电力铁塔攀爬机器人的步态分析
攀爬机器人结构设计论文
攀爬机器人结构设计论文1塔架攀爬机器人结构设计1.1塔架攀爬机器人整体设计方案攀爬机器人攀爬的重要性能主要体现在与攀爬物体之间的接触方式,目前多数攀爬机器人采用吸盘式、负压式。
这两种方式适用于平面攀爬,不适合塔架攀爬,受尺蠖爬行启发设计并且制作了采用抓卡式攀爬机构的攀爬机器人。
攀爬机器人结构模块主要分为头部抓卡机构、前行臂和尾部抓卡机构。
头部、尾部抓卡机构由抓卡拉杆、压紧块、抓卡动力底盘、卡爪、红外检测传感器、头部抓卡体、高清摄像头、动力杆等部件组成。
前行臂由前行臂转动电机、前行臂1、前行臂2、前行臂3、推杆电机等部件组成。
铁塔攀爬机器人工作过程如下:初始,机器人前后抓卡机构同时夹紧高压塔架,前行臂处于收缩状态。
当机器人接收到来自地面控制台的执行命令后开始动作。
首先头部抓卡机构松开,直到压紧块接触到高压塔架结构型材,机器人前行动作由前行机械臂实现。
当前行臂伸展到达极限,头部抓卡机构开始卡紧高压塔架结构型材。
接着尾部抓卡机构开始松开,前行臂此时动作为收缩,尾部抓卡机构会随着向上移动。
当伸缩机构收缩到极限位置,尾部抓卡机构会再次卡紧高压塔架角钢,这样往复动作实现高压塔架攀爬机器人攀爬动作。
整个过程,攀爬机器人执行来自地面控制台的命令,动作可随时中断。
步进电机驱动丝杠副带动抓卡机构将机器人主体紧固在高压塔架上。
利用直线推杆电机带动连杆机构往复收缩,实现机器人的前行动作,机器人整体在高压塔架上攀爬过程。
A位置为机器人的初始位置,头部抓卡机构和尾部抓卡机构都处于卡紧状态。
B位置,尾部抓卡机构松开,为收缩做准备。
C位置,当收缩机构达到极限,尾部抓卡机构卡紧。
D位置,头部抓卡机构松开,为下一伸缩动作做准备。
E位置,伸缩机构再次到达极限位置。
下一状态会重复进入A状态所示位置。
1.2塔架攀爬机器人抓卡机构攀爬机器人抓卡机构的动力由步进电机的转动,带动丝杆副丝杆转动,将动力传递至卡紧托,利用卡紧托移动实现抓卡高压塔型材结构架,从而将机器人整机附着于高压塔架上。
电力铁塔攀爬机器人位姿综合误差分析
( 1 . S c h o o l o f M a n u f a c t u r i n g S c i e n c e a n d E n g i n e e r i n g , S i c h u a n U n i v e r s i t y , S i c h u a n C h e n g d u 6 1 0 0 6 5 , C h i n a ; 2 . C h e n g d u B r a n c h , F A W— V o l k s w a g e n A u t o m o t i v e C o m p a n y , S i e h u a n C h e n g d u 6 1 0 1 0 0 , C h i n a )
r o o t p o s e a n d p o s i t i o n e r r o r i s d e v e o l p e .A d c c o r d i n g t o t h e e r r o r od m el o ft h e r o b o t , a a p p l c i ti a o nb se a do n t e h M A T L A B h a s b e e n
T r a j e c t o r y P o s e a n d P o s i t i o n E r r o r A n a l y s i s o f t h e P y l o n C l i mb i n g R o b o t
输电铁塔攀爬机器人的结构分析与实验验证
输电铁塔攀爬机器人的结构分析与实验验证魏军英1张聪1王吉岱1张峰2(1山东科技大学机械电子工程学院,山东青岛266590)(2山东鲁能智能技术有限公司,山东济南250101)摘要首登输电铁塔检修人员缺乏完善的临时防坠保护装置,研发输电铁塔攀爬机器人替代首登人员登塔,可以保障登塔人员的人身安全。
根据实际作业环境及其功能要求,结合仿生学原理,提出了一种基于仿生蚕特征的攀爬机器人模型。
对机器人进行结构设计并分析攀爬过程中吸附的稳定性,建立机器人运动学模型;对其作业空间进行了仿真分析,验证了机器人结构的合理性。
试制物理样机并进行相关攀爬实验,实验结果表明,该机器人具有替代首登人员登塔的可行性。
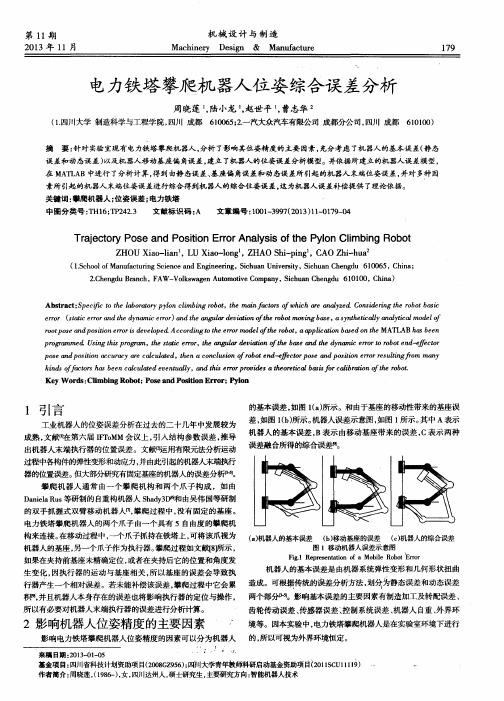
关键词攀爬机器人结构设计运动学分析实验验证Structural Analysis and Experimental Verification of Climbing Robotfor Transmission TowerWei Junying1Zhang Cong1Wang Jidai1Zhang Feng2(1College of Mechanical and Electronic Engineering,Shandong University of Science and Technology,Qingdao266590,China)(2Shandong Luneng Intelligence Technology Co.,Ltd.,Ji'nan250101,China)Abstract Due to lack of temporary falling protection device,the power transmission tower climbing robot is needed to research and developto replace the first climbing personnel to guarantee their safety.According to actual working environment and its functional requirements,a climbing robot model based on bionic silkworm characteristics is proposed in combination with bionic principles.The structure of the robot is designed and the adsorptionstability in the climbing process is analyzed.The kinematic model of the robot is established and the working space is simulated to verify the rationality of the robot structure.The physical prototype is manufactured and the relevant climbing experiments are carried out,the experimental results showing that the robot can re⁃place the personnel to climb the tower.Key words Climbing robot Structure design Kinematics analysis Experimental verification0引言输电线路、铁塔等长期暴露在空气中,常年受到台风、雨雪、温差等自然因素的影响,为了保证电力系统的安全稳定运行,需要人工登塔对铁塔及线路进行检测和维护[1]。
电力铁塔攀爬机器人直线推杆机构设计与分析_王蕾
3.2 电机直驱关节与直线推杆关节比较分析
限于篇幅所限,此处仅对机器人后爪吸附前爪松开且前臂
G1 Lcosα 2
+G2 Lcosα-Falsinβ=0
由几何关系可)
-2·3l·l·co(s α+15)
sinβ
sin(α+15)
(2) (3)
No.3
54
机械设计与制造
Mar.2012
Design and analysis of linear rod units for electricity pylons climbing robot
WANG Lei,LU Xiao-long,ZHAO Shi-ping,CAO Zhi-hua,LIU Xiao-yu,LIANG En-zhi (College of Manufacturing Science and Technology,Sichuan University,Chengdu 610065,China)
T2 =0.436Fa = 0.436Lcosα
G1 /2+G2 姨10-6co(s α+15) 3lsin(α+15)
(9)
电机直驱关节和直线推杆机构驱动电机的力矩关系为:
T1 =
3lsin(α+15)
T2 0.436姨10-6co(s α+15)
(10)
前臂与水平方向所成角度 α 变化范围[15°,105°],l=60mm,
机械设计与制造
第3期
52
Machinery Design & Manufacture
2012 年 3 月
文章编号:1001-3997(2012)03-0052-03
电力铁塔攀爬机器人直线推杆机构设计与分析 *
管道攀爬机器人结构设计及行走动力特性分析

虽然串联机器人动力学特性及结构优化设计已经取得了许多重要成果,但仍 然存在许多研究方向值得进一步探索。例如,如何建立更加精确、高效的动力学 模型,以满足实时控制的需求;如何将新型优化算法应用于结构优化设计中,以 获得更好的优化效果;如何提高机器人的柔性和自适应性,以适应更加复杂和动 态的环境等。
此外,随着和机器学习技术的快速发展,这些技术也开始被应用于串联机器 人的设计和控制中。例如,通过机器学习方法,可以实现对机器人的自适应控制、 故障诊断和维护等。这为串联机器人的进一步发展提供了新的机遇和挑战。
因此,在未来的研究中,可以综合考虑这两种方法,设计一种混合式的控制 策略,以实现机器人在不同条件下的稳定攀爬。此外,还可以进一步研究机器人 感知和决策等方面的技术,以提高机器人在复杂环境中的自主能力。
感谢观看
控制算法
管道攀爬机器人的控制算法包括位姿估计、轨迹跟踪等。位姿估计是指对机 器人在管道中的位置和姿态进行估计,通过对传感器数据的处理和分析来实现。 轨迹跟踪是指根据位姿估计结果,控制机器人按照预设的轨迹行走,通过对电机 进行控制来实现。
在控制算法的设计过程中,需要考虑机器人的作业效率和安全性。为了提高 作业效率,需要缩短位姿估计的时间,提高轨迹跟踪的精度。为了确保安全性, 需要加入防抖动和异常情况处理等功能,以避免机器人在行走过程中出现问题。
爬杆机器人是一种能够在垂直杆上自主攀爬的机器人,这种机器人在电力线 路巡检、救援、建筑等领域有广泛的应用前景。然而,要实现机器人的自主攀爬, 需要解决一系列的关键问题,包括对环境的感知、运动规划、控制策略等方面。 在本次演示中,我们将重点探讨爬杆机器人的攀爬控制。
机器人攀爬控制是实现自主攀爬的关键技术之一。在攀爬过程中,机器人需 要通过对环境的感知,获取关于杆子位置、姿态等信息,再根据这些信息调整自 身的运动状态,实现稳定的攀爬。在这个过程中,控制算法起着至关重要的作用。
攀爬电力铁塔机器人的爬行方案设计
攀爬电力铁塔机器人的爬行方案设计
李红卫; 赵世平; 陆小龙
【期刊名称】《《制造业自动化》》
【年(卷),期】2010(032)011
【摘要】目前电力特种机器人的研究主要集中在巡线机器人方面,用于巡检电力铁塔的机器人还鲜有成果。
攀爬电力铁塔机器人爬行方案的设计,是研制攀爬电力铁塔机器人的基础。
本文通过分析比较几种爬行机构,结合攀爬电力铁塔机器人的性能要求及工作环境确定了该机器人的一种爬行方案。
【总页数】5页(P100-103,121)
【作者】李红卫; 赵世平; 陆小龙
【作者单位】四川大学制造科学与工程学院成都 610065
【正文语种】中文
【中图分类】TH113
【相关文献】
1.电力铁塔攀爬机器人位姿综合误差分析 [J], 周晓莲;陆小龙;赵世平;曹志华
2.电力铁塔攀爬机器人直线推杆机构设计与分析 [J], 王蕾;陆小龙;赵世平;曹志华;刘晓宇;梁恩志
3.基于FPGA的电力铁塔攀爬机器人视觉系统设计 [J], 庄红军; 李军; 周海; 候永洪; 莫刚; 钟以平
4.新型电力铁塔攀爬机器人的设计及攀爬步态分析 [J], 刘帅;庄红军;高宏力;鲁彩江
5.电力铁塔高效攀爬机器人机械系统设计与物理样机开发 [J], 邹德华;彭沙沙;刘兰兰;江维;张宏伟
因版权原因,仅展示原文概要,查看原文内容请购买。
输电铁塔攀爬机器人夹持机构的设计与分析
第43卷第11期输电铁塔攀爬机器人夹持机构的设计与分析47文章编号:1004-2539(2019)11-0047-07D01:10.16578/j.issn.1004.2539.2019.11.008输电铁塔攀爬机器人夹持机构的设计与分析赵慧如'鲁守银'石利荣2(1山东建筑大学信息与电气工程学院,山东济南250101)(2云南电网公司曲靖供电局,云南曲靖650000)摘要针对铁塔检修工人高空作业时手动挂拆安全绳危险性高和效率低的问题,基于菱形原理设计了一种V型角钢对称夹持机构,主要由夹持爪、外展机构和顶出机构组成,夹持爪通过螺旋升降机与滑动导轨的配合实现对角钢的抓紧,垂直于夹持手臂的外展机构通过调整其展出距离改变夹持爪的位置,顶出机构前端的V型块设计可保证机器人机身始终平行于角钢。
绘制机器人的Solid-Works三维模型,依据菱形原理简化模型,并验证其对中夹持性和机构设计的合理性,建立静力学模型,对夹持机构进行静力学分析和静力学仿真。
通过样机试验,验证了该夹持机构的可行性。
关键词攀爬机器人夹持机构菱形原理静力学建模静力学仿真Design and Analysis of Clamping Mechanism for Transmission Tower Climbing RobotZhao Huiru1Lu Shouyin1Shi Lirong2(1College of Information and Electrical Engineering,Shandong Jianzhu University,Ji z nan250101,China)(2Qujing Power Supply Bureau of Yunnan Power Grid Corporation,Qujing650000,China)Abstract In view of the high risk and low efficiency of the manual maintenance of the safety rope during the work of the tower,the V-shaped angle steel symmetrical clamping mechanism is designed based on the principle of rhombus principle.It is mainly composed of a gripping hand,an abduction mechanism and an ejection mechanism.The clamping hand realizes the grasping of the diagonal steel by the cooperation of the screw jack and the sliding rail,and the abduction mechanism perpendicular to the clamping arm changes the position of the gripping hand by adjusting the exhibition distance thereof,and the V-shaped block on the front end of the ejec-tor mechanism ensures that the robot body is always parallel to the angle.According to the analysis of the climb・ing environment of the transmission tower climbing robot,the three-dimensional model of the mechanism is drawn.The model is simplified according to the principle of rhombus principle and the rationality of the centering and the size of the mechanism is verified.The statics model is established and the clamping force is used for mechanical analysis and structural statics simulation.Through the prototype development and test,the feasibility of the clamping mechanism is preliminarily verified.Key words Climbing robot Clamping mechanism Rhombus principle Statics modeling Statics simulation0引言在我国,输电铁塔数量多、分布广,且长期显露于野外环境甚至多尘强风高湿的恶劣环境下叫传统方式下,由检修人员背负检修设备沿脚钉侧攀爬输电杆塔,逐步挂接安全绳防坠,手工记录逐塔巡视,导致巡检周期长,攀爬危险性大。
电力铁塔攀爬机器人直线推杆机构设计与分析
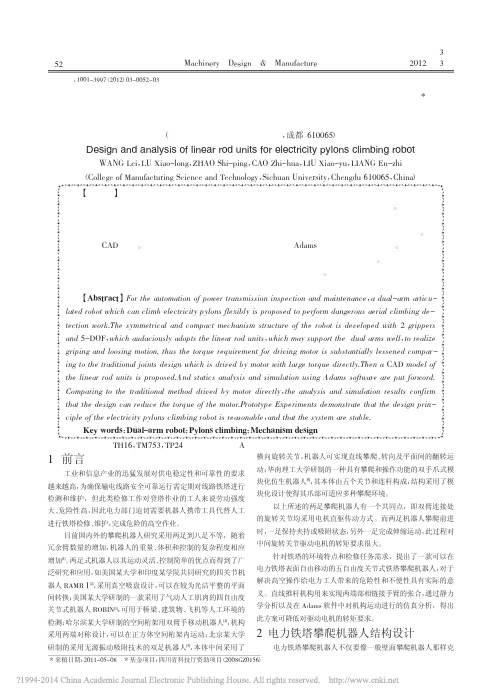
图 1电力铁塔攀爬机器人及机构简图
机器人两臂上端通过安装轴连接 ,直线推杆机构一端与前
臂铰接 , 另一端和后臂铰接。 手臂下端与手臂旋转关节相连 , 可使 手臂绕旋转轴旋转。 手臂旋转关节下端和位于手爪上部的手爪旋
转关 节 相连 。
(
电力铁 塔攀爬机 器人的运动包 括直线攀爬运 动和转 向运
; goh td i a o td i h hs re b t i g tqe icy hn A dl { n er i n jis eg w i d v m ow h a eo u de lTe C Dm eo tt a t l n s n c i i d y r t l r r t. 0 o o r o f lt nar i i r o d n ac aa s d iu i i dm ¥ wr a ufr r 2 e i r o u t s o s . d ti l ia m l o u n A a s o a e to o . h l d ns p e A s s y s s a n g e p t n n t s l f e p r wd }Cm an e r i n t d re t icy a l iad iu i s tca { op i t t a t a m h i d ym o de l n ys m l o r us o r g o h t i l o dv b o r r t , d o e a s s a n e l t n t i
} 【br tF t a nfo ramsnnei d atae d —m ru { Asa 】ot ao t p et sioi c nnmi nc 血u a t 一 tc r eum i o w n s s t a n n , a r ac h o r i p o e l i
高压输电铁塔攀爬巡检机器人
高压输电铁塔攀爬巡检机器人作者:李华强钱国强陈孝锋马闯来源:《科技风》2018年第09期摘要:随着经济的发展,在“十三五”背景下国家更加重视电网的建设,并且高压输电线路的应用更加广泛,但是由于高压输电铁塔的特征,检修工作存在很大的挑战,对此可以使用机器人开展巡检工作。
基于此,本文将阐述攀爬巡检机器人的效用,分析其技术方案以及优化方案,旨在完善攀爬巡检机器人的功能,降低巡检工作的难度,促进国家电网的发展。
关键词:高压输电;攀爬巡检;机器人电力的稳定、安全是促进各行各业发展的基本保障,对此为了能够有效的提高电力的安全性,就应该加大对高压输电铁塔的检测、检修等工作的重视程度。
在电网的建设中,输电塔的材质基本上都是角钢,而检修与维护均需要人力完成,不仅影响工作人员的安全,还加大了劳动强度。
因此,在科技如此发达的背景下,可以研发巡检机器人,实现自动检测、维护的目的,保护工作人员的安全。
一、高压输电铁塔攀爬巡检机器人的效用众所周知,高压输电铁塔的巡检工作由于环境、设备的特点,使得人员的在工作面临着一定的挑战,甚至存在高空掉落的风险。
所以,为了能够有效的解决高压输电铁塔检修工作存在的问题,应该大力发展并应用自动化技术——攀爬巡检机器人。
具体而言,攀爬巡检机器人就是以矩形框架结构的形式设计其手爪,而这样的设计并能够加大机器人与铁塔之间受力面积,进而降低脱落的可能性,保障工作的质量与效率。
在应用的过程中,攀爬巡检机器人能够铁塔上自主的攀爬,当机器人攀爬至输电塔主材的输电塔上时,攀爬巡检机器人在牵引模块的牵引下实现连接。
基于这一前提,攀爬巡检机器人能够在运行的过程中开监测、维护的工作,甚至能够将监测的设备安装在制定位置,实现了实时监测输电铁塔状态的目的,以便能够及时排除输电中存在的安全隐患,提高输电的稳定性。
二、高压输电铁塔攀爬巡检机器人的技术本文中的高压输电铁塔攀爬巡检机器人,主要包括伸缩模块、第一夹持模块与第二夹持模块,无论哪一个夹持模块中,其两侧均设置了牵引模块,该牵引模块能够驱动伸缩模块运动,进而带动第一夹持模块、第二个夹持模块移动,实现攀爬。
电力铁塔攀爬机器人工作空间的3种求解方法_刘晓宇
人的直线移动; 双臂下端与俯仰关节旋转轴相连, 可使 手臂绕旋转轴俯仰, 实现越障功能; 与俯仰关节固连的 爪部旋转关节采用 1 级带轮和 3 级齿轮传动实现机器 l1 和 l2 分别表示两手臂长度, 人的转向运动。 均为 300 mm; θ1 ~ θ5 分别表示 5 个关节的旋转角度, 其单独变 化范围如下:
180 ° ] , 20 ° , 60 ° ] , 60 ° , 150 ° ] , θ1 ∈ [- 180 ° , θ2 ∈ [ θ3 ∈ [ 20 ° , 60 ° ] , 180 °] θ4 ∈ [ θ5 ∈ [- 180 ° ,
, 工作空间是指机器人正常工作时 ,
末端执行器上参考点所能达到的空间点的集合 , 其大 小代表了机器人的活动范围, 是机器人结构优化设计、 轨迹规划和运动控制的基础。鉴于工作空间是从几何 也 方面衡量机器人工作能力的主要运动学指标之一 , 是设计机器人的重要依据
[2 ]
, 因此机器人的设计首先
图1
电力铁塔攀爬机器人 CAD 模型
必须满足工作空间的要求。
2
机器人工作空间分析
目前, 机器人工作空间的求解方法主要有解析法 、
1
电力铁塔攀爬机器人构型介绍
电力铁塔攀爬机器人是采用电磁铁作为其附着机
图解法及数值法
[3 ]
。 解析法是通过多次包络来确定工
构的 5 自由度关节式机器人, 如图 1 所示, 机器人由双 臂、 电动缸、 俯仰关节和爪部旋转关节组成。 电动缸通 过丝杆螺母传动实现伸缩以驱动双臂张合 , 完成机器
( a) 工作空间三维图
( b) xOy 平面投影图
12
机
械
设
计
第 29 卷第 5 期
输电铁塔损伤检测机器人攀爬越障部分的结构优化设计
第2 4卷 第 1期 21 0 1年 3月
江西 电 力职 业技 术 学 院 学 报
J u a fJa g i c t n l n e h i a l g fE e t c t o r lo i n x n Vo ai a d T c n c lCol e o l cr i o a e i y
关 键 词 : 电铁塔 ; 输 检测机器人 ; 攀爬 ; 障; 动分析 越 运
中 图 分 类 号 :P4 T 22
文 献 标 识 码 : A
文 章 编 号 :6309(0 10—040 17—072 1)100— 8
据 国家电 网 、 方 电 网统 计 , 国现 有 10 6 ) 南 我 1 (6 k V及 以上 高 压输 电线 路 约计 6 . 30 4万公 里 , 电铁 输
收 稿 日期 :0 0 1 — 3 2 1~ 2 2 作者简介 : 韩 俊 ( 9 6 ) 男 , 川绵 阳人 , 士 研 究 生 , 要研 究 方 向 : 18一 , 四 硕 主 机械 设 计 理 论 与方 法
越螺 栓等 障碍物 。 本 文设 计 的输 电铁塔损 伤检 测机器 人 的攀爬越 障部 分 由主伸缩 机构 、 紧机构 、 夹 抓手旋 转伸 缩机构 部分组 成 。检 测部 分 由攀爬越 障部 分携 带上塔进 行 检测 , 可安装 于攀爬 越 障部分 的外壳 上 , 能对攀爬
vc电力铁塔攀爬机器人夹持机构设计与分析
电力铁塔攀爬机器人夹持机构设计与分析陆小龙,赵世平*,廖俊必,曹志华(四川大学制造科学与工程学院, 四川成都, 610065)摘要:根据对电力铁塔攀爬机器人夹持机构的运动和受力分析,提出并设计了一种新型双V 字夹持机构,其夹持爪V 形槽角度固定,大小可变,双爪联动可从多个方向对不同规格角钢夹持。
建立了机构CAD 模型及数学模型,并对夹持力进行了动力学仿真。
实验室样机试验,结果验证了这种夹持机构能够从多个方向对宽度从80-220mm 不同规格的角钢进行可靠夹持,为攀爬机器人在电力铁塔移动提供可靠的夹持力。
关键词:电力铁塔;攀爬机器人;夹持机构;双V 字形 中图分类号:Design and Analysis of Clamping Mechanismfor Power Tower Climbing RobotLU Xiao-long, ZHAO Shi-ping *, LIAO Jun-bi, CAO Zhi-hua(School of Manufacturing Science and Engineering, University of Sichuan, Chengdu, P. R. China, 610065)Abstract : In order to fix a Power tower climbing robot on a tower reliably, a novel double -V-clamper is proposed in the paper. The gripping claw has an angle fixed V-groove and a variable length, so that it is possible to clamp angle bars with various specifications in different directions. The CAD and mathematical model of the clamping mechanism were suggested and the clamping force was simulated. Furthermore ,Prototype experiments were made in laboratory. The results show that the gripper can grasp angle bars firmly and reliably which widths vary from 80 to 220 mm in several directions, for the three-dimensional movement of the power tower climbing robots. Key words : power tower; climbing robot; clamping mechanism; double V-shaped基金项目:四川省科技厅资助项目(2008GZ0156) 作者简介:陆小龙(1982-),男,博士生. 研究方向:智能机器人技术及应用*通讯联系人高压输电线路是电力传输的主要载体,其安全运行越来越受到各级部门的重视。
110kV输电线路巡检机器人爬坡性能分析
110kV输电线路巡检机器人爬坡性能分析岳湘;王洪光;张成巍;李瀚儒【摘要】根据输电线路环境特点和巡检任务需求,提出了一种新型的输电线巡检机器人机构.分析了巡检机器人的爬坡性能,并提出了改进措施和方式.建立了机器人准静态力学模型和行走轮接触力学模型.通过行走轮结构优化,提高驱动轮附着力;机器人移动过程的姿态规划,合理分配了双轮的负载,从而提升机器人的爬坡能力.进行了仿真分析和实验室试验,结果表明通过改进行走轮结构和合理规划机器人行走姿态能够改善机器人的移动性能,提高了机器人爬坡能力.%A novel mechanism for power transmission line inspection robot is presented according to the requirements of inspection tasks and characteristics of obstacles on power transmission lines.The gradeability of the power transmission line inspection robot is analysed and improved by some measures.The quasi-static mode of the robot and the contact mechanics of the wheels are established.Adhesion force of the driving wheel can be impoved by optimizing the structure of the wheel and the wheel load is reasonably distributed by planning the posture of the robot.So the climbing ability perfornance is ameliorated.The climbing performance of the different wheel structure and the different posture are simulated.The simulation results demonstrate that the gradeability can be improved by the optimization of the wheel structure and the planning of theposture.Finally,the feasibility of inspection robot mechanism was verified by means of climping test.【期刊名称】《机械设计与制造》【年(卷),期】2017(000)003【总页数】4页(P56-59)【关键词】输电线路;机器人;移动性能【作者】岳湘;王洪光;张成巍;李瀚儒【作者单位】中国科学院大学,北京100049;中国科学院沈阳自动化研究所,辽宁沈阳110016;中国科学院沈阳自动化研究所,辽宁沈阳110016;广州供电局有限公司,广东广州510620;广州供电局有限公司,广东广州510620【正文语种】中文【中图分类】TH16;TP242输电线路的巡检对保证国家电力的安全稳定运行意义重大。
电力铁塔攀爬机器人的步态分析_曹志华
器寻找目标点的过程进行分析 , 右爪相对于左爪的位
姿可以用一个矩阵来描述 , 即 T = n o a p , 其 00 01
中(n , o , a)描述右爪的姿态矢量 , p 为右爪的位置矢 量[ 8] .
考虑到两机械手臂之间的角度变化与电动缸的
状态存在一一对应的关系 , 在运动学分析过程中 , 假
文章主要对机器人的机械结构 、运动学及攀爬步 态进行了分析 , 通过仿真计算和比较了两种步态攀爬 铁塔不同方位下各关节的转矩以及系统的能耗 , 为机 器人的攀爬步态规划提供了依据 .
1 机器人机构设计
图 1 所示为铁塔攀爬机器人的 CAD 模型和结构 简图 .机器人主体由铰接在一起的两个机械手臂组
第 45 卷 第 8 期 2011 年 8 月
JO
U
西 安 RNAL OF
交 通 大 学 学 报 XI′AN JIAOTONG UNIVERSIT
Y
Vol .45 No .8 Aug .2011
电力铁塔攀爬机器人的步态分析
曹志华 , 陆小龙 , 赵世平 , 王蕾 , 梁恩志 , 刘晓宇
(a)机器人的 CAD 模型 (b)结构简图 图 1 铁塔攀爬机器人的 CAD 模型和结构简图
2 机器人攀爬过渡运动分析
机器人攀爬时 , 一端爪部的电磁铁吸附角钢以支
撑整个系统 , 另一端爪部运动到目标位置和姿态进行
吸附 , 吸附后松开前一爪部 , 两个爪部交替吸附 , 实现
攀爬过程 .本文针对机器人左爪吸附 、右爪作为操作
Gait Analysis for Electricity Pylon Climbing Robot
CAO Zhihua , LU Xiaolong , Z HAO Shiping , WANG Lei , LIANG Enzhi , LIU Xiaoyu
高压输电铁塔攀爬巡检机器人
DOI:10.19392/ki.1671-7341.201809073高压输电铁塔攀爬巡检机器人李华强㊀钱国强㊀陈孝锋㊀马㊀闯南京工程学院㊀江苏南京㊀211167摘㊀要:随着经济的发展,在 十三五 背景下国家更加重视电网的建设,并且高压输电线路的应用更加广泛,但是由于高压输电铁塔的特征,检修工作存在很大的挑战,对此可以使用机器人开展巡检工作㊂基于此,本文将阐述攀爬巡检机器人的效用,分析其技术方案以及优化方案,旨在完善攀爬巡检机器人的功能,降低巡检工作的难度,促进国家电网的发展㊂关键词:高压输电;攀爬巡检;机器人㊀㊀电力的稳定㊁安全是促进各行各业发展的基本保障,对此为了能够有效的提高电力的安全性,就应该加大对高压输电铁塔的检测㊁检修等工作的重视程度㊂在电网的建设中,输电塔的材质基本上都是角钢,而检修与维护均需要人力完成,不仅影响工作人员的安全,还加大了劳动强度㊂因此,在科技如此发达的背景下,可以研发巡检机器人,实现自动检测㊁维护的目的,保护工作人员的安全㊂一㊁高压输电铁塔攀爬巡检机器人的效用众所周知,高压输电铁塔的巡检工作由于环境㊁设备的特点,使得人员的在工作面临着一定的挑战,甚至存在高空掉落的风险㊂所以,为了能够有效的解决高压输电铁塔检修工作存在的问题,应该大力发展并应用自动化技术 攀爬巡检机器人㊂具体而言,攀爬巡检机器人就是以矩形框架结构的形式设计其手爪,而这样的设计并能够加大机器人与铁塔之间受力面积,进而降低脱落的可能性,保障工作的质量与效率㊂在应用的过程中,攀爬巡检机器人能够铁塔上自主的攀爬,当机器人攀爬至输电塔主材的输电塔上时,攀爬巡检机器人在牵引模块的牵引下实现连接㊂基于这一前提,攀爬巡检机器人能够在运行的过程中开监测㊁维护的工作,甚至能够将监测的设备安装在制定位置,实现了实时监测输电铁塔状态的目的,以便能够及时排除输电中存在的安全隐患,提高输电的稳定性㊂二㊁高压输电铁塔攀爬巡检机器人的技术本文中的高压输电铁塔攀爬巡检机器人,主要包括伸缩模块㊁第一夹持模块与第二夹持模块,无论哪一个夹持模块中,其两侧均设置了牵引模块,该牵引模块能够驱动伸缩模块运动,进而带动第一夹持模块㊁第二个夹持模块移动,实现攀爬㊂实际上,夹持模块主要包括手爪㊁短杆(带滚子)㊁导向筒㊁滑筒㊁夹持驱动连杆㊁夹持驱动螺母㊁夹持驱动丝杠套筒㊁夹持驱动丝杠㊁夹持驱动联轴器㊁夹持驱动电机以及箱体等部分[1]㊂在设计攀爬巡检机器人的过程中,具体的方案为:(1)夹持驱动电机位于箱体内部的中轴线位置;(2)夹持驱动丝杠套筒则垂直的贯穿于箱体的中心;(3)导向筒与箱体连接之前应该横穿于箱体的侧面;(4)夹持驱动电机基于平键,使自身的输出轴与夹持驱动联轴器相互连接,而联轴器的另外一侧则与驱动丝杠相连;(5)夹持驱动丝杠㊁夹持驱动螺母相互组合形成螺旋副,另外夹持驱动连杆的与螺母铰接,同时在驱动丝杠套筒中夹持驱动螺母能够自由移动;(6)夹持驱动的另外一侧应该与滑筒铰接;(7)夹持驱动丝杠的轴线与滑筒轴线相互垂直,同时滑筒的一侧与导向筒相连,而其另一侧被安装了V 型的矩形挡片;(8)机器人的手爪是由两个 日 字的矩形框架构成的,而框架的一端与箱体的两侧发生铰接,而其另一端则属于自由端,在框架的自由端上,设置了向内弯曲的L 型抓钩,而其中部的内侧则设置了滑槽;(9)短杆中的滚子分别在手爪㊁手爪滑槽中,形成了具体的高副㊂三㊁高压输电铁塔攀爬巡检机器人的优化为了能够进一步发挥攀爬巡检机器人的功能,需要结合实际对其设计进行优化,具体的方案如下:(1)将机器人手爪的矩形结构设计为中间浅V 型的结构,当两侧的爪钩在闭合状态时,矩形结构的自由端能够相互平行;(2)在上述的设计方案中,滑筒的一端设置了矩形挡片,而在优化的过程中应该使矩形的外侧面㊁滑筒(下转第127页)221水利电力科技风2018年3月发生安全事故的时候能够第一时间找到责任人解决问题㊂除此之外,管理者必须要提升安全管理工作的参与程度,建立起长效机制㊂第三,提升变电操作人员的水平,降低操作故障发生的几率㊂要在管理过程中采取有效的对策提升操作人员的水平,降低操作故障㊂变电运行人员需要认真的学习变电运行管理制度,熟练掌握各种电气事故的处理方法,以缩短故障处理时间㊂在这一过程中还需要加大变电站安全运行监督力度,在工作当中要对故障点进行反复的检查,减少变电设备故障的发生,保证整个电力系统的安全稳定运行㊂第四,利用现代管理手段提升安全管理质量㊂随着技术的发展,变电站安全管理工作也要进行创新,积极引进现代技术手段,有效保障变电站运行的安全性和可靠性㊂如利用在线监测技术等高科技手段,能够对变电设备内部的温度㊁接触的完整性等进行监督和管理,及时发现变电设备运行中的不正常状态,采取恰当的方式解决问题㊂在技术的推动之下电网智能化水平提升,在线监测技术的作用也更为凸显,应用范围更为广泛㊂一些具有人工智能的辅助决策系统也能够对不正常的信息进行科学的分析和整合,为人工决策提供科学的依据,这样也有效提升了变电站的安全运行水平㊂三㊁结语在变电站运行过程中及时发现潜在的安全隐患,并采取有效的对策解决问题,能够推动其健康有效的运行,进而确保电力系统的正常运行㊂本文就结合工作实际,对变电站运行中存在的安全问题进行分析,并指出防护措施,希望通过本文的论述,能够对今后的变电站运行管理工作提供借鉴,以确保其安全运行㊂参考文献:[1]陈雨华.浅谈变电站运行故障及防范措施[J].科技创新与应用,2015(7):115.[2]海永城.浅析变电站安全运行存在的问题和保护技术[J].广东科技,2012,21(19):26-27.[3]王娅丽.浅析变电站运行安全措施与管理[J].企业技术开发旬刊,2012(6):128-129.[4]银文莉.浅谈变电站运行管理中的危险点及预防控制[J].科技风,2011(4):64-65.[5]宋宝成.浅析变电站运行安全措施与管理[J].工程技术:文摘版,2016,07(06):00150.﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏(上接第122页)轴线㊁丝杠轴线形成45度的夹角; (3)机器人的伸缩模块包括伸缩套筒㊁伸缩内套筒㊁滑块支座㊁滑块㊁剪叉机构㊁伸缩驱动丝杠支座㊁伸缩驱动螺母㊁伸缩驱动丝杠㊁伸缩驱动联轴器㊁伸缩驱动电机㊂其中,剪叉机构是基于销钉铰接由若干个连杆构成的;箱体上应该安装伸缩内套筒㊁伸缩外套筒㊁滑块支座㊁丝杠支座以及驱动电机等,从而实现驱动的目的;在滑动支座中安装滑块,在驱动状态下做直线运动,剪叉机构一段与螺母铰接,一端与滑块铰接,从而提高各部件之间的默契度;(4)牵引模块主要包括卷筒㊁卷筒轴㊁牵引驱动联轴器㊁牵引驱动电机,牵引驱动电机固定在支架上,而支架固定在箱体的侧面,电机的输出与联轴器相连,卷轴的轴承固定在支架上,实现各个部件的固定连接;(5)当伸缩模位于第二加持模块中时,牵引模块则应该安装在第一加持模块上,反之则相互调换位置;(6)如果在巡检的过程中,需要同时监测四个塔片,则应该使用四个攀爬巡检机器人分别开始工作,并在每个塔片中安装两条牵引绳,同时加入检测㊁维护的基本装置,随着机器人的移送,牵引绳便能够对铁塔开展全方位为检测工作[2]㊂基于上述设计,丰富了攀爬巡检机器人的功能,各个部件相互协调,发挥作用,进而实现了机器人的功能㊂例如:将攀爬巡检机器人应用在高压输电铁塔的检修中,手爪㊁导向筒发挥其功能,使其在角钢上自由行使,并将相关的数据传输给地面的工作人员,为其制定工作计划提供参考依据㊂四㊁结语综上所述,将攀爬巡检机器人应用在高压输电铁塔的监测㊁维护等工作中,能够提高检修工作定的效率,降低工作人员的工作强度㊂以此为基础,攀爬巡检机器人在运行的过程中,实现了同时监测四个塔片的目标,提高了监测㊁维护工作的效率,保证了角钢的可靠性㊂所以,为了能够提高输电的安全性㊁稳定性,可以大力推广攀爬巡检机器人,为电网的发展提供保障㊂参考文献:[1]熊鹏文.核电站巡检与应急处理机器人的关键技术研究[D].东南大学,2015.[2]叶林佶.超高压输电线路巡检机器人控制系统的研究与实现[D].重庆大学,2015.项目:本文系南京工程学院2016年度 挑战杯 支撑项目研究成果,(项目名称:高压输电铁塔攀爬巡检机器人,编号: TZ20160034)作者简介:李华强(1997-),男,汉族,江苏连云港人,研究方向:机械电子工程㊂721㊀科技风2018年3月水利电力。