.1 模式开关及断电恢复按键设计单片机供电系统如图3所示,电流通过二极管,给系统单片机供电.同时,电解电容充电储能.当系统遇到断电等突发事件时,单片机与E2PROM由电容储能供电,短时间内正常工作.当单片机检测到系统断电时,停止当前工作,同时将系统工作状态,国旗高度,国旗升降时间等信息迅速记入E2PROM中.重新上电后,按“KEY”键,系统自动恢复断电前的升降旗模式及国旗高度,并继续运行.模式选择开关由BCD拨码开关构成,如图32.2.2 操作按键设计系统设置了4个操作按键 K00、K01、K02、K03,如图4所示.4个操作按键对应其4个遥控按键 K10、K11、K12、K13 如图 6 所示.K00(K10)为上升键,K01(K11)为下降键.在高度模式下,K02(K12)为预设高度增加键,K03(K13)为预设高度减小键在;在时间模式下,K02(K12)为预设时间增加键,K03(K13)为预设时间减小键.在国旗上升或下降状态中,重复按键或者误按其他键(除单片机复位键外),系统不作任何反应.避免了误操作.所示.系统设计了升旗模式、升旗(半)模式(LED灯提示)、高度模式、时间模式及手动升降模式.其模式分别对应拨码开关中的0~4(5~9),拨动拨码开关可循环选择升降旗模式.2.3 电机驱动电路设计为达到国旗高度精度<±2 cm要求,采用可精确定位的步进电机作为国旗的动力输出.如图5所示,系统采用1102H419-150A二相混合式步进电机.工作电压为DC12 V.其驱动电路采用双H桥驱动芯片L293D.单片机计算步进电机驱动脉冲数,经PIO端口控制步进电机的速度和定位.在单片机与驱动芯片之间,采用了光电隔离技术,能有效地防止步进电机对单片机的干扰[1].2.4 E2PROM硬件电路设计本系统中E2PROM采用CATALYST公司的CAT24WC01芯片.CAT24WC01是一个1K位串行CMOS型低功耗 E2PROM.该器件通过I2C总线进行写入与读取[2].接线方式如图6所示.2.5 国歌播放电路的设计WTV020-SD模块是一款可重复擦写语音内容的语音模块,该模块中WTV020SD-20S语音芯片为主控核心,具有按键一对一控制模式.支持6K~22K采样频率的语音加载,语音清晰.如图7所示,国歌播放电路中,语音芯片为按键一对一模式(3段语音),拉低I/O口P02、P03、P07分别对应3段语音.P04、P05为音量控制键.具体功能如表1所示.本系统程序采用MSP430系列单片机专用C语言C430编制[3],单片机读入模式选择信息及工作状态选择信息,控制电机及语音芯片等工作.断电时,单片机将通过I2C总线协议,将系统工作状态等信息存入片外E2PROM中.具体程序框图如图8所示.系统通过采用MSP430F449单片机实现了升旗模式、升旗(半)模式(LED灯提示)、高度模式、时间模式及手动升降模式等功能.并能实现无线遥控与断电保存.经原理样机验证,国歌播放与国旗上升时间准确配合,国旗升降平稳.国旗上升高度误差在±0.5 cm,国旗升降时间误差在±0.2 s.达到了自动控制升降旗的目的.Key words:MSP430;stepper motor;rising and falling flag;preservation during power failure【相关文献】[1]张毅刚,彭喜元,董继成.单片机原理及应用[M].北京:高等教育出版社,2003:367-369. [2]沈建华,杨艳琴,翟骁曙.MSP430系列16位超低功耗单片机原理及应用[M].北京:清华大学出版社,2004:242-258.[3]胡大可.MSP430系列单片机C语言程序设计与开发[M].北京:北京航空航天出版社,2001. Abstract:The automatic flag raising/lowering system was designed based on 16-bit ultra low-power MCU of MSP430 series.Its stepper motor and audio chip are controlled by MCUs so that national flag can be raised and lowered steadily and the national anthem can be broadcast synchronously.The system can realize the wireless remote control and preservation during power failure.The altitude of national flag can be synchronously displayed and the flag raising/lowering speed is adjustable.。
基于MSP430F449的电子血压计设计(附原理图)
随着生活水平的不断提高以及城市老龄化比例的提高,医疗电子设备的家庭化逐渐成为了趋势。
其中家用电子血压计就是典型的家庭医疗检测设备之一。
目前血压计大致上可分为两种:一是水银式血压计,其优点为数值稳定,其缺点为无法一个人自行操作,必须专业医护人员操作,且肉眼观察误差极大,主观性强,体积较大不易携带。
二是电子式血压计,其优点为:使用简易,可一人独自操作;测量值便于记录,体积轻巧便于携带。
电子式血压计具备了诸多优点,越来越受到普通家庭的欢迎。
本文介绍了以MSP430F449为控制核心,辅以BP01型压力传感器与MCU之间模拟信号处理电路以及LCD显示、语音提示,实现家用电子血压计的设计。
血压测量原理血压的概念就是血液流经血管壁时的压力。
由心脏出来的血液,需要有推力,才能绕行身体一周,心脏就是借着不停的收缩、放松,将血液推送前进。
血压有两种,一是收缩压:是当心脏收缩将血液打到血管所测得的血压,另一是舒张压:是心脏在不收缩所测得的压力。
当袖带的压力等于血压时,血液开始可以流通而产生所谓的袖带声,这时候表现为收缩压,从这一刻开始做记录,直到最后袖带声音消失的时候,记录此点即为舒张压。
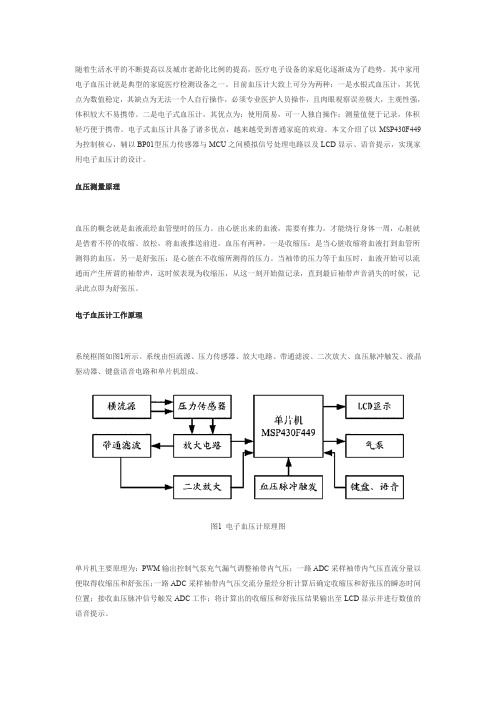
电子血压计工作原理系统框图如图1所示。
系统由恒流源、压力传感器、放大电路、带通滤波、二次放大、血压脉冲触发、液晶驱动器、键盘语音电路和单片机组成。
图1电子血压计原理图单片机主要原理为:PWM输出控制气泵充气漏气调整袖带内气压;一路ADC采样袖带内气压直流分量以便取得收缩压和舒张压;一路ADC采样袖带内气压交流分量经分析计算后确定收缩压和舒张压的瞬态时间位置;接收血压脉冲信号触发ADC工作;将计算出的收缩压和舒张压结果输出至LCD显示并进行数值的语音提示。
硬件设计1MSP430FF449D单片机主控电路本系统主控电路如图2所示,主要由MSP430F449芯片、JTAG接口电路、时钟发生电路、时钟输出电路、复位电路、PWM波输出电路、供电电路等组成。
MSP430电路图集锦
MSP430电路图集锦:创新设计思维2014年11月12日10:11 来源:电子发烧友网整合作者:Dick 我要评论(0)标签:TI(566)MSP430(499)MSP430系列单片机是美国德州仪器开始推向市场的一种16位超低功耗、具有精简指令集的混合信号处理器。
称之为混合信号处理器,是由于其针对实际应用需求,将多个不同功能的模拟电路、数字电路模块和微处理器集成在一个芯片上,以提供“单片机”解决方案。
该系列单片机多应用于需要电池供电的便携式仪器仪表中。
下面一起来看看基于MSP430的设计电路图集锦。
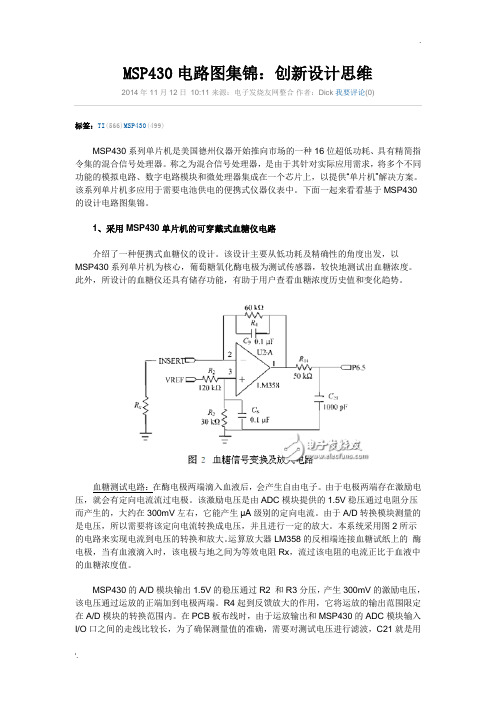
1、采用MSP430单片机的可穿戴式血糖仪电路介绍了一种便携式血糖仪的设计。
该设计主要从低功耗及精确性的角度出发,以MSP430系列单片机为核心,葡萄糖氧化酶电极为测试传感器,较快地测试出血糖浓度。
此外,所设计的血糖仪还具有储存功能,有助于用户查看血糖浓度历史值和变化趋势。
血糖测试电路:在酶电极两端滴入血液后,会产生自由电子。
由于电极两端存在激励电压,就会有定向电流流过电极。
该激励电压是由ADC模块提供的1.5V稳压通过电阻分压而产生的,大约在300mV左右,它能产生μA级别的定向电流。
由于A/D转换模块测量的是电压,所以需要将该定向电流转换成电压,并且进行一定的放大。
本系统采用图2所示的电路来实现电流到电压的转换和放大。
运算放大器LM358的反相端连接血糖试纸上的酶电极,当有血液滴入时,该电极与地之间为等效电阻Rx,流过该电阻的电流正比于血液中的血糖浓度值。
MSP430的A/D模块输出1.5V的稳压通过R2 和R3分压,产生300mV的激励电压,该电压通过运放的正端加到电极两端。
R4起到反馈放大的作用,它将运放的输出范围限定在A/D模块的转换范围内。
在PCB板布线时,由于运放输出和MSP430的ADC模块输入I/O口之间的走线比较长,为了确保测量值的准确,需要对测试电压进行滤波,C21就是用来起滤波作用的,以减少走线过长所引入的外来干扰对血糖测试的影响。
基于MSP430F449单片机的24BYJ48步进电机控制

引言步进电机可快速启动、停止和反转,加上步进电机只有周期性的误差而无累积误差,其运行不受负载变化的影响等特点,使得在速度、位置等控制领域用步进电机来控制变得简单,因而步进电机使用非常广泛。
由于利用单片机实现的步进电机具有控制成本低、使用灵活等特点,所以越来越多地引起人们的重视。
本文介绍基于MSP430系列单片机实现的24BYJ48步进电机控制。
1步进电机1.1工作原理步进电机是一种将电脉冲转化为角位移的执行机构。
角位移与脉冲数成正比,转速与脉冲频率成正比,因此可通过改变脉冲频率实现步进电机调速。
步进电机有许多种形状和尺寸,但不论形状和尺寸如何,按照电磁转矩的产生原理可分为磁阻式(反应式BF )步进电机、永磁式步进电机BY 和感应子式(混合式)BYG 步进电机。
根据励磁绕组的相数分主要有单相、三相、四相和五相等多种[1]。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),步距角的大小反映了步进电机分辨率的大小,它与步进电机的结构和工作方式有关,可以由下式求得:Q S =360°r式中:N 为励磁绕组通电一周的状态改变次数,即为运行拍数,Z r 为步进电机转子齿数。
以三相步进电机为例,假设步进电机转子的齿数为40,以单三拍方式工作,通电顺序为A →B →C →A ,通电一周的状态改变次数为3(即3拍),则步距角为3度。
若以三相六拍方式工作,通电顺序为A →AB →B →BC →C →CA →A ,通电一周的状态改变次数为6,则步距角为1.5度,分辨率提高一倍。
三相三拍运行方式时,当通电顺序为A →B →C →A ,步进电机将不断地按顺时针方向转动,叫正转,那么当通电顺序按A →C →B →A 进行时,则电机反时针旋转,叫反转。
可见控制步进电机正反转只是三相绕组通电顺序不同而已。
同理,三相六拍运行方式时,正转通电顺序为A →AB →B →BC →C →CA →A ,反转通电顺序为A →AC →C →CB →B →BA →A 。
MSP430F149开发板电路原理图

U9 DAC0832
CS W R1 AGND D3 D2 D1 D0 Vref Rfb DGND
VCC IL E W R2 XFE R D4 D5 D6 D7 Iout2 Iout1
20
VCC
19
18 DAC_W R
17 DAC_CS
16 DAC_D4
15 DAC_D5
14 DAC_D6
13 DAC_D7
JP9 HE ADER 8X2
P1 .0
P1 0
P1 .1
1
2
P1 1
P1 .2
3
4
P1 2
P1 .3
5
6
P1 3
P1 .4
7
8
P1 4
P1 .5
9
10
P1 5
P1 .6
11
12
P1 6
P1 .7
13
14
P1 7
15
16
X2
C1
30p f
Y1
11. 0592M
C2
30p f
X1
J4
20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
4 5 6 15 16 17
D/I R/W E CS1 CS2 RST
LC M_D 0 LC M_D 1 LC M_D 2 LC M_D 3 LC M_D 4 LC M_D 5 LC M_D 6 LC M_D 7
7 8 9 10 11 12 13 14
D0 D1 D2 D3 D4 D5 D6 D7
LC D1286 4
LED LED LED LED LED LED LED LED
基于MSP430F449的数据存储和USB串行通信实现
基于MSP430F449的数据存储和USB串行通信实现时间:2007-06-14 13:07:00 来源:21IC中国电子网作者:中科院上海技术物理研究所王海英摘要:在数据采集设备以及具有相关功能的仪器设计中,数据的存储和传输是一个非常重要的环节,本文在成功实践的基础上,介绍微控制器MSP430F449实现数据的采集后的数据存储及与上位机数据通信的相关内容。
文中给出了实用的硬件电路和部分软件代码,详细讲解了在数据存储中需要注意的一些环节。
关键词:MSP430,USB,I2C在数据采集和测量仪器尤其是便携式设备中,数据存储和传输是不可避免的问题,近年来TI公司推出的低功耗微控制器MSP430,在仪器设计和制造领域引起巨大变革,新型控制器和大容量串行存储器的应用大大提高产品了的性能。
本文主要解决两个问题1 解决经过MSP430采集后的数据与EEPROM24C256的数据接口问题,也就是数据存储问题;2 解决EEPROM与上位机(普通微机)的数据通信问题,也就是存储后的数据上传问题。
首先对主要的集成电路做简单介绍MSP430F449简介MSP430F449是MSP430系列中的一种,MSP430系列是一种具有集成度高,功能丰富、功耗低等特点的16位单片机。
它的集成调试环境Embedded Workbench 提供了良好的C语言开发平台。
设计中基于程序的复杂性和程序容量大的要求选择了MSP430F449,这款芯片具有64K程序存储器,可以满足大部分复杂控制的需要;它的封装100-PIN QFP具有良好的互换性,与MSP430F437 、MSP430F435等芯片具有完全一致的管脚可以在程序量上进行合理选择。
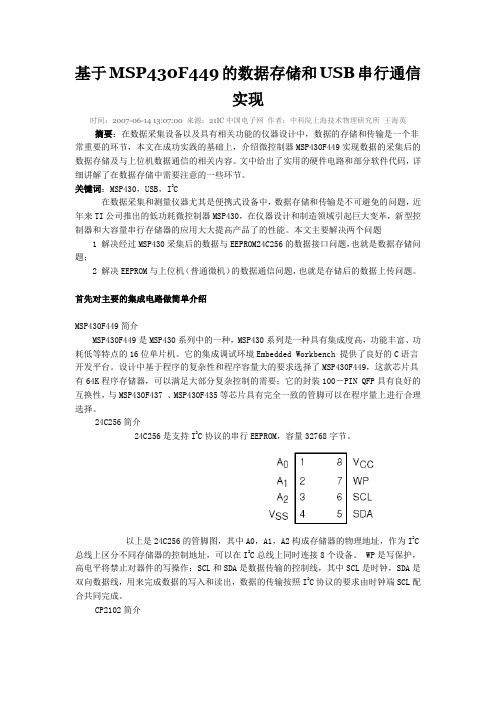
24C256简介24C256是支持I2C协议的串行EEPROM,容量32768字节。
以上是24C256的管脚图,其中A0,A1,A2构成存储器的物理地址,作为I2C总线上区分不同存储器的控制地址,可以在I2C总线上同时连接8个设备。
毕业设计:多亮度等级调光灯制作(终稿)-精品
毕业论文毕业设计论文设计(论文)题目:多亮度等级调光灯制作下达日期:2008 年11 月日开始日期:2008 年11 月日完成日期:2009 年01 月日指导教师:学生专业:班级:学生姓名:教研室主任:信息工程系本系统基于单片机MSP430F449为控制核心。
通过控制可控硅的导通角控制灯的明亮程度。
系统的硬件部分主要包括键盘、MSP430F449单片机、延时计数器、光电耦合电路、主控制电路,同步和过零检测电路。
控制信号为简单的键盘输入,当不同的按键按下,可以直观的看到灯的多种亮度。
主控制电路为非门、光电耦合器和双向可控硅及电阻电容共同组成,在这里与双向可控硅并联的电阻和电容起对可控硅的保护作用。
同步信号是通过变压器变压并经过光电耦合电路取得。
软件是由C语言编写,编译链接后下载到MSP430F449中运行。
软件能够实现本设计的功能要求,程序通过键盘信号采集、时序生成和对延时计数器赋值来产生符合要求的控制信号。
本设计结构简单,易于实现,性能稳定实用。
关键词:MSP430F449微控制器,单片机,可控硅AbstractThe MSP430F449 MCU-based system for the control of the core uses SCR to control the on-angle control of the bright lights degree。
The hardware,includes some of the major keyboard,MSP430F449 microcontroller,Phase delay circuit,photoelectric coupled circuit,the main control circuit,synchronization and zero detection circuit。
Control signal for the simple keyboard input,when a different button press,you can see the lights of the visual variety of brightness.Keywords:MSP430F449 Microcontroller,Single-Chip Microcomputer,SCR摘要 (1)目录 (2)第一章绪论 (5)1.1单片机介绍 (5)1.2单片机的分类 (5)1.3单片机的发展趋势 (6)1.4单片机的组成及特点 (7)1.4.1单片机的组成 (8)1.4.2单片机的特点 (8)1.5单片机的发展 (9)1.5.1单片机发展的三大阶段 (9)1.5.2单片机发展简史 (9)1.6单片机的应用 (10)第2章设计方案论述 (11)2.1可控硅介绍 (11)2.1.1可控硅的分类 (11)2.1.2可控硅的主要参数 (11)2.1.3常用封装形式 (12)2.1.4主要生产厂家 (12)2.2可控硅的结构和特性 (12)2.3 调光灯设计的功能要求和工作原理 (13)2.4可控硅作用、特点 (13)2.4.2单向可控硅基本结构 (13)2.4.3双向可控硅 (14)2.5可控硅的导通原理 (14)2.6方案论证与比较 (15)2.6本章小结 (16)第3章 MSP430芯片介绍 (16)3.1 MSP430芯片简介 (16)3.2 MSP430 单片机的发展 (17)3.3 MSP430 单片机的特点 (18)3.4 MSP430 系列与89C51系列的比较 (19)3.5 MSP430 产品系列类型描述 (20)3.6本章小结 (21)第4章多亮度等级调光灯的设计 (21)4.1设计原理 (21)4.2功能简介 (21)4.3 硬件部分 (21)4.3.1硬件结构图 (22)4.3.2电路说明 (22)4.3.4硬件流程图: (22)4.4控制器的选择思路 (23)4.5可控硅主驱动电路 (24)4.6控制电路 (24)4.7 人机交互-键盘接口 (25)第5章软件设计 (26)5.1软件开发环境介绍 (26)5.1.2 嵌入式IAR Embedded Workbench IDE (26)5.1.2 一个可扩展的模块化的环境 (26)5.1.3 特性 (26)5.1.4 项目管理 (27)5.1.5 源代码控制 (27)5.1.6窗口管理 (27)5.1.7 文本编辑器 (27)5.2 软件设计 (28)5.2.1 软件组成 (28)5.2.1 程序流程图如下 (28)5.3 软件实现 (29)5.4测试的方法与仪器 (29)5.5测试数据及测试结果分析 (29)5.6 本章小结 (30)课题背景 (30)参考文献 (31)附录 (32)Ⅰ. 硬件结构图 (32)Ⅱ.元器件清单 (32)致谢 (33)毕业设计总结 (34)第一章绪论1.1单片机介绍单片机(Single-Chip Microcomputer),又称单片微控制器,它不是完成某一个逻辑功能的芯片,而是把一个计算机系统集成到一个芯片上。
msp430f449简介行业知识

向阳课件
关闭局部中断一般是给想关的特殊功能寄存器相关位置0
同样以P1口外部中断为例:
关闭局部中断:
P1IE&=~BIT0;//关闭P1.0外部中断
2、打开、关闭全局中断:
_EINT();//打开总中断,相当于51的EA=1;
_DINT();//关闭总中断,相当于51的EA=0;
3、各中断向量Interrupt Vectors:
4、SMCLK:子系统时钟,可有软件选择来自XT2CLK或DCOCLK 的时钟。(主要用于高速外设)
7
向阳课件
四、MCLK应用举例:
1、在默认情况下,MCLK来自于DCOCLK其频率为1.048576MHZ 其计算方法:MCLK=(31+1)*32768 2、如何选择ACLK作为MCLK: void clk_initial() { do
1、外部中断:P1、P2
2、定时器中断。 3、看门狗定时器中断。 4、串口中断。 5、A/D 转换中断。 6、比较器中断。
二、中断的 一般设置:
1、打开、关闭局部中断: 打开局部中断一般是给想关的特殊功能寄存器相关位置1
以P1口外部中断为例: 打开局部中断: P1IE|=BIT0;//打开P1.0外部中断
4
向阳课件
三、基本操作:
1、所有P口都可作为通用IO口使用 2、所有P口都可进行字节操作和位操作
按字节操作: 例 P1DIR=0xff; //将P1口作为输出口 PIOUT=0x20; // P1口输出0x20 P1DIR=0x00; //将P1口作为输入口 data=P1IN //读取P1口外部输入值 按位操作: 例 P1DIR=BIT0; //将P1.0作为输出口 P1OUT|=BIT0; //P1.0输出1 P1OUT&=~BIT0; //P1.0输出0 P1DIR&=~BIT0; //将P1.0口作为输入 data=P1IN&BIT0; //读取P1.0口外部输入值
msp430单片机控制步进电机实验的电路图及C程序

各模块的电路图如下:试验程序如下:#include <msp430x14x.h>#define DCO_FREQ 1000000 // DCO frequency#define ONE_SEC_CNT 512 // Number of WDT interrupts in 1 second#define DEBOUNCE_CNT 0x05 // (1/512)*5 = ~10 msec debounce#define DIR_MASK 0x01 // 0x01 is clockwise, 0x00 is counter-clockwise #define STEP_MASK 0x02 // 0x00 is full-stepping, 0x02 is half-stepping #define MOTION_MASK 0x04 // 0x00 is continuous, 0x04 is single-step#define DEFAULT_RA TE 0x8000 // Default stepping rate#define MIN_RATE 0x8000 // Minimum stepping rate#define MAX_RATE 0x0800 // Maximum stepping rate// Default state is full-stepping, clockwise, continuousunsigned char state = 1; // State variableunsigned char stepIndex = 0; // State table indexunsigned int rate = DEFAULT_RA TE; // Stepping rateunsigned char change_rate_flag = 0; // Flag indicating rate changeunsigned int max_rate = MAX_RA TE; // Maximum stepping rateunsigned int min_rate = MIN_RA TE; // Minimum stepping rate unsigned int SW[4];void sys_init(void);void Set_DCO(unsigned long freq);void timerA_Init(void);void uart0_Init(void);void wdt_Init(void);void toggle_stepping_mode(void);void increase_stepping_rate(void);void decrease_stepping_rate(void);void toggle_motion(void);void toggle_direction(void);//定义串口操作变量char nRev_UART0; // 串口0 的接收标志char UART0_TX_BUF[10]; // 串口0 的发送缓冲区char UART1_RX_Temp[10];char UART0_RX_BUF[10]; // 串口0 的接收缓冲区int nTX0_Len;int nRX0_Len;int nRX0_Len_temp;char nTX0_Flag;int nSend_TX0;// 整步状态表Astatic const unsigned char fullStepA[] ={0x00,0x00,0x01,0x01};// 半步状态表Bstatic const unsigned char fullStepB[] ={0x01,0x00,0x00,0x01};// 半步状态表Astatic const unsigned char HalfStepA[] = {0x01, // 001 10x06, // 110 20x00, // 000 30x00, // 000 40x00, // 000 50x07, // 111 60x01, // 001 70x01 // 001 8};// 逆时钟、半步状态表Bstatic const unsigned char CcwHalfStepB[] = {0x01, // 001 10x01, // 001 20x01, // 001 30x06, // 110 40x00, // 000 50x00, // 000 60x00, // 000 70x07 // 111 8};// 顺时钟、半步状态表Bstatic const unsigned char CwHalfStepB[] = {0x00, // 000 10x00, // 000 20x00, // 000 30x07, // 111 40x01, // 001 50x01, // 001 60x01, // 001 70x06 // 110 8};void main(void){int i;// 停止WDTWDTCTL = WDTPW + WDTHOLD;sys_init();_EINT();for(;;){if(nRev_UART0 == 1){nRev_UART0 = 0;for(i = 0;i < nRX0_Len;i++) UART1_RX_Temp[i] = UART0_RX_BUF[i];if((UART1_RX_Temp[0] == 'A') && (UART1_RX_Temp[1] == 'T')){UART0_TX_BUF[0] = 'O';UART0_TX_BUF[1] = 'K';UART0_TX_BUF[2] = 13;nTX0_Len = 3;switch(UART1_RX_Temp[2]){case 'D': // 方向toggle_direction();break;case 'C': // 运动模式toggle_motion();break;case 'M': // 步进模式toggle_stepping_mode();break;case 'F': // 增加速率increase_stepping_rate();break;case 'S': // 降低速率decrease_stepping_rate();break;default: break;}}else{UART0_TX_BUF[0] = 'E';UART0_TX_BUF[1] = 'R';UART0_TX_BUF[2] = 'O';UART0_TX_BUF[3] = 'R';UART0_TX_BUF[4] = 'R';UART0_TX_BUF[5] = 13;nTX0_Len = 6;}// 设置中断标志,进入发送中断程序IFG1 |= UTXIFG0;nRX0_Len = 0;}}}void sys_init(void){// 设置下降沿触发中断P1IES = 0x0f;P1IFG = 0x00;P1IE = 0x0f;// 设置P2.3,2,1,0 为输出// 设置P3.3,2,1,0 为输出P2OUT = 0x00;P3OUT = 0x00;P2DIR |= 0x0f;P3DIR |= 0x0f;// 设置DCOSet_DCO(DCO_FREQ);// 初始化Timer AtimerA_Init();// 初始化UART0uart0_Init();// 初始化WDTwdt_Init();}void Set_DCO(unsigned long freq){unsigned int clkCnt;unsigned int numDcoClks;unsigned int prevCnt = 0;// ACLK = LFXT1CLK/8 = 4096 HzBCSCTL1 |= DIV A_3;numDcoClks = freq/4096;TACCTL2 = CM_1 + CCIS_1 + CAP; TACTL = TASSEL_2 + MC_2 + TACLR; while(1){while( !(TACCTL2 & CCIFG) ){}TACCTL2 &= ~CCIFG;clkCnt = TACCR2 - prevCnt;prevCnt = TACCR2;if( numDcoClks == clkCnt ){break;}else if( clkCnt > numDcoClks ){DCOCTL--;if( DCOCTL == 0xFF ){if( BCSCTL1 & 0x07 ){BCSCTL1--;}else{break;}}}else{DCOCTL++;if( DCOCTL == 0x00 ){if( (BCSCTL1 & 0x07) != 0x07 ){BCSCTL1++;}else{break;}}}}// ACLK = LFXT1CLK/1 = 32768 HzBCSCTL1 &= ~DIV A_3;TACCTL2 = 0;TACTL = 0;}void wdt_Init(void){// 设置时钟源为ACLK,1秒内产生512此WDTCTL = WDTPW + WDTTMSEL + WDTCNTCL + WDTSSEL + WDTIS0 + WDTIS1; }void uart0_Init(void){//将寄存器的内容清零U0CTL = 0X00;//数据位为8bitU0CTL += CHAR;U0TCTL = 0X00;//波特率发生器选择ACLKU0TCTL += SSEL0;//波特率为9600UBR0_0 = 0X03;UBR1_0 = 0X00;UMCTL_0 = 0x4A;//使能UART0的TXD和RXDME1 |= UTXE0 + URXE0;//使能UART0的RX中断IE1 |= URXIE0;//使能UART0的TX中断IE1 |= UTXIE0;//设置P3.4为UART0的TXDP3SEL |= BIT4;//设置P3.5为UART0的RXDP3SEL |= BIT5;//P3.4为输出管脚P3DIR |= BIT4;}void timerA_Init(void){TACCR0 = rate;TACCTL0 = CCIE;TACTL = TASSEL_2 + MC_1 + TACLR;}interrupt [TIMERA0_VECTOR] void TimerA_ISR(void) {unsigned char index;unsigned char p2 = 0;unsigned char p3 = 0;// 判断步进速率是否需要改变if( change_rate_flag ){TACCR0 = rate;change_rate_flag = 0;}// 判断状态switch( (state & 0x3) ){case 0x00: // 整步、逆时钟方向index = stepIndex & 0x03;p2 |= fullStepA[index];p3 |= fullStepB[index];P2OUT = p2;P3OUT = p3;++stepIndex;break;case 0x01: // 整步、顺时钟方向index = stepIndex & 0x03;p3 |= fullStepA[index];p2 |= fullStepB[index];P3OUT = p3;P2OUT = p2;++stepIndex;break;case 0x02: // 半步、逆时钟方向index = stepIndex & 0x07;p2 |= HalfStepA[index];p3 |= CcwHalfStepB[index];P2OUT = p2;P3OUT = p3;++stepIndex;break;case 0x03: // 半步、顺时钟方向index = stepIndex & 0x07;p3 |= CwHalfStepB[index];p2 |= HalfStepA[index];P3OUT = p3;P2OUT = p2;++stepIndex;break;default: break;}// 如果单步状态下,禁止定时器中断if( state & MOTION_MASK ){TACCTL0 &= ~CCIE;}}////////////////////////////////////////// 处理来自串口0 的接收中断interrupt [UART0RX_VECTOR] void UART0_RX_ISR(void) {//接收来自的数据UART0_RX_BUF[nRX0_Len_temp] = RXBUF0;nRX0_Len_temp += 1;if(nRX0_Len_temp >= 2)if(UART0_RX_BUF[nRX0_Len_temp - 2] == '\r' && UART0_RX_BUF[nRX0_Len_temp - 1] == '\n') {// 过滤掉回车换行(\r\n)if(nRX0_Len_temp == 2){nRX0_Len_temp = 0;}else if(nRX0_Len_temp > 2){nRX0_Len = nRX0_Len_temp;nRev_UART0 = 1;nRX0_Len_temp = 0;}}}////////////////////////////////////////// 处理来自串口0 的发送中断interrupt [UART0TX_VECTOR] void UART0_TX_ISR(void) {if(nTX0_Len != 0){// 表示缓冲区里的数据没有发送完nTX0_Flag = 0;TXBUF0 = UART0_TX_BUF[nSend_TX0];nSend_TX0 += 1;if(nSend_TX0 >= nTX0_Len){nSend_TX0 = 0;nTX0_Len = 0;nTX0_Flag = 1;}}}interrupt [WDT_VECTOR] void WDT_ISR(void){unsigned char sw_state;static unsigned char one_sec_flag = 0;// 获得P1口的输入sw_state = ~P1IN & 0x0f;// 判断是否有键按下if( sw_state == 0x00 ){// 禁止看门狗中断IE1 &= ~WDTIE;// 判断是否S2的激活状态小于1秒if( !one_sec_flag && (SW[1] >= DEBOUNCE_CNT) ){toggle_motion();}// 复位状态计数器SW[0] = 0;SW[1] = 0;SW[2] = 0;SW[3] = 0;// 复位标志one_sec_flag = 0;// 使能P1口的中断功能P1IFG = 0x00;P1IE = 0x0f;}else{// 检查是否是S1状态if( sw_state & 0x01 ){if( SW[0] < ONE_SEC_CNT ){// 增加状态计数器++SW[0];}if( SW[0] == DEBOUNCE_CNT ){toggle_direction();}}else{SW[0] = 0;}// 检查是否是S2状态if( sw_state & 0x02 ){if( SW[1] < ONE_SEC_CNT ){// 增加状态计数器++SW[1];}if( SW[1] == ONE_SEC_CNT )toggle_stepping_mode();one_sec_flag = 1;SW[1] = 0;}}else{// 判断是否S2的激活状态小于1秒if( !one_sec_flag && (SW[1] >= DEBOUNCE_CNT) ) {toggle_motion();}one_sec_flag = 0;SW[1] = 0;}// 检查是否是S3状态if( sw_state & 0x04 ){// 检查是否是连续模式if( (state & MOTION_MASK) == 0 ){if( SW[2] < ONE_SEC_CNT ){// 增加状态计数器++SW[2];}if( SW[2] == DEBOUNCE_CNT ){increase_stepping_rate();}}else // 单步模式{// 增加状态计数器++SW[2];if( (SW[2] % DEBOUNCE_CNT) == 0 ){increase_stepping_rate();}}else{SW[2] = 0;}// 检查是否是S4状态if( sw_state & 0x08 ){if( SW[3] < ONE_SEC_CNT ){// 增加状态计数器++SW[3];}if( SW[3] == DEBOUNCE_CNT ){decrease_stepping_rate();}}else{SW[3] = 0;}}}interrupt [PORT1_VECTOR] void PORT1_ISR(void) {// 禁止端口1的中断P1IE = 0x00;// 清除端口1的中断标志P1IFG = 0x00;// 使能看门狗中断IE1 |= WDTIE;}void increase_stepping_rate(void){unsigned int new_rate;// 检查是否是连续模式if( (state & MOTION_MASK) == 0 )new_rate = rate >> 1;if( new_rate >= max_rate ){rate = new_rate;change_rate_flag = 1;}}//使能定时器A的中断TACCTL0 |= CCIE;}void decrease_stepping_rate(void){// 检查是否是连续模式if( (state & MOTION_MASK) == 0 ){if( rate <= (min_rate >> 1) ){rate <<= 1;change_rate_flag = 1;}}// 使能定时器A的中断TACCTL0 |= CCIE;}void toggle_stepping_mode(void){// 切换步进模式state ^= STEP_MASK;// 检查是否是半步模式if( state & STEP_MASK ){// 从整步模式切换到半步模式// 定时器的频率加倍rate = (rate >> 1);change_rate_flag = 1;max_rate = (MAX_RA TE >> 1);min_rate = (MIN_RATE >> 1);}else // 整步模式// 从半步模式切换到整步模式// 定时器的频率减半rate = (rate << 1);change_rate_flag = 1;max_rate = MAX_RATE;min_rate = MIN_RA TE;}}void toggle_motion(void){state ^= MOTION_MASK;// 检查是否是连续步进模式if( (state & MOTION_MASK) == 0 ){// 使能定时器中断TACCTL0 |= CCIE;}}void toggle_direction(void){state ^= DIR_MASK;}。
基于单片机MSP430F449的宽带直流放大器设计
基于单片机MSP430F449的宽带直流放大器设计王鹏云【摘要】利用单片机MSP430F449设计宽带直流放大器.采用单片机MSP430F449作为宽带直流放大器的控制芯片,利用三级放大器级联的形式实现对输入小信号的放大.其中MSP430F449单片机来控制双路数模转换器TLV5638实现AD603的程控增益调节和整体后级放大模块引入的直流的软件补偿,并利用OPA847作为固定增益放大器.通过实验数据证明整个系统输出稳定,性能良好.该系统具有可行性和实用性.【期刊名称】《电子设计工程》【年(卷),期】2013(021)011【总页数】4页(P71-74)【关键词】宽带;直流;MSP430F449;级联【作者】王鹏云【作者单位】宝鸡文理学院电气系,陕西宝鸡721016【正文语种】中文【中图分类】TN4宽带直流放大器是将输出的微弱信号或通信接收端接收到的空中微弱信号进行提取、放大。
只有将信号放大到一定程度才能满足后级设备的要求,使得分析结果正确。
同时很多电工设备还要求具有一定输出功率,才能驱动后级设备或使通信的发射端将信号有效传输到接收端。
然而面对多种多样的放大要求,现在的放大电路多采用集成电路形式,难以在频带、增益动态范围、功率等参数上满足实际要求,因此本文提出基于单片机MSP430F449的宽带直流放大器,将满足0~10 M带宽范围内的小信号,实现0~100 dB增益的可调范围[1-2]。
1 系统简介单片机MSP430F449为控制芯片,系统总体设计主要由6个模块组成:直流稳压源、前级放大电路、可控增益放大电路、滤波器、功率放大以及控制和显示模块。
系统结构如图1所示。
图1 宽带直流放大器系统结构图Fig.1 A broadband DC amplifier structural figure of system输入信号先经过阻抗匹配后进入40倍固定增益放大器OPA847,通过手动调节端对前级放大器引入的直流和直流零点漂移进行补偿后,进入可控增益放大模块。
自动控制升降旗系统
自动控制升降旗系统本设计是利用德州仪器公司生产的功能强大的MSP系列单片MSP430F449单片机控制步进电机来实现国旗升降的自动控制系统,主要有控制电路、步进电机、lcd 显示屏、唯创知音语音模块。
该自动升降旗系统利用步进电机驱动,通过无线控制按键来控制旗帜的升、降。
并且通过单面机控制步进电机转换模块来转换控制步进角,来实现国旗上升或下降的不同速度,可由BCD拨码盘选取升旗模式,无线遥控升降旗及调速等功能。
1.系统设计目的1.1、在升旗模式下,显示屏显示升旗模式。
按上升键后,国旗匀速上升,同时演奏国歌,上升到最高端自动停止,国歌停奏。
按下降键后,国旗匀速下降,下降到最低端自动停止。
升降旗的时间均是43s。
1.2 、可以避免误动作,国旗无论是在最高端按上升键,在最低端按下降键,还是在升降过程中按上生活下降键,都不起作用。
避免了在升降旗过程中的误操作。
1.3、在升半旗模式下,显示屏显示升旗模式(半),同时一红色发光二极管发光显示。
按上升键后,国旗匀速上升,同时演奏国歌。
上升到最高端是国歌停奏,暂停3s,国旗自动下降到2/3处停止。
按下降键,国旗先由2/3处上升到最高端,再自动从最高端下降到最低端后自动停止。
1.4 、在高度升降模式下,可设定升高高度,按上升键升高到设定高度,按下降键可下降到最低端。
1.5、在调速升降旗模式下,升降旗的升降时间在30-120s内可调,步进一秒,匀速升降。
1.6 、在自由升降旗模式下,按住上升键国旗上升,按住下降键国旗下降,不按键是国旗停止。
1.7 、旗帜的高度和升降旗的模式可以在显示屏上显示。
具有无线遥控升降旗功能。
1.8 、断电保存功能,不论旗帜是在顶端还是在底端,关断电源之后重新合上电源,旗帜所在的高度数据显示不变。
并且接通电源之后在原来的模式下继续工作。
2.方案设计2.1 主控单元的比较与论证2.1.1 方案一:采用MCS-51系列单片机。
经典的MCS-51单片机功能和速度有限;而高档的MCS-51系衍生产品价格昂贵、冗余资源较多、使用范围较窄。
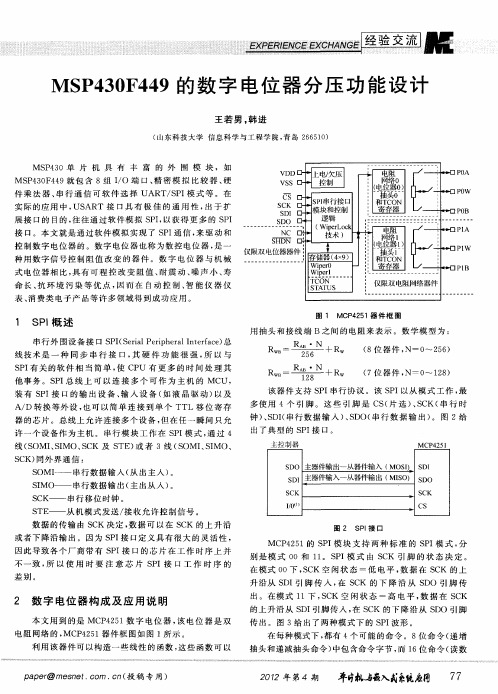
MSP430F449的数字电位器分压功能设计
… — v S口 S
电/ 欠压 控 制 SI P 串行接 口
逻辑
( p ro WieL d
件乘法 器 、 串行 通 信 可 软 件 选 择 UA T S I 式 等 。 在 R /P 模
实 际 的 应用 中 , ART 接 口具 有 极 佳 的 通 用 性 , 于 扩 US 出 展 接 口的 目的 , 往往 通 过 软 件模 拟 S I 以获 得 更 多 的 S I P, P S K l 模块和控制 C E " SO 凸 D
时钟 的上 升沿 , 测 输 入 引脚 P . 检 4 0的 电
() a 模式 I 1
平 , 其 记 入 dt 将 aa中 , 将 P . 再 3 5的 输 出 电 平 拉 低 , 时 就 接 收 好 1个 字 符 位 了 , 后 这 然
将 d t 收 到 的 字 符 位 有 移 1位 , 备 继 aa接 准
MS 4 0 4 9的 数 字 电位 器 分 压 功 能 设 计 P 3F 4
王若 男 , 进 韩
( 山东 科 技 大 学 信 息 科 学 与 工 程 学 院 , 岛 2 6 1 ) 青 6 5 0
MS 4 0单 片 机 具 有 丰 富 的 外 围 模 块 ,如 P3 MS 4 0 4 9就 包 含 8组 I O 端 口 、 密 模 拟 比较 器 、 P 3F 4 / 精 硬
输入 采样
() b 模式【 】 ( 】
图 3 S I 形 图 P波
es le dt a a< < 一 1:
PO 3 UT &一
}
B T ; / C 下 降沿 I5/S K
据 和 写数 据 命 令 ) 包 含命 令 字 节 和 数 据 字 节 。命 令 字 节 中 中包 含 两个 数 据 位 。 图 4给 出 了通 用 S I 令 格式 。 P命
基于单片机MSP430F449的宽带直流放大器设计

( D e p a r t m e n t E l e c t r o n i c&E l e c t r i c a l , B a o j i U n i v e r s i t y o fA r t a n d S c i e n c e s , B a o j i 7 2 1 0 1 6 , C h i n a )
De s i g n t h e wi d t h . b a n d DC a mp l i ie f r b a s e d O n t h e mi c r o c o mp u t e r MS P 4 3 0 F4 4 9
WANG P e n g — - y u n
Ab s t r a c t :T h e d e s i g n u s e s mi c r o c o mp u t e r MS P 4 3 0 F 4 4 9 a s c o n t r o l c h i p t o ma k e a b r o a d b a n d DC a mp l i i f e r . S ma l l s i g n a l i s a mp l i f y b y u s i n g t h e t h r e e - l e v e l c a s c a d e c o n n e c t i o n o f a mp l i i f e r s . he T t wo - wa y D / A c o n v e r t e r T L V5 6 3 8 i s c o n t r o l l e d b y t h e mi c r o c o mp u t e r MS P 4 3 0 F 4 4 9 .Ac h i e v e he t AD6 0 3 p r o g r a mma b l e g a i n c o n t ol r a n d o v e r ll a ra g d e a mp l i i f e r mo d u l e a f t e r he t
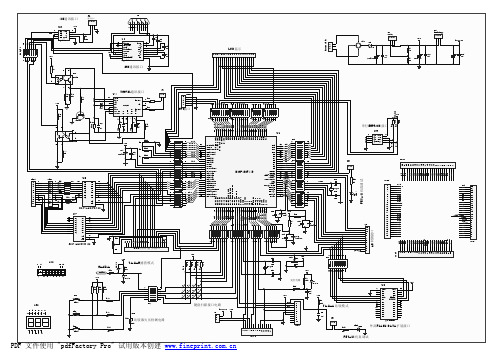
MSP430F449 CPU原理图
P3
51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75
P4.2/STE1 /S39 COM0 P5.2/COM1 P5.3/COM2 P5.4/COM3 R03 P5.5/R13 P5.6/R23 P5.7/R33 DVcc2 DVss2 P4.1/URXD1 P4.0/UTXD1 P3.7/TB6 P3.6/TB5 P3.5/TB4 P3.4/TB3 P3.3/UCLK0 P3.2/SOM I0 P3.1SIMO0 P3.0/STE0 P2.7/ADC12CL K P2.6/CAOUT P2.5/URXD0 P2.4/UTXD0
485通讯接口
U2
Text 1 2 3 4 R0 VCC RE B DE A DI GND MAX3485 12 11 10 9 8 7 8 7 6 5 VCC
J1
通讯接口
J5
1 2 3
1 6 2 7 3 8 4 9 5
R1 120 9 10 11 12 13 14 15 16
EXT_POWER1
U3
U8
GND NC NC CS SCK S1 S0 NC NC NC NC NC NC NC VCC NC NC WP RESET ????????? NC NC NC NC NC NC NC NC 28 27 26 25 24 23 22 21 20 19 18 17 16 15
C14 104 VCC R2 8
P4.2 COM0 COM1 COM2 COM3 R0 3 R1 3 R2 3 R3 3 DVcc2 DVss2 P4.1 P4.0 P3.7 P3.6 P3.5 P3.4 P3.3 P3.2 P3.1 P3.0 P2.7 P2.6 P2.5 P2.4