一种新型的攀爬蛇形机器人
一种新型的攀爬蛇形机器人
t ou he ne c i b ng s nk ob a pl rf e ia lt nd fe biiy on P— m od l . hr gh t w lm i a e r ots m e ve iy r alz biiy a l xi lt R uc e
一
种新 型 的攀 爬 蛇 形机 器 人
A w p i b ng S a e Ro o Ne Ty e Clm i n k b t
孙 洪 刘立 祥 马培荪 ( .上海交 通 大学 机器 人研 究 所 , 海 2 0 3 ; 1 上 0 0 O 2 .中国科学 院软件 所 , 京 1 0 8 ) 北 0 0 0
验证 了 P R模 块 的 可 实现 和 灵 活性 。 —
[ btatI hsp p r a ay i a dcmp r oo eaigs a et r u ht etpcl x mpep ro me n A src]nt i a e , n ls n o aet p rt p c h o g h y i a l e fr do s n ae
中图 分 类号 : 2 2 TP 4
பைடு நூலகம்
文 献标 识 码 : A
0 引 言
蛇形 机 器 人 是 仿 生 机 器 人 研 究 中很 活 跃 的 一 支 , 17 从 9 2年 日本 东 京 大 学 的 Hi s r e教 授 研 制 出 o 第 一 台样 机 至 今 , 继 有 数 十 台蛇 形 机 器 人 样 机 问 相 世 。这 些 样 机 能 实 现 在平 面上 蜿 蜒 爬 行 、 滑 、 侧 翻滚
jo tc n e t n n o n ci .W hc r s n e R ( ic — o1 i o ih p e e td aP— pt h r l)mo u ewih u ie s lf n t n Ths mo ue smp e d l t nv r a u ci . o i d l i l
一种新型的攀爬蛇形机器人

第20 卷 第1期 苏州市职业大学学报 V ol.20,No.1 2009年3月 Journal of Suzhou V ocational University Mar. , 2009一种新型的攀爬蛇形机器人孙 洪(苏州市职业大学 电子信息工程系,江苏 苏州 215104)摘 要:针对蛇形机器人最常采用的三种关节连接方式:平行连接、正交连接和万向节连接,通过典型实例进行了工作空间的分析和比较,提出了一种具有万向节功能的P -R(pitch -roll)模块.该模块结构简单、便于控制,所组成的蛇形机器人理论上可以实现各种三维攀爬动作.最后通过研制的新型攀爬蛇形机器人样机,验证了P -R模块的可实现和灵活性.关键词:蛇形机器人;平行连接;正交连接;万向节连接;P -R模块;工作空间中图分类号:TP242 文献标志码:A 文章编号:1008-5475(2009)01-0027-05A New Style Climbing Snakelike RobotSUN Hong(Department of Electronic Information Engineering, Suzhou Vocational University, Suzhou 215104, China)Abstract: Three most dominant joints' links, namely parallel link, orthogonal link and universal jointlink, of snakelike robot were presented by typical models. Based on examples, their operating spaceswere analyzed and compared. Then a new functional module for joints' combination, named Pitch -Roll, was presented. This module has the function of universal joint, but is simpler to implementand easier to control. A snakelike robot based on this link module can theoretically perform all typesof maneuvers in 3D spaces. Finally, the prototype of a new type snakelike robot based on the P -Rmodule was produced, which further verified the agility of P -R module.Key words: snakelike robot; parallel link; orthogonal link; universal joint link; P -R module;operating space收稿日期:2008-11-26;修回日期:2009-01-16作者简介:孙 洪(1972-),女,山东济南人,讲师,博士,主要从事工业机器人和仿生机器人研究.蛇形机器人是仿生机器人研究中很活跃的一支,从1972年日本东京大学的Hirose 教授研制出第一台样机至今,相继有数十台蛇形机器人样机问世.这些样机能实现在平面上蜿蜒爬行、侧滑、翻滚等二维运动,在爬行中抬头或爬台阶、翻越较低障碍等三维运动,而对于更为复杂的如爬树等三维运动则甚为少见.本文将通过典型实例对几种样机的连接方式进行分析比较,提出一种新的连接方式,并基于该连接方式研制蛇形机器人样机,以期能够开发出结构简单、便于控制、具有多种运动模式的、能爬树的攀爬型蛇形机器人,它可实现空中侦察、管外壁检测、电杆高空线路维修等功能,其应用前景十分广阔.1 常见蛇形机器人关节连接方式蛇形机器人是一种无固定基座、多关节、多自由度的链式柔性机器人,它由多个相同或相似的单元模块连接组成,其运动模式和工作空间决定于各单元模块间的连接方式.综合考察各种样机,蛇形机器!!!!!!!!!!!!!!!DŽc* !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!DŽd*ZYXZYXZYXZYXP RHEF I4 结 论本文采用P-R 模块所研制成功的一种新型的具有攀爬功能的蛇形机器人,能实现灵活的三维运动.当前大部分采用平行连接或正交连接的蛇形机器人甚至一端固定的柔性机器人或机械臂,均可通过简单的改造,变成P-R 模块连接方式,从而大大提升其灵活性和工作空间.参考文献:[1] ENDO G, TOGAWA K, HIROSE S. Study on self -contained and terrain adaptive active cord mechanism[J]. IEEEInternational Conference on Intelligent Robots and Systems, 1999, 3: 1399-1405.[2] 周旭升,潘献飞,谭红力,等. 一种蛇形机器人的研制[J].机器人,2002,24(7):684-687.[3] 黄 恒,颜国正,丁国清,等. 一类蛇形机器人系统的运动学分析[J].高技术通讯,2002,6(3):90-94.[4] MAKOTO M, SHIGEO H. Three -dimensional serpentine motion and lateral rolling by active cord mechanism ACM -R3 [J].Proceedings of the 2002 IEEE/RSJ Intl, 2002, 1: 829-834.[5] BERNHARD K, KARL L P. GMD -Snake2: a snake -like robot driven by wheels and a method for motion control [J].Proc. of the Internet Content Rating Association, 1999: 3014-3019.[6] AOKI T, OHNO H, HIROSE S. Study on pneumatic mobile robot: design of SSR -II using bridle bellows mechanism [J].Proceedings of the 41st SICE Annual Conference , 2002, 3(5/7): 1492-1496.[7] NILSSON M. Why snake robots need torsion -free joints and how to design them [J]. Proceedings of the 1998 IEEEInternational Conference on Robotics and Automation, 1998, 1: 412-417.(责任编辑:尚 丽))b* !!!!!!!!!!!!!!!!!!!!!!!!!!!!!)c* !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!)d*偠㒧2009年第1期 孙 洪:一种新型的攀爬蛇形机器人。
蛇形机器人研究综述及在核电中的应用展望
蛇形机器人研究综述及在核电中的应用展望随着科技的飞速发展,机器人已经从最初的简单机械手臂逐渐演变成了具有高度智能化和灵活性的现代工具。
其中,蛇形机器人以其独特的运动方式和适应性引起了广泛关注。
它们像蜿蜒前行的灵蛇,穿梭于狭窄或复杂的环境之中,展现出惊人的机动性和灵活性。
在众多应用领域中,核电行业因其特殊性和对安全性的高要求而成为蛇形机器人展示其才华的舞台。
核电站内部结构复杂,管道密集,常规机器人往往难以进入某些特定区域进行检修或监测。
这时,蛇形机器人的优势便凸显出来:它们能够轻松地穿过狭窄的缝隙,绕过障碍物,到达人员难以直接操作的位置。
然而,蛇形机器人的研究并非一帆风顺。
它们的设计需要考虑到如何在保持灵活性的同时提高负载能力,如何在复杂的三维空间中精确控制运动轨迹,以及如何确保在极端环境下的稳定性和可靠性。
这些问题如同悬在研究者头顶的达摩克利斯之剑,时刻提醒着他们不断探索和完善。
目前,蛇形机器人在核电领域的应用主要集中在设备巡检、故障诊断和维护等方面。
它们装备有高清摄像头和各种传感器,能够捕捉到微小的异常信号,及时发现潜在的安全隐患。
此外,一些蛇形机器人还具备简单的操作功能,可以在不中断核电站运行的情况下完成一些紧急维修任务。
展望未来,随着人工智能技术的进一步发展和材料科学的突破,我们有理由相信蛇形机器人将在核电行业中扮演更加重要的角色。
它们或许能够实现完全自主的操作,甚至与其他机器人或人类工作人员协同作业;它们的感知能力将更加敏锐,能够在第一时间内识别并响应各种复杂情况;它们的结构将更加坚固耐用,能够在高温、高压、强辐射等恶劣条件下长期稳定工作。
当然,这一切的实现都需要我们持续投入研究和创新。
我们需要更深入地理解蛇形机器人的运动机理和控制策略,开发更加高效和智能的算法来指导它们的行动;我们需要探索新型材料和制造工艺来提升它们的性能和降低成本;我们还需要加强跨学科的合作与交流,将不同领域的最新成果融合到蛇形机器人的设计和应用中去。
一种新型蛇形机器人的机构研究与设计
一种新型蛇形机器人的机构研究与设计摘要:蛇形机器人是一种新型的机器人,它的机构结构具有良好的灵活性和适应性,可以用于各种环境下的探测、搜救、拍摄等任务。
本文通过分析蛇形机器人的机构结构、运动原理以及控制方法,对其进行详细研究和设计,并进行了仿真验证和实验验证。
结果表明,所设计的蛇形机器人机构具有较高的运动精度和稳定性,可以在各种复杂环境下有效地完成任务。
关键词:蛇形机器人、机构结构、运动原理、控制方法、仿真验证、实验验证1.引言蛇形机器人是一种仿生机器人,它的外形和运动特点都来源于蛇类动物。
蛇形机器人的机构结构类似于蛇体,可以实现蛇般的爬行、盘踞、攀爬等运动,具有很强的适应性和灵活性,可以用于各种环境下的探测、搜救、拍摄等任务。
蛇形机器人的机构设计是实现其运动特点的基础,因此本文分别从机构结构、运动原理、控制方法等方面进行研究和设计。
2.蛇形机器人的机构结构蛇形机器人的机构结构是其实现运动的基础,一般由三部分组成:蛇头、蛇身和蛇尾。
其中蛇头负责控制运动方向,蛇身由多个连续的节段组成,每个节段可以自由弯曲,蛇尾负责平衡和保持身体稳定。
蛇形机器人的机构结构主要涉及两个方面,一个是机构设计,另一个是材料选择。
机构设计包括蛇体的长度、直径、关节间距、关节的自由度、驱动方式等;材料选择主要包括各种材料的力学性能、刚度、强度、重量等特性。
在机构设计中,要注意蛇体的灵活性和韧性,以保证其在复杂环境中的适应性和稳定性;在材料选择中,则要根据实际应用的需要进行选择,比如在高温、腐蚀等极端环境中要选择具有耐高温、耐腐蚀性能的材料。
3.蛇形机器人的运动原理蛇形机器人运动的机理来源于蛇类动物的生物学特性,主要包括以下几个方面。
(1)鳞片滑跳:蛇类动物的身体表面被覆盖着很多光滑的鳞片,在运动时可以充当滑行的媒介。
这种滑行方式可以使蛇形机器人在各种环境下灵活运动,如在水中游动、在陡峭的斜面上攀爬等。
(2)节段结构:蛇类动物的身体由多个节段构成,每个节段可以自由弯曲,因此蛇形机器人可以实现蛇般的摆动和弯曲。
蛇形机器人的工作原理
蛇形机器人的工作原理
蛇形机器人是一种模仿蛇类运动的机器人,它的工作原理可以分为硬件和软件两个方面:
硬件方面:
1. 结构设计:蛇形机器人的身体由一系列连续的关节单元和连接杆组成,每个关节单元都有自己的驱动器和传感器,可以自由弯曲和转动。
2. 驱动系统:每个关节单元都有一个电机或压电驱动器,用于控制关节的运动。
这些驱动器可以根据软件控制发送恰当的指令以实现不同的运动方式。
3. 传感器系统:蛇形机器人通常具有各种传感器,如陀螺仪、加速度计、压力传感器等,用于感知自身的姿态、环境条件以及与外部物体的接触等信息。
4. 电源系统:蛇形机器人需要电源来供电驱动器和其他电子设备。
软件方面:
1. 运动规划:通过计算机算法,根据机器人当前位置和目标位置,确定每个关节单元的驱动器运动方式,以生成合适的运动序列和控制指令。
2. 执行控制:将计算出的控制指令发送给各个关节的驱动器,使得机器人按照预定的运动轨迹和姿态进行运动。
3. 感知与决策:机器人通过传感器系统获取环境信息,并利用算法对这些信息进行处理和分析,根据需要作出相应的决策,调整机器人的运动方式和姿态。
根据蛇形机器人的工作原理,在软硬件的协同作用下,它可以实现各种复杂的身
体姿态和运动方式,如爬行、攀爬、游泳等,以适应不同的环境和任务需求。
履带式类蛇形机器人在复杂环境中的设计及应用
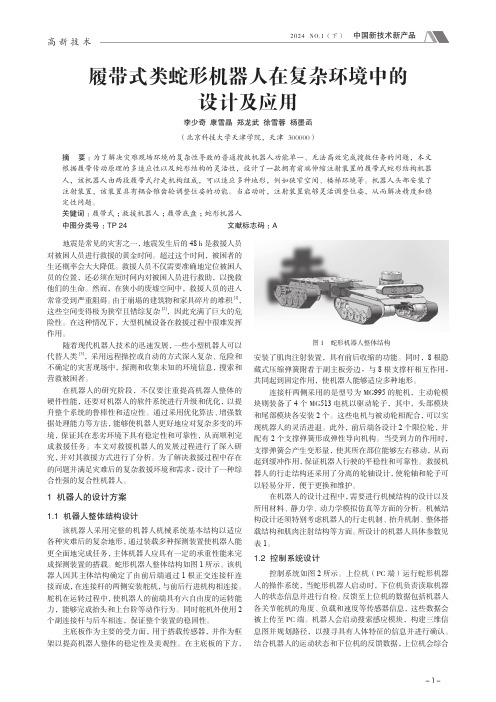
移动方式:轮式、履带式、腿式以及蛇形。这 4 种方式各有 优势:1)轮式移动方式通常被救援机器人所采用,因为它具 有结构简单和灵活性强的特点,所以适用于多种地形环境。 然而,它对软件算法和传感器的依赖程度较高,且在越障能 力、稳定性和能耗方面存在一定的限制。2)履带式移动方 式使机器人具备良好的越障能力,能够在各种复杂地形(如 废墟、楼梯、泥泞道路等)上展现出很强的适应能力。但它 的机械结构相对复杂,导致运动灵活性有所降低。3)腿式 移动方式使机器人具备克服复杂地形和障碍物的能力,在各 种救援场景(包括瓦砾、坑洞和楼梯)中都能够有效移动。 由于腿式移动具有复杂性,因此机器人需要更多的维护和技 术支持来保持其正常运行状态。4)蛇形移动方式则是一种 较为特殊的行进方式。采用蛇形移动的机器人通常以蠕动或 转动的方式行进。这种行进方式速度较慢且负载能力较低, 无法携带多种应急设备进行救援工作,因此其适用范围相对 较小。最新研制的履带式蛇形结构机器人将履带式和蛇形的 优势相结合,使其不仅适用于地震后城市废墟等区域的救援 工作,还能够攀爬楼梯以广泛、全面地探测周围环境并进行 有效救援,同时连接处采用舵机机构设计也为其带来了更稳 定的性能表现。这些特点都有利于机器人在复杂环境中进行 全面探测与救援。
1 机器人的设计方案
1.1 机器人整体结构设计
该机器人采用完整的机器人机械系统基本结构以适应 各种灾难后的复杂地形,通过装载多种探测装置使机器人能 更全面地完成任务,主体机器人应具有一定的承重性能来完 成探测装置的搭载。蛇形机器人整体结构如图 1 所示。该机 器人因其主体结构确定了由前后端通过 1 根正交连接杆连 接而成,在连接杆的两侧安装舵机,与前后行进机构相连接。 舵机在运转过程中,使机器人的前端具有六自由度的运转能 力,能够完成抬头和上台阶等动作行为。同时舵机外使用 2 个副连接杆与后车相连,保证整个装置的稳固性。
蛇形机器人使用说明书
蛇形使用说明书蛇形使用说明书一、产品概述蛇形是一款具有自主移动能力的,其设计灵感来源于蛇的爬行动作。
蛇形由多个相互连接的模块组成,能够模拟蛇的运动方式,在不同的地形和环境中自由移动。
二、产品特性1.灵活性:蛇形采用模块化设计,每个模块都可以自由弯曲和旋转,使得在复杂地形中的运动更加灵活。
2.自主导航:蛇形配备了先进的导航系统和传感器,能够自主寻找路径并避开障碍物。
3.多功能:蛇形支持多种操作模式,如巡航模式、搬运模式和搜索救援模式,适用于不同场景的需求。
4.轻便易携:蛇形采用轻量化材料制作,便于携带和部署。
三、组装与连接1.将各个模块按照顺序连接起来,确保连接牢固且不松动。
2.在连接处使用连接器固定模块,以确保连接的稳定性。
3.在连接模块时,请确认每个连接器的方向和位置正确,以免造成连接错误。
4.连接完成后,进行功能测试,确保能够正常工作。
四、使用方法1.开机和关机操作:按下背部的电源开关按钮,即可启动或关闭。
2.操作模式选择:支持多种模式选择,通过面板上的模式选择按钮进行切换。
3.移动控制:使用遥控器或者智能方式APP,控制的运动方向和速度。
4.使用注意事项:在使用蛇形的过程中,需要注意周围环境,避免碰撞或损坏。
五、常见问题解答Q: 无法启动怎么办?A: 请检查的电源是否连接正常,是否有足够的电量。
Q: 移动困难怎么办?A: 请检查的连接是否牢固,模块之间是否有松动。
Q: 无法避开障碍物怎么办?A: 请检查的传感器是否正常工作,是否有物体遮挡传感器。
六、维护与保养1.定期清洁的外表面和连接器,保持的正常运行。
2.在使用中发现故障或异常情况时,及时联系售后服务中心进行维修。
附件:本文档无附件。
法律名词及注释:1.模块化设计:将产品拆分成多个相互独立的模块,使每个模块具备独立的功能和特点。
一种蛇形攀爬仿生机器人[实用新型专利]
![一种蛇形攀爬仿生机器人[实用新型专利]](https://img.taocdn.com/s3/m/8f9675743d1ec5da50e2524de518964bcf84d2ef.png)
专利名称:一种蛇形攀爬仿生机器人
专利类型:实用新型专利
发明人:李一明,李明辉,于苏洋,李红双,刘永康,苏靖博,卢义山春,臧福堃
申请号:CN202220117402.X
申请日:20220117
公开号:CN216634376U
公开日:
20220531
专利内容由知识产权出版社提供
摘要:一种蛇形攀爬仿生机器人,包括头部、身躯及尾部,身躯由若干躯体单元节串联组成;头部与躯体单元节之间、相邻躯体单元节之间、躯体单元节与尾部均通过舵机相连;躯体单元节包括身躯骨架筒体、电机、齿轮、内齿圈及全向轮;身躯骨架筒体一端筒口固设有舵机转接支臂,另一端筒口固设有舵机安装支臂;舵机转接支臂用于连接相邻舵机的动力输出轴;电机固装在舵机转接支臂一侧的身躯骨架筒体内部,电机的电机轴与身躯骨架筒体的中轴线相平行;齿轮固装在电机轴上;舵机固装在舵机安装支臂上;全向轮通过轴承套装在身躯骨架筒体外侧;内齿圈套装在身躯骨架筒体外侧,内齿圈与全向轮轮盘同轴固连;身躯骨架筒体上设有豁口,齿轮通过豁口与内齿圈相啮合。
申请人:沈阳航空航天大学
地址:110136 辽宁省沈阳市道义经济开发区道义南大街37号
国籍:CN
代理机构:沈阳东大知识产权代理有限公司
代理人:李梁
更多信息请下载全文后查看。
一种新型的攀爬蛇形机器人
一种新型的攀爬蛇形机器人
孙洪;刘立祥;马培荪
【期刊名称】《传动技术》
【年(卷),期】2008(022)003
【摘要】本文针对蛇形机器人最常采用的三种关节连接方式:平行连接、正交连接和万向节连接,通过典型实例进行了工作空间的分析和比较.提出了一种具有万向节功能的P-R(pitch-roll)模块,该模块结构简单、便于控制,所组成的蛇形机器人可以实现各种三雏攀爬动作.最后通过所研制的新型攀爬蛇形机器人样机,验证了P-R模块的可实现和灵活性.
【总页数】5页(P34-37,48)
【作者】孙洪;刘立祥;马培荪
【作者单位】上海交通大学机器人研究所,上海,200030;中国科学院软件所,北京,100080;上海交通大学机器人研究所,上海,200030
【正文语种】中文
【中图分类】TP242
【相关文献】
1.一种新型的三轮全向移动攀爬机器人设计 [J], 王江华;赵燕
2.一种新型蛇形机器人的设计研究 [J], 朱圣领;郭旭红;芮延年;刘开强
3.一种新型的攀爬蛇形机器人 [J], 孙洪
4.用形状记忆合金驱动的一种新型蛇形机器人 [J], 赵丽娟;解晓松;刘杰;隋新;刘秀
莲
5.一种新型蛇形机器人的运动规划研究 [J], 朱圣领;郭旭红;芮延年;王翔
因版权原因,仅展示原文概要,查看原文内容请购买。
一种可重构蛇形机器人的研究
一种可重构蛇形机器人的研究可重构蛇形机器人(Reconfigurable Snake-like Robot)是一种模仿蛇类行走方式的机器人,具有高度灵活性和适应性的特点。
它通过改变机器人的形态、结构和运动方式,能够适应不同环境下的任务需求。
近年来,可重构蛇形机器人的研究受到了越来越多的关注,其在探索、搜救、救援等领域具有良好的应用前景。
可重构蛇形机器人的研究主要涉及机器人的形态设计、运动控制和环境感知等方面。
形态设计是其中的核心问题,主要研究如何设计机器人的结构和连接方式,使其能够以不同的形态在不同的环境中运动。
传统的蛇形机器人主要采用刚性连杆或柔性节段来模拟蛇类的运动方式,这种设计存在连杆切换过程中运动中断的问题,影响了机器人的灵活性和速度。
近年来,研究者提出了一种基于模块化设计的概念,即将机器人分为若干个相互连接的模块,模块之间通过特定的方式连接起来,可以自由组合和重构。
这种设计可以使机器人在不同的环境中快速、灵活地切换形态,更好地完成任务。
同时,利用软体材料可以提高机器人的柔韧性和适应性,增强其在复杂环境中的穿越能力。
运动控制是保证机器人能够按照预定路径和速度运动的关键技术。
由于柔性和可重构结构的特点,可重构蛇形机器人的运动控制比较复杂。
传统的控制方法主要是基于模型的控制,即建立机器人的运动模型,通过控制模型的参数来实现运动控制。
然而,由于机器人形态的可变性和环境的不确定性,模型建立较难,并且很难准确描述机器人的运动。
因此,研究者提出了一种基于机器学习的方法,即通过训练机器人在实际环境中的运动数据,利用神经网络等技术实现运动控制。
这种方法可以使机器人根据实际情况进行自主学习和调整,提高控制精度和鲁棒性。
环境感知是机器人实现智能化和自主导航的关键技术。
可重构蛇形机器人需要通过感知环境中的障碍物、地形、光线等信息,调整自身形态和运动方式,以适应不同的任务需求。
传统的环境感知方法主要是基于传感器的方法,即通过安装不同类型的传感器,如摄像头、红外传感器、力触传感器等,来获取环境信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第20 卷 第1期 苏州市职业大学学报 V ol.20,No.1 2009年3月 Journal of Suzhou V ocational University Mar. , 2009
一种新型的攀爬蛇形机器人
孙 洪
(苏州市职业大学 电子信息工程系,江苏 苏州 215104)
摘 要:针对蛇形机器人最常采用的三种关节连接方式:平行连接、
正交连接和万向节连接,通过典型实例进行了工作空间的分析和比较,提出了一种具有万向节功能的P -R(pitch -roll)模块.该模块
结构简单、便于控制,所组成的蛇形机器人理论上可以实现各种三维攀爬动作.最后通过研制的新
型攀爬蛇形机器人样机,验证了P -R模块的可实现和灵活性.
关键词:蛇形机器人;平行连接;正交连接;万向节连接;P -R模块;工作空间
中图分类号:TP242 文献标志码:A 文章编号:1008-5475(2009)01-0027-05
A New Style Climbing Snakelike Robot
SUN Hong
(Department of Electronic Information Engineering, Suzhou Vocational University, Suzhou 215104, China)
Abstract: Three most dominant joints' links, namely parallel link, orthogonal link and universal joint
link, of snakelike robot were presented by typical models. Based on examples, their operating spaces
were analyzed and compared. Then a new functional module for joints' combination, named Pitch -
Roll, was presented. This module has the function of universal joint, but is simpler to implement
and easier to control. A snakelike robot based on this link module can theoretically perform all types
of maneuvers in 3D spaces. Finally, the prototype of a new type snakelike robot based on the P -R
module was produced, which further verified the agility of P -R module.
Key words: snakelike robot; parallel link; orthogonal link; universal joint link; P -R module;
operating space
收稿日期:2008-11-26;修回日期:2009-01-16
作者简介:孙 洪(1972-),女,山东济南人,讲师,博士,主要从事工业机器人和仿生机器人研究.
蛇形机器人是仿生机器人研究中很活跃的一支,从1972年日本东京大学的Hirose 教授研制出第一台样机至今,相继有数十台蛇形机器人样机问世.这些样机能实现在平面上蜿蜒爬行、侧滑、翻滚等二维运动,在爬行中抬头或爬台阶、翻越较低障碍等三维运动,而对于更为复杂的如爬树等三维运动则甚为少见.本文将通过典型实例对几种样机的连接方式进行分析比较,提出一种新的连接方式,并基于该连接方式研制蛇形机器人样机,以期能够开发出结构简单、便于控制、具有多种运动模式的、能爬树的攀爬型蛇形机器人,它可实现空中侦察、管外壁检测、电杆高空线路维修等功能,其应用前景十分广阔.1 常见蛇形机器人关节连接方式
蛇形机器人是一种无固定基座、多关节、多自由度的链式柔性机器人,它由多个相同或相似的单元模块连接组成,其运动模式和工作空间决定于各单元模块间的连接方式.综合考察各种样机,蛇形机器
!!!!!
!!!!!!!!!!DŽc* !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!DŽd*
Z
Y
X
Z
Y
X
Z
Y
X
Z
Y
X
P R
H
E
F I
4 结 论
本文采用P-R 模块所研制成功的一种新型的具有攀爬功能的蛇形机器人,能实现灵活的三维运动.当前大部分采用平行连接或正交连接的蛇形机器人甚至一端固定的柔性机器人或机械臂,均可通过简单的改造,变成P-R 模块连接方式,从而大大提升其灵活性和工作空间.
参考文献:
[1] ENDO G, TOGAWA K, HIROSE S. Study on self -contained and terrain adaptive active cord mechanism[J]. IEEE
International Conference on Intelligent Robots and Systems, 1999, 3: 1399-1405.
[2] 周旭升,潘献飞,谭红力,等. 一种蛇形机器人的研制[J].机器人,2002,24(7):684-687.
[3] 黄 恒,颜国正,丁国清,等. 一类蛇形机器人系统的运动学分析[J].高技术通讯,2002,6(3):90-94.
[4] MAKOTO M, SHIGEO H. Three -dimensional serpentine motion and lateral rolling by active cord mechanism ACM -R3 [J].
Proceedings of the 2002 IEEE/RSJ Intl, 2002, 1: 829-834.
[5] BERNHARD K, KARL L P. GMD -Snake2: a snake -like robot driven by wheels and a method for motion control [J].
Proc. of the Internet Content Rating Association, 1999: 3014-3019.
[6] AOKI T, OHNO H, HIROSE S. Study on pneumatic mobile robot: design of SSR -II using bridle bellows mechanism [J].
Proceedings of the 41st SICE Annual Conference , 2002, 3(5/7): 1492-1496.
[7] NILSSON M. Why snake robots need torsion -free joints and how to design them [J]. Proceedings of the 1998 IEEE
International Conference on Robotics and Automation, 1998, 1: 412-417.
(责任编辑:尚 丽)
)b* !!!!!!!!!!!!!!!!!!!!!!!!!!!!!)c* !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!)d*
偠㒧
2009年第1期 孙 洪:一种新型的攀爬蛇形机器人。