全站仪三角高程代替三-四等水准测量可行性
也谈全站仪测距三角高程代替几何水准测量

第5期也谈全站仪测距三角高程代替几何水准测量孙向晨(新疆维吾尔自治区有色地质勘查局地球物理探矿队乌鲁木齐830011)摘要运用三角高程测量原理,通过具体实例,证明全站仪测距三角高程导线在满足一定条件下采用直返觇观测,其测量成果能够满足水准测量精度要求,在实际工作中可推广应用。
关键词全站仪电磁波测距三角高程水准测量1概述传统的高程测量方法主要有水准测量、经纬仪三角高程测量,这两种方法各有特色,但都存在着不足。
水准测量是一种直接测高法,测定高差的精度较高,但其受地形起伏的限制,外业工作量大,施测速度较慢;经纬仪三角高程测量是一种间接测高法,它不受地形起伏的限制,施测速度较快,但精度低。
近十多年来发展和快速掘起的电子速测仪即全站仪,具有测程远、精度高、操作简单、功能齐全、可进行数据存取和通信以及自动化程度高等特点,普遍地运用于各种工程建设和测绘生产实践中。
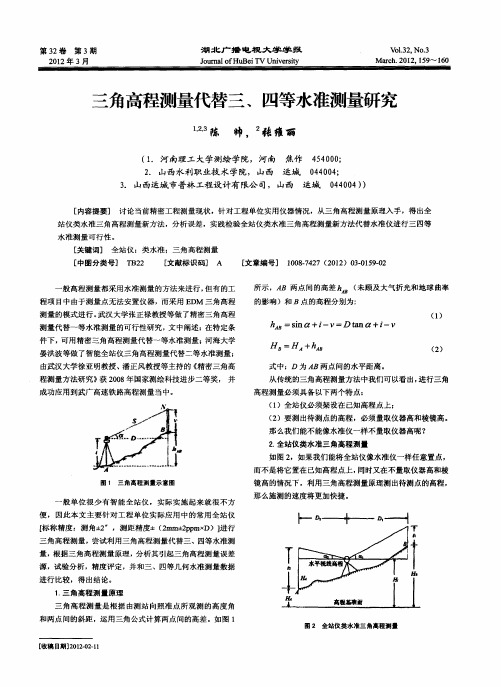
2三角高程测量原理三角高程测量是通过观测两点间的水平距离和天顶距(即竖直角)求定两点间高差的方法。
它观测方法简单,不受地形条件限制,是测定大地控制点高程的基本方法。
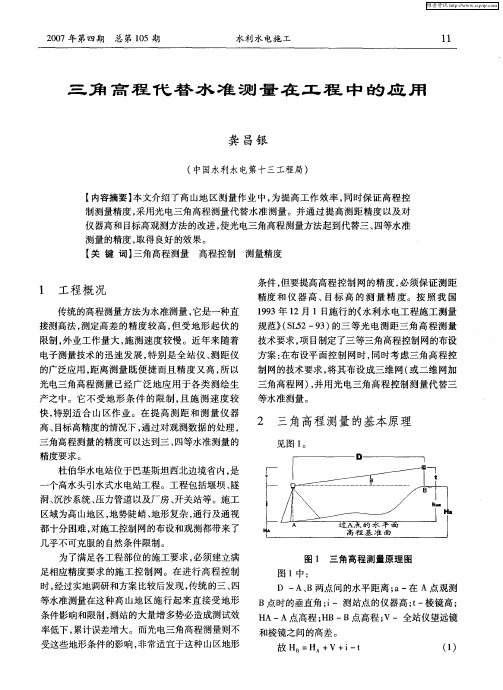
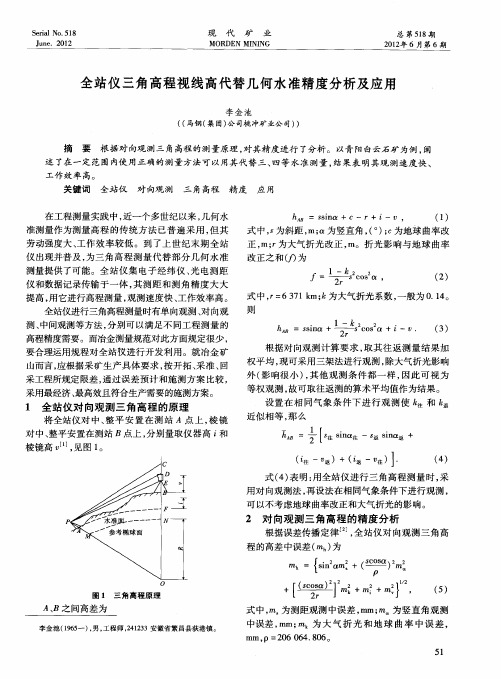
三角高程测量的基本原理见图1,A、B为地面上两点,自A点观测B点的竖直角为α1.2,S0两点间水平距离,i1为A点仪器高,i2为B 点觇标高,则A、B两点间高差为:h1.2=S0tgα1.2+i1-i2(1)这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
因此,只有当A、B两点间的距离很短时,才比较准确。
当A、B两点距离较远时,就必须考虑地球曲率和大气折光的影响了[1]。
这里对球差和气差的改正不在赘述,只就三角高程测量的一般原理进行阐述。
3测距三角高程精度分析3.1大气垂直折光的影响众所周知,大气层是个既不平稳,又不均匀的随机场,它在许多因素的影响下不断地随时间、空间的不同而迅速地变化着。
用全站仪进行高程传递,所测的高差除了测距、测角、量仪器高和镜高误差影响外,还包括大气折射对电磁波传播的影响。
全站仪三角高程测量的精度分析
牛 东峰 1 董 婉 丽 2
( 1中冶集 团武汉勘 察研 究 院有 限公 司 湖北 武 汉
摘
4 0 8 2吉林 市规 划局 检 察支 队 吉林 吉林 300
12 1 ) 3 0 1
要 : 站仪 三 角高程 测量具 有效 率 高 、 全 实施灵 活等优 点 , 经研 究 并通过 实践验 证 , 对观测 结果 进 在
参 考 文 献 1 闫修 林 . 增 苗 . 波 图 技 术 在 雷 达 终 端 阮 杂
系列 处理 .完 成 后 传送 N RC通 道 输
出及 控 制参 数 .同时 在 引脚 F A 上 L G1
产生低 脉 冲 .使 AD P 4进 入 中断服 务 S#
程序 , 收 由 A S # 送 出的数 据 。 接 DP1
有 限 , 前 只 在 中 、 比例 尺地 形 图测 以 小
1 三 角 高 程测 量 高差 计 算
11 三角 高程测 量高 差计 算原 理 .
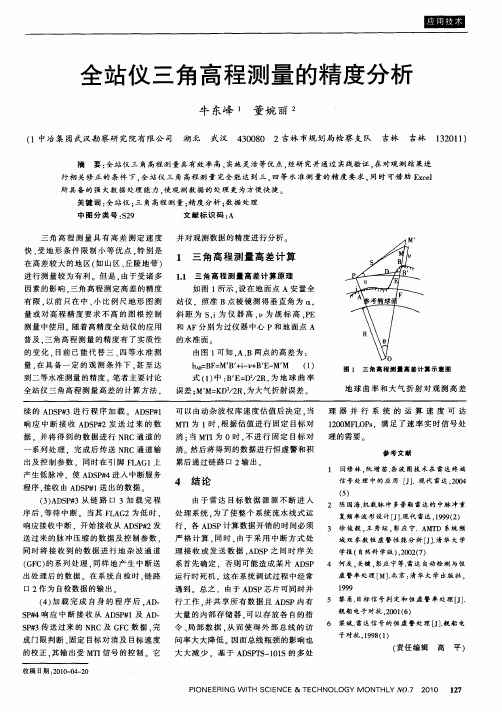
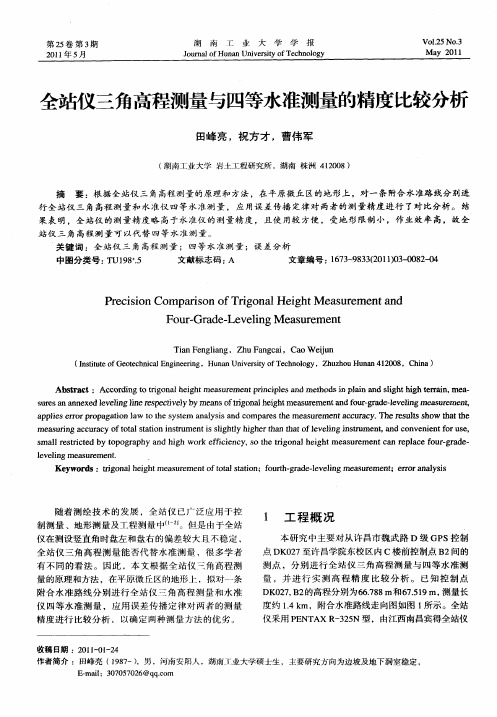
如 图 1所 示 . 在 地 面 点 A 安 置 全 设
站仪 .照 准 B点 棱镜 测 得垂 直 角 为 . 斜 距 为 S, 为 仪 器 高 , i v为 觇 标 高 , E P 和A F分别 为 过仪 器 中心 P和地 面点 A
2 陈 国海. 机栽 脉 冲 多普 勒雷达 的 中脉 冲重 复频 率波形 设计 [ ] J. 现代 雷达 ,9 9 2 19 ( ) 3 徐俊 毅 , 秀坛 , 王 彭应 宁.AMT 系统 频 D
响 应 接 收 中断 .开 始 接 收 从 AD P 2发 行 .各 AD P计算 数据 开销 的 时间必 须 S# S
的 水 准 面
GPS高程代替四等水准的可行性分析

GPS高程代替四等水准的可行性分析吴经鹏(贵州省有色金属和核工业地质勘查局三总队,贵州 遵义 563004)摘 要:GPS全球定位系统逐渐成熟,为行业带来了很多经济利润,而GPS定位系统的成熟推广,使得经典测绘技术行业内引发了深刻的技术变革。
如使用GPS高程拟合原理,并利用准确的四等水准测量,对于其工程案例加以探究,就可以发现,GPS高程测量工程的作业方式和工作效率研究表明,GPS高程结合四等水准的测量可行性高,其测绘成果的精度水平高,与传统的几何水准测量相比的差异性较为明显。
因此,将GPS高程测量精度指标与四等水准要求进行结合,探讨GPS定位测绘技术-四等水准发展的可行性,将是本文重点探讨的内容。
关键词:GPS高程;四等水准;代替性;可行性中图分类号:P228.4 文献标识码:A 文章编号:1002-5065(2020)21-0200-2Feasibility analysis of substituting GPS elevation for fourth grade levelingWU Jing-peng(The third general team of Guizhou Nonferrous Metals and Nuclear Industry Geological Exploration Bureau,Zunyi 563004,China)Abstract: GPS global positioning system is gradually mature, which brings a lot of economic profits to the industry, and the mature promotion of GPS positioning system makes the classic surveying and mapping technology industry cause profound technical changes. If we use the principle of GPS height fitting, and use the accurate fourth-order leveling, we can find that the operation mode and work efficiency of GPS height survey project show that the feasibility of combining GPS height with fourth-class leveling is high, and the accuracy level of Surveying and mapping results is high, and the difference is obvious compared with the traditional geometric leveling. Therefore, combining the accuracy index of GPS height survey with the requirements of the fourth class leveling, and discussing the feasibility of the development of the fourth level of GPS positioning surveying and mapping technology will be the focus of this paper.Keywords: GPS elevation; fourth order leveling; substitutability; feasibility在当下,GPS技术凭借全天候精准定位、实时定位和高精度定位的优势被广泛地应用于各行各业。
精密三角高程测量的探讨

精密三角高程测量的探讨摘要:随着高精度测距仪的普及应用,用三角高程测量代替水准测量建立高程控制网,可以大大加快野外测量的速度。
本文在分析三角高程测量误差来源及测量精度分析影响的基础上,推导了全站仪三角高程测量的计算公式,并运用误差传播定律导出了高程测量精度计算公式,分析了有关误差影响对高程测量精度的影响。
本文用AIcATCAZoo3精密全站仪,采用三角高程测量的方法,用于地形复杂的困难条件下代替一、二等水准测量的可行性进行研究。
通过实验证明,在一定范围内可用全站仪代替水准仪进行高程测量可达到一、二等水准测量的精度要求。
最后介绍了全站仪三角高程测量在大坝安全监测工程中的实际应用情况。
关键词:三角高程测量,高程测量控制网,测量精度一、三角高程测量测量原理1.如图2一2所示,欲测定地面A、B两点间高差h‘。
,则在A点安置仪器,在B点竖立标尺,量取仪器望远镜旋转轴中心I至地面点A的仪器高i,用望远镜十字丝的横丝照准B点标尺上的一点M,M至B点的垂直高度称为目标高v,测出倾斜视线甜与水平线间所夹的竖直角a,若已知A、B两点间的水平距离为S,则由图2-2可得两点间的高差h为:ab在水准测量中地球曲率的影响可以在观测中使用前后视距相等来抵消。
三角高程测量在一般情况下也可以将仪器设在两点等距离处进行观测,或在两点上分别安置仪器进行对向观测并计算各自所测得的高差取其平均值,也可以消除地球曲率的影响。
但在有些情况下应用三角高程测量测定地面点高程则不然。
未知点到各已知点的距离长短不一,并且是单向观测,因此必须考虑地球曲率对高差的影响。
2.单向观测计算高差的基本公式代替四等水准的光电测距高程导线主要技术要求是:l)起算高程点不低于三等水准点(或观测点)。
2)导线各边边长不应大于1km,高程导线的最大长度不应超过四等水准路线的最大长度(15km)。
4.垂直角的观测方法垂直角的观测方法有中丝法和三丝法两种。
4.1中丝法中丝法也称为单丝法,也就是用望远镜十字丝的水平中丝照准目标,一个测回的观测程序为:在盘左位置,用水平中丝照准目标,将水准气泡精密符合后读取垂直读数,取得盘左读数L。
三角高程代替水准测量在工程中的应用
③观测斜距 。采用对 向观测的方法进行斜距 的观测 , 单程观测两测 回, 每测 回读数 四次。一测
U - -U UZ
回读 数 较 差 不 超 过 3 m, 程 测 回较 差 不 超 过 m 单
图2
5 m, 返测较 差不 超过 2 a+ D 。 m 往 ( b )
洞、 沉沙 系统 、 力管道 以及 厂房 、 压 开关 站 等 。施 工
区域为高山地区, 地势陡峭、 地形复杂, 通行及通视 都十分困难 , 对施工控制网的布设和观测都带来了 几乎不可克服的 自 然条件限制。 为了满足各工程部位的施工要求 , 必须建立满 足相应精度要求 的施工控制 网。在进行高程控制 时, 经过实地调研和方案 比较后发现 , 的三 、 传统 四 等水准测量在这种高山地 区施行起来直接受地形 条件影响和限Байду номын сангаас , 测站的大量增多势必造成测试效
一
引垂球 , 直至垂线过水平尺 , 保持垂线 自由下垂并
静止 , 这样 仪器 中 心沿垂线 至水平 尺底端 的距 离 即
0 6和 点 D 1 K—C P一0 7为 已 知 点 , K—P 1 D P一
0 1D 0 , K—P 02和 D P 03为加 密未知 点 P一 0 K— P一 0
为仪器高。用钢卷尺沿垂线重复观测 3次, 读数至 m 结果取中数。这样测得 的仪器高精度可保证 m, 在 ±m 1 m内, 满足三等三角高程测量的精度要求 。 同样的方法 , 目标站可精确测得棱镜 ( 在 觇牌) 。 高 ②读取测站的气象数据。在测距之前 , 必须测 量气象数据即温度和气压值。温度计应悬挂在测
方案 : 在布设平面控制网时, 同时考虑三角高程控 制网的技术要求 , 将其布设成三维 网( 或二维网加 三角高程网) 并用光 电三角高程控制测量代替三 ,
全站仪三角高程代替水准测量

全站仪三角高程代替水准测量研究摘要:通过对全站仪三角高程测量与水准仪水准测量原理的对比分析,探讨在满足精度要求条件下用全站仪代替水准仪进行水准测量的可行性。
关键字:全站仪,水准测量,精度传统的水准测量虽然精度很高,但是在丘陵、山地等坡度变化较大的地区却会受到很大限制,不但测量困难度很大,因为测站太多,精度也无法保证。
同时,随着全站仪在测量工作中的应用和普及,其简单便捷、操作灵活、功能多、精度高的特点引起了测量人员的广泛关注。
如果能够将全站仪应用于精密高程测量中,那么在坡度变化较大地区进行高程测量时,工作效率和精度都会得到极大提高。
本文结合全站仪三角高程测量的特点和不受地形条件限制的优势,分析全站仪三角高程测量在水准测量中的应用前景。
一、传统三角高程测量原理:如图(1),s是a、b两点间测得的水平距离,弧pe和弧af分别为过p点和a点的大地水准面,弧pn为由于大气折光影响而产生的光程曲线,而仪器置于a点测得的倾斜视线为弧np曲线的切线方向pm,从而产生切曲差f。
倾斜视线pn与水平视线pc的夹角则为垂直角。
欲测定地面上a、b两点的高差,在a点设置全站仪,b点放置棱镜,量取仪器高i, 棱镜高v,则:= +i-v+f(1)若a点高程已知为 ,则b点高程为:= + = ++i-v+f(2)式中:为实测平距,为竖直角,f为球气差改正数,f=p-r 不同距离d时f的计算式为f=0.42(取r=6370km),d为实测平距s投影到大地水准面后的距离。
在非高山地区,s与d相差甚微,可以视为近似相等;但是在青藏高原等高海拔地区,则必须加入距离改正,将观测距离s投影到大地水准面化为距离d后进行计算。
二、全站仪精密三角高程测量代替水准测量探讨研究如图(3), 设观测时c为测站,a和b 为目标点,、为ac 和cb 之间经气象改正和投影归化后的水平距离,、r 为全站仪照准棱镜中心的竖直角, i为仪器高, v为棱镜高欲测定地面上a、b两点的高差,在a、b两点之间约中点c处架设全站仪,a、b两点竖立等高棱镜,则:= +i-v+f1= +i-v+f2式中:、r均为竖直角, = = ,由球气差改正数f的公式可知f1=f2,相互抵消。
精密三角高程测量

武汉大学测绘学院
潘正风
常规高程测量方法
几何水准测量目前仍是高程测量的主要方法, 测量精度高、操作简单是这种方法的优势。但视 线短、速度慢、劳动强度大。三角高程测量的精 度主要受高度角观测精度的限制和大气折光的影 响,限制了三角高程测量的应用。但可在较长的 距离上测量。因此,测量人员一直在研究,提高 三角高程测量的精度,在一定的精度范围内,代 替几何水准测量。
同理
短距离双向三角高程计算公式
长距离三角高程测量计算公式
点P1 观测目标P2 ,相对于 参考椭球面的大地高为h1 和 h2 , Z为大地天顶距。视线两 端点在椭球上的投影以m 和 n 表示。椭球中心 O,旋转轴 通 过极P 。b 椭球法线端点在旋 转轴上的位置以 n1和n2 表示, 而mP 和nP 是子午线。
• 在测段水准点附近(一般在20米以内,并要 求起、末点大致相等)架设全站仪,在水准 点上架设棱镜杆(起、末点为同一根杆,长 度不变),进行距离和高度角观测。 • 低棱镜两测回,高棱镜两测回。 • 观测时各站上要在观测前测定温度和气压, 在全站仪上设置,以便对边长进行改正。
观 测
观 测
观 测
大瑶山三角高程观测路线
精密三角高程测量的发展
随着全站仪的发展,国内外广泛开展了 EDM
三角高程测量的研究,并取得很大的进展。这 些研究表明,三角高程测量可以代替四等水准 测量,也有的认为边 EDM 三角高程测量已接 近或已达到二等水准测量要求,也有的认为 EDM 三角高程测量可以达到更高的精度。
短距离单向三角高程计算公式
大瑶山三角高程观测路线
大瑶山三角高程观测路线
对向观测方法
• 按仪器前进方向,先进行后测站观测,再 进行前测站观测。每个测段进行单棱镜往 返测或高低双棱镜观测,高低双棱镜观测 顺序为:后低,前低,前高,后高。支线 测段进行单棱镜往返测。一条边观测结束 后,进行下条边观测,这时特别要注意, 前站仪器不动,为下条边的后站,原后仪 器迁至前面,为下条边的前站,在一个测 段上对向观测的边为偶数条边。
全站仪三角高程测量与四等水准测量的精度比较分析
全站仪三角高程测量与四等水准测量的精度比较分析作者:王继辉来源:《城市建设理论研究》2013年第16期摘要:根据全站仪三角高程测量的原理和方法,对一条附合水准路线分别进行全站仪三角高程测量和水准仪四等水准测量,应用误差传播定律对两者的测量精度进行了对比分析。
结果表明,全站仪的测量精度略高于水准仪的测量精度,且使用较方便,受地形限制小,作业效率高,全站仪三角高程测量可以代替四等水准测量。
关键词:全站仪三角高程测量;四等水准测量;误差分析中图分类号:P2 文献标识码:A 文章编号:引言随着测绘技术的发展,全站仪已广泛应用于控制测量、地形测量及工程测量中。
但是由于全站仪在测设竖直角时盘左和盘右的偏差较大且不稳定,全站仪三角高程测量能否代替水准测量,很多学者有不同的看法。
因此,本文根据全站仪三角高程测量的原理和方法,在平原微丘区的地形上,拟对一条附合水准路线分别进行全站仪三角高程测量和水准仪四等水准测量,应用误差传播定律对两者的测量精度进行比较分析,以确定两种测量方法的优劣。
1、工程概况本研究中主要对从大连市地铁D级GPS控制点DK027至控制点B2间的测点,分别进行全站仪三角高程测量与四等水准测量,并进行实测高程精度比较分析。
已知控制点DK027,B2的高程分别为66.788m和67.519m,测量长度约1.4km,附合水准路线走向图如图1所示。
全站仪采用PENTAXR-325N型,由江西南昌宾得全站仪生产供应商提供;水准仪采用科力达NL30A型,由南方测绘仪器有限公司生产。
在测量前均对仪器进行了校正,仪器精度均满足要求。
在天气晴好的情况下,先用全站仪进行测量,利用三角高程对向观测方法,仪器架设6站,完成了附合水准路线的测量;再用水准仪进行测量,按照四等水准双面尺法观测方法,仪器架设9站,完成测量。
图1附合水准路线走向图2、全站仪三角高程测量2.1三角高程测量原理如图2所示,设A,B为地面上高度不同的2点,已知A点的高程HA,只要知道A点对B 点的高差HAB,即可由HB=HA+HAB得到B点的高程HB。
井下三角高程代替水准测量的可行性
的高度 角 和两点 间 的斜距 , 运用 三角公 式 计算 两点
间的高 差 , 面上 进行 三角 高程 测量 因受 到大气 折 地 光 和地球 曲率[ 的影响 , 2 ] 国内外学者 对 这方 面影 响 也 作 了很多 研究 , 并论 证 了精密 三角高 程测 量 可 以 代 替一 、 二等 水准 观测 的可行 性[ ] 3。 在井 下 高程控 制测 量 中 , 由于井下 巷道 通风 和
如何 能够 在最 短 的 时间 内准 确 、 时 、 速 地 完 成 及 快 各项 测量 工作 , 尽可 能减 少测 量外业 工作 对 生产 的
影 响 和 测 量 人 员 的 劳 动 强 度 , 具 有 现 实 意 义 是
的 。
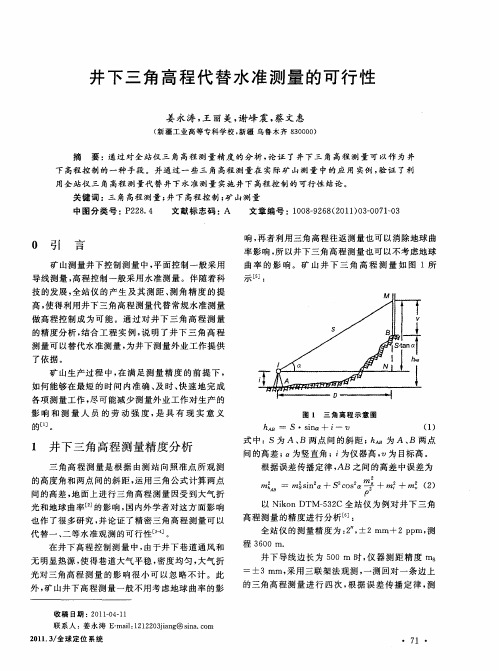
图 l 三 角 鬲 程 示 意 图
. 一 S ・sn 1 l 舳 ia十 i 一
表 1 平 巷 三 角 高 程精 度表 / m a r
( 。) l 2
3 4
由以上 分 析 可 知 , 用 测 量 精 度 2 , 2mm 利 ”±
十2p m 的全站 仪实施 井下 导线 控制 , p 进行 的三角
高程 测 量精度 完 全 可 以满 足 井 下 四等 水 准 测量 的
里 高差 限差 ±1 0mm.
斜 巷三角 高程 误差 每公 里高差 中误差 最 大为
/ l一 i TI= / , — — ± i ( 一十 0 L U mm ) , √8 k ( ) , 4
据 误差 传播 定律 , 角精 度可看 作 ±1。 测 ” 在井 下量测 仪器 高 和觇标 高时 , 通过 采 用经过
下 高程 控制 的一 种手段 。并通过 一 些三 角 高程 测 量在 实 际矿 山测 量 中的应 用 实例 , 证 了利 验
三角高程测量代替四等水准测量在实际工程中的应用

三角高程测量代替四等水准测量在实际工程中的应用1. 引言1.1 概述在日常工程实践中,四等水准测量存在着诸多不足之处,如测量时间长、费用高、精度较低等。
而三角高程测量通过利用现代化的测量设备和技术手段,能够在较短的时间内获取更精准的高程数据,从而大大提高了工程测量的效率和准确度。
越来越多的工程测量项目选择采用三角高程测量方法进行测量。
通过实际工程案例的探讨,我们将进一步了解到三角高程测量在各种工程领域的应用情况。
本文还将介绍三角高程测量的具体步骤和需要注意的问题,以帮助工程测量人员更好地掌握这一先进测量技术。
本文将全面分析三角高程测量代替四等水准测量的优势和应用案例,为工程测量领域的发展提供新的思路和方法。
1.2 目的本文旨在探讨三角高程测量如何代替传统的四等水准测量在实际工程中的应用情况。
通过对比四等水准测量的不足和三角高程测量的优势,分析其在工程测量中的实际应用案例,并详细介绍三角高程测量的步骤和需要注意的问题,从而全面展示三角高程测量在现代工程测量中的重要性和优势。
2. 正文2.1 四等水准测量的不足四等水准测量需要较好的天气条件进行测量,一旦遇到恶劣的天气,如大雨、大雾等,会严重影响测量结果的准确性,造成数据不稳定。
在一些需要测量跨越河流或湖泊等水体的工程中,四等水准测量存在困难,需要额外的设备或措施。
四等水准测量在实际工程中存在着诸多不足,因此需要寻求更加高效、便捷的测量方法来应对复杂多变的工程环境。
2.2 三角高程测量的优势三角高程测量相较于四等水准测量具有许多优势。
三角高程测量可以大大减少测量时间和成本。
在四等水准测量中,需要沿着一条直线布设多个测站,而且每个测站之间的距离通常较长,相比之下,三角高程测量在地形较复杂的情况下可以更快速地完成测量工作。
三角高程测量可以实现长距离的高程测量。
由于四等水准测量受到地形的限制,无法跨越大范围的地形起伏,而三角高程测量则可以通过多个三角形的建立,实现长距离的高程测量,使得测量的范围更广,更适合于大型工程项目的测量需求。
矿区采用全站仪高程导线代替三、四等水准方法的探讨

精度达到三、 四等水准测量的精度。
高程测 量就 是 测 定 点 与 点之 间 的高 差 , 而 由 已知 从
高程 点求得 另一 点 的高 程 。高程 导 线就 是 根据 三 角 高程
测量 原理测 定 的 , 它采 用 导 线 的 形 式联 测 所 求 各 点 的高 程, 其特 点 是不 需要 测定 点 的平 面位 置 , 般 采用 附合 或 一 闭合 导线 的形 式 。
式 中 :, sn为观 测 的斜 距 和垂 直 角 ( ; ,。 经 纬 仪 高 m) i 为
和觇板高( ) , 为测距仪高和棱镜高( ; m ; m) 如果使用
全 站仪 观测 , i=: 则 。 i 。
2 三角 高 程 测 量 的 误 差
影 响三 角高程 测量精 度 的误 差 主要有 四项 。
pes n 1 r o ne.
Ke r s mi i g a e y wo d : nn ra;t g n merc lv l g e me r e e ig r o o t e ei ;g o t c lv l i i n i n
O 引 言
矿 区的控 制网在 煤矿 的建设 和 施 工 中起 着 十分 重要
地球 曲率对 高差 的影 响 ; 为大气 折光 对高 差 的影 响 。 当测距 仪的 光 轴 与观 测 垂 直 角 视 线 不 平 行 时 , 将 要
所 测斜距 归算 到垂 直角方 向上 。归算 公式 为 :
S =S+sn0 i e= ( 1一 )一(。一 2 2 i ) () 3 () 4
或
n2
A =D ×t H g。
i 一 一
() 2
பைடு நூலகம்
的作用 , 为 平 面 控 制 网 和 高程 控制 网 。高程 控制 网 它分
三角高程测量代替三、四等水准测量研究
综上述 , 全站仪类水准三 角高程测量方法在一定条件 下 可 以代 替水准仪进行三 、四等 水准测量 , 方便快捷 的完 成工
程任务 。
点和 待测高程点上的 固定 高度 的棱 镜通 视; ( )先用仪 器照准待测点 ( 2 盘左盘 右观测 ) ,测出平距
和垂直角 ,计算 出水 平视线高程值 ; ( )用 同样 的方 法照准 已知高程 点 ( 3 盘左盘右观测 ) , 测出平距和垂直角 ; ( )代人公式 ( )中,计算 待测 点的高程 。 4 6
( )垂直角观测误差 ; 2 ( )大 气 折 光 误 差 ; 3
第 3期
首先, 我们 用全 站仪 瞄准 B点 , 观测 B点的垂 直角 。采 ( 取 盘左盘右取平均值 ) ,则全站仪水平视线 高程 为 :
H{ 爿_ ^一 a o = B + Dt t n ̄
() 3
( )仪器高和棱镜高 的量 高误差 。 4 从全站仪类水准三角 高程测量 的方法分析可知 , 长误 边 差 、垂直角 观测误 差影响近视相等 。大气折光误差 ,当两 点 之 间的距 离越远 , 误差越大 。 站仪类水准三角高程测量 则 全 是将全 站仪安置与两个点之 间, 分别进 行瞄准 , 使大气 折光 误差 的视线距离缩短 ,提高 了测测精度 。
[ 内容提要] 讨论当前精密工程测量现状 ,针对工程单位实用仪器情况 ,从三角高程测量原理入手 ,得出全 站仪类水准三 角高程 测量新方法 ,分析误差 ,实践检验全站仪类水准三 角高程测量新 方法代替 水准 仪进 行三 四等
水准测量可 行性。
[ 关键词] 全站仪;类水准 ;三角高程测量 [ 中图分类号] T 2 B2 [ 文献标 识码] A [ 文章编 号] 10 .4 7 (0 2 30 5 .2 0 87 2 2 1 )0 .1 90
全站仪三角高程测量与四等水准测量的精度比较分析
关键 词 :全站 仪 三角 高程测量 ;四等 水准测 量 ;误 差分析 中图分类号: U1 8. T 9+ 5 文献标志码 : A 文章编号 : 6 39 3(0 1 3 0 8 -4 17 -lr src e y t p g a h n g r fi in y S h rgo a eg tm e s r m e t a e l c o rg a e m l e t td b o o r p y a dhih wo k e fc e c , O t eti n lh i h a u e i n n r p a e f u - r d — c lv ln e s r me t e ei gm a ue n .
.
Ke wo d :tio a eg t a u e n fttl tto ; f u t —r d — v ln e s r me t er ra ay i y r s rg n l i h h me s r me t a a i n o rh g a e l ei gm a ue n ; ro l ss o o s e n
s r sal n e e lv ln n s e tv l ym e d f rg na eg t e s r me ta df u - r d —e ei gme s r m e t u e la n x d e igl er p c eyb a so ti o l ih au e n n o rg a e lv ln a u e n , e i e i h m
Ta egi g h ag a,C o U n i F n l n ,Z uF n ci a u n a We
(ntue f e t hia E gneig Is t oe nc l n ier ,Hu a iesyo eh oo y h zo nn4 2 0 ,C ia) ito G c n nnUnvr t T c nlg ,Z uh u i f Hu a 10 8 hn
全站仪三角高程代替等级水准的应用研究
8—2 08
长春工程学院学报 ( 自然科 学 版 )2 1 年 第 1 卷 第 1 02 3 期
J Ch n c u n tTeh ( t S iEd. , 0 2 Vo. 3 No 1 . a g h nI s. c . Na. c. i) 2 1 , 11 , .
墨 墨
范 》 的要 求三 等水 准测 量要 求每 千米 的全 中误 差 上
为 6mm[ , 得 三等 水 准 单 向测量 偶 然 中误 差 为 6 可 ]
仪 有 明显的优 势 , 以在 精度 要 求 不 高 的 山 区测 量 所 时 , 以考 虑使用全 站仪来 代替水 准仪 , 可 但是 要用 全 站仪 三角高程来 普 遍 代替 水 准 仪 来进 行 高 程 测 量 ,
目前还 无法 达到理 想的精 度 。
m永一土3 2 - 由此 可知 , L一 02 ( k √ × ̄ E, 当 . 时 L以 m
为单 位 ) m永 =± 1 9 , . 0mm, 故
行性。
S, 竖直 角为 和 口 , 镜高为 和 Z , 棱 假定 仪器 在
C点高 程为 H 则 A 点 的高程 为 H 和 Hs2。 , B [ 3
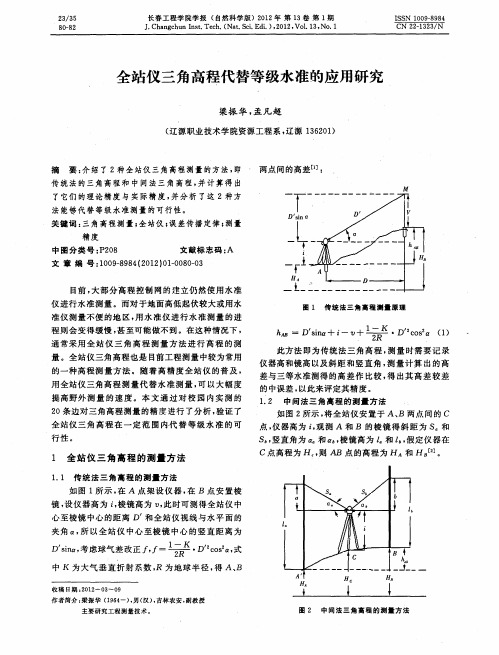
1 全 站 仪 三 角 高 程 的 测量 方 法
1 1 传统 法三 角高 程的测量 方 法 . 如 图 1所示 , A 点架 设 仪 器 , B 点安 置 棱 在 在 镜, 设仪 器高 为 i棱镜高 为 , , 此时 可测 得全 站仪 中
准 的成 果作 比较 分 析 , 而得 出三 角高 程 测量 的实 从 际精 度 。
测点 , 样就会 在一定 程度 上降低 测 量速 度 , 这 并且 在 测量 时需要量 取仪 器高 与棱镜 高 , 加 了误 差来 源 , 增
全站仪三角高程测量替代水准仪观测桥梁预压沉降量

行性 。
则: 高程 H b = H a+ H a b , 式中 H a b = a— b , 故H b = H a
+( a一6 ) 。
图 1 水 准测 量计算 示意 图
Fi g. 1 Le v e l i ng me a s ur e me nt c a l c u l a t i on
1 常 用 的 高 程 测 量 原 理
用全 站仪进 行 高程 测量 的方法 有 单 向观 测 和对 向观 测, 下 面给 出其原 理和计 算公 式 。
1 . 2 常 规 三 角 高程 测 量 计 算 表 达 式
如 图 2所示 , 假 定 A, 曰为两 个不 同高程 的地面 点 , 已 知 A点 高点 为 H a , 欲求 l i b点 的高程 , 即求 出 A点 到 点
Al t e r n a t i v e Me t h o d o f Tr i g o n o me t r i c Le v e l i n g M e a s u r e me n t o f To t a l
S t a t i o n t o Le v e l i n g f o r Br i d g e Pr e・ - ・ Lo a d i n g S e t t l e me n t Ob s e r v a t i o n
1 . 1 水 准 测 量 计 算 表 达 式
水 准测量 又 叫做 几 何 水 准 测 量 , 是 测 量 高 程 定 m 的高 程 , 可 把全 站 仪架 设 在 A点上 , 量 取仪 器 高 i , B点架 设棱 镜 , 量 取冷 静 高 t , 观 测 竖直 角@ , 已知 A, 曰两点 的水 平距 离为 , 则: 高差 H a b
浅谈全站仪三角高程测量代替四等水准测量
浅谈全站仪三角高程测量代替四等水准测量一、概述:高山地区高差大,进行几何水准测量效率低,因普通水准仪尺只有3m,进行水准测量则视距短、转站多,而转站多精度下降,如果水准尺上的圆水准气泡有误差对水准测量精度影响很大(水准尺出厂时自带的圆水准气泡一般不准,受运输振动影响大)。
如果水准尺圆水准气泡不准,高山地区水准测量容易超限。
水准尺不竖直对水准测量结果影响以下有分析。
如果采用全站仪三角高程测量代替四等水准测量提高作业效率,但是影响三角高程测量精度因素比常规水准测量多,除了全站仪竖盘指标差外(相当于水准仪的i角误差)还有球差与气差(高差大,空气密度不同引起折射),怎样减少这些因素对三角高程测量精度影响使用三角高程测量达到等级水准的精度要求。
以下通过盐什公路高差最大段k9+600~k11+800的实测数据分析。
二、高山地区几何水准测量的局限性:高山地区几何水准测量特点是高差大、视距短、转站多。
上山测量时后视尺倾斜对测量累积差大使测量后视读数增大,前尺视线靠地表受地表折光影响大;下山测量时前尺倾斜累积差大使测量前视读数增大,后尺视线靠地表受地表折光影响大。
通过以上分析高山地区水准测量如果水准尺倾斜使山顶水准点高程偏高;高山地区转站多也会使测量累积差大,精度低下平原地区的水准测量;高山地区水准测量转站多使测量速度慢、作业效率低;在陡峭的悬崖地区几何水准不可能进行。
我们于2015年4月份对盐什公路k9+600~k11+800隧道进口到出口进行一次水准点联测,按照国家四等水准测量的要求进行,四等水准联测结果如下:从上表中可看往返测误差大,水准线总长共2.2km,测量60站。
进行往返测量用了2天时间。
且测量精度也不高,测量成果刚达到限差要求(±6√n(mm))。
其中D21在山顶,这点的精度最低,往返测差38.5mm。
这种误差主要在于水准尺倾斜影响,一般水准尺自带的气泡受运输振动影响产生误差,且水准尺气泡难以校正。
全站仪代替四等水准仪测量

全站仪代替四等水准仪测量摘要:当面对崎岖的山路,或者复杂的地形条件时,很难通过普通的设备以及手法实施水平测量,而为了追求测量效果的良好,能够以全站仪三角高程测量充当水准仪进行四等水准测量的替代品,加以偏差的消除。
如此一来,地理的因素将不再约束测量的效果,这一手法表现出偏差范围小,精密水平突出还有效率高等优势,能够可靠地替换四等水准测量,同时,大量的应用实践证实了这一设备的优越功能。
关键词:四等水准;全站仪;误差;测量1 前言通过实践能够明显看出,全站仪三角高程能够实现四等水准测量具备的精准水平,但是目前在多种测量规范中,均要求全站仪三角高程测量在替换四等水准手法的过程里,各站点需要具备超过两个测回,同时属于往返测,而涉及到的全站仪等仪器均需要投设于控制点位置,诸如此类的全部操作旨在保障三角高程测量与水准高程手法实现的精准能力保持一致。
然而这个过程暴露出庞大的工作量以及繁杂的流程,一旦工程落实地点设置于地形崎岖的山区,就不可能落实任务,有时候这一替换还会起到画蛇添足的效果。
2 现实原因在具体施工中,诸如目标修建一条新的公路时,由于所处的地点为山区或者低山丘陵聚集的地区等,路面起伏不定给施工带来了棘手的问题,与此同时,南方雨水丰富而且水田贯穿施工范围,植被繁茂,这些地貌特征都是进行以往水准测量的阻碍。
由于设备庞大易损坏,精度缺乏保障,最后导致工作落实进度缓慢。
经过多方实践,总结得到全站仪替换水准仪进行测量的一系列手法。
3 可行性s3.1 全站仪简介全站仪的构造决定其要更加先进,在精准水平、保护效果还有多种性能上优于以往的水准仪。
其中,全站仪具备的自动双轴补偿系统是基于以往水准仪的问题加以改进而形成的。
以往水准仪设置的塔尺不具备准符合气泡,突出表现为倾斜误差显著。
除此以外,全站仪属于电子产品的范畴,无需人力的观测,直接消灭了主观因素带来的误差。
3.2 误差分析三角高程涉及的误差包括:仪高、棱镜高量误差,照准误差、斜距测量误差还有大气折光等。
全站仪三角高程视线高代替几何水准精度分析及应用
的有 竖 直 角 观 测 中误 差 、 距 观 测 中 测
误差 m 、 仪器高 m 和棱镜高 m i 大气折光和地球 曲 目前测量仪器较常用 2全 站仪 , ” 其测距精度一
般 为 3m + m 2×1 ~。取 规范 中规 定 s 70m,L 0 = 0 O=
S ra . 8 e ilNo 51
现
代
矿
业
J n .2 1 ue 02
M ORDEN I NG M NI
总 第 58 1 期 2 1年 6月 第 6期 02
全 站仪 三角 高程 视 线 高 代 替 几何 水 准精度 分析 及应 用
李金 池
( 马钢 ( 团 ) 司桃 冲矿 业 公 司 ) ( 集 公 )
劳动强度大 、 工作效率 较低 。到了上世纪末期全站 仪出现并普及 , 为三角高程测量代 替部分几何水准 测量提供 了可能。全站仪集 电子经纬仪、 电测距 光 仪和数据记录传输 于一体 , 其测距 和测角精度大大
提 高 , 它进 行高程 测 量 , 测 速度快 、 作效 率 高 。 用 观 工 全站仪进行 三角高程 测量时有单 向观 测 、 向观 对 测、 中间观测等 方法 , 分别 可 以满 足 不 同工 程 测量 的 高程精度 需要 。而冶金 测量规 范对此 方 面规定很 少 , 要合理运 用规 程对 全 站仪 进行 开 发利 用 。就 冶金 矿 山而言 , 根据 采 矿生 产具 体 要 求 , 开 拓 、 准 、 应 按 采 回 采工程所 规定 限差 , 过 误差 预 计 和施 测 方案 比较 , 通 采用最经 济 、 最高效且符 合生产 需要 的施 测方案 。
D +
图 1 三角高程原理
全站仪三角高程代替四等水准在水利水电工程中的应用

348全站仪三角高程代替四等水准在水利水电工程中的应用The Application of Total Station Triangle Elevation Replaces the Fourth Level in Water Resources and Hydropower Engineering■ 颜旭贤 吴自金 张继宇 ■ Yan Xuxian Wu Zijin Zhang Jiyu[摘 要] 在水利水电工程测量中,很多时候需要使用三角高程测距代替水准测量。
本文从三角高程基本原理和误差来源出发,讨论了三角高程测量应进行的误差改正和注意事项,论述了全站仪三角高程测量在水利水电测量工程中代替四等水准的可靠性。
[关键词] 水利水电 三角高程 水准测量[Abstract] In the water conservancy and hydropower engine- eering survey, most of the time people need to use trigo- nometric elevation range instead of leveling. This article embarks from the basic principle of triangular elevation and error sources and discusses the trigonometric leveling error correction and announcements, and discusses the reliability of triangle elevation surveying instead of the fourth level in the water resources and hydroelectric power measurement project.[Keywords] water conservancy and hydropower, triangle ele- vation, leveling西藏错那县娘江曲流域规划测量工程测区位于藏南山原湖盆谷地中的喜马拉雅山区,气候属于喜马拉雅山南麓亚热带山地半湿润、湿润气候区,气候特点是降水多、气候湿润,日照时间短,旱雨季不分明。
全站仪三角高程代替四等水准测量的可行性分析
全站仪三角高程代替四等水准测量的可行性分析作者:喻方建来源:《中国科技纵横》2013年第13期·【摘要】根据全站仪三角高程测量原理,把全站仪视为水准仪测定两点间的高差,不用量取仪器高、棱镜高,经过精度分析和实践运用,可以代替四等水准测量。
【关键词】三角高程测量一测站水准多测站水准1 引言随着高速公路、铁路事业的蓬勃发展,需要进行大量的水准复测工作,全站仪代替水准测量是广大测量工作者备所关心的问题。
由于水准仪自身的局限性,适用于平坦地区,在地形条件复杂地区做水准复测,测站数增多,不仅工作速度慢,而且精度也难满足施工要求。
而全站仪操作简便快捷、误差小、精度高等优点逐渐取代水准测量工作。
2 全站仪三角高程测量原理如图1所示,A为已知点,B为待测高程点,将全站仪整平、对中于已知点A,并量取仪器高i;将棱镜置于待测点B上,量取的棱镜高为l。
则AB两点间的高差为(1)(2)(3)式中:S为斜距;a为竖直角;c为地球曲率改正值;r为大气折光改正值;K为大气折光系数;R为地球半径(取6371km)。
将(2)式、(3)式代入(1)式可得高差计算公式(4)3 全站仪代替水准测量方法3.1 一测站水准测量如图2所示,将全站仪置于AB两点的中间,已知A点的标高为Ha,求待测点B的标高Hb。
设仪器高为i,棱镜高分别为La、Lb。
将仪器置于AB的中间可不用考虑地球曲率影响,同时在同一时间内可不用考虑大气折光的影响,则可得如下表达式(5)若:、(6)若前、后视棱镜高相等,即:则(7)3.2 多测站水准测量如图3所式,AB是一条水准复测的符合路线,同时要在其间加密部分水准点以满足施工放样的要求。
由(6)式可得如下表达式第一测站高差(8)第二测站高差(9)第三测站高差(10)……………………………(1)当测站为偶数站时,由(8)式和(9)式可得(11)(2)当测站为奇数站时,由(8)、(9)式和(10)式可得(12)4 精度分析4.1 三角高程测量高差的中误差根据误差传播定律,由(4)式可得(13)4.2 两点间高差的中误差根据误差传播定律,由(5)和(7)式可得(14)假设(15)根据全站仪测量精度,ma=2″,ms=±(3+2*10-6S)mm为例子,对不同的测距和不同的竖直角,计算出一系列每千米观测高差中误差mh,以mh为纵坐标,s为横坐标,可得mk的误差曲线图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全站仪三角高程代替三\四等水准测量可行性研究摘要:高程测量在地形图测绘、工程土方量计算、沉降观测、点位测设、井下掘进、巷道贯通、水准网布设等各种测量领域有着广泛的应用。
传统的水准测量是我们在一般情况下普遍采用的高程测量方法。
但是在一些特殊环境下,例如在地形起伏较大的丘陵地区、或者是仅仅使用全站仪测图的时候,如果依然使用传统的水准测量方法来测量高程就有诸多不便,这就需要应用一种新的高程测量方法。
在高程测量过程中,传统的高程测量方法是水准测量、三角高程测量和gps高程测量,这些种方法虽然各有特色,但都存在着不足。
关键词:水准测量;三角高程测量;gps高程测量全站仪目前是一种广泛应用于测绘生产一线的测量仪器,有着很多的优点,测量人员对全站仪的操作也很熟悉。
全站仪集测距、测角、测高程于一体,其测距和测角精度大大提高,使得全站仪在工程测量中的作。
用越来越重要目前,随着全站仪测量精度的不断发展,测角、测距的精度以及自动补偿的精度,都得到很大提高。
尽管全站仪测距精度很高,但仪器高和目标高即使用钢尺按斜量法或平量法获得,其精度约为±2~±3 mm,仪器高和目标高的量取误差是不容忽视的,而且它们是固定误差,距离越短,其对全站仪高程测量和测设的影响越显著。
不管使用什么仪器,要准确量取仪器中心到测站中心之间的高度是困难的,因此,通过量取仪器高的精度来提高高差测量精度是不现实的。
在这种背景下,全站仪中间点设站高程测量就在这种背景下产生并得到了广泛的应用。
所谓中间点设站就是在待测两点中间安置全站仪(保持前后棱镜高度基本一致),依照三角高程的原理分别观测前后觇标的垂距,以此来求解两待测点间的高差。
这种方法相比于传统的三角高程测量简化了操作步骤,提高了观测精度。
全站仪中间点设站法与常规的三角高程或水准测量相比有以下优点:1)不量仪器高,不量觇标高,不进行对中、不读竖直角与斜距,直接读取垂距。
简化了作业流程,提高了工作效率,减少了误差来源,提高了精度。
2)在两点间设站,相比于传统的三角高程测量减少了设站次数。
同时保持前后视距相等,减小了大气折光的影响,消除了地球曲率对高差的影响。
3)棱镜标杆高可以调节,因此视线离地面保持了一定的高度,从而可以减少不同折光的影响,另外立棱镜也比立水准尺更容易,减少劳动强度。
4)在丘陵地区,基本上不受地形起伏的影响。
相比于同等级的水准测量,可以大幅度的提高视距。
另外立棱镜也比立水准尺更容易,减少劳动强度,可以显著的提高测量速度。
5)可以迅速较精确测定水准测量难以解决的高程测量问题,例如突然出现超过3米以上的高差。
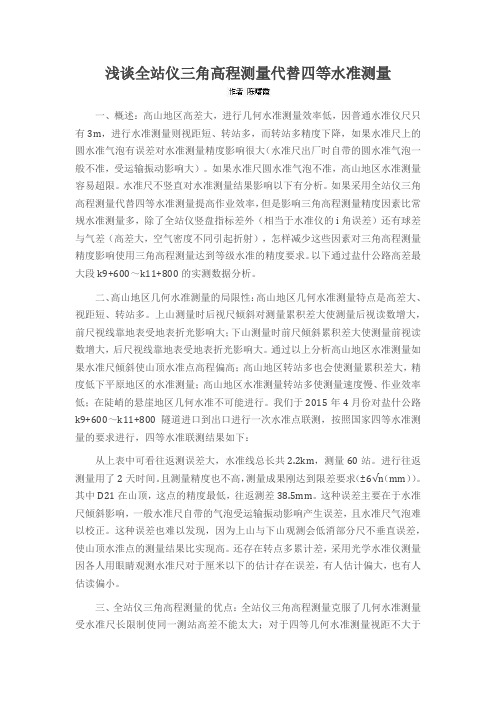
1全站仪中间法三角高程测量原理全站仪中间法三角高程测量原理见图1-1[6],图1-1中为仪器架设点,a为后视点,占为前视点,i为仪器高,a1为后视竖直角,s1为后视距离,va为后视目标高,a2为前视竖直角,s2为前视距离,vb为前视目标高,hab为ab两点的高差。
,分别为o、a两点的高差,o、b两点的高差,可得:(1-1)据(1-1)可得a、b两点间的高差为:(1-2)图1-1全站仪中间点设站三角高程原2全站仪三角高程测量误差分析2.1觇标高对高差的影响值从高差计算公式可知,测站仪器高的量取精度对高差值没有影响,同理,当前后视棱镜高度一致时也对高差没有影响。
但在实际应用中,前后棱镜的高差不可能完全的保持高度一致。
为减少或抵消其影响,我们采用了以下方法:连续设站观测时,保持本测站的前视觇标高与下一个测站的后视觇标高一致。
这样在计算高差公式中只留下第1站后视(起点)与末站前视(终点)点的觇标高,如果能保持起点与终点的觇标高一致,则公式中觇标高的量取精度对高差的影响就会抵消。
此时应注意保持观测站数为偶数,否则不能抵消转点觇标高的影响。
在本实验中由于一些待测水准点之间距离过小,一测站就能完成测量,同时若要获得每测站准确的高差,那么就需要对两支棱镜的高度进行精确的调节,我们采用了下面的方法:首先使用全站仪照准一只棱镜,采用中丝法瞄准棱镜中心,制动水平度盘与竖直度盘。
然后在同一点立第二支棱镜,通过观测全站仪望远镜中的十字丝与这只棱镜中心的差来精确调整棱镜的高度,这样就可以最大限度地较精确的保证两只棱镜等高,以抵消其影响。
从上述讨论可知,若采取上述措施,那么觇标高对测量误差对高差的影响可以抵消,在进行精读预计的时候将不再考虑。
2.2地球曲率和大气折光对高差的影响值地球曲率与大气折光是影响水准观测与三角高程观测的一项重要的误差来源,虽然在短距离内其影响微乎其微,但在长距离的水准线路测量时,这两项误差来源将会产生较大的系统性误差。
所以必须对这两项误差来源进行分析,并采取一定的措施,解决问题。
地球曲率与大气折光对高差的影响值与平距d的平方成正比,所以,在前后视距相等的情况下,地球曲率对前后视高差观测值的影响相同,那么若保持前后视距相等就可以消除地球曲率对高差测量值的影响。
所以,保持每测站前后视距差与累计视距差的差值可以有效消除此项误差。
大气折光对高差的影响较为复杂,不同地区、不同时间内的大气折光系数也会发送变化[11],但若能保持前、后视距相等,可以基本消除大气折光对高差的影响值。
即一测站前后视观测时,前后视的大气折光系数k值相等。
那么也可以消除大气折光对高差的影响。
根据气球差改正式:(2-1)在不同视距,不同视距差的情况下,这两项改正对高差观测值的影响大小,式中k值取均值0.15。
视距越短,前、后视距的差值可以放宽,特别当小于200m时,前、后视距差可以达到30m,这时大气折光对高差影响值还不到1mm,这在实际测量中是容易做到的。
这对于一测站是适用的,同样对于整个水准路线也是适用的,当我们控制了视距差,累积视距差时,就会有效地消除这两项误差。
当前、后距离相距较远时,可适当增加测站以减少前视距离及后视距离。
所以若要使用该方法来代替较高等级的水准测量时,完全可以通过在观测时控制前后视距、前后视距差、累计视距差,这样就可以有效地消除与减小大气折光对高差观测值的影响。
就能够准确的获得每测站的高差值;更能够准确地获得整个高程线路的高差值。
图2-1. 地球曲率与大气折光影响三角高程测量原理2.3测距、测角误差对高差的影响这两项误差是影响最终高差精度的关键性误差,全站仪中间设站法的关键就在于如何保证全站仪测距与测垂直角的精度与可靠性。
能否有效地提高全站仪测距与测垂直角精度直接关系到最终高差成果的精度。
影响全站仪测距与测垂直角误差来源[3]有很多方面:1)由仪器竖盘指标差引起的垂直角读数误差,可以采取正倒镜观测的测量方法来消除此项误差2)由仪器倾斜所引起的垂直角误差:目前全站仪都有自动补偿装置,既能够自动修正由全站仪不同轴系之间的不垂直,或者仪器竖轴倾斜所带来的读数误差。
目前即使是较落后的单轴补偿的全站仪在理论上也能够有效的补偿由于仪器竖直轴倾斜所带来的竖直角读数误差。
需要注意的是要能够确保全站仪补偿器能够正确地补偿竖直角误差。
3)由棱镜晃动所引起的测角误差:由于棱镜的晃动还会造成每次全站仪照准目标的位置发生变化,这就造成了测角误差(当棱镜在视线方向前后晃动会造成测距误差)。
所以可以采用一些措施,比如使用两支支架来支撑棱镜,以保证棱镜圆水准气泡的稳定,这样就能够确保每次照准都能够精确的准确的瞄准同一位置。
这样做既能保证气泡的稳定,又与使用三脚架相比更加简便。
这样就能基本消除由于棱镜晃动所引起的测距与测垂直角误差。
4)由于照准所引起的误差:采用中丝法可以提高照准精度。
如果测站与测点间距离太远,操作人员就不能精确瞄准棱镜十字丝中心,距离太近由于目标过大也容易造成照准误差,这就造成了竖直角测量误差,所以测距最好控制在50 ~250m以内。
这样就能够有效地控制照准不准确所带来的垂直角误差。
3精度预计3.1水准测量精度水准测量时一种十分成熟可靠的高程测量方法,其测量精度在只考虑仪器置平误差,瞄准误差、读数误差这三项误差因素下,三、四等水准测量一测站的高差测量精度为[1]:(3-1)根据等级水准测量对视距长度的要求,不同视距时一个测站高差精度如表3-1[9所示:表3-1水准仪三(四)等水准测量一个测站内高差精度根据计算可知,为保证全站仪中间设站法高程测量能够代替相应等级的水准测量,当竖直角不超过30°时,视距不超过300m时,可以代替三等水准测量。
3.2中间设站法精度预计由于前后觇标高相等,并且忽略了大气折光与地球曲率的影响,则有:(3-3)根据误差传播定律,a、b两点的高差中误差为[2]:(3-4)各级水准的精度要求如下:工程图根水准:;四等水准:;三等水准:;目前各种品牌的全站仪的测距精度基本上都达到了2+2ppm的水平。
各种全站仪的测角精度一般分为2″与5″两种精度。
(3-4)中各项参数的取值:由于在测量时,仪器高于觇标高度大致相同,故取竖直角均值;在工程测量的平面控制测量中,导线边长一般要求在200米以内,取s=200m。
下面,在这些规定条件下,我们来讨论不同精度的全站仪在这种方法时所能达到的精度:1)当使用仪器标称测角标称精度为5″,测距标称精度为2+2ppm 的全站仪时,考虑到每测站两测回故:则根据(3-4)可以推导出:2)当使用仪器标称测角标称精度为5″,测距标称精度为2+2ppm 的全站仪时每测站一测回的观测方法时:则根据(3-4)可以推导出:3)当使仪器测角标称精度为2″,测距精度为2+2ppm的全站仪时,每测站测两测回时有:则根据(3-4)式可以推导出:根据不同标称精度的全站仪的精度预计,可得出:1)使用测角标称精度为2″,测距标称精度为2+2ppm的全站仪,每测站采用两测回时,在理论上每公里高差中误差为1.5mm,理论上可满足代替二等水准测量精度的要求。
2)使用测角标称精度为5″,测距标称精度为2+2ppm的全站仪,每测站采用两测回时,在理论上每公里高差中误差为3.8mm,理论上可满足代替三等水准测量精度的要求。
3)使用测角标称精度为5″,测距标称精度为2+2ppm的全站仪,每测站采用一测回时,在理论上每公里高差中误差为5.4mm,理论上可满足代替三等水准测量精度的要求。
4数据采集为了对上述理论分析进行实际验证,设计了如下测量方案:分别使用传统的水准测量方法与全站仪中间点设站三角高程法来测量同一水准网。
然后分别对着两种方法测得的高程数据进行平差。
以全站仪高程网的平差结果来分析全站仪中间设站法高程测量的精度;同时,为了保证该方法所测得数据的可靠性,以二等水准网的高程结果作为标准来检验全站仪高程网数据的可靠性。
本次试验场地为校园内,以校园实习基地为基础构建,测区地势较平坦,气象条件稳定,通视条件较好,地表基本为坚硬路面,车辆通行较少。