基于STM32在喷绘机喷头控制系统的设计与实现
基于STM32的智能淋浴系统设计
基于STM32的智能淋浴系统设计作者:汪思嘉汪思翔李昊育杨欢来源:《物联网技术》2019年第07期摘 要:现有的淋浴系统智能化程度普遍不高,在节水设计方面的开发也是微乎其微。
為了解决这样的问题,使淋浴系统更加适合快速发展的时代,在此设计开发了具有节水理念的智能淋浴系统。
将STM32处理器、DS18B20水温传感器、红外人体感应探头、红外人体体温传感器、舵机混水阀搭载于现有淋浴之上,可检测人体体温,根据季节自动设置最佳水温,自动感应淋浴下是否有人,通过PID 算法精准控温,OLED 显示屏上实时显示水温。
选择全自动感应模式后,5 s 后达到预设温度的热水流出,可做到人走水断。
淋浴底座装有废水回收装置,处理后的废水可正常用于马桶冲洗、拖地等。
结果表明该系统应用后节水效果显著,并且易于推广。
关键词:智能淋浴;STM32;多传感器协作;舵机控温;节水;PID算法中图分类号:TP277 文献标识码:A 文章编号:2095-1302(2019)07-00-040 引言随着科学技术的快速普及,人们生活向智能化方向发展,但能源的消耗不容小觑。
一方面生活要更加便捷,另一方面能源要更加节约,这样才能真实推动我国可持续发展战略的深入实施[1]。
淋浴作为家家户户必不可少的生活设施,不论是在生活还是在能源利用方面都占有相当的分量。
现有的淋浴操作方式普遍较为传统,且水温控制十分不便,热冷水的交融比例不宜把控,给洗浴带来诸多不便[2]。
另外,几乎所有的洗浴设施都将洗浴所用的废水直通下水道,很少二次利用,这就使得生活用水的利用程度不高,致使资源浪费。
利用微型控制器将多传感器复合,以用于淋浴系统,并增添废水回收装置,可解决上述问题。
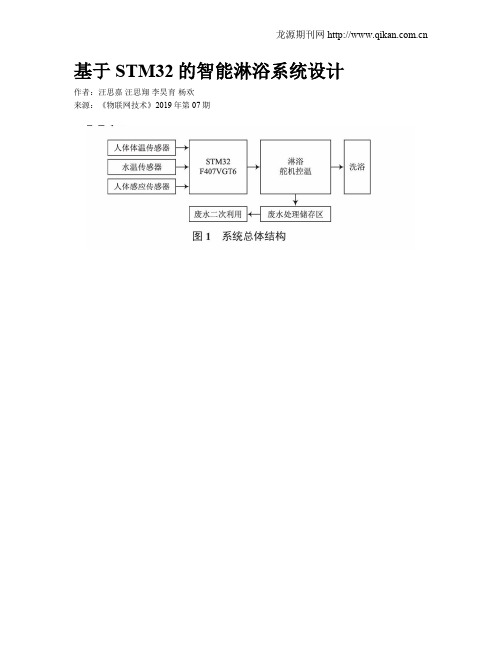
1 系统总体设计为了解决现有淋浴系统面临的问题,本文设计一种基于STM32微型控制器的智能淋浴系统。
系统总体结构如图1所示,包括装载于淋浴上的STM32F407VGT6处理器、红外人体体温传感器、DS18B20水温传感器、红外人体感应探头、混水阀及电源等模块。
基于PID算法在喷绘机小车控制系统的应用
基于PID算法在喷绘机小车控制系统的应用刘晋;苏臣;金禹含;步亚男【摘要】选取STM32系列的STM32F103RBT6作为主控系统,以L6203作为直流电机的驱动;根据小车的位置通过PID算法调节小车的速度,对主控中高级定时器进行设计,通过UART显示数据;观测小车运行过程中能否消除惯性带来的影响并立刻转向,及PID算法是否可以应用在喷绘机小车的控制系统中.经过理论分析和软硬件结合测试表明,该设计不但解决了直流电机中由于惯性大难以刹车的问题,并验证了PID算法在喷绘机控制系统中的可行性和实用性.【期刊名称】《微型机与应用》【年(卷),期】2015(034)008【总页数】4页(P97-100)【关键词】STM32;L6203;PID算法;喷绘机【作者】刘晋;苏臣;金禹含;步亚男【作者单位】辽宁师范大学计算机与信息技术学院,辽宁大连116081;辽宁师范大学计算机与信息技术学院,辽宁大连116081;辽宁师范大学计算机与信息技术学院,辽宁大连116081;辽宁师范大学计算机与信息技术学院,辽宁大连116081【正文语种】中文【中图分类】TP368喷墨式喷绘机为保证喷绘出图像精准细腻,小车上的喷头每行扫描过程中按需进行喷墨,但是来自小车的平稳性以及在改变方向时小车的运动状态,直接影响喷头墨滴喷出的位置。
如何在保证小车平稳运行前提下,根据提供的信号改变小车的运行状态值得深入研究和探讨。
携带喷头的小车在喷绘轨道上来回运动,在需要的位置上(即像素点)喷头进行喷墨。
主控发控制信号给电机驱动模块来控制电机,从而控制小车的方向和位置。
电机可以是步进电机、位置控制方式的伺服电机和直流电机。
步进电机启动力矩大,易于精确控制位置,但很难达到高速,实际应用中使用较少。
位置控制方式的伺服电机不但具有步进电机的优点,而且内置的控制器具有电子齿轮易改传动比,实际应用中采用较多,但此电机非常昂贵,从实际的成本出发不易选用。
综合考虑,采用成本较低的普通直流电机,通过调整驱动电压调整速度,但直流电机不能精确定位,必须为其配备精密的位置检测机构以及伺服控制机构才能实现较精确的定位。
基于计算机平台的多喷头喷绘机控制系统的设计与实现
( o p tra d Ifr t n T c n l y C l g ,La nn o a U ies y a a 1 0 1 C ia C m ue n no mai e h o g o e e i ig N r l nvri ,D l n 1 6 8 , hn ) o o l o m t i
A src : I re o m e te m re dmad fra nw gn rt n o ike pitr hs pp r pee t ef ds n d b t t n odr t et h ak t e n o e e ea o f n jt r e,ti ae rsns sl— ei e a i n a g
cmp t - ae l f m frhg — pe ag —om tf lcl njtmut n z e cnrlss m i pe e t i fporm , nr— o ue bsd pao o i sed l e fr a u oo ike r tr h r l r l - oz ot yt m l n t n o rga s it i l o e m ao o
Ke y wor s: c nr l s se ; l — o ze p ne l a t s u r t o T—V u v d o to y t m mu t n zl r tr;e s — q a e meh d: i i c r e
随 着 大 型 喷 绘 机 应 用 领 域 的 拓 展 与 普 及 , 会 对 喷 社 绘 产 品 的 需 求 量 与 日俱 增 , 时 人 们 对 喷 绘 产 品 质 量 的 同
台 的 大 幅 面 高 速 度 多 喷 头 彩 色 喷 绘 机 控 制 系 统 的 实现 方 案 , 介 绍 了控 制 系 统 的 设 计 思 想 以 及 各 控 制 子 模 块 之 间 的 层 次 结 构 和 逻 辑 关 系 , 入 讨 论 了 在 系 统 实现 过 程 中遇 到 的 几 个 典 型 问题 , 针 对 这 些 深 并
基于STM32喷淋阀检验测试系统的设计
基于STM32喷淋阀检验测试系统的设计刘洪涛【期刊名称】《齐齐哈尔大学学报(自然科学版)》【年(卷),期】2015(000)001【摘要】This paper introduced a low-power-consumption and high-performance sprinkler valve detecting system based on STM32, and expatiated on its basic framework and the operational principle. STM32’s abundant function modules helped the system to realize multi-channel synchronous analogue-to-digital conversions and the RS485 remote communication base on MODBUS protocol,whose PWM output and high-performance computing contributed to realize the closed-loop control of blower nozzle temperature .Based on LABVIEW , the real-time transfer and printing of detecting date were on used. The practical operation attested for the improved real-time performance and reliability of the system which was of low cost and friendly human-computer interaction.%介绍了一种基于STM32的低功耗,高性能的喷淋阀检测系统,描述了该系统的基本框架结构和工作原理。
基于计算机平台的多喷头喷绘机控制系统的设计与实现

基于计算机平台的多喷头喷绘机控制系统的设计与实现张秋风;刘晋【摘要】为了满足市场对新一代高速高精度喷绘机的需求,提出了一套自行设计的基于计算机平台的大幅面高速度多喷头彩色喷绘机控制系统的实现方案,介绍了控制系统的设计思想以及各控制子模块之间的层次结构和逻辑关系,深入讨论了在系统实现过程中遇到的几个典型问题,并针对这些问题给出了具体的解决方案.经研究测试,该系统能够实现高速喷绘全彩色高清晰画面,目前处于业界领先水平.【期刊名称】《微型机与应用》【年(卷),期】2010(029)024【总页数】3页(P93-95)【关键词】控制系统;多喷头喷绘机;最小二乘法;T-V曲线【作者】张秋风;刘晋【作者单位】辽宁师范大学,计算机与信息技术学院,辽宁,大连,116081;辽宁师范大学,计算机与信息技术学院,辽宁,大连,116081【正文语种】中文【中图分类】TP273随着大型喷绘机应用领域的拓展与普及,社会对喷绘产品的需求量与日俱增,同时人们对喷绘产品质量的要求也越来越高。
优良的喷绘机系统设计和喷绘机喷头性能高低是决定喷绘产品的质量和喷绘机喷绘速度的关键,本实验室引进一种新型高DPI工业用压电喷头,研制出一种新型高速多喷头彩色喷绘机。
该机器与国内外市场现有机器相比,具有高速度、高质量、高分辨率、适用于多种喷绘材质等优势,特别是对大幅面纺织品的印染优势明显。
本文介绍了机器的总体设计,主要讨论在设计控制系统[1-4]的软硬件过程中遇到的一些问题,并针对这些问题给出了较优的解决方案。
1 控制系统硬件设计本系统可以由一台PC机控制下运行,采用新一代工业用压电喷绘机喷头,每喷头510孔,180 dpi,为了提高喷绘速度,采用分组喷头,每组6色或者8色,共3~6组可选,支持打印1~4灰度等级的墨滴,垂直运动采用仿步进电机的开环控制伺服电机,能实现 1、2、4、8 pass的打印。
因此,本喷绘系统采用独立的运动控制板和可组合的数据传输板以及各喷头独立的喷头控制板结构,方便调试、运输和部件更换,整体设计图如图1所示。
(完整版)基于单片机的智能微喷灌控制系统毕业设计论文
基于单片机的智能微喷灌控制系统设计摘要随着科学技术的日益发展,特别是智能技术的发展,智能化的微灌溉技术应用范围越来越广泛。
智能化的微灌系统可以实现大面积的作物田间灌溉,在很大的程度上节约人力、物力,实现作物生长大面积的管理,实时掌握作物的生长环境。
开发简单、快速、实用的微灌智能设计具有重要的意义。
此次设计的是通过选择SHT11温湿度传感器对土壤的温度以及湿度等重要物理量进行采集,将采集到的信号交给51单片机系统进行处理,通过用c语言的编程实现在需要时驱动相关外部设备,对目标区域进行自动精确地智能灌溉。
关键词:51单片机温湿度传感器 c语言AbstractWith the increasing development of science and technology,especially the development of Intelligent Technology,the application range of intelligent micro-irrigation technology more widely.The intelligent micro-irrigation systems can achieve a large area of crop field irrigation,and save to a large extent on the manpower,resources,management of the crop area,real-time control environment for the growth of crops.Development of simple,rapid,practical micro-irrigation intelligent design is of great significance.The design is by SHT11 temperature and the soil temperature and ,the collected signal to the 51 single-chip system for processing,related to an external device driver when needed by using c language programming achieve automatic precision smart irrigation,the target area.Key words: 51MCU temperature and (S6)、Enter(S7)、sd(S3))和温度相对湿度转换键kk(P2^3)。
基于单片机的喷墨制版机供墨控制系统设计

基于单片机的喷墨制版机供墨控制系统设计喷墨制版机是现代印刷行业中一种常见的设备,它可以将原始设计图案以墨水形式喷射到纸张或者其他材料上,同时还可以通过组合不同颜色的墨水来实现多彩的印刷效果。
然而,想要让喷墨制版机正常进行工作,供墨控制系统是非常重要的一环。
本篇文章将重点介绍一种基于单片机的喷墨制版机供墨控制系统设计。
一、系统框架基于单片机设计的喷墨制版机供墨控制系统要求能够监控各个喷头的供墨状态,并且能够准确地控制墨水的输出。
为此,我们设计的系统框架包括以下几个部分:1. 接口模块接口模块和上位机进行数据通讯,负责接收来自上位机的控制指令,并将相关参数传递给单片机主控模块。
2. 主控模块主控模块是系统的核心部分,它主要负责解析上位机发送来的指令,控制适当的驱动器,根据墨水喷射需求来开始或停止墨水喷射。
同时,主控模块还需要实时监测墨水的供应状态,并在供墨不足时发出警报,提醒用户及时添加墨水。
3. 驱动器模块驱动器模块主要负责输出相关的电气信号,控制喷头的开关状态。
在单片机主控的指令下,驱动器模块能够准确地配合喷头运行,确保墨水输出的稳定和高效。
二、系统实现为了实现基于单片机的喷墨制版机供墨控制系统,我们借助了STM32F103单片机进行开发。
具体实现方法如下:1. 接口模块的实现我们选择了基于串口通讯的方式来与上位机进行数据交互,采用UART通讯协议来实现数据的稳定传输。
通过配置串口通讯参数,我们能够保证数据的准确传输和高效处理。
2. 主控模块的实现主控模块主要运用了单片机中的GPIO口进行喷头的控制。
通过编写控制逻辑,我们能够准确地控制每个喷头的工作状态,并且能够及时检测墨水的供应状态。
当墨水不足时,系统会发出警报提示用户及时补充墨水。
3. 驱动器模块的实现在驱动器模块中,我们采用了高性能的MOS管进行控制。
MOS管能够快速开关,有效地保证了喷头的响应速度。
另外,我们还采用了反向保护电路,避免因为驱动电路的问题而损坏喷头。
基于STM32的三喷头彩色3D打印机系统设计
ISSN 1002-4956 C N H-2034/T实验技术与管理Experim ental Technology and Management第34卷第11期2017年11月V ol.34 No. 11 Nov. 2017DOI :10. 16791 / .cnki.sjg.201 7. 11.026基于S T M32的三喷头彩色3D打印机系统设计丁承君,赵泽羽,尹雷鹏(河北工业大学机械工程学院,天津 300130)摘要:针对目前3D打印机控制系统中存在的处理速度慢、电路复杂、打印质量不高、断电重新打印等缺点,设计了一款基于S T M32的彩色3D打印机的控制系统,该方案实现了上位机通信、数据处理、信号控制、断电续打、彩色打印等功能,选用D R V8825步进电机驱动器实现了对步进电机的细分驱动;吏用P I D调节的方式调节加热床的温度。
重点论述了控制系统的主要硬件电路设计和软件实现流程。
系统表现良好且能缩短大量打印时间。
关键词:3D打印机;S T M32;断电续打;P I D调节中图分类号:T P334 8 文献标识码:A 文章编号:1002-4956(2017) 1 1-0106-08Design of three-nozzles 3D color printer system based on STM32D i n g C h e n g j u n,Z h a o Z e y u,Yi n Leipeng(College of Mechanical Engineering,Hcbri University of Technology,T'i a n j i n 300130,China.)Ab str a c t:I n view of the shortcomings of the current3D printer control system such as slow p complex circuit,rather poor printing quality,re-printing because of power failure,etc. ,a control system o fthe3D color printer b ased on S T M32i s designed.This scheme r e a l i z e s the functions such as the uppercomputer communication,data processing,signal control,continuous printing after power failure,colorprinting,etc.The D R V8825 stepping motor driver i s adopted to achieve the subdivision motor,and the temperature of the heating bed i s adjusted by means of the PID regulation.T hemain hardwarec i r c u i t design and the software flow chart of the control system are discussed.T'he system p shortens the printing time.K e y wo r d s:3D printer;S T M32; continuous printing after power failure;PID regulation3D打印技术又叫快速成型技术[13],作为一门新型的技术已被应用在各行各业,大到航空航天,小到生 物医学方面都有3D打印的影子。
基于STM32的外墙喷洗清洁机设计
第13卷㊀第7期Vol.13No.7㊀㊀智㊀能㊀计㊀算㊀机㊀与㊀应㊀用IntelligentComputerandApplications㊀㊀2023年7月㊀Jul.2023㊀㊀㊀㊀㊀㊀文章编号:2095-2163(2023)07-0094-05中图分类号:TP242.3文献标志码:A基于STM32的外墙喷洗清洁机设计王胜蓝,叶邦松,袁㊀方,侯飞宇,汤志仁,江鸿博(上海工程技术大学机械与汽车工程学院,上海201620)摘㊀要:随着机器人技术的发展,高成本㊁高风险的人工清洁方式已经逐步被清洁机器人所代替,本文设计了一款基于STM32单片机的气㊁水两相外墙喷洗清洁机,该外墙喷洗机包括楼顶供给系统㊁升降装置㊁外墙喷洗平台以及楼低配重小车㊂楼顶供给系统及时供给空中喷洗平台水㊁气与清洁液,以卷扬机作为升降装置动力控制空中平台立面清洁,以摇臂机构㊁喷洗机构㊁视频监控为主要部分组成非接触式清洁喷洗平台,能够及时辨别窗面上污物,反馈到楼底操作员,利用遥控器着重进行射流清洁,经过样机封装与外场实验,喷洗平台测试清洁效果良好,值得为智能外墙清洗行业做进一步普及推广㊂关键词:外墙喷洗机;升降装置;立面清洁;摇臂机构;射流清洁DesignofexteriorwallspraycleaningmachinebasedonSTM32WANGShenglan,YEBangsong,YUANFang,HOUFeiyu,TANGZhiren,JIANGHongbo(SchoolofMechanicalandAutomotiveEngineering,ShanghaiUniversityofEngineeringScience,Shanghai201620,China)ʌAbstractɔWiththedevelopmentofrobottechnology,high-costandhigh-riskmanualcleaningmethodshavebeengraduallyreplacedbycleaningrobots.Inthisstudy,agasandwatertwo-phaseexternalwallspraywashingandcleaningmachinebasedonSTM32isdesigned.Theexternalwallspraywashingmachineincludesroofsupplysystem,liftingdevice,externalwallspraywashingplatformandbuildinglowcounterweightcar.Theroofsupplysystemprovidesairsprayplatformwater,gasandcleaningliquidintime.Inthedesign,thehoististakenastheliftingdevicepowertocontrolairplatformfacadecleaning,andthenon-contactcleaningplatformiscomposedofrockerarmmechanism,spraywashingmechanismandvideomonitoring.Thedirtcouldbeidentifiedonthewindowsurfaceintimeandreportedbacktotheoperatorbelow,thereforetheremotecontrolisusedtofocusonjetcleaning.Afterprototypepackagingandfieldexperiment,thespraycleaningplatformtestcleaningeffectisgood,worthyoffurtherpopularizationandpromotionfortheintelligentexteriorwallcleaningindustry.ʌKeywordsɔspraywashingmachine;liftinggear;facadecleaning;rockermechanism;jetcleaning作者简介:王胜蓝(1998-),男,硕士研究生,主要研究方向:智能清洁机设计㊂通讯作者:王胜蓝㊀㊀Email:1287416737@qq.com收稿日期:2022-06-180㊀引㊀言随着国内经济不断发展,城市化发展迅速,带来了人口的迅速的增长㊂与之相适应,城市中高楼建筑层出不穷,玻璃幕墙作为一种新颖的高端建筑墙体,是如今高层建筑的首选[1],繁重㊁高风险㊁高成本㊁低效的清洁工作成为困扰人们的一大问题㊂目前,高空清洗外墙施工通常有2种方式㊂一种是高空吊篮,另外一种是高空吊绳,需要经过专业施工人员进行作业[2],这无疑会提高了危险几率,长时间外墙作业㊁天气条件变化等均会影响外墙清洗工作㊂因此,为了解决外墙清洁问题,研制一款智能㊁高效㊁轻量㊁安全的外墙喷洗机尤为重要㊂1㊀整体方案设计针对本次高楼外墙工作环境,喷洗机在升降机构的带领下,完成大面积高楼外墙清洗动作,为了简化空中平台㊁减小质量,喷洗平台所需的气路㊁水与清洁液均由平台本体外部提供,提高了喷洗平台工作的稳定性与安全性,为了摆脱高墙障碍物对清洁效果的影响,喷洗平台在清洗作业时实现了非接触式清洁㊂根据喷嘴射流清洁工作原理出发,喷洗机主要包括3个主要部分,即:楼顶部分为升降机构与供给系统㊁电源控制系统,空中清洗部分为喷洗清洁平台与框架㊁软导轨等,楼底包括配重小车㊁远程遥控等㊂此外,为了能及时监测到清洗状况,喷洗机内部安装Copyright ©博看网. All Rights Reserved.小型摄像头,及时观察喷洗机工作状态,通过远程遥控器调整内部摇臂机构摆动幅度㊁水泵与空压机开关等,为了简化整体方案图形,给读者充分理解,整体设计方案如图1所示,基本参数表见表1㊂楼下配重小车空中喷洗平台楼顶供给系统与升降机构高楼外墙清洁图1㊀外墙喷洗机整体清洁方案Fig.1㊀Overallcleaningschemeofexteriorwallspraywasher表1㊀喷洗清洁机基本参数Tab.1㊀Basicparametersofspraycleaningmachine部件个数长/mm宽/mm高/mm质量/kg材质升降装置122001000180042碳钢钢缆1150合金钢喷洗平台150040050020配重小车1100050052030导轨4150尼龙绳2㊀整体结构设计2.1㊀喷洗平台外墙喷洗平台的设计结构如图2所示㊂喷洗机清洁作业时,为了保证喷洗作业过程稳定性与安全性,外墙喷洗平台在外部安装了防撞框架,4根导轨绳引导防撞框架在竖直方向运动,在一定程度上避免了喷洗平台侧倾,喷洗平台主要包括两工作层与电源层,喷洗机在作业时,由上向下进行清洁工作,首先由底层喷嘴喷洗清洁液,清洗液由水㊁酒精㊁乙二醇㊁缓蚀剂及多种表面活性剂组成[3],降低液体冰点,起到防冻作用,然后由上层喷嘴进行气㊁水两相清洁,电源装置在内部供电给摇臂机构,在摇臂机构带动下,扩大清洁面积㊂㊀㊀喷洗平台内部结构如图3所示,第一层为24V㊁2.5AH防水充电电源,所采用锂电池能量密度高㊁输出功率大㊁工作范围宽㊁可随时替换[4],其工作时间可持续10h,内部摇臂机构通过调速器调节其转速,喷洗机可通过无线控制接收指令完成所有设计功能,通过视频传输及时反馈给操作终端,可以在数据异常的情况下及时停机,保证喷洗机作业过程安全[5]㊂第二㊁第三层采用锥形喷嘴清洁,以高速水作用在被清洗物表面上,进而实现清洗作业[6],高压水清洗属于物理清洗,相比于化学清洗,适用范围广㊁清洗速度快㊁易于机械化及自动化[7]㊂清洗液工作层气、水两相工作层内部电源供电图2㊀外墙喷洗平台Fig.2㊀Exteriorwallspraywashingplatform图3㊀喷洗平台部分内部结构Fig.3㊀Internalstructureofspraycleaningplatform㊀㊀为了提高抗风等级,喷洗平台框架设置4根软导轨,空中平台抗风受力图如图4所示㊂由图4可知,利用导轨绳拉力克服横向风力干扰,预紧的软导轨具有一定张力,在不影响机器人自由度的情况下,约束喷洗平台位置[8]㊂软导轨拉力F横向风力f图4㊀空中平台抗风受力图Fig.4㊀Windresistancechartofaerialplatform2.2㊀楼顶升降装置与供给系统2.2.1㊀升降装置卷扬机带动钢丝绳进行上下牵引运动,提高了喷洗平台工作的稳定性㊂升降装置如图5所示㊂升降装置在壁面架设,上下运动依靠卷扬机提供动力,升降机架具有越过高楼女墙上环形避雷针的重要作59第7期王胜蓝,等:基于STM32的外墙喷洗清洁机设计Copyright ©博看网. All Rights Reserved.用,在保证机架强度的情况下,采用40钢材拼接而成,尽量降低机架质量[9],可以根据高楼女墙高度调整机架,机架依靠女墙环形作为导轨在水平方向进行移动,卷扬机钢缆通过升降机构上方三滑轮带动喷洗平台,导轨绳㊁水管㊁风管穿过机架外伸环扣,避免因绳索太多出现打结问题㊂外伸扣件如图6所示㊂图5㊀升降装置Fig.5㊀Liftingdevice图6㊀外伸扣件Fig.6㊀Overhangingcoupler2.2.2㊀气㊁水两路供给系统楼顶供给系统如图7所示㊂由图7可知,喷洗平台在外墙工作需及时供给水㊁气与清洁液,水与清洁液主要根据高压水泵提供,空压机主要为喷嘴提供气体,空压机压力设定为固定值,能够在清洁作业的同时及时吹散残留在外墙上的水珠,外侧清水㊁清洁液与水泵相连并安装溢流阀,保证水供给系统不因压力过高而发生事故㊂空中平台升降机架钢缆12V空压机钢缆电源控制箱水泵风路供给牵引绳12V水路供给卷扬机图7㊀楼顶供给系统Fig.7㊀Roofsupplysystem3㊀远程控制系统为了进一步满足智能化远程控制要求,喷洗平台控制系统采用STM32F103ZET6单片机,STM32F103ZET6是一种嵌入式-微控制器的集成电路,该单片机主频达到72MHz[10],片内Flash容量512kB,SRAM容量64kB,内核规格为32位,电源电压为2.0 3.6V㊂中央控制系统协调控制楼顶升降系统㊁外墙喷洗系统㊁空中监视系统以及地面遥控操作系统,各子系统丰富,控制系统电路如图8所示㊂㊀㊀外墙喷洗平台采用远距离WiFi信号传输视频数据,图9为喷洗平台所用小型摄像头,主要依靠2.4G802.11nWiFi内置天线,内置电池满电续航2.5h,若发生异常情况可及时推送到手机,采用128G储存卡循环储存录像㊂㊀㊀系统技术路线如图10所示㊂空中喷洗平台依靠内置天线发送视频数据传输,在楼底操作人员观察显示器之后,利用遥控发出电信号进行远距离控制,以12V低电压控制220V高电压,抗干扰能力强,覆盖范围广,可调整空中喷洗平台姿态,该遥控通过楼顶控制器,进而控制楼顶升降装置㊁水泵㊁空压机开关启停㊂69智㊀能㊀计㊀算㊀机㊀与㊀应㊀用㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第13卷㊀Copyright ©博看网. All Rights Reserved.显示器S T M 32卷扬机空压机水泵继电器继电器K M 2K M 1R 1R 2K M 2K M 1S 1S 2变频器12V12V 电源转换模块5V 12V继电器摇臂机构喷嘴内置摄像头气阀接收端有效距离300m遥控器电源图8㊀控制系统电路图Fig.8㊀Flowchartofcontrolsystem图9㊀小型摄像头Fig.9㊀Miniaturecamera遥控电信号传输遥控电信号传输Wi F i 信号传输开/关开/关12V图10㊀系统技术路线Fig.10㊀Technicalrouteofthesystem4㊀样机调试与实验为了进一步验证喷洗机清洁方案的可行性与远程控制系统的可靠性,需要对喷洗样机进行实验验证,首先根据三维模型进行样机外形加工,其次进行样机封装与电路调试,图11为喷洗机平台外壳加工㊂图11㊀样机加工Fig.11㊀Prototypeprocessing㊀㊀喷洗平台整机经过内部安装㊁整机封装以及外场试验,进一步验证外墙喷洗机远程控制方案的可行性以及水路㊁气路密闭连接的可靠性,图12为喷洗机外场试验图㊂图12㊀喷洗机样机与外场试验Fig.12㊀Spraywashingmachineprototypeandfieldtest(下转第104页)79第7期王胜蓝,等:基于STM32的外墙喷洗清洁机设计Copyright ©博看网. All Rights Reserved.绘制,如图15所示,芯片版图总面积为1442ˑ1385um,通过DRC检查及LVS验证;图15中,标注A部分为调零运算放大器,B㊁D部分为辅助运算放大器,C部分为时钟电路,E部分为主运算放大器,F部分为基准与振荡器电路,剩下的则为芯片的其他辅助模块㊂图15㊀芯片版图Fig.15㊀Chiplayout4㊀结束语设计了一种低失调㊁零漂移㊁轨到轨运算放大器芯片,工作电压5V,采用数模混合电路实现自动调零功能,输入失调电压<3.6μV,失调电压漂移ɤ0.007μV/ħ,同时具有极佳的电源抑制比㊁共模抑制比和开环电压增益㊂已成功完成电路设计与版图设计,通过DRC检查及LVS验证;整体系统达到预期目标,性能优异㊂该芯片可在温度传感器㊁压力传感器㊁热电偶放大器等精密信号采集领域有着广泛的应用㊂参考文献[1]韩前磊,黄立朝,孔祥艺,等.一种双通道零漂移运算放大器的设计[J].固体电子学研究与进展,2021,41(02):143-148.[2]张佳星.基于自调零技术的轨到轨输出运算放大器研究与设计[D].成都:电子科技大学,2021.[3]肖宇.一种高带宽Ping-pong自调零运算放大器[J].集成电路应用,2019,36(04):41-42.[4]魏廷存.模拟CMOS集成电路设计[M].北京:清华大学出版社,2010.[5]GRAYP,HURSTP,LEWISS,etal.Analysisanddesignofanalogintegratedcircuits[M].NewYork:Wiley,2001.[6]李有慧.一种输入输出轨到轨CMOS运算放大器的设计[J].电子科技,2015,28(06):165-169.[7]王松林,张树春,叶强,等.一种采用改进自调零技术的误差放大器设计[J].复旦学报(自然科学版),2010,49(06):667-673.[8]YUChonggun,GEIGERRL.Anautomaticoffsetcompensationschemewithping-pongcontrolforCMOSoperationalamplifiers[J].IEEEJournalofSolid-stateCircuits,1994,29(5):601-610.[9]OPRISIE,KOVACSGTA.Arail-to-railping-pongop-amp[J].IEEEJournalofSolid-StateCircuits,1996,31(9):1320-1324.[10]TAGHIZADEHA,KOOZEHKANANIZD,SOBHIJ.AModifiedApproachforCMOSAuto-ZeroedOffset-StabilizedOpamp[J].CircuitsandSystems,2013,4(2):193-201.(上接第97页)5㊀结束语高效㊁低廉㊁具有普适性作为外墙喷洗机的特点,充分说明外墙喷洗机针对墙面清洁的重要意义㊂本文基于传统人工清洁方式效果不佳㊁局限性大的难点,研制出一款新型外墙喷洗清洁机,提出了喷洗机整体系统方案,主要对空中喷洗平台㊁楼顶供给系统以及升降越障装置进行了详细介绍,为喷洗机在复杂环境条件下进行外墙清洁奠定了基础㊂通过样机加工与外场实验测试,验证了喷洗机在高楼外墙下的适应能力,进一步间接证明了喷洗机远距离控制的可行性,对高楼外墙清洁机具有借鉴与指导意义㊂参考文献[1]刘晗,刘元昊,陈育羽,等.玻璃幕墙清洁机器人的结构设计[J].机械工程与自动化,2021(01):119-120,123.[2]张大申.玻璃幕墙的清洁与保养[J].清洗世界,2004(04):40-41.[3]张倩,郭学华.玻璃清洗液配方及指标控制研究[J].煤炭与化工,2020,43(02):129-135.[4]周倪敏,刘超峰,刘杰,等.我国智能外墙清洁机器人发展及应用[J].软件导刊,2020,19(06):53-56.[5]贾强.玻璃幕墙清洁机器人的模态分析及优化设计[D].北京:北京理工大学,2016.[6]刘庭成,范晓红,刘焱.高压水射流清洗机喷嘴的结构与参数[J].清洗世界,2010,26(09):32-37,41.[7]陈亮.高压水射流扇形喷嘴内外流场仿真分析[D].兰州:兰州理工大学,2010.[8]周倪敏,刘超峰,张航,等.立面三维可越障清洁机器人系统[J].轻工机械,2021,39(02):12-16,22.[9]KIMT,JEONY,YOOS,etal.Developmentofawall-climbingplatformwithmodularizedwall-cleaningunits[J].AutomationinConstruction,2017,83:1-18.[10]曲曰阳,邹臣锋,范美琪,等.一种玻璃幕墙清洗机的设计[J].集成电路应用,2020,37(12):22-24.401智㊀能㊀计㊀算㊀机㊀与㊀应㊀用㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第13卷㊀Copyright ©博看网. All Rights Reserved.。
基于STM32单片机的感应式互动喷泉设计与应用分析
基于S TM32单片机的感应式互动喷泉设计与应用分析刘卫长沙民政职业技术学院,湖南长沙410004摘要:介绍了以S T M32单片机为控制中心,由声学传感器㊁超声波测距传感器㊁信号处理电路㊁喷泉水泵驱动机构㊁喷泉泵驱动机构和喷水池泵驱动机构组成的互动喷泉系统㊂该系统增强了喷泉与人的互动性,带来了人的参与感,并可感知到人与喷嘴之间的距离,一旦距离太近出现危险,喷泉就会自动停止喷水㊂关键词:S T M32单片机;传感器;P WM;感应喷泉中图分类号:T U9T P368.1;T P212D O I:10.3969/j.i s s n.2097-065X.2023.05.0390引言目前喷泉主要加入了声㊁光㊁电㊁音乐㊁水幕等要素,这些要素都是预先设定好的喷水状态,与人之间缺少互动,同时传统的喷泉缺少距离感应器,一旦靠近喷泉,就有可能造成高压水柱伤害到游客㊂直流喷水喷泉的控制系统包括:恒压控制㊁可控硅可控整流㊁P WM P WM控制㊂恒压控制方式主要是对喷泉的喷水泵直接提供额定电压,使喷水泵处于额定电压下,对喷泉的喷水流量进行控制,达到一常数,这种控制方式虽然简单,但喷头的喷水效果单一,观赏价值较低㊂可控硅可控整流控制技术是利用可控硅可控整流器对喷水泵的电压进行调整,从而使喷水泵的喷水流量得到动态调整,提高了喷水的观赏效果,但由于可控硅整流器可以近似为一次惯性链,所以系统控制存在一定的滞后㊂P WM P WM脉冲宽度调制技术,通过使用MO S F E T等功率开关元件组成P WM脉宽调制,利用P WM VWM技术进行电压的线性调整,从而可以对水泵的流量进行动态调整,其响应速度比可控硅整流法快[1-2]㊂该系统采用P WM P WM脉冲宽度调制技术,在喷泉系统中引入了一个声敏元件和一个距离感应装置,经过信号处理和电路处理后,送至S T M32单片机,实现对喷泉的实时监控和距离的安全性监测㊂1S T M32单片机概述D A Q(D A Q)是从模拟和数字被测量的元件,例如传感器和其他待测试的装置,自动地获取无电或电量的信号,然后发送给计算机进行分析和处理㊂数据采集系统是将测量软件和硬件产品与计算机或其他专门的测试平台相结合,实现用户定制的灵活的测量系统㊂近年来,数据采集技术和应用技术日益引起人们的重视,并在各个行业中快速应用㊂如冶金㊁化工㊁医药㊁电器性能等多种应用中,对多路模拟信号的采集㊁预处理㊁暂存㊁传输到上位机,再由上位机进行分析㊁处理㊁显示信号波形㊁自动报表等㊂但是,目前的许多采集系统功能单一㊁采集通道少㊁采集速率低㊁操作复杂,对操作环境的要求较高㊂在工业控制㊁仪器仪表㊁机电一体化㊁智能家居等方面有广泛的应用前景㊂不管是哪个行业,只要能及时地收集和处理数据,就能提高工作的效率和经济效益㊂数据收集系统主要负责把传感器的模拟信号转化为计算机能够识别的信号,并将其输入计算机,通过计算机进行显示和打印,从而达到对一定物理量的监控㊂由于技术的发展,需要大量的数据采集设备,因此以数据机为核心,组成了一个小型的系统㊂总之,研制高性能㊁可储存的数据采集产品是非常有前途的,随着电子技术的飞速发展,越来越多的高性能电子芯片被推出,为人们在电子系统的设计中增加了更多的选择和便利㊂由于体积小㊁功耗低㊁使用方便㊁处理精度高㊁性价比高,在数据采集系统中,以单片机为核心[3-4]㊂随着越来越多的高性能A/D变换器的问世,使数据采集系统的设计变得更加便捷,其采集精度和速度都得到了极大改善㊂2系统整体设计本系统包括单片机S T M32㊁超声波传感器㊁声音传感器㊁水泵驱动㊁电源模块㊁直流水泵等㊂S TM32单片机为控制单元,完成信号处理㊁逻辑控制㊁命令发布㊁声音传感器㊁超声波测距和处理电路构成音频信号的采集部件,利用音频采集单元将不同幅度的音频信号变换成M C U可接收的电信号,然后,将信号输入到M C U的A D转换器,用A D变换将代表语音幅值的模拟电压信号变换成数字信号0,然后把数字信号的数值输入到M C U P WM发生器的C C R寄存器中,用对应P WM的P WM管脚输㊃121㊃基于S TM32单片机的感应式互动喷泉设计与应用分析 刘卫Copyright©博看网. All Rights Reserved.出对应于声音音量的不同工作比例的P WM波㊂2.1显示模块的选择L E D数码管是一种常见的数字显示装置,又叫八段编码管㊂8个L E D的数字,一共有两种,即共阳极和共阴极㊂共阳极和共阴极一样,都是一头固定,一头是自由的㊂就拿共阳极来说,共阳极就是把阳极固定在一个地方,而阴极却是可以自由地连接在一起的㊂而共阴极则正好相反,它是把阴极固定在一处,这样阳极就能任意与其他线路相连㊂这4个数字管共有8条数据线,每4条数字管都有4个共同的终端,这是用来将数据线与4个数字管相连的㊂通常我们在学习硬件时都会先把L E D灯打开,当然L E D矩阵也可以把数字显示出来,不过这需要很高的编码能力㊂L C D L C D通常是用来显示资料的,这种机型通常是L C D1602,从名称上可以看到,这台显示器可以显示16个比特,也可以显示两条线,在使用L C D1602之前,必须要知道L C D1602管脚的作用[5-6]㊂2.2编程语言的选择在选择编程语言时,首先要考虑的是汇编语言,因为汇编语言是一种最原始的机器语言,需要用不同的指令来完成,这就像是V H D L一样㊂因此,在选择这一设计中的编程语言时,首先要考虑的就是汇编语言,当然第一个排序的编译语言也是如此㊂因此,本文选用C语言为本次设计的主要程序语言㊂3系统硬件设计本系统的硬件部分主要包括单片机㊁超声波传感器㊁水泵驱动㊁直流水泵等㊂声敏元件及超声波测距元件将所测之声及距离以电信号传送至单片机,经单片机处理后,由单片机向水泵驱动装置输出P WM讯号,由水泵驱动装置带动直流水泵,并依声讯与距离讯号,使水泵自动进行喷水或停水㊂3.1单片机系统选型与设计现在市场上使用最广泛的有8-51型㊁32-位型等㊂51微控制器具有成本低㊁工作频率约12M h z㊁芯片资源少㊁不集成A D C㊁P WM等软体;比较典型的32比特微处理器是由意法的S T M32系列,它的工作速度ȡ72M h z,芯片内有大量的外部设备,有A D C㊁P WM㊁I I C㊁S P I等,使用起来非常便利㊂由于这种交互喷水装置的工作要求将音频等模拟信号输入到A D C中进行加工,所以采用意法公司生产的S T M32C8T6芯片为控制器,并按照S T M32C8T6电路的基本电路设计,设计了一个最少的电路,由电源电路㊁复位电路㊁S WD下载电路㊁B O O T电路和晶振电路组成㊂3.2信号采集单元及信号处理电路设计该系统的主要功能是:音频和超声测距,其电路主要有两台电压比较仪及电阻仪,各有一位数字输出及一位模数㊂在听觉的咪表Q1感应到了声音以后,其内部的阻抗性会增加,从分压原理可以看出, R3右边和地面的电压会增加,也就是说,声敏元件模拟量的输出电压会随声响的增加而增加;在此期间,在提高了音量之后,L M393的倒置端的电压也会增加,在它的数值比它的同相位输入电压高的情况下,L M393的输出会产生一个低电位,而在右侧的一个逆变部也会收到一个数值会比同相的输入更高的低压,使右侧的一个电压比较器的负极将被连接到L2L E D的负极上[7]㊂当音频信号增加到某个值,L1L E D灯亮的时候,数字量的输入端就会发出一个低级的输出,并且超声波的范围获取装置采用了先进的H C-S R04模块,在充电后,通过M C U I/0接口,将超声模块的T r i g触发器和E c h o接收器连接起来,从而实现对超声的探测㊂3.3驱动电路设计该系统采用L298N为驱动I C,它能对两个D C 喷射系统进行单独控制.L298N的I N1㊁I N2㊁I N3㊁I N4是两套D C泵的控制终端,并与M C U的控制针头相连,在.I N1和I N2极性相等的情况下,泵停止工作,E N A和E N B是P WM的P WM,E N A和E N B分别与S TM32F103C8T6的I/0接口相连,并利用所需要的工作循环P WM来控制L298N的输出电压幅值,从而调整泵的喷射量㊂3.4温湿度传感器温湿式传感器,是一款能够实时监控周围环境中的温㊁湿数据的传感器,它可以将传感器探测到的数据进行稳压滤波㊁运算放大㊁非线性校正等多种方式,将传感器探测到的数据转化为不同的电压或者电流,以此来估计温㊁湿度㊂温湿式感应器中含有一种湿感和一种感应器,它可以对周围的温度和湿度进行监测,一些感应器可以将其数据显示出来,而另一些感应器却无法直接测量,因为它体积小㊁稳定性好,所以被广泛用于各种场合[8]㊂D H T11是本文中使用的温度和湿度传感器㊂本产品具有数码标定的特性,在5%的湿度下,在2ħ下的温度㊂在20%~ 90%的范围内,0~50ħ的范围内,20%的温度㊂由于其稳定㊁精度极高,在各种型号的产品中得到了广泛使用㊂4系统软件设计在完成硬件电路的设计后,要按照交互喷泉的控制需求,使喷头可以随着喷头的响度而自动调节,并且一旦有人靠近喷头有危险,喷头就会立刻停㊃221㊃数字农业与智能农机第5期2023年5月Copyright©博看网. All Rights Reserved.下来㊂4.1软件整体设计按照本设计的需要,对单片上的串行和延迟功能进行了初步设计,然后在此基础上对超声波外设㊁A D C片上外设以及P WM的计时器进行了初步的初始化,然后通过超声波传感器对所获取的人员和泉水的间距进行了实时监测,在人类与泉水的距离不超过安全范围时,P WM的P WM输出的工作周期设定为0,从而向喷泉驱动回路的输出电压达到o V左右,从而使喷泉停止喷射[9]㊂4.2声音采集单元程序设计通过使用的音频获取线路,其输出的是一个模拟值的电压,它可以通过S T M32A D C芯片上的外部设备来获取,它的收集程序是一个集合的子过程㊂它的第一步是初始化A D C的G P I0引脚,它的工作原理是:首先,建立引脚时钟,引脚编号,引脚模式;其次,对A D C模式进行了设置,其中包含A D C时钟㊁A D C㊁通道㊁转换方式等设置;最后,对A D C的干扰进行了优化,并对A D C功能进行了初始化㊂4.3距离感应单元程序设计在此基础上,利用所使用的超声测距电路和工作原理,将S T M32M C U G P I0作为测头的T R I G和E C O H分段,它的设计中包含了探针时钟㊁探针编号和探针模式;然后再进行超声传感的中断优先级别的设定,其中包含了优先权和次序的配置;并结合超声波传感的工作机理,进行了超声波测量,编制了计算软件,并进行了故障处理功能的设置㊂4.4P WM水泵驱动部分软件设计针对S T M32P WM电路的P WM特性,采用软体方式来完成P WM的P WM输出㊂首先采用S T M32M C U P WM相应的G P I0引脚结构,其中引脚时钟㊁引脚号码㊁引脚模式设定为核心;其次,对计时器的时间基础和输出的输出进行了初始化,其中包括P WM模式的设定㊁输出使能的设定㊁输出通道的设定等㊂5系统软硬件调试在完成硬件电路设计㊁硬件平台搭建和软件编程设计的基础上,对传感器感应单元和P WM信号的输出单元进行了测试,并对整个电路进行了调试㊂该装置中传感器的组成有:声音传感器和超声波距离感应传感器[10]㊂语音传感器的输出分为两种类型:一种是数字信号;另一种是模态电压㊂而这一部分是由语音传感器所产生的模拟模式的,此仿真信号由S T M32A D转换电路实现,由P C软件实现,同时实现20D B㊁50D B和90D B音频信号的检测㊂由于被测的周围有天然的噪音,所以为更好地展示将纵轴放大10次㊂这样,在显示波形时会产生更多的扰动,这表明了信号的获取是与现实条件相吻合的㊂超声测距装置也是通过S T M32微处理器来完成测量,获得了测距的真实状态㊂系统P WM输出测试:S T M32的计时器被设置成一个输出对比方式,利用S T M32芯片上的外部器件来实现期望的P WM波的输出,并利用示波器来观测到P WM的各种工作周期㊂6结语通过对系统的硬件电路设计和软件程序的设计,最后通过对系统的各个模块和整体功能进行调试,该系统达到了所提出的设计要求,可以实现根据声音的振幅动态调节直流喷泉水泵的喷水量,达到增加喷泉互动性的效果,同时设置的距离感应模块在感知与人小于安全距离后,喷泉会自动停止运行,以保护游人安全㊂参考文献:[1]李萍.基于S TM32F334的数字开关电源[J].实验科学与技术,2021(5):43-47.[2]刘国友,王彦刚,李想,等.大功率半导体技术现状及其进展[J].机车电传动,2021(5):1-11.[3]熊一鹏,岳伟.F r e e R T O S多任务调度机制在监控单元中的应用[J].单片机与嵌入式系统应用,2021(9): 64-66.[4]赵林,方益民.基于D S P和C P L D超音频感应加热电源的研究[J].通信电源技术,2021(2):30-33. [5]石明祥.感应加热电源技术原理与应用[J].装备制造技术,2021(1):177-180.[6]刘宏勋,徐海.碳化硅电力电子器件及其在电力电子变压器中的应用[J].科学技术与工程,2020(36): 14777-14790.[7] X I A N G X i n x i n g,L U O A n,L I Y a n.I n t e l l i g e n t C o n t r o lM e t h o d o f P o w e r S u p p l y f o r T u n d i s h E l e c t r o m a g n e t i cI n d u c t i o n H e a t i n g S y s t e m[J].J o u r n a l o f M o d e r nP o w e r S y s t e m s a n d C l e a n E n e r g y,2020(6):164-171.[8]王宁,吴志生,周子轩,等.功率半导体器件在逆变弧焊电源中的应用与发展[J].焊接技术,2020(1):70-72.[9]李许军,坚葆林.高压S i C功率半导体器件的发展现状与挑战[J].集成电路应用,2020(2):30-33. [10]陈健.法拉第电磁感应定律的简易验证[J].物理教师,2019(11):52-54.作者简介:刘卫,男,1974年生,硕士㊁讲师㊂研究方向为信号检测与控制㊂㊃321㊃基于S TM32单片机的感应式互动喷泉设计与应用分析 刘卫Copyright©博看网. All Rights Reserved.。
基于STM32F103的温室花卉自动喷灌控制系统设计

基于STM32F103的温室花卉自动喷灌控制系统设计王一涯;陈曙光;王宪菊【摘要】针对温室大棚传统的灌溉存在水资源浪费、利用率低等问题,设计了一套自动喷灌控制系统.该系统以STM32F103单片机为核心,利用空气湿度传感器和土壤湿度传感器进行温室环境参数的实时采集,采集的数据送入单片机中,利用软件滤波算法和加权控制算法对数据进行处理,将处理后的数据与设置的限值进行比较,根据比较结果控制电磁阀实现喷灌工作.系统还具有参数设定、超限报警、数据存储和实时显示等功能.【期刊名称】《现代农业科技》【年(卷),期】2017(000)010【总页数】2页(P164-165)【关键词】STM32F103;花卉;土壤湿度;喷灌【作者】王一涯;陈曙光;王宪菊【作者单位】阜阳市春江农业科技有限公司,安徽阜阳 236000;阜阳师范学院;阜阳师范学院【正文语种】中文【中图分类】S237水资源缺乏是当今世界面临的主要重大问题之一,已引起各国关注。
近年来,温室花卉生产发展迅速,目前绝大多数温室大棚的灌溉模式陈旧,水的利用率只有45%。
因此,在温室大棚中引入节水喷灌控制技术应用研究对促进我国水资源的可持续发展具有重要意义[1]。
节水灌溉通过采用先进的灌溉方法和控制技术将水源尽可能均匀、适度地分配到作物根区土壤中,使土壤长期保持适宜于作物生长的水分、通气和营养状况等条件,从而达到提高水的利用率和节约用水的目的[2]。
节水灌溉技术是我国水利发展的薄弱环节,是我国现代化农业生产应用中的不足,因而节水灌溉技术势在必行。
温室花卉生长发育与环境因素息息相关,其关键环境参数有空气温度、湿度、土壤墒情、CO2浓度和光照强度等。
为使控制系统更加精确、稳定、可靠,本文选择空气湿度和土壤湿度为控制对象,根据二者的变化实时控制花卉的灌溉量,以达到温室花卉的自动喷灌控制的目的。
1.1 系统硬件设计系统硬件主要由STM32F103单片机、空气湿度传感器模块、土壤湿度传感器模块、按键模块、LCD液晶显示模块、报警模块、存储模块和驱动模块组成[3]。
基于STM32的大棚智能喷灌系统设计
基于STM32的大棚智能喷灌系统设计熊昌炯;马豪;刘建军【摘要】为提高大棚种植的自动化水平,提出设计一款智能喷灌系统.以STM32为核心控制器,利用DHT11传感器采集大棚环境的温度与湿度,并通过NRF2401无线传送模块将温湿度数据信息发送至核心控制柜;根据大棚的特点,布置好其所需要的管道与喷头数目,并判断所接收的温湿度数据是否低于设置的临界值,实现自动化喷灌.将所设计的智能喷灌系统应用于花卉大棚中,表明该系统能精确、稳定的喷灌,使得大棚种植的产量得到提高.【期刊名称】《榆林学院学报》【年(卷),期】2019(029)002【总页数】4页(P38-40,91)【关键词】智能喷灌系统;STM32;NRF2401【作者】熊昌炯;马豪;刘建军【作者单位】三明学院机电工程学院,福建三明365004;三明学院机电工程学院,福建三明365004;三明学院机电工程学院,福建三明365004【正文语种】中文【中图分类】S625.5近年来,农业中的大棚种植技术得到了较为普遍的推广[1-3]。
然而,现有的大棚种植设备简陋,如喷洒农药与浇灌作业,基本依靠人工完成,这直接导致了水资源与农药的浪费、效率低下[4-5],而且随着人工费用的增加,大棚智能喷灌系统的研究具有一定的迫切性。
因此,本文为实现对大棚作物精确、稳定的喷洒与浇灌,提出设计一款智能喷灌系统;以STM32为核心控制器[6-7],利用传感器DHT11采集大棚环境的温度与湿度,采集到的数据信息以NRF2401无线发送至核心控制器[8-9];然后根据设置的温度、湿度临界值,自动对大棚作物进行喷灌。
1 大棚智能喷灌系统总体设计本文设计的大棚智能喷灌系统主要由温度采集装置、管道喷洒装置与核心控制装置构成,如图1所示。
首先根据大棚实际环境,在各个垄布置所需的PU管道与喷头,同时在各垄的农作物布置温湿度采集模块(DHT11传感器与NRF2401无线收发装置),主控制箱上的通过电磁阀控制各路管道的出水情况。
基于单片机的智能微喷灌控制系统设计含开题报告
河北科技师范学院本科毕业设计开题报告智能微喷灌控制系统设计院(系、部)名称:机电工程学院专业名称:电气工程及其自动化学生姓名:学生学号:0413080101指导教师:2011年 12 月 28日河北科技师范学院教务处制毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于STM32F103的温室花卉自动喷灌控制系统设计

农业工程学现代农业科技2017年第10期图1系统硬件框图摘要针对温室大棚传统的灌溉存在水资源浪费、利用率低等问题,设计了一套自动喷灌控制系统。
该系统以STM32F103单片机为核心,利用空气湿度传感器和土壤湿度传感器进行温室环境参数的实时采集,采集的数据送入单片机中,利用软件滤波算法和加权控制算法对数据进行处理,将处理后的数据与设置的限值进行比较,根据比较结果控制电磁阀实现喷灌工作。
系统还具有参数设定、超限报警、数据存储和实时显示等功能。
关键词STM32F103;花卉;土壤湿度;喷灌中图分类号S237文献标识码A 文章编号1007-5739(2017)10-0164-02Design of Greenhouse Flowers Automatic Sprinkler Irrigation Control System Based on STM32F103WANG Yi-ya 1CHEN Shu-guang 2WANG Xian-ju 2*(1Fuyang Chunjiang Agricultural Technology Co.,Ltd.,Fuyang Anhui 236000;2Fuyang Normal University )Abstract For the problems of water resource waste and low utilization of greenhouses traditional irrigation ,designed a set of automatic irrigation control system.The system with STM32F103as the core ,used air humidity sensor and soil humidity sensor for real -time acquisition of greenhouse environment parameters ,data was sent to MCU ,dealed with data by using the software filtering algorithm and weighted control algorithm ,the processed data was compared with set limit.Sprinkler irrigation work was achieved by relay control solenoid valve.System had the functions of parameter setting ,data storage and real-time display and transfinite alarm.Key words STM32F103;flower ;soil moisture ;sprinkler irrigation基于STM32F103的温室花卉自动喷灌控制系统设计王一涯1陈曙光2王宪菊2*(1阜阳市春江农业科技有限公司,安徽阜阳236000;2阜阳师范学院)水资源缺乏是当今世界面临的主要重大问题之一,已引起各国关注。
基于STM32单片机的自动喷灌机器人
基于 S T M3 2单片机 的 自动 喷灌机 器人①
赵 涛 ,陶重彝 ,冯佳佳 2 孙云飞
州 科 技 大学 天平 学 院, 苏州 2 1 5 0 0 9 ) ( 苏州 科 技 大 学 建 筑 智 慧 节 能 江 苏 省 重 点 实 验 室 , 苏州 2 I 1 5 0 0 9 )
计 算机 系统 应用 I S S N 1 0 0 3 . 3 2 5 4 , C O DE N C S A OB N
E - ma i l : c s a @i s c a s . a c . c n
h t t p: / / www. c — s - a . o r g . t ; n
A bs t r a c t :I n vi e w o f t he l o w e ic f i e nc y a n d hi g h l a b o r i n t e n s i t y i n a g r i c u l t u r a l g r e e n h o us e , i n o r de r t o i m pr o ve t he a u t o ma t i o n o f a g r i c u l t ur a l g r e e n ho us e ,a n a u t o ma t i c s pr a y r o b o t b a s e d o n ST M3 2 M CU i s p r o p o s e d i n t h i s p a p e r a s t he
( T i a n p i n g C o l l e g e o f S u z h o u Un i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , S u z h o u 2 1 5 0 0 9 , C h i n a ) ( B u i l d i n g T n t e U i g e n t a n d E n e r g y S a v i n g Ke y L a b o r a t o r y o f J i a n g s u P r o v i n c e , S u z h o u Un i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , S u z h o u 2 1 5 0 0 9 , C h i n a )
基于STM32的无人机喷洒系统
基于STM32的无人机喷洒系统
张哲深;王春达;李宁;张全禹
【期刊名称】《电子制作》
【年(卷),期】2016(0)6
【摘要】介绍了一种基于STM32控制器的农田喷洒系统,通过使用新型的飞控PIX,以及改良硬件设施,对姿态角的控制,提高了无人飞行器的续航能力,简化了操作,方便农业使用,使农耕人员能在较短时间内掌握该设备的使用方法,只要选择农田环境以及设置需要的喷洒量就可以进行农田喷洒作业。
【总页数】2页(P8-9)
【作者】张哲深;王春达;李宁;张全禹
【作者单位】绥化学院电气工程学院黑龙江绥化 152061;绥化学院电气工程学院黑龙江绥化 152061;绥化学院电气工程学院黑龙江绥化 152061;绥化学院电气工程学院黑龙江绥化 152061
【正文语种】中文
【相关文献】
1.基于STM32微控制器的无人机农药喷洒系统设计 [J], 龙吉
2.基于CAN总线的旋翼无人机喷洒模拟系统 [J], 张艳超;陈杨;李艺健;刘飞;何勇
3.基于多传感器卡尔曼滤波的无人机喷洒系统精确流量获取方法 [J], 安斯奇; 徐星辰; 陈淑仙; 吕东晓
4.基于多传感器卡尔曼滤波的无人机喷洒系统精确流量获取方法 [J], 安斯奇; 徐星辰; 陈淑仙; 吕东晓
5.一种基于多传感器数据融合的变量喷洒无人机控制系统 [J], 李彦沛; 邱新伟; 陈冠廷; 孙永祥; 周虎健
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
此处I2C通信模块的整体设计可通过程序图3进行描述,图中发送两个EEPROM地址,第一个EEPRON地址是EEPROM设备地址,从第二个EEPROM是存储数据首地址。2416EEPROM规定每一页为16 B,程序在设置过程中以E2416_PageWr()对页进行写操作,以E2416_ByteWr()对字节进行写操作,写入到EEPROM指定的地址,同样设置E2416_BufRe()、E2416_PageRe()进行页读操作以及E2416_ByteRe()进行字节读操作,从指定的地址中读数据。若需更改墨水的数据时借助串口交互的选择,把需要数据通过I2C通信机制直接写入到24c16数据存储EEPROM中,实际上写入到了预留的同一块ROM中。而且在喷头实际工作过程中可把确定的数据在上电初期通过函数E2416_BufRe()以及E2416_PageRe()来读取开关波形及喷头配置数据。
ቤተ መጻሕፍቲ ባይዱ3 基于系统的软件设计
整个软件的架构中分别对串行通信、24c16EEPROM存储、改进运算形式、主控状态机切换等进行设计与研究。最后借助PC上串口调试器或外扩128x64LCD显示人机交互来校正喷绘机的喷头。
3.1 通信界面的设计
通信界面是为用户简单、方便地更换墨水的T-V数据和校正喷绘机喷头而设置的显示工具。图2为串行通信的流程,从图中可以看出,主菜单在调试过程中,通过选项来进入温度校准、电压校准、容积电压Vrank输入或是配置数据的输入。借助于串口通信,在需要更新墨水的T—V数据时,无论用户是否熟练新产品的使用,都可直观操作把厂家提供的温压数据通过选择不同命令符写入24c16EEPROM。
基于STM32在喷绘机喷头控制系统的设计与实现
摘 要: 选取STM32系列STM32F103RBT6作为喷头的主控制系统,将24c16EEPROM作为外部存储器,通过I2C通信机制传送喷头T-V数据和配置数据,借助UART或128x64LCD达到人机交互。经过理论分析和软硬件结合测试,验证了该喷头控制系统的可行性和方便性。
不同厂家油墨温压数据不同,厂家会根据每种墨水的种类和颜色在出厂前给出一组关于墨水在不同温度下的电压补偿值,根据喷头墨腔内部墨水温度变化动态地调整每个喷头的驱动电压以保证喷射出的墨水点滴大小一致、视觉效果更清晰。为防止在掉电的情况下数据丢失和避免不小心更改,数据通常存储在只读存储器中。EEPROM存储量有限又需存储不同种类的T—V数据时,可以将数据通过算法[2]进行压缩后存储在ROM中。当今市场喷绘机数量越来越多,出于对喷绘机性能考略,本设计在温压数据读取时避免使用算法降低速度,借助嵌入式经典的“空间换时间”理论,以日本精工集团的IRH1513D喷头为研究对象,在24C16EEPROM中存储配置数据。每次初始化后通过I2C通信机制读数据,工作时喷头需要更新电压时通过DMA方式快速传送温度数值(A/D转化值),迅速更新喷头所需驱动电压。过程中发现喷头工作有误差时借助显示工具设置按键对其校验,过程中适当改进运算形式来提高喷头控制系统效率。
关键词: STM32;24c16EEPROM;I2C;T-V数据;喷绘机
0 引言
由于喷绘机喷绘过程中采用的是压电喷头[1]工作原理,为保证喷绘出图像清晰细腻,喷绘机需要在同一温度下提供稳定的驱动电压对压电晶体进行控制。如何在精准的条件下根据室内温度实时、快速、方便地更改驱动电压和配置数据值得研究。
3.4 主控状态机切换设计
STM32主控程序设计是整个控制系统核心。为了优化系统设计,提高主控的处理速度,此处设计采用。图5显示了基于I2C通信机制EEPROM存储验证。为验证结果的正确,向24C16EEPROM写入数据0x0a、0x0b并用示波器观察波形图,其中通道2为SCL波形,通道1为SDA波形,结合两个通道信号和写入数据验证此系统存储设计可行。图6是借助串口收发机制来更新墨水T-V数据、喷头配置文件以及校验显示,从图可看出UART采用的是并口COM1、波特率为115 200 b/s,8 bit数据位和1 bit停止位,无奇偶校验收发机制下可正确显示主控的收发信息与程序设计一致。图6中主校菜单下通过串口向STM32发送“数字选项”来进入温度校准、12 V输出校准、29 V输出校准、容积电压Vrank输出等菜单。图中是在选择“9”下喷头的配置数据输入时的显示,包括喷头配置数据、开关波形数据以及没有显示全的温压曲线等数据。
2 基于系统的硬件设计
图1为控制系统硬件结构建构。从图可看出设计中以STM32为主控,选取支持I2C通信机制、2 KB存储量的24C16EEPROM作为外部存储器,主控中集成的I2C 2的时钟线SCL(PB10引脚)和SDA线(PB11引脚)与EEPROM的SCL和SDA分别通过外接一个上拉4.7 k?赘电阻连接。设计中主控集成I2C 2作为外部数据存储器的时钟和数据的发送,24c16EEPROM作为从设备,选取200 kHz的读取速度。通过主控中的I/O口读取温度模拟量,显示调整数据时采用UART或128x64LCD,采用128x64的静态LCD主要方便客户使用,研发者主要使用UART进行校正,外扩按键为了校验误差或测试喷头状态等。上电开始和结束时需给喷头发送开关波形数据、命令,工作时读取喷头的状态需要实时更改主控PWM即补偿电压。系统中硬件按键消抖在主控中延时实现,通过按键可进入校验、T-V数据输入、喷头测试状态。为快速处理数据,主控内A/D转化值借助DMA传输方式。
5 总结
随着喷绘技术的发展,对喷头控制系统的要求越来越高。本设计基于简单、方便的考虑,以STM32作为主控制平台,以24c16EEPROM作为外部存储,结合软件设计出喷头控制系统。通过实践和理论研究证明,系统不仅简捷、方便,而且更改容易且执行过程中在一定程度上提高了系统的效率,达到了理想的预期效果,但此控制设计系统没能面向市场,还存在不少缺陷和不足,需以后加以弥补和改进。也希望将来此设计系统可以广泛应用于喷绘机喷头控制系统中。
3.2 基于24c16EEPROM存储设计
根据I2C的通信机制,首先主机发送一个起始条件,从机接收到后回发一个ACK响应信号。然后主机发送地址字节(地址字节为7位,最后一位为读写标志位),进行数据的读写传输。每次接收方回发一个ACK。最后主机发送停止信号结束通信。24c16EEPROM芯片手册,在发送地址7位中前四位必须是1010,此处DEVICE ADDRESS(设备地址)是通过(0xao|(读写地址))发送。通信时调用函数E2416_BufWr((u8*)&D0_confOn[0],ONWAVE_ADDR,NbrOfReg)来进行写操作设计,其中函数的参数(u8*)&D0_confOn[0]定义为首个无符号字节数据地址,ONWAVE_ADDR参数是指向写入到EEPROM的地址,参数NbrOfReg是写入数据的个数。
1 系统设计理念
喷头的驱动电压VDD2(t)取决于喷头容积电压Vrank、基于不同厂家不同颜色的油墨粘滞度而提供每色油墨与标准油墨的修正值Voffset电压、不同颜色的油墨在不同温度下需要的驱动电压补偿值Vdiff(t),即VDD2(t)=Vrank+Voffset+Vdiff(t)。不同颜色的油墨在不同的温度下驱动电压的补偿值Vdiff(t),称之为T-V数据。
3.3 改进运算形式
根据以上设计,喷头开始工作前,STM32主控制器从24c16EEPROM的外存储通过I2C通信机制读配置数据,其中包括存储高电压时PWM OCR1比较值Hm和存储低电压时PWM OCR1比较值Lm,程序中定义两个比较值,高低电压Hx、Lx是对应的实际高低电压的10倍。根据理论知PWM OCR1的值和对应STM32输出电压成正比。当PWM OCR1的值高时,STM32输出的电压高。所以得比例(Hm-Lm)/(Hx-Lx)=(m-Lm)/(x-Lx),其中m代表任意时刻PWM OCR1的比较值,x代表任意时刻当PWM OCR1的比较值为m时所对应输出电压的10倍,化简得m=(H_Lm*(x-Lx)+Lm*H_Lx)/H_Lx。读到一个温度,通过查表找到需要补偿电压,最后把补偿电压、修正电压、容积电压相加算出最后喷头需要的电压x,通过以上化简知m=(H_Lm*(x-Lx)+Lm*H_Lx)/H_Lx,计算出PWM OCR1中需要值m改变PWM。喷头工作的电压是12 V~29 V,精确到0.1 V,在设计过程中把实际高低电压Hx、Lx以及更改的输出电压扩大10倍。不难看出运算形式及结果没有改变,而存储上需占更多空间,但是不改则需要浮点型数的运算。相比较而言,提高10倍虽增加存储空间但较少计算时间,提高执行效率。
控制系统采用一个主控STM32控制一个喷头形式,所以外存储上不需存储墨水的颜色和控制喷头型号等数据,喷头采用日本精工集团的IRH1513D。系统上电初始化后,主控通过I2C通信机制把24C16EEPROM作为从设备读取喷头Vrank容积电压、温压曲线、开关波形等数据。而且此程序中使用容积电压Vrank、Voffset和ADCValOff以十倍进行存储运算,每个数据定义2 B即16 bit。综合考略24C16EEPROM外存储单元,地址分配设计为:地址0x00~0x166共358 B存储温压偏移曲线数据;地址0x200~0x201存储16 B墨水的容积电压Vrank;地址0x202~0x203存储此种油墨修正电压Voffset;地址0x204~0x205存储喷头25℃时需要校准参数本底偏移值AdcValBOff;地址0x206~0x207存储当PWM OCR1为高点电压比较值时所对应十倍电压Hm;地址0x208~0x209存储当PWM OCR1为低点电压比较值时所对应十倍电压Lm;0x210~0x221共12个地址空间存储喷头必要的配置数据;地址0x300~0x33c共60 B用于存储喷头的开波形数据;地址0x340~73c共60 B用于存储喷头的关波形数据。