基于-Fisher准则线性分类器设计
6-线性分类器设计-第六章

k 此法可收敛于W值。W满足: XT(XW-b)=0
令 ρk =
ρ1
其中 ρ 1 为任意常数
因此下降算法不论XTX是否奇异,总能产生一个解。 若训练样本无限的重复出现,则简化为 W1任意 Wk+1=Wk+ρk(bk-WkTXk) Xk k+1
取 ρK
=
ρ1
k
ρk随迭代次数k而减少,以保证算法收敛于满意的W值
其中N/N1有N1个,N/N2有N2个
四 韦—霍氏法(LMS法)迭代法
上节得到MSE法的W解为:W=X+b
伪逆 X + =
(
XT X
)
−1
X
T
计算量很大
在计算X+时, 1. 要求XTX矩阵为非奇异 2 2. 由于计算量太大而引入比较大误差 所以要用迭代法来求 求J(W)的梯度 ▽J(W) =2XT(XW-b) 代入迭代公式 W1任意设定 Wk+1 = Wk-ρkXT(XWk-b)
H wk+1 ρk x
权值修正过程
例题:有两类样本 ω1=(x1,x2)={(1,0,1),(0,1,1)} ω2=(x3,x4)={(1,1,0),(0,1,0)} 解:先求四个样本的增值模式 x1=(1,0,1,1) x2=(0,1,1,1) x3=(1,1,0,1) x4=(0,1,0,1) 假设初始权向量 w1=(1,1,1,1) ρk=1 第一次迭代: w1Tx1=(1,1,1,1) (1,0,1,1)T=3>0 所以不修正 w1Tx2=(1,1,1,1) (0,1,1,1)T=3>0 所以不修正 w1Tx3=(1,1,1,1) (1,1,0,1)T=3>0 所以修正w1 w2=w1-x3=(0,0,1,0) w2Tx4=(0,0,1,0)T (0,1,0,1) =0 所以修正w2 w3=w2-x4=(0,-1,1,-1) 第一次迭代后,权向量w3=(0,-1,1,-1),再进行第2,3,…次迭代 如下表
Fisher准则线性分类器设计

F i s h e r准则线性分类器设计内部编号:(YUUT-TBBY-MMUT-URRUY-UOOY-DBUYI-0128)一 、基于F i s h e r 准则线性分类器设计1、 实验内容: 已知有两类数据1ω和2ω二者的概率已知1)(ωp =,2)(ωp =。
1ω中数据点的坐标对应一一如下:数据:x =y =z =2ω数据点的对应的三维坐标为x2 =y2 =z2 =数据的样本点分布如下图:1)请把数据作为样本,根据Fisher选择投影方向W的原则,使原样本向量在该方向上的投影能兼顾类间分布尽可能分开,类内样本投影尽可能密集的要求,求出评价投影方向W的函数,并在图形表示出来。
取极大值的*w。
用matlab完并在实验报告中表示出来,并求使)J(wF成Fisher线性分类器的设计,程序的语句要求有注释。
2)根据上述的结果并判断(1,,),,,,,,,,,(,,),属于哪个类别,并画出数据分类相应的结果图,要求画出其在W上的投影。
3)回答如下问题,分析一下W的比例因子对于Fisher判别函数没有影响的原因。
2、实验代码x1 =[];x2 =[];x3 =[];%将x1、x2、x3变为行向量x1=x1(:);x2=x2(:);x3=x3(:);%计算第一类的样本均值向量m1m1(1)=mean(x1);m1(2)=mean(x2);m1(3)=mean(x3);%计算第一类样本类内离散度矩阵S1S1=zeros(3,3);for i=1:36S1=S1+[-m1(1)+x1(i) -m1(2)+x2(i) -m1(3)+x3(i)]'*[-m1(1)+x1(i) -m1(2)+x2(i) -m1(3)+x3(i)];end%w2的数据点坐标x4 =[];x5 =[];x6 =[];x4=x4(:);x5=x5(:);x6=x6(:);%计算第二类的样本均值向量m2m2(1)=mean(x4);m2(2)=mean(x5);m2(3)=mean(x6);%计算第二类样本类内离散度矩阵S2S2=zeros(3,3);for i=1:36S2=S2+[-m2(1)+x4(i) -m2(2)+x5(i) -m2(3)+x6(i)]'*[-m2(1)+x4(i) -m2(2)+x5(i) -m2(3)+x6(i)];end%总类内离散度矩阵SwSw=zeros(3,3);Sw=S1+S2;%样本类间离散度矩阵SbSb=zeros(3,3);Sb=(m1-m2)'*(m1-m2);%最优解WW=Sw^-1*(m1-m2)'%将W变为单位向量以方便计算投影W=W/sqrt(sum(W.^2));%计算一维Y空间中的各类样本均值M1及M2for i=1:36y(i)=W'*[x1(i) x2(i) x3(i)]';endM1=mean(y);for i=1:36y(i)=W'*[x4(i) x5(i) x6(i)]';endM2=mean(y);%利用当P(w1)与P(w2)已知时的公式计算W0p1=;p2=;W0=-(M1+M2)/2+(log(p2/p1))/(36+36-2);%计算将样本投影到最佳方向上以后的新坐标X1=[x1*W(1)+x2*W(2)+x3*W(3)]';X2=[x4*W(1)+x5*W(2)+x6*W(3)]'; %得到投影长度XX1=[W(1)*X1;W(2)*X1;W(3)*X1];XX2=[W(1)*X2;W(2)*X2;W(3)*X2]; %得到新坐标%绘制样本点figure(1);plot3(x1,x2,x3,'r*'); %第一类hold onplot3(x4,x5,x6,'gp') ; %第二类legend('第一类点','第二类点');title('Fisher线性判别曲线');W1=5*W;%画出最佳方向line([-W1(1),W1(1)],[-W1(2),W1(2)],[-W1(3),W1(3)],'color','g'); %判别已给点的分类a1=[1,,]';a2=[,,]';a3=[,,]';a4=[,,]';a5=[,,]';A=[a1 a2 a3 a4 a5];n=size(A,2);%下面代码在改变样本时可不修改%绘制待测数据投影到最佳方向上的点for k=1:nA1=A(:,k)'*W;A11=W*A1;%得到待测数据投影y=W'*A(:,k)+W0; %计算后与0相比以判断类别,大于0为第一类,小于0为第二类if y>0plot3(A(1,k),A(2,k),A(3,k),'ro'); %点为"rp"对应第一类plot3(A11(1),A11(2),A11(3),'ro'); %投影为"r+"对应ro类elseplot3(A(1,k),A(2,k),A(3,k),'ch'); %点为"bh"对应ch类plot3(A11(1),A11(2),A11(3),'ch'); %投影为"b*"对应ch类endend%画出最佳方向line([-W1(1),W1(1)],[-W1(2),W1(2)],[-W1(3),W1(3)],'color','m');view([,30]);axis([-2,3,-1,3,,]);grid onhold off3、实验结果根据求出最佳投影方向,然后按照此方向,将待测数据进行投影。
使用Fisher线性判别方法的提取分类器
文, 用 , … 分别表示 个个体分类器 , , … } 。
1 问题 形 式化 描述 及个 体分 类器 训练
对分 类问题而 言 , 问题 域为 类 对象 , 类别标 签分别为
,
, , 。每—个样本可以表示成一个 d 的权重特征向 J …, , 维
个体 分类器 训练指从 数据集 中训练 获得这 个分 类器 的过
p tr En iern n pia o s 2 1 4 ( 4 :3 - 3 . ue g e ig a d Ap l t n . 0 0。6 I ) 1 2 1 4 n ci
Ab t a t I r e o ei n t e aii ewe n n e ld ca s ir n mp o e f c n tb l y o o i e , n a p o c sr c : n od r t l mi ae rl t t b t e e s mb e ls i e a d i r v e e t a d sa i t f c mbn r a p r a h vy f s f i
e ta t ca sfes xr ci ng l si r ba e o Fih r i e r ic i n n a lss s o o e I c n e uc ca sfe s c wih ih i e in, i sd n s e ln a ds rmi a t nay i i pr p s d.t a r d e l s i r pa e i t hg dm nso
FISHER分类
Fisher 线性判别分类器成员姓名: 学号:莫文敏 201111921217 赵越 201111921229 顾瑞煌 201111921104一、实验目的1.实现基于FISHER 分类的算法程序;2.能够根据自己的设计加深对FISHER 分类的认识;3.掌握FISHER 分类的原理、特点。
二、实验设备1.手提电脑2.MATLAB三、FISHER 算法原理线性判别函数的一般形式可表示成0)(w X W X g T +=其中⎪⎪⎪⎭⎫ ⎝⎛=d x x X 1 ⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=d w w w W 21但是,在应用统计方法解决模式识别的问题时,经常会遇到“维数风暴”的问题,因此压缩特征空间的维数在此时十分重要,FISHER 方法实际上是涉及维数压缩的问题。
把多为特征空间的点投影到一条直线上,就能把特征空间压缩成一维,这在数学上是很容易做到的。
但是在高维空间里很容易一分开的样品,把它们投射到任意一条直线上,有可能不同类别的样品就混在一起,无法区分了,如图5-16(a )所示,投影1x 或2x 轴无法区分。
若把直线绕原点转动一下,就有可能找到一个方向,样品投射到这个方向的直线上,各类样品就能很好地分开,如图5-16(b )所示。
因此直线方向的选择是很重要的。
一般来说总能找到一个最好的方向,使样品投射到这个方向的直线上很容易分开。
如何找到这个最好的直线方向以及如何实现向最好方向投影的变换,这正是FISHER 算法要解决的基本问题,这个投影变换正是我们寻求的解向量*W 。
样品训练集以及待测样品的特征总数目为n ,为找到最佳投影方向,需要计算出各类样品的均值、样品类内离散度矩阵i S 和总类间矩阵w S 、样品类间离散度矩阵b S ,根据FISHER 准则找到最佳投影向量,将训练集内所有样品进行投影,投影到一维Y 空间,由于Y 空间是一维的,则需要求出Y 空间的划分边界点,找到边界点后,就可以对待测样品进行一维Y 空间的投影,判断它的投影点与分界点的关系将其归类。
基于Fisher的分类器设计

7
8 9 10 11 12
2
3 4 1 3 3
2
3 4 1 3 3
13
14 15 16 17 18
1
2 4 2 4 3
1
2 4 2 4 2
19
20 21 22 23 24
4
2 2 3 3 1
4
2 3 3 3 1
25
26 27 28 29 30
1
4 1 3 3 3
1
4 1 3 3 3
结果分析:从表中可以看出有2个分类结果是错的,正确率为93.3%。
T
0 1
y y , x
0
2
算法实现
◆ 流程图
算法实现
◆ 样本均值
clear,close all; N=29; %N为训练样本总个数 X = [1495.18 1957.44 3498.02 %X为训练样本 1125.17 1594.39 2937.73 1269.07 1910.72 2701.97 …… ……] m1=mean(X(1:11,:)); %求得第一类样本均值 m2=mean(X(12:29,:)); %求得第二类样本均值
y0
Fisher投影原理
Fisher分类器设计
样本在d维特征空间的一些描述量 (1)各类样本均值 m 1 m i 1,2 x N (2)样本类内离散度矩阵 S 与总类内离散度矩阵 S
i
i X i i
i
w
S ( X m )( X m )
i X wi i i
T
基于Fisher的分类器设计
主 单 讲:周润景 教授 位:电子信息工程学院
基于Fisher准则线性分类器设计
基于Fisher 准则线性分类器设计一、实验类型设计型:线性分类器设计(Fisher 准则)二、实验目的本实验旨在让同学进一步了解分类器的设计概念,能够根据自己的设计对线性分类器有更深刻地认识,理解Fisher 准则方法确定最佳线性分界面方法的原理,以及Lagrande 乘子求解的原理。
三、实验条件matlab 软件四、实验原理线性判别函数的一般形式可表示成0)(w X W X g T += 其中⎪⎪⎪⎭⎫⎝⎛=d x x X 1根据Fisher 选择投影方向W 的原则,即使原样本向量在该方向上的投影能兼顾类间分布尽可能分开,类内样本投影尽可能密集的要求,用以评价投影方向W 的函数为:2221221~~)~~()(S S m m W J F +-= )(211*m m S W W -=-⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=d w w w W 21我们称为线性变换,其中式一个向量,1-W S 是W S 的逆矩阵,如21m m -是d 维,W S 和1-W S 都是d ×d 维,得到的*W 也是一个d 维的向量。
向量*W 就是使Fisher 准则函数)(W J F 达极大值的解,也就是按Fisher 准则将d 维X 空间投影到一维Y 空间的最佳投影方向,该向量*W 的各分量值是对原d 维特征向量求加权和的权值。
以上讨论了线性判别函数加权向量W 的确定方法,并讨论了使Fisher 准则函数极大的d 维向量 的计算方法,但是判别函数中的另一项0W 尚未确定,一般可采用以下几种方法确定0W 如或者 或当1)(ωp 与2)(ωp 已知时可用[]⎥⎦⎤⎢⎣⎡-+-+=2)(/)(ln 2~~2121210N N p p m m W ωω……当W 0确定之后,则可按以下规则分类,2010ωω∈→->∈→->X w X W X w X W TT使用Fisher 准则方法确定最佳线性分界面的方法是一个著名的方法,尽管提出该方法的时间比较早,仍见有人使用。
《模式识别》课程实验 线性分类器设计实验
《模式识别》课程实验线性分类器设计实验一、实验目的:1、掌握Fisher 线性分类器设计方法;2、掌握感知准则函数分类器设计方法。
二、实验内容:1、对下列两种情况,求采用Fisher 判决准则时的投影向量和分类界面,并做图。
12{(2,0),(2,2),(2,4),(3,3)}{(0,3),(2,2),(1,1),(1,2),(3,1)}T T T T T T T T T ωω⎧=⎪⎨=-----⎪⎩ 12{(1,1),(2,0),(2,1),(0,2),(1,3)}{(1,2),(0,0),(1,0),(1,1),(0,2)}T T T T T T T T T T ωω⎧=⎪⎨=-----⎪⎩ 2、对下面的两类分类问题,采用感知准则函数,利用迭代修正求权向量的方法求两类的线性判决函数及线性识别界面,并画出识别界面将训练样本区分的结果图。
12{(1,1),(2,0),(2,1),(0,2),(1,3)}{(1,2),(0,0),(1,0),(1,1),(0,2)}T T T T T T T T T T ωω⎧=⎪⎨=-----⎪⎩ 三、实验原理:(1)Fisher 判决准则投影方向:*112()w w S μμ-=-(2)感知准则函数:()()kT p z Z J v v z ==-∑当k Z为空时,即()0J v ,*v即为所求p四、解题思路:1、fisher线性判决器:A.用mean函数求两类样本的均值B.求两类样本的均值的类内离散矩阵SiC.利用类内离散矩阵求总类内离散矩阵SwD.求最佳投影方向WoE.定义阈值,并求得分界面2、感知准则函数分类器:A.获得增广样本向量和初始增广权向量B.对样本进行规范化处理C.获得解区,并用权向量迭代修正错分样本集,得到最终解区五、实验结果:1、fisher线性判决分类器:条件:取pw1=pw2=0.5,阈值系数为0.5A.第一种情况B.第二种情况2、感知准则函数判决:条件:取步长row为1判决结果:六、结果分析:1、fisher线性判决器中,调整阈值系数时,分界面会随之平行上下移动,通过调整阈值系数的大小,就能比较合理的得到分界面。
基于Fisher判别分析的贝叶斯分类器
并且从贝叶斯分类器学习的过程来看,无法有效地使用类间 信息。 为了改善这一问题,本文结合 Fisher 线性判别分析,提 出了一种基于 Fisher 线性判别分析的贝叶斯分类器的改进算 法。该算法的主要思想是利用变换矩阵,对原始训练样本进 行变换,投影到新的样本空间,分类器在投影后的新的样本 空间进行学习分类。原样本属性集中,任意 2 个属性间可能 存在一定的依赖关系,投影后在新样本空间,新样本的属性 假定为相互独立。通过变换可把维数较高的测量空间中表示 的模式变为在维数较低的特征空间中表示的模式。这样能有 效地实现分类识别,从而得到能较好反映分类本质的特征。 根据上述分析给出该算法的流程如图 1 所示。
c i =1 T
T
(6)
(7)
显然,类内散布矩阵表达的是同一类中样本到类内中心 的距离,其值的大小表示同类样本的集中程度。其值越小, 说明同类样本相对越集中;类间散布矩阵是不同类的中心距 离的度量,其值越大,说明异类样本的可分性越好。如果能 够使得在投影后的空间,类内样本集中,类间样本分离,即 可达到目的 [2] 。从高维空间向低维空间的投影过程中,类内 散布矩阵和类间散布矩阵经历了一些变换。本文目标是寻找 一个投影方向变换矩阵 W,能在某种意义上使投影后的类间 散布矩阵和类内散布矩阵的比值最大。为此定义如下的准则 函数:
(
)
(1)
其物理意义为:在观测得到的特征向量发生的条件下,
第 37 卷
第 10 期
曹玲玲,潘建寿:基于 Fisher 判别分析的贝叶斯分类器
163
决策结果。 2.2 Fisher 线性判别分析 Fisher 线性判别分析方法是模式识别中一种行之有效的 Fisher 线性判别分析力图找到一组最佳的投 特征提取方法 [4]。 影方向,在这些投影方向上,可以最好的区分训练集中属于 不同类别的样本。 设有一组 d 维的训练样本 x1 , x2 ," , xn ( xi 为 d 维行向量,
FISHER分类器(FISHER
3.5 Fisher分类器(Fisher Linear Discriminant)Fisher判别法是历史上最早提出的分类方法之一,其基本思想是将n类m维数据集尽可能地投影到一个方向(一条直线),使得类与类之间尽可能地分开。
从形式上看,该方法就是一种所谓的降维处理方法。
为简单起见,我们以两类问题ω1和ω2的分类来说明Fisher判别法的原理,如图3.5所示。
设训练集数据阵为X∈R N⨯m,ω1共有N1个样本,ω2共有N2个样本,样本总数N= N1+N2,这两个类别在输入空间的均值向量为图3.5, Fisher判别法几何原理示意图)37.3(11212211⎪⎪⎩⎪⎪⎨⎧∈=∈=∑∑∈∈m p m p R N R N pp ωωx xx μx μ设有一个投影方向()mT m R w w w ∈=,...,,21w ,这两个均值向量在该方向的投影为)38.3(1~1~1222111121⎪⎪⎩⎪⎪⎨⎧∈==∈==∑∑∈∈R N R N pp p T T p T T ϖϖx xx w μw μx w μw μ(3-38)表示的是两个数。
在w方向,两均值之差为())39.3(~~2121μμw μμ -=-=∇T类似地,样本总均值向量在该方向的投影为)40.3(1~11R NNp p T T ∈==∑=x w μw μ定义类间散度(Between-class scatter )平方和SS B 为()()()()()()()()()[])41.3(~~~~~~222111222211221222211wS w w μμμμμμμμw μw μw μw μw μμμμμμ B T T T T T T T T j j j B N N N N N N N SS =--+--=-+-=-=-+-=∑=其中,类间散度阵为()()()()()())42.3(21222111∑=--=--+--=j T j j j TT B N N N μμμμμμμμμμμμS若将所有样本用所在类别的均值所代表,则类间散度平方和SS B 为这N 个均值到训练集总均值在最佳投影方向上投影之差的平方和。
基于Fisher线性判别的基因分类器的设计

基于Fisher 线性判别的基因分类器的设计2000年6月人类基因组计划正式完成对人类分布在细胞核中的23条染色体的6万到10万个基因,大约30亿个碱基的测序工作,其中我国完成对3号染色体上的3000万个碱基的测序。
基因草图是由4个字符A 、T 、C 、G 按一定顺序排列组成的长约30亿的序列,其中没有断句,也没有标点。
除了知道这四个字符代表四种碱基之外,人类对基因知之甚少。
但众多的科研工作者发现,NDA 的序列中隐藏这重大的秘密,关系到人的生老病死,对基因的研究具有重大的意义。
本文对DNA 中的四种碱基:腺嘌呤(A ),鸟嘌呤(G ),胞嘧啶(C )和胸腺嘧啶(T )在基因链中出现的频率作为输入向量的四个特征成员,用Fisher 线性分类方法对已知类别的20个基因样本进行训练和测试,表明Fisher 线性分类方法能对这些已知类别的DNA 序列达到分类的目的。
本文采用的数据来自参考文献[1],数据表1所示:显然表1中的样本共分为两类,其中0P >的为一类,在神经网络中以输出为“1”表示;0P <的为另一类,在神经网络中以输出为“0”表示。
Fisher 线性判别:Fisher 线性判别的基本思想是将d 维空间中的样本投射到一维空间中的一条直线上,将维度由多维压缩到一维。
在一维的直线上找到一个阈值点,大于该阈值点的样本分为一类,小于该阈值点的样本分为另一类。
基于以上思想,假设集合ψ包含N 个d 维样本123,,,......N x x x x 其中1N 个属于1ψ的样本,2N 个属于2ψ的样本。
若对n x 的分量做线性组合,可得到标量,1,2,3,......T n n y x n N ω==这样便得到N 个一维样本n y 的集合,可分为两个子集12,y y 。
从几何上,如果||||1ω=,则每个n y 就是对应于n x 到方向为ω的直线的投影。
ω方向的不同,将使样本投影后的可分程度不同,从而直接影响识别的效果。
实验三 线性分类器

线性分类器设计一、实验要求在本次实验中,将基于线性判别函数来设计线性分类器。
给出在两类情况下,基于几个常用的准则函数(准则函数包括Fisher准则,感知准则,最小平方误差即MSE准则)的线性分类器设计方法以及线性支持向量机分类,选择其中两种方法分别设计线性分类器并评价结果。
二、实验目的首先明确线性判别函数的基本概念和设计线性分类器的核心要求。
然后熟练掌握基于几个常用的准则函数和支持向量机进行线性分类器的设计,了解各个准则函数的相同和不同之处,各准则函数的特点。
最后要求掌握结果评价的方法。
三、实验结果1.基于Fisher准则函数来设计线性分类器。
Fisher线性判别的思想是:将所有的样本都投影到Fisher准则下的最佳投影方向,这样能保证投影后类间相隔远,而类内尽可能聚集。
然后在这个一维空间中确定一个分类的阈值,过这个阈值点且与投影方向垂直的超平面就是两类的分类面。
Fisher线性判别函数为:(1)两类样本线性可分由上图可以看出,当样本是线性可分的时候,Fisher准则函数能够较好的确定阈值、找出分类面。
(2)两类样本线性不可分当样本集线性不可分时,能找到最佳投影方向,投影后两类的样本还是混在一起,存在错分的现象2.基于感知准则函数来设计线性分类器。
感知器准则函数的思想是:找到一个解向量a,能够使规范化增广样本向量都满足,i=1,2,…,N。
为规范化增广样本向量感知器线性判别函数为:决策规则是:如果,则样本属于第一类,如果,则样本属于第二类。
为了使解向量更加靠近解区中间、更加可靠,可以适当的引入余量b,此时求解解向量的方程变为。
解向量可以用梯度下降方法来迭代求解,在求解解向量的过程中,采用不同的初始权向量、不同的步长、不同的余量求解得到的解向量会有所不同。
(1)两类样本线性可分(初始权向量[0;0;0],步长1,不考虑余量)(2)两类样本线性不可分(初始权向量[0;0;0],步长1,迭代次数 4800次)当用感知器来处理线性不可分的样本时,找不到一个解向量能够满足所有的样本,算法不收敛,上图为迭代4800次的结果。
基于Fisher准则改进线性判别回归分类的人脸识别

基于Fisher准则改进线性判别回归分类的人脸识别曾贤灏;李向伟【摘要】为了提高线性回归分类LRC(Linear Regression Classification)算法的鲁棒性,提出一种基于Fisher准则改进的线性判别回归分类算法。
首先根据Fisher准则最大化类间重建误差与类内重建误差的比值,为LRC找到最优投影矩阵;然后利用最优投影矩阵将训练图像及测试图像投影到各个类的特征子空间;最后,计算出测试图像与各个训练图像之间的欧氏距离,并利用K-近邻分类器完成人脸的识别。
在FERET和AR人脸数据库上的实验验证了本文算法的有效性。
实验结果表明,相比其他回归分类算法,该算法取得了更好的识别效果。
%Toimprovetherobustnessoflinearregressionclassification(LRC)algorith m,weproposealineardiscriminantregression classification algorithm which is improved based on Fisher criterion.First,it maximises the ratio of between-class reconstruction error and within-class reconstruction error according to Fisher criterion so as to find the optimal projection matrix for LRC.Then it makes use of the optimal projection matrix to project all training and testing images to subspace of every class.Finally,it computes Euclidean distances between the testing images and each training image and uses K-nearest neighbour classifier to finish face recognition.The effectiveness of the proposed algorithm is verified by experiment on FERET and AR face databases.Experimental results show that the proposed algorithm achieves better recognition effect compared with other regression classification approaches.【期刊名称】《计算机应用与软件》【年(卷),期】2014(000)009【总页数】4页(P184-186,271)【关键词】人脸识别;Fisher准则;线性判别;线性回归分类;K-近邻分类器【作者】曾贤灏;李向伟【作者单位】兰州工业学院电子信息工程系甘肃兰州730050;兰州工业学院软件工程系甘肃兰州730050【正文语种】中文【中图分类】TP3910 引言人脸自动识别系统[1,2]通常使用人脸图像来识别特定的身份,已广泛地应用于生物特征认证的人机交互中,如视频监控和访问控制等[3,4]。
feisher线性判别分类器的设计实验报告()
实验二 Fisher 线性判别实验一、实验目的应用统计方法解决模式识别问题的困难之一是维数问题, 低维特征空间的分类问题一般比高维空间分类问题简单。
因此, 人们力图将特征空间进行降维, 降维的一个基本思路是将 d 维特征空间投影到一条直线上, 形成一维空间, 这在数学上比较容易实现。
问题的关键是投影之后原来线性可分的样本可能变为线性不可分。
一般对于线性可分的样本, 总能找到一个投影方向, 使得降维后样本仍然线性可分。
如何确定投影方向使得降维以后, 样本不但线性可分, 而且可分性更好(即不同类别的样本之间的距离尽可能远,同一类别的样本尽可能集中分布),就是 Fisher 线性判别所要解决的问题。
本实验通过编制程序让初学者能够体会 Fisher 线性判别的基本思路,理解线性判别的基本思想,掌握 Fisher 线性判别问题的实质。
二、实验原理Fisher 线性判别分类器(Fisher Linear Discriminant Analysis,FLDA ),此方法的基本思想是在Fisher 准则下,先求解最佳鉴别矢量,然后将高维的样本投影到最佳鉴别矢量张成的空间,使投影后的样本在低维空间有最大类间距离和最小类内距离,这样在低维空间中样本将有最佳的可分性,分类是一项非常基本和重要的任务,并有着极其广泛的应用。
分类是利用预定的已分类数据集构造出一个分类函数或分类模型(也称作分类器),并利用该模型把未分类数据映射到某一给定类别中的过程。
分类器的构造方法很多,主要包括规则归纳、决策树、贝叶斯、神经网络、粗糙集、以及支持向量机(SVM)等方法。
其中贝叶斯分类方法建立在贝叶斯统计学[v1和贝叶斯网络[s1基础上,能够有效地处理不完整数据,并且具有模型可解释、精度高等优点,而被认为是最优分类模型之一[9]。
尤其是最早的朴素贝叶斯分类器[l0l 虽然结构简单,但在很多情况下却具有相当高的分类精度,可以达到甚至超过其它成熟算法如c4.5[l ’]的分类精度,而且对噪声数据具有很强的抗干扰能力。
作业二 基于Fisher准则线性分类器设计
作业二 F i s h e r线性判别分类器一 实验目的 本实验旨在让同学进一步了解分类器的设计概念,能够根据自己的设计对线性分类器有更深刻地认识,理解Fisher 准则方法确定最佳线性分界面方法的原理,以及Lagrande 乘子求解的原理。
二 实验条件Matlab 软件三 实验原理线性判别函数的一般形式可表示成0)(w X W X g T += 其中根据Fisher 选择投影方向W 的原则,即使原样本向量在该方向上的投影能兼顾类间分布尽可能分开,类内样本投影尽可能密集的要求,用以评价投影方向W 的函数为:)(211*m m S W W -=-上面的公式是使用Fisher 准则求最佳法线向量的解,该式比较重要。
另外,该式这种形式的运算,我们称为线性变换,其中21m m -式一个向量,1-W S 是W S 的逆矩阵,如21m m -是d 维,W S 和1-W S 都是d ×d 维,得到的*W 也是一个d 维的向量。
向量*W 就是使Fisher 准则函数)(W J F 达极大值的解,也就是按Fisher 准则将d 维X 空间投影到一维Y 空间的最佳投影方向,该向量*W 的各分量值是对原d 维特征向量求加权和的权值。
以上讨论了线性判别函数加权向量W 的确定方法,并讨论了使Fisher 准则函数极大的d 维向量*W 的计算方法,但是判别函数中的另一项0W 尚未确定,一般可采用以下几种方法确定0W 如 或者 m N N m N m N W ~~~2122110=++-= 或当1)(ωp 与2)(ωp 已知时可用当W 0确定之后,则可按以下规则分类,2010ωω∈→-<∈→->X w X W X w X W T T四 实验程序及结果分析%w1中数据点的坐标x1 =[0.2331 1.5207 0.6499 0.7757 1.0524 1.19740.2908 0.2518 0.6682 0.5622 0.9023 0.1333-0.5431 0.9407 -0.2126 0.0507 -0.0810 0.73150.3345 1.0650 -0.0247 0.1043 0.3122 0.66550.5838 1.1653 1.2653 0.8137 -0.3399 0.51520.7226 -0.2015 0.4070 -0.1717 -1.0573 -0.2099];x2 =[2.3385 2.1946 1.6730 1.6365 1.7844 2.01552.0681 2.1213 2.4797 1.5118 1.9692 1.83401.87042.2948 1.7714 2.3939 1.5648 1.93292.2027 2.4568 1.7523 1.6991 2.4883 1.72592.0466 2.0226 2.3757 1.7987 2.0828 2.07981.94492.3801 2.2373 2.1614 1.9235 2.2604];x3 =[0.5338 0.8514 1.0831 0.4164 1.1176 0.55360.6071 0.4439 0.4928 0.5901 1.0927 1.07561.0072 0.4272 0.4353 0.9869 0.4841 1.09921.0299 0.7127 1.0124 0.4576 0.8544 1.12750.7705 0.4129 1.0085 0.7676 0.8418 0.87840.9751 0.7840 0.4158 1.0315 0.7533 0.9548];%将x1、x2、x3变为行向量x1=x1(:);x2=x2(:);x3=x3(:);%计算第一类的样本均值向量m1m1(1)=mean(x1);m1(2)=mean(x2);m1(3)=mean(x3);%计算第一类样本类内离散度矩阵S1S1=zeros(3,3);for i=1:36S1=S1+[-m1(1)+x1(i) -m1(2)+x2(i) -m1(3)+x3(i)]'*[-m1(1)+x1(i)-m1(2)+x2(i) -m1(3)+x3(i)];end%w2的数据点坐标x4 =[1.4010 1.2301 2.0814 1.1655 1.3740 1.18291.7632 1.97392.4152 2.5890 2.8472 1.95391.2500 1.2864 1.26142.0071 2.1831 1.79091.3322 1.1466 1.7087 1.59202.9353 1.46642.9313 1.8349 1.8340 2.5096 2.7198 2.31482.0353 2.6030 1.2327 2.1465 1.5673 2.9414];x5 =[1.0298 0.9611 0.9154 1.4901 0.8200 0.93991.1405 1.0678 0.8050 1.2889 1.4601 1.43340.7091 1.2942 1.3744 0.9387 1.2266 1.18330.8798 0.5592 0.5150 0.9983 0.9120 0.71261.2833 1.1029 1.2680 0.7140 1.2446 1.33921.1808 0.5503 1.4708 1.1435 0.7679 1.1288];x6 =[0.6210 1.3656 0.5498 0.6708 0.8932 1.43420.9508 0.7324 0.5784 1.4943 1.0915 0.76441.2159 1.3049 1.1408 0.9398 0.6197 0.66031.3928 1.4084 0.6909 0.8400 0.5381 1.37290.7731 0.7319 1.3439 0.8142 0.9586 0.73790.7548 0.7393 0.6739 0.8651 1.3699 1.1458];x4=x4(:);x5=x5(:);x6=x6(:);%计算第二类的样本均值向量m2m2(1)=mean(x4);m2(2)=mean(x5);m2(3)=mean(x6);%计算第二类样本类内离散度矩阵S2S2=zeros(3,3);for i=1:36S2=S2+[-m2(1)+x4(i) -m2(2)+x5(i) -m2(3)+x6(i)]'*[-m2(1)+x4(i) -m2(2)+x5(i) -m2(3)+x6(i)];end%总类内离散度矩阵SwSw=zeros(3,3);Sw=S1+S2;%样本类间离散度矩阵SbSb=zeros(3,3);Sb=(m1-m2)'*(m1-m2);%最优解WW=Sw^-1*(m1-m2)'%将W变为单位向量以方便计算投影W=W/sqrt(sum(W.^2));%计算一维Y空间中的各类样本均值M1及M2for i=1:36y(i)=W'*[x1(i) x2(i) x3(i)]';endM1=mean(y)for i=1:36y(i)=W'*[x4(i) x5(i) x6(i)]';endM2=mean(y)%利用当P(w1)与P(w2)已知时的公式计算W0p1=0.6;p2=0.4;W0=-(M1+M2)/2+(log(p2/p1))/(36+36-2);%计算将样本投影到最佳方向上以后的新坐标X1=[x1*W(1)+x2*W(2)+x3*W(3)]';X2=[x4*W(1)+x5*W(2)+x6*W(3)]';%得到投影长度XX1=[W(1)*X1;W(2)*X1;W(3)*X1];XX2=[W(1)*X2;W(2)*X2;W(3)*X2];%得到新坐标%绘制样本点figure(1)plot3(x1,x2,x3,'r*') %第一类hold onplot3(x4,x5,x6,'bp') %第二类legend('第一类点','第二类点')title('Fisher 线性判别曲线')W1=5*W;%画出最佳方向line([-W1(1),W1(1)],[-W1(2),W1(2)],[-W1(3),W1(3)],'color','b');%判别已给点的分类a1=[1,1.5,0.6]';a2=[1.2,1.0,0.55]';a3=[2.0,0.9,0.68]';a4=[1.2,1.5,0.89]';a5=[0.23,2.33,1.43]';A=[a1 a2 a3 a4 a5]n=size(A,2);%下面代码在改变样本时都不必修改%绘制待测数据投影到最佳方向上的点for k=1:nA1=A(:,k)'*W;A11=W*A1;%得到待测数据投影y=W'*A(:,k)+W0;%计算后与0相比以判断类别,大于0为第一类,小于0为第二类 if y>0plot3(A(1,k),A(2,k),A(3,k),'go'); %点为"rp"对应第一类plot3(A11(1),A11(2),A11(3),'go'); %投影为"r+"对应go 类elseplot3(A(1,k),A(2,k),A(3,k),'m+'); %点为"bh"对应m+类plot3(A11(1),A11(2),A11(3),'m+'); %投影为"b*"对应m+类endend%画出最佳方向line([-W1(1),W1(1)],[-W1(2),W1(2)],[-W1(3),W1(3)],'color','k');view([-37.5,30]);axis([-2,3,-1,3,-0.5,1.5]);grid onhold off实验结果和数据:首先根据求出最佳投影方向,然后按照此方向,将待测数据进行投影 。
基于线性判别分析的分类器设计研究

基于线性判别分析的分类器设计研究随着机器学习技术的不断发展,各种分类器也越来越多。
其中,基于线性判别分析的分类器(Linear Discriminant Analysis Classifier,LDA Classifier)在模式识别、人脸识别、图像分类等领域被广泛应用,并取得了不错的效果。
本文就设计基于线性判别分析的分类器进行研究并总结其中的相关内容。
一、线性判别分析简介线性判别分析也称为Fisher判别分析,是一种经典的线性分类方法,常用于数据降维和数据分类。
其主要目的就是将一组数据区分为两个或更多个类别,并确定识别边界。
线性判别分析认为,不同类别的数据在某个方向上的投影差异最大,而同一类别的数据在该方向上的投影差异最小。
二、基于线性判别分析的分类器设计基于线性判别分析的分类器是基于数据的线性辨别方向进行分类的,其设计流程如下:1. 数据预处理设计任何分类器之前,首先需要对原始数据进行预处理,包括数据清洗、特征提取、特征选择等。
对于线性判别分析,其输入数据应该是已经处理过的特征向量。
2. 计算类内离散度矩阵和类间离散度矩阵类内离散度矩阵描述了每个类别内部数据的分布情况,而类间离散度矩阵则描述了各个类别之间的分布情况。
通过计算这两个离散度矩阵,可以得到数据在各个方向上的投影差异大小。
3. 计算投影方向将类内离散度矩阵和类间离散度矩阵进行特征值分解,可以得到各个方向上的特征向量。
取特征值最大的前n个特征向量作为投影方向,即可使数据在该方向上的投影分布有最大的差异。
4. 计算阈值和决策边界在确定了投影方向后,需要计算阈值和决策边界,以将输入数据分类到不同的类别中。
阈值通常是基于训练数据中的类别分布情况确定的,而决策边界则是根据阈值及数据投影的分布情况确定的。
5. 模型训练和预测利用训练数据,可对分类器进行训练和优化。
而在实际应用中,需要将测试数据输入分类器,根据分类器预测结果判断其所属的类别。
三、优缺点及应用基于线性判别分析的分类器具有以下优点:1. 矩阵运算简单,计算复杂度低。
Fisher判别准则实现分类
图形图像处理上机实验报告
第 1 页 共 1 页 上机实验报告
课程名称:人工智能
年级: 上机实验成绩: 指导教师:
姓名: 上机实践名称:Fisher 判别准则实现分类
学号: 上机实验日期:
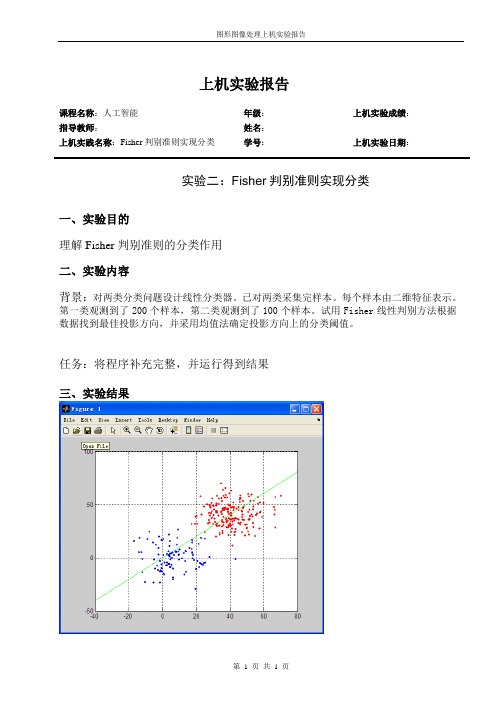
实验二:Fisher 判别准则实现分类
一、实验目的
理解Fisher 判别准则的分类作用
二、实验内容
背景:对两类分类问题设计线性分类器。
已对两类采集完样本。
每个样本由二维特征表示。
第一类观测到了200个样本,第二类观测到了100个样本。
试用Fisher 线性判别方法根据数据找到最佳投影方向,并采用均值法确定投影方向上的分类阈值。
任务:将程序补充完整,并运行得到结果
三、实验结果。
线性分类器的设计与比较

线性分类器的设计与比较张智泉首先论文根据Fisher 判别准则在一维空间的投影,提出了数据线性不可分度的概念。
而后论文中新提出了一个改进的SVM 算法——根据两类数据集的离散程度来限定原SVM 中样本到超平面的期望间距,从而使得模型更具有稳健性。
在论文最后提出了利用数据中信息的凝练程度来比较数据的推广性能或模型的稳健性能。
分类在机器学习、模式识别、数据挖掘等领域中都有很大的研究,且在现实生活中也有很多需要用到分类的问题,比如信用卡消费领域中对欺诈消费行为者的分类,互联网中对日益增多的垃圾邮件的监测与识别,在医学领域通过核磁共振的扫描结果判断肿瘤是否是恶性等。
分类在日常中有很深刻的且很广的应用,分类算法的研究对人类生活有很大的积极意义。
1. 线性分类器设计对于每个已知的训练样本,在原SVM 的不等式约束优化问题的基础上,加上一个间距约束条件式后,则SVM 优化问题可转化为:21022021min ..1T T T w w ws t w x w w x w a θθ=+≥+≤-=-根据原SVM 求解方法,定义拉格朗日函数:1000211(,,)(1)()n n T T Ti i j j i j L w w w w w x w w x w a ααα===-+-+++∑∑经过推理得到:1220111(,,)n ni i j i j L w w θαααθ===+∑∑其约束条件为:10,1,2,,0i ni i i i ny αα=≥==∑2. 线性分类器比较对于各种线性分类器的研究各自都有较大的发展,同时对于由于线性分类问题的基本问题——数据线性可分性判定研究也有较大进步。
张银川等在文献中介绍了基于几何的判定法则,而D.Elizondo 等在文献实验了一些线性可分问题的测试判断准则,最后总结出这些判断原始数据可分方法可以分为五组:解线性方程组的判断、计算几何的判断、基于神经网络的判断、二次规划方法判断以及Fisher 线性判别函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Fisher准则线性分类器设计专业:电子信息工程学生:子龙学号:201316040117一、实验类型设计型:线性分类器设计(Fisher 准则)二、实验目的本实验旨在让同学进一步了解分类器的设计概念,能够根据自己的设计对线性分类器有更深刻地认识,理解Fisher 准则方法确定最佳线性分界面方法的原理,以及Lagrande 乘子求解的原理。
三、实验条件matlab 软件四、实验原理线性判别函数的一般形式可表示成 0)(w X W X g T+= 其中⎪⎪⎪⎭⎫⎝⎛=d x x X Λ1⎪⎪⎪⎪⎪⎭⎫⎝⎛=d w w w W Λ21根据Fisher 选择投影方向W 的原则,即使原样本向量在该方向上的投影能兼顾类间分布尽可能分开,类样本投影尽可能密集的要求,用以评价投影方向W 的函数为:2221221~~)~~()(S S m m W J F +-= )(211*m m S W W -=-上面的公式是使用Fisher 准则求最佳法线向量的解,该式比较重要。
另外,该式这种形式的运算,我们称为线性变换,其中21m m -式一个向量,1-W S 是W S 的逆矩阵,如21m m -是d 维,W S 和1-W S 都是d ×d 维,得到的*W 也是一个d 维的向量。
向量*W 就是使Fisher 准则函数)(W J F 达极大值的解,也就是按Fisher 准则将d 维X 空间投影到一维Y 空间的最佳投影方向,该向量*W 的各分量值是对原d 维特征向量求加权和的权值。
以上讨论了线性判别函数加权向量W 的确定方法,并讨论了使Fisher 准则函数极大的d 维向量*W 的计算方法,但是判别函数中的另一项0W 尚未确定,一般可采用以下几种方法确定0W 如2~~210m m W +-= 或者 m N N m N m N W ~~~2122110=++-= 或当1)(ωp 与2)(ωp 已知时可用[]⎥⎦⎤⎢⎣⎡-+-+=2)(/)(ln 2~~2121210N N p p m m W ωω……当W 0确定之后,则可按以下规则分类,2010ωω∈→->∈→->X w X W X w X W TT使用Fisher 准则方法确定最佳线性分界面的方法是一个著名的方法,尽管提出该方法的时间比较早,仍见有人使用。
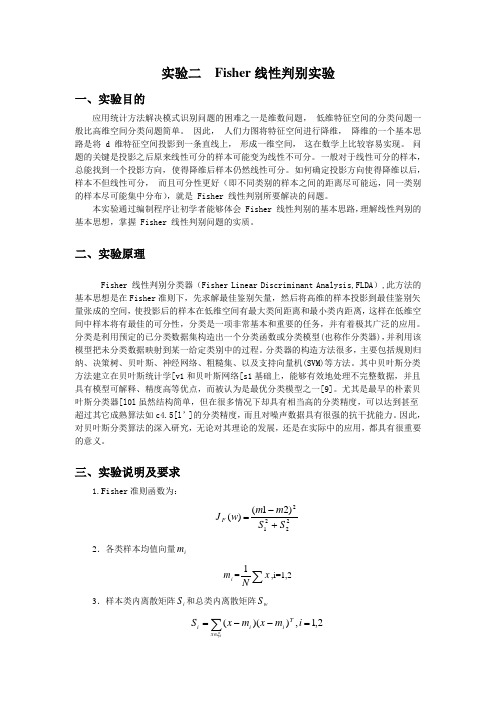
五、实验容已知有两类数据1ω和2ω二者的概率已知1)(ωp =0.6,2)(ωp =0.4。
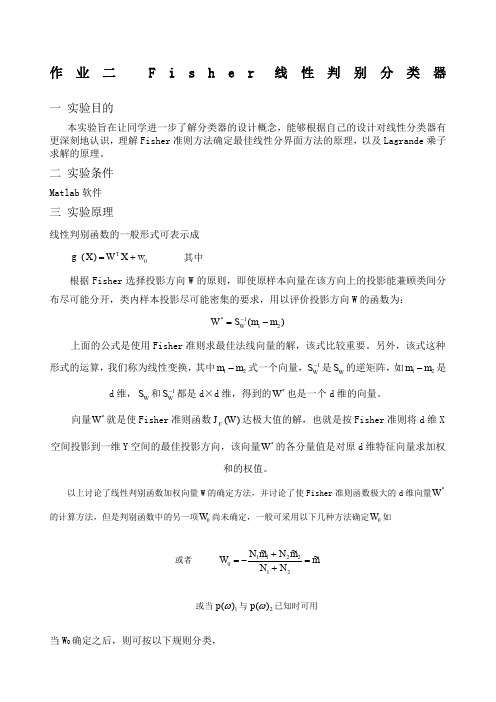
1ω中数据点的坐标对应一一如下:数据:x1 =0.2331 1.5207 0.6499 0.7757 1.0524 1.1974 0.2908 0.2518 0.6682 0.5622 0.9023 0.1333 -0.5431 0.9407 -0.2126 0.0507 -0.0810 0.7315 0.3345 1.0650 -0.0247 0.1043 0.3122 0.6655 0.5838 1.1653 1.2653 0.8137 -0.3399 0.5152 0.7226 -0.2015 0.4070 -0.1717 -1.0573 -0.2099 x2 =2.3385 2.1946 1.6730 1.6365 1.7844 2.0155 2.0681 2.1213 2.4797 1.5118 1.9692 1.83401.87042.2948 1.7714 2.3939 1.5648 1.93292.2027 2.4568 1.7523 1.6991 2.4883 1.7259 2.0466 2.0226 2.3757 1.7987 2.0828 2.0798 1.9449 2.3801 2.2373 2.1614 1.9235 2.2604 x3 =0.5338 0.8514 1.0831 0.4164 1.1176 0.55360.6071 0.4439 0.4928 0.5901 1.0927 1.07561.0072 0.4272 0.4353 0.9869 0.4841 1.0992 1.0299 0.7127 1.0124 0.4576 0.8544 1.1275 0.7705 0.4129 1.0085 0.7676 0.8418 0.8784 0.9751 0.7840 0.4158 1.0315 0.7533 0.9548 数据点的对应的三维坐标为2x1 =1.4010 1.23012.0814 1.1655 1.3740 1.18291.7632 1.97392.4152 2.5890 2.8472 1.9539 1.2500 1.2864 1.2614 2.0071 2.1831 1.79091.3322 1.1466 1.7087 1.59202.9353 1.46642.9313 1.8349 1.8340 2.5096 2.7198 2.3148 2.0353 2.6030 1.2327 2.1465 1.5673 2.9414x2 =1.0298 0.9611 0.9154 1.4901 0.8200 0.9399 1.1405 1.0678 0.8050 1.2889 1.4601 1.4334 0.7091 1.2942 1.3744 0.9387 1.2266 1.18330.8798 0.5592 0.5150 0.9983 0.9120 0.71261.2833 1.1029 1.2680 0.7140 1.2446 1.3392 1.1808 0.5503 1.4708 1.1435 0.7679 1.1288 x3 =0.6210 1.3656 0.5498 0.6708 0.8932 1.43420.9508 0.7324 0.5784 1.4943 1.0915 0.76441.2159 1.3049 1.1408 0.9398 0.6197 0.6603 1.3928 1.4084 0.6909 0.8400 0.5381 1.3729 0.7731 0.7319 1.3439 0.8142 0.9586 0.7379 0.7548 0.7393 0.6739 0.8651 1.3699 1.1458数据的样本点分布如下图:图 1:样本点分布图六、实验要求1) 请把数据作为样本,根据Fisher 选择投影方向W 的原则,使原样本向量在该方向上的投影能兼顾类间分布尽可能分开,类样本投影尽可能密集的要求,求出评价投影方向W 的函数,并在图形表示出来。
并在实验报告中表示出来,并求使)(w J F 取极大值的*w 。
用matlab 完成Fisher 线性分类器的设计,程序的语句要求有注释。
2) 根据上述的结果并判断(1,1.5,0.6)(1.2,1.0,0.55),(2.0,0.9,0.68),(1.2,1.5,0.89),(0.23,2.33,1.43),属于哪个类别,并画出数据分类相应的结果图,要求画出其在W 上的投影。
3) 回答如下问题,分析一下W 的比例因子对于Fisher 判别函数没有影响的原因。
七、实验结果1、源代码x1=[0.2331 1.5207 0.6499 0.7757 1.0524 1.1974 ...0.2908 0.2518 0.6682 0.5622 0.9023 0.1333 ...-0.5431 0.9407 -0.2126 0.0507 -0.0810 0.7315 ...0.3345 1.0650 -0.0247 0.1043 0.3122 0.6655 ...0.5838 1.1653 1.2653 0.8137 -0.3399 0.5152 ...0.7226 -0.2015 0.4070 -0.1717 -1.0573 -0.2099]';y1=[2.3385 2.1946 1.6730 1.6365 1.7844 2.0155 ...2.0681 2.1213 2.4797 1.5118 1.9692 1.8340 ...1.87042.2948 1.7714 2.3939 1.5648 1.9329 ...2.2027 2.4568 1.7523 1.6991 2.4883 1.7259 ...2.0466 2.0226 2.3757 1.7987 2.0828 2.0798 ...1.94492.3801 2.2373 2.1614 1.9235 2.2604]';z1=[0.5338 0.8514 1.0831 0.4164 1.1176 0.5536 ...0.6071 0.4439 0.4928 0.5901 1.0927 1.0756 ...1.0072 0.4272 0.4353 0.9869 0.4841 1.0992 ...1.0299 0.7127 1.0124 0.4576 0.8544 1.1275 ...0.7705 0.4129 1.0085 0.7676 0.8418 0.8784 ...0.9751 0.7840 0.4158 1.0315 0.7533 0.9548]'; %存储第一类点x2=[1.4010 1.2301 2.0814 1.1655 1.3740 1.1829 ...1.7632 1.97392.4152 2.5890 2.8472 1.9539 ...1.2500 1.2864 1.26142.0071 2.1831 1.7909 ...1.3322 1.1466 1.7087 1.59202.9353 1.4664 ...2.9313 1.8349 1.8340 2.5096 2.7198 2.3148 ...2.0353 2.6030 1.2327 2.1465 1.5673 2.9414]';y2=[1.0298 0.9611 0.9154 1.4901 0.8200 0.9399 ...1.1405 1.0678 0.8050 1.2889 1.4601 1.4334 ...0.7091 1.2942 1.3744 0.9387 1.2266 1.1833 ...0.8798 0.5592 0.5150 0.9983 0.9120 0.7126 ...1.2833 1.1029 1.2680 0.7140 1.2446 1.3392 ...1.1808 0.5503 1.4708 1.1435 0.7679 1.1288]';z2=[0.6210 1.3656 0.5498 0.6708 0.8932 1.4342 ...0.9508 0.7324 0.5784 1.4943 1.0915 0.7644 ...1.2159 1.3049 1.1408 0.9398 0.6197 0.6603 ...1.3928 1.4084 0.6909 0.8400 0.5381 1.3729 ...0.7731 0.7319 1.3439 0.8142 0.9586 0.7379 ...0.7548 0.7393 0.6739 0.8651 1.36991.1458]'; %存储第二类点Pw1=0.6Pw2=0.4%求第一类点的均值向量m1m1x=mean(x1(:)) %全部平均m1y=mean(y1(:)) %全部平均m1z=mean(z1(:)) %全部平均m1=[m1xm1ym1z]%求第二类点的均值向量m2m2x=mean(x2(:)) %全部平均m2y=mean(y2(:)) %全部平均m2z=mean(z2(:)) %全部平均m2=[m2xm2ym2z]%求第一类类离散矩阵S1S1=zeros(3,3)for i=1:36S1=S1+([x1(i),y1(i),z1(i)]'-m1)*([x1(i),y1(i),z1(i)]'-m1)'end%求第二类类离散矩阵S2S2=zeros(3,3)for i=1:36S2=S2+([x2(i),y2(i),z2(i)]'-m2)*([x2(i),y2(i),z2(i)]'-m2)'end%求总类离散度矩阵SwSw=S1+S2%求向量W*W=(inv(Sw))*(m1-m2)%画出决策面x=0:.1:2.5y=0:.1:3[X,Y]=meshgrid(x,y)Z=(W(1)*X+W(2)*Y)/(-W(3))mesh(X,Y,Z)%保持hold on%透视决策面hidden off%求第一类样品的投影值均值Y1=0for i=1:36Y1=Y1+W'*[x1(i),y1(i),z1(i)]'endM1=Y1/36%求第二类样品的投影值均值Y2=0for i=1:36Y2=Y2+W'*[x2(i),y2(i),z2(i)]'endM2=Y2/36%选取阈值Y0Y0=(M1+M2)/2+(log(Pw1)/log(Pw2))/70%判定未知样品类别X1=[1,1.5,0.6]'if W'*X1>Y0disp('点X1(1,1.5,0.6)属于第一类')plot3(1,0.5,0.6,'or')elsedisp('点X1(1,1.5,0.6)属于第二类')plot3(1,0.5,0.6,'ob')endX2=[1.2,1.0,0.55]'if W'*X2>Y0disp('点X2(1.2,1.0,0.55)属于第一类') plot3(1.2,1.0,0.55,'or')elsedisp('点X2(1.2,1.0,0.55)属于第二类') plot3(1.2,1.0,0.55,'ob')endX3=[2.0,0.9,0.68]'if W'*X3>Y0disp('点X3(2.0,0.9,0.68)属于第一类') plot3(2.0,0.9,0.68,'or')elsedisp('点X3(2.0,0.9,0.68)属于第二类') plot3(2.0,0.9,0.68,'ob')endX4=[1.2,1.5,0.89]'if W'*X4>Y0disp('点X4(1.2,1.5,0.89)属于第一类') plot3(1.2,1.5,0.89,'or')elsedisp('点X4(1.2,1.5,0.89)属于第二类')plot3(1.2,1.5,0.89,'ob')endX5=[0.23,2.33,1.43]'if W'*X5>Y0disp('点X5(0.23,2.33,1.43)属于第一类')plot3(0.23,2.33,1.43,'or')elsedisp('点X5(0.23,2.33,1.43)属于第二类')plot3(0.23,2.33,1.43,'ob')end2、决策面图2:决策面(红色代表第一类,蓝色代表第二类)3、参数决策面向量W =-0.07980.2005-0.0478阈值Y0 =0.1828样本点分类X1 =1.00001.50000.6000点X1(1,1.5,0.6)属于第一类X2 =1.20001.00000.5500点X2(1.2,1.0,0.55)属于第二类X3 =2.00000.90000.6800点X3(2.0,0.9,0.68)属于第二类X4 =1.20001.50000.8900点X4(1.2,1.5,0.89)属于第二类X5 =0.23002.33001.4300点X5(0.23,2.33,1.43)属于第一类八、实验分析1、比例因子决策面向量W 的比例因子并不影响判别函数。