瓦锡兰成功完成无人操作航行测试
四川省眉山市洪雅县2023-2024学年七年级上册期末地理试题(含解析)

七年级(上)期末教学质量监测地理试题一、选择题(下列各小题有且只有一个正确答案,每小题2分,共40分)2023年9月21日15时48分,“天宫课堂”第四课在中国空间站开讲,新晋“太空教师”景海鹏、朱杨柱、桂海潮为广大青少年带来一场精彩的太空科普课,这是中国航天员首次在梦天实验舱内进行授课。
据此,完成下面小题。
1.宇航员在太空中看到地球的自转方向,正确的是()A.B.C.D.2.我国宇航员在空间站约1.5个小时就可以绕地球一圈,其在太空一天可以看到日出日落的次数是()A.8次B.10次C.12次D.16次3.我国空间站的建设和发展,有利于()A.航天技术发展B.新能源技术发展C.减少碳排放D.独占太空资源北京某中学同学打算利用五一假期参加登长城活动,下左图为“长城某段景观图”,下右图为“5月1~4日期间北京天气状况及长城某区域等高线地形图”。
据此完成下面小题。
4.最适宜登长城的日期是()A.5月1日B.5月2日C.5月3日D.5月4日5.你认为在①①①①四条虚线所表示的位置中,古长城最可能在的位置是()A.①B.①C.①D.①6.如图为“探究海陆温度变化的差异”模拟实验示意图,白天砂石的温度最有可能是()A.8①B.17①C.23①D.34①2023年5月底将在上海举办主题为“数字新时代·链接新未来”的国际人工智能产品博览会。
图黑点所示城市所在国的行业组织和贸促机构将组团参展。
完成下面小题。
7.有关参展国的分布表述正确的是()A.从纬度位置上看,都来自中纬度地区B.从半球位置上看,都来自北半球C.从大陆分布上看,都来自亚欧大陆D.从大洋分布上看,都来自太平洋沿岸8.组团参展国家数量最多的大洲是()A.亚洲B.北美洲C.欧洲D.非洲旅行过程中你关注过各地不同的路牌吗?图为“某国富有文化特色的‘请减速’道路警示牌”。
读图,完成下列小题。
9.该国()A.位于北极地区附近B.植被为热带雨林C.气候干旱沙漠广布D.河湖众多植被茂盛10.图中道路“道路警示牌”上的语言除英语外,另一种语言可能是()A.汉语B.阿拉伯语C.俄语D.西班牙语下图是某山脉的迎风坡和背风坡成云致雨示意图。
行测测试题(附答案)

行测测试题(附答案)第一部分常识判断1.国家知识产权局等九部门联合印发《知识产权保护体系建设工程实施方案》,明确到2035年,形成()的现代化知识产权保护治理体系。
①政府履职尽责②执法部门严格监管③司法机关公正司法④经营主体规范管理⑤行业组织自律自治⑥社会公众诚信守法A.①②④⑤⑥B.①②③④⑤⑥C.①③④⑤⑥D.②③④⑤⑥【答案】:B2.目前()运载火箭已完成各项研制工作,正在开展首飞箭的总装总测,计划2024年在海南文昌我国首个商业发射场,完成首飞箭的发射任务。
A.长征十二号B.探月十号C.探月十二号D.长征十号【答案】:A3.中国科学院深海科学与工程研究所与印度尼西亚国家研究创新署23日顺利完成为期一个月的爪哇海沟联合科考。
其间,两国科研人员借助()全海深载人潜水器成功下潜(),创下印尼深海下潜新纪录。
A.“奋斗者”号;10909米B.“深海勇士”号;9980米C.“奋斗者”号;7178米D.“深海勇士”号;8989米【答案】:C4.2024年1月15日,全球第一桶地下原位热解煤焦油在()提取成功,实现煤田采油从"0"到"1"的实质性突破。
1/ 15A.河南B.陕西C.黑龙江D.山西【答案】:B5.2023年,全国农村低收入人口和脱贫人口参保率稳定在()以上。
A.95%B.99.9%C.90%D.97%【答案】:B6.市场经济运行的基本要求是()。
A.卖方主权B.价格固定C.公平竞争D.市场出清【答案】:C7.李白是个非常自负的诗人,下列诗句能反映他的这一性格的是()。
A.奈何青云士,弃我如尘埃B.长风破浪会有时,直挂云帆济沧海C.大雅久不作,吾衰竟谁陈D.世无洗耳翁,谁知尧与跖【答案】:A8.主旨在公文中是贯穿首尾,支配一切的中心,公文确立主旨要遵循一定的原则,“一语道破真实情况”体现了公文确立主旨要遵循原则中的:A.新颖性B.深刻性C.明确性D.单一性【答案】:C2/ 159.随着科技的发展,人们已经可以利用基因技术通过生物工程创造出新的物种。
中国在南海当面捞走美军无人潜航器国外无人潜航器最新发展现状

美全国广播公司 (NPR )16 日报道, 本周四 (12 月15 日),中国海军趁美国一艘无人潜航器浮上水面之机, 抢在美 军打捞人员之前将其捞走,事情发生在距离菲律宾苏比克湾 约 50 海里的海上。
美国泰里达因公司研制的斯洛克姆无人水下滑翔机(Slocum glider ) 美国:水下无人滑翔机将用于远海作战 美国海军 学院新闻网 (USNI news ) 今天补充了部分事件细节,据称, 捞走美国无人潜航器的是中国海军“南救 510”号打捞救生船, 该船为中国 922 型救捞船 (北约称“大浪 3”级),该舰当时与美 国正在用无人机进行海底地形探测作业的“鲍迪奇”号海洋调 查船仅 500 码(457.2 米) 。
被捞走的无人水下航行器是“水下 滑翔机”,这是美国最复杂的无人潜航器, 用于进行海洋调查, 上面装有用于探测海底地形的非保密装备。
美媒称捞走 他们水下航行器的就是这艘南救 510 号救捞船 无人潜航器,英文名 Unmannedunderwater vehicle 是没有 人驾驶、靠遥控或自动控制在水下 航行的器具,主要指那 些代替潜水员或载人小型潜艇进行深海探测、救生、排除水 雷等高危险性水下作业的智能化系统。
其实也就是水下机器 人(或其中某种) 。
人潜航器按应用领域,可分为军用与民 用。
在军用领域上,无人潜航器可作为一种新概念武器中无 人作战平台武器。
从这种意义上说,无人潜航器的作用和无 人机作用差不多。
中国在南海当面捞走美军无人潜航器 新发展现状 国外无人潜航器最从外形上看,一些无人潜航器与鱼雷十分相似,那是因为它们可能直接由拆除了炸药的鱼雷改进而来,或者是需要从潜艇的鱼雷发射管中释放,但更多的无人潜航器则针对特定的功能, 具有各自独特的构造。
无论外观怎样,无人潜航器一般都由骨架及浮体、推进系统、航行控制系统以及探测系统等部分组成,一些无人潜航器上还配有机械手等机构。
无人潜航器的发展得益于仿生学的进步,这一点毋庸置疑。
黑龙江2024行测笔试真题及答案

黑龙江2024行测笔试真题及答案第一部分常识判断1.东航()2024年1月9日开始执行上海虹桥至北京大兴航线的商业航班。
这是继上海虹桥至成都天府航线常态化商业运营之后,东航()执飞的第二条定期商业航线。
A.AG600大飞机B.G20大飞机C.C919大飞机D.沈括号大飞机【答案】:C2.北京中关村综合保税区2024年4月26日通过正式验收,成为我国首个以“()”为特色的综合保税区。
A.科技创新B.研发创新C.信息科技D.科技研发【答案】:B3.2024年2月3日从深空探测实验室获悉,我国将发射()通导技术试验卫星,双星将在月球轨道编队飞行,实施月球轨道通信导航新技术验证。
A."东风一号""东风二号"B."天都一号""天都二号"C."天舟一号""天舟二号"D."天宫一号""天宫二号"【答案】:B4.2024年4月25日20时59分,搭载神舟十八号载人飞船的长征二号F遥十八运载火箭在酒泉卫星发射中心成功发射,叶光富、李聪、李广苏3名航天员顺利进入太空,以下有关神舟十八号载人飞行任务的说法正确的有几项?()①神舟十八号乘组三人均为"80后",都有过飞行员经历②是中国空间站应用与发展阶段的首次载人飞行任务1/ 14③此次执行运载任务的长征二号F运载火箭从1999年首飞至今,保持了100%的发射成功率④长征二号F运载火箭是我国现役唯一的载人运载火箭A.3项B.4项C.1项D.2项【答案】:A5.1974年,中国同()建交,2024年是两国建交50周年。
该国将接任中国-东盟关系协调国,两国关系发展面临新的重要契机。
A.菲律宾B.马来西亚C.韩国D.日本【答案】:B6.蜜蜂建筑蜂房的本领使许多建筑师感到惭愧。
但是,最蹩脚的建筑师从一开始就比最灵巧的蜜蜂高明的地方,是他在用蜂蜡建筑蜂房以前,已经在自己的头脑中把它建成了。
2023年中考物理题型专项训练:材料阅读题
材料阅读题1.请阅读《国之重器——综合极端条件实验装置》并回答问题。
国之重器——综合极端条件实验装置从人类第一次仰望星空,到试图用“中国天眼”破译日月星辰等天文现象的奥秘,从探究万物组成到利用扫描隧道显微镜透视物质的微观结构,都得益于实验条件的拓展和技术手段的进步。
在宇宙中,高温、高压、强磁场等极端环境比比皆是,而我们地球上的生活环境是一个相对温和的环境,要发现更多的新现象,就需要建造极端条件实验室,拓展研究空间。
所谓极端条件,指的是在实验室中人为创造出来特别低的温度、特别强的磁场、特别高的压强等(如图所示)实验条件。
通过创造极端条件,可以发现和揭示许多在通常条件下观察不到的奇异物质特性。
例如,某些物质在很低的温度时,电阻就变成了0(如铝在-271.76 ℃——即1.39 K——以下时电阻为0),这就是超导现象。
肩负原始创新重任的国之重器——国际首个综合极端条件实验装置布局在北京怀柔科学城,并已投入使用。
该项目拥有极低温(可达1 mK)、强磁场(可达32.35 T)、超高压(可达3.8×1011 Pa)和超快光场(时间分辨率可达10-18 s)极端条件实验装置。
科学家们将极端条件进行综合运用,大大拓展了物质科学的研究空间,为发现新物态、探索新现象、开辟新领域,创造了前所未有的机遇。
请根据上述材料,回答下列问题:(1)请写出我国综合极端条件实验装置中的一个极端条件:_________________________________________________________________________________。
(2)我国自主研制的载人潜水器“奋斗者”号成功完成了10 000 m的深潜试验,创造了中国载人深潜的新纪录。
超高压极端条件的压强约为“奋斗者”号在10000 m深海中(海水密度取1.0×103kg/m3)承受压强的________倍。
(填写正确选项前的字母)A.4 B.40 C.4 000 D.400 000(3)强磁场的产生需要大电流,但电流越大,导线的温度就会越高,通常会导致铝导线等熔化,给强磁场的产生带来限制。
机器的征途空天科技章节测试题及答案

机器的征途空天科技章节测试题及答案机器的征途空天科技章节测试题及答案1.1古代人类"疯狂"而"奇妙"的飞天幻想1、直升机的飞行原理来源于()A、风筝B、神火飞鸦C、弓箭D、竹蜻蜓答案:D2、神火飞鸦是()朝的一种火箭武器。
A、唐B、宋C、元D、明答案:D3、()是现代喷气发动机燃气涡轮的鼻祖。
A、走马灯B、风筝C、神火飞鸦D、竹蜻蜓答案:A4、【推断题】汉代卧褥香炉的香火随转动而转变方向。
()答案:X5、【推断题】直升机是达芬奇的重要制造之一。
()答案:1.2航空航天基本概念与飞行器类型1、航空器一般在距大地()以内活动。
A、200KMB、20KMC、50KMD、100KM答案:B2、火箭与导弹可以在()活动。
A、大气层内B、大气层外C、大气层内外D、太空中答案:C3、【多选题】航空航天是人类拓展()的产物。
A、平流层B、对流层C、大气层D、宇宙空间答案:C4、【多选题】航天可以分为()航天和()航天。
A、军用B、商用C、民用D、争论用答案:A5、【推断题】滑翔机属于轻于空气的飞行器。
()答案:X6、【推断题】平流层是唯一一个尚未有商业飞行器运行的空间。
()答案:1.3航空飞行器的历史变迁1、世界上最早的飞艇是由()制造的。
A、德国人B、英国人C、法国人D、美国人答案:C2、为使机械飞行获得成功,需要解决两个方面的问题,分别是()A、动力与平衡B、动力与升力C、(升力及动力)与平衡D、(动力及升力)与把握答案:D3、人类历史上第一次持续而有把握的飞行飞行了()A、100mB、260mC、340mD、520m答案:B4、1909年法国人布莱里奥驾驶()飞机飞越英吉利海峡。
答案: 单翼5、【推断题】航空飞行器在17世纪就得到了逐步的进展。
()答案:X6、【推断题】一战中,飞机作为一种新式武器得到了广泛应用,奠定了现代立体作战的基础。
答案:2.1运载火箭与导弹技术1、()领导研制成功V-2火箭,成为现代大型火箭的鼻祖。
四旋翼无人机设计

3 四旋翼无人机硬件系统设计 ......................................................................................... 9
3.1 微惯性组合系统传感器组成 ............................................................................... 9
3.1.1 MEMS 陀螺仪传感器................................................................................ 9
3.4.2 电机和电机驱动模块 ............................................................................. 12
3.4.3 机架和螺旋桨的选型 ............................................................................. 13
4.1.2 PID 控制算法设计 ................................................................................... 17
5 飞行器试验 ................................................................................................................... 19IIFra bibliotek目 录
2023届湖北省恩施土家族苗族自治州文斗民族初级中学毕业升学考试模拟卷物理卷含解析

2023年中考物理模似试卷注意事项:1.答题前,考生先将自己的姓名、准考证号码填写清楚,将条形码准确粘贴在条形码区域内。
2.答题时请按要求用笔。
3.请按照题号顺序在答题卡各题目的答题区域内作答,超出答题区域书写的答案无效;在草稿纸、试卷上答题无效。
4.作图可先使用铅笔画出,确定后必须用黑色字迹的签字笔描黑。
5.保持卡面清洁,不要折暴、不要弄破、弄皱,不准使用涂改液、修正带、刮纸刀。
一、单项选择题(本大题7小题,每题3分,共21分)1.如图所示的三个装置中,弹簧和小球均完全相同,弹簧和细线的质量均不计,一切摩擦忽略不计,平衡时各弹簧的长度分别为 L 1、L 2、L 3,其大小关系是A .L 1=L 2>L 3B .L 1=L 2<L 3C .L 1>L 2>L 3D .L 1=L 2=L 32.如图所示,1L 和2L 是两只相同的小灯泡,a 、b 是电流表或电压表,闭合开关S 后,若两灯都能发光,则A .a 、b 均为电流表B .a 、b 均为电压表C .a 为电流表,b 为电压表D .a 为电压表,b 为电流表 3.下列各选项中,完全正确的是 A .物理量的常见值 B .电学仪器及用途 C .重力的三要素 D .杠杆分类 光速 340m/s 电能表 测电能大小 大小 G=mg 省力杠杆 瓶起子 安全电压 36V 验电器 验证负电荷 方向 垂直向下 等臂杠杆 托盘天平 大气压强 105Pa测电笔 辨别正负极作用点物体重心 费力杠杆钓鱼杆A .AB .BC .CD .D4.如图所示电路,下列说法正确的是A.闭合电键S后,将滑片向右移动,电压表示数将变小B.闭合电键S后,将滑片向左移动,电流表示数将变大C.断开电键S后,将滑片向右移动,电流表示数将变小D.断开电键S后,将滑片向左移动,电压表示数将不变5.小关与同学们去游觉桂林两江四湖,登上游船后,船会下沉一些,那么()A.船的重力将减小B.水对船的浮力将减小C.水对船的浮力将增大D.水对船的浮力将保持不变6.电视节目中我们看到“特斯拉线圈”表演,表演者通过有关设备造出人工闪电,放出美妙的电火花.以下说法错误的是()A.表演者与“特斯拉线圈”构成了闭合回路B.表演者是在安全电压状态下演出的C.表演者的防护服里有金属丝,电流只是经过金属丝D.表演时发生了电能向光能、热能的转化7.在公共场所“轻声”说话是文明的表现,而在课堂上“大声”回答问题才能让老师听清楚.这里的“轻声”和“大声”是指声音的A.响度B.音调C.音色D.声速二、填空题(本大题7小题,共21分)8.在原子内部,核外电子绕原子核运动会形成一种环形电流,该环形电流产生的磁场使物质微粒(原子)的两侧相当于两个磁极.若图中箭头表示的是电子绕原子核运动的方向,则环形电流的右侧应为______极(选填“N”或“S”).9.在国家“光伏扶贫”项目中,小明家安装了太阳能发电系统。
(中文版)国际民航组织空中航行报告2014年版 ICAO-Air Navigation Report-2014

在非洲和印度洋地区实施 80 条基于性能导航的 用户优选航迹线 .......................................................... 45 亚洲和南太平洋减排举措(ASPIRE 项目) ................... 45 协作性的环境举措(印度洋减排战略伙伴关系项目) ... 46 空中交通服务设施间数据通信(AIDC) 在加勒比和北美地区的实施情况 .................................. 46 菲律宾飞行情报区的商业案例...................................... 47 阿联酋在运用灵活使用空域(FUA)方面的经验............ 47 区域导航、空域改进使得容量增加(阿联酋).............. 49 国际民航组织与业界和其他标准制定机构的伙伴关系 ... 49
目录
目录
执行摘要
业务概述....................................................................... 5 系统概述....................................................................... 6 国际民航组织实施支助包............................................... 7
下一步措施
全球空中航行报告一瞥 ................................................ 50 《全球空中航行报告》今后的一些步骤........................ 52
பைடு நூலகம்
CCAR-61部

中国民用航空总局民航总局令第137号民用航空器驾驶员、飞行教员和地面教员合格审定规则(1996年8月1日发布,2002年10月21日第一次修订,2004年12月16日第二次修订)CCAR-61R2中国民用航空总局令第 137 号《中国民用航空总局关于修订<民用航空器驾驶员、飞行教员和地面教员合格审定规则>(CCAR-61R1)的决定》已经2004年12月16日中国民用航空总局局务会议通过,现予公布,自2005年1月15日起施行。
局长杨元元二○○四年十二月十六日中国民用航空总局关于修订《民用航空器驾驶员、飞行教员和地面教员合格审定规则》的决定中国民用航空总局根据《中华人民共和国行政许可法》、《国务院对确需保留的行政审批项目设定行政许可的决定》和其他有关规定,决定对2002年10月21日以中国民用航空总局第115号令公布的《民用航空器驾驶员、飞行教员和地面教员合格审定规则》(CCAR-61R1)作如下修改:一、第61.7条定义(t)修改为:“(t) 考试员,是指由局方授权实施本规则要求的航空人员执照或者等级的定期检查、熟练检查、实践考试或者理论考试的人员。
考试员必须是局方的监察员、或者按照中国民用航空规章《民用航空飞行标准委任代表和委任单位代表规定》(CCAR-183FS)委任的驾驶考试员或者经局方批准的检查人员。
”二、第61.9条执照、合格证、等级和许可的要求(h)修改为:“(h) 对特定运行的年龄限制(1) 参与CCAR-121运行的驾驶员必须遵守CCAR-121对驾驶员年龄的限制。
(2) 年满60周岁的驾驶员执照持有人从事国际商业航空运输运行的航空器上担任驾驶员前应当得到运行所在国的允许。
”三、第61.13条按本规则颁发的执照和等级(d) 修改为:“(d) 对完成本规则所要求的相应训练并符合所申请等级要求的申请人,在其地面教员执照上签注下列相应的等级:(1) 地面教员执照种类:(i) 基础;(ii) 高级;(iii) 仪表。
法国造舰局首次完成无人机舰上自动降落试验

置 对准 降落 格栅 的 中心 。 S ADA 的跟 踪精度为3 0 厘 米 , 比仅 使用GP S 定位 的系统 精确得 多 ,
因此 总 的安全性 和可 靠性更有保障 。
S ADA具 有开放式体系结构 , 能很容易地 与任何垂 直起 降的UAV和 任意类型 的舰船集成
在 起 一 。
这 次试 验 的成 功 是 法 国造 舰局 和 奥地 利 西 贝尔 公 司 紧密 合 作 的结 果 , 其 中西 贝尔公
★ 法 国造舰局首次完成无 人机舰上 自动降落试验
据 法 国航 宇 防 务 网 2 0 0 8 年 1 0 月 1 4 日报 道 , 2 0 0 8 年
一
1 0 月 9 日和 l O 日 , 法 国造 舰 局 成 功地 使 一 架 旋翼 无 人 机 ( u AV ) 以 自动 模 式 在 一 艘 正 在 地 中海 航 行 的法 国海 军 驱 逐 舰 “ 蒙特 卡姆 ” 号上 完成 了降落 。
在 这 之 前 , 在 海 上 对 UAV进 行 舰 船 回收 的难 题 一 直 没 有解 决 , 由于 安全 方 面 的原 因 , UAV 的部 署受 到 了 限
制 。 之 前进 行 的试 验 方 案 仅 能 解 决UAV在 白天 及 平 静海
面 上 工 作 的可 靠性 , UAv 系统 目前面 临的两 个主要 问题 是要 解 决在昼 夜及 恶 劣天 气 条件下
2024年安全运行世界纪录诞生记(三篇)

2024年安全运行世界纪录诞生记11月18日,中国企业联合会、中国企业家协会在京发布中国企业新纪录,确认华能大连电厂创造了一项新的世界纪录———该厂3号机组自xx年6月22日小修启动后,到今年3月15日按计划停机转入中修,连续安全运行了633天!根据国际互联网权威数据库和有关电力方面的顶级网站记载,截至xx年,国际上同类型火电机组最长连续运行纪录为607天。
也就是说,华能大连电厂3号机组创造的这一成绩,为世界火电机组连续运行的最高纪录。
这一世界纪录是怎样诞生的呢?华能大连电厂分两期建设,共进口4台35万千瓦火电机组,分别于xx年和xx年正式投产。
投产后,他们就扎扎实实抓基础管理,早在xx年,就被原国家电力部命名为全国第一个“一流火力发电厂”。
这次创下世界纪录的是3号机组,此前,1号机组就创造了连续运行510天的国内最高纪录,时间是自xx年10月25日大修启动,至xx年3月18日按计划转入小修。
据统计,目前连续运行超过500天的机组,全世界仅十余台,而华能大连电厂就占两台。
机组要连续运行,设备管理是关键。
传统的检修管理模式是原电力部定的:一年两次计划检修(小修),三年一次大修。
上个世纪90年代初,华能大连电厂在国内率先打破传统检修管理模式,改为每年一小修,大修间隔由3年延长到4年。
近几年又把大修从4年延长到6年,2号机组的大修周期甚至延长到8年。
大修期延长一倍以上,科学地进行检修优化至关重要。
如对检修模式优化,他们实行计划检修、定期检修、状态检修、事故检修等多种检修模式并存的优化检修体制。
对主设备和重要辅助设备,通过计划检修和定期检修进行预防控制,对一些辅助设备,完全采用事故检修的方式。
对检修项目和措施优化,不是简单减项目,而是“有层次、有重点、特事特办”。
xx年,3号机组小修发现A/B侧主气门严重卡涩,他们分析后决定扩大检修项目,对主气门解体检查,果然发现大量金属氧化锈垢。
实事求是、严格管理,华能大连电厂积累、建立了一套科学方法,把基础管理工作越做越细。
出镜记者与现场报道智慧树知到答案2024年武汉学院

冲上云霄——飞机鉴赏上海工程技术大学智慧树知到答案2024年第一章测试1.中国的航空之父是冯如。
A:√ B:×答案:A2.飞机最适宜的飞行环境是对流层。
A:√ B:×答案:B3.给机翼除冰的主要目的是减重。
A:√ B:×答案:B4.飞机的推力一定要大于重力,飞机才会升空。
A:× B:√答案:A5.国产飞机新舟60是没法飞入平流层去的。
A:√ B:×答案:A6.直升飞机也是飞机。
A:× B:√答案:A第二章测试1.当前民航客机中,机身最长的是波音748,长达76.4米。
A:× B:√答案:B2.翼尖小翼也属于飞机的操纵面。
A:× B:√答案:A3.当前民航客机中,翼展最长的是A380,长达79.8米。
A:√ B:×答案:A4.民航客机起落装置大多都是可收放式的。
A:× B:√答案:B5.国产新舟60飞机用的是活塞式发动机。
A:√ B:×答案:B6.方向舵控制飞机的偏航。
A:√ B:×答案:A第三章测试1.海关和警察部门使用的飞机属于军用飞机。
A:× B:√答案:A2.创造了三马赫飞行速度和三万米飞行高度奇迹的战机是U2。
A:√ B:×答案:B3.中国当前没有空中加油机。
A:√ B:×答案:B4.第一代战斗机的特点是追求高空高速。
A:× B:√答案:A5.幻影III属于第三代战斗机。
A:√ B:×答案:B6.F-14雄猫是一款变掠翼舰载机。
A:√ B:×答案:A第四章测试1.波音717问世早于波音727。
A:√ B:×答案:B2.A321是空客320家族中唯一的一款窄体机。
A:× B:√答案:A3.波音727是一款三发的飞机。
A:√ B:×答案:A4.P8海神反潜机是波音738改造的,所以也使用融合式翼尖小翼。
2023年科学中考热点90——警用装备博览会(含答案)

2023年科学中考热点90——警用装备博览会【新闻背景】5月11日至14日,由公安部主办的第11届中国国际警用装备博览会在北京举行,展区面积5.34万平方米,设置三馆两区。
警博会上,以新一代信息技术、人工智能、新材料为代表的前沿警用装备纷纷亮相。
【试题汇编】1、5月11日至14日,由公安部主办的第11届中国国际警用装备博览会在北京举行。
这个名叫猎犬的城市反恐机器人上装了8个微型摄像头,可以快速攀爬楼梯,有效侦查、吸引和打击目标,还可以搭载多种武器系统。
下列有关反恐机器人的说法错误的是()A.机器人的质量小,惯性小,运动状态易改变B.机器人的体积小,惯性小,运动状态易改变C.机器人的激光指示器利用了光的直线传播的原理D.机器人装有履带是为了增大受力面积,减小压强2、5月11日至14日,由公安部主办的第11届中国国际警用装备博览会在北京举行。
如图所示一架警用无人机搭载一个微型摄像机拍摄违章画面,来自景物的光通过摄像机的镜头在感光片上形成景物的实像。
当无人机上升时,为了拍摄到清晰的画面,应使镜头与感光片的距离()A.增大 B.不变 C.减小 D.无法判断3、5月11日至14日,由公安部主办的第11届中国国际警用装备博览会在北京举行。
如图所示,这是一款测温5G警用巡逻机器人,它装有5个高清摄像头,可实现全景无死角巡逻另外可实现5m以内红外线快速测量体温,下列有关说法正确的是()A.摄像头拍摄到的是倒立、缩小的虚像B.在拍摄时,人到摄像头的距离在一倍焦距和二倍焦距之间C.当被拍摄的人远离摄像头时,人经摄像头成的像会变小D.红外测温利用的是人的体温越高,辐射的红外线越弱4、5月11日至14日,由公安部主办的第11届中国国际警用装备博览会在北京举行。
警用摩托车的前后车轮轴之间的距离L比一般的摩托车要大,这样的设计主要是考虑了()A.车体的强度B.车体的稳定性C.驾车行驶的速度D.更好驾驶性能5、5月11日至14日,由公安部主办的第11届中国国际警用装备博览会在北京举行。
智能与无人驾驶船舶的发展现状与趋势
智能与无人驾驶船舶的发展现状与趋势0 引 言随着云计算、物联网和大数据的迅猛发展,第四次工业革命已经到达了一个全新的阶段,而一场全面的智能化革命则已萌芽,智能化汽车、飞行器、火箭以及其他交通运输设备都将陆续投入使用。
随着科技的不断发展,无人驾驶船舶逐渐成为航运业的新趋势。
无人驾驶船舶具有许多优点,例如提高效率、降低成本、增强安全性等,因此备受关注。
随着未来科学的进步,我们可以预见无人驾驶船舶将会成为可能。
然而,目前,世界各地的海上安全法律法规仍未明确,比如禁止使用未知的无人船、安排相关的保险措施、ACK 可能的事故原因等。
据专家估算,第一艘真正的无人驾驶船只有望出现,它的规模最初仅有500 t,但随着技术的不断发展,这种自主控制的无人远洋货船也有望在10~15年内普及。
一般而言,无人船的发展历程可以概括为“采集感知”“辅助决策”“远程控制”和“全自动无人驾驶”4个阶段,它们分别是互联互通、系统整合、船岸一体和自主运行。
1 全自动无人驾驶的现状尽管目前无人船仍处于探索和发展的初级阶段,但是我们已经取得了一些进展,比如:建立了无人船标准体系、测试与验证体系,开发出了智能感知等核心技术,并且在自动驾驶技术的产业化应用上取得了长足的进步,使得无人驾驶船舶可以实现全面商业运营。
无论是美国、中国,欧盟、日本、韩国等国家和地区,还是瑞典奇异布朗-博韦里公司(ABB)、芬兰瓦锡兰公司、挪威康士伯集团公司等国际著名船舶和航运相关企业,都将无人船研制作为当前及未来的研发重点,加快在该领域的布局,力图抢占技术制高点。
过去两年,欧盟为“海上智能航行”《航行安全》计划提供480万美元的支持,旨在检测和评估无人驾驶航行器的实际应用能力。
此外,美国的军事无人机系统也取得了长足的进步,经过改进和升级,它们的功能和效率都能够满足商业应用的需求。
随着科技的不断发展,我国正努力推动智慧和无人驾驶技术的发展,以便抢占未来的航海技术革命制高点。
青海省西宁市海湖中学2023-2024学年高二下学期第二阶段考试地理试卷(含答案)
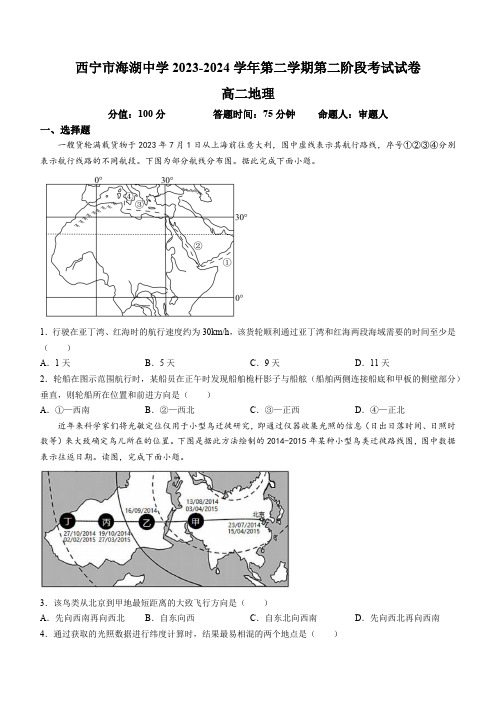
西宁市海湖中学2023-2024学年第二学期第二阶段考试试卷高二地理分值:100分答题时间:75分钟命题人:审题人一、选择题一艘货轮满载货物于2023年7月1日从上海前往意大利,图中虚线表示其航行路线,序号①②③④分别表示航行线路的不同航段。
下图为部分航线分布图。
据此完成下面小题。
1.行驶在亚丁湾、红海时的航行速度约为30km/h,该货轮顺利通过亚丁湾和红海两段海域需要的时间至少是()A.1天B.5天C.9天D.11天2.轮船在图示范围航行时,某船员在正午时发现船舶桅杆影子与船舷(船舶两侧连接船底和甲板的侧壁部分)垂直,则轮船所在位置和前进方向是()A.①—西南B.②—西北C.③—正西D.④—正北近年来科学家们将光敏定位仪用于小型鸟迁徙研究,即通过仪器收集光照的信息(日出日落时间、日照时数等)来大致确定鸟儿所在的位置。
下图是据此方法绘制的2014-2015年某种小型鸟类迁徙路线图,图中数据表示往返日期。
读图,完成下面小题。
3.该鸟类从北京到甲地最短距离的大致飞行方向是()A.先向西南再向西北B.自东向西C.自东北向西南D.先向西北再向西南4.通过获取的光照数据进行纬度计算时,结果最易相混的两个地点是()A.乙地和丙地B.乙地和甲地C.丙地和丁地D.丁地和乙地下图为中亚某区域等高线(单位:m)围,a、b、e分别代表甲湖三个不同时期的湖岸线,据此完成下面小题。
5.图中m,n两地的相对高差最大可接近()A.50m B.100m C.120m D.150m6.甲湖泊始终是淡水湖的原因最可能是()A.入湖河流盐度较低B.入湖河流补给量大C.有地下河与咸水湖相连D.纬度高,蒸发量少7.若a、b、c是甲湖泊三个不同时期的水面状况,则a最可能是()A.1月B.4月C.7月D.10月中微子是宇宙中一种可以自由穿透整个行星的基本粒子。
开展中微子监测等前沿物理科学研究的实验室大多建于矿井或隧道中。
2023年12月7日投入运行的中国锦屏地下实验室位于四川省锦屏山公路隧道中部侧向开挖的山体中,是目前世界上埋藏最深、规模最大的地下实验室。
某新型无人帆船的结构设计及翼帆气动性能分析

第36卷第2期2021年6月Vol.36No.2Jun.2021青岛大学学报(工程技术版)JOURNAL OF QINGDAO UNIVERSITY(E&T)文章编号:10069798(2021)02005406;DOI:10.13306/.10069798.2021.02.009某新型无人帆船的结构设计及翼帆气动性能分析赵大刚」,管殿柱夏涛2(1.青岛大学机电工程学院,山东青岛266071; 2.自然资源部第一海洋研究所,山东青岛266061)摘要:为了满足无人帆船在进行海洋调查时航时长、范围大和寿命高的要求,本文设计了一款新型无人帆船。
通过SolidWorks软件建立无人帆船的三维模型,并采用计算流体动力学(computational fluid dynamics,CFD)对翼帆的气动性能进行分析。
在考虑帆船航行实际工作状态的前提下,通过比较柔性帆、刚性帆和翼型对称截面与非对称截面的性能,确定了主帆为NACA0021,尾翼为NACA0018翼型的对称刚性帆,以提高帆船的气动性能。
同时,采用与飞机升降舵类似结构的尾翼控制翼帆与来流的攻角,极大地降低了控帆的难度与功耗。
为分析翼帆的气动性能,选用SST—模型在Fluent中进行模拟分析。
研究结果表明,翼帆的升力系数较大,空气流动平稳,并未出现涡流区,同时,翼帆表面压力呈现平滑的过渡现象,使气流可以平稳的从主帆表面分离,满足 设计要求。
该研究对使用无人帆船探索海洋具有重要意义。
关键词:无人帆船;结构设计;翼帆;气动性能中图分类号:U662.3;U664.31文献标识码:A随着全球经济的高速发展,煤炭、石油等不可再生能源的消耗在不断增多,人们逐渐将能源的开采重心从陆地转移到海洋[1]。
由于世界各国越来越重视对海洋环境的监测和海洋数据的采集,因此对海洋的探索和研究已成为目前自然科学的热点之一。
传统的海洋探索观测技术有人工出海考察、数据浮标和卫星观测等方法[2],但上述观测方法存在成本较高、机动性差和观测时间短等局限性。
航行试验大纲
根据船东及船检意见修改2003/3/281 / 10PAGEWEIGHTSCALE底 图 总 号旧 底 图 总 号DETAIL DESIGNSHIP NO. SHANGHAI MERCHANT SHIPDESIGN & RESEARCHINSTITUTESCHEDULE FOR MOORING TEST AND SEA TRAIL OFHULL PART船体部分系泊及试航试验大纲SDARIDATESIGNCOR. MARKS DATEDESIGNED CHECKEDVERIFIEDAPPROVED CHECKED OF STA.REVISION NO. DESCRIPTIONBYDATE旧底图总号CONTENTI SEA TRIAL OF HULL PART (3)I-1GENERAL (3)I-2T EST C ONDITION AND P LACE (3)I-3P ROGRESSIVE S PEED T RIAL (S EE T ABLE H-1) (3)I-4I NERTIA T EST(O NLY H1008),C RASH S TOP A STERN T EST AND C RASH S TOP A HEAD T EST(O NLY H1008) 4I-5T URNING C IRCLE T EST (O NLY H1008)(S EE T ABLE H-5) (5)I-6Z IGZAG M ANEUVERING T EST (S EE T ABLE H-6) (5)I-7C OURSE K EEPING T EST (S EE T ABLE H-7) (5)I-8S TEERING G EAR T EST (S EE T ABLE H-8) (6)I-9W INDLASS AND A NCHORING T EST (S EE T ABLE H-9) (6)I-10S TRUCTRURE TEST (7)I-11M EASUREMENT OF V IBRATION (S EE T ABLE H-10) (7)I-12N OISE M EASUREMENT (S EE T ABLE H-11) (7)I-13W ILLIAMSON T URN T EST(O NLY H1008) (8)I-14R ESCUE BOAT AND LIFE BOAT LAUNCHING TEST (S EE T ABLE H-12) (8)II SEA TRIAL OF MACHINERY PART (9)II-1.M/E STARTING TEST AND AUXILIARY BLOWER AUTO-STARTING / STOPPING TEST(MOORING TEST IF POSSIBLE) (9)II-2.M/E LOAD TEST AND F.O. CONSUMPTION MEASUREMENT (9)II-3.M/E M.D.O.&H.F.O. CHANGEOVER TEST (10)II-4.M EASUREMENT OF M/E LOWEST STEADY REVOLUTION(S EE T ABLE M-7) (10)II-5.M/E REVERSING TEST(S EE T ABLE M-8) (10)II-6.T EST FOR COMPOSITE BOILER (EXHAUST GAS SECTION)(S EE T ABLE M-9) (10)II-7. F.W. GENERATOR TEST (S EE T ABLE M-10) (11)II-8.S HAFTING TORSIONAL VIBRATION MEASUREMENT (11)II-9.A/E OPERATION TEST BY H.F.O. AND M.D.O.&H.F.O. CHANGEOVER TEST (11)II-10.R EMOTE CONTROL OF M AIN E NGINE TEST. (11)II-11.E NGINE SIDE EMERGENCY MANEUVERING (14)II-12.A UTOMATIC UNMANNED ENGINE ROOM’S FUNCTION TEST (14)II-13. B ALLAST PUMPING TEST TO PROVE PUMPING VAPACITY AND EFFICIENCY DURING TRANFERING BALLAST WATER (15)II-14.O VERHAULING FOR M/E (15)III.SE A TRIALS OF ELECTRIC PART (16)III-1R ADIO &N AVIGATION AND I NTERIOR C OMMUNICATION E QUIPMENT(S EE T ABLE E-1) (16)III-2M AIN P OWER S TATION B LACK-O UT T EST(S EE T ABLE E-2). (17)III-3T HE PUBLIC ADDRESS, GENERAL ALARM & FIRE ALARM SOUND TEST (S EE T ABLE E-3). (17)III-4M.G.P.S T EST(S EE T ABLE E-4) (17)III-5I.C.C.P T EST (S EE T ABLE E-4) (17)III-6I NTERNAL COMMUNICATION SYSTEM(S EE T ABLE E-5) (17)III-7A LL ANGLES OF VISIBILITY FOR SIGNAL AND NAVIGATIONAL LIGHTS AS REQUIRED IN COLREGS ARE TO BE VERIFIED. (17)Ⅲ-8D EAD SHIP START(O NLY H1008)(S EE T ABLE E-6) (18)Ⅲ-9E LECTRIC LOAD MEASUREMENT (SEE T ABLE E-8) (18)底图总号旧底图总号main engine has run at stable outputs before the speed measurement commences. During speed measuring within test section course deviation shall be not more than 2 degrees, steering angle shall be not more than ±5 degrees.(4)Speed-measuring methodThe trial speed is to be measured by DGPS. The output shaft power and revolution of main engine to be measured by torsion meter. The instruments which used in the test should have the certification of verification before speed trials.(5)Measurement recorda.Test time and water depth of every trip.b.Wind velocity and direction, weather condition.c.Ship’s speed, revolutions, power of M/E (rpm) and indicator horsepower of every trip.(6)Ship’s speed calculationShip’s speed at design dra ft (16.5m) to be obtained from the following formula:V TD = V TB * V MD / V MBin the formula:V TD –actual speed at design draft.V TB –actual speed at ballast draft.V MD –model test speed at design draft inV MB –model test speed at ballast draft.I-4 Inertia Test, Crash Stop Astern Test and Crash Stop Ahead Test(1)Inertia Test (Only H1008) (See Table H-2)When ship is going full ahead at normal rpm (86.2 r/min), give an order to stop main engine. When ship’s speed reduces to the speed abt. 5kn the test is finished. During the test the course heading should be kept by changing the rudder angle. Measure and record the distance and time from the order of stop M/E to the ship’s speed reduce to 5kn.(2)Crash stop astern test (See Table H-3)When ship is going full ahead at normal rpm (86.2 r/min), give an order to make main engine run astern (63r/min). When ship’s speed reduces to the speed abt. 0kn the test is finished. During the test keep rudder angle at 0 degree. Measure and record the distance and time from command full astern to the ship’s speed reduce to 0kn.(3)Crash stop ahead test (Only H1008) (See Table H-4)When ship is going astern with 63r/min of main engine, give an order to make main engine run ahead(86.2 r/min). When ship’s speed reduces to the spe ed abt. 0kn, the test is finished. During the test keeprudder angle at 0 degree. Measure and record the distance and time from command full ahead to the ship’s speed reduce to about 0kn.底图总号旧底图总号I-5 Turning Circle Test(Only H1008) (See Table H-5)(1)Test methodWhen the steering gear is in the condition of double pump working, the test should be done at full speed (91r/min), harbor full speed (68r/min)and harbor half speed(55r/min)respectively:a.The rudder angle is turned to hard starboard (35degree) and held until t he ship’s heading anglechanges to 540 degree, the test is finished.b. Resume the straight course until the speed recovery.c. The rudder angle is turned to hard portside (35degree) and held until the ship’s heading anglechanges to 540 degree, the test is finished.d. Resume the straight course until the speed recovery.(2)Measurement record the transfer distance, advance distance, turning diameter and maximum heelingangle.I-6 Zigzag Maneuvering Test (See Table H-6)(1)Test methodWhen the vessel is running ahead (91r/min), the test is to be carried out in accordance with following steps:a.The rudder angle is turned from its zero position to 10︒ starboard and held until the course of thevessel changes to an angle of 10︒ starboard to the original course;b.The rudder angle is turned from 10︒ starboard to 10︒ port and held until the course of the vesselchanges to an angle of 10︒ port to original course;c.The rudder angle is turned from 10︒ port to 10︒ starboard and held until the course of the vesselchanges to an angle of 10︒ starboard to original course:d.The rudder angle is turned from 10︒ starboard to its zero position and held until the vessel runs inoriginal course.(2)Measurement recorda.M/E revolution.b.Initial vessel speed.c.Time of every stage and course angle.I-7 Course Keeping Test (See Table H-7)During sea trail, check the course stability:(1)Keep the steering tiller unchanged while the vessel is sailing full ahead (91r/min) with steering by hand.Record the reading of GYROCOMPASS with the interval of 30 seconds. Measurement will be continued for 3 minutes, one time for fair and counter current respectively.(2)The vessel is sailing full ahead (91r/min) and to be ensured to keep the course. Measure the times ofsteering for keeping the course and the max. Rudder angle. Measurement will be continued for 3 minutes, one time for fair and counter current respectively.底图总号旧底图总号I-8 Steering Gear Test (See Table H-8)(1)Main engine is controlled in wheelhouse, and maneuver handle to be put in the position of ahead andfull speed (91r/min). Steering test to be done in wheelhouse. Operate the hydraulic pump No.1 or No.2 respectively, do the test by putting the rudder angle from 0︒to 35︒starboard/from 35︒starboard to 35︒port/form 35︒port to 0︒/from 0︒to 35︒port/from 35︒port to35︒starboard/from 35︒starboard to 0︒. Measure ship’s heeling angle. The time required to put the rudder from 35︒of one side to 30︒of another side shall not exceed 28 second.(2)Main engine to be put on the status of ahead and full speed, running two hydraulic pumps, test thecapability of putting the rudder from 0︒to 35︒starboard/from 35︒starboard to 35︒port/form 35︒port to 35︒starboard/ from 35︒starboard to 0︒.Following data to be recordeda.Weather, sea condition.b.Time required for each moving rudder.c.Maximum oil pressure in hydraulic cylindersd.Maximum current of motor.(3)Emergency steering gear testTo test the emergency steering effectiveness in stee ring gear room with ship’s running at half speed (M/E abt 76r/min) but not less than 7Kn.By turning the pump control handle make the rudder angle changed from 0︒ - 15︒ starboard - 15︒ port - 0︒one time. Measure the time of steering from 15︒ starboard to 15︒ port. It should not exceed 60 second.(4)Auto pilot effectiveness testDuring the main engine endurance test, do the test with No.1&No2 steering system respectively.--NFU (manual) steering--HAND (following) steering--AUTO (automatic) steeringSet up a heading course, navigate with auto pilot, and observe the keeping course capacity with course recorder. Then do the test of changing heading course.I-9 Windlass and Anchoring Test (See Table H-9)(1)An anchor-ground with more than 82.5 meter depth shall be selected under a calm sea condition and thebow in the upwind.(2)Each anchor is to be let go down gradually to the surface of the water.(3)Five shots of chains of one side anchor is to be let go down freely. During this process manually brake.Check the reliability of the brake system.(4)One side anchor is to be hoisted. During hoisting process, average speed of hoisting anchor to bemeasured and recorded. (by measuring No.2 and No.3 shot of chain ) , The average speed is not less than 9m/min. Then hoist the anchor up to bell mouth with windlass.底图总号旧底图总号2.3.2 The report on chemical analysis and low calorific value to be submitted before this test.2.3.3 The ship should go straightly as possible during the F.O. consumption measurement.2.3.4 The measured F.O. consumption should be corrected according to the actual calorificvalue and ambient conditions, then be offered to owner for reference. (See Table M-6)2.4 M/E shaft power to be measured when F.O. consumption is measuring.II-3.M/E M.D.O. & H.F.O. changeover testM/E M.D.O. & H.F.O. changeover test to be executed as follows:M.D.O. --- H.F.O.(before M/E operating test for adjustment)H.F.O. --- M.D.O.(after M/E load test)II-4.Measurement of M/E lowest steady revolution(See Table M-7)M/E is adjusted to the lowest steady revolution by reducing revolution progressively atwhich the engine keep running for 5 minutes. Record the revolution of M/E andturbocharger, the graduation of the maneuvering handle and M/E fuel oil pump.Turnrudder angle to hard portside (35degree), observe change of the course.II-5.M/E reversing test(See Table M-8)M/E reversing test should be carried out while the engine running at the lowest steadyrevolution. The time for reversing should not be more than 15 seconds. The testincluding ‘ ahead –astern’ and ‘astern –ahead’ is not less than 3 times.II-6.Test for composite boiler (exhaust gas section) (See Table M-9)6.1 During M/E load test at NCR, the measurement of the evaporation of the compositeboiler (exhaust air section) to be conducted for one hour by flowmeter arranged at thedelivery side of the feed water pump. During evaporation test, composite boiler(oil-fired section) should not operate and the feed water to be kept stable.6.2 The soot blower of boiler to be tested.6.3 the safety valve popping test: Opening pressure of safety valve: 0.8 MPa6.4 Pressure accumulation test(The items tested at the mooring test stage will not be triedagain)The boiler pressure is not to rise more than 0.954 Mpa (6% above the maximum allowable working pressure) when the steam stop valve is closed under full firing condition for duration of 15 minutes. During this test no more feed water is to be supplied than that necessary to maintain a safe working water level.底图总号旧底图总号II-7.F.W. generator test (See Table M-10)7.1 During M/E NCR condition, F.W. generator to be running for one hour utilizing thewaste heat in the jacket cooling fresh water from M/E. Record the parameters asfollows:a)Vacuum and temperature of evaporation chamberb)Temperatures of cooling fresh water inlet and outletc)Temperatures of sea water inlet and outletd)Salinity in the distilled watere)Capacity(not less than 25 m3/24h,at NCR)f)Delivery pressure of sea water ejector pumpg)Delivery pressure of ejector7.2 In condition of voyage at low speed, F.W. generator to be running for function test withsteam(if some F.W. in outlet the test finished ).II-8.Shafting torsional vibration measurementThe test to be carried out from M/E lowest steady revolution to 91.0 r/min at intervals of5 r/min, and from 91.0 r/min to M/E lowest steady revolution at intervals of 5 r/min.Example: lowest steady revolution→30→35→40→45→55→60→65→70→75→80→85→91 r/min→lowest steady revolution。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2019年1月孟嗣斐等:柴电混合拖轮动力系统试验台设计及试验研究• 43 •动力;柴油发电机组单独提供动力;柴油发电机组
和主推进柴油机共同提供动力。
拖轮各工况综合燃
油消耗率试验结果如图9所示。
组用于日用负载的功率为100 k w ,计算可得:双 轴系柴电混合动力系统全年消耗柴油420. 89 H 通 过调研:常规动力2 940 kW 级拖轮全年消耗柴油
为485. 1 t +4-5]。
对比可知,使用柴电混合动力系
统,可节油13. 249,即64.21 t 柴油。
3结论
针对港作拖轮应用进行了柴电混合动力系统设
计,建立了柴电混合动力系统试验平台,可有效进
行柴电混合动力系统性能匹配试验。
柴电混合动力系统各模式下设备运行参数正
常,系统运行稳定;在自航模式下,电机推进模式
在700 (r • m irT 1)以下时较柴油机推进模式省油。
通过和相似船型的比较:使用柴电混合动力系
统,全年可节油13. 249。
参考文南犬
[1] 周庆波,何斌,邱爱华,等.基于定距舵桨的柴电混
合港作拖轮动力系统设计[J ].柴油机,2017, 39
(6): 30-33.
[2] Jaih A IJai >,7I1A 7I J ,_GUhA a. Development of
the hybrid tugboat system [J]. JI7E. 2014,49 (05).
[3] Kawasaki Heavy Industries Ltd. >awasaki hybrid propul
sion system [h ]. 2014.
[4] 张浩杰.关于港作拖轮节油的讨论[J ].中小企业管
理与科技,2008 (18): 45.
[5] 金宝燕,郑玄亮.液化天然气双燃料动力港作拖轮设
计研究[J ].船舶与海洋工程,2013 (2): 35-39.
瓦锡兰成功完成无人操作航行测试
科技集团瓦锡兰宣布其自动岸到岸(D o k -to D o k )航行解决方案顺利完成新一轮测试。
此次测试是通过一艘名为 “Folgefonn”号的渡轮完成的。
测试在挪威海事局(17A )现场监督下进行,渡轮在完全无人干预的情况下,在须要停靠 的三个港口之间实现完全不间断的自主航行。
瓦锡兰利用一系列轨迹和航点定位来控制船舶的航行。
船舶使用的自主控制器基于瓦锡兰现有的动态定位系统,可控 制船舶的航行速度,并控制其在预定航道上的位置及航向。
G 1JJ 被用作主要传感器,目前,正在测试采用Guidance Maine CyJcan A J 作为靠泊过程中的二级传感器。
挪威海事局项目经理1i *a aktorB ua 表示:“三天里,我们在现场目击了该项测试的全部过程,这是我们所见过的首个 船舶自主航行的全面演示,可以说是非常震撼。
毫无疑问,这项技术最终可以提高船舶靠泊和离泊操作的安全性及总体效 率。
当然,进一步的开发工作仍在进行中,但这套系统在目前阶段所表现出的稳定性给我留下了深刻的印象。
”
挪威运营商l o l d 公司旗下的“Folgefonn ”号渡轮全长85 m ,在2018年初就被用来进行瓦锡兰自动靠泊解决方案的 初步测试。
此船还配备有混合推进系统,通过无线通岸接头实现全电动控制,同时还采用了瓦锡兰的许多其他创新成果, 包括瓦锡兰无线感应电池充电解决方案及储能系统。
lo rled 公司技术经理Jigbj0rn Myrvang 表示:“我们很高兴与瓦锡兰合作开展这一激动人心的项目。
一套完全自主的岸 到岸解决方案将帮助我们在提高效率和安全性、降低燃油消耗量进而减少废气排放方面获得可观的增值效益。
我们认为, 瓦锡兰的这一解决方案为船员提供了关键支持,使他们能够尽可能高效地操作船舶。
”
投资基金挪威创新署(Innovation Norway )已向瓦锡兰和lo rled 注资,用于该自动靠泊技术的测试。
(Vivid
供稿)。