四自由度液压搬运机械手设计
4自由度机械臂结构设计

4自由度机械臂结构设计引言机械臂是一种用于完成特定任务的机器人装置,具有广泛的应用领域,例如工业自动化、医疗手术和军事等。
本文将讨论4自由度机械臂的结构设计,以及在不同任务中的应用。
机械臂的自由度机械臂的自由度是指机械臂能够自由运动的独立关节数量。
4自由度机械臂由4个独立的旋转关节组成,使得机械臂可以在3D空间中进行平移和旋转运动。
结构设计关节结构4自由度机械臂的关节结构应具有一定的刚度和承载力,以便支撑机械臂的运动和负载。
通常采用液压或电动驱动的转动关节来实现机械臂的自由度。
每个关节应具有一定的转动范围和精度,以满足不同任务的需求。
运动范围4自由度机械臂的运动范围应能够满足各种任务的需求。
通过合理设计关节的转动范围,可以确保机械臂能够在三维空间中覆盖特定区域。
此外,机械臂的运动范围还应考虑到其在工作空间内的尺寸限制,以及与其他设备或障碍物的碰撞风险。
站立稳定性机械臂的站立稳定性是指机械臂在执行任务时,能够保持平衡和稳定的能力。
站立稳定性取决于机械臂的结构设计和重心位置。
为了确保机械臂的稳定性,可以采用合适的重心位置和支撑结构。
此外,考虑到机械臂运动时的惯性力,还需要设计相应的减振和平衡装置。
控制系统机械臂的控制系统对于实现精准的运动控制和任务执行至关重要。
控制系统包括传感器、执行器和控制算法等。
传感器用于感知机械臂末端的位置和姿态信息,执行器通过控制关节转动实现机械臂的运动,控制算法根据传感器的反馈信息进行计算和控制。
设计高效可靠的控制系统可以提高机械臂的运动精度和工作效率。
应用领域4自由度机械臂由于其灵活性和可定制性,在多个领域具有广泛的应用。
以下是几个典型的应用案例:工业自动化4自由度机械臂在工业生产线上可以完成各种简单重复的操作任务,例如搬运、装配和焊接等。
机械臂的高速度和精度可以提高生产效率和产品质量。
医疗手术4自由度机械臂在医疗手术中可以用于进行精确的手术操作,例如微创手术和精准定位。
四自由度机械手毕业设计

四自由度机械手毕业设计
四自由度机械手的毕业设计可以从以下几个方面入手:
1. 机械结构设计:根据所需的工作空间、负载要求、运动速度等参数,设计出四自由度机械手的整体结构。
其中,四自由度机械手的自由度一般包括三个旋转自由度和一个平移自由度。
2. 控制系统设计:根据机械手的运动方式和运动范围,设计出相应的控制系统。
可以采用传统的PID控制算法或者基于神经网络的控制算法,确保机械手的稳定性和精度。
3. 动力学分析:对机械手进行动力学分析,研究机械手在运动过程中的力学特性,比如加速度、速度、角加速度等参数,为机械手的优化提供理论依据。
4. 实验验证:经过机械结构设计、控制系统设计和动力学分析后,可以进行实验验证。
通过实验对机械手的运动精度、稳定性、负载承载能力等参数进行测试,对设计方案进行调整和优化。
以上只是一些可以从不同方面入手的思路,毕业设计的具体内容和难度还需要根据实际情况和要求进行具体确定。
液压式四自由度机械手设计
液压式四自由度机械手设计-(2)(总57页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--抓料机械手机构设计摘要本课题设计的为抓料机械手。
工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
因而具有强大的生命力受到人们的广泛重视和欢迎。
实践证明,工业机械手可以代替人手的繁重劳动,显着减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。
工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。
本设计拟开发的上料机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,可抓取重量较大的工件此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
本课题通过应用AutoCAD等技术对机械手进行结构设计和液压传动原理设计,它能实行自动上料运动,自动搬运棒料。
机械手的运动速度是按着满足生产率的要求来设定。
关键字机械手,AutoCAD ,自动化。
IManipulator grasping mechanism design AbstractThis paper designed for robot grasping the material . Industrial robot is the inevitable product of industrial production, which is a part of human upper limb function mimic conveying the workpiece gripping tools or equipment operation automation technology predetermined requirements of industrial automation , and promote the further development of industrial production plays important role. Which has a strong vitality by people widely valued and welcomed . Practice has proved that industrial robots can replace heavy manual labor , and significantly reduce labor intensity and improve working conditions , improve labor productivity and automation levels. Frequent handling and long term industrial production often bulky workpiece monotonic operation, using the robot to be effective . The design of the proposed development on the feeding robot can pick and place objects in space , flexible action , instead of doing so at high temperatures and can be dangerous operation area , you can grab a greater weight of the workpiece addition, it in heat, cold, deepwater , operating under the universe , radioactive and other toxic pollution environmental conditions , but also demonstrate its superiority , has a broad development prospects.IIThis topic through the application of technologies such as AutoCAD manipulator structural design principles of design and hydraulic transmission , it can implement automatic feeding movement , automatic handling bar . Is the velocity of the robot according to the settings to meet the requirements of productivity .Keywords Robot,AutoCAD,AutomationIII目录摘要............................................... 错误!未定义书签。
四自由度机械手设计

四自由度机械手的液压系统设计

圈 பைடு நூலகம்机 械 手 结 构 怎 圈
2 . 机械 手关键 液压回路分析 在 驱 动 机 械 手 运 动 过 程 中 , 其 中 夹 紧 放 松 动 作 , 旋 转 动 作 和 伸 缩 动 作 是 主 要 的 动 作 ,这 里 对 这 些动 作 的 回 路 进 行 分 析 。 ( 1 )夹 紧 回 路 夹紧 回路采 用 的是0 型 三位 四通换 向阀来 进 行 锁 定 ,如 图2 所示 。
一
机 械 手 臂 旋转 回 路 2 ~ 机 械 手 腕旋 转 回 路 3 一 夹紧回路 4 — 升 降 回 路 图 4 机 械 手 液 压 系 统 原 理 图
1 一 三 位 四通 换 向 阀
2 一 调逮阀 3 一 二 位 三 通 换 向 闻
图2 夹 紧 回 路
( 2)旋 转 回路 对 于 机 械 手 的 旋 转 动 作 , 采 用 了 液 压 马 达 实 现 , 原 理 如 图3 所示。
溢流阀
调建蝴 3
4 5
Y F — B 3 2 t l
0 一 H 1 0 I 一 2 5 1 t
2 2 E 卜l ∞ 3 4 E 1
—
2 I Ⅲ’ a . 2 5 0 L /  ̄ i n
3 2  ̄ l P a , 4 0 t . / mi 6 3 ^ a 、2 5 1 . / ∞ i n
6 3 a 、l 0 L / Ⅲ l n
单向阀
二 位 二谭 电 磁 阀 三位四通
电 磁 阀
2 5 B
6 3 M P a 、2 5 L / m i n
6 7
8 9
调速 阀 单向阀
二位二通 电 碰 谰 三 位 四姐
I I 2 O [ I F IB l 0 K l
四自由度机械手设计

四自由度机械手设计四自由度机械手是指具有四个独立运动自由度的机械手。
它可以在三维空间内进行灵活的运动和操作,广泛应用于工业制造、医疗护理、服务机器人等领域。
本文将从机械结构设计、运动控制系统、应用领域等方面进行论述,介绍四自由度机械手的设计。
首先,机械结构设计是四自由度机械手设计的关键。
通常,机械手由机械臂、末端执行器、关节驱动装置等组成。
在设计机械臂时,需要考虑结构的刚度、轻量化和尺寸设计等因素。
关节驱动装置可以采用电机驱动、气动驱动或液压驱动等方式,根据具体应用场景选择不同的驱动方式。
末端执行器是机械手最重要的部件之一,其设计要充分考虑操控对象的形状、尺寸和质量等要素。
其次,运动控制系统是确保机械手运动精度和灵活性的关键。
四自由度机械手通常采用闭环控制系统,通过传感器实时反馈机械手的位置、速度和力等信息,通过控制器计算控制命令,控制机械手的运动。
在控制系统设计中,需要考虑传感器的精度、控制器的计算能力和控制算法的设计等因素。
常见的控制算法有PID控制、模糊控制和自适应控制等。
最后,四自由度机械手应用领域广泛。
在工业制造中,机械手可以替代人工完成重复性、危险性和高精度的任务,如焊接、装配和搬运等。
在医疗护理领域,机械手可以用于手术助力、康复训练和辅助生活等。
在服务机器人领域,机械手可以用于家庭服务、餐厅服务和残疾人辅助等。
随着无人驾驶技术的普及,机械手还可以用于车辆维修保养和物流配送等场景。
总之,四自由度机械手的设计涉及机械结构、运动控制系统和应用领域等多个方面。
通过合理设计机械结构,构建高刚性、轻量化的机械手。
运动控制系统的设计保证机械手的运动精度和灵活性。
各个应用领域广泛使用四自由度机械手,提高生产效率和人类生活质量。
随着科技的不断进步,四自由度机械手在未来的应用前景将会更为广阔。
四自由度棒料搬运机械手_毕业设计

四自由度棒料搬运机械手目录摘要:本设计的机械手是基于提高劳动生产率、产品质量和经济效益,减轻工人劳动强度而设计的。
在某些劳动条件极其恶劣的条件下,工人难以用手工工作,可用本机械手代替人力劳动。
本设计为四自由度圆柱坐标型工业机械手,其工作方向为两个直线方向和两个旋转方向。
本设计中的四自由度棒料搬运机械手,主要是针对质量少于2KG的圆形棒料的搬运。
通过气爪手指的不同选择可满足直径小于60mm的棒料的搬运。
在控制器的作用下,机械手执行将工件从一条流水线拿到另一条流水线并把工件翻转过来这一简单的动作.关键词:四自由度;机械手;搬运;工业机器人The Four Degrees-of-freedom Bar Manipulator DesignsAbstract:This paper design for enhances the labor productivity, product quality, economic efficiency and reduces the worker labor intensity. Some job working at extremely bad environment, that people can’t work in hand, so the robots can replace worker to do it.This scheme introduced a cylindrical robot for four degree of freedom. It is composed of two linear axes and two rotary axis currentThis paper mainly use at the transporting of circular good material that quality is short to2KG. The different fingernail finger was Choice for transporting the good material that diameter is smaller than 60mm.Under controller function the robot move the components from one assembly line to other assembly line and turn over it in space, perform relatively simple takes.Key words: four degrees of freedom; robot; transporting; Industrial robot1 前言1.1 工业机器人的概述与发展机器人(又称机械手,机械人,英文名称:Robot),在人类科技发展史上其来有自,早在三国时代,诸葛亮发明的木牛流马即是古代中国人的智能结晶。
液压式四自由度机械手设计
液压式四自由度机械手设计工业机械手是一种模仿人手动作,并按照设定的程序、轨迹和要求代替人手抓取、搬运工件或进行操作的自动化装置。
它的用途十分广泛,对于实现生产过程自动化,提高劳动生产率,减轻工人的劳动强度,保证工人的安全都具有重要的意义,尤其对于那些有毒、危险、多粉尘、深水作业及放射性等恶劣环境和条件下的作业,使用工业机械手更具有显著的优越性。
目前,已经在机械加工、铸造、锻造、冲压生产线和某些操作作业中得到比较广泛的应用。
在热处理、焊接、涂漆及装配等生产中也开始研制和应用。
目前机械手常用的驱动方式有液压驱动、气压驱动及电动机驱动等多种方式,各种驱动方式有其自身的特点,在工业机器人中液压和气压驱动应用很广泛,有些机器人则同时采用多种驱动方式,这都视不同机器人的特点和要求所定。
由于液压驱动具有以下特点:驱动力和驱动力矩较大,速度反应性较好,调速范围较大,多用于要求臂力较大而运动速度较低的工作场合。
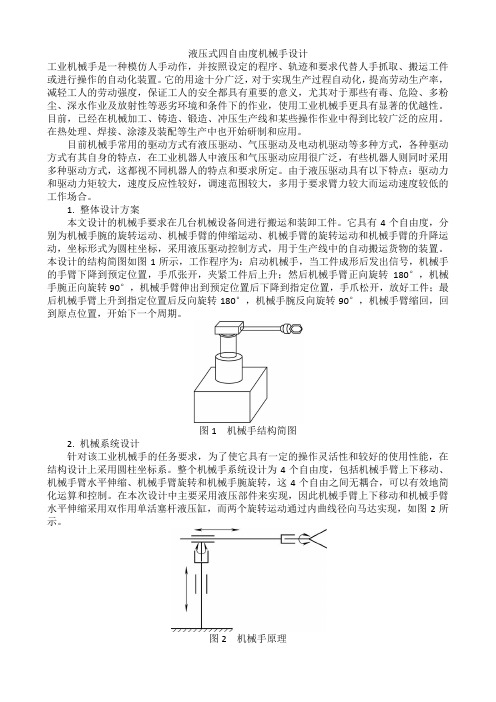
1. 整体设计方案本文设计的机械手要求在几台机械设备间进行搬运和装卸工件。
它具有4个自由度,分别为机械手腕的旋转运动、机械手臂的伸缩运动、机械手臂的旋转运动和机械手臂的升降运动,坐标形式为圆柱坐标,采用液压驱动控制方式,用于生产线中的自动搬运货物的装置。
本设计的结构简图如图1所示,工作程序为:启动机械手,当工件成形后发出信号,机械手的手臂下降到预定位置,手爪张开,夹紧工件后上升;然后机械手臂正向旋转180°,机械手腕正向旋转90°,机械手臂伸出到预定位置后下降到指定位置,手爪松开,放好工件;最后机械手臂上升到指定位置后反向旋转180°,机械手腕反向旋转90°,机械手臂缩回,回到原点位置,开始下一个周期。
图1机械手结构简图2. 机械系统设计针对该工业机械手的任务要求,为了使它具有一定的操作灵活性和较好的使用性能,在结构设计上采用圆柱坐标系。
整个机械手系统设计为4个自由度,包括机械手臂上下移动、机械手臂水平伸缩、机械手臂旋转和机械手腕旋转,这4个自由之间无耦合,可以有效地简化运算和控制。
四自由度物料搬运机械手的研制

四自由度物料搬运机械手的研制一、本文概述随着工业自动化技术的飞速发展,物料搬运机械手在生产线上的作用日益凸显。
作为一种重要的自动化设备,物料搬运机械手能够大幅提高生产效率,降低劳动成本,并在一定程度上保证产品质量。
本文旨在介绍一种四自由度物料搬运机械手的研制过程,包括其设计原理、结构特点、运动学分析以及控制策略等方面。
通过深入研究和优化,该四自由度物料搬运机械手能够实现高精度、高效率的物料搬运任务,为工业自动化领域的进一步发展提供有力支持。
文章首先概述了物料搬运机械手的研究背景和意义,指出了当前市场上物料搬运机械手的发展现状和存在的问题。
随后,详细介绍了四自由度物料搬运机械手的总体设计方案,包括机械结构、传动方式、控制系统等方面的选择和设计原则。
接着,文章对机械手的运动学性能进行了深入分析,建立了其运动学模型,并通过仿真实验验证了模型的有效性。
在此基础上,文章进一步探讨了机械手的控制策略,包括路径规划、速度控制、精度保障等方面的内容。
文章总结了四自由度物料搬运机械手的研制成果,展望了其未来的应用前景和发展方向。
本文的研究成果不仅为四自由度物料搬运机械手的实际应用提供了理论基础和技术支持,也为相关领域的研究人员提供了一定的参考和借鉴。
通过不断优化和完善,四自由度物料搬运机械手将在工业自动化领域发挥更加重要的作用,推动产业升级和转型发展。
二、四自由度物料搬运机械手的总体设计在研制四自由度物料搬运机械手的过程中,总体设计是至关重要的一步。
这一阶段主要完成了机械手的整体架构规划、自由度配置、驱动方式选择以及控制系统的初步设计。
整体架构规划:考虑到物料搬运的多样性和复杂性,我们设计了一种模块化、高度可配置的机械手结构。
该结构包括基座、旋转关节、俯仰关节、伸缩关节和抓取装置等部分。
基座负责固定和支撑整个机械手,旋转关节和俯仰关节则提供了机械手在空间中的大范围移动能力。
伸缩关节则用于微调机械手的位置,以适应不同尺寸和位置的物料。
四个自由度通用机械手设计

毕业设计说明书设计(论文)题目:四个自由度通用机械手设计学生姓名:学号:专业班级:学部:指导教师:本设计包含全部说明说及CAD图纸QQ2008年06月5日摘要摘要本次设计的多功能机械手为程四个自由度通用机械手设计,主要由手爪、手腕、手臂、机身、机座等组成,具备上料、翻转和转位等多种功能,并按自动线的统一生产节拍和生产纲领完成以上动作。
本机械手机身采用机座式,自动线围绕机座布置,其坐标形式为圆柱坐标式,具有立柱旋转、手臂伸缩、腕部转动和腕部摆动等4个自由度;驱动方式为液压驱动,且选用双联叶片泵,系统压力为2.5MPa,电机功率为 5.5KW,共有整机回转油缸、手臂伸缩油缸、手腕摆动油缸、手腕回转油缸、手爪夹紧油缸5个液压缸;定位采用机械挡块定位,定位精度为0.5~1mm,采用行程控制系统实现点位控制。
关键字:机械手;球坐标液压;机械挡块;点位控制AbstractThe current design of multifunctional mechanical hand is Hydraulic Universal Mechanical Hand, mainly consist of claw, wrists, arms, body, base and so on. With moving the materials, turnover and transfer spaces, and many other functions, the automatic line with the unified production rhythms and production program completed more moves. With the automatic production line rhythms and the production of complete reunification of the above movements, automatic line is around the machine arrange, the coordinates of the cylindrical coordinate of the form, with huge rotary, extendable arm, arm pitch, hitting and hitting back four moves freedom; Driven approach to hydraulic-driven, and the choice of double leaves pumps, the system pressure to 2.5MPa, 5.5KW electrical power for a total of whole sets of rotation tank, arm tilt cylinders, fuel tanks extendable arm, wrist swing tank, wrist rotation tank, claw clip tank six hydraulic oil tank; positioning a piece of machinery turned positioning, positioning accuracy for 0.5~1mm, using control systems to achieve their point spaces control.KeyWords:Mechanical hand. Cylindrical coordinate hydraulic. mechanical turned pieces. control point spaces目录目录摘要 ................................................................................................ 错误!未定义书签。
四自由度通用液压机械手设计
摘要本次设计的多功能机械手为液压通用机械手,主要由手爪、手腕、手臂、机身、机座等组成,具备上料、翻转和转位等多种功能,并按自动线的统一生产节拍和生产纲领完成以上动作。
本机械手机身采用机座式,自动线围绕机座布置,其坐标形式为圆柱坐标式,具有立柱旋转、手臂伸缩、腕部转动和腕部摆动等4个自由度;驱动方式为液压驱动,利用油缸、齿轮、齿条实现直线运动;利用油缸与齿轮、齿条或链条实现回转运动。
液压驱动的优点是压力高、体积小,出力大,动作平缓,并能在中间位置停止。
本次设计的机械手能对不同物体完成多种动作。
关键词:机械手;圆柱坐标;液压驱动AbstractThe design of multi-manipulator hydraulic manipulator general, mainly by the gripper, wrist, arm, body, base etc., with the material, flip, and a variety of functions such as translocation, in accordance with the unified autom ated production line beat and production program have done so. This machine adopts the base-type mobile phone, automatic wire around the base layout, its coordinates in the form of cylindrical coordinate type, with column rotation, arm stretching, wrist rotation and wrist swing and so four degrees of freedom; drive mode for the hydraulic drive, use fuel tank, gear, rack to achieve linear motion,use of tanks and gear, rack or chain to achieve rotary motion. Hydraulic drive has the advantage of high pressure, small size, contribute to a large, gentle movement and can stop in the middle. The design of the robot can complete a variety of different objects in action.Keywords: mechanical hand; cylindrical coordinate; fluid power drive目录摘要 (I)Abstract (II)目录........................................................................................... I II 第1章绪论. (1)1.1 机械手的基本概念 (1)1.2 机械手的发展现状及应用 (1)1.2.1 发展现状 (1)1.2.2 应用 (3)第2章方案的确定 (7)2.1 直角坐标型机械手 (8)2.2 圆柱坐标式机械手 (9)2.3 球坐标式机械手 (9)2.4 关节式机械手 (10)第3章手部结构设计 (11)3.1 设计的原始参数 (11)3.2 夹持式手部结构 (11)3.2.1 手指的形状和分类 (11)3.2.2 设计时考虑的几个问题 (12)3.2.3 手部夹紧油缸的设计 (13)第4章手腕结构设计 (17)4.1 手腕的自由度 (17)4.2 手腕的驱动力矩的计算 (18)4.2.1 手腕转动时所需的驱动力矩 (18)4.2.2 手腕回转油缸的驱动力矩计算 (21)4.2.3 手腕回转缸的尺寸及其校核 (22)第5章手臂工作油缸的设计与计算 (27)5.1 手臂伸缩油缸的设计与校核 (27)5.1.2 尺寸校核 (27)5.1.3 导向装置 (33)5.1.4 平衡装置 (33)5.2 手臂升降油缸的设计与校核 (33)5.2.1 尺寸设计 (33)5.2.2 尺寸校核 (33)5.3 手臂回转油缸的设计与校核 (34)5.3.1 尺寸设计 (35)5.3.2 尺寸校核 (35)第6章其它零部件的选择设计 (38)6.1 油缸的密封 (38)6.1.1 活塞式油缸的泄漏与密封 (38)6.1.2 回转油缸的泄漏与密封 (42)6.2 控制调节阀的选择 (44)6.3 辅助装置的选择 (44)6.4 液压传动机械手的缓冲与定位 (45)结论 (47)致谢 (48)参考文献 (49)CONTENTSAbstract ........................................................... 错误!未定义书签。
大学本科机械专业机械手四自由度搬运控制毕业设计

本科毕业设计题目:四自由度搬运机械手的设计学院:机械工程学院专业:机械设计制造及其自动化年级:姓名:指导教师:完成日期:年月日目录摘要 (1)Abstract (2)1引言 (3)1.1机械手研究的背景及其意义 (3)1.2机械手的研究现状和发展前景 (4)1.3机械手的种类及其应用 (4)1.4机械手研究的主要内容 (5)2机械手总体方案的设计 (6)2.1 机械手的功能以及技术要求 (6)2.2 机械手的整体结构设计 (6)2.3机械手的主要部件及其自由度 (7)2.3.1 机械手的主要部件组成 (7)2.3.2 机械手的自由度 (7)2.4 机械手的动作过程及其时间配置 (8)2.4.1 机械手动作形式及其顺序的确定 (8)2.4.2 机械手动作过程中的时间配置 (8)2.3 机械手动作过程中基本参数的确定 (9)3机械手的传动机构以及执行机构的设计 (10)3.1 机械手机构的模块化设计 (10)3.1.1 机械手结构模块划分所遵循的原则 (10)3.1.2 机械手模块化设计的一般方法 (11)3.2 机械手的组成及其模块化 (11)3.3 机械手基本结构构成及其设计流程 (11)3.3.1 机械手的基本结构 (11)3.3.2 机械手的总体设计流程 (12)3.4 机械手执行机构的设计 (12)3.4.1 机械手手部的结构设计 (13)3.4.2 机械手手部结构(夹持爪)的计算 (14)3.5 机械手手臂结构的设计 (14)3.6 机械手底座结构的设计 (16)4机械手的驱动系统的设计 (17)4.1 气动驱动系统的设计 (17)4.2 气动元件的选择 (17)4.2.1 气压泵的选择 (17)4.2.2气动系统中各控制和辅助元件的选择 (19)5机械手的控制系统设计 (21)5.1 PLC控制系统的设计步骤 (21)5.2 PLC类型的选择及I/O点的确定 (21)5.2.1 PLC类型的选择 (21)5.2.2 PLCI/O点的确定 (22)5.3 PLC程序的编制 (24)5.3.1 编写PLC程序 (24)5.3.2 制作N-S流程图 (24)5.3.3 PLC在程序编程中需要注意的具体事宜 (27)6总结及展望 (28)6.1总结 (28)6.2展望 (28)参考文献 (29)致谢 (30)四自由度搬运机械手的设计摘要机械手是由于现代科技高速发展以及其在现代工业、制造业领域中的高度应用而出现,特别是机械手在工业、制造业领域的应用使得人类从繁重的、单调的、无意义的脏、乱、差的工作环境中彻底解放出来,大大推动了人类社会的前进步伐。
四自由度棒料搬运机械手设计全套图纸

编号无锡太湖学院毕业设计(论文)题目:四自由度棒料搬运机械手设计信机系机械工程及其自动化专业学号:学生姓名:指导教师:(职称:讲师)(职称:)2013年5月25日无锡太湖学院本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)《四自由度棒料搬运机械手设计》是本人在导师的指导下独立进行研究所取得的成果,除了在毕业设计(论文)中特别加以标注引用、表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、集体已发表或撰写的成果作品。
班级:学号:作者姓名:2013 年5 月25 日无锡太湖学院信机系机械工程及其自动化专业毕业设计论文任务书一、题目及专题:1、题目四自由度棒料搬运机械手设计2、专题二、课题来源及选题依据机器人工程是近二十多年迅速发展起来的,目前已应用与许多生产领域。
由目前的发展状况看,在可预见的将来它将在生产中扮演越来越重要的角色。
本机械手就是基于此并为提高劳动生产率、产品质量和经济效益,减轻工人劳动强度而设计的。
在某些劳动条件极其恶劣的条件下,工人难以用手工工作,可用本机械手代替人力劳动。
在社会不断发展的今天,机器人在工业现场中的应用也越来越广泛,用机器的力量代替人力,而将人类从繁重的体力劳动中解放出来是历史发展的趋势。
三、本设计(论文或其他)应达到的要求:1、机械手的总体设计,包括型式选择、基本参数确定、总体布置与主要结构设计。
并绘制整体装配图。
2、机械手传动机构的设计,包括滚珠丝杠的选择,谐波齿轮减速器参数的确定。
3、机械手各种电机的选择。
包括机械手手臂升降步进电机的选择,机械手底座回转驱动电动机的选择。
4、机械手各气动件的设计计算。
5、设计说明书一份。
6、所有非标零件需画出零件图。
四、接受任务学生:机械92 班姓名五、开始及完成日期:自2012 年11月12日至2013年5 月25日六、设计(论文)指导(或顾问):指导教师签名签名签名教研室主任〔学科组组长研究所所长〕签名系主任签名2013年5月25日摘要在社会不断发展的今天,机器人在工业现场中的应用也越来越广泛,用机器的力量代替人力,而将人类从繁重的体力劳动中解放出来是历史发展的趋势。
四自由度搬运机械手液压系统设计

最大 工作半 径 :70mm 10 手臂 最大 中心 高度 :00mm 10 手臂 运动参 数 :
伸缩 行程 :0 m 70m
伸缩 速度 :.0m s 0 3 / 升 降行程 :5 m 3 0m 升 降速 度 :.5m s 0 0 /
图 1 四 自由度 搬 运 机 械 手 结 构 示 意 图
A
力确, 内 / 来定 缸径 油
l 3 /
式中: P— — 活塞 承受 的最 大推 力 ( , =P + + N)P +P 2+P , 中 , 、 1 、 P 分 别 为 作用 在 活 3其 PlT 、 P 、3 塞 上 的总推 力 、 活塞 密封 与油缸 内孔 的摩 擦力 、 塞杆 活 与 缸盖 或导 套处 的摩 擦 力 、 回油 腔 中 的背 压力 和运 动 部 件 的惯性 力 ; 为油 缸 的机 械 效率 ;p为 油 缸进 出 叼 △
2 1 液压缸 的设 计计 算 . 1 )液压 缸 内径 D及 活塞杆 直径 设计 计算 油 缸 的 内径 D 由油 缸 所 需 输 出 的 最 大 拉 力 或 推
:
孚。 :
华 :
×2 0 . 5
×6 0 . 0
4. 0 1 9 6 X 0~m /s
升 降缸 的流量 :
运机 械手液 压 系统原 理 图如图 3所 示 。
收稿 日期 :0 1 53 2 1 - -0 0
图 2 机 械 手 夹 持 部 分 结 构 图
作者简介 : 耿跃峰 ( 98 ) 男 , 17 一 , 河南汝州人 , 师 , 讲 主要从 事 机械 电子及其控制方面的教学与研 究工作 。
4 2
液压与 气动
21 0 2年第 2期
四自由度搬运机械手的设计毕业论文
四自由度搬运机械手的设计毕业论文摘要:机械手作为自动化装置中的重要组成部分,广泛应用于工业生产线、仓储物流等领域。
本论文以四自由度搬运机械手设计为研究对象,对机械手的动力学和控制系统进行分析和优化设计。
通过对机械手的结构设计、动力学建模和控制算法的优化,进一步提高机械手的工作效率和精度。
论文总结了机械手设计中的关键问题,并给出了相应的设计和优化方案。
实验证明,该设计方案在搬运工作中具有较好的性能表现。
关键词:机械手;搬运;动力学;控制系统1.引言机械手作为一种重要的自动化装置,广泛应用于工业生产线、仓储物流等领域,实现了对物体的自动化搬运和装配。
机械手的设计涉及到多学科知识的综合运用,包括机械工程、电子工程、控制科学等。
本论文以四自由度搬运机械手设计为研究对象,对机械手的动力学和控制系统进行分析和优化设计。
2.机械手的结构设计在机械手的结构设计中,考虑到搬运过程中的工作负荷和工作空间的要求,选择了四自由度机械手结构。
该结构由基座、臂架、运动链和机械手末端执行器等部分组成。
基座为机械手提供了稳定的支撑,并具备旋转自由度。
臂架通过关节连接基座和运动链,增加了机械手的活动范围。
运动链通过关节连接臂架和末端执行器,实现了机械手的搬运动作。
3.机械手的动力学建模机械手的动力学建模是机械手设计中的重要步骤,通过建立机械手的运动学和动力学方程,可以预测机械手在搬运过程中的运动轨迹和力学特性。
本论文采用牛顿-欧拉法建立了机械手的动力学方程,并通过计算机仿真验证了动力学模型的准确性。
4.机械手的控制系统设计机械手的控制系统设计是机械手设计中的另一个关键问题,其目标是实现机械手的精确定位和力控制。
本论文采用PID控制算法对机械手的位置和力控制进行了优化设计,并结合机械手的动力学特性进行了参数调节和鲁棒性分析。
实验证明,该控制系统具有较好的性能表现,能够满足机械手在搬运过程中的控制要求。
5.结论通过对四自由度搬运机械手的设计进行了详细分析和优化,本论文提出了一种高效、精确的机械手设计方案。
4自由度液压缸机械臂机械结构设计
4自由度液压缸机械臂机械结构设计下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
此文下载后可定制随意修改,请根据实际需要进行相应的调整和使用。
并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Downloaded tips: This document is carefully compiled by the editor. I hope that after you download them, they can help you solve practical problems. The documentscan be customized and modified after downloading, please adjust and use it accordingto actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!《4自由度液压缸机械臂机械结构设计》。
四自由度搬运物料工业机器人的毕业设计

四自由度搬运物料工业机器人的毕业设计工业机器人搬运物料,是当前自动化生产和智能制造的重要组成部分。
搬运物料是生产线中的关键环节,传统的人工操作存在劳动强度大、效率低、易出错等问题,而工业机器人通过四自由度的灵活操作,可以高效地完成物料的搬运任务。
在这篇毕业设计中,我将探讨四自由度搬运物料工业机器人的设计与实现。
首先,我们需要确定机器人的工作空间和负载能力。
根据物料的尺寸和重量,确定机器人的伸展长度和负载能力。
四自由度机器人通常由一个固定基座和三个旋转关节构成,可以实现物料的水平搬运、转向搬运等多种操作。
接下来,我们需要选择合适的传感器和执行器。
传感器可以用于检测物料的位置、尺寸和重量,以便精确定位和分配搬运任务。
常见的传感器包括视觉传感器、力传感器等。
执行器可以根据传感器的反馈信号,实现机器人的精准控制和动作执行。
然后,我们需要设计机器人的运动规划和控制算法。
运动规划算法可以根据物料的位置和目标位置,计算机器人的最佳运动轨迹,以便实现高效的搬运任务。
控制算法可以根据传感器的反馈信号,实时调整机器人的位置和姿态,以确保搬运任务的精准执行。
最后,我们需要建立机器人的模型并进行仿真测试。
通过计算机辅助设计和仿真软件,可以建立机器人的虚拟模型,并验证设计的合理性和可行性。
通过仿真测试,可以发现设计中存在的问题,并进行必要的改进和优化。
综上所述,四自由度搬运物料工业机器人的毕业设计主要包括确定工作空间和负载能力、选择传感器和执行器、设计运动规划和控制算法以及建立模型进行仿真测试等环节。
通过合理的设计和实现,可以使工业机器人在搬运物料方面发挥出更大的作用,提高生产效率,降低劳动强度,推动智能制造的发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四自由度液压搬运机械手设计摘要: 通过对机床工件搬运机械手主要结构和运动形式的探究,以及对机械手的工作过程和控制要求分析,根据机械手动作循环图设计液压系统控制图;并采用欧姆龙控制器系统进行电气部分的软硬件设计,绘制了 PLC 的外部接线图和单循环自动工作状态流程图,将 PLC 技术应用于机械手具有整体技术及经济效益Abstract: The hydraulic system control was designed according to the cycle operation of manipulator,through the study of main structures and movement forms of the manipulator and the analysis on working processes and control requirements of the manipulator. The software and hardware design for the electrical part was done by using the Omron controller system. The external wiring diagram and automatic single cycle working state flow chart of the PLC were drawn. The application of PLC to manipulator would have technological and economic benefits.关键词:机械手,四自由度,搬运,液压驱动,PLC控制Key words: manipulator; Four dof handling PLC control hydraulic system 1、结构设计方案1.1机械手的机械结构常见的工业机械手根据手臂的动作形态,按坐标形式大致可分为以下4种:(1)直角坐标型机械手;(2)圆柱坐标型机械手;(3)极坐标系机械手;(4)多关节型机械手1.1.1机构原理这里的机械手可完成的动作有夹紧工件、手臂转位、松开卸料、手臂复位等基本动作,该机械手可看成是一个由4个自由度构成的机构(各组成部分的定义如图1所示)四自由度分别为基座的旋转、立柱的升降、大臂的伸缩以及小臂的旋转。
图一机械手的结构示意图2、驱动方案设计2.1 液压驱动系统2. 1.1 液压回路的设计图二液压系统控制图机械手动作顺序: 从原位开始右转升降臂下降伸缩臂伸出夹持器夹紧升降臂上升左转升降臂下降夹持器松开伸缩臂缩回升降臂上升,到原位若为单循环模式下运行,则原位等待,若为连续循环模式,则进入下一个周期上述动作均由行程开关或压力继电器发讯号控制相应的电磁换向阀,按程序依次顺序动作而实现(王增娣,2012) 。
拟定的液压系统图如图二2.2 液压系统分析1) 夹持器采用单出杆双作用缸,保证运动过程中夹紧工件,当夹持器夹紧工件后,由液控单向阀组成的锁紧回路可在意外失电的情况下,保持对工件的夹紧;2) 小臂回转采用摆动液压缸,正反方向均采用单向调速阀调速。
由于回转部分的重量大,悬臂较长,转动惯量大,手臂回转时具有很大的动能。
因此,采用调速阀回油节流调速,有缓冲作用;3) 手臂伸缩采用单出杆双作用缸,手臂伸出时,由单向调速阀进行回油节流调速,回油路调速阀的设置可以完成缓冲作用( 张文汉,2008) ;4) 手臂升降运动采用单出杆双作用缸,上升和下降均由单向调速阀回油节流调速。
因为升降缸为立式,在其液压缸下腔油路中安装单向顺序阀,避免因整个手臂的自重而下降,起平衡作用3、控制方案设计3. 1 PLC 的选型3. 1. 1 I /O 点数的估算机械手采用行程开关进行位置检测,根据下图所示, PLC 需要对电磁阀进行控制,当到达行程之后,使某一电磁铁得电或失电,使液压缸换向输入输出点如表1(付愚, 2005) 。
3. 1. 2 PLC 机型选择由上表 1 知: 输入 20 点,输出 9 点,总点数为29 留出20 %的余量: 总点数为29 + 6 = 35 点故选择40 点的 CPM2A- 40CDR- A 继电器触点输出型的 CPU 单元,有24 点输入, 16 点输出程序容量: 8× 35 = 280 字( 普通系K=8)图三 PLC接线图根据所选欧姆龙的 CPM1A- 40CDR- A 系列的内部元件及输入输出的相关元件、设备,编制出 PLC接线图,如图三所示3. 2 程序设计程序功能: 泵单按钮起动,泵起动后,机械手才能有动作; 操作分为手动模式和自动模式,自动模式又分为单周期运行和连续自动运行,手动采用点动方式,机械手在等待状态下,泵自动卸荷。
其状态流程图如图5 所示3. 3 助记符程序:LD 00108 泵起停DIFU( 13) 2000LD2000LD2000AND 01100KEEP( 11) 01100 泵单按钮起停控制LD NOT 00201AND NOT 00202AND NOT 00203AND NOT 00204AND NOT 00205AND NOT 00206AND NOT 00207AND NOT 00208AND NOT 00209AND NOT 00210AND 01100OUT 00200 手动等待/自动切换( 按下起动按钮00008 为 ON 后,自动进入自动模式)LD 00210AND 00009AND 00003LD 00200AND 00008OR LDOR 00201AND NOT 00202 AND NOT 00007 OUT 00201 工步1 LD 00201OR 00202AND 00000AND NOT 00203 AND NOT 00007OUT 00202 工步2LD 00202OR 00203AND 00004AND NOT 00204AND NOT 00007OUT 00203 工步3LD 00203AND 00104OR 00204AND NOT 00205AND NOT 00007OUT 00204 工步4( 部分)参考文献1 液压机械手技术与市场 1997-06-28 期刊 0 2762 基于PD型迭代学习的液压机械手轨迹控制张琦湖南科技大学学报(自然科学版) 2005-03-30 期刊 6 1683 基于机电液一体化的液压机械手设计及其控制赵旭东北大学 2010-06-01 硕士4 深海水下液压机械手驱动系统压力适应型控制器研制张艳浙江大学 2012-02-10 硕士5 放射源运输车及其应用液压机械手的设计研究贾起军吉林大学 2011-10-01 硕士326 基于液压机械手的绿化带自动浇灌装置设计王增娣机械工程与自动化 2012-12-15 期刊7 基于PLC的液压机械手控制系统改造张文汉科技广场 2008-07-01 期刊 1 1778 基于PLC的液压机械手的控制系统付愚湖南工程学院学报(自然科学版) 2005-06-25 期刊 4 5929 Lopez-Guede, J.M.,Fernandez-Gauna, B.,Graa, M. et al.Improving the control of single robot hose transport[J].Cybernetics and Systems,2012,43(1/4):261-275.10 Nouyan, S.,Gross, R.,Bonani, M. et al.Teamwork in Self-Organized Robot Colonies[J].IEEE transactions on evolutionary computation,2009,13(4):695-711.考文献目录序号题名作者来源发表时间来源数据库被引频次下载频次1 液压机械手技术与市场 1997-06-28 期刊 0 2762 基于PD型迭代学习的液压机械手轨迹控制张琦湖南科技大学学报(自然科学版) 2005-03-30 期刊 6 1683 基于机电液一体化的液压机械手设计及其控制赵旭东北大学 2010-06-01 硕士4 深海水下液压机械手驱动系统压力适应型控制器研制张艳浙江大学 2012-02-10 硕士5 放射源运输车及其应用液压机械手的设计研究贾起军吉林大学 2011-10-01 硕士326 基于液压机械手的绿化带自动浇灌装置设计王增娣机械工程与自动化 2012-12-15 期刊7 液压机械手电液比例系统模糊PID控制研究杨晶机械科学与技术 2013-06-15 期刊8 一种全自动液压机械手在马钢车轮公司的应用虞长银安徽冶金科技职业学院学报2011-01-15 期刊 0 579 基于AMESim的液压机械手负载敏感系统仿真研究王光磊矿山机械 2011-12-10 期刊 1 13610 三自由度液压机械手的PLC控制研究詹贵印可编程控制器与工厂自动化2007-07-15 期刊 3 61811 四自由度液压机械手液压系统设计胡海洪南昌大学 2012-06-30 硕士12 基于PLC的液压机械手控制系统改造张文汉科技广场 2008-07-01 期刊 1 17713 液压机械手科技简报 1975-03-12 期刊 0 11214 分解组装制动缸液压机械手铁道车辆 1977-04-01 期刊 0 2315 液压机械手握力的软抓取控制林建亚液压与气动 1987-05-01 期刊 1 7716 PC在全液压机械手中的应用姜佩东冶金自动化 1990-10-28 期刊 0 3917 复杂柔性车载液压机械手振动主动控制方法研究马振书系统仿真学报 2011-09-08 期刊 0 5418 基于PLC的液压机械手的控制系统付愚湖南工程学院学报(自然科学版) 2005-06-25 期刊 4 59219 配电作业液压机械手系统沼波正卫水利电力施工机械 1994-05-15 期刊 0 3420 数控机床液压机械手的PLC控制系统王焱玉机床与液压 2005-04-30 期刊 8 49421 关节式液压机械手脉码调制控制研究王宣银机械工程学报 2002-12-30 期刊 0 9022 新型液压升船机的设计和研究李昕涛中北大学学报(自然科学版) 2007-08-15 期刊 1 7923 水下作业液压机械手夹持力模糊控制技术的研究谭定忠机床与液压 2001-02-28 期刊 2 12924 基于多传感器信息融合的液压机械手控制模型研究张琦机床与液压 2005-03-30 期刊 2 13725 人工神经网络在机械手动力学辨识和位置控制中的应用陈默子机器人 1993-10-28 期刊 9 12426 液压机械手捣固机的研制杜丽红铁道建筑 2010-08-15 期刊 1 6027 压力适应型深海水下液压机械手及主从式多关节复合控制研究章艳浙江大学2006-11-01 硕士 4 30828 复杂柔性车载液压机械手弹性动力学建模方法研究马振书中国机械工程2010-01-25 期刊 0 15929 用于方形物件装卸液压机械手的设计何芹机床与液压 2010-09-28 期刊 1 15230 基于三菱FX1N PLC的液压机械手控制系统设计裴艳芳机床电器31] Lopez-Guede, J.M.,Fernandez-Gauna, B.,Graa, M. et al.Improving the control of single robot hose transport[J].Cybernetics and Systems,2012,43(1/4):261-275. [32] Nouyan, S.,Gross, R.,Bonani, M. et al.Teamwork in Self-Organized Robot Colonies[J].IEEE transactions on evolutionary computation,2009,13(4):695-711. [33] Nouyan, S.,Gross, R.,Bonani, M. et al.Teamwork in Self-Organized Robot Colonies[J].IEEE transactions on evolutionary computation,2009,13(4):695-711. [34] Zhang, D.,Wang, L.,Yu, J. et al.Coordinated Transport by Multiple Biomimetic Robotic Fish in Underwater Environment[J].IEEE Transactions on Control Systems Technology,2007,15(4):658-671.DOI:10.1109/TCST.2007.899153.[35] Bernheisel, J.D.,Lynch, K.M..Stable transport of assemblies: pushing stacked parts[J].IEEE transactions on automation science and engineering,2004,1(2):163-168.DOI:10.1109/TASE.2004.835575.。