AGV车辆转向机构设计 2
自动导引小车AGV的结构设计及自主移动规划
自动导引小车AGV的结构设计及自主移动规划一、概述自动导引小车(AGV,Automated Guided Vehicle)是一种具备自主导航、定位、移动、避障以及作业执行等功能的智能移动设备。
在现代工业生产和物流领域,AGV以其高效、灵活、精确的特点,被广泛应用于物料搬运、仓储管理、生产线自动化等场景,有效提升了生产效率和物流管理水平。
AGV的结构设计是其实现自主移动和作业功能的基础。
一个典型的AGV通常由车身、驱动系统、导航系统、传感器系统、控制系统以及作业执行机构等部分组成。
车身是AGV的承载平台,驱动系统负责提供动力并实现移动,导航系统确保AGV能够按照预设路径或指令进行自主导航,传感器系统用于感知周围环境并实现避障,控制系统则负责协调各部分的工作,实现AGV的自主移动和作业执行。
自主移动规划是AGV实现高效、准确移动的关键。
AGV需要通过路径规划算法,根据任务需求、环境信息以及自身状态,规划出最优的移动路径。
同时,AGV还需要具备实时避障能力,能够在遇到障碍物时及时调整移动路径,确保安全、顺畅地完成作业任务。
对AGV的结构设计及自主移动规划进行研究,不仅有助于提升AGV的性能和稳定性,还有助于推动工业生产和物流领域的自动化、智能化发展。
本文将从AGV的结构设计和自主移动规划两个方面进行深入探讨,为AGV的研发和应用提供有益的参考和借鉴。
1. AGV的定义与功能自动导引小车(Automated Guided Vehicle,简称AGV)是一种装备有电磁或光学等自动导引装置,能够沿规定的路径自动行驶,具有安全保护以及各种移载功能的运输车。
AGV是现代物流系统中的一种高效、灵活、智能的运输设备,广泛应用于制造业、仓储业、港口、机场等领域。
运输功能:AGV能够根据系统指令,自动将物料或产品从起点运输到终点,完成物料的搬运工作。
AGV的载重能力可以根据实际需求进行选择,从几百公斤到几吨不等。
导航功能:AGV通过内置的导航系统,如激光导航、电磁导航、视觉导航等,实现精确的路径规划和跟踪。
AGV的驱动转向系统设计
驱 动 电 机 : 永 磁 无 刷 直 流 电 机 由 电 动 机 主 体 和 驱 动 器 组
触 摸屏 k +
成 ,是 一种 典 型 的机 电一 体 化 产 品 。 结 合 该 设 计 的 要 求选 择
的I , 0扩 展 模 块 。
触摸 屏 : 结合 A G V的设计要 求和成本的控 制 . 该 系统 选 择 了威 仑 ( WE I N V I E) T K 6 0 7 0 i H 这 一 款 彩 色 触摸 屏 . 其 电 阻触 摸 屏 可 以适 应 在 负载 的 工作 环境 中 , 不 怕 水和 油 污 。
与 驱 动 点 击 通 过 同步 带 链接 .光 电 编 码 器 轴 端 套 上 硅 胶 轮 紧 贴 在 同步 带 上 , 用 于 测量 A G V 的 距 离以 及 速 度 。 前 进 磁 导 传 感器、 后 退 磁 导 传 感 器 分 别装 在 A G V 前 端 和后 端 离地 面 2 C M
6 o J X3 o 0 K1 3 G1 2 / 6 01 0 5 — 2 4 3 0永 磁 直 流 行 星 减 速 电 机 . 电 机 直
按 钮卜 + 器 制
传 感 器卜 . .
图1
控
径6 0 am, r 出轴 直 径 1 2 am, r 轴长2 5 m m, 中心 出轴 , 电机 机 身 总 长度 1 8 5 m m, 行 星 减 速 电机 具 有 体 积 小 、 电机 消 耗 功 率 小 、 转 矩大、 使 用寿命 长 、 噪 音 低 等 特 点 。额 定 电压 2 4 V, 额 定 功 率
控制器 : 采 用 台达 ( D E L T A) D V P 1 6 S P 1 1 T 负责整 个 系统 的
AGV车辆转向机构设计 2

毕业设计手册
(工科专业)
学生姓名:马凯林
指导教师:王宏志
专业:机械设计制造及其自动化班级: 0842
吉林工程技术师范学院教务处制
毕业设计选题论证书
毕业设计任务书
题目: AGV车辆转向机构设计
机械工程系(分院)机自动化专业 0842 班
学生姓名:马凯琳学号: 31 指导教师:王宏志职称:讲师
教研室主任:王桂萍
系(分院)主任:周广文
任务书下发日期:2011年12月26日
吉林工程技术师范学院教务处制
本科生毕业设计开题报告
题目 AGV车辆转向机构设计
院(系)____ 机械工程学院_ 专业_ 机械设计制造及其自动化
班级______ 0842__________ _ 姓名_____ 马凯琳________ _ 指导教师____ 王宏志_______ __开题时间2012年3月27日
吉林工程技术师范学院教务处制
一、课题研究意义
二、研究方案
三、设计(论文)课题评议
四、考核组成员
毕业设计指导教师评阅意见
注:优(90分以上);良(80~89);中(70~79);及格(60~69);不及格(60以下)
毕业设计指导教师评定成绩标准
注:如属论文且无设计图纸则将第11项的得分加到第12项中
毕业设计评阅人评阅意见
注:1.参照评价项目内涵与标准,A为合格、B为基本合格、C为不合格;2.有1个C,需修改后答辩,有1个以上C不同意答辩。
毕业设计答辩记录
毕业设计答辩小组评语及综合成绩
注:优(90分以上);良(80~89);中(70~79);及格(60~69);不及格(60以下)
毕业设计答辩成绩评定标准。
AGV自动导引小车结构系统全设计
第二章 机械部分设计2.1 设计任务设计一台自动导引小车 AGV ,可以在水平面上按照预先设定的轨迹行驶。
本设计采用 AT89C51 单片机作为控制系统来控制小车的行驶,从而实现小车的 左、右转弯,直走,倒退,停止功能。
其设计参数如下:自动导引小车的长度: 500mm自动导引小车的宽度: 300mm 自动导引小车的行驶速度: 100mm/s2.2 确定机械传动方案 2.3 直流伺服电动机的选择伺服电动机的主要参数是功率 (KW) 。
但是,选择伺服电动机并不按功率, 而是更根据下列三个指标选择。
运动参数:AGV 行走的速度为 100mm/s ,则车轮的转速为电机的转速选择蜗轮 -蜗杆的减速比 i=62n 电 in 62 22.75 1410.5r min( 2-2)自动导引小车的受力分析:1000v n πd 1000 6 3.14 14022.75 r min2-1)图2-3 车轮受力简图小车车架自重为P P ρabhg 2.85 103 0.5 0.3 0.032 9.8 134N 2-3)小车的载荷为G G m g 35 9. 8 34N3 (2-4)取坐标系OXYZ 如图2-3 所示,列出平衡方程由于两前轮及两后轮关于Y 轴对称,则F A F B,F C F DF z 0 ,2F A 2F C PG 0 (2-5)M x 0 ,0.075G 0.17P 2 0.3 F C 0 ( 2-6)解得F A F B 157. 6N6 F C F D 80.84N两驱动后轮的受力情况如图2-4 所示:滚动摩阻力偶矩M f 的大小介于零与最大值之间,即0 M f M m a x ( 2-7 )M max δF N 0.006 157.66 0.946N m (2-8)其中δ滚动摩阻系数,查表5-2[2],δ=2~10,取δ=6mm牵引力 F 为 F M max 0.94613.5N (2-9)d 0.0721) 求换算到电机轴上的负荷力矩(TLF W?D ?1 9.8 L2 G 10002) 求换算到电机轴上的负荷惯性 ( J L )0.0000349 10.004766 0.000131 0.00006046220.000036189 kg m 2其中 J 1 为车轮的转动惯量; J 2 为蜗杆的转动惯量;J 3 为蜗轮的转动惯量; J 4 为蜗轮轴的转动惯量。
基于机器视觉的agv自动转向结构设计
基于机器视觉的agv自动转向结构
设计
基于机器视觉的AGV自动转向结构设计是指利用机器视觉技术,利用相机实时采集路径上标志物的位置信息,将其与预先定义好的路径点位进行比对,从而实现AGV可以自动转向的功能。
具体来说,AGV自动转向结构设计要求实现一套满足工作要求的机器视觉系统,包括:1、相机及图像处理系统:用于实时采集路径上标志物的位置信息,并将其与预先定义的路径点位进行比对;2、AGV控制系统:用于实现AGV的自动转向;3、传感器:用于监测AGV的行进状况,以及避免与障碍物之间的碰撞;4、电控单元:用于控制AGV电机的转速。
此外,在AGV自动转向结构设计中还需要考虑车辆的历史轨迹记录,以及路径上障碍物的检测和处理等问题。
AGV自动导引小车结构系统全设计

AGV自动导引小车结构系统全设计AGV(Automatic Guided Vehicle)自动导引小车是一种能够自主行驶、无人操控的物流设备。
它可以通过激光导航、超声波导航、视觉导航等技术实现路径规划和避障,主要用于仓库、工厂等场所的物料搬运和运输。
下面将对AGV自动导引小车的结构系统进行详细设计。
1.机械结构系统:AGV的机械结构系统主要包括底盘、车体、传动系统和导航系统。
底盘是AGV的支撑结构,可以选择钢材或铝合金材料制作,具有足够的强度和刚性。
车体是AGV的外壳,一般采用塑料材料制作,具有一定的防护性能。
传动系统包括驱动电机、减速器和轮子,用于提供动力和驱动AGV行驶。
导航系统包括激光导航、超声波导航或视觉导航等技术,用于实现路径规划和避障。
2.电气控制系统:AGV的电气控制系统主要包括电源系统、控制系统和通信系统。
电源系统提供电能给AGV的驱动电机和其他电子设备,一般采用锂电池或铅酸电池,具有较长的续航能力。
控制系统包括主控单元、传感器和执行器,用于控制AGV的行驶、定位和操作。
通信系统用于与上位机或其他AGV进行通信,可以选择有线通信或无线通信方式。
3.路径规划和避障系统:AGV的路径规划和避障系统是实现自主行驶的关键。
路径规划算法可以根据仓库或工厂的布局和需求,确定最优的行驶路径,提高运输效率。
避障系统通过激光雷达、超声波传感器、摄像头等设备,实时检测周围环境,避免与障碍物发生碰撞。
4.软件系统:AGV的软件系统主要包括导航软件、控制软件和监控软件。
导航软件通过激光导航、超声波导航或视觉导航等技术,实现路径规划和避障。
控制软件负责控制AGV的行驶、定位和操作,根据传感器的数据进行决策。
监控软件用于实时监控AGV的运行状态和位置,提供远程控制和管理。
基于磁导航的agv转弯和校偏算法研究与设计
基于磁导航的agv转弯和校偏算法研究与设计AGV(自动导引车)是一种智能化物流设备,广泛应用于仓储物流、生产制造等领域。
磁导航技术作为AGV的核心定位和导航方式之一,对于AGV的转弯和校偏算法设计至关重要。
本文将围绕基于磁导航的AGV转弯和校偏算法展开研究与设计,以分析其原理、探讨算法优化方法,并提供相应的指导意义。
首先,我们来了解基于磁导航的AGV的工作原理。
磁导航是通过在地面铺设特殊的磁导带,AGV通过感应磁导带产生的磁场信息,来确定自身的位置和方向。
当AGV行驶到转弯和校偏的地方时,需要进行特殊的算法设计来实现平稳的转弯和自动校偏。
对于AGV的转弯算法设计,最常见且简单的方法是使用PID控制算法。
PID控制算法通过测量AGV当前位置与目标位置之间的误差,并根据误差的大小来调整AGV的转弯角度。
其控制过程主要分为比例、积分和微分三个环节。
比例环节根据误差大小来计算输出量,积分环节用于消除比例环节的静态误差,微分环节用于预测误差的变化趋势,从而使得AGV能够平衡地完成转弯操作。
在设计转弯算法时,还需要考虑AGV的机械结构和动力系统。
如果AGV的转弯半径较大,设计一个简单的PID控制算法即可。
然而,对于转弯半径较小的AGV,还需要考虑非线性因素的影响,例如转向角度与速度之间的关系。
在这种情况下,可以采用模糊控制算法或者神经网络控制算法进行优化,以实现更精确和稳定的转弯操作。
对于AGV的校偏算法设计,主要考虑的是避免AGV在行驶过程中偏离磁导带导致定位错误。
一种常见的方法是使用偏离角度检测算法,通过测量AGV当前位置和磁导带之间的角度偏差,并通过调整AGV的转向角度来使其保持在磁导带上行驶。
此外,还可以采用视觉识别算法,通过安装摄像头等设备来实时识别磁导带,从而实现校偏操作。
在算法设计过程中,还需要充分考虑AGV的实际应用环境和工作要求。
例如,如果AGV在转弯时需要尽量保持稳定性,可以通过增加转弯半径或者减小转弯速度来实现。
基于机器视觉的AGV自动转向结构设计
基于机器视觉的AGV自动转向结构设计许军;王宝梁;姚保军;陆尚;李国勤;赵梦诚【摘要】随着智能技术的迅速发展,基于机器视觉的Automated Guide Vehicle(AGV)已经广泛应用于工厂、仓储等领域,而基于机器视觉的AGV能够实现自主行走要依靠能够执行控制指令进行自动转向的结构.文章设计了一种自动转向结构,能够方便在现有的微型电车等现有的转向基础上进行安装,结构紧凑.【期刊名称】《汽车实用技术》【年(卷),期】2018(000)001【总页数】2页(P62-63)【关键词】机器视觉;AGV;结构设计;转向【作者】许军;王宝梁;姚保军;陆尚;李国勤;赵梦诚【作者单位】淮安信息职业技术学院,江苏淮安 220003;淮安信息职业技术学院,江苏淮安 220003;淮安信息职业技术学院,江苏淮安 220003;淮安信息职业技术学院,江苏淮安 220003;淮安信息职业技术学院,江苏淮安 220003;淮安信息职业技术学院,江苏淮安 220003【正文语种】中文【中图分类】U463.4引言目前,AGV作为一种运输车辆而广泛的应用于工厂中。
在物料搬运系统中起到非常重要的作用,它能够自动的将货物搬运至运材料处、将成品搬运到指定地点[1]。
基于机器视觉引导的 AGV在行驶过程中,摄像机动态获取车辆周围环境图像信息并与图像数据库进行比较,从而确定当前位置,并对下一步行驶做出决策。
智能AGV 小车机械结构向模块化、可轻易重构的方向发展[2]。
如动力模块中的电机、减速机、检测系统一体化,由机械模块、承载模块用重组方式架构AGV 整机,米克力美已有多款模块化智能 AGV产品在售。
因此文章设计了一种用于自动转向结构,通过配合视觉传感器、控制单元等能够将普通车辆改装成具有自动转向功能的AGV。
1 转向概述普通车辆的转向的结构基本一致,其中对于一些微型电动车辆来说,其实现转向的结构设计不同,按照动力作用位置来分,一般有如下两种转向方式。
AGV车辆转向机构设计1

AGV车辆转向机构设计本文设计研究了一种新型AGV车辆的转向机构。
该转向机构采用了自动引导小车的引导技术,与普通微型汽车的转向机构相结合。
实现了无驾驶员时小车的自动转向,同时兼具一般车辆的转向操控性能。
根据设计要求,本转向系统由机械式转向器,转向助力缸,转向齿轮油泵,转向油箱,以及电机减速箱等组成。
这些部件根据设计原则,被合理选用以布置在狭小的空间之内。
自动转向部分采用了直流伺服电机的控制系统,简单方便,技术成熟,经济性好。
单片机的应用使得电控系统简单而功能强大。
关键词:转向机构自动转向直流伺服外文摘要Title The Turning Mechanism of Automated Guided V ehicle AbstractThis thesis designed the turning mechanism of the new automated guided vehicle.This mechanism adopts the navigation techniques of the automated guided vehicle which was mixed of the turning mechanism on simple tiny vehicle.It achieved the function --automated turning direction ,and this mechanism also contained the manipulation performance on simple vehicle.According to the design demand , the turning mechanism was composed of the mechanical turning module, the auxiliary tub ,the gear oil pump,the oil box,the electric machinery gearbox and so on.These components were fixed up in narrow room according to the design principles.The automated turning part adopted the electric machinery control system, It was simple and economical .And the use of single chip system made the whole system simple and powerful.Keywords:turning mechanism , automated turning , electric machinery control。
AGV车转向总承设计

优秀设计目录摘要 (5)第一章绪论 (7)1.1概述 (7)1.2发展趋势及发展前景 (7)1.3AGV系统的构成与AGV的结构 (8)1.3.1AGV系统的构成 (8)1.3.2AGV的结构 (9)第二章设计任务 (11)2.1设计题目:AGV小车的转向总承设计 (11)2.2设计背景: (11)2.2.1题目简述 (11)2.2.2使用状况 (11)2.2.3生产状况 (11)2.3设计参数 (11)2.4设计任务 (11)第三章 AGV机械结构和驱动转向系统的设计 (12)3.1AGV机械结构的设计 (13)3.1.1车体尺寸结构设计 (13)3.1.2驱动方式选择 (13)3.2驱动系统部件的选择与校核 (14)3.2.1电机的选择与联轴器的选用 (14)3.2.2AGV行驶阻力的计算 (14)3.3主减速比的选择 (16)3.4蜗杆蜗轮的设计 (17)3.5涡轮轴的设计 (20)3.6后轮轴的设计 (22)3.7蜗杆轴的设计 (24)3.8车轮支架的设计 (25)第四章总结 (27)致谢 (28)参考文献 (29)摘要AGV全称自动导引小车(Automatic Guided Vehiele),它是在计算机的控制下,经磁或激光等导向装置引导并沿程序设定路径运行完成作业的无人驾驶自动小车,伺服驱动。
它为现代制造业、现代物流提供了一种高度柔性化和自动化的运输方式。
目前AGV小车广泛运用在制造业、物流仓储业、汽车、造纸等行业。
随着AGV小车的发展,努力设计一个更为合理简便的操作方式的AGV小车,来适用于更多的领域,AGV得到进一步的推广。
AGV是以微控制器为控制核心、蓄电池为动力、装有非接触导引装置的无人驾驶自动导引运载车,其自动作业的基本功能是导向行驶、认址停准和移交载荷。
作为当代物流处理自动化的有效手段和柔性制造系统的关键设备,AGV已经得到了越来越广泛的应用,对AGV的研究也具有十分重要的理论意义和现实意义。
(word完整版)AGV系统结构设计以及动力学建模型
2。
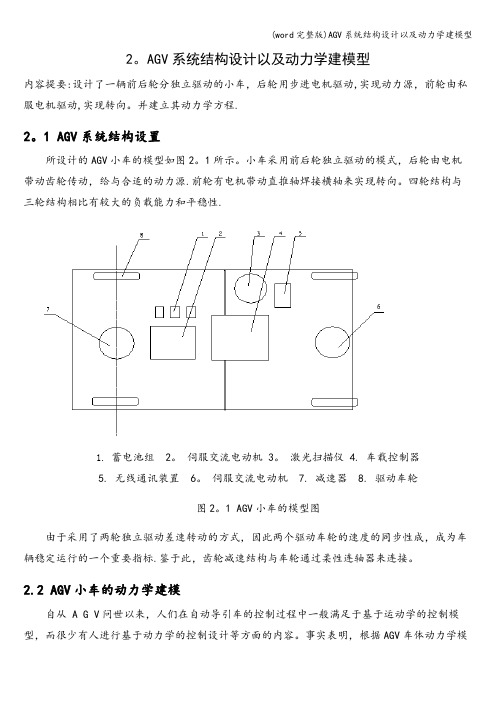
AGV系统结构设计以及动力学建模型内容提要:设计了一辆前后轮分独立驱动的小车,后轮用步进电机驱动,实现动力源,前轮由私服电机驱动,实现转向。
并建立其动力学方程.2。
1 AGV系统结构设置所设计的AGV小车的模型如图2。
1所示。
小车采用前后轮独立驱动的模式,后轮由电机带动齿轮传动,给与合适的动力源.前轮有电机带动直推轴焊接横轴来实现转向。
四轮结构与三轮结构相比有较大的负载能力和平稳性.1.蓄电池组 2。
伺服交流电动机 3。
激光扫描仪 4. 车载控制器5. 无线通讯装置 6。
伺服交流电动机 7. 减速器 8. 驱动车轮图2。
1 AGV小车的模型图由于采用了两轮独立驱动差速转动的方式,因此两个驱动车轮的速度的同步性成,成为车辆稳定运行的一个重要指标.鉴于此,齿轮减速结构与车轮通过柔性连轴器来连接。
2.2 AGV小车的动力学建模自从 A G V问世以来,人们在自动导引车的控制过程中一般满足于基于运动学的控制模型,而很少有人进行基于动力学的控制设计等方面的内容。
事实表明,根据AGV车体动力学模型,可以得到直接的电机输入与行走、导向车轮转速的非线性的耦合关系,将对指导车体机械结构设计、路径规划以及合理的路径跟踪控制规律设计有重要而且深远的意义。
由于 A G V在实际问题中有较严格地面要求的环境中运动,车速较低,限定了加速度的问题,而不会发生明显的车体“上跳"运动的现象出现,故可以在二维空间来研究其动力学模型.现以我以后轮为电机带动齿轮来实现动力驱动的方式传达力矩,前轮则为由电机直接带动轴的转动从而达到转动的方式来实现转向的AGV为例建立动力学模型。
AGV由车体、蓄电池和充电系统、驱动装置、转向装置、精确停车装置、车上控制器、通信装置、信息采样子系统、超声探障保护子系统、移载装置和车体方位计算子系统等等组成。
“智能”较高的AGV都有车上控制器,它类似于机器人控制器,用以对AGV进行监控.控制器计算机通过通信系统从地面站接受指令并报告自己的状态。
AGV搬运机器人的转向和驱动系统

AGV 搬运机器人的转向和驱动系统
AGV 搬运机器人的转向和驱动系统,你真的了解吗?
AGV 搬运机器人的转向和驱动系统常采用共用方式,采用电气方法实现前进、后退、自动导向和转弯分岔。
一般由驱动轮、从动轮和转向机构组成,形式有3 轮、4 轮、6 轮及多轮等。
3 轮结构一般采用前轮转向和驱动。
4 轮或6 轮一般采用双轮驱动、差速转向或独立转向。
为了提高定位精度,驱动及转向电机都采用直流伺服电机。
此外,在AGV 小车的转向和驱动系统中往往还装有制动装置。
实现AGV 小车转向的原理可归纳为铰轴转向式和差速转向式。
1.铰轴转向式
AGV 的方向轮装在转向铰轴上,转向电机通过减速器和机械连杆机构控制铰轴,从而控制方向轮的取向。
驱动轮兼作转向轮,导向伺服电机根据导向讯号,借助转向机构调整驱动轮的转角,完成AGV 自动导向及转向分岔。
这种方案的优点是结构简单、成本低,适用于需要较多车数而准停精度要求不很严格的场合。
2.差速转向式
在AGV 的左、右轮上分别装上两个独立的驱动电机,通过控制这两个驱动轮的速度比来实现车体的转向。
这种方案结构简单、定位精度高、转弯半径小,一般可设计成4 轮或6 轮的形式。
从AGV 小车的轮系结构来划分,可将转向的实现划分为普通轮系转向式和全方位轮系转向式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计手册
(工科专业)
学生姓名:马凯林
指导教师:王宏志
专业:机械设计制造及其自动化班级: 0842
吉林工程技术师范学院教务处制
毕业设计选题论证书
毕业设计任务书
题目: AGV车辆转向机构设计
机械工程系(分院)机自动化专业 0842 班
学生姓名:马凯琳学号: 31 指导教师:王宏志职称:讲师
教研室主任:王桂萍
系(分院)主任:周广文
任务书下发日期:2011年12月26日
吉林工程技术师范学院教务处制
本科生毕业设计开题报告
题目 AGV车辆转向机构设计
院(系)____ 机械工程学院_ 专业_ 机械设计制造及其自动化
班级______ 0842__________ _ 姓名_____ 马凯琳________ _ 指导教师____ 王宏志_______ __开题时间2012年3月27日
吉林工程技术师范学院教务处制
一、课题研究意义
二、研究方案
三、设计(论文)课题评议
四、考核组成员
毕业设计指导教师评阅意见
注:优(90分以上);良(80~89);中(70~79);及格(60~69);不及格(60以下)
毕业设计指导教师评定成绩标准
注:如属论文且无设计图纸则将第11项的得分加到第12项中
毕业设计评阅人评阅意见
注:1.参照评价项目内涵与标准,A为合格、B为基本合格、C为不合格;2.有1个C,需修改后答辩,有1个以上C不同意答辩。
毕业设计答辩记录
毕业设计答辩小组评语及综合成绩
注:优(90分以上);良(80~89);中(70~79);及格(60~69);不及格(60以下)
毕业设计答辩成绩评定标准。