哈工大机械原理大作业三上传版
(完整word版)哈工大机械原理大作业3齿轮传动设计
4、滑移齿轮变速传动中每对齿轮几何尺寸及重合度的计算
4.1滑移齿轮5和齿轮6
序号
项目
代号
计算公式及计算结果
1
齿数
齿轮5
17
齿轮6
39
2
模数
2
3
压力角
20°
4
齿顶高系数
1
5
令 =4
则可得定轴齿轮传动部分的传动比为 = =6.4667
滑移齿轮传动的传动比 = =2.308
= =2.857
定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为
3、齿轮齿数的确定
根据滑移齿轮变速传动系统中对齿轮齿数的要求,选择齿轮5、6为标准齿轮,7、8、9和10为角度变位齿轮。设 17, = 39满足传动比,由于是标准齿轮,可得中心距a=76mm ,h*a=1, =17,因此不会发生根切,开始设计下面的角度变位。
顶隙系数
0.25
6
标准中心距
= ( )/2=56
7
实际中心距
56
8
啮合角
9
变位系数
齿轮5
0
齿轮6
0
10
齿顶高
齿轮5
2mm
齿轮6
2mm
11
齿根高
齿轮5
2.5mm
齿轮6
2.5mm
12
分度圆直径
齿轮5
34mm
齿轮6
78mm
13
齿顶圆直径
齿轮5
38mm
齿轮6
82mm
14
齿根圆直径
哈工大机械原理大作业331

Harbin Institute of Technology大作业设计说明书课程名称:机械原理设计题目:齿轮传动设计院系:机械设计制造及其自动化班级:设计者:学号:指导教师:丁刚设计时间:2014.5.21哈尔滨工业大学一、设计题目机构运动简图机械传动系统原始参数序号电机转速(r/min)输出轴转速(r/min)带传动最大传动比滑移齿轮传动定轴齿轮传动最大传动比模数圆柱齿轮圆锥齿轮一对齿轮最大传动比模数一对齿轮最大传动比模数121450 44 49 57 ≤2.5 ≤4 2 ≤4 3 ≤4 3 二、传动比的分配计算电动机转速n=1450r/min,输出转速n1=44 r/min,n2=49 r/min,n3=57 r/min,带传动的最大传动比=2.5,滑移齿轮传动的最大传动比=4,定轴齿轮传动的最大传动比=4。
有传动系统原始参数可知:112233145032.9544145029.9549145025.4357ioioioninninnin=========传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。
设带传动的传动比为m ax p i ,滑移齿轮的传动比为321v v v i i i ,定轴齿轮传动的传动比为f i ,则总传动比fv p f v p f v p i i i i i i i i i i i i 3max 32max 21max 1=== 其中令max 1v v i i ==4则可得定轴齿轮传动部分的传动比为1max max 32.953.2952.54f p v i i i i ===⨯滑移齿轮传动的传动比22max 29.953.642.53.295v p fi i i i ===⨯33max 25.433.092.53.295v p fi i i i ===⨯定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为1.49d i =三.齿轮齿数的确定101982763543.593.09v v v z i z z i z z i z ======令9z =17,则10z =68,为了使传动质量更好,取10z =69.78277910v z z i z z z z +=+≈+,7z =19则取8z =67 56355910v z z i z z z z +=+≈+,5z =21则取6z =65齿顶高系数*a h =1,径向间隙系数*c =0.25,分度圆压力角α=20°,实际中心距'α=86mm 。
哈工大机械原理大作业
H a r b i n I n s t i t u t e o f T e c h n o l o g y大作业设计说明书课程名称:机械原理设计题目:凸轮机构院系:机电学院班级:姓名:学号:指导教师:丁刚设计时间:2014.5.29哈尔滨工业大学1.设计题目第31题:升程/mm 升程运动角/。
升程运动规律升程许用压力角/。
回程运动角/。
回程运动规律回程许用压力角/。
远休止角/。
近休止角/。
150 90 等加等减速40 80 余弦加速度70 40 1502.运动方程式及运动线图由题目要求凸轮逆时针旋转(1)确定凸轮机构推杆升程、回程运动方程,并绘制推杆位移、速度、加速度线图。
升程第一段:(0 <φ< pi /4)φ0=pi/2;s1 = 73*φ^2;v1=146*w*φ;a1 = 146*w^2;升程第二段:(pi/4 <φ< pi /2)s2 =90-73*(pi/2-φ)^2;v2=146*w*( pi/2-φ);a2 =-146*w.^2;远休止程:(pi/2 <φ< 10*pi/9)s3 = 90;v3 = 0;a3 = 0;回程:(10*pi/9)< φ< ( 14*pi/9)s4 =45*(1+cos(9/4*(φ-10*pi/9)));v4 =-101.25*w*sin(9/4*(φ-10*pi/9)) ;a4 =-227.8*w^2* cos(9/4*(φ-10*pi/9)); 近休止程:(14*pi/9)< φ < ( 2*pi);s5 =0;v5 =0;a5 =0;1.由上述公式通过编程得到位移、速度、加速度曲线如下:(编程见附录).基圆半径为r0 = (50^2+100^2)0.5=112mm,偏距e = 50mm。
3.凸轮实际轮廓,理论轮廓,基圆,偏距圆绘制4.整体图像附录1.求位移、速度、加速度的程序(matlab)w = input('请输入W=');x = 0:(pi/1000):(pi/4);s1 = 73*x.^2;v1=146*w*x;a1 = 146*w.^2;y = (pi/4):(pi/1000):(pi/2);s2 =90-73*(pi/2-y).^2;v2=146*w*( pi/2-y);a2 =-146*w.^2;z = (pi/2 ):(pi/1000):(10*pi/9);s3 = 90;v3 = 0;a3 = 0;c = (10*pi/9):(pi/1000):( 14*pi/9);s4 =45*(1+cos(9/4*(c-10*pi/9)));v4 =-101.25*w*sin(9/4*( c-10*pi/9)) ;a4 =-227.8*w.^2* cos(9/4*(c-10*pi/9));d=(14*pi/9):(pi/1000):( 2*pi);s5 =0; v5 =0; a5 =0;subplot (2,2,1)plot(x,s1,'b',y,s2,'b',z,s3,'b',c,s4,'b', d,s5,'b');xlabel('转角/rad')ylabel('位移/(mm/s)')title('位移与转角曲线')grid onsubplot (2,2,2)plot(x,v1,'g',y,v2,'g',z,v3,'g ',c,v4,'g', d,v5,'g')ds4 =45*9/4*sin(9/4*(c-10*pi/9));d=(14*pi/9):(pi/1000):( 2*pi);s5 =0;ds5 =0;plot(ds1,s1,'b',ds2,s2,'b',ds3,s3,'b',ds4,s4,'b',ds5,s5,'b'); xlabel('ds/dp');ylabel('(位移s/mm)')title('ds/dp 与位移s曲线')grid onhold onx3=-150:0.001:0;y3 = 0.577*x3;plot (x3,y3,'r');hold onx1=-150:0.001:150;for i=1:1:250;k1=(s1(i+1)-s1(i))/ (ds1(i+1)-ds1(i));if(k1>=-1.733 && k1<=-1.731)y1=k1*(x1-ds1(i))+s1(i);plot (x1,y1,'r');end3.确定滚子半径(1)先求凸轮理论轮廓曲线,程序如下:Clc;clear;w = input('请输入w=');s0 = 100;s = 90;e = 50; x = 0:(pi/100):(pi/4);x1 = (s + s0)*cos(x)-e*sin(x);y1 = (s0 + s)*sin(x) - e*cos(x);y = (pi/4):(pi/100):(pi/2);x2 = (s + s0)*cos(y)-e*sin(y);y2 = (s0 + s)*sin(y) - e*cos(y);z = (pi/2 ):(pi/100):(10*pi/9);x3 = (s + s0)*cos(z)-e*sin(z);y3 = (s0 + s)*sin(z) - e*cos(z);c = (10*pi/9):(pi/1000):( 14*pi/9);x4 = (s + s0)*cos(c)-e*sin(c);y4 = (s0 + s)*sin(c) - e*cos(c);d=(14*pi/9):(pi/1000):( 2*pi);x5 = (s + s0)*cos(d)-e*sin(d);y5 = (s0 + s)*sin(d) - e*cos(d);plot(x1,y1,'b',x2,y2,'b',x3,y3,'b',x4,y4,'b',x5,y5,'b');xlabel('x/mm')ylabel('y/mm')title('理论轮廓曲线')grid on(2)理论轮廓线最小曲率半径编程代码:由下程序结果可知pmin =81.6667这里滚子半径为 r r < pmin-ΔΔ=3~5mm;取r r=10mm;clear;clc;v=[];syms x1 x2 x3 x4 x5s0 = 100;e = 50;s1 = 73*x1.^2;t1 = (s1 + s0)*cos(x1)-e*sin(x1);y1 = (s0 + s1)*sin(x1) - e*cos(x1);tx1=diff(t1,x1);txx1=diff(t1,x1,2);yx1=diff(y1,x1);yxx1=diff(y1,x1,2);for xx1= 0:(pi/100):(pi/4);k1=subs(abs((tx1*yxx1-txx1*yx1)/(tx1^2+yx1^2)^1.5),{x1},{xx1}); v=[v,1/k1];ends2 =90-73*(pi/2-x2).^2;t2 = (s2 + s0)*cos(x2)-e*sin(x2);y2 = (s0 + s2)*sin(x2) - e*cos(x2);tx2=diff(t2,x2);txx2=diff(t2,x2,2);yx2=diff(y2,x2);yxx2=diff(y2,x2,2);for xx2=(pi/4):(pi/100):(pi/2);k2=subs(abs((tx2*yxx2-txx2*yx2)/(tx2^2+yx2^2)^1.5),{x2},{xx2});k4=subs(abs((tx4*yxx4-txx4*yx4)/(tx4^2+yx4^2)^1.5),{x4},{xx4}); v=[v,1/k4];ends5 =0;t5 = (s5 + s0)*cos(x5)-e*sin(x5);y5 = (s0 + s5)*sin(x5) - e*cos(x5);tx5=diff(t5,x5);txx5=diff(t5,x5,2);yx5=diff(y5,x5);yxx5=diff(y5,x5,2);for xx5=(10*pi/9):(pi/100):( 4*pi/3);k5=subs(abs((tx5*yxx5-txx5*yx5)/(tx5^2+yx5^2)^1.5),{x5},{xx5}); v=[v,1/k5];endpmin=min(v)4.绘制凸轮轮廓曲线clear ;clc;syms x y z c dw= input('请输入w=');n3 = diff(x3);m3 = diff(y3);xt3= subs(x3 + (r*m3)./sqrt(m3.^2+n3.^2),z,zz);yt3 = subs(y3 - (r*n3)./sqrt(m3.^2+n3.^2),z,zz);cc= (10*pi/9):(pi/1000):( 14*pi/9);s4 =45*(1+cos(9/4*(c-10*pi/9)));x4 = (s4 + s0).*cos(c)-e*sin(c);y4 = (s0 +s4).*sin(c) - e*cos(c);n4 = diff(x4);m4 = diff(y4);xt4= subs(x4 + (r*m4)./sqrt(m4.^2+n4.^2),c,cc);yt4 =subs( y4 - (r*n4)./sqrt(m4.^2+n4.^2),c,cc);dd=(14*pi/9):(pi/1000):( 2*pi);s5 =0;x5 = (s5 + s0).*cos(d)-e*sin(d);y5 = (s0 +s5).*sin(d) - e*cos(d);n5 = diff(x5);m5 = diff(y5);xt5= subs(x5 + (r*m5)./sqrt(m5.^2+n5.^2),d,dd);yt5 =subs( y5 - (r*n5)./sqrt(m5.^2+n5.^2),d,dd);plot(xt1,yt1,'b',xt2,yt2,'b',xt3,yt3,'b',xt4,yt4,'b',xt5,yt5,'b')for i=1:3601if yy(1,i)<=y0/2s(1,i)=2*h*(yy(i)./y0).^2;v(1,i)=4*h*w*yy(i)./(y0.^2);a(1,i)=4*h*w.^2./(y0.^2);elseif yy(1,i)>y0/2 && yy(1,i)<y0s(1,i)=h-2*h./y0.^2.*(y0-yy(i)).^2;v(1,i)=4*h*w*(y0-yy(i))./(y0.^2);a(1,i)=-4*h*w.^2./(y0.^2);elseif yy(1,i)>=y0 && yy(1,i)<y0+yss(1,i)=h;v(1,i)=0;a(1,i)=0;elseif yy(1,i)>=y0+ys && yy(1,i)<y0+ys+y01s(1,i)=h/2*(1+cos(pi/y01*(yy(1,i)-y0-ys)));v(1,i)=-pi*h*w/2/y01*sin(pi/y01*(yy(1,i)-y0-ys));a(1,i)=-pi^2*h*w^2/2/y01^2*cos(pi/y01*(yy(1,i)-y0-ys)); elseif yy(1,i)>=y0+ys+y01 && yy(1,i)<=360s(1,i)=0;v(1,i)=0;a(1,i)=0;subplot(2,3,5) ;plot(x,y,'r',xt,yt,eex,eey,'g',r0x,r0y,'k')%画图title('实际理论轮廓线')axis equal%使坐标轴比例相等grid on%画网格线。
哈工大机械原理大作业3
Harbin Institute of Technology机械原理大作业三课程名称:设计题目:院系:班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学大作业3 齿轮传动设计 1、设计题目1.1机构运动简图1.2机械传动系统原始参数2、传动比的分配计算由已知条件,电动机转速n=1450r/min ,输出转速n 1=27 r/min ,n 2=31 r/min ,n 3=37 r/min ,带传动最大传动比max p i =2.5,滑移齿轮传动最大传动比=4,定轴齿轮传动最大 传动比=4。
可求得:传动系统的总传动比为:11n ni == 1450/27=53.70322n ni == 1450/31=46.774 33n ni == 1450/37=39.189 传动系统的总传动比分别由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。
设带传的传送比为其最大传送比5.2max =p i ,滑移齿轮的传动比为321,,v v v i i i ,定轴齿轮传动的传动比为f i ,则总传动比由于1i > 2i > 3i ,故取1max 4v v i i ==则定轴齿轮传动部分的传动比为1max max5.37f p v i i i i ==滑移齿轮传动的传动比22max3.49v f p i i i i ==33m a x2.92v f p i i i i ==定轴齿轮传动由3对齿轮传动组成, 每对齿轮的传动比为:1.754d i ==≤3、齿轮齿数的确定滑移齿轮齿数3=v i 65622.9521z z == 2=v i 8766 3.4719z z ==1=v i 10967 3.9417z z ==齿轮7,齿轮8:719z = 866z =781()852a m z z =+=齿轮9,齿轮10:917z =1067z =此时已知条件为'a =85mm ,910211()842()ni i a m z z X X ==+=-∑mm ''arccos(cos )21.78a aαα==总变位系数:'910()0.552tan z z x inv inv ααα∑+=-=根据x ∑值和1093.94 3.0z uz ==>,按选择变位系数线图左部斜线⑤分配变位系数,得90.45x =齿轮5,齿轮6:5=21z662z =此时已知'a =85mm ,561()832a m z z =+= ''arccos(cos )23.42a a αα==100.10x =总变位系数:'65() 1.082tan z z x inv inv ααα∑+=-=根据x ∑值和652.953z u z ==>,按选择变位系数线图左部斜线④分配变位系数,得 50.5x =60.58x =定轴圆柱齿轮齿数=d i 1214111326 1.5317z z z z ===齿轮11,齿轮12:角度变位正传动。
哈工大机械原理大作业直动从动件盘形凸轮机构满分完美版哈尔滨工业大学
end
%曲率半径
dx=diff(x);
dx(36001)=0;
dy=diff(y);
dy(36001)=0;
dydx=dy./dx;
ddy=diff(dydx);
ddy(36001)=0;
ddy=ddy./dx;
~7~
xlabel('凸轮转角φ/°');
ylabel('从动件加速度 a/(mm/s^2)');
title('加速度');
subplot(2,3,4);
plot(dsdPhi,s);
axis equal
axis([-30 50 -50 30]);
hold on
plot(x1,f1,'r');
hold on
axis equal
hold on
plot(x,y,'k')
legend('理论廓线',-1);
hold on
%轮廓图
%实际廓线
%理论廓线
~8~
哈尔滨工业大学
直动从动件盘型凸轮机构设计说明书
plot(x0,y0,':')
hold on
%基圆
plot(xe,ye,'k:')
%偏距圆
legend('实际廓线','理论廓线','基圆','偏距圆',-1);
subplot(2,3,1);
plot(Phi,s);
grid on
axis([0 360 0 27]);
机械原理课程设计大作业
机械原理课程设计大作业菠萝削皮机专业:机械设计制造及其自动化摘要本设计产品提供一种手摇立式菠萝削皮机,主要包括托盘、刀架、顶针架、V 型刀片、手柄或小型发动机、以及机械系统,包括传动系统、装夹系统、切削系统。
其中传动系统由直齿圆锥齿轮(14)与进给螺纹套管(13)固连,通过摇动手柄(18)和变速齿轮机构(17)将动力经直齿圆锥齿轮(15)与进给螺纹管道(13)组成的传递机构将动力传给的刀具夹紧法兰盘(12)从而带动刀具旋转;装夹系统由上顶钉及对顶螺母(3),下顶钉(5)组成;切削系统由刀架和V型刀具(6、7)以及刀片(16)组成。
该削皮机使用方便,安全可靠,切削菠萝和皮根效率高。
目录一、题目复述二、设计方案及结构图三、机械系统四、主要结构件参数五、设计总结和补充六、参考书目一、题目复述菠萝是人们普遍喜爱的一种热带水果。
菠萝虽好吃,但皮难削。
由于菠萝的皮为花苞片状的硬皮,并呈现螺旋状的排列,而且每个花苞片上面都有一个较深的“果眼”或“黑芯”。
通常,人们手工削菠萝皮的做法:一种是用锋利的水果刀先削去菠萝上的全部花苞片硬皮,然后再逐个挖去菠萝上残留的全部“果眼”;另一种是利用特制的U 型刀沿着菠萝花苞片和“果眼”排列的螺旋方向挖出一条深“沟”,连皮带“眼”一块去掉,需逐条螺旋线方向挖“沟”才能完成。
所以手工削皮不仅费时费力,不安全,不卫生,而且对菠萝果肉的浪费也较大。
虽目前市面上有一些水果削皮机的产品,但都不适合于菠萝水果削皮的需要。
因此,为了满足家庭、酒店、水果店或果贩使用,现需设计一种手动式或电动菠萝削皮装置。
图8.1菠萝表面的花苞片及“果眼”的分布形状如图1所示。
菠萝通常呈现未对称性的左右螺旋线排列,左右螺旋线的螺旋线的螺旋升角均约为40,每条螺旋线上的果眼数为7-12个,每个菠萝的螺旋线数为8条,而菠萝的高度与其直径之比为1.5左右,其高度一般在170mm——280mm范围之内。
我们根据市场商场见菠萝的大小以及其表面特性将其归类:二、设计方案及结构图我们经讨论及实验以后采用“V”型刀具剔除果眼及外表皮,对于未长果眼的部分则采取普通刀片(双向)切削方法去除。
哈工大机械原理大作业——齿轮——1号
Harbin Institute of Technology机械原理大作业3课程名称:机械原理设计题目:齿轮传动设计哈尔滨工业大学一、设计题目:如下图一个机械传动系统,运动运动由电动机1输入,经过机械传动系变速后由圆锥齿轮16输出三种不同转速。
选择一组传动系统的原始参数,据此设计该传动系统。
序号电机转速〔r/min〕输出轴转速〔r/min〕带传动最大传动比滑移齿轮传动定轴齿轮传动最大传动比模数圆柱齿轮圆锥齿轮一对齿轮最大传动比模数一对齿轮最大传动比模数7 1450 17 23 30 ≤2.8 ≤4.5 2 ≤4.5 3 ≤4 3二、传动比的分配计算:电动机转速n=1450r/min,输出转速n1=17r/min,n2=23 r/min,n3=30 r/min,带传动的最大传动比=2.8,滑移齿轮传动的最大传动比=4.5,圆柱齿轮传动的最大传动比=4.5,圆锥齿轮最大传动比=4。
根据传动系统的原始参数可知,传动系统的总传动比为:i1=1450/30=48.333i2=1450/23=63.043i3=1450/17=85.294传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三局部实现。
设带传动的传动比为ipmax =2.8,滑移齿轮的传动比为iv1,iv2和iv3,令iv3=ivmax=4.5,那么定轴的传动比为if =85.294/(4.5*2.8)=6.769,从而iv1=48.333/〔6.769*2.8〕=2.550,iv2=3.326。
定轴齿轮每对的传动比为id==1.89。
三、滑移齿轮变速传动中每对齿轮的几何尺寸及重合度:经过计算、比拟,确定出三对滑移齿轮的齿数,其分别为:z5=17,z6=44,z 7=14,z8=47,z9=11,z10=50。
变位系数确实定:x5=x6=0; x7≥ha*(17-14)/17=0.176,取x7=0.18,x8=-0.18;x9≥ha*(17-11)/17=0.353,取x9=0.36;x10=-0.36。
哈工大机械原理大作业齿轮传动设计(word文档良心出品)

机械原理大作业(三)课程名称:设计题目:院系:姓名:学号:指导教师:设计时间:哈尔滨工业大学(威海)设计说明书1.设计题目 (2)2.传动比的分配计算 (3)3. 计算滑移齿轮变速传动中每对齿轮的基本几何尺寸 (3)(1)齿轮5、齿轮6 (4)(2)齿轮7、齿轮8 (4)(3)齿轮9、齿轮10 (5)4.计算定轴齿轮传动中每对齿轮的基本几何尺寸。
(5)(1)齿轮11、齿轮12 (5)(2)齿轮13、齿轮14 (6)(3)齿轮15、齿轮16 (6)5.每对齿轮的几何尺寸及重合度。
(6)7.实际设计参数 (14)1.设计题目如图所示一个机械传动系统,运动由电动机1输入,经过机械传动系统变速后由圆锥齿轮16输出三种不同的转速。
根据表中的传动系统原始参数设计该传动系统。
1.15,16.圆锥齿轮表机械传动系统原始参数2.传动比的分配计算电动机转速ni=1450r/min,输出转速n1=12r/min,n2=17r/min,n3=23r/min,带传动的最大传动比idmax=2.5,滑移齿轮传动的最大传动比ihmax=4,定轴齿轮传动的最大传动比ifmax=4。
根据传动系统的原始参数可知,传动系统的总传动比为i1=nin1=1450÷12=120.833i2=nin2=1450÷17=85.294i3=nin3=1450÷23=63.043传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。
设带传动的传动比为id,滑移齿轮的传动比为ih1、ih2和ih3,定轴齿轮传动的传动比为if,则总传动比i1=id*ih1*ifi2=id*ih2*ifi3=id*ih3*if令=ih1=ihmax=4则可得:定轴齿轮传动部分的传动比为if=i1/(id*ih1)=120.833/(2.5*4)=12.083滑移齿轮传动的传动比ih2=i2/(id*if)=85.294/(2.5*12.083)=2.824Ih3=i3/(id*if)=63.043/(2.5*12.083)=2.087定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为iv*iv*iv=if=12.083,iv=2.2953.计算滑移齿轮变速传动中每对齿轮的基本几何尺寸根据滑移齿轮变速传动系统中对齿轮齿数的要求,选择齿轮5、6、7、8、9和10为角度变位齿轮。
哈工大机械原理大作业19齿轮.docx
机械原理大作业(三)作业名称:齿轮传动设计设计题目:院系:机电工程学院班级:1108108设计者:许彬彬学号:1110810816指导教师:林琳设计时间:2013年6月1日哈尔滨工业大学机械设计1、设计题目 1.1机构运动简图1.2机械传动系统原始参数电动机转速min /1450r n =,输出转速min/4001r n =,m in /3502r n =,m in /3003r n =,带传动的最大传动比5.2m ax =p i ,滑移齿轮传动的最大传动比4m ax =v i ,定轴齿轮传动的最大传动比4m ax =d i 。
根据传动系统的原始参数可知,传动系统的总传动比为:25.36401450011===n n i43.41351450022===n n i33.48301450033===n n i传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。
设带传动的传动比为5.2m ax =p i ,滑移齿轮的传动比为321v v v i i i 、、,定轴齿轮传动的传动比为f i,则总传动比f v p i i i i 1m ax 1= f v p i i i i 2max 2= fv p i i i i 3max 3= 令4max 3==v v i i则可得定轴齿轮传动部分的传动比为833.44*5.233.48max max 3===v p f i i i i滑移齿轮传动的传动比为000.3833.4*5.225.36max 11===fp v i i i i429.3833.4*5.243.41max 22===fp v i i i i设定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为4691.1833.4max 33=≤===d f d i i i 3、齿轮齿数的确定根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、8、9和10为角度变位齿轮,其齿数:37,9,35,10,33,111098765======z z z z z z ;它们的齿顶高系数1=*a h ,径向间隙系数25.0=*c ,分度圆压力角020=α,实际中心距mm a 46'=。
哈工大—机械原理凸轮大作业
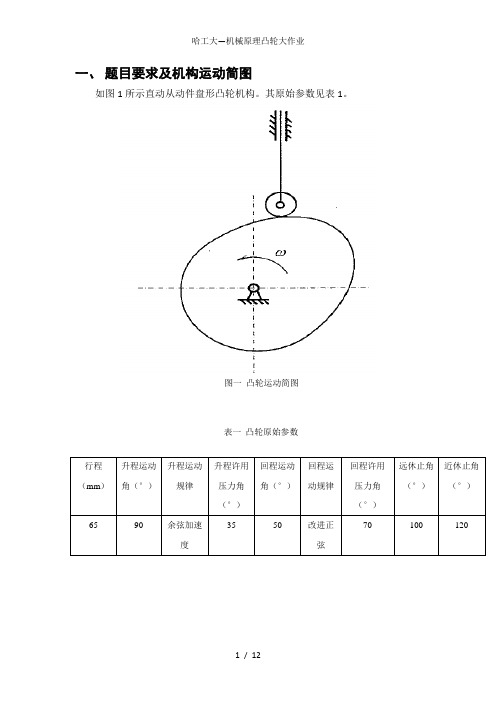
一、题目要求及机构运动简图如图1所示直动从动件盘形凸轮机构。
其原始参数见表1。
图一凸轮运动简图表一凸轮原始参数二、计算流程框图凸轮机构分析建立数学模型位移方程速度方程加速度方程速度线图位移线图加速线图ds/dΨ-s曲线升程压力角回程压力角确定轴向及基圆半径压力角图确定滚子半径实际轮廓理论轮廓轮廓图结束三、建立数学模型1.从动件运动规律方程首先,由于设计凸轮轮廓与凸轮角速度无关,所以不妨设凸轮运动角速度为w = 1rad/s。
(1)推程运动规律(0 < φ < 90°)s=h2×[1−cos(πφ0×φ)]v=πhw2φ0×sin(πφ0×φ)a=π2ℎw22φ02×cos(πφ0×φ)式中:h=65mm,Φ0=π/2(2)远休程运动规律(90°< φ < 190°)s = 65mmv = 0a = 0(3)回程运动规律(190°< φ < 240°)s1=h−h4+π∗(π∗(φ−φ0−φs)φ0′−sin(4∗π∗φ−φ0−φsφ0′)4)(190°< φ < 196.25°)s2=h−h4+π∗(2+π∗(φ−φ0−φs)φ0′−9∗sin(π3+4∗π∗φ−φ0−φs3∗φ0′)4)(196.25°< φ < 233.75°)s3=h−h4+π∗(4+π∗(φ−φ0−φs)φ0′−sin(4∗π∗φ−φ0−φsφ0′)4)(233.75°< φ < 240°)回程运动中的速度和加速度为位移对时间t的倒数:v=ds dta=dv dt(4)近休程运动规律(240°< φ < 360°)s = 0v = 0a = 02.从动件位移、速度、加速度线图(1)位移线图(2)速度线图(3)加速度线图(4)位移、速度、加速度线图MATLAB源程序%% 已知条件h = 65; %mmphi_0 = 90./180*pi; %radalpha_up_al = 35./180*pi; %升程许用压力角phi_00 = 50./180*pi;alpha_down_al = 70./180*pi; %回程许用压力角phi_s = 100./180*pi;phi_ss = 120./180*pi;w = 1;%% 绘制从动件位移、速度、加速度线图% 推程阶段t_up = 0 : 0.5 : 90;t_up1 = t_up./180*pi;syms t_up1phi_up s_up v_up a_upphi_up = w.*t_up1;s_up = h./2.*(1 - cos(pi.*phi_up./phi_0));v_up = diff(s_up,t_up1);a_up = diff(v_up,t_up1);s_up1 = double(subs(s_up,t_up./180*pi));v_up1 = double(subs(v_up,t_up./180*pi));a_up1 = double(subs(a_up,t_up./180*pi));% 远休程t_s = 90 : 0.5 : (90+100);t_s1 = t_up./180*pi;s_s(1:201) = h;v_s(1:201) = 0;a_s(1:201) = 0;% 回程阶段1t_down1 = (90+100) : 0.5 : (90+100+50/8);t_down11 = t_down1./180*pi;syms t_down11phi_down1s_down1v_down1a_down1phi_down1 = w.*t_down11;s_down1 = h - h./(4+pi).*(pi.*(phi_down1 - phi_0 - phi_s)./phi_00 - ...sin(4.*pi.*(phi_down1 - phi_0 - phi_s)./phi_00)./4);v_down1 = diff(s_down1,t_down11);a_down1 = diff(v_down1,t_down11);s_down11 = double(subs(s_down1,t_down1./180*pi));v_down11 = double(subs(v_down1,t_down1./180*pi));a_down11 = double(subs(a_down1,t_down1./180*pi));% 回程阶段2t_down2 = (90+100+50/8) : 0.5 : (90+100+7*50/8);t_down22 = t_down2./180*pi;syms t_down22phi_down2s_down2v_down2a_down2phi_down2 = w.*t_down22;s_down2 = h - h./(4+pi).*(2+pi.*(phi_down2 - phi_0 - phi_s)./phi_00 - 9.*sin(pi./3 + 4.*pi.*(phi_down2 - phi_0 - phi_s)./(3.*phi_00))./4);v_down2 = diff(s_down2,t_down22);a_down2 = diff(v_down2,t_down22);s_down22 = double(subs(s_down2,t_down2./180*pi));v_down22 = double(subs(v_down2,t_down2./180*pi));a_down22 = double(subs(a_down2,t_down2./180*pi));% 回程阶段3t_down3 = (90+100+7*50/8) : 0.5 : (90+100+50);t_down33 = t_down3./180*pi;syms t_down33phi_down3s_down3v_down3a_down3phi_down3 = w.*t_down33;s_down3 = h - h./(4+pi).*(4+pi.*(phi_down3 - phi_0 - phi_s)./phi_00 - …sin(4.*pi.*(phi_down3 - phi_0 - phi_s)./phi_00)./4);v_down3 = diff(s_down3,t_down33);a_down3 = diff(v_down3,t_down33);s_down33 = double(subs(s_down3,t_down3./180*pi));v_down33 = double(subs(v_down3,t_down3./180*pi));a_down33 = double(subs(a_down3,t_down3./180*pi));% 近休程t_ss = (90+100+50) : 0.5 : 360;s_ss(1:241) = 0;v_ss(1:241) = 0;a_ss(1:241) = 0;% 绘图位移t = [t_up t_s t_down1 t_down2 t_down3 t_ss];phi = w .* t ./ 180 .*pi;s = [s_up1 s_s s_down11 s_down22 s_down33 s_ss];v = [v_up1 v_s v_down11 v_down22 v_down33 v_ss];a = [a_up1 a_s a_down11 a_down22 a_down33 a_ss];figure('Name','从动件位移-时间线图');plot(t,s,'k','linewidth',1.0);grid on;title('从动件位移-时间线图');xlabel('转角\phi / 度');ylabel('位移h/mm');% 绘图速度figure('Name','从动件速度-时间线图');plot(t,v,'k','linewidth',1.0);grid on;title('从动件速度-时间线图');xlabel('转角\phi / 度');ylabel('速度v/mm*s^{-1}');% 绘图加速度figure('Name','从动件加速度-时间线图');plot(t,a,'k','linewidth',1.0);grid on;title('从动件加速度-时间线图');xlabel('转角\phi / 度');ylabel('加速度a/mm*s^{-2}');3.绘制ds/dΦ线图并确定基圆半径和偏距(1)绘制ds/dΦ线图及源程序①MATLAB源程序:%% 绘制ds/dphi-s线图,确定基圆半径和偏距ds_dphi = v ./ w;figure('Name','凸轮ds/dphi - s线图');plot(ds_dphi,s,'k','linewidth',1.5);hold on;axis([-150 150 -70 70]);grid on;title('凸轮ds/dphi - s线图');xlabel('ds/dphi / (mm*s^{-2})');ylabel('s/mm');% 三条临界线x = linspace(-150,150,301);k_up = tan(pi/2 - alpha_up_al);y_up = k_up.*x - 66;plot(x,y_up,'linewidth',1.5);k_down = - tan(pi/2 - alpha_down_al);y_down = k_down.*x - 24.7;plot(x,y_down,'linewidth',1.5);x0 = linspace(0,150,151);k0 = - tan(alpha_up_al);y0 = k0.*x0;plot(x0,y0,'--');% 由图像选取凸轮基圆半径为r0 = sqrt(23^2 + 34^2) = 41 mm,偏距e = 23mm plot(23,-34,'or');r0 = 41;e = 23;plot(linspace(0,23,10),linspace(0,-34,10),'r',linspace(0,23,10),linspace(-34,-34,10),'r',li nspace(23,23,10),linspace(0,-34,10),'r','linewidth',1.0);(2)确定基圆半径和偏距在凸轮机构的ds/d φ-s 线图里再作斜直线Dt-dt 与升程的[ds/d φ-s]曲线相切并使与纵坐标夹角为升程许用压力角[α],则Dt-dt 线的右下方为选择凸轮轴心的许用区。
(完整word版)哈工大机械原理大作业凸轮DOC
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业二课程名称:机械原理设计题目: 凸轮机构设计院系:班级:设计者:学号:指导教师:哈尔滨工业大学一、设计题目如右图所示直动从动件盘形凸轮机构,选择一组凸轮机构的原始参数,据此设计该凸轮机构。
凸轮机构原始参数序号升程(mm)升程运动角升程运动规律升程许用压力角27130150正弦加速度30°回程运动角回程运动规律回程许用压力角远休止角近休止角100°余弦加速度60°30°80°二. 凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图凸轮推杆升程运动方程:)]512sin(2156[130s ϕππϕ-= )512sin(4.374)]512cos(1[156v 211ϕπϕπωω=-=a% t 表示转角,s 表示位移t=0:0.01:5*pi/6;%升程阶段s= [(6*t)/(5*pi )- 1/(2*pi )*sin(12*t/5)]*130; hold on plot(t ,s ); t= 5*pi/6:0。
01:pi; %远休止阶段s=130; hold on plot(t,s );t=pi :0.01:14*pi/9;%回程阶段s=65*[1+cos(9*(t-pi )/5)]; hold on plot(t ,s );t=14*pi/9:0.01:2*pi ;s=0;hold onplot(t,s);grid onhold off%t表示转角,令ω1=1t=0:0。
01:5*pi/6;%升程阶段v=156*1*[1-cos(12*t/5)]/pi hold onplot(t,v);t= 5*pi/6:0。
01:pi;v=0hold onplot(t,v);t=pi:0.01:14*pi/9;%回程阶段v=—117*1*sin(9*(t—pi)/5) hold onplot(t,v);t=14*pi/9:0。
机械原理大作业3 凸轮结构设计
机械原理大作业(二)作业名称:机械原理设计题目:凸轮机构设计院系:机电工程学院班级:设计者:学号:指导教师:丁刚陈明设计时间:哈尔滨工业大学机械设计1.设计题目如图所示直动从动件盘形凸轮机构,根据其原始参数设计该凸轮。
表一:凸轮机构原始参数2.凸轮推杆运动规律(1)推杆升程运动方程S=h[φ/Φ0-sin(2πφ/Φ0)]V=hω1/Φ0[1-cos(2πφ/Φ0)]a=2πhω12sin(2πφ/Φ0)/Φ02式中:h=150,Φ0=5π/6,0<=φ<=Φ0,ω1=1(为方便计算)(2)推杆回程运动方程S=h[1-T/Φ1+sin(2πT/Φ1)/2π]V= -hω1/Φ1[1-cos(2πT/Φ1)]a= -2πhω12sin(2πT/Φ1)/Φ12式中:h=150,Φ1=5π/9,7π/6<=φ<=31π/18,T=φ-7π/63.运动线图及凸轮线图运动线图:用Matlab编程所得源程序如下:t=0:pi/500:2*pi;w1=1;h=150;leng=length(t);for m=1:leng;if t(m)<=5*pi/6S(m) = h*(t(m)/(5*pi/6)-sin(2*pi*t(m)/(5*pi/6))/(2*pi));v(m)=h*w1*(1-cos(2*pi*t(m)/(5*pi/6)))/(5*pi/6);a(m)=2*h*w1*w1*sin(2*pi*t(m)/(5*pi/6))/((5*pi/6)*(5*pi/6)); % 求退程位移,速度,加速度elseif t(m)<=7*pi/6S(m)=h;v(m)=0;a(m)=0;% 求远休止位移,速度,加速度elseif t(m)<=31*pi/18T(m)=t(m)-21*pi/18;S(m)=h*(1-T(m)/(5*pi/9)+sin(2*pi*T(m)/(5*pi/9))/(2*pi));v(m)=-h/(5*pi/9)*(1-cos(2*pi*T(m)/(5*pi/9)));a(m)=-2*pi*h/(5*pi/9)^2*sin(2*pi*T(m)/(5*pi/9));% 求回程位移,速度,加速度elseS(m)=0;v(m)=0;a(m)=0;% 求近休止位移,速度,加速度endend推杆位移图推杆速度图推杆加速度图4.确定凸轮基圆半径和偏距在凸轮机构的ds/dφ-s线图里再作斜直线D t d t与升程的[d s/dφ-s(φ)]曲线相切并使与纵坐标夹角为升程许用压力角[α],则D t d t线的右下方为选择凸轮轴心的许用区。
哈工大机械原理大作业凸轮结构设计3演示教学

此文档仅供收集于网络,如有侵权请联系网站删除Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:凸轮结构设计院系:机电工程学院班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学1、设计题目序号 升程(mm ) 升程运动角(︒) 升程运动规律 升程许用压力角(︒) 回程运动角(︒) 回程运动规律 回程许用压力角(︒) 远休止角(︒) 近休止角(︒) 350150正弦加速度40100余弦加速度6030802、凸轮机构推杆升程、回程运动方程,推杆位移、速度、加速度线图。
(1)推杆各行程运动方程(设定角速度为s s rad /2/1πω==)①从动件推程运动方程(650πϕ≤≤)⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-=ϕφππφϕ002sin 21h s ⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-=ϕφπφω0012cos 1h v ; ⎪⎪⎭⎫⎝⎛=ϕφπφωπ020212sin 2h a代入数据,可得:⎪⎭⎫ ⎝⎛-=ϕππϕ4.2sin 215650s mm()ϕ4.2cos -1120=v s mm /ϕπ4.2sin 576=a 2/s mm②从动件远休程运动方程(πϕπ≤≤65) 0;50===a v mm s③从动件回程运动方程(914πϕπ≤≤) ()[]⎭⎬⎫⎩⎨⎧+-+=s h s φφϕφπ0'0cos 12()[]s h v φφϕφπφωπ+--=0'0'01sin 2 ()[]s h a φφϕφπφωπ+--=0'0'212cos 22代入数据,可得:()[]πϕ8.18.1cos 125-+=s mm ()πϕπ8.18.1sin 90--=v s mm / ()πϕπ8.18.1cos 3242--=a 2/s mm④从动件进休程运动方程(πϕπ2914≤≤) 0===a v s(2)、推杆位移、速度、加速度线图①推杆的位移线图如下②推杆的速度线图如下③推杆的加速度线图如下3、凸轮机构的ds s-线图,并依次确定凸轮的基圆半径和偏dϕ距凸轮机构的s d ds-ϕ线图如下图所示由图中范围选定点(-10,-50)为凸轮转轴O 点,则mm r 99.501050220=+=取基圆半径为r 0 =51mm ,偏距e = 10mm 。
哈工大机械原理大作业2-31
H a r b i n I n s t i t u t e o f T e c h n o l o g y大作业设计说明书课程名称:机械原理设计题目:凸轮机构院系:机电学院班级:姓名:学号:指导教师:丁刚设计时间:2014.5.29哈尔滨工业大学1.设计题目第31题:升程/mm 升程运动角/。
升程运动规律升程许用压力角/。
回程运动角/。
回程运动规律回程许用压力角/。
远休止角/。
近休止角/。
150 90 等加等减速40 80 余弦加速度70 40 1502.运动方程式及运动线图由题目要求凸轮逆时针旋转(1)确定凸轮机构推杆升程、回程运动方程,并绘制推杆位移、速度、加速度线图。
升程第一段:(0<φ<pi/4)φ0=pi/2;s1=73*φ^2;v1=146*w*φ;a1=146*w^2;升程第二段:(pi/4<φ<pi/2)s2=90-73*(pi/2-φ)^2;v2=146*w*(pi/2-φ);a2=-146*w.^2;远休止程:(pi/2<φ<10*pi/9)s3=90;v3=0;a3=0;回程:(10*pi/9)<φ<(14*pi/9)s4=45*(1+cos(9/4*(φ-10*pi/9)));v4=-101.25*w*sin(9/4*(φ-10*pi/9));a4=-227.8*w^2*cos(9/4*(φ-10*pi/9));近休止程:(14*pi/9)<φ<(2*pi);s5=0;v5=0;a5=0;1.由上述公式通过编程得到位移、速度、加速度曲线如下:(编程见附录).2.凸轮机构的线图及基圆半径和偏距的确定凸轮机构的线图如下图所示(代码详见附录):因为凸轮逆时针旋转,,所以滚子从动件右偏,但由于绘图原因,采用向左为正方向,由此确定凸轮基圆半径与偏距:基圆半径为r0=(50^2+100^2)0.5=112mm,偏距e=50mm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
哈尔滨工业大学
机械原理大作业三
齿轮传动系统设计说明书
题目:(3)
课程名称:机械原理
学院:外国语学院
姓名:XX
班号:XXX
学号:XXX
一:设计题目
二:传动比的分配计算
根据传动系统的原始参数可知,传动系统的总传动比为:
667.9615
14501
3===n n
i 048.692114502
2===n
n i 769.552614503
1===n n
i
传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。
设带传动的传动比为5.2max =p i ,滑移齿轮的传动比为321,v v v i i i 和,定轴齿轮传动的传动比为f i ,则总传动比:
f
v p i i i i 1max 1
= f
v p i i i i 2max 2
= f v p i i i i 3max 3
=
令:
4max 3
==v v i i
则可得定轴齿轮传动部分的传动比: 677.94
5.2677
.96max max 3=×==v p f i i i i
滑移齿轮传动的传动比: 305.2677
.95.2769
.55max 11
=×=
=f
p v i i i i
854.2677
.95.2048
.69max 22
=×=
=
f
p v i i i i
定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 4≤131.2677.9max 33====d f d
i i i
三:齿轮齿数的确定
根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7和8为角度变位齿轮,其齿数分别为:22,51,19,54它们的齿顶高系数为1径向间隙系数
25.0*=c ,齿轮9与10齿顶高系数为0.8,C=0.3,采用短齿。
分度圆压力角α=20°,
实际中心距75'
=a。
根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为角度变位齿轮,其齿数:42,20,42,2014
131211
====z z z z 。
它们的齿顶高系数*a h =1,径向间隙系数*
c =0.25,分度圆压力角α=20°,实际中心距93'
=a mm 。
圆锤齿轮15和16
选择为标准齿轮42,2025
15
==z z ,齿顶高系数*a h =1,径向间隙系数*c =0.2,分度圆压力
角α=20°(等于啮合角'
α)。
四:滑移齿轮变速传动中每对齿轮几何尺寸及重合度的计算
五:定轴齿轮变速传动中每对齿轮几何尺寸及重合度的计算
表4 定轴圆柱齿轮11、12参数
六:实际输出转速
016.275.24220
4220422051221450max 11=÷××××=÷××
=p f v i i i n n 03.225.24220
4220422054191450max 22=÷××××=÷××
=p f v i i i n n 657.155.225
19
2116211660151450max 33=÷××××=÷××
=p f v i i i n n。