第三章遥感成像原理与遥感图像特征1235节PPT课件
合集下载
第三章遥感成像原理与遥感图像特征

覆盖类f型: 望,远它镜所系记统录的的焦是距一种复合信号响应。因此,一般 图像包含的是“纯像元”和“混合”像元的集合体,这依 赖于IFOV的大小和地面物体的空间复杂性。I F O V
一、遥感图像特征
(4)地面分辨率的计算
摄影方式:
Rg Rs f H
Rs:胶片的分辨率和摄影镜头的分辨率所构成的系统 分辨率,单位线对/mm
6.5km/s,在扫描一次的时间里卫星正好向前移动474m,因此扫描线正
好衔接。
0.5~0.6μm 0.6~0.7μm
扫描方向
.m 1
m
2
...k m 3
...m 4
5
0.7~0.8μm
0.8~1.1μm
卫
星
10.4~12.6μm 前 进
方
向
6
成像板
一、遥感图像特征
一般来说:遥感系统的空间分辨率越高,其识别 物体的能力越强。但实际上每一目标在图像上的可 分辨程度,不完全决定于空间分辨率的具体值,而 是和它的形状、大小,以及它与周围物体亮度、结 构的相对差有关(反差)。例如MSS的空间分辨率 为79m,但是宽仅10-20m的铁路,公路,当它们通 过沙漠、水域、草原等背景光谱较单调或与道路光 谱差异大的地区,往往清晰可辨。
一、遥感图像特征
(3)瞬时视场(IFOV)
指遥感器内单个探测元件的受光角度或观测视野。单位为
毫弧度(mrad)。
S
S ➢IFOV越小,最小可分辨单元越小,空间分辨率越高。 f
f ➢IFOV取决于遥感器光学系统和探测器的大小。
➢一个瞬S:时探视测场元内件的的信边息长,表示一个像元。
➢在任何H:一遥个感给平定台的的瞬航时高视场内,往往包含着不止一种地面H
一、遥感图像特征
(4)地面分辨率的计算
摄影方式:
Rg Rs f H
Rs:胶片的分辨率和摄影镜头的分辨率所构成的系统 分辨率,单位线对/mm
6.5km/s,在扫描一次的时间里卫星正好向前移动474m,因此扫描线正
好衔接。
0.5~0.6μm 0.6~0.7μm
扫描方向
.m 1
m
2
...k m 3
...m 4
5
0.7~0.8μm
0.8~1.1μm
卫
星
10.4~12.6μm 前 进
方
向
6
成像板
一、遥感图像特征
一般来说:遥感系统的空间分辨率越高,其识别 物体的能力越强。但实际上每一目标在图像上的可 分辨程度,不完全决定于空间分辨率的具体值,而 是和它的形状、大小,以及它与周围物体亮度、结 构的相对差有关(反差)。例如MSS的空间分辨率 为79m,但是宽仅10-20m的铁路,公路,当它们通 过沙漠、水域、草原等背景光谱较单调或与道路光 谱差异大的地区,往往清晰可辨。
一、遥感图像特征
(3)瞬时视场(IFOV)
指遥感器内单个探测元件的受光角度或观测视野。单位为
毫弧度(mrad)。
S
S ➢IFOV越小,最小可分辨单元越小,空间分辨率越高。 f
f ➢IFOV取决于遥感器光学系统和探测器的大小。
➢一个瞬S:时探视测场元内件的的信边息长,表示一个像元。
➢在任何H:一遥个感给平定台的的瞬航时高视场内,往往包含着不止一种地面H
第3章 遥感成像原理与遥感图像特征
深海和海底)
海面实测资料的校正
海洋卫星简介
(1)Seasat1
“雨云”7号卫星(Nimbus-7) 日本海洋观测卫星(MOS1) ERS(欧空局) 加拿大雷达卫星(RADARSAT)
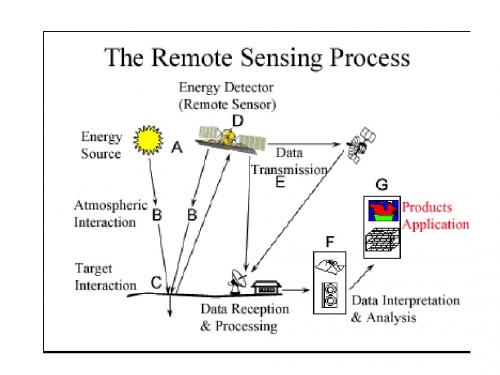
遥感成像原理
摄影成像
定义:摄影是通过成像设备获取物体影像 的技术。 传统摄影:依靠光学镜头及放置在焦平面的感光胶片
★开创了海洋遥感和微波遥感的新阶段,为观测海
况,研究海面形态、海面温度、风场、海冰、大
气含水量等开辟了新途径。
海洋遥感的特点
需要高空和空间的遥感平台,以进行大 面积的同步覆盖观测 以微波为主(1、穿透云层、2、海水温度盐度、粗
糙度的监测)
电磁波与激光、声波的结合是扩大海洋 遥感探测手段的一条新路(应用范围可延伸到
被动微波遥感
通过传感器,接收来自目标地物发射的微 波,而达到探测目的的遥感方式称被动微 波遥感。 被动接收目标地物微波辐射的传感器为微 波辐射计 被动探测目标地物微波散射特性的传感器 为微波散射计
遥感图像特征
遥感影像的特征
目标地物的大小、形状及空间分布特点; 目标地物的属性特点; 目标地物的变化动态特点。
垂直投影:不存在投影面的倾斜。
地形起伏的影响
中心投影:地形起伏造成像点位移。
垂直投影:不存在像点位移。
像点位移
像点位移量与地面高差h和像点到 像主点的距离r成正比关系,与航 高H成反比关系。
像片的比例尺
像片上两点之间的距离与地面上相应两点实际 距离之比。
航高未知时?
第一,已知某一地面目标的大小,可以通 过量测其在像片上的影像而算出该像片的 比例尺。 第二,若具有摄影地区的地形图,先在像 片上和地形图上找到两个地物的对应点, 然后分别在像片上和地形图上量得其长度。
海面实测资料的校正
海洋卫星简介
(1)Seasat1
“雨云”7号卫星(Nimbus-7) 日本海洋观测卫星(MOS1) ERS(欧空局) 加拿大雷达卫星(RADARSAT)
遥感成像原理
摄影成像
定义:摄影是通过成像设备获取物体影像 的技术。 传统摄影:依靠光学镜头及放置在焦平面的感光胶片
★开创了海洋遥感和微波遥感的新阶段,为观测海
况,研究海面形态、海面温度、风场、海冰、大
气含水量等开辟了新途径。
海洋遥感的特点
需要高空和空间的遥感平台,以进行大 面积的同步覆盖观测 以微波为主(1、穿透云层、2、海水温度盐度、粗
糙度的监测)
电磁波与激光、声波的结合是扩大海洋 遥感探测手段的一条新路(应用范围可延伸到
被动微波遥感
通过传感器,接收来自目标地物发射的微 波,而达到探测目的的遥感方式称被动微 波遥感。 被动接收目标地物微波辐射的传感器为微 波辐射计 被动探测目标地物微波散射特性的传感器 为微波散射计
遥感图像特征
遥感影像的特征
目标地物的大小、形状及空间分布特点; 目标地物的属性特点; 目标地物的变化动态特点。
垂直投影:不存在投影面的倾斜。
地形起伏的影响
中心投影:地形起伏造成像点位移。
垂直投影:不存在像点位移。
像点位移
像点位移量与地面高差h和像点到 像主点的距离r成正比关系,与航 高H成反比关系。
像片的比例尺
像片上两点之间的距离与地面上相应两点实际 距离之比。
航高未知时?
第一,已知某一地面目标的大小,可以通 过量测其在像片上的影像而算出该像片的 比例尺。 第二,若具有摄影地区的地形图,先在像 片上和地形图上找到两个地物的对应点, 然后分别在像片上和地形图上量得其长度。
03_1遥感成像原理与遥感图像特征
2.3.3 卫星姿态和坐标
2.3.4 运行周期
• 天球 • 天球坐标系
z
黄北极
r δ α
S(x,y,z)
y
x
黄南极
2.3.1 轨道参数
开普勒轨道参数
首先,用两参数描述轨道椭圆大小和形状: ——长半轴a; ——偏心率e;
其次,用两参数固定轨道平面方向位置: ——轨道面倾角i; ——升交点赤经Ω; 接着,确定椭圆方向: ——近地点角ω; 最后,需定义在给定时刻(历元t)时卫星在轨道的位置: ——真近点角v;
空中运载工具
(航空遥感)
气球 遥感用汽车
地面运载工具
遥感用艇船
各种遥感平台的相对高度
2.2 地面遥感平台和航空遥感平台
2.2.1 地面遥感
三角架、遥感吊车:5米-50米 遥感塔:30米-400米 滑翔机,遥控飞机:50米-500米 气球:500米-800米 用途: 地物波谱测量,近距离 摄影测量等。
三轴定向和姿态控制
要保持卫星姿态相对稳定,控制 3轴,3角度,共6个自由度。
X 卫星运动方向 Y 赤道面内垂直X轴 Z 垂直地球 偏航κ 滚动ω
ω 滚动 φ 俯仰 κ 偏航
俯仰φ
2.3.4 卫星运行周期和覆盖周期
1) 卫星运行周期 卫星绕地球运行一周所需要的时间,称为卫星周期(T)。 2) 卫星覆盖周期 卫星覆盖全球一次的天数。对遥感动态监测更重要。 LANDSAT 16 SPOT 26 NOVA 12
2.4 航天遥感平台
航天遥感按照用途分为三大系列:
气象卫星系列(FY-1、FY-2、NOAA) 陆地卫星系列(CBERS、Landsat、SPOT)
海洋卫星系列(Seasat、ERS、RADARSAT)
【精品】第三章-遥感成像原理与遥感图像特征..幻灯片
要求探测元件的响应时间至少要<0.2μs的1/3。
• 固体自扫描中: 用一竖列的10个探测元件同时扫,每个元件只扫51条线,则 在瞬时视场的停留时间为2μs。 若用一竖列的512个探测元件同时扫,只要一次自扫描即可, 像刷子刷过一样。此时,CCD探测元件与地面上的像元(瞬时 视场)相对应,靠遥感平台前进运动就可直接以刷式扫描成像。
(2)线对数(line pairs)
对于摄影系统而言,影像最小单元常通过1mm间隔内包 含的线对数确定,单位为线对/mm。所谓线对指一对同等大 小的明暗条纹或规则间隔的明暗条对。
一、遥感图像特征
(3)瞬时视场(IFOV)
指遥感器内单个探测元件的受光角度或观测视野。单位为
毫弧度(mrad)。
S
S ➢IFOV越小,最小可分辨单元越小,空间分辨率越高。 f f ➢IFOV取决于遥感器光学系统和探测器的大小。
4 5
0.7~0.8μm
0.8~1.1μm
卫
星
10.4~12.6μm 前 进
方
向
6
成像板
一、遥感图像特征
一般来说:遥感系统的空间分辨率越高,其识别 物体的能力越强。但实际上每一目标在图像上的可 分辨程度,不完全决定于空间分辨率的具体值,而 是和它的形状、大小,以及它与周围物体亮度、结 构的相对差有关(反差)。例如MSS的空间分辨率 为79m,但是宽仅10-20m的铁路,公路,当它们通 过沙漠、水域、草原等背景光谱较单调或与道路光 谱差异大的地区,往往清晰可辨。
成像方式遥感器 扫描成像类型(光电成像类型) 微波成像类型(雷达成像类型)
二、 遥感传感器
⑴ 摄影成像类型
① 摄影成像原理:通过成像设备获取物体影像的技术。 ② 分类
• 固体自扫描中: 用一竖列的10个探测元件同时扫,每个元件只扫51条线,则 在瞬时视场的停留时间为2μs。 若用一竖列的512个探测元件同时扫,只要一次自扫描即可, 像刷子刷过一样。此时,CCD探测元件与地面上的像元(瞬时 视场)相对应,靠遥感平台前进运动就可直接以刷式扫描成像。
(2)线对数(line pairs)
对于摄影系统而言,影像最小单元常通过1mm间隔内包 含的线对数确定,单位为线对/mm。所谓线对指一对同等大 小的明暗条纹或规则间隔的明暗条对。
一、遥感图像特征
(3)瞬时视场(IFOV)
指遥感器内单个探测元件的受光角度或观测视野。单位为
毫弧度(mrad)。
S
S ➢IFOV越小,最小可分辨单元越小,空间分辨率越高。 f f ➢IFOV取决于遥感器光学系统和探测器的大小。
4 5
0.7~0.8μm
0.8~1.1μm
卫
星
10.4~12.6μm 前 进
方
向
6
成像板
一、遥感图像特征
一般来说:遥感系统的空间分辨率越高,其识别 物体的能力越强。但实际上每一目标在图像上的可 分辨程度,不完全决定于空间分辨率的具体值,而 是和它的形状、大小,以及它与周围物体亮度、结 构的相对差有关(反差)。例如MSS的空间分辨率 为79m,但是宽仅10-20m的铁路,公路,当它们通 过沙漠、水域、草原等背景光谱较单调或与道路光 谱差异大的地区,往往清晰可辨。
成像方式遥感器 扫描成像类型(光电成像类型) 微波成像类型(雷达成像类型)
二、 遥感传感器
⑴ 摄影成像类型
① 摄影成像原理:通过成像设备获取物体影像的技术。 ② 分类
第三章遥感成像原理及遥感图像特征
3.1.1 遥感平台
遥感平台(platform)是搭载传感器的工具。 根据运载工具的类型划分:
航天平台 150km以上, 卫星、宇宙飞船。
航空平台 百米至十余千米,低、中、高空飞机以及飞船、气球等。
地面平台 0—50m, 车、船、塔等。
3.1.2 卫星的轨道参数
卫星在空间运行,遵循天体运动的开普勒三定律。
一、太阳同步轨道
( sun-synchronous satellite orbit ) 卫星的轨道面以与地球的公转方向相同方向而同时旋转的 近圆形轨道。
卫星的轨道平面与赤道平面的夹角一般是不会变的, 但会 绕地球自转轴旋转。
轨道平面绕地球自转轴旋转的方向与地球公转的方向相同 ,旋转的角速度等于地球公转的平均角速度, 即0.9856度 /日或360度/年, 这样的轨道称为太阳同步轨道。
四、卫星的轨道参数
•赤道坐标系 赤道坐标系是取赤道面为基准 面,以地球自转轴、以及从地 心指向春分点的直线为坐标轴 所构成的坐标系。虽然由于地 轴的运动,该坐标系相对于恒 星其位置是变动的,但是,对 于轨道寿命有限的卫星运动来 说,影响很小。
开普勒的轨道参数
五、开普勒的6个参数
(1)轨道倾角 轨道平面与地球赤道平面的夹角。具体计算是在卫星轨道
➢ 风云一号C卫星轨道参数 轨道特征:太阳同步轨道 轨道高度:863km 轨道倾角:98.79° 轨道偏心率:0.00188 轨道回归周期:10.61天 轨道降交点地方时:8∶34(1999-07-04)
二、陆地卫星
1、Landsat卫星
• Landsat是美国于1972年在世界上第1次发射的真正的地球观测卫星,由于 它的出色的观测能力推动了卫星遥感的飞跃发展。是太阳同步轨道卫星 。 星上搭载多光谱扫描仪(MSS)和专题扫描仪(TM)两种遥感器。 Landsat -1用于国内和国外的大范围研究,验证研究数据对探测、绘制、测 量和评定地球资源和环境条件的实际应用。 Landsat -2具有更大的能力,能白天和夜晚测量来自陆地和水面的辐射。有 效载荷基本上与Landsat -1相同。 Landsat -3用于继续研究和发展中分辨力多光谱遥感系统。 TM是4号星以后搭载的。6号星以后仅搭载ETM,并予定追加IFOV为15m 的全色波段。
遥感遥感成像基本原理和遥感图像特性
§3.1 遥感平台与遥感器
3.1.2 遥感器与遥感图像特征参数
三、遥感器的性能指标
❖ 它的性能决定遥感的能力,即传感器对电磁波段的响应 能力、传感器的空间分辨率及图像的几何特征、传感器 获取地物信息量的大小和可靠程度。
❖ 传感器的分辨率是遥感技术及其应用中的一个重要概念 ,也是衡量遥感数据质量特征的一个重要指标
全景摄影机(扫描摄影机)
多光谱摄影机
数码摄影机
§3.2 摄影成像
❖ 航空平台:高度在百米~10多km,包括低、中、 高空飞机,以及飞艇、气球等。
❖ 航天平台:高度在150km以上,其中最高的是位 于赤道上空36000km高的静止卫星,其次是 700~900km高的陆地观测卫星,航天飞机一般 在240~350km高度。。
In situ spectroradiometer
Coarse or low resolution
Fine or high resolution
光谱(波谱)分辨率
图像遥的感光器谱的分工辨作波率段:在传“感大器气在窗接口”收目中间标选辐择射。的波 谱根时据所理能论分分析辨和的实最际小经波验长效果间相隔结(合传进感行器综各合个考波段 的虑宽。度保)证,分间类隔精愈度的小情,况分下辨放率宽愈波谱高段。,(P以82保,F证3.26)
❖ 按传感器的工作波段分为:可见光传感器、红外传感器 和微波传感器,从可见光到红外区的光学波段的传感器 统称光学传感器,微波领域的传感器统称为微波传感器
§3.1 遥感平台与遥感器
二、遥感器的分类
❖ 按工作方式分为
(1)主动方式传感器:侧视雷达、激光雷达、 微波辐射计。
(2)被动方式传感器:航空摄影机、多光谱扫 描仪(MSS)、TM、ETM、HRV、红外扫描仪 等。
三遥感成像原理与遥感图像特征 123页PPT文档
§1 传感器
二、传感器的分类
按工作方式分为: 主动方式传感器:侧视雷达、激光雷达、微
波辐射计。 被动方式传感器:航空摄影机、多光谱扫描
仪(MSS)、TM、ETM(1,2)、HRV、红外扫 描仪等。
§1 传感器
三、 传感器的组成
收集器:收集来自地物目标镜、天线。 探测器:将收集的辐射能转变成化学能或电能。 处理器:将探测后的化学能或电能等信号进行处 理。 输出:将获取的数据输出。
§3 航空遥感数据
七、航空像片的比例尺
航摄相机的焦距f与航高H的比。 航片的比例尺:1/M=f/H 。
比例尺随着图像处理而变化。 大比例尺航片:1:5 000~1:10 000。 中比例尺航片:1:10 000~1:30 000。 小比例尺航片:1:30 000~1:100 000。 地形起伏也会影响比例尺。
返回
亮度系数
亮度系数(P):在相同照度条件下,某物体的亮度与
绝对白体理想表面的亮度之比。 亮度系数的特点:
(1)亮度系数的范围0≤P ≤1;
(2)相同地物,由于干湿程度不同,亮度系数也不同; (3)亮度系数与物体表面的颜色有关; (4)表面光滑的物体比粗糙的物体亮度系数大; (5)许多性质完全不同的物体具有相同的亮度系数。
航片的比例尺随航高而改变。
地形的起伏和投影面的倾斜会引起航片上像点的 位置的变化,叫像点位移。
航空像片用亮度系数来表示地物的反射率。
NEXT
垂直投影和中心投影的区别
1)投影距离的影响:垂直投影图像的缩小和 放大与投影距离无关,并有统一的比例尺。中 心投影则受投影距离影响,像片比例尺与平台 高度和焦距有关。 2)投影面倾斜的影响:当投影面倾斜时,垂 直投影的影像仅表现为比例尺有所放大,像点 相对位置不变;而中心投影的比例关系有显著 变化,各点的相对位置和形状不再保持原来的 样子。 3)地形起伏的影响:垂直投影时,随地面起 伏变化,投影点之间的距离与地面实际水平距 离成比例缩小,相对位置不变;中心投影时, 地面起伏越大,像上投影点水平位置的位移量 就越大,产生投影误差。
第三章遥感成像原理与遥感图像特征ppt课件

是静止的,这种卫星轨道叫地球静止卫星轨道。
地球静止卫星轨道是地球同步轨道的特例,它
只有一条。
编辑版pppt
7
附录:3 卫星轨道及其运行特点
在地球静止卫星轨道运行的卫星的覆
盖范围很广,利用均布在地球赤道上的 3
颗这样的卫星就可以实现除南北极很小一
部分地区外的全球通信。
编辑版pppt
8
§1 遥感平台
➢ 摄影机外壳材料:不同波段选用不同材料
➢ 镜头:根据所摄取的波段选择。
编辑版pppt
12
§2 摄影成像-摄影机
2、全景摄影机-扫描摄影机
缝隙式(或航带摄影机)和镜头转动式摄影机。
➢不是一幅一幅地曝光,而是连续曝光,不需快门。
➢为了得到清晰的影像必须满足:
f
WP Wi W
H
➢缺点?
编辑版pppt
分辨率较高的感光片);
摄影技术(包括曝光量的选择、感光片的冲洗以及印
像、放大技术)。
编辑版pppt
44
航空像片的分辨率
是衡量胶片分辨地物细部能力的一种指标。
用单位距离内能分辨的线宽与间隔相等的平行细
线的数目来表示。
主要取决于航摄相机的镜头分辨率和感光乳剂的
分辨率。但景物的反差、大气的光学条件、飞机
扫描成像过程当旋转棱镜旋转时第一个镜面对地面横越航线方向扫视一次在扫描视场内的地面辐射能由幅的一边到另一边依次进入传感器经探测器输出视频信号再经电子放大器放大和调制在阴极射线管上显示出一条相应于地面扫描视场内的景物的图像线这条图像线经曝光后在底片上记录下来
第三章遥感成像原理与遥感图像
特征
讲授教师:张彦丽
30
编辑版pppt
31
地球静止卫星轨道是地球同步轨道的特例,它
只有一条。
编辑版pppt
7
附录:3 卫星轨道及其运行特点
在地球静止卫星轨道运行的卫星的覆
盖范围很广,利用均布在地球赤道上的 3
颗这样的卫星就可以实现除南北极很小一
部分地区外的全球通信。
编辑版pppt
8
§1 遥感平台
➢ 摄影机外壳材料:不同波段选用不同材料
➢ 镜头:根据所摄取的波段选择。
编辑版pppt
12
§2 摄影成像-摄影机
2、全景摄影机-扫描摄影机
缝隙式(或航带摄影机)和镜头转动式摄影机。
➢不是一幅一幅地曝光,而是连续曝光,不需快门。
➢为了得到清晰的影像必须满足:
f
WP Wi W
H
➢缺点?
编辑版pppt
分辨率较高的感光片);
摄影技术(包括曝光量的选择、感光片的冲洗以及印
像、放大技术)。
编辑版pppt
44
航空像片的分辨率
是衡量胶片分辨地物细部能力的一种指标。
用单位距离内能分辨的线宽与间隔相等的平行细
线的数目来表示。
主要取决于航摄相机的镜头分辨率和感光乳剂的
分辨率。但景物的反差、大气的光学条件、飞机
扫描成像过程当旋转棱镜旋转时第一个镜面对地面横越航线方向扫视一次在扫描视场内的地面辐射能由幅的一边到另一边依次进入传感器经探测器输出视频信号再经电子放大器放大和调制在阴极射线管上显示出一条相应于地面扫描视场内的景物的图像线这条图像线经曝光后在底片上记录下来
第三章遥感成像原理与遥感图像
特征
讲授教师:张彦丽
30
编辑版pppt
31
微波遥感图像特征PPT课件
1m
43
不 同 空 间 分 辨 率 的 图 像
44
1米
10米
30米
分辨率越高,目 标越清楚
45
一.遥感图像的空间分辨率
一般而言:遥感系统的空间分辨率越高,其识别物体的能力 越强。 实际上:每一目标在图像上的可分辨程度,不完全决定于空 间分辨率的具体值,和它的形状、大小,以及它与周围物体 亮度、结构的反差。 经验证明:遥感器空间分辨率的选择,一般应选择小于被探 测目标最小直径的1/2。
强回波
24
二.微波遥感方式和传感器
3)波长 波长越短反射能力越强。
ERS-1 C-band
JERS-1 L-band
25
二.微波遥感方式和传感器
4)极化方式: 极化:表示电磁波电场振动方向的变化。
水平极化:电场振动 方向平行于水平面 (“H”极化) 垂直极化:电场振动 方向垂直于水平面 (“V”极化)
长评估
16
二.微波遥感方式和传感器
1.主动微波遥感 微波主动遥感:微波散射计,雷达高度计,雷达 (1)雷达 雷达(Radar – Radio Detection and Ranging)
意为无线电波探测物体并测定物体距离。 应用波段:微波(主要),红外,激光; 类型:非成像雷达,
成像雷达
17
二.微波遥感方式和传感器
• 岩石的介电常数差别很小;
• 金属物体有很大导电率,介电常数很大,故雷达回波
信号也很强;
23
二.微波遥感方式和传感器
2)地表粗糙度对回波强度有明显影响。
地表粗糙度(H)往往是相对波长(λ)而 言的。 H<< λ 光滑表面;H >> λ 粗糙表面
地 物
43
不 同 空 间 分 辨 率 的 图 像
44
1米
10米
30米
分辨率越高,目 标越清楚
45
一.遥感图像的空间分辨率
一般而言:遥感系统的空间分辨率越高,其识别物体的能力 越强。 实际上:每一目标在图像上的可分辨程度,不完全决定于空 间分辨率的具体值,和它的形状、大小,以及它与周围物体 亮度、结构的反差。 经验证明:遥感器空间分辨率的选择,一般应选择小于被探 测目标最小直径的1/2。
强回波
24
二.微波遥感方式和传感器
3)波长 波长越短反射能力越强。
ERS-1 C-band
JERS-1 L-band
25
二.微波遥感方式和传感器
4)极化方式: 极化:表示电磁波电场振动方向的变化。
水平极化:电场振动 方向平行于水平面 (“H”极化) 垂直极化:电场振动 方向垂直于水平面 (“V”极化)
长评估
16
二.微波遥感方式和传感器
1.主动微波遥感 微波主动遥感:微波散射计,雷达高度计,雷达 (1)雷达 雷达(Radar – Radio Detection and Ranging)
意为无线电波探测物体并测定物体距离。 应用波段:微波(主要),红外,激光; 类型:非成像雷达,
成像雷达
17
二.微波遥感方式和传感器
• 岩石的介电常数差别很小;
• 金属物体有很大导电率,介电常数很大,故雷达回波
信号也很强;
23
二.微波遥感方式和传感器
2)地表粗糙度对回波强度有明显影响。
地表粗糙度(H)往往是相对波长(λ)而 言的。 H<< λ 光滑表面;H >> λ 粗糙表面
地 物
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
卫星轨道倾角很大,绕过极地地区,也称极轨卫星。 在太阳同步轨道上,卫星于同一纬度的地点,每天在同一
地方时同一方向通过。
18
赤道
太阳同步卫星,轨道近似穿越极地, 通过地球上同一点上空的时间一致。
19
二、地球静止卫星轨道
(Geosynchronous satellite orbit ) 卫星运行周期与地球自转周期(23小时56分4秒)相同的 轨道称为地球同步卫星轨道(简称同步轨道)。
升高时由赤道平面反时针旋转到轨道平面的夹角。
当0<i<90时,卫星运动方向与地球自转方向一致,因此叫“正方向 卫星”;
当90<i<180时,叫“反方向卫星”,即卫星运动与地球自转方向相 反;
当i=90时,卫星绕过两极运行,叫“极轨”或“两极”卫星; 当i=0或180时,卫星绕赤道上空运行,叫“赤道卫星”。
16
3.1.3 卫星轨道及特点
• 近圆形轨道 • 近极地轨道 • 太阳同步轨道 • 可重复轨道
人造卫星的运动轨道取决于卫星的任务要求,区分为低轨道、中高轨道、地球 同步轨道、地球静止轨道、太阳同步轨道,大椭圆轨道和极轨道。人造卫星绕 地球飞行的速度快,低轨道和中高轨道卫星一天可绕地球飞行几圈到十几圈, 不受领土、领空和地理条件限制,视野广阔。能迅速与地面进行信息交换、包 括地面信息的转发,也可获取地球的大量遥感信息,一张地球资源卫星图片所 遥感的面积可达几万平方千米。
14
(4)椭圆半长轴(A) 近地点和远地点连线的一半,它标志卫星轨道的大小。 它确定了卫星距地面的高度,按照卫星高度的不同又将卫星
分为低轨卫星(150—300公里)、中轨卫星(约1000公里左率(e)
椭圆轨道两个焦点间距离之半与半长轴的比值,用以表示轨 道的形状。 (6)卫星过近地点时刻(T)
区域同时收入视野,应用于气象和通讯领域。
20
地球同步卫星,相对静止在赤道某一点上空。
21
3.1.4 遥感卫星系列
一、 气象卫星
•赤道坐标系 赤道坐标系是取赤道面为基准 面,以地球自转轴、以及从地 心指向春分点的直线为坐标轴 所构成的坐标系。虽然由于地 轴的运动,该坐标系相对于恒 星其位置是变动的,但是,对 于轨道寿命有限的卫星运动来 说,影响很小。
开普勒的轨道参数
12
五、开普勒的6个参数
(1)轨道倾角 轨道平面与地球赤道平面的夹角。具体计算是在卫星轨道
以近地点为基准表示轨道面内卫星位置的量。
15
六、其它常用遥感卫星参数
卫星高度:卫星距离地面的高程。
T2 H3 R
C
运行周期:卫星绕地球一圈所需的时间。 重复周期:卫星从某地上空开始运行,经过若干时间的运行 后,回到该地上空时所需的天数。 降交点时刻:卫星经过降交点时的地方太阳时的平均值。 扫描宽度:传感器所观测的地面带的横向宽度。
➢ 在无数条同步轨道中,有一条圆形轨道,它的轨道平面与 地球赤道平面重合,在这个轨道上的所有卫星,从地面上 看都像是悬在赤道上空静止不动,这样的卫星称为地球静 止轨道卫星,简称静止卫星, 这条轨道就称为地球静止卫 星轨道, 简称静止卫星轨道, 高度大约是35800公里。
➢ 人们通常简称的同步轨道卫星一般指的是静止卫星。 ➢ 能够长时间观测特定地区,卫星高度高,能将大范围的
航天平台 150km以上, 卫星、宇宙飞船。
航空平台 百米至十余千米,低、中、高空飞机以及飞船、气球等。
地面平台 0—50m, 车、船、塔等。
5
6
3.1.2 卫星的轨道参数
卫星在空间运行,遵循天体运动的开普勒三定律。
一、开普勒第一定律
星体绕地球(或者太阳)运动的轨道是一个椭圆,地球(太 阳)位于椭圆的一个焦点上。
第三章 遥感成像原理与遥感图像特征
2011年2月
1
第一部分
整体概述
THE FIRST PART OF THE OVERALL OVERVIEW, PLEASE SUMMARIZE THE CONTENT
2
本章主要内容:
遥感成像原理、遥感图像特征,包括摄影成像、扫描成像、微波 成像等机理及图像特征。
13
(2)升交点赤经(h)
卫星由南向北运行时经过赤道平面的那一点,叫“升交点” ; 该点离春分点的经度值就是升交点赤经。
轨道倾角和升交点赤经共同决定卫星轨道平面的空间位置。
(3)近地点幅角(g)
地心与升交点连线和地心与近地点连线之间的夹角。由于入轨 后其升交点和近地点是相对稳定的,所以近地点幅角通常是不变 的,它可以决定轨道在轨道平面内的方位。
vp
ra a
v远a 地点
Major axis
Minor axis
10
三、开普勒第三定律
行星的公转周期的平方与它的轨道平均半径的立方成正比。 卫星绕地球的运行周期的平方与它的轨道平均半径的立方成 正比。
T2/(R+H)3=C T:运行周期;R:地球半径;H:离地高度;C:开普勒常 数
11
四、卫星的轨道参数
轨道离地最近的点称近地点,反之为远地点。
7
开普勒定律(1)
近日点
b
太阳
远日点
c
a
地球轨道
8
二、开普勒第二定律
从地心或者太阳中心到星体的连线(星体向径),在单位 时间扫过的面积相等(面积速度守恒)。
卫星在离地近的地方经过时的速度要快些,在离地远的地 方运行的速度要慢些。
9
开普勒定律(2)
近地点
Rp
17
一、太阳同步轨道
( sun-synchronous satellite orbit ) 卫星的轨道面以与地球的公转方向相同方向而同时旋转的 近圆形轨道。
卫星的轨道平面与赤道平面的夹角一般是不会变的, 但会 绕地球自转轴旋转。
轨道平面绕地球自转轴旋转的方向与地球公转的方向相同 ,旋转的角速度等于地球公转的平均角速度, 即0.9856度 /日或360度/年, 这样的轨道称为太阳同步轨道。
3.1 遥感平台 3.2 摄影成像 3.3 扫描成像 3.4 微波遥感与成像* 3.5 遥感图像的特征
3
3.1 遥感平台
3.1.1 遥感平台的种类 3.1.2 卫星的轨道参数 3.1.3 陆地卫星轨道特点 3.1.4 遥感卫星系列
4
3.1.1 遥感平台
遥感平台(platform)是搭载传感器的工具。 根据运载工具的类型划分:
地方时同一方向通过。
18
赤道
太阳同步卫星,轨道近似穿越极地, 通过地球上同一点上空的时间一致。
19
二、地球静止卫星轨道
(Geosynchronous satellite orbit ) 卫星运行周期与地球自转周期(23小时56分4秒)相同的 轨道称为地球同步卫星轨道(简称同步轨道)。
升高时由赤道平面反时针旋转到轨道平面的夹角。
当0<i<90时,卫星运动方向与地球自转方向一致,因此叫“正方向 卫星”;
当90<i<180时,叫“反方向卫星”,即卫星运动与地球自转方向相 反;
当i=90时,卫星绕过两极运行,叫“极轨”或“两极”卫星; 当i=0或180时,卫星绕赤道上空运行,叫“赤道卫星”。
16
3.1.3 卫星轨道及特点
• 近圆形轨道 • 近极地轨道 • 太阳同步轨道 • 可重复轨道
人造卫星的运动轨道取决于卫星的任务要求,区分为低轨道、中高轨道、地球 同步轨道、地球静止轨道、太阳同步轨道,大椭圆轨道和极轨道。人造卫星绕 地球飞行的速度快,低轨道和中高轨道卫星一天可绕地球飞行几圈到十几圈, 不受领土、领空和地理条件限制,视野广阔。能迅速与地面进行信息交换、包 括地面信息的转发,也可获取地球的大量遥感信息,一张地球资源卫星图片所 遥感的面积可达几万平方千米。
14
(4)椭圆半长轴(A) 近地点和远地点连线的一半,它标志卫星轨道的大小。 它确定了卫星距地面的高度,按照卫星高度的不同又将卫星
分为低轨卫星(150—300公里)、中轨卫星(约1000公里左率(e)
椭圆轨道两个焦点间距离之半与半长轴的比值,用以表示轨 道的形状。 (6)卫星过近地点时刻(T)
区域同时收入视野,应用于气象和通讯领域。
20
地球同步卫星,相对静止在赤道某一点上空。
21
3.1.4 遥感卫星系列
一、 气象卫星
•赤道坐标系 赤道坐标系是取赤道面为基准 面,以地球自转轴、以及从地 心指向春分点的直线为坐标轴 所构成的坐标系。虽然由于地 轴的运动,该坐标系相对于恒 星其位置是变动的,但是,对 于轨道寿命有限的卫星运动来 说,影响很小。
开普勒的轨道参数
12
五、开普勒的6个参数
(1)轨道倾角 轨道平面与地球赤道平面的夹角。具体计算是在卫星轨道
以近地点为基准表示轨道面内卫星位置的量。
15
六、其它常用遥感卫星参数
卫星高度:卫星距离地面的高程。
T2 H3 R
C
运行周期:卫星绕地球一圈所需的时间。 重复周期:卫星从某地上空开始运行,经过若干时间的运行 后,回到该地上空时所需的天数。 降交点时刻:卫星经过降交点时的地方太阳时的平均值。 扫描宽度:传感器所观测的地面带的横向宽度。
➢ 在无数条同步轨道中,有一条圆形轨道,它的轨道平面与 地球赤道平面重合,在这个轨道上的所有卫星,从地面上 看都像是悬在赤道上空静止不动,这样的卫星称为地球静 止轨道卫星,简称静止卫星, 这条轨道就称为地球静止卫 星轨道, 简称静止卫星轨道, 高度大约是35800公里。
➢ 人们通常简称的同步轨道卫星一般指的是静止卫星。 ➢ 能够长时间观测特定地区,卫星高度高,能将大范围的
航天平台 150km以上, 卫星、宇宙飞船。
航空平台 百米至十余千米,低、中、高空飞机以及飞船、气球等。
地面平台 0—50m, 车、船、塔等。
5
6
3.1.2 卫星的轨道参数
卫星在空间运行,遵循天体运动的开普勒三定律。
一、开普勒第一定律
星体绕地球(或者太阳)运动的轨道是一个椭圆,地球(太 阳)位于椭圆的一个焦点上。
第三章 遥感成像原理与遥感图像特征
2011年2月
1
第一部分
整体概述
THE FIRST PART OF THE OVERALL OVERVIEW, PLEASE SUMMARIZE THE CONTENT
2
本章主要内容:
遥感成像原理、遥感图像特征,包括摄影成像、扫描成像、微波 成像等机理及图像特征。
13
(2)升交点赤经(h)
卫星由南向北运行时经过赤道平面的那一点,叫“升交点” ; 该点离春分点的经度值就是升交点赤经。
轨道倾角和升交点赤经共同决定卫星轨道平面的空间位置。
(3)近地点幅角(g)
地心与升交点连线和地心与近地点连线之间的夹角。由于入轨 后其升交点和近地点是相对稳定的,所以近地点幅角通常是不变 的,它可以决定轨道在轨道平面内的方位。
vp
ra a
v远a 地点
Major axis
Minor axis
10
三、开普勒第三定律
行星的公转周期的平方与它的轨道平均半径的立方成正比。 卫星绕地球的运行周期的平方与它的轨道平均半径的立方成 正比。
T2/(R+H)3=C T:运行周期;R:地球半径;H:离地高度;C:开普勒常 数
11
四、卫星的轨道参数
轨道离地最近的点称近地点,反之为远地点。
7
开普勒定律(1)
近日点
b
太阳
远日点
c
a
地球轨道
8
二、开普勒第二定律
从地心或者太阳中心到星体的连线(星体向径),在单位 时间扫过的面积相等(面积速度守恒)。
卫星在离地近的地方经过时的速度要快些,在离地远的地 方运行的速度要慢些。
9
开普勒定律(2)
近地点
Rp
17
一、太阳同步轨道
( sun-synchronous satellite orbit ) 卫星的轨道面以与地球的公转方向相同方向而同时旋转的 近圆形轨道。
卫星的轨道平面与赤道平面的夹角一般是不会变的, 但会 绕地球自转轴旋转。
轨道平面绕地球自转轴旋转的方向与地球公转的方向相同 ,旋转的角速度等于地球公转的平均角速度, 即0.9856度 /日或360度/年, 这样的轨道称为太阳同步轨道。
3.1 遥感平台 3.2 摄影成像 3.3 扫描成像 3.4 微波遥感与成像* 3.5 遥感图像的特征
3
3.1 遥感平台
3.1.1 遥感平台的种类 3.1.2 卫星的轨道参数 3.1.3 陆地卫星轨道特点 3.1.4 遥感卫星系列
4
3.1.1 遥感平台
遥感平台(platform)是搭载传感器的工具。 根据运载工具的类型划分: