机械原理大作业3 凸轮结构设计
机械原理凸轮机构设计
凸轮机构的设计一、简介凸轮机构是由凸轮,从动件和机架三个基本构件组成的高副机构。
凸轮是一个具有曲线轮廓或凹槽的构件,一般为主动件,作等速回转运动或往复直线运动。
与凸轮轮廓接触,并传递动力和实现预定的运动规律的构件,一般做往复直线运动或摆动,称为从动件。
凸轮机构在应用中的基本特点在于能使从动件获得较复杂的运动规律。
因为从动件的运动规律取决于凸轮轮廓曲线,所以在应用时,只要根据从动件的运动规律来设计凸轮的轮廓曲线就可以了。
凸轮机构广泛应用于各种自动机械、仪器和操纵控制装置。
凸轮机构之所以得到如此广泛的应用,主要是由于凸轮机构可以实现各种复杂的运动要求,而且结构简单、紧凑。
二、凸轮机构的工作原理由凸轮的回转运动或往复运动推动从动件作规定往复移动或摆动的机构。
凸轮具有曲线轮廓或凹槽,有盘形凸轮、圆柱凸轮和移动凸轮等,其中圆柱凸轮的凹槽曲线是空间曲线,因而属于空间凸轮。
从动件与凸轮作点接触或线接触,有滚子从动件、平底从动件和尖端从动件等。
尖端从动件能与任意复杂的凸轮轮廓保持接触,可实现任意运动,但尖端容易磨损,适用于传力较小的低速机构中。
为了使从动件与凸轮始终保持接触,可采用弹簧或施加重力。
具有凹槽的凸轮可使从动件传递确定的运动,为确动凸轮的一种。
一般情况下凸轮是主动的,但也有从动或固定的凸轮。
多数凸轮是单自由度的,但也有双自由度的劈锥凸轮。
凸轮机构结构紧凑,最适用于要求从动件作间歇运动的场合。
它与液压和气动的类似机构比较,运动可靠,因此在自动机床、内燃机、印刷机和纺织机中得到广泛应用。
但凸轮机构易磨损,有噪声,高速凸轮的设计比较复杂,制造要求较高。
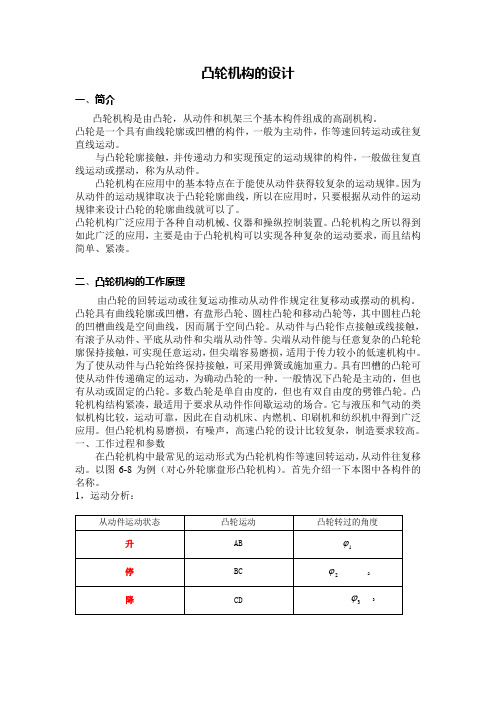
一、工作过程和参数在凸轮机构中最常见的运动形式为凸轮机构作等速回转运动,从动件往复移动。
以图6-8为例(对心外轮廓盘形凸轮机构)。
首先介绍一下本图中各构件的名称。
1,运动分析:停CA4ϕ2、参数①推程(升程)-- 从动件自最低位置升到最高位置的过程 ②推程角(升程角)--推动从动件实现推程时的凸轮转角(ϕ1) ③回程 -- 从动件自最高位置升到最低位置的过程 ④回程角 --从动件从最高位置回到最低位置时的 凸轮转角(ϕ3)⑤远停角(远休止角)从动件在最高位置停止不动,与此对应的凸轮转角。
机械原理大作业凸轮机构设计

机械原理大作业凸轮机构设计一、凸轮机构概述凸轮机构是一种常见的传动机构,它通过凸轮的旋转运动,带动相应零件做直线或曲线运动。
凸轮机构具有结构简单、运动平稳、传递力矩大等优点,在各种机械设备中得到广泛应用。
二、凸轮基本结构1. 凸轮凸轮是凸起的圆柱体,通常安装在主轴上。
其表面通常为圆弧形或其他曲线形状,以便实现所需的运动规律。
2. 跟随件跟随件是与凸轮配合的零件,它们通过接触面与凸轮相互作用,并沿着规定的路径做直线或曲线运动。
跟随件可以是滑块、滚子、摇臂等。
3. 连杆连杆连接跟随件和被驱动部件,将跟随件的运动转化为被驱动部件所需的运动。
连杆可以是直杆、摇杆等。
三、凸轮机构设计要点1. 几何参数设计设计时需要确定凸轮半径、角度和曲率半径等参数,这些参数的选择将直接影响凸轮机构的运动规律和性能。
2. 运动规律设计根据被驱动部件的运动要求,选择合适的凸轮曲线形状,以实现所需的运动规律。
3. 稳定性设计在设计凸轮机构时,需要考虑其稳定性。
例如,在高速旋转时,可能会发生跟随件脱离凸轮或者产生振动等问题,因此需要采取相应措施提高稳定性。
4. 材料和制造工艺设计在材料和制造工艺方面,需要考虑凸轮机构所承受的载荷和工作环境等因素,选择合适的材料和制造工艺。
四、几种常见凸轮机构及其应用1. 摇臂式凸轮机构摇臂式凸轮机构由摇臂、连杆和被驱动部件组成。
它通常用于实现直线运动或旋转运动,并且具有结构简单、运动平稳等优点。
摇臂式凸轮机构广泛应用于各种机械设备中,如发动机气门控制系统、纺织设备等。
2. 滑块式凸轮机构滑块式凸轮机构由凸轮、滑块、连杆和被驱动部件组成。
它通常用于实现直线运动,并且具有结构简单、运动平稳等优点。
滑块式凸轮机构广泛应用于各种机械设备中,如冲压设备、印刷设备等。
3. 滚子式凸轮机构滚子式凸轮机构由凸轮、滚子、连杆和被驱动部件组成。
它通常用于实现圆弧形运动,并且具有运动平稳、传递力矩大等优点。
滚子式凸轮机构广泛应用于各种机械设备中,如汽车发动机气门控制系统等。
哈工大机械原理大作业
H a r b i n I n s t i t u t e o f T e c h n o l o g y大作业设计说明书课程名称:机械原理设计题目:凸轮机构院系:机电学院班级:姓名:学号:指导教师:丁刚设计时间:2014.5.29哈尔滨工业大学1.设计题目第31题:升程/mm 升程运动角/。
升程运动规律升程许用压力角/。
回程运动角/。
回程运动规律回程许用压力角/。
远休止角/。
近休止角/。
150 90 等加等减速40 80 余弦加速度70 40 1502.运动方程式及运动线图由题目要求凸轮逆时针旋转(1)确定凸轮机构推杆升程、回程运动方程,并绘制推杆位移、速度、加速度线图。
升程第一段:(0 <φ< pi /4)φ0=pi/2;s1 = 73*φ^2;v1=146*w*φ;a1 = 146*w^2;升程第二段:(pi/4 <φ< pi /2)s2 =90-73*(pi/2-φ)^2;v2=146*w*( pi/2-φ);a2 =-146*w.^2;远休止程:(pi/2 <φ< 10*pi/9)s3 = 90;v3 = 0;a3 = 0;回程:(10*pi/9)< φ< ( 14*pi/9)s4 =45*(1+cos(9/4*(φ-10*pi/9)));v4 =-101.25*w*sin(9/4*(φ-10*pi/9)) ;a4 =-227.8*w^2* cos(9/4*(φ-10*pi/9)); 近休止程:(14*pi/9)< φ < ( 2*pi);s5 =0;v5 =0;a5 =0;1.由上述公式通过编程得到位移、速度、加速度曲线如下:(编程见附录).基圆半径为r0 = (50^2+100^2)0.5=112mm,偏距e = 50mm。
3.凸轮实际轮廓,理论轮廓,基圆,偏距圆绘制4.整体图像附录1.求位移、速度、加速度的程序(matlab)w = input('请输入W=');x = 0:(pi/1000):(pi/4);s1 = 73*x.^2;v1=146*w*x;a1 = 146*w.^2;y = (pi/4):(pi/1000):(pi/2);s2 =90-73*(pi/2-y).^2;v2=146*w*( pi/2-y);a2 =-146*w.^2;z = (pi/2 ):(pi/1000):(10*pi/9);s3 = 90;v3 = 0;a3 = 0;c = (10*pi/9):(pi/1000):( 14*pi/9);s4 =45*(1+cos(9/4*(c-10*pi/9)));v4 =-101.25*w*sin(9/4*( c-10*pi/9)) ;a4 =-227.8*w.^2* cos(9/4*(c-10*pi/9));d=(14*pi/9):(pi/1000):( 2*pi);s5 =0; v5 =0; a5 =0;subplot (2,2,1)plot(x,s1,'b',y,s2,'b',z,s3,'b',c,s4,'b', d,s5,'b');xlabel('转角/rad')ylabel('位移/(mm/s)')title('位移与转角曲线')grid onsubplot (2,2,2)plot(x,v1,'g',y,v2,'g',z,v3,'g ',c,v4,'g', d,v5,'g')ds4 =45*9/4*sin(9/4*(c-10*pi/9));d=(14*pi/9):(pi/1000):( 2*pi);s5 =0;ds5 =0;plot(ds1,s1,'b',ds2,s2,'b',ds3,s3,'b',ds4,s4,'b',ds5,s5,'b'); xlabel('ds/dp');ylabel('(位移s/mm)')title('ds/dp 与位移s曲线')grid onhold onx3=-150:0.001:0;y3 = 0.577*x3;plot (x3,y3,'r');hold onx1=-150:0.001:150;for i=1:1:250;k1=(s1(i+1)-s1(i))/ (ds1(i+1)-ds1(i));if(k1>=-1.733 && k1<=-1.731)y1=k1*(x1-ds1(i))+s1(i);plot (x1,y1,'r');end3.确定滚子半径(1)先求凸轮理论轮廓曲线,程序如下:Clc;clear;w = input('请输入w=');s0 = 100;s = 90;e = 50; x = 0:(pi/100):(pi/4);x1 = (s + s0)*cos(x)-e*sin(x);y1 = (s0 + s)*sin(x) - e*cos(x);y = (pi/4):(pi/100):(pi/2);x2 = (s + s0)*cos(y)-e*sin(y);y2 = (s0 + s)*sin(y) - e*cos(y);z = (pi/2 ):(pi/100):(10*pi/9);x3 = (s + s0)*cos(z)-e*sin(z);y3 = (s0 + s)*sin(z) - e*cos(z);c = (10*pi/9):(pi/1000):( 14*pi/9);x4 = (s + s0)*cos(c)-e*sin(c);y4 = (s0 + s)*sin(c) - e*cos(c);d=(14*pi/9):(pi/1000):( 2*pi);x5 = (s + s0)*cos(d)-e*sin(d);y5 = (s0 + s)*sin(d) - e*cos(d);plot(x1,y1,'b',x2,y2,'b',x3,y3,'b',x4,y4,'b',x5,y5,'b');xlabel('x/mm')ylabel('y/mm')title('理论轮廓曲线')grid on(2)理论轮廓线最小曲率半径编程代码:由下程序结果可知pmin =81.6667这里滚子半径为 r r < pmin-ΔΔ=3~5mm;取r r=10mm;clear;clc;v=[];syms x1 x2 x3 x4 x5s0 = 100;e = 50;s1 = 73*x1.^2;t1 = (s1 + s0)*cos(x1)-e*sin(x1);y1 = (s0 + s1)*sin(x1) - e*cos(x1);tx1=diff(t1,x1);txx1=diff(t1,x1,2);yx1=diff(y1,x1);yxx1=diff(y1,x1,2);for xx1= 0:(pi/100):(pi/4);k1=subs(abs((tx1*yxx1-txx1*yx1)/(tx1^2+yx1^2)^1.5),{x1},{xx1}); v=[v,1/k1];ends2 =90-73*(pi/2-x2).^2;t2 = (s2 + s0)*cos(x2)-e*sin(x2);y2 = (s0 + s2)*sin(x2) - e*cos(x2);tx2=diff(t2,x2);txx2=diff(t2,x2,2);yx2=diff(y2,x2);yxx2=diff(y2,x2,2);for xx2=(pi/4):(pi/100):(pi/2);k2=subs(abs((tx2*yxx2-txx2*yx2)/(tx2^2+yx2^2)^1.5),{x2},{xx2});k4=subs(abs((tx4*yxx4-txx4*yx4)/(tx4^2+yx4^2)^1.5),{x4},{xx4}); v=[v,1/k4];ends5 =0;t5 = (s5 + s0)*cos(x5)-e*sin(x5);y5 = (s0 + s5)*sin(x5) - e*cos(x5);tx5=diff(t5,x5);txx5=diff(t5,x5,2);yx5=diff(y5,x5);yxx5=diff(y5,x5,2);for xx5=(10*pi/9):(pi/100):( 4*pi/3);k5=subs(abs((tx5*yxx5-txx5*yx5)/(tx5^2+yx5^2)^1.5),{x5},{xx5}); v=[v,1/k5];endpmin=min(v)4.绘制凸轮轮廓曲线clear ;clc;syms x y z c dw= input('请输入w=');n3 = diff(x3);m3 = diff(y3);xt3= subs(x3 + (r*m3)./sqrt(m3.^2+n3.^2),z,zz);yt3 = subs(y3 - (r*n3)./sqrt(m3.^2+n3.^2),z,zz);cc= (10*pi/9):(pi/1000):( 14*pi/9);s4 =45*(1+cos(9/4*(c-10*pi/9)));x4 = (s4 + s0).*cos(c)-e*sin(c);y4 = (s0 +s4).*sin(c) - e*cos(c);n4 = diff(x4);m4 = diff(y4);xt4= subs(x4 + (r*m4)./sqrt(m4.^2+n4.^2),c,cc);yt4 =subs( y4 - (r*n4)./sqrt(m4.^2+n4.^2),c,cc);dd=(14*pi/9):(pi/1000):( 2*pi);s5 =0;x5 = (s5 + s0).*cos(d)-e*sin(d);y5 = (s0 +s5).*sin(d) - e*cos(d);n5 = diff(x5);m5 = diff(y5);xt5= subs(x5 + (r*m5)./sqrt(m5.^2+n5.^2),d,dd);yt5 =subs( y5 - (r*n5)./sqrt(m5.^2+n5.^2),d,dd);plot(xt1,yt1,'b',xt2,yt2,'b',xt3,yt3,'b',xt4,yt4,'b',xt5,yt5,'b')for i=1:3601if yy(1,i)<=y0/2s(1,i)=2*h*(yy(i)./y0).^2;v(1,i)=4*h*w*yy(i)./(y0.^2);a(1,i)=4*h*w.^2./(y0.^2);elseif yy(1,i)>y0/2 && yy(1,i)<y0s(1,i)=h-2*h./y0.^2.*(y0-yy(i)).^2;v(1,i)=4*h*w*(y0-yy(i))./(y0.^2);a(1,i)=-4*h*w.^2./(y0.^2);elseif yy(1,i)>=y0 && yy(1,i)<y0+yss(1,i)=h;v(1,i)=0;a(1,i)=0;elseif yy(1,i)>=y0+ys && yy(1,i)<y0+ys+y01s(1,i)=h/2*(1+cos(pi/y01*(yy(1,i)-y0-ys)));v(1,i)=-pi*h*w/2/y01*sin(pi/y01*(yy(1,i)-y0-ys));a(1,i)=-pi^2*h*w^2/2/y01^2*cos(pi/y01*(yy(1,i)-y0-ys)); elseif yy(1,i)>=y0+ys+y01 && yy(1,i)<=360s(1,i)=0;v(1,i)=0;a(1,i)=0;subplot(2,3,5) ;plot(x,y,'r',xt,yt,eex,eey,'g',r0x,r0y,'k')%画图title('实际理论轮廓线')axis equal%使坐标轴比例相等grid on%画网格线。
机械原理-凸轮机构及其设计
机械原理-凸轮机构及其设计第六讲凸轮机构及其设计(一)凸轮机构的应用和分类一、凸轮机构1.组成:凸轮,推杆,机架。
2.优点:只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑。
缺点:凸轮廓线与推杆之间为点、线接触,易磨损,所以凸轮机构多用在传力不大的场合。
二、凸轮机构的分类1.按凸轮的形状分:盘形凸轮圆柱凸轮2.按推杆的形状分尖顶推杆:结构简单,能与复杂的凸轮轮廓保持接触,实现任意预期运动。
易遭磨损,只适用于作用力不大和速度较低的场合滚子推杆:滚动摩擦力小,承载力大,可用于传递较大的动力。
不能与凹槽的凸轮轮廓时时处处保持接触。
平底推杆:不考虑摩擦时,凸轮对推杆的作用力与从动件平底垂直,受力平稳;易形成油膜,润滑好;效率高。
不能与凹槽的凸轮轮廓时时处处保持接触。
3.按从动件的运动形式分(1)往复直线运动:直动推杆,又有对心和偏心式两种。
(2)往复摆动运动:摆动推杆,也有对心和偏心式两种。
4.根据凸轮与推杆接触方法不同分:(1)力封闭的凸轮机构:通过其它外力(如重力,弹性力)使推杆始终与凸轮保持接触,(2)几何形状封闭的凸轮机构:利用凸轮或推杆的特殊几何结构使凸轮与推杆始终保持接触。
①等宽凸轮机构②等径凸轮机构③共轭凸轮(二)推杆的运动规律一、基本名词:以凸轮的回转轴心O为圆心,以凸轮的最小半径r0为半径所作的圆称为凸轮的基圆,r0称为基圆半径。
推程:当凸轮以角速度转动时,推杆被推到距凸轮转动中心最远的位置的过程称为推程。
推杆上升的最大距离称为推杆的行程,相应的凸轮转角称为推程运动角。
回程:推杆由最远位置回到起始位置的过程称为回程,对应的凸轮转角称为回程运动角。
休止:推杆处于静止不动的阶段。
推杆在最远处静止不动,对应的凸轮转角称为远休止角;推杆在最近处静止不动,对应的凸轮转角称为近休止角二、推杆常用的运动规律1.刚性冲击:推杆在运动开始和终止时,速度突变,加速度在理论上将出现瞬时的无穷大值,致使推杆产生非常大的惯性力,因而使凸轮受到极大冲击,这种冲击叫刚性冲击。
机械原理大作业凸轮机构设计
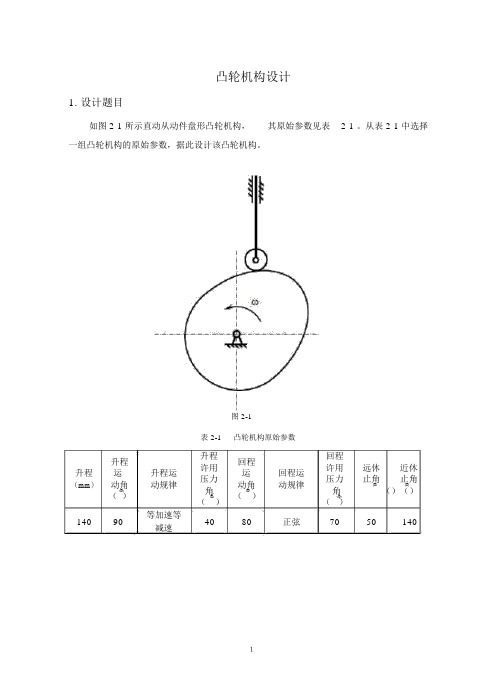
凸轮机构设计1.设计题目如图 2-1 所示直动从动件盘形凸轮机构,其原始参数见表2-1 。
从表 2-1 中选择一组凸轮机构的原始参数,据此设计该凸轮机构。
图 2-1表 2-1凸轮机构原始参数升程升程回程回程许用许用远休近休升程运升程运运回程运压力压力止角止角(mm)动角动规律动角动规律角角()()()()()()14090等加速等4080正弦7050140减速2.凸轮机构的设计要求(1)确定凸轮推杆升程、回程运动方程,并绘制推杆位移、速度、加速度线图;【1】确定推杆的升程回程运动方程对于不同运动规律的凸轮结构,其上升与下降的方式不一,但遵循同样的运动顺序:上升、远休止点恒定、下降、近休止点恒定。
因此设计它仅需确定这四个阶段的角度与位置即可。
推程阶段:1120s22回程阶段:v22401222402a1⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2s1120(2)21402v2240 1 (2)222402a1⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2(97)sin(97)s140[1422]23151[1cos(97)]v22(0)4()422835 12 sin(97)711a222⋯⋯⋯⋯⋯ ()99【 2】绘制推杆位移、速度、加速度线图①位移图像程序:i1=(0:0.01:(1/4)*pi);s1=280.*(((2/pi).*i1).^2);i2=((1/4)*pi:0.01:(1/2)*pi);s2=140-1120.*(((pi/2)-i2).^2)/((pi).^2);i3=((1/2)*pi:0.01:(7/9)*pi);s3=140;i4=((7/9)*pi:0.01:(11/9)*pi);s4=140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi)); i5=((11/9)*pi:0.01:2*pi);s5=0;plot(i1,s1,'b',i2,s2,'b',i3,s3,'b',i4,s4,'b',i5,s5,'b')位移图像②速度图像程序令1 1 则可以得到速度图像的程序i1=(0:0.01:(1/4)*pi);v1=(2240.*i1)/((pi).^2);i2=((1/4)*pi:0.01:(1/2)*pi);v2=(2240.*((pi/2)-i2))/((pi).^2);i3=((1/2)*pi:0.01:(7/9)*pi);v3=0;i4=((7/9)*pi:0.01:(11/9)*pi);v4=-315.*(1-cos(((9.*i4)-(7*pi))./2))/(pi);i5=((11/9)*pi:0.01:2*pi);v5=0;plot(i1,v1,'b',i2,v2,'b',i3,v3,'b',i4,v4,'b',i5,v5,'b')速度图像③加速度程序及其图像a1=2240/((pi).^2);i2=((1/4)*pi:0.01:(1/2)*pi);a2=-2240/((pi).^2);i3=((1/2)*pi:0.01:(7/9)*pi);a3=0;i4=((7/9)*pi:0.01:(11/9)*pi);a4=-2835.*sin(((9*i4)-(7*pi))/2)/(2*pi);i5=((11/9)*pi:0.01:2*pi);a5=0;plot(i1,a1,'b',i2,a2,'b',i3,a3,'b',i4,a4,'b',i5,a5,'b')加速度图像【3】绘制凸轮机构的dss 线图 di1=(0:0.01:(1/4)*pi);s1=(1120.*(i1.^2))/(pi.^2);i2=((1/4)*pi:0.01:(1/2)*pi);ds2=1120/pi-(2240.*i2)/(pi.^2);s2=140-1120.*(((pi/2)-i2).^2)/((pi).^2);i3=((1/2)*pi:0.01:(7/9)*pi);ds3=i3-i3;s3=140+i3-i3;i4=((7/9)*pi:0.01:(11/9)*pi);ds4=(315/pi).*(-1+cos(((9.*i4)-(7.*pi))/2));s4=140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi)); i5=((11/9)*pi:0.01:2*pi);s5=i5-i5;ds5=i5-i5;plot(ds1,s1,ds2,s2,ds3,s3,ds4,s4,ds5,s5,)凸轮机构的【4】确定凸轮基圆半径和偏距d ssd线图由图像可知道凸轮的轴心应该在公共区以下凸轮偏心距取 e 3mm ,s0200mm【 5】凸轮的理论轮廓i1=(0:0.01:(1/4)*pi);x1=(200+280.*(((2/pi).*i1).^2)).*cos(i1)-3.*sin(i1);y1=(200+280.*(((2/pi).*i1).^2)).*sin(i1)+3.*cos(i1);i2=((1/4)*pi:0.01:(1/2)*pi);x2=(200+140-1120.*(((pi/2)-i2).^2)/((pi).^2)).*cos(i2)-3.*sin(i2); y2=(200+140-1120.*(((pi/2)-i2).^2)/((pi).^2)).*sin(i2)+3.*cos(i2); i3=((1/2)*pi:0.01:(7/9)*pi);x3=340.*cos(i3)-3.*sin(i3);y3=340.*sin(i3)+3.*cos(i3);i4=((7/9)*pi:0.01:(11/9)*pi);x4=(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))). *cos(i4)-3.*sin(i4);y4=(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))). *sin(i4)+3.*cos(i4);i5=((11/9)*pi:0.01:2*pi);x5=200.*cos(i5)-3.*sin(i5);y5=200.*sin(i5)+3.*cos(i5);plot(x1,y1,x2,y2,x3,y3,x4,y4,x5,y5)凸轮的理论轮廓【 6】确定滚子半径的程序v=[];syms i1 i2 i3 i4 i5s0 = 200;e = 20;s1=280*(((2/pi)*i1).^2);t1 = (s1 + s0)*cos(i1)-e*sin(i1);y1 = (s0 + s1)*sin(i1) - e*cos(i1);ti1=diff(t1,i1);tii1=diff(t1,i1,2);yi1=diff(y1,i1);yii1=diff(y1,i1,2);for ii1=(0:0.01:(1/4)*pi);k1=subs(abs((ti1*yii1-tii1*yi1)/(ti1^2+yi1^2)^1.5),{i1},{ii1});v=[v,1/k1];ends2=140-1120.*(((pi/2)-i2).^2)/((pi).^2);t2= (s2 + s0)*cos(i2)-e*sin(i2);y2 = (s0 + s2)*sin(i2) - e*cos(i2);ti2=diff(t2,i2);tii2=diff(t2,i2,2);yi2=diff(y2,i2);yii2=diff(y2,i2,2);for ii2=((1/4)*pi:0.01:(1/2)*pi);k2=subs(abs((ti2*yii2-tii2*yi2)/(ti2^2+yi2^2)^1.5),{i2},{ii2});v=[v,1/k2];ends3=140;t3 = (s3 + s0)*cos(i3)-e*sin(i3);y3 = (s0 + s3)*sin(i3) - e*cos(i3);ti3=diff(t3,i3);tii3=diff(t3,i3,2);yi3=diff(y3,i3);yii3=diff(y3,i3,2);for ii3=((1/2)*pi:0.01:(7/9)*pi);k3=subs(abs((ti3*yii3-tii3*yi3)/(ti3^2+yi3^2)^1.5),{i3},{ii3});v=[v,1/k3];ends4=140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi)); t4 = (s4 + s0)*cos(i4)-e*sin(i4);y4 = (s0 + s4)*sin(i4) - e*cos(i4);ti4=diff(t4,i4);tii4=diff(t4,i4,2);yi4=diff(y4,i4);yii4=diff(y4,i4,2);for ii4=((7/9)*pi:0.01:(11/9)*pi);k4=subs(abs((ti4*yii4-tii4*yi4)/(ti4^2+yi4^2)^1.5),{i4},{ii4});v=[v,1/k4];Ends5=0;t5 = (s5 + s0)*cos(i5)-e*sin(i5);y4 = (s0 + s5)*sin(i5) - e*cos(i5);ti5=diff(t5,i5);tii5=diff(t5,i5,2);yi5=diff(y5,i5);yii5=diff(y5,i5,2);for ii5=((11/9)*pi:0.01:2*pi);k5=subs(abs((ti5*yii5-tii5*yi5)/(ti5^2+yi5^2)^1.5),{i5},{ii5});v=[v,1/k5];endmin(v)确定之后发现滚子半径是r 2mm【 7】确定凸轮的实际轮廓凸轮的实际轮廓x1=(200+280.*(((2/pi).*i1).^2)).*cos(i1)-3.*sin(i1);y1=(200+280.*(((2/pi).*i1).^2)).*sin(i1)+3.*cos(i1);i2=((1/4)*pi:0.01:(1/2)*pi);x2=(200+140-1120.*(((pi/2)-i2).^2)/((pi).^2)).*cos(i2)-3.*sin(i2); y2=(200+140-1120.*(((pi/2)-i2).^2)/((pi).^2)).*sin(i2)+3.*cos(i2);i3=((1/2)*pi:0.01:(7/9)*pi);x3=340.*cos(i3)-3.*sin(i3);y3=340.*sin(i3)+3.*cos(i3);i4=((7/9)*pi:0.01:(11/9)*pi);x4=(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))).*cos(i4)-3.*sin(i4);y4=(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))).*sin(i4)+3.*cos(i4);i5=((11/9)*pi:0.01:2*pi);x5=200.*cos(i5)-3.*sin(i5);y5=200.*sin(i5)+3.*cos(i5);dx1=(2240.*i1.*cos(i1))/((pi).^2)+(200+1120.*((i1).^2)/((pi).^2)).*sin(i 1)-3.*cos(i1);dy1=(2240.*i1.*sin(i1))-(200+1120.*((i1).^2)/((pi).^2)).*cos(i1)-3.*sin( i1);dx2=(-(1120.*(2.*i2-pi).*cos(i2)/((pi).^2)))-(340-1120.*((2.*i2-pi).^2)) .*sin(i2)-3.*cos(i2);dy2=-(1120.*(2.*i2-pi).*sin(i2)/((pi).^2))+(340-1120.*((2.*i2-pi).^2)).* cos(i2)-3.*sin(i2);dx3=-340.*sin(i3)-3.*cos(i3);dy3=340.*cos(i3)-3.*sin(i3);dx4=((-315/pi)+630.*cos((9.*i4-7.*pi)/2)).*cos(i4)-(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))).*sin(i4)-3.*cos(i4);dy4=((-315/pi)+630.*cos((9.*i4-7.*pi)/2)).*sin(i4)+(200+140.*(1-((9.*i4-7*pi)/(4*pi))+sin(((9.*i4)-(7*pi))./2)/(2*pi))).*cos(i4)-3.*sin(i4);dx5=-200.*sin(i5)-3.*cos(i5);dy5=200.*cos(i5)-3.*sin(i5);X1=x1+3.*dy1/sqrt(dy1.^2+dx1.^2);Y1=y1-3.*dx1/sqrt(dy1.^2+dx1.^2);X2=x2+3.*dy2/sqrt(dy2.^2+dx2.^2);Y2=y2-3.*dx2/sqrt(dy2.^2+dx2.^2);X3=x3+3.*dy3/sqrt(dy3.^2+dx3.^2);Y3=y3-3.*dx3/sqrt(dy3.^2+dx3.^2);X4=x4+3.*dy4/sqrt(dy4.^2+dx4.^2);Y4=y4-3.*dx4/sqrt(dy4.^2+dx4.^2);X5=x5+3.*dy5/sqrt(dy5.^2+dx5.^2);Y5=y5-3.*dx5/sqrt(dy5.^2+dx5.^2);plot(X1,Y1,X2,Y2,X3,Y3,X4,Y4,X5,Y5)。
机械原理 第3章 凸轮机构
2
26
§3.3 凸轮轮廓曲线的设计 一、凸轮轮廓曲线设计是根据凸轮参数如 基圆半径、推程和推程运动角、回程及回程 运动角、远、近休止角、偏距等参数,用反 转法设计凸轮轮廓曲线。
27
二、1-对心反转图解法设计凸轮廓线,见下图:
28
29
2-偏心反转 图解法设计凸轮轮廓
主要介绍已知从动件运动规律线图设计凸轮轮廓。 一、直动从动件盘形凸轮轮廓的绘制 分别介绍以下两种类型。 1、偏置尖顶直动从动件盘形凸轮 已知从动件位移线图如图3-8 (b)所示,基圆半径 r0,凸轮行程h,推程运动角Φ=1800,休止角 Φs=300,回程角Φ'=900,按图示画出凸轮轮廓线。 作图步骤按反转法如下: 1)将Φ、Φ'各平为4等份,如图(b)中1-1';...8-8'。 并以偏距e和r0画圆,如图(a)所示。基圆与导 路的交点B0(C0)即为从动件的起始点。 2)以OC0为起点,在基圆上平分Φ=180和Φ'=90 分别得C1、C2、C3、和C6、C7、C8各点,并过 C0、C1 . . . 各点向偏距圆作切线,这些切线就是 反转法导路在此点的位置。 3)在各对应的切线上,取C1B1=11' ;C2B2=22' ....得从动件尖顶位置B1、B2、B3... 4)将B0、B1、B2…连接成光滑的曲线就是凸轮 轮廓线(注意:B4、B5是圆弧,B9、B0之间是基 圆) 最后画出图纸进行加工。 30 当e=0时,各切线变成通过O点的射线。
10
一、从动件的运动规律的描述与术语
从动杆位移线图的作图方法及基本名词术语
首先应确认,从动件的运 动规律是由主动件凸轮的轮 廓形状决定的。在图 3-5 中, 回转中心 O 到半径最小点 A 的 K' 圆叫基圆。图 3-5 中凸轮的轮 ϕk 廓规律是,弧 AB 间的半径逐 渐变大,对应的圆心角为 ϕ; 弧 BC 间半径保持不变,对应 K ϕk 的圆心角为 ϕ s ;弧 CD 间半径 逐步变小到基圆半径,对应 的圆心角为 ϕ ' ;弧 DA 间半径 保持基圆半径不变,对应的 圆心角为ϕs'。现凸轮以ω速度 顺时针转动,以 φ=ωt 为横坐 标,从动杆的移动 S为纵坐标, 则从动杆的移动曲线展开图 图3-12:凸轮轮廓与从动件位移线图 如(b)所示。其中: h--升程;ϕ--推程运动角;ϕs--远休止角; ϕ‘--回程运动角;ϕ's--近休止角。这 些角度总和为360˚。从图中可知,当凸轮从A点转过ϕk角到K点时,从动杆升高 到K’点;当凸轮从A点转过ϕ角度,从动杆升高了h到B点。其他各点作图方法 11 一样,然后将各点连成光滑的曲线,就是从杆的位移线图(b).
哈工大机械原理大作业凸轮设计
哈工大机械原理大作业凸轮设计Harb inIn stituteofTech no logy大作业设计说明书课程名称:设计题目:院班学级:机械原理凸轮机构设计1208103系:机械设计制造及其自动化设计指导教师:设计时间:林琳2019425哈尔滨工业大学一、运动分析题目如图所示直动从动件盘形凸轮机构,其原始数据参数见表2-1,。
从表2-1中选择一组凸轮机构原始参数,据此设计该凸轮机构。
二、凸轮运动规律升程运动角(°)90升程运动规律生程许回程运用压力动角角(°)等加等4080减速回程运动规律回程许远休用压力止角角(°)余弦加7040速度近休止角(°)150升程(mm)1501 、升程运动规律(0 /4)位移s=2h(速度v2 /2 4*150*w( /2)A24*150*w A2( /2)人2加速度a2 、升程运动规律(/4 /2)位移s 1502*150( /2 )A2(/2)A2速度v4*60*w( /2 )( /2)A24*60*wA2( /2)A2加速度a3 、回程运动规律(/2 2/2 2 ) 93 位移s 75*{1 cos[ (/2 2 )]}949速度vhw*sin*[ ( /2 2 )]92*4 499加速度aA2hw A2cos[ ( /2 2 )]94 2*(4 )A299根据运动规律做出的曲线以及源代码如图所示位移线图速度线图加速度线图位移线图源代码fl=pi/180;x0=0:fl:pi/4;x1=pi/4:fl:pi/2;x2=pi/2:fl:13*pi/18;x3=13*pi/18:fl:7*pi/6;x4=7*pi/6:fl:2*pi;s0=300*(2*x0/pi)A 2;s1=150-1200*(pi/2-x1).*(pi/2-x1)/(pi.*pi);s2=150+x2*0;s3=75*(1+cos(9/4*(x3-13*pi/18)));s4=x4*0;Plot(x0,s0,x1,s1,'b',x2,s2,'b',x3,s3,'b',x4,s4,'b')axis([070200])title('杆位移线图')xlabel(' 0 (rad)')ylabel('V(mm⑸')gridon速度源代码fl=pi/180;x0=0:fl:pi/4;x1=pi/4:fl:pi/2;x2=pi/2:fl:13*pi/18;x3=13*pi/18: fl:7*pi/6;x4=7*pi/6:fl:2*pi;w=30;v0=600.*w.*x0/(pi/2)A2;v1=600.*w.*(pi/2-x1)/(pi/2)A2;v2=0*x2;v3=-150*30*pi/(2*4*pi/9).*si n(9/4*(x3-13*pi/18));v4=0*x4;Plot(x0,v0,'b',x1,v1,'b',x2,v2,'b',x3,v3,'b',x4,v4,'b')title('推杆速度')xlabel(' 0 (rad)')ylabel('v(mm/s')gridon加速度源代码fl=pi/180;x0=0:fl:pi/4;x1=pi/4:fl:pi/2;x2=pi/2:fl:13*pi/18;x3=13*pi/18: fl:7*pi/6;x4=7*pi/6:fl:2*pi; w=30;a0=600*w.A2/(pi/2).A2+xO*0;a 仁-600*w.A2/(pi/2)A2+x1*0;a2=x2*0; a3=-pi*pi*150*30*30/(2*4*pi/9)A2.*cos(9/4*(x3-13*pi/18));a4=x4*0;Plot(x0,a0,'b',x1,a1,'b',x2,a2,'b',x3,a3,'b',x4,a4,'b')title('推杆加速度')xlabel(' 0 (rad)')ylabel('a(mm/sA2')gridon三、凸轮机构的dss曲线绘制d由凸轮机构位移公式可知4h(/2)A2(0 /4)ds 4*60 ( /2 )( /4 /2)d ( /2)A275*4*s in 9( 13 )( /2 2 /2 2 4 ) 9418999 则其曲线如图所示其源代码如下clcfl=pi/180;x0=0:fl:pi/4;x1=pi/4:fl:pi/2;x2=pi/2:fl:13*pi/18;x3=13*pi/18: fl:7*pi/6;x4=7*pi/6:fl:2*pi;w=30;d0=-600.*x0/(pi/2)A2;d1=-600.*(pi/2-x1)/(pi/2)A2;d2=0*x2;d3=75*4/9.*si n(9/4*(x3-13*pi/18));d4=0*x4;s0=300*(2*x0/pi)A2;s1=150-1200*(pi/2-x1).*(pi/2-x1)/(pi.*pi);s2=150+x2*0;s3=75*(1+cos(9/4*(x3-13*pi/18)));s4=x4*0;Plot(d0,s0,'b',d1,s1,'b',d2,s2,'b',d3,s3,'b',d4,s4,'b')title(' 类速度-位移曲线')xlabel(' 类速度(mm/rad)')ylabel(' 位移(mmm)')gridon四、确定凸轮的基圆半径和偏距以ds/df-s图为基础,可分别作出二条限制线,以这二条线可确定最小基圆半径及所对应的偏距e,在其下方选择一合适点,即可满足压力角的限制条件图像如图所示由图像可知,设置点(50,-100 )为凸轮轴心位置。
机械原理大作业凸轮

机械原理大作业凸轮
机械原理大作业,凸轮。
凸轮是机械传动中常用的一种机构,它通过不规则形状的轮廓
来实现对运动部件的控制。
在机械原理中,凸轮通常被用于将旋转
运动转化为直线运动,或者实现复杂的运动轨迹控制。
本文将对凸
轮的结构、工作原理以及应用进行介绍。
首先,凸轮的结构可以分为凸轮轴、凸轮轮廓和凸轮座三个部分。
凸轮轴是凸轮的主体,它通常由钢材或铸铁制成,具有一定的
硬度和强度。
凸轮轮廓是凸轮的关键部分,它的形状决定了凸轮的
运动规律。
凸轮座则是凸轮的支撑部分,用于将凸轮固定在机器上。
这三个部分共同构成了凸轮的基本结构。
其次,凸轮的工作原理是利用凸轮轮廓的不规则形状来控制运
动部件的运动。
当凸轮轴旋转时,凸轮轮廓会推动凸轮座上的运动
部件,使其产生直线运动或者复杂的运动轨迹。
通过合理设计凸轮
轮廓的形状,可以实现各种不同的运动控制效果。
最后,凸轮在机械传动中有着广泛的应用。
它常常被用于发动
机的气门控制系统中,通过凸轮的旋转来控制气门的开闭,从而实现发动机的正常工作。
此外,凸轮还被应用于纺织机械、冲压机械等领域,用于控制各种不同的运动部件。
综上所述,凸轮作为机械传动中常用的机构,具有结构简单、工作可靠、应用广泛的特点。
通过合理设计凸轮的结构和轮廓,可以实现对运动部件的精确控制,从而实现各种不同的机械运动。
在未来的机械设计中,凸轮仍然会发挥重要的作用,为各种机械设备的运动控制提供可靠的解决方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理大作业(二)作业名称:机械原理设计题目:凸轮机构设计院系:机电工程学院班级:设计者:学号:指导教师:丁刚陈明设计时间:哈尔滨工业大学机械设计1.设计题目如图所示直动从动件盘形凸轮机构,根据其原始参数设计该凸轮。
表一:凸轮机构原始参数序号升程(mm) 升程运动角(º)升程运动规律升程许用压力角(º)回程运动角(º)回程运动规律回程许用压力角(º)远休止角(º)近休止角(º)12 80 150 正弦加速度30 100 正弦加速度60 60 502.凸轮推杆运动规律(1)推杆升程运动方程S=h[φ/Φ0-sin(2πφ/Φ0)]V=hω1/Φ0[1-cos(2πφ/Φ0)]a=2πhω12sin(2πφ/Φ0)/Φ02式中:h=150,Φ0=5π/6,0<=φ<=Φ0,ω1=1(为方便计算)(2)推杆回程运动方程S=h[1-T/Φ1+sin(2πT/Φ1)/2π]V= -hω1/Φ1[1-cos(2πT/Φ1)]a= -2πhω12sin(2πT/Φ1)/Φ12式中:h=150,Φ1=5π/9,7π/6<=φ<=31π/18,T=φ-7π/6 3.运动线图及凸轮线图运动线图:用Matlab编程所得源程序如下:t=0:pi/500:2*pi;w1=1;h=150;leng=length(t);for m=1:leng;if t(m)<=5*pi/6S(m) = h*(t(m)/(5*pi/6)-sin(2*pi*t(m)/(5*pi/6))/(2*pi));v(m)=h*w1*(1-cos(2*pi*t(m)/(5*pi/6)))/(5*pi/6);a(m)=2*h*w1*w1*sin(2*pi*t(m)/(5*pi/6))/((5*pi/6)*(5*pi/6));% 求退程位移,速度,加速度elseif t(m)<=7*pi/6S(m)=h;v(m)=0;a(m)=0;% 求远休止位移,速度,加速度elseif t(m)<=31*pi/18T(m)=t(m)-21*pi/18;S(m)=h*(1-T(m)/(5*pi/9)+sin(2*pi*T(m)/(5*pi/9))/(2*pi));v(m)=-h/(5*pi/9)*(1-cos(2*pi*T(m)/(5*pi/9)));a(m)=-2*pi*h/(5*pi/9)^2*sin(2*pi*T(m)/(5*pi/9));% 求回程位移,速度,加速度elseS(m)=0;v(m)=0;a(m)=0;% 求近休止位移,速度,加速度endend推杆位移图推杆速度图推杆加速度图4.确定凸轮基圆半径和偏距在凸轮机构的ds/dφ-s线图里再作斜直线D t d t与升程的[d s/dφ-s(φ)]曲线相切并使与纵坐标夹角为升程许用压力角[α],则D t d t线的右下方为选择凸轮轴心的许用区。
作斜直线D t'd t'与回程的曲线相切,并使与纵坐标夹角为回程的许用压力角[α],则D t'd t'线的左下方为选择凸轮轴心的许用区。
考虑到升程开始瞬时机构压力角也不超过许用值,自B0点作限制线B0d0''与纵坐标夹角为升程[α],则两直线D t d t和B0d0''组成的d t O1d0'' 以下区域为选取凸轮中心的许用区,如选O点作为凸轮回转中心,在推程和回程的任意瞬时,凸轮机构压力角均不会超过许用值,此时凸轮的基圆半径r0=OB0,偏距为e。
若选在O1点则O1B0为凸轮最小基圆半径r0min。
%求ds/dα-sS线图v1=-v;plot(v1,S);title('ds/d\phi-S');hold on;grid on;%求Dtdt线for m=1:lengif v1(m)<0b(m)=(S(m)-tan(120*pi/180)*v1(m));else b(m)=0;endendk=1;for m=1:lengif b(k)>b(m)k=m;endendX3=-150:150;Y3=tan(120*pi/180)*X3+b(k);plot(X3,Y3);hold on%求Dt'dt'线for m=1:lengif v1(m)>0b(m)=(S(m)-tan(30*pi/180)*v1(m));else b(m)=0;endendn=1;for m=1:lengif b(n)>b(m)n=m;endendX=-150:150;Y=tan(30*pi/180)*X+b(n);plot(X,Y);hold on%sS轴z=-200:200;plot(0,z,'r');hold on%求B0d0''线Z=-tan(120*pi/180)*X; plot(X,Z);grid on;得最小基圆对应的坐标位置大约为(-40,-80) 经计算取偏距e=40mm ,r0=89.4mm.5、滚子半径及凸轮理论廓线和实际廓线为求滚子许用半径,须确定最小曲率半径,以防止凸轮工作轮廓出现尖点或出现相交包络线,确定最小曲率半径数学模型如下:)/)(/()/)(/(])/()/[(22222/322ϕϕϕϕϕϕρd x d d dy d y d d dx d dy d dx -+= 其中:ϕϕϕϕcos )(sin ])/[(/0s s e d ds d dx ++-=ϕϕϕϕsin )(cos ])/[(/0s s e d ds d dy +--=ϕϕϕϕϕsin ])/[(cos ])/(2[/02222s s d s d e d ds d x d --+-=ϕϕϕϕϕcos ])/[(sin ])/(2[/02222s s d s d e d ds d y d --+--=利用上式可求的最小曲率半径,而后可确定实际廓线。
理论廓线数学模型:凸轮实际廓线坐标方程式:其中r t 为确定的滚子半径。
根据上面公式,利用matlab 编程求解,其代码如下:%求理论廓线%e=-40 基圆半径r0=89.4r0=89.4;S0=80;e=40;J0=atan(S0/e);X=r0*cos(t);Y=r0*sin(t);X1=e*cos(t);Y1=e*sin(t);X0=(S0+S).*sin(t)+e.*cos(t);Y0=(S0+S).*cos(t)-e.*sin(t);plot(X,Y,X1,Y1,X0,Y0);v=[];syms phi1 phi2 phi3 phi4 phi5;s0=100;h=110;e=50;PI=3.14159;Phi0=5*PI/6;Phis=7*PI/6;Phi01=31*PI/18;Phis1=2*PI;s1 = h*(phi1/(5*pi/6)-sin(2*pi*phi1)/(5*pi/6))/(2*pi);X1=(s0+s1).*cos(phi1)-e*sin(phi1);Y1=(s0+s1).*sin(phi1)+e*cos(phi1);XX1=diff(X1,phi1);XXX1=diff(X1,phi1,2);YY1=diff(Y1,phi1);YYY1=diff(Y1,phi1,2);for phi11=0:PI/180:Phi0;p=subs(abs((XX1^2+YY1^2)^1.5/(XX1*YYY1-XXX1*YY1)),{phi1},{phi11}); v=[v,p];ends2=h;X2=(s0+s2).*cos(phi2)-e*sin(phi2);Y2=(s0+s2).*sin(phi2)+e*cos(phi2);XX2=diff(X2,phi2);XXX2=diff(X2,phi2,2);YY2=diff(Y2,phi2);YYY2=diff(Y2,phi2,2);for phi22=Phi0:PI/180:Phis;p=subs(abs((XX2^2+YY2^2)^1.5/(XX2*YYY2-XXX2*YY2)),{phi2},{phi22}); v=[v,p];endS(m)=h*(1-phi3/(5*pi/9)+sin(2*pi*phi3/(5*pi/9))/(2*pi));X3=(s0+s3).*cos(phi3)-e*sin(phi3);Y3=(s0+s3).*sin(phi3)+e*cos(phi3);XX3=diff(X3,phi3);XXX3=diff(X3,phi3,2);YY3=diff(Y3,phi3);YYY3=diff(Y3,phi3,2);for phi33=Phis:PI/180:Phi01;p=subs(abs((XX3^2+YY3^2)^1.5/(XX3*YYY3-XXX3*YY3)),{phi3},{phi33}); v=[v,p];ends4=0;X4=(s0+s4).*cos(phi4)-e*sin(phi4);Y4=(s0+s4).*sin(phi4)+e*cos(phi4);XX4=diff(X4,phi4);XXX4=diff(X4,phi4,2);YY4=diff(Y4,phi4);YYY4=diff(Y4,phi4,2);for phi44=Phi01:PI/180:Phis1;p=subs(abs((XX4^2+YY4^2)^1.5/(XX4*YYY4-XXX4*YY4)),{phi4},{phi44}); v=[v,p];endmin(v)得到:min(v)ans =89.4=89.4即Rmin>=r根据要求:Rmin取滚子半径为18可得所以可判断出(k)=89.4mm,现取r t=18mm,利用matlab编程得实际和理论廓线,其代码如下:%求实际廓线%辊子半径r2=18mmr2=18;X4=X0+r2.*Y1./sqrt(X1.^2+Y1.^2);Y4=Y0-r2.*X1./sqrt(X1.^2+Y1.^2);X5=(r0-r2)*cos(t);Y5=(r0-r2)*sin(t);plot(X4,Y4);6、基圆及凸轮理论廓线和实际廓线图。