SAR成像算法docx
SAR数字成像算法

SAR Digital Imaging Algorithms 主要汇报内容:一、SAR 的工作原理二、主要成像算法简介汇报人:张彦飞(博士生)导师:关键(教授)2005年5月14日一、SAR 的工作原理1 感性认识正侧视条带(stripmap) SAR 的空间几何关系(正视图)正侧视条带SAR 的空间几何关系(后视图)SAR 的天线位置与点目标的几何关系SAR的天线为什么要侧视工作?技术上可以提高距离向在地面上的分辨率;战术上可以在远距离上实施对战场的侦察。
SAR天线侧视的作用从不同角度对SAR的工作原理的理解(1)从阵列天线上看实孔径ULA阵列天线一个小孔径的天线在直线上移动形成的合成阵列天线可以等效于上面的实孔径ULA 阵列天线 但是两者还有以下的重要区别: SAR 与实孔径阵列雷达的区别:实孔径雷达 目标在远区场(夫琅和费区); R p >2D 2/λ 平面波 单程相移 SAR 目标在近区场(菲涅尔区); R p <2L 2S /λ 球面波 双程相移0/,s D L R θλθ==, 例如:X 波段,波长 3cm ,D=2m ,R 0=20公里,得到:合成孔径长度L S=300米,2D 2/λ=267米,2L 2S /λ=6000公里。
见下图实孔径阵列天线 合成阵天线 (2) 从匹配滤波上看频域上:匹配滤波器-------相位校正网络--------移相(延时)和相加SAR 的聚焦过程与匹配虑波作用的类比匹配虑波作用:对信号进行 :相位校正(同相)和同相相加(3) 从相关接收看 :时域处理,与频域上的匹配滤波等价。
匹配滤波器的输出就是输入信号的自相关函数。
(4) 从脉冲压缩上看:对线调频信号,‘压缩’滤波器就是‘匹配’滤波器。
(5) 从多普勒效应上看。
对时间(距离)的分辨可以转化为对频率的分辨(因为:SAR 回波的平方相位的线性调频特性使时间(距离)和频率二者有线性关系。
)SAR 的近似简化物理模型:雷达在一个位置发射并在同一位置接收,然后跳到下个位置发射和接收。
SAR成像程序

a=(Sr3(j,:));
c=xcorr(a,b);
maxv=max(c);
index_max=find(c==maxv);
diff=index_max-8*N+diff;
temp2=zeros(1,8*N);
%index_max=zeros(1,8*N);
for i=1:127 %包络对齐
diff=0;
b=(Sr3(i+1,:));
if(i<6)
for j=1:i
a=(Sr3(j,:));
end
diff=floor(diff/5);
end
temp1(diff+1:8*N)=Sr3(i+1,1:8*N-diff);
temp2(diff+1:8*N)=Sr4(i+1,1:8*N-diff);
if(diff~=0)
%for i=1:128
% Sr1(i,:)=fft(Srnm(i,:)).*conj(fft(Srf));
%end
%for i=1:128
% Sr(i,:)=ifft(Sr1(i,:));
%end
%对距离压缩后的信号进行包络对齐
Sr2=zeros(M,N);
y0=25000;
r0=(x0^2+y0^2)^0.5;%目标与雷达的距离
v=50;%目标速度
pr=1.2*Br;
sampr=1/pr;
sn=0:sampr:Tr;
time_acct=r0*theta/v;%成像时间对应的目标运动时间
Ba=1/time_acct;%方位向的多普勒展宽
雷达成像技术(保铮word版)第五章 合成孔径雷达成像算法
第五章 合成孔径雷达成像算法SAR 成像处理最初用光学处理,后来采用数字处理。
与光学处理相比,数字处理更精确、更灵活,在距离徙动校正、运动补偿、几何校正和坐标转换等方面有明显的优势。
SAR 成像处理主要有两个问题,一是距离徙动校正,二是运动补偿。
距离徙动可分解一次的线性分量和二次以上(包括二次)的弯曲分量,线性分量称为距离走动,弯曲分量称为距离弯曲。
这一章主要讨论针对不同距离徙动程度情况下,需要采用的不同成像算法,运动补偿将在下一章讨论。
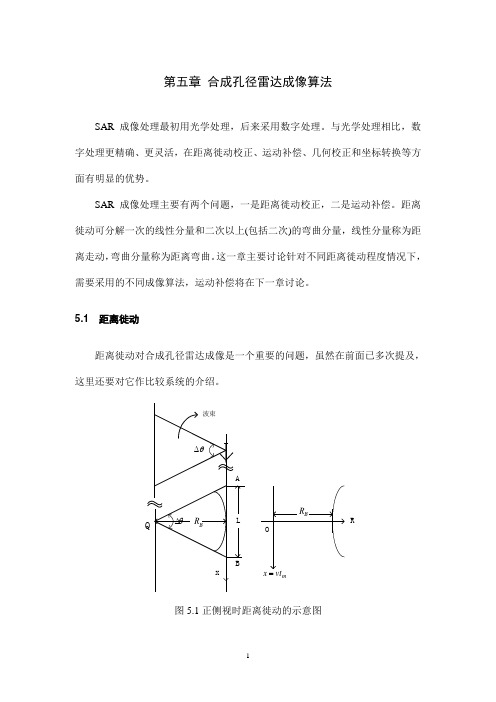
5.1 距离徙动距离徙动对合成孔径雷达成像是一个重要的问题,虽然在前面已多次提及,这里还要对它作比较系统的介绍。
θ∆波束Qθ∆BR B ALxBR ROmvt x图5.1正侧视时距离徙动的示意图距离徙动的情况对不同的波束指向会有所不同,首先讨论正侧视的情况,这时距离徙动可用图5.1来说明。
所谓距离徙动是雷达直线飞行对某一点目标(如图中的Q 点)观测时的距离变化。
如图5.1所示,天线的波束宽度为θ∆,当载机飞到A 点时波束前沿触及Q 点,而当载机飞到B 点时,波束后沿离开Q 点,A 到B 的长度即有效合成孔径L ,Q 点对A 、B 的转角即相干积累角,它等于波束宽度θ∆。
Q 点到航线的垂直距离为最近距离B R 。
这种情况下的距离徙动通常以合成孔径边缘的斜距R 与最近距离B R 之差表示,即BB B q R R R R R -∆=-=2secθ (5.1)在合成孔径雷达里,波束宽度θ∆一般较小,2)(2112secθθ∆+≈∆,而相干积累角θ∆与横向距离分辨率a ρ有以下关系:θλρ∆=2a 。
利用这些关系,(5.1)式可近似写成:22232)(81aBB q R R R ρλθ=∆≈(5.2)假设条带场景的幅宽为W ,即场景近、远边缘与航线的最近距离分别为2W R B -和2W R B +,得场景两端的距离徙动差为2232a q WR ρλ=∆ (5.3)距离徙动和距离徙动差的影响表现在它们与距离分辨率r ρ的相对值,如果它们比r ρ小得多,就无需作包络移动补偿。
sar成像算法核心是傅里叶变换
sar成像算法核心是傅里叶变换【原创版】目录1.SAR 成像算法的核心2.傅里叶变换的概念和作用3.傅里叶变换在 SAR 成像算法中的应用4.傅里叶变换的优势和局限性5.未来发展趋势正文一、SAR 成像算法的核心SAR(Synthetic Aperture Radar)成像算法是一种利用合成孔径雷达技术进行成像的方法。
其核心是傅里叶变换,通过将原始数据进行傅里叶变换,提取出目标物体的频谱信息,再经过逆傅里叶变换,将频谱信息转换回图像域,从而实现对目标物体的成像。
二、傅里叶变换的概念和作用傅里叶变换是一种在信号处理、图像处理等领域具有重要应用的数学方法。
其基本思想是将一个信号(或图像)分解为一系列不同频率的正弦波(或余弦波)的叠加。
傅里叶变换可以将非周期信号转换为周期信号,也可以将周期信号转换为非周期信号。
在 SAR 成像算法中,傅里叶变换的作用是将原始数据转换为频谱数据,从而提取出目标物体的频率信息。
三、傅里叶变换在 SAR 成像算法中的应用在 SAR 成像算法中,傅里叶变换被用于提取目标物体的频谱信息。
通过对原始数据进行傅里叶变换,可以得到目标物体的频谱图,从而提取出目标物体的频率信息。
再通过逆傅里叶变换,将频谱信息转换回图像域,从而实现对目标物体的成像。
四、傅里叶变换的优势和局限性傅里叶变换在 SAR 成像算法中的优势在于,它可以将非周期信号转换为周期信号,从而方便地进行频谱分析。
同时,傅里叶变换可以提取出目标物体的频率信息,从而实现对目标物体的成像。
然而,傅里叶变换也存在一些局限性。
首先,傅里叶变换只能处理有限长度的信号,对于无限长度的信号,需要进行截断处理。
其次,傅里叶变换对噪声敏感,噪声的存在可能会影响频谱分析的结果。
五、未来发展趋势随着 SAR 技术的不断发展,对成像算法的要求也越来越高。
未来,SAR 成像算法将朝着更高的分辨率、更准确的成像结果和更强的抗干扰能力方向发展。
SAR雷达成像算法的研究

SAR雷达成像算法的研究摘要合成孔径雷达(SAR)是一种置于运动平台(如飞机和卫星等)的成像雷达,具有全天时、全天候、远距离成像的特点,因此可以大大提高雷达的信息获取能力,近年来在军事和民用方面都得到了广泛的发展和应用。
机载合成孔径雷达成像仿真技术在机载SAR 的研究与发展中具有重要作用。
本文首先介绍了二维SAR成像的基本原理,分析了二维SAR距离和方位向上的分辨率以及距离徙动特性,从脉压理论和合成孔径原理出发,分析了SAR高分辨率成像的距离高分辨率和方位高分辨率理论,说明距离分辨率取决于信号带宽,方位分辨率则取决于载机与固定目标相对运动时产生的具有线性调频性质的多普勒信号带宽决定,并通过脉压技术实现方位高分辨成像。
然后介绍了两种成熟的合成孔径雷达成像算法:距离-多普勒算法、线频调变标算法,并在Matlab环境里进行仿真实现。
最后应用距离-多普勒算法完成了机载正侧视合成孔径雷达对地面固定目标模型的成像仿真实验,得到了比较理想的仿真图像。
关键词:合成孔径雷达,距离-多普勒算法,线频调变标算法Research of Imaging Algorithm for SARAbstractSynthetic aperture radar(SAR)is placed in moving platform such as airplane and satellite, and can obtain image reflecting dispersion characteristic of the objects.Because SAR is free of weather influence, and works in both day and night, and it can g reatly improve radar’s capability of gaining information, it is widely applicated and well developed in both civilian and military fields in recent years. Imaging simulation technology plays an important role in the research and development of airborne SAR.This thesis discusses the fundamental theory of planar SAR, analyzes planar SAR resolving ability in range and azimuth dimensions and the characteristic of Range Cell Migration(RCM). According to pulse compression theory and SAR principle, the paper firstly gives an analysis on the principle of high-resolution SAR imaging, then, notes that the SAR range resolution is dependent of signal bandwidth, while SAR azimuth resolution is dependent of the bandwidth of the LFM-featured Doppler signal generated from the relative movement between aircraft carrying the radar and the fixed ground target, thus, high azimuth resolution can be realized through pulse compression. This thesis also introduces two kinds of mature SAR imaging method, Range-Doppler algorithm and Chirp-Scaling algorithm, which have been simulated and realized under Matlab environment. Finally, the imaging simulation test of airborne sideway SAR to the fixed target on the ground is carried out by using the Range-Doppler algorithm, accordingly the ideal simulating images have been obtained.KEY WORDS:Synthetic Aperture Radar, Range-Doppler algorithm, Chirp-Scaling algorithm目录摘要 (I)Abstract (II)1 绪论 (1)1. 1 研究背景和意义 (1)1. 2 SAR研究概况 (1)合成孔径雷达分类 (2)合成孔径雷达应用 (3)本文研究内容 (3)2 SAR成像与高分辨率基本原理 (4)引言 (4)2.2 二维SAR成像基本原理 (4)2.2.1 二维SAR原始数据的录取 (4)2.2.2 距离徙动 (6)2.3 线性调频信号和脉冲压缩原理 (9)2.3.1 线性调频信号 (9)脉冲压缩原理 (10)2.4 雷达分辨率 (12)实孔径侧视雷达成像及成像空间分辨率 (12)实孔径侧视雷达成像 (12)2.4.1.2 实孔径侧视雷达空间分辨率 (13)2.4.2 SAR 空间分辨率 (14)2.4.2.1 距离向分辨率 (14)2.4.2.2 方位向分辨率 (16)2.5 本章小结 (19)3 SAR 仿真成像 (20)3.1 引言 (20)3.2 合成孔径雷达成像算法 (20)3.2.1 距离—多普勒成像算法 (20)3.2.2 线频调变标(Chirp—Scaling)成像算法 (26)3.3 本章小结 (29)4总结与展望 (30)致谢 (31)参考文献 (32)附录 (34)1 绪论1. 1 研究背景和意义雷达成像是现代探测科学领域的一项突破性成就。
sar 常用成像算法
sar 常用成像算法SAR(Synthetic Aperture Radar)是合成孔径雷达的缩写,是一种利用雷达技术进行成像的方法。
常用成像算法是指在SAR成像过程中常用的数据处理方法,用于从原始雷达数据中提取目标信息并生成可视化图像。
本文将介绍几种常用的SAR成像算法。
一、Range-Doppler算法Range-Doppler算法是最基础、最常用的SAR成像算法之一。
它通过两个主要步骤来实现成像:距离向(Range)压缩和多普勒向(Doppler)压缩。
首先,进行距离向压缩,将接收到的信号与发射的信号进行相关运算,得到目标在距离上的分布信息。
然后,进行多普勒向压缩,根据目标的运动情况对信号进行频率调整,得到目标在速度上的分布信息。
最后,将两个方向上的信息进行合成,得到最终的成像结果。
二、Chirp Scaling算法Chirp Scaling算法是一种用于高分辨率SAR成像的算法。
它通过对原始SAR数据进行频率调整,实现对目标的高精度成像。
具体而言,该算法通过对接收到的信号进行线性调频,使得距离上的分布信息与目标的距离成线性关系。
然后,对调频后的信号进行快速傅里叶变换,得到目标在频谱上的分布信息。
最后,对频谱信息进行逆变换,得到目标在距离上的高分辨率成像结果。
三、Omega-K算法Omega-K算法是一种用于高分辨率SAR成像的频域算法。
它通过对SAR数据进行快速傅里叶变换,将时域数据转换为频域数据,然后根据目标的运动情况对频域数据进行调整,实现高分辨率成像。
具体而言,该算法通过对频域数据进行插值,使得目标的速度信息与频率成线性关系。
然后,对插值后的数据进行逆傅里叶变换,得到目标在距离上的高分辨率成像结果。
四、Polar Format算法Polar Format算法是一种用于SAR成像的快速算法。
它通过将SAR数据从直角坐标系转换为极坐标系,实现对目标的快速成像。
具体而言,该算法首先将原始SAR数据进行极坐标变换,得到距离和方位两个维度上的数据。
一种分段处理的大斜视sar成像算法
一种分段处理的大斜视sar成像算法大斜视SAR(Synthetic Aperture Radar)成像是一种利用航天器在飞行过程中合成广角视场的合成孔径雷达成像技术。
它能够获取大范围、高分辨率的遥感图像,适用于探测大尺度地物、提高目标可分辨率等许多应用。
然而,由于大斜视SAR成像过程中存在地形扭曲、多普勒频移、多次反射等问题,传统的SAR成像算法在此场景下有一定的局限性。
因此,为了实现高质量的大斜视SAR成像,分段处理的算法被提出。
分段处理的大斜视SAR成像算法主要分为以下几个步骤:1.大斜向成像几何校正:由于航天器的运动轨迹是非线性的,需要对成像过程进行几何校正,将非线性运动过程转换为线性运动过程。
此步骤常采用插值和卷积方法。
2.地形扭曲校正:由于斜视角度较大,地形对雷达波的传播会引起地形扭曲。
为了准确还原地物的形状,需要采用地形扭曲校正方法。
3.多普勒频移校正:当目标和背景不同时,由于多普勒频移效应,目标的图像位置会发生移动。
为了还原目标的位置,需要对多普勒频移进行校正。
常用的方法有多普勒参数估计和多普勒频率补偿。
4.多次反射校正:在大斜视SAR成像过程中,雷达波除了经过正常的散射反射外,还会经历多次反射。
这些多次反射波会造成图像模糊,需要进行多次反射校正。
5.行列最终成像:经过前述校正步骤后,将各个分段的数据进行融合,进行最终的大斜视SAR成像。
常用的方法有后处理滤波、图像复原等。
6.成像结果评估:对成像结果进行评估,包括抗噪性能、分辨率、几何精度等指标。
以上是一种分段处理的大斜视SAR成像算法的基本步骤。
在实际应用中,可以根据具体需求和成像情况进行适当的调整和改进。
大斜视SAR成像算法的发展对于提高遥感图像的质量和分辨率具有重要意义,在资源管理、环境监测、地质勘查等领域具有广阔的应用前景。
SAR成像算法及其应用研究

SAR成像算法及其应用研究合成孔径雷达(SAR)通过合成大孔径天线或雷达模拟大孔径天线等技术获得极高的分辨率和距离测量精度,成为遥感、军事、海洋、气象、地球物理和石油勘探等领域不可或缺的高精度雷达。
SAR的成像算法是SAR成像的核心,它直接影响SAR成像系统的分辨率和图像质量。
本文将对SAR成像算法进行探究,并简单介绍其应用研究。
一、SAR成像算法SAR成像算法包括多普勒校正、相位解调、像元赋权等一系列的信息处理过程。
其中,多普勒校正的目的是对地物进行正确的距离测量;相位解调则是生成复合数据,提取目标的信息;像元赋权则决定了目标在合成孔径雷达观测中的光滑性质。
SAR成像算法可以分为傅里叶变换和波束形成两类。
傅里叶变换方法主要用于解决点目标的成像问题,如快速傅里叶变换(FFT)算法、极化编码算法等;波束形成方法则主要用于解决区域目标的成像问题,如扫描成像算法、斜视SAR成像算法等。
1. 快速傅里叶变换(FFT)算法快速傅里叶变换算法是目前SAR成像中最为常用的算法之一。
该算法主要用于处理单个点目标,其基本思想是对雷达信号进行傅里叶变换,将时域数据转换为频域数据,并利用频域信号的峰值位置计算目标的距离。
然后再反变换回时域,从而得到目标图像。
FFT算法具有高效、简单、精度高等优点,在实际应用中得到了广泛的应用。
2. 极化编码算法极化编码算法是一种非常适合处理点状目标的快速SAR成像算法。
在该算法中,先将多次停波的SAR信号进行脉冲压缩,对合成孔径的平面分别进行FFT,然后进行极化编码,以提高信号噪声比。
最后进行逆傅里叶变换,得到点目标的图像。
实际应用中,极化编码算法可以用于飞机、卫星、地球观测卫星等的SAR成像。
3. 扫描成像算法扫描成像算法是一种非常适合处理区域目标的SAR成像算法。
扫描成像算法主要通过扫描合成孔径雷达的波束,将二维信息变为一维信息,然后进行数据处理和图像重建。
扫描成像算法可以分为空时扫描和频移扫描两种形式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SAR 成像1 合成孔径雷达(SAR )1.1 SAR 简介合成孔径雷达(SAR)是一种可以全天候、全天时工作的高分辨率成像雷达。
它利用天线和目标之间相对运动而形成等效合成孔径,解决了雷达设计中高分辨率与大尺寸天线和短工作波长之间的矛盾,在遥感和国防中潜在着极大的应用价值。
星载SAR 一般工作在正侧视状态,但在特殊应用中,也会工作在斜视状态。
图1给出了星载SAR 正侧视模式的空间几何关系。
飞行路径在地面上的投影(地面轨迹)方向称为方位方向,而与其垂直的方向称为距离方向。
距离向使用脉冲压缩技术实现高分辨率;方位向利用多普勒效应,经过相干处理得到高分辨率。
图1 SAR 的几何关系1.2 SAR 信号模型:SAR 信号可以分为距离向信号和方位向信号。
首先考虑SAR 距离向信号。
SAR 距离像脉冲可表示为:()()20()cos 2r rs rect f K T ττπτπτ=+ (1.2.1)其中,r T 为脉冲持续时间,r K 为距离向昧冲的调频率,0f 为中心频率, τ以脉神中心为参考原点。
任一照射时刻的反射能量脉冲波形和照射区域内地面反射系数r g 的卷积,如下所示:()()()r r s g s τττ=⊗ (1.2.2) 考察距雷达0R 处的一个目标点,其后向散射系数0σ的幅度为A ,则式(1.2.2)中的()02r g A R c δτ=-,其中c 为光速,02R c 为该点的信号延时。
所以可知,该点目标的接收信号为:()()()()200002()cos 222r r rR cs Arect f R c K R c T ττπτπτφ-=-+-+(1.2.3)其中,φ表示地表散射过程可能引起的首达信号相位改变。
现在考虑方位向信号。
由于大多数SAR 天线在方位面内没有加权,其单程方向图可以近似为一个sin c 函数:()0.886sin a bw P c θθβ⎛⎫≈⎪⎝⎭(1.2.4) 其中θ为斜距平面内测得的与视线的夹角,bw β方位向波束宽度0.886a L θλ,a L 为方位向天线长度。
由于雷达能量的双程传播过程,接收信号的强度由式(1.2.4)平方给出,并且可以表示成方位时间η的函数:()()()2a a w P ηθη= (1.2.5)其中方位时间与θ的关系是()sin V R ηθη=-。
所以,点目标的接收信号可以写成:()()()()()()()()202,()cos 222r a c r R cs Arect w f R K R c Tτητηηηπτηπτηφ-=--+-+ (1.2.6)其中,()2220R R V ηη=+, 0R 为最短距离,c η为波束中心穿越时刻,上述信号其实是一个二维信号,它包含了距离同时间和方位向时间,其中题离向时间又成为快时间,而方位向时间成为慢时间。
由子接收信号()r s τ包含了雷达载}()0cos 2f πτ,在采样之前,载频必须通过正交解调过程去除。
解调后的单个点目标的基带信号可以表示成复数形式:()()()()()()()()20002,()exp 4exp 2a c r R c s A rect w j f R c j K R c Tτητηηηπηπτη-=-⨯--(1.2.7)其中,系数0A 为一个复常数()0exp A A j θ=。
1.3 分辨率1.3.1距离分辨率SAR 的距离分辨率仅由雷达发射被形的频带宽度决定。
距离分辨率有斜距分辨率r ρ(沿星载SAR 与目标的连线方向量度)和地距分辨率gr ρ(沿地量度)之分。
在评价SAR 的距离分辨率时,一般用地距分辨率。
地距分辨率和斜距分辨率有如下关系:sin gr r ρρθ= (1.3.1)斜距分辨率为:2r cBρ=(1.3.2) 其中,B 为雷达发射波形的频带宽度。
1.3.2方位分辨率SAR 处理之前的方位向分辨率为波束宽度在地面的投影,即()()'0.886ac bwaR P R L ηληθ= (1.3.3) 该式成为真实孔径雷达分辨率。
而以距离为量纲的合成孔径雷达分辨率可成:,2ga a a sV L P V ωγ= (1.3.4)其中,,a ωγ为处理中加窗引入的展宽因子。
一般的,星载SAR 情况下,1g a sV V ωγ≈,方位向分辨率可以写成2aa L P =。
这意味着方位向分辨率是天线长度的一半,与距离、速度和波长等因素无关。
这是合成孔径雷达系统最显著的特点。
1.4 SAR 的距离徙动根据()2220R R V ηη=+,瞬时斜距()R η随方位时间η而改变,为η的双曲函数。
该等式表明目标轨迹(以距离为量纲)是方位时间函数。
距离采样间隔为2r c F ,其中r F 为距离采样率。
这意味着在信号存储器中,照射时间内的目标轨迹经过不同的距离单元,因此称为“距离单元徙动”或者RCM 。
图2 目标轨迹在不同距离上的变化趋势等式()(),rd r R R f D f V ηη==给出了距离多普勒域中的斜距等式,其中()rd R f η近似f η的双曲函数。
如图2所示,在方位时域中距离 双曲函数的弯曲程度随着距离变量的增加而减小。
这是由于,从等式()22002r V R R R ηη=≈+可以看出,距离变量0R 在分母上,因此,双曲线随着0R 的增加而逐渐张开。
1.5 SAR 模糊问题1.5.1距离模糊距离模糊是指前后发射周期的一些回波信号会伴随着所期望的发射周期的回波信号同时被雷达接收,在距离向上产生模糊噪声。
如图3所示。
图3 SAR 的距离模糊原理图距离模糊现象在机载SAR 系统中并不严重.因为此时斜距比较小,观测带回波的最大延时差相对于脉冲重复周期而言是很小的.即使第一模糊区也是远离观测带的.其回波能量也将远小于观测带的回波能量.甚至可能会超出波束的照射范围.而对于星载SAR系统,由于斜距比较大,距离模糊问题必须考虑。
1.5.2方位模糊方位模糊主要是由于较低的脉冲重复频率(PRF )造成的。
因为目标回波谱是以脉冲重复频率(PRF )为周期重复出现的,在主谱之外的回波信号将折叠到主谱区,如图4所示。
图4 SAR 的方位模糊原理图距离向模糊和方位向模糊取决于脉冲重复频率(PRF)的选择和测绘带的位置。
较低的PRF 会使方位向模糊增加;较高的PRF 会增加距离向模糊,或者使测给带宽度受限。
故距离模糊和方位模糊是一对相互矛盾的量,而PRF 的选择要综合多种因素折中考虑。
2 SAR 成像算法2.1 RDA (Range-Doppler Algorithm )R-D 算法基于匹配滤波的原理,将SAR 成像中的二维联合处理简化为两个一维的级联R-D 算法的参考函数选择为接收信号频谱的复共轭,时域上是接收信号的逆时复共轭。
R-D 算法的实现步骤为,先对每个回波信号进行距离向压缩,然后在R-D 域中对距离向压缩后的数据进行距离徙动校正,在大斜视角情况下再进行二次距离压缩,最后进行方位向压缩. 2.1.1距离向压缩根据SAR 的成像原理,得到SAR 回波信号()()()()()22/4/,2/j K r s c j r s a g s W s a r s c eeπτπλτστ-⎡⎤-⎣⎦=-⎡⎤⎣⎦ (2.1.1)式中,τ是距离向的快时间变量,s 是方位向的慢时间变量,()a t 是矩形窗信号,()r s 是卫星与地面目标的距离,K 是线性调频脉冲的调频斜率,σ是点目标的后向散射系数,()a W s 是雷达天线增益由(2.1.1)式可以得到回波信号的距离向频谱()()()()()21/24/sgn /44//,j r s j K j f r s c j f Ka G s f W s eK e e e ττπλπππτσ----= (2.1.2)式中,f τ是距离向频率,p τ是发射脉冲的宽度,r p B K τ=是距离向带宽,/2r f B τ≤距离向压缩就是对(2.1.2)式进行匹配滤波,滤波函数为()()21/2sgn /4/1j K j f KT f Ke e τππτ--= (2.1.3)其时域形式为()21j K T e τπτ-=(2.1.4)滤波后的频谱为()()()224Ds c s D s D RRf R f R f f f f f f λλ=---- (2.1.5)滤波后的时域信号为()()()(){}4/a ,sin 2/j r s r a r h s B W s e c B r s c πλττσπτ-=-⎡⎤⎣⎦ (2.1.6)可见,距离压缩后的信号仍然是距离向和方位向的二维信号,距离向和方位向的耦合仍然没有解除。
2.1.2距离徙动从(2.1.6)式可以看出,经距离压缩后不同的点目标响应出现在不同的距离向上,这是由距离徙动造成的。
根据SAR 的多普勒历程,有()()()2/2/4c D c R c r s R f s s f s s λλ=---- (2.1.7)式中,c R 表示位于波束照射中心的目标与雷达之间的距离,c s 为照射到目标的时刻,D f 为多普勒中心频率,R f 为多普勒调频斜率,()c R r s R ∆=-是距离徙动。
由于时间一带宽积较大,依据驻定相位定理,驻定相位点ˆs与多普勒频率之间的锁定关系为 ()ˆ/c D R ss s f f f =-=- (2.1.8)于是时域距离徙动曲线在频域内表示成()()()224Ds c s D s D RRf R f R f f f f f f λλ=---- (2.1.9)式中,s f 是方位向频率。
为了消除距离徙动引起的距离向和方位向耦合,必须做距离徙动校正。
同一合成孔径内,不同方位但同一距离的目标点的距离弯曲具有相同的频域形式,因此弯曲校正一般在频域内进行。
对于距离走动校正,理想情况在时域校正地球自转引起的距离走动,在频域校正斜视产生的距离走动。
当距离走动不大时,时域校正简单有效.但是很小的斜视角会产生大的距离走动,超越聚焦深度,导致时域校正失效。
因此,为了提高运算效率,扩展算法的适用范围,我们在频域内进行距离徙动校正。
2.1.3距离徙动校正设雷达波束中心照射到目标的时刻c s 为时间零点,结合(2.1.9)式和(2.1.5)式,得到二维频谱 ()()()()()()2211/2//sgn /44/4/2/1,c s R c D c c R c c D s Ra s j f f f f f j f f f f f j p j R j f R cj f f f a s H f f W f eep ee eeττττππππλππσ-⎡⎤-+-+--⎣⎦== (2.1.10)式中,()11/R c p f f f τ=+。