机构速度和加速度分析的一般图解法
第三章 机构的运动分析--相对运动矢量方程图解法

VB VA VBA
大小
•
? √ 方向 ? √
LAB AB
n BA t BA
VA • aA
A V B
VBA
B
aB aA a a
大小
aB •
A
? 方向 ?
√ 2LAB LAB √ BA AB
0
2 1 2 1
a a a
n
大小: 21 vB B 2 1 vB B Sin 90 2 1 vB B
2 1
方向:将 v B B 的方向顺着 1的转向转 900
aB B
2
K
1
大小: 21 vB B 2 1 vB B Sin 90 2 1 vB B
0
2 1 2 1
连接点p与任一点的矢量便代表该点在机构图中的同名点
的绝对速度,其指向是从p指向该点。如p→x代表 vX
连接其他任意两点的矢量便代表该两点在机构图中的同名
点间的相对速度,其指向适与速度的角标相反。如x→y代 表 vYX
速度影像的应用条件是同一构件内。
加速度影像(梅姆克第二定理)
– 一个刚体上三个点的加速度矢量末端在加速度平面图 中所构成的三角形与原始三角形同向相似。 π称为极点,代表所有构件上绝对加速度为零的点。 连接点π与任一点的矢量便代表该点在机构图中的同名点的 绝对加速度,其指向是从π指向该点。如π→x’代表示 aX 连接带有角标’的其他任意两点的矢量便代表该两点在机构 图中的同名点间的相对加速度,其指向适与加速度的角标相 反。如x’→y’代表 aYX 加速度分量一般用虚线表示。切向加速度用同名而不同上标 的两个字母表示,方向指向单撇(’)点。如y”→y’代表 atYX。而Y→X的向心加速度x’ → y”代表 anYX
《机械原理》
?
方向: ? C→D
√ √
√ ⊥BC
图解上式得p’c’b’: aC =μ a p’c’ α 4= atC / lCD 方向:CCW α 3 = atCB/ lCB 方向:CCW 利用影象法求得p’c’e’ (d就是p) aE =μ a p’e’ 求构件6的加速度: aF = aE + anFE + atFE 大小: ? √ √ ? 方向: √ √ ‖FE ⊥FE 其中:anFE=ω 25lFE 求得: aF =μ a p’f’ atFE =μ
A
α
B
I5
3
3
2 ω 3α b
ω4
4D
4
x4 Eα 5ω 5 5
F
6
x5
e x
③构件3、5上速度为零的点I3、I5
求作△bcp∽△BCI3 △efp∽△EFI5 得I3 得I5
f
c
p
I3
④构件3、5上加速度为零的 点Q3、Q5
求作△b’c’p’∽△BCQ3 △e’f’p’∽△EFQ5 得Q3 得Q5
ω 3 = μ vpb3 / lCB
b2
②加速度关系
2
A 1
ω1
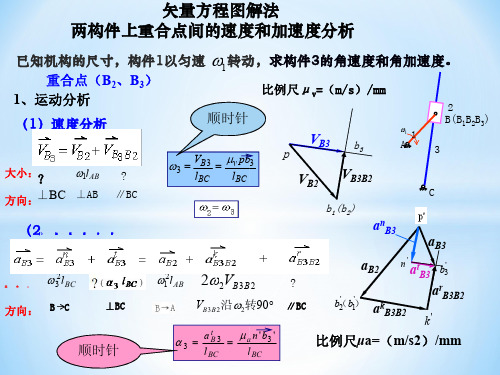
B aB3 = anB3+ atB3 = aB2+ arB3B2 + akB3B2 3 21 2 l 3 αω 3 ? 2 VB3B2ω 3 大小: ? ω 3 BC ? l1ω C √ b3 方向: ? B→C ⊥CB B→A ∥BC 方向:VB3B2顺ω 3转过90°。 p ak B3B2
已知摆式运输机运动简图、各构件尺寸、ω 2,求: ①VF、aF、ω 3、ω 4、ω 5、α 3、α 4、α 5 ②构件3、4、5中任一速度为Vx的点X3、X4、X5的位置 ③构件3、5上速度为零的点I3、I5 ④构件3、5上加速度为零的点Q3、Q5 C 3 ⑤点I3、I5的加速度。 aI3、aI5 ω4 B 解:1)速度分析 ω2 E 2 ω3 4 VB=LABω 2 ,pb =VB / μ V A D
第3.3节 用矢量方程图解法作运动分析
c
速度多边形的用途 由两点的速度求构件上任意点的速度 C A 例如,求BC中间点E的速度VE 时,bc上 中间点e为E点的影像,连接pe就是VE a p ω E B
e b
c
2、同一构件上两点加速度之间的关系 设已知角速度ω ,A点加速度,求B点的加速度 A B两点间加速度之间的关系有: A
BA
C ω B aB
2 2 2
方向:顺时针
+ω +ω +ω
4 4 4
= μ aa’b’ = μ a a’c’ = μ a b’c’ A p’ ω α aA C
B
aB
得:a’b’/ lAB=b’c’/ lBC= a’ c’/ lCA
∴△a’b’c’∽△ABC
p’a’b’c’-加速度多边形(或速度 图解), p’-极点 加速度多边形的特性: ①联接p’点和任一点的向量代表该 点在机构图中同名点的绝对加速 度,指向为p’→该点。
VB B
2
VB B
2
1
1
VB
2
2
B(B1,B2)
vB2 vB1 vB2B1
VB
1
1
A
ω1
VB B
2
VB B
2
1
1
VB
:
aB2 aB1 a k B2B1 a r B2B1
2
2
B(B1,B2)
VB
aB1 a n B1 a t B1
等速
1
1
A
ω1
④极点p’代表机构中所有加速度为零的点。 用途:根据相似性原理由两点的加速度求任 意点的加速度。 例如,求BC中间点E的加速度aE 时,b’c’上中间
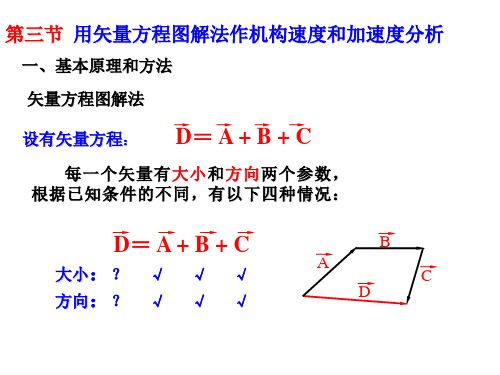
矢量方程图解法作速度加速度分析

2、作图方法
具体方法为图解矢量方程。
基础知识:一个矢量有大小和方向两个要素。
用图解的方法一个矢量方程可以求出两个未知要素(包括大小和
方向均可以)。
例题:
C B
A P
A BC
大小 ? √ ?
方向 √ √ √
A BC
大小 √ √ ?
方向 √ √ ?
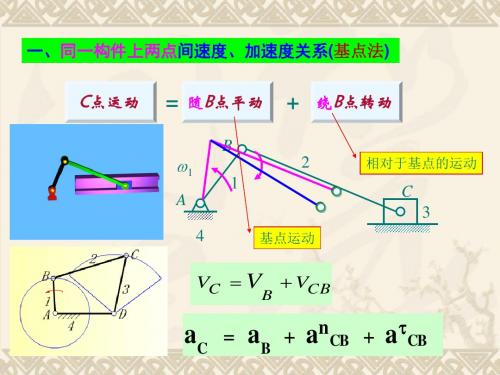
二、同一构件上两点之间的速度和加速度关系
8
8
B
3
P23 (P24)
2
4
C P34
1
A P12
(b) P13
8
P23 B 3 P34
2
A P12
1
4
P24 C P14
8
(d)
P13
3
A
M P23B
Vm
P24
2 A P12
1
C4
P14 P34
8
青岛滨海学院教师教案 §3-3 用矢量方程图解法作机构的速度及加速度分析
一、矢量方程图解法的基本原理及作图法
注意:速度影像只能应用于同一构件上的各点。 总结:
1) 一个矢量方程最多只能求解两个未知量; 2) P 称为极点,它代表机构中所有构件上绝对速度为零的点;
青岛滨海学院教师教案
(速度多边形中仅此一点,它可能对应机构中多个点:机架上的点或构件的绝 对瞬心点)
3)由 P 点指向速度多边形中任一点的矢量代表该点的绝对速度大小和方 向;
们可以得到:
(B1 B2 ) B
1 2
VB2 VB1 VB2B1
青岛滨海学院教师教案
aB2
a B1
aBr 2B1
机械原理第七版第三章
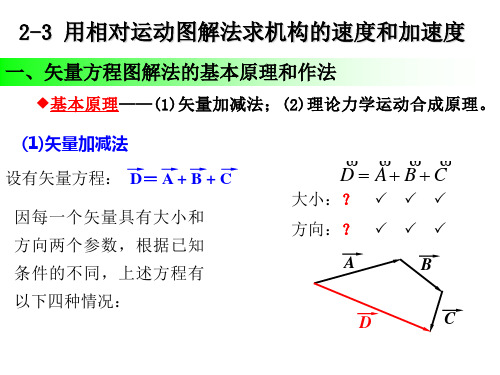
(二)、用解析法对平面连杆机构进行运动分析 用解析法对平面连杆机构进行运动分析又可分为:矢 量方程解析法、杆组法和矩阵法等。 矢量方程法是将机构中各种构件视为矢量,并构成封 闭矢量多边形,列出矢量方程,进而推导出未知量的表达 式。
复数矢量法 图示四杆机构,已知机构各构 件尺寸及原动件1的角位移θ 1和 角速度ω 1 ,现对机构进行位置、 速度、加速度分析 1、位置分析 矢量方程式:
第三章
平面机构的运动分析
§3-1 机构运动分析的任务、目的和方法 §3-2 用速度瞬心法作机构的速度分析
§3-3 用矢量方程图解法作机构的速度及 加速度分析
§3-4 综合运用瞬心法和矢量方程图解法 对复杂机构进行速度分析 §3-5 用解析法作机构的运动分析 返回
§3-1 机构运动分析的任务、目的和方法
i
2
l33e
i
3
l11 cos 1 l22 cos 2 l33 cos 3 l11 sin 1 l22 sin 2 l33 sin 3
3l3 sin( 3 2 ) 1l1 sin( 1 2 )
1L1 sin( 1 2 ) 3 L3 sin( 3 2 )
1L1 sin( 1 3 ) 2 L2 sin( 2 3 )
1L1 sin( 1 3 ) 2 L2 sin( 2 3 )
3、加速度分析
l11e i l22e i l33e i
1 2
3
2 i il1 1 e1
1
i l2 2e 2
1.任务 根据机构的尺寸及原动件已知运动规律,求构件中从动件上 某点的轨迹、位移、速度及加速度和构件的角位移、角速度及角 加速度。 2.目的 了解已有机构的运动性能,设计新的机械和研究机械动力性 能的必要前提。 3.方法 主要有图解法和解析法。图解法又有速度瞬心法和矢量方程 图解法(又称相对运动图解法)。 图解法: 形象、直观,用于平面机构简单方便,但精度 和求解效率较低。 解析法: 计算精度和求解效率高。可借助计算机计算。
考研机械原理第二讲 机构的运动分析

第二讲平面机构的运动分析一用速度瞬心法作机构的速度分析1 速度瞬心的定义:作平面相对运动两构件上任一瞬时其速度相等的点,称为这个瞬时的速度中心。
分类:相对瞬心-重合点绝对速度不为零绝对瞬心-重合点绝对速度为零2 瞬心数目 K=N(N-1)/23 机构瞬心位置的确定直接观察法:适用于求通过运动副直接相联的两构件瞬心位置。
1)两构件组成转动副时,转动副中心即是它们的瞬心。
2)若两构件组成移动副时,其瞬心位于移动方向的垂直无穷远处。
3)若两构件形成纯滚动的高副时,其高副接触点就是它们的瞬心。
4)若两构件组成滚动兼滑动的高副时,其瞬心应位于过接触点的公法线上。
不直接形成运动副的两构件利用三心定理来确定其具体位置。
三心定理:三个彼此作平面平行运动的构件共有三个瞬心,且它们位于同一条直线上。
此法特别适用于两构件不直接相联的场合。
4传动比的计算ωi /ωj=P1j P ij / P1i P ij两构件的角速度之比等于绝对瞬心至相对瞬心的距离之反比5.角速度方向的确定相对瞬心位于两绝对瞬心的同一侧,两构件转向相同相对瞬心位于两绝对瞬心之间,两构件转向相反。
常见题型:1.速度瞬心的求解(会用正多形法)2利用速度瞬心求解速度。
ωi /ωj =P 1j P ij / P 1i P ij例题:在图示四杆机构中,AB l =60mm ,CD l =90mm ,AD l =BC l =120mm ,2ω=10rad/s ,试用瞬心法求: (1)当ϕ=45°时,点C 的速度C v;(2)当ϕ=165°时,构件3的BC 线上(或其延长线上)速度最小的一点E 的位置及其速度大小;(3)当C v =0时,ϕ角之值(有两个解)。
P 13C(a)解:以选定的比例尺0.005/l m mm μ=作机构运动简图如图3-2所示。
(1)定瞬心P 13的位置,求v c 。
131331 6.07rad /AP DP l l s ωω==30.547/c l v CD m s μω==(2)如图(b )所示,定出构件2的BC 线上速度最小的一点E 位置及速度的大小。
第3章机构的运动分析-1

an EB
C 3 4
ω3
aE e'
b'
ω2
A
2
aB
1
w4
D
a
t EB
a
n EB
(P12 )
以曲柄滑块机构为例,进一步说明用矢量方程图 解法作机构的速度分析和加速度分析的具体步骤。
例 : 已知曲柄滑块机构原动件 AB 的运动规律和各构件尺寸。求: (1)图示位置连杆BC的角速度和 其上各点速度。 (2)连杆BC的角加速度和其上C点 加速度。 ω2 2
极点
C
vEC
vCB vEB
b
bc 代表 vCB 。
e
3)在速度多边形中,极点p 代表机构中速 度为零的点。 4)已知某构件上两点的速度 ,可用速度影 像法求该构件上第三点的速度。
速度多边形
E B
A
C
vC x
p
极点
C
vEC e
vCB
vB
vEB
b
△bce ~ △BCE
已知连杆上两点的速度vB 、vC 用速度影像法可以确定vE 。
④确定点的轨迹(连杆曲线)。
V型发动机运动简图
D
E
C B
A
3-1
机构运动分析的任务、目的及方法
1.机构运动分析的任务与目的
(2)速度分析
5 4
①掌握从动件的度变化规律 是否满足工作要求。如牛 头刨床; ②为加速度分析作准备。
2
1 3
6
3-1 机构运动分析的任务、目的及方法
1.机构运动分析的任务与目的
用三心定理可以确定ω3、ω4 的大小。
平面铰链四杆机构
例2:用三心定理分析凸轮机构速度 (v3)。 1
机械原理 第二章-2相对运动图解、解析
1
3
aC1n c2 (c3) aC1t 4 D
A
4 P c1
一步减少未知数的个数。
n t k r aC2 aC3D aC3D aC1 aC2C1 aC2C1
2 3 l3
大小: 方向:
? 3l3
√ √
21vC 2C 1 ?
√ ∥AB
C→D ⊥CD
2) 取速度比例尺a , 作 加速度多边形。
P
c1
( 顺时针 )
2. 加速度分析:
1) 依据原理列矢量方程式 分析:
aC2 = aC1 + aC2C1
B
2 C akC2C1
当牵连点系(动参照系)为 转动时,存在科氏加速度。 3
D 4
ω1
1
1
c2 (c3)
r k aC2C1 aC2C1 aC2C1
科氏加速度
A
4 P c1
k r a 2 v
√
√
22lBC
C→B
?
⊥BC
b) 根据矢量方程式,取加速度比例尺
a
实际加速度
c´ 图示尺寸
m/
s2
p
mm
, 作矢量多边形。
c e b
p
极点
n
b
由加速度多边形得:
aC a pc m / s2
t 2 aCB l BC a nc l BC
同样,如果还需求出该构件上E 点的加速度 aE,则
pe 则代表 aE
由加速度多边形得:
p c´ n
aE pea
△b’c’e’ ~ △BCE , 叫 做
△BCE 的加速度影像,字 母的顺序方向一致。
机构速度和加速度分析的一般图解法

§3-2 用图解法作机构的运动分析
1.矢量方程图解法
(1)矢量方程图解法的基本原理 理论力学中的运动合成原理 (2)矢量方程图解法的作法 在对机构进行速度和加速度分析时,首先根据运动合成原理 列出机构运动的矢量方程,然后再按方程作图求解 两构件以转动副相连时,在转动副中心处具有相同的速度和
加速度,两构件以移动副相连时,两构件具有相同的角速度和角
加速度
§3-2 用图解法作机构的运动分析
(3)矢量图的画法
D A B C
大小:? √ √ 方向:? √ √ √ √
D A B C
大小:√ 方向:√ ? ? √ √ √ √
B A
D
B
C
A
D
C
§3-2 用图解法作机构的运动分析
D A B C
加速度存在的条件
当两构件构成移动副,若移动方向无转动分量即只作平动时, 无科氏加速度; 当两构件构成移动副,若移动方向含有转动分量时,存在断
科氏加速度 3
2 2 3 2
2 3
3
大小:√ ?√√
方向:√ √ ?
?
方向:√ √ ? √
B
B
A D
C
A D
C
§3-2 用图解法作机构的运动分析
2.利用同一构件上两点间的速度和加速度矢量方程作图求解
第六章 平面机构的性能分析-2
VB2B1
aKB2B1
(2)对于活动导路转动的移动副进行加速度分析时,除牵
连加速度和相对加速度之外,应添加:
科氏加速度aKB2B1 其大小为
aKB2B1 =21vB2B1
其方向为 相对速度vB2B1按牵连角速度1的顺、逆时针方向转过90的指向。
2
3、组成移动副的两个构件重合点间速度、加速度关系
①速度关系
VB3=VB2+VB3B2
2
A 1 ω1 B
3 ω3 C
大小: ? √ 方向: √ √
VB3B2 的方向: b2 →b3
? ∥BC μ v= VB2 / pb2
p
ω 3 = μ vpb3 / lCB
b2
② 加速度关系 aB3 = anB3+ atB3 = aB2+ arB3B2 + akB3B2
v v v
VA A
C
√ ? √ ⊥CB pc 方向:p → c
ω
a a
VBA
B
ac 方向: a → c bc 方向: b → c
方向如图
AB杆的角速度ω =VBA/LBA=(μ vab)/(μ l AB ) 同理:ω =(μ vca ) /(μ l CA) 得:ab/AB=bc/ BC=ca/CA
VCA VCB
图示机构中 连杆2上 B、C两点。 以运动参 数已知的B点为基点。
基点法研究的两点是同一 构件上不同位置的两个转 动副对应位置点。
②作平面运动的构件的两个基本运动副中,一个是转动副, 另一个是移动副,用重合点法建立两活动构件在该转动副中 心处的两重合点间的运动关系。
机械原理-机构的运动分析
3、加速度分析
aC aB aCB
a C a C aB a CB a CB
n t n t
a B 12l AB
F
1
1 A B 2 E C
大小 lCD32
?
→A
lCB22 C→B
? ⊥CB
·
G
3
方向 C→D ⊥CD
取极点p’ ,按比例尺a作加速度图
1
4
D
' aC a p 'c ' aCB a b 'cc´
思考题:
P44 3-1
作业:
P44 3-3、3-6、3-8(b)
§3-3 用矢量方程图解法作机构的运动分析
一、矢量方程图解法的基本原理及作图法
1、基本原理 —— 相对运动原理 B(B1B2) 1
B
A
同一构件上两点间的运动关系
2
两构件重合点间的运动方程
vB v A vBA
aB a A aBA aA a
c´
aC a G e´
aCB
n2 ´ n2
p´
n3
aF
b´
加速度图分析小结: 1)p‘点代表所有构件上绝对加速度为零的影像点。 2)由p‘点指向图上任意点的矢量均代表机构图中对应点 的绝对加速度。 3)除 p′点之外,图中任意两个带“ ′”点间的连线 均代表机构图中对应两点间的相对加速度,其指向与加 速度的角标相反。 4)角加速度可用构件上任意两点之间的相对切向加速度 除于该两点之间的距离来求得,方向的判定采用矢量平 aCB b ' c ' 移法。 5)加速度影像原理:在加速度图上,同一构件上各点的 绝对加速度矢量终点构成的多边形与机构图中对应点构 成的多边形相似且角标字母绕行顺序相同。 6)加速度影像原理只能用于同一构件。
用矢量方程图解法作机构的速度及加速度分析
b2
ω3=v pb3/LBC,顺时针方向
加速度关系a ① 加速度关系
A
r B3B2
aB3 = a
大小 方向 ak
n B3
+a
t B3
= aB2 + a
+a
k B3B2
1 2 B
ω1
? ω23LBC ? ω21LAB ? 2vB3B2ω3 ? B→C ⊥CB B→A // //BC √ 转过90 沿ω3转过 °
方程不可解 方程可解 G C F E
D
vG = vB + vGB = vC + vGC = vG 大小 ? √ ? ? √ ? 方向 ? √ √ √ √ ?
● 重合点应选已知参数较多的点(一般为铰链点) 。 重合点应选已知参数较多的点(一般为铰链点) 选C点为重合点 点为重合点 v C 3 = v C 4 + v C 3C 4 ? ? 大小 ? 方向 ? √ √
c b
p
角速度 ω=vBA/LBA=v ab/l AB,顺时针方向 / , 同理 ω=v ca/l CA / ω=v cb/lCB / 因此 ab/AB=bc/BC=ca/CA / / / 于是 abc∽ABC
速度多边形 c b 速度极点 速度零点) (速度零点) C A
ω
a
B
p
●
●
●
●
速度多边形( 速度多边形(Velocity polygon)的性质 ) 联接p点和任一点的向量代表该点在 联接 点和任一点的向量代表该点在 机构图中同名点的绝对速度, 机构图中同名点的绝对速度 , 指向 C 为p→该点。 →该点。 A 联接任意两点的向量代表该两点 ω 机构图中同名点的相对速度, 在 机构图中同名点的相对速度 , 指向与速度的下标相反。 指向与速度的下标相反 。 如 bc代 代 a 表 vCB 而不是vBC 。 常用相对速度 而不是 来求构件的角速度。 来求构件的角速度。 abc∽ABC,称abc为ABC的速 ∽ , 为 的速 c 度影像( ) 度影像(Velocity image),两者相似 b 且字母顺序一致, 且字母顺序一致 , 前者沿 ω方向转 过90。 速度极点 极点p代表机构中所有速度为 速度极点 代表机构中所有速度为 零的点的影像。 零的点的影像。
机械原理(2015春)矢量方程图解法 两构件上重合点间的速度和加速度分析
a = a + a + a 则
k
r
c1
c2
c1c2
c1c2
w a = 2 V k
c1c2
2 c1c2
4 例题:已知构件1的运动,求: vC 、vD及 w2、w5和a5
(1)速度分析
v D = v B + v DB
大小 ? √
?
方向 ? √
√
v C = v B + v CB
?
√
?
√
√
√
vC = mv pc (m s) vCB = mv bc (m s)
.
p
VB3
b3
VB2
VB3B2
b1(b2)
w1 1
A
3
C
(2)
加
速
度
分
析
a n B3 a B3
大
小
:
w 32 l BC
方向: B C
⊥BC
顺时针
w12l AB
2w2VB 3 B 2
VB 3 B 2沿w 2转90°
a3
=
a
t B
3
l BC
=
m a n 'b3 ' l BC
?
∥BC
a B2
n ' atB3 b3'
当牵连运动为平动( w1 = 0)则无科氏加速度。
v CB = w 2 l BC
p w 2
=
v CB l BC
=
m v bc l BC
(逆)
这里用速度影像求vD
选重合点:E(E4、E5)
VC
VD d
VB
b
矢量方程图解法作速度加速度分析
青 岛 滨 海 学 院 教 师 教 案 课 题 教 学 目 的 要 求 教 学 重 点 教 学 难 点
C B A
A BC
大小 ? √ ? 方向 √ √ √
P
A BC
大小 √ √ ? 方向 √ √ ? 二、同一构件上两点之间的速度和加速度关系 已知:四杆机构 ABCDE 机构的位置如图所示,各个构件的长度已知,原 动件 1 的角速度 1 ,求: VC 、 VE 、 a C 、 a E 、 2 、 3 、 2 、 3 ?
青 岛 滨 海 学 院 教 师 教 案
解:1、求速度和角速度
VC VB VCB
大小 ? lABω ? 方向 ⊥CD ⊥AB ⊥BC → VC
VE VB VEB VC VEC
大小 方向 ?
1l AB ?
√
? → VE
? √
⊥BE √ ⊥EC
2
VCB V , 方向:顺时针 3 C ,,逆时针 (方向判定采用矢量平移) l BC lCD
4
2
4 2 a EC l EC 2 2
∴ aCB : a EB : a EC lCB : l EB : l EC
∴ bc : be : ce BC : EB : EC 即 bce 和 BCE 相似, 称 bce 为
BCE 的加速度影像。 注意:只用于同一构件上。 小结:首先讲解上次作业中出现问题较多的部分;然后讲授矢量方程图解 法的基本原理和作图方法,接着用例题讲解了同一构件上两点之间的速度和加 速度关系的求解方法和步骤。 作业:P44 3-6 (利用 3-6 原题的已知条件,采用这节课讲解的矢量方
机械原理——第3章 运动分析
机构的运动分析 3.2速度瞬心 1、直接观察法(两构件以运动副相联) 适用于求通过运动副直接相联的两构件瞬 法 心位置 瞬心定义
瞬心确定
1 P12 2 1 P12 2 ∞
1
2 P12 t
n 1 2 t
V12
n
机构的运动分析 3.2速度瞬心
法 瞬心定义 瞬心确定 2、三心定律(两构件间没有构成运动副) 三个彼此作平面运动的构件共有三个 瞬心,且它们位于同一条直线上。三心定 律特别适用于两构件不直接相联的场合。
VP24
P24
2 P12
ω2
1
ω4
VP24=μ l(P24P12)· 2 ω
P14
VP24=μ l(P24P14)· 4 ω ω 4 =ω 2·(P24P12)/ P24P14 方向: 顺时针, 与ω2相同
机构的运动分析 3.2速度瞬心 已知构件2的转速ω 2,求构件3的角速度ω 3 法 解: 用三心定律求出P23 nபைடு நூலகம்瞬心定义 2 求瞬心P23的速度 : 瞬心确定
P24 P12 1
P14 2 P23 3
4
P34
P13
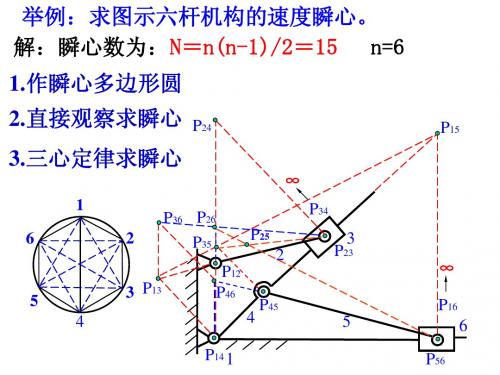
机构的运动分析 3.2速度瞬心 举例:求曲柄滑块机构的速度瞬心
法 瞬心定义 瞬心确定 解:瞬心数为:K=N(N-1)/2=6 K=6
1.作瞬心多边形(圆)
2.直接观察求瞬心(以运动副相联) 3.三心定律求瞬心(构件间没有构成运动副) P13
1 ∞
2
P45
P23
3 ∞ P16
5
5 P56
6
机构的运动分析 3.2速度瞬心 1.求线速度 法 已知凸轮转速ω1,求推杆的速度 瞬心定义 解: 瞬心确定 ①直接观察求瞬心P13、 P23 应用 ②根据三心定律和公法线 3 P23 n-n求瞬心的位置P12 2 ③求瞬心P12的速度
机械原理矢量方程图解法

2。加速度分析
加速度分析必须在速度分析之后进行
p'b' aB
a aC a p'c' (m s2 )
b'n' 22lBC a
2
aCt B l BC
a n'c'
l BC
(逆)
aD
aB
a
n DB
a
t DB
大小 ? 22l BD 2l BD
方向 ?
D B BD
加速度多边形的特点
1)由极点p’向外放射的矢量代表构 件相应点的绝对加速度。
' 5
l DF
方向:顺时针
重合点的选取:
重合点的选取应能使所列矢
量方程具有足够的已知要素并能
求解,为此可考虑将构件扩大, 包含所选的重合点。 如左图:
若取C(C2、C3)为重合点: 则:
VC2 VC3 VC2C3
ቤተ መጻሕፍቲ ባይዱ?0
?
?V
V
若取B(B2、B3)为重合点:
则:VB2 VB3 VB2B3
V?
?
3)速度影像:速度多边形上的三角形bcd与 机构简图上的三角形BCD相似,且三角 形bcd是三角形BCD沿构件2的角速度方 向转90度的相似三角形,字母的顺序也 一致。速度影像适用于求同一构件上其 它点的速度。
4)构件 2 角速度的确定
大小:
2
VCB lBC
V bc
lBC
方向: 将bc移到机构简图的C点,根据bc 绕 B点转动的方向确定。
选重合点:E(E4、E5)
vE5 vE4 vE5E4 大小 ? ? ?
选重合点:D(D4、D5) 方向 EF ?
// EF
机械原理 第3章 平面机构的运动分析
VD5 = VD4+ VD5D4 大小 ? √ ?
方向 ⊥DF √ ∥移动方向
ω5= VD5/LDF
aD5
= aD5n +
a
t D5
=aD4
+
aD5D4k (哥氏加速度) +
aD5D4r
大小 ω52* LDF ? √ 2ω4* VD5D4
?
方向
√ D→F ⊥DF
VD5D4方向沿ω4转过900
∥移动方向
二.实例分析
1、矢量方程图解法的基本原理和作法 原理:相对运动原理 方法:对矢量方程进行图解 1)同一构件上两点间速度和加速度的关系 同一构件上一点的运动可看成是随该构件上另 一点的平动和绕该点的转动的合成。
VB=VA+VBA aB=aA+aBAn+aBAt
1 同一构件两点间的和关系
构件2:已知B和B
1)去除局部自由度; 2)剔除虚约束;(D?)
3)正确确定运动副的数目; 4)构件编号; 5) 列式计算 • F=3×5-2×6-1×2
•用速度瞬心作机构的速度分析
•用矢量方程图解法作机构的速度分 析及加速度分析
第三章 平面机构的运动分析
3-1 平面机构运动分析的任务目的和方法 平面机构的运动分析是指 :
已知原动件的运动规律、机构尺寸,求其 它构件上某点的运动(s、v、a)
方法:
1 、图解法 特点: 形象直观,精度低,用于求个别
位置的运动特性
VC = VB + VCB
大小 ? √
?
方向∥X-X ⊥AB ⊥BC
设速度比例尺,作速度图,
设p(小写)为速度极点,
速度极点的速度为零。
机械原理 西工大第八版第3.2节 用矢量方程图解法作运动分析

a
k
B3B2
2vB3B22
无科氏加速度的四种情况 (1)1、3、4重合; (2)B处在最高、低点; (3)1、3垂直,
三、机构运动分析中应注意的若干问题
1.建立速度或加速度向量方程时,一定要从已知速度 或加速度的点开始列方程 重合点的选取原则 ——选已知参数较多的点 (一般为铰链点)
C A 1 2
n5 G 5 B ω1 A 6 1 D p c V E5E4 e5 e′ 5 c′ n2 k E 4 C 2 3 e 2 (e 4 ) e 2′ (e′ 4 ) n3 b′ b p′
解:1)取μL,画出机构图如图 2)计算F:F=3×5-2×7=1 等于原动件数,可解。 3)结构分析:机构由机架和原动件、Ⅱ级杆组2-3、Ⅱ级 杆组4-5组成。 4)Ⅱ级杆组2-3的运动分析: 速度分析: VC = VB + VCB 大小 ? ω1LAB ? 方向 ⊥CD ⊥AB ⊥CB
方向计量为正。
举例:已知四杆机构各杆长度和θ1,ω1,确定构件1在回转一周的过程中 每 隔30o 时构件2、3的方位角θ2、θ3 , 角速度ω2、ω3 , 角加速度α2、α3。
解:将封闭矢量方程式 :
i1
第三章
平面机构的运动分析
l1 l2 l3 l4 0 表示为复数形式,有
2.加速度分析:
B3 点 的 aB3 由 B2 的 牵 连 加 速 度 aB2 、 相 对 加 速 度 arB3B2 、 科 氏 加 速 度 akB3B2
=2ω2×VB3B2组成。即 anB3 + atB3 = anB2 + atB2 + arB3B2 + akB3B2 大小 ω32LBC ? ω12LAB 0 ? 2ω2VB3B2 方向 B→C ⊥BC B→A ∥BC VB3B2 沿ω3转90 取定极点Pˊ及比例尺μa。图解如图得: arB3B2 = μa· kb3ˊ m/s2 方向 k→b3ˊ atB3 =α3LBC =μa· n3b3ˊ m/s2 方向 n3→b3ˊ α3 = atB3/LBC 1/s2 转向 ccw(按atB确定)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§3-2 用图解法作机构的运动分析
1.矢量方程图解法
(1)矢量方程图解法的基本原理 理论力学中的运动合成原理 (2)矢量方程图解法的作法 在对机构进行速度和加速度分析时,首先根据运动合成原理 列出机构运动的矢量方程,然后再按方程作图求解 两构件以转动副相连时,在转动副中心处具有相同的速度和
加速度,两构件以移动副相连时,两构件具有相同的角速度和角
§3-2 用图解法作机构的运动分析
3.利用两构件重合点间的速度及加速度矢量方程作图求解 运动合成原理:构件i在重合点的运动可认为是随同构件j在重 合点的运动和构件i相对于构件j的相对运动的合成
重合点选取原则:选已知参数较多的点(一般为铰链点),
为此有时应将构件扩大至所选取的重合点 (1) 列矢量方程并分析各矢量 (2)选取适当比例尺按方程作速度多边形及加速度多边形图 (3)根据作图求解 (4)科氏加速度存在的条件
§3-2 用图解法作机构的运动分析
机构运动的图解法分析包括对机构的位置、速度和加速度的 分析。由于机构的位置图解分析实际上是按给定的机构尺寸及原 动件的位置作出其机构运动简图,在第2章已作介绍,所以本节 主要介绍机构的速度和加速度分析的图解法
一、机构速度及加速度分析的一般图解法
机构的速度及加速度分析的一般图解法为矢量方程图解法, 又称相对运动图解法
科氏加速度存在的条件
当两构件构成移动副,若移动方向无转动分量即只作平动时, 无科氏加速度; 当两构件构成移动副,若移动方向含有转动分量时,存在断
科氏加速度 3
2 2 3 2
2 3
3
大小:√ ?√√
方向:√ √ ?
?
方向:√ √ ? √
B
B
A D
C
A D
C
§3-2 用图解法作机构的运动分析
2.利用同一构件上两点间的速度和加速度矢量方程作图求解
运动合成原理:同一构件上任意一点的运动可认为是随该构 件上基点作平动与绕基点作相对转动的合成 (1) 列矢量方程并分析各矢量 (2)选取适当比例尺按方程作速度多边形及加速度多边形图 (3)根据作图求解 (4)速度及加速度影像
加速度
§3-2 用图解法作机构的运动分析
(3)矢量图的画法
D A B C
大小:? √ √ 方向:? √ √ √ √
D A B C
大小:√ 方向:√ ? ? √ √ √ √
B A
D
B
CADC来自§3-2 用图解法作机构的运动分析
D A B C
大小:√ √ √ √
D A B C