北理工期末考试微机原理
汇编语言微机原理及接口技术期末试卷含答案[整理]
![汇编语言微机原理及接口技术期末试卷含答案[整理]](https://img.taocdn.com/s3/m/f41bb35132687e21af45b307e87101f69e31fb3b.png)
1 北京大学北京综合100 95.80 100 1002 清华大学北京理工94.72 100 85.10 92.17 0000000003 复旦大学上海综合54.89 50.75 55.39 64.64 0000000004 浙江大学浙江综合52.91 52.47 51.31 50.74 0000000005 上海交通大学上海综合43.63 48.62 35.35 49.77 0000000006 南京大学江苏综合42.47 40.83 42.13 43.67 0000000007 武汉大学湖北综合41.07 41.98 36.70 51.28 0000000008 中国人民大学北京综合35.65 28.87 36.76 66.26 0000000009 吉林大学吉林综合35.41 32.56 36.51 37.87 00000000010 中山大学广东综合33.78 33.81 29.68 50.63 000000000011 华中科技大学湖北理工33.77 35.60 29.16 41.11 000000000012 四川大学四川综合33.37 34.69 29.05 42.65 000000000013 南开大学天津综合29.16 29.32 25.30 44.89 000000000014 山东大学山东综合29.13 26.17 29.49 39.24 000000000015 北京师范大学北京师范28.92 29.27 23.97 50.61 000000000016 哈尔滨工业大学黑龙江理工27.82 26.67 26.20 38.43 000000000017 中国科技大学安徽理工27.79 28.06 24.46 39.70 000000000018 郑州大学河南综合8.94 5.30 11.34 16.39 00000000019 西安交通大学陕西综合26.73 25.40 25.07 39.33 000000000020 厦门大学福建综合26.03 24.77 23.40 44.72 000000000021 天津大学天津理工21.98 21.23 19.33 38.38 000000000022 北京航空航天大学北京理工21.96 23.55 16.81 38.33 000000000023 同济大学上海理工21.63 19.56 19.68 43.02 000000000024 华东师范大学上海师范21.21 21.35 19.17 27.34 000000000025 中国农业大学北京农林20.00 21.48 14.41 40.59 000000000026 东南大学江苏综合19.73 16.99 19.03 38.16 000000000027 大连理工大学辽宁理工17.80 17.05 15.20 35.12 000000000028 西北工业大学陕西理工17.08 17.32 13.39 34.77 000000000029 北京理工大学北京理工16.60 15.97 13.26 38.43 000000000030 华南理工大学广东理工16.47 15.35 14.36 33.56 000000000031 重庆大学重庆综合15.19 12.84 13.59 38.08 000000000032 东北大学辽宁理工15.08 12.56 14.69 31.19 000000000033 兰州大学甘肃综合14.61 11.87 13.64 36.33 000000000034 湖南大学湖南综合14.05 11.51 13.30 33.00 000000000035 北京科技大学北京理工13.80 12.01 12.28 32.57 000000000036 华东理工大学上海理工12.15 12.70 9.33 23.30 00000000037 中国矿业大学江苏理工11.94 10.67 10.01 30.27 000000000038 中国地质大学湖北理工11.82 10.04 10.34 30.97 000000000039 华中师范大学湖北师范11.70 11.70 10.49 16.20 000000000040 西北大学陕西综合11.63 10.27 11.01 22.04 000000000041 中国海洋大学山东综合11.21 11.66 8.03 25.71 00000000042 中国石油大学北京理工11.06 10.14 8.33 32.57 00000000043 北京交通大学北京理工10.87 10.33 7.89 31.27 00000000044 东北师范大学吉林师范10.81 10.06 10.02 18.22 000000000045 南京理工大学江苏理工10.68 11.28 7.69 23.15 00000000046 南京航空航天大学江苏理工10.46 11.63 7.57 18.18 00000000047 华中农业大学湖北农林10.24 10.80 7.91 18.67 00000000048 西南交通大学四川理工10.15 8.68 9.33 23.10 00000000049 电子科技大学四川理工10.02 8.25 8.00 33.05 00000000050 西南大学重庆综合9.96 8.65 9.32 20.69 00000000051 哈尔滨工程大学黑龙江理工9.83 11.43 5.77 22.43 00000000052 河南大学河南综合9.81 11.40 5.70 22.4153 武汉理工大学湖北理工8.82 7.23 8.52 19.53 00000000054 西北农林科技大学陕西农林8.74 6.85 7.20 29.95 00000000055 南京师范大学江苏师范8.70 6.05 10.28 14.66 00000000056 苏州大学江苏综合8.57 6.95 9.15 13.74 00000000057 长安大学陕西理工8.57 8.62 7.24 14.50 00000000058 南京农业大学江苏农林8.49 6.41 8.14 23.27 00000000059 河海大学江苏理工8.44 7.96 6.42 22.81 00000000060 北京邮电大学北京理工8.33 8.04 5.60 26.21 00000000061 西安电子科技大学陕西理工8.31 7.97 6.85 17.93 00000000062 湖南师范大学湖南师范8.25 6.67 8.72 13.92 00000000063 上海大学上海综合8.18 6.84 8.09 16.01 00000000064 云南大学云南综合7.98 5.85 7.87 21.60 00000000065 东华大学上海理工7.80 7.54 6.03 19.16 00000000066 北京化工大学北京理工7.76 8.88 4.68 17.87 00000000067 北京林业大学北京林业7.66 7.09 5.61 23.05 00000000068 北京工业大学北京理工7.54 7.15 6.63 14.08 00000000069 暨南大学广东综合7.36 6.23 6.90 16.44 00000000070 河南科技大学理工7.35 6.20 6.89 16.40 71 南昌大学江西综合6.91 6.51 5.89 14.49 000000000072 华南师范大学广东师范6.61 3.81 8.01 15.39 00000000073 华南农业大学广东农林6.25 5.81 6.26 7.46 00000000074 中央民族大学北京民族5.97 3.66 5.00 27.16 00000000075 山西大学山西综合5.95 5.35 7.02 1.37 00000000076 中国政法大学北京政法5.85 3.28 5.04 28.00 00000000077 陕西师范大学陕西师范5.80 4.81 7.28 1.27 00000000078 福州大学福建理工5.80 4.53 5.72 13.70 00000000079 中南财经政法大学湖北财经5.78 3.50 6.56 15.20 00000000080 内蒙古大学内蒙古综合5.47 4.04 4.88 17.99 00000000081 上海财经大学上海财经5.45 3.80 5.27 16.87 00000000082 太原理工大学山西理工5.42 4.28 5.30 12.84 00000000083 江南大学江苏综合5.37 5.81 3.48 13.22 00000000084 南方医科大学广东医药5.27 5.51 4.71 5.75 00000000085 河南中医药大学河南医药5.17 6.20 4.29 2.13 00000000086 东北林业大学黑龙江林业5.11 4.00 4.97 12.53 00000000087 燕山大学河北理工5.10 5.63 4.28 5.23 00000000088 新疆大学新疆综合5.04 3.28 4.43 20.33 00000000089 贵州大学贵州综合5.00 4.34 3.92 15.41 00000000090 安徽大学安徽综合5.00 3.58 5.04 13.42 00000000091 南京工业大学江苏理工4.97 5.75 4.44 1.35 00000000092 首都师范大学北京师范4.87 4.68 5.22 2.45 00000000093 辽宁大学辽宁综合4.79 2.19 5.98 14.10 00000000094 海南大学海南综合4.75 5.29 2.54 14.26 00000000095 广西大学广西综合4.70 3.29 4.30 16.06 00000000096 四川农业大学四川农林4.62 4.60 3.23 12.67 00000000097 中央财经大学北京财经4.60 1.39 3.27 35.11 00000000098 河南师范大学河南综合4.58 4.21 4.55 6.09 00000000099 华北电力大学河北理工4.39 3.42 3.22 17.83 000000000 100 河南理工大学河南理工4.38 4.80 4.28 0.77 000000000。
北理工《微机技术及应用》期末考试精选题汇总【含答案解析】 91
( 135 ) 北京理工大学远程教育学院《微机技术及应用》期末试卷(A卷)教学站学号姓名成绩注意:本考试为闭卷考试,考试时间为2小时。
考试过程中不允许使用计算器。
一、填空题(15分)1.已知无符号数A=11001010,B=00001111,那么A和B的和为。
2.寄存器是由组成的。
是由寄存器组成的,它可以看做一个寄存器堆。
3.8086/8088系统可寻址的存储空间为1MB,即该存储空间应具有个存储单元,每个单元具有位,其地址线根数最少应为。
4.只有在CPU和之间传输数据,以及填充时,CPU才执行总线周期。
5.是中断处理子程序的入口地址,每一个中断向量占用个存储单元。
6.在8086/8088存储空间中,为了简化操作,要求各个逻辑段从节的整数边界开始,也就是段首地址应该是“0”。
7.8251A是一个通用串行输入/输出接口,可用来将86系列CPU以同步或异步方式与外部设备进行。
8.在8259A中,优先权判别器PR用来识别中断请求信号的。
9.将模拟信号转换成数字信号的器件称为。
在A/D转换器中,分辨率表示转换器对的敏感程度。
二、选择题 (15 分)1.8086CPU中,标志位可分为状态标志和控制标志,在下面的标志位中属于状态标志,属于控制标志。
A、ZF, SFB、TF, IFC、DF, AF2.设(DS)=2500H,(SS)=4000H,(ES)=5000H,(BP) =(BP)=1500H, 指令MOV AX, [BP]将要取出的数据的物理地址为;指令MOV AX, [BX]将要取出的数据的物理地址为;指令MOV AX, ES:[BX]将要取出的数据的物理地址为。
A、26500HB、41500HC、51500H3.MOV AL,‘A’指令的源操作数的寻址方式为。
A、直接寻址B、寄存器寻址C、立即数寻址4.下面的中断中,只有需要硬件提供中断类型码。
A、INTRB、INT nC、NMI5.下面指令中,不用保护返回地址。
北京理工大学自动化专业微机原理硬件软件实验

北京理工大学自动化专业微机原理硬件软件实验------------------------------------------作者xxxx------------------------------------------日期xxxx微机原理与接口技术硬件实验报告班级:姓名:学号:实验一: 8259中断控制器实验一、实验目的1. 掌握8259的工作原理。
2. 掌握编写中断服务程序的方法。
3. 掌握初始化中断向量的方法。
二、实验内容用单脉冲发生器的输出脉冲为中断源,每按一次产生一次中断申请,点亮或熄灭发光二极管。
三、实验设备微机实验教学系统实验箱、8086CPU模块四、连线①单脉冲发生器输出P+与8259的IR0相连②8259的片选CS8259与CS0相连③8259的INT与8086的INT相连④8259的INTA与8086的INTA相连⑤CS273与CS1相连⑥00与LED1相连其它线均已连好如下图:五、实验步骤(1)连线。
(2)编辑程序,编译链接后,调试程序。
(3)调试通过后,在中断服务程序内设置断点,运行程序,当接收到中断请求后,程序停在中断服务程序内的断点处。
(4)撰写实验报告。
六、实验源程序CODE SEGMENT PUBLICASSUME CS:CODEORG 100HSTART: MOV DX,4A0H ;写ICW1MOV AX,13HOUT DX,AXMOV DX,4A2H ;写ICW2MOV AX,80H ;IR0的中断向量码为80HOUT DX,AXMOV AX,01OUT DX,AX ;一般嵌套,非缓冲,非自动EOIMOV AX,0 ;写OCW1OUT DX,AX ;允许中断;中断向量存放在(0000H:0200H)开始的四个单元里MOV AX,0MOV DS,AXMOV SI,200H ;中断类型号为80HMOV AX,OFFSET HINT ;中断服务程序的入口地址MOV DS:[SI],AXADD SI,2MOV AX,CSMOV DS:[SI],AXSTI ;开中断,设置IF=1JMP $ ;原地跳转HINT: ;中断服务程序XOR CX,0FFH ;CX取反MOV DX,4B0H ;CS273接口的地址,与8个LED灯相连MOV AX,CX ;输出高低电平控制LED灯的亮灭OUT DX,AXMOV DX,4A0H ;OCW2的地址MOV AX,20H ;一般EOI命令,全嵌套方式OUT DX,AXIRET ;中断返回CODE ENDSEND START七、实验思考题1.将P+连线连接到IR1—IR7任意一个;重新编写程序。
北理工计算机组成原理作业题(含北理工计组高频考点)
计算机组成原理第一章:P2存储程序概念;P3计算机的硬件组成;P7冯诺依曼结构和哈佛结构的存储器思想;所布置题目:1-2;1-3;1-4;1-6第二章:P16原码表示法;P17补码表示法;P18反码表示法;P19 3种机器数的比较与转换;P20机器数的定点表示和浮点表示P27例题2-13所布置作业:2-1;2-2;2-3;2-4;2-8;2-20;2-21;2-24第三章:P49机器指令的基本格式;P50地址码结构;P54寻址技术;P63堆栈与堆栈操作;P65指令类型;所布置作业:3-4;3-12;*3-14;3-15;3-16第四章:P80进位的产生和传递;P83定点加减运算+例题4-5,4-6;P91定点乘法运算+*例题4-8表4-3+*例题4-9+*例题4-10+*例题4-12+*例题4-13;P98定点除法运算;P105规格化浮点运算所布置题目:4-4;4-5;*4-8;*4-10;4-12;4-13第五章:P122存储器的组成;P128数据在主存中的存放;P129半导体随机储存器和只读存储器<动态RAM刷新>;P134RAM芯片分析;P139主存储器的连接与控制;P155多体交叉存储技术;P156高速缓冲存储器<地址映像>;P161虚拟存储器所布置题目:5-4;*5-5;*5-7;*5-8;*5-10;*5-11;*5-13;*5-14;5-16;5-19 第六章:P167CPU功能+CPU中的主要寄存器;P169CPU的组成;P170CPU的主要技术参数;P172控制器的组成和实现方法;P175时序系统与控制方式<控制方式>;P181微程序控制原理所布置作业;*6-4;6-8;*6-14;6-15第七章:P213总线概述;P216总线仲裁;所布置题目:7-2;7-7注:1.带*为高概率考试题;2.页码代表着那个标题所开始的页码,不代表结束。
3.计算机组成原理(第三版)为蒋本珊编著。
北京理工大学微机原理实验报告
微机原理与接口技术实验报告实验内容:汇编语言程序设计实验组别:12姓名:班级:学号:一、实验目的1、熟悉IDE86集成开发环境的使用。
2、通过编程、上机调试,进一步理解汇编语言的设计思路与执行过程。
3、熟悉DOS命令调用,以达到输入输出、返回DOS系统等目的。
4、掌握利用汇编实现求和与求最值的方法。
5、掌握利用汇编实现数制转换的方法。
6、巩固理论知识,锻炼动手编程,独立思考的能力。
二、实验内容(具体内容)1、求从TABLE开始的10个无符号字节数的和,并将结果放在SUM字单元中。
并查看前5个,前8个数之和以及各寄存器和内存的状态。
2、在1的基础上修改程序,求出10个数中的最大值和最小值,最后将最大最小值分别赋给MAX及MIN。
3、求1到 100 的累加和,并用十进制形式将结果显示在屏幕上。
要求实现数据显示,并返回DOS状态。
三、实验方法1、设计思路(1)实验1的设计思路:先将10个要相加的数存在以TABLE为首的10个连续的存储单元中,然后利用循环结构依次取出数值放在AL中并累加,若有进位则加到AH中直至循环10次累加结束,将累加的结果放在SUM中并返回DOS状态。
(2)实验2的设计思路:先将10个要比较的数放在以TABLE为首的10个连续的存储单元中。
将第一个数首先赋给AL和AH(分别存储相对最小和最大值)在利用LOOP循环结构,依次和下面的数进行比较,每次把相对的最大值与最小值存储到AH和AL中直至循环9次比较结束,将AH和AL里面的最大值与最小值赋给MAX和MIN,返回DOS状态(3)实验3的设计思路:先在内存中定义COUNT=100,表示1-100求和,若相求1-n的和并显示只需COUNT的值为n即可,同时定义一块以DNUM为首地址的数据区用于存储累加和的十进制数对应的ASCII码。
先利用AX和LOOP求出1-COUNT的累加和存在AX中;在进行数值转化,AX 依次除10取余数保存,将16进制数转化为10进制ASCII码值并存在DUNM中。
北京理工大学微机原理实验报告二

本科实验报告实验名称:利用中断方式设计数字时钟课程名称:实验时间:任课教师:实验地点:实验教师:实验类型:□原理验证■综合设计□自主创新学生姓名:学号/班级:组号:学院:同组搭档:专业:成绩:实验二利用中断方式设计数字时钟一、实验目的1、掌握PC 机中断处理系统的基本原理。
2、熟悉定时/计数器8254 工作原理及其编程方法。
3、利用实验板上的8254 定时器为中断源发中断申请,中断请求用IRQ3(系统总线区的IRQ)。
4、熟悉数码管显示原理,掌握数码管显示接口技术。
5、学习数字时钟原理,实现数字时钟。
6、掌握中断控制器8259 管理。
二、实验内容与步骤接线:三、实验原理1、PC 机用户可使用的硬件中断只有可屏蔽中断,由8259 中断控制器管理。
中断控制器用于接收外部的中断请求信号,经过优先级判别等处理后向CPU 发出可屏蔽中断请求。
IBMPC、PC/XT 机内有一片8259 中断控制器对外可以提供8 个中断源:中断源中断类型号中断功能IRQ0 08H 时钟IRQ1 09H 键盘IRQ2 0AH 保留IRQ3 0BH 串行口2IRQ4 0CH 串行口1IRQ5 0DH 硬盘IRQ6 0EH 软盘IRQ7 0FH 并行打印机8 个中断源的中断请求信号线IRQ0~IRQ7 在主机的62 线ISA 总线插座中可以引出,系统已设定中断请求信号为“边沿触发”,普通结束方式。
对于PC/AT 及286 以上微机内又扩展了一片8259 中断控制,IRQ2 用于两片8259 之间级连,对外可以提供16 个中断源:中断源中断类型号中断功能IRQ8 070H 实时时钟IRQ9 071H 用户中断IRQ10 072H 保留IRQ11 073H 保留IRQ12 074H 保留IRQ13 075H 协处理器IRQ14 076H 硬盘IRQ15 077H 保留实验系统总线区的IRQ 接到了3 号中断IRQ3 上,即进行中断实验时,所用中断类型号为0BH。
北理工微机原理实验3
北理工微机原理实验3实验三串行通信一、实验目的1、了解串行通信的基本原理。
2、掌握串行接口芯片8251 的工作原理和编程方法。
2、掌握串行接口芯片8250 的工作原理和编程方法。
3、掌握对串行接口芯片的初始化编程;学会串行通信半双工和全双工的编程技巧。
二、实验内容及步骤1、利用PC 机系统的串行通信接口实现与实验系统的双机通信,PC 机的串行通信接口的端口地址为3F8H,并画出三线连接,七线连线通信接口的连线图,接口为标准RS――232插座。
图1 七线连线通信接口的连线图2、按图1连接好电路,其中8254计数器用于产生8251 的发送和接收时钟,TXD 和RXD 连在九针接口处。
3、接线。
CLK0 /8254 接1M时钟CLK /8251 接1M时钟GATE0 /8254 接+5V0UT0 /8254 接TX/RXCLK /8251 CS /8254 接Y0 /IO 地址CS /8251 接Y7 /IO 地址RXD /8251 接TXD /九针接口TXD /8251 接RXD /九针接口4、8254 计数器的计数初值=时钟频率/(波特率×波特率因子),这里的时钟频率接1MHz,波特率若选1200,波特率因子若选16,则计数器初值为52。
5、设串行通信的波特率为1200、偶校验、数据位为7 位、一位停止位,利用查询方式实现单工通信。
要求发送方将任一文件传送到收方,收方收到后将源程序写入磁盘。
分别编写收方和发方的通信程序。
6、上述参数不变,用中断方式实现半双工通信,编写程序。
7、PC 机寄存器的端口地址如下表所示。
PC 机寄存器的端口地址PC 机寄存器的端口地址I/O 端口IN/OUT 3F8* OUT 3F8* IN 3F8** OUT 3F9** OUT 3F9* OUT 3FB OUT 3FA IN 3FC OUT 3FD IN 3FE IN * 线路控制寄存器第七位DLAB=0 ** 线路控制寄存器第七位DLAB=1 波特率和除数因子对照表因子值波特率波特率单位HZ 单位HZ MSB LSB 50 09 00 1800 75 06 00 2000 110 04 17 2400 03 59 3600 150 03 00 4800 600 00 C0 9600 1200 00 60 寄存器名称发送保持寄存器接收数据寄存器波特率因子波特率因子(MSB) 中断允许寄存器线路控制寄存器中断标志寄存器MODEM 控制寄存器线路状态寄存器MODEM 状态寄存器因子值MSB 00 00 00 00 00 00 LSB 40 3A 30 20 18 0C 三、程序实现对于整个程序的实现,可以分为几个步骤。
北理工 微型计算机原理与接口 总复习PPT.
– “正交性”,为每个指令都提供所有的寻址模式, 这给微处理器增加了一些复杂性 – X86
• RISC
– 精简指令集 – 原因
• 编译器的使用逐渐增多而汇编语言的使用相对减少, 使得大多数正交寻址模式基本上已被程序员所忽略 • 相比用更精简的一系列指令来完成同一个任务,用 单一复杂指令甚至会更慢 • 微处理器开始比内存运行得更快,需要有更多寄存 器(以及后来的缓存)来支持更高频率的操作
第20讲 最后一课
关于考试
• 填空
– 20空,20分
• 简答
– 6题• 综合
– 4题,50分
计算机基础
什么是计算机
• 计算机
– Computer VS Calculator – 模拟人脑 – 电脑:
• 是一种利用电子学原理,根据一系列指令来对数据 进行处理的机器。 • 处理信息的工具。根据图灵机理论,一部具有最基 本功能的计算机,应当能够完成任何其它计算机能 做的事情。 • 只要不考虑时间和存储因素,从个人数码助理 (PDA)到超级计算机都应该可以完成同样的作业。
地址译码
(2)全地址译码
除去用作片内译码的低位地址后,把全部高位地址进 行译码来产生片选信号; 用在较大的系统中; 提供了对全部存储空间的寻址能力; 存储单元地址是唯一的、不存在地址重叠问题; 需要较多的译码逻辑;
地址译码
(3)部分地址译码
除去用作片内译码的低位地址后,将高位地址的一部 分进行译码来产生片选信号; 它将存储器空间分成许多块,避免了部分译码不能充 分利用存储空间的缺点。这些存储器块有时候被称为 页; 应用举例:将具有 64K存储空间分成 16块,每块为4K 字节,这样只需利用 A12—A15 四根高位地址线译码产 生16个译码控制信号。使用块地址译码的优点是某一 设备所占用的存储空间不超过一块;
北京理工大学微机原理实验报告四

本科实验报告实验名称:A/D和D/A转换课程名称:实验时间:任课教师:实验地点:实验教师:实验类型:□原理验证■综合设计□自主创新学生姓名:学号/班级:组号:学院:同组搭档:专业:成绩:实验四 A/D和D/A转换一、实验目的1、了解A/D 转换的基本原理,掌握ADC0809 的使用方法。
2、了解D/A 转换的基本原理,掌握DAC0832 芯片的使用方法。
3、了解直流电机控制的基本方法。
二、实验内容与步骤(一)A/D 转换部分1、接线:2、实验电路原理图下图通过实验台左下角电位器RW1 输出0~5V直流电压送入ADC0809 通道0(IN0),利用debug 的输出命令启动A/D转换器,输入命令读取转换结果,验证输入电压与转换后数字的关系。
启动IN0开始转换: Out 298H读取转换结果: In 298H3、用万用表测量CLOCK、ADD-C、ADD-B、ADD-A 在实验系统上如何联系的。
4、编程按中断方式采集IN0 输入的电压,在屏幕上显示出转换后的数据(用16 进制数)。
5、考虑如果采用IN7 输入的电压,启动开始转换和读取转换结果的地址应该是多少。
6、按查询方式采集IN0 输入的电压,软硬件如何实现。
编程方案1、ADC0809 的IN0 口地址为298H。
2、IN0 单极性输入电压与转换后数字的关系为:其中Ui 为输入电压,UREF 为参考电压,这里的参考电压为+5V电源。
3、一次A/D 转换的程序可以为MOV DX, PortOUT DX,AL ;启动转换;延时IN AL,DX ;读取转换结果放在AL 中(二) D/A 转换部分1、接线:CS /0832 接 Y2 /IO 地址用万用表测量 WR2 和XFER 在实验系统上如何联系的。
2、实验电路原理如图2,DAC0832 采用单缓冲方式,具有单双极性输出端(图中的Ua、Ub),利用debug 输出命令(Out 290 数据)输出数据给DAC0832,用万用表测量单极性输出端Ua 及双极性输出端Ub 的电压,验证数字与电压之间的线性关系。
微机原理 期末考试题库及答案(含3套试卷)
微型计算机原理与接口技术综合测试题一一、单项选择题 (下面题只有一个答案是正确的,选择正确答案填入空白处)1.8086CPU通过(1 )控制线来区分是存储器访问,还是I/O访问,当CPU执行IN AL,DX指令时,该信号线为( 2 )电平。
(1) A. M/ B. C. ALE D. N/(2) A. 高 B. 低 C. ECL D. CMOS2.n+1位有符号数x的补码表示范围为()。
A. -2n < x < 2nB. -2n ≤ x ≤ 2n -1C. -2n -1 ≤ x ≤ 2n-1D. -2n < x ≤ 2n3.若要使寄存器AL中的高4位不变,低4位为0,所用指令为()。
A. AND AL, 0FHB. AND AL, 0FOHC. OR AL, 0FHD. OR AL 0FOH4.下列MOV指令中,不正确的指令是()。
A. MOV AX, BXB. MOV AX, [BX]C. MOV AX, CXD. MOV AX, [CX]5.中断指令INT 17H的中断服务程序的入口地址放在中断向量表地址()开始的4个存贮单元内。
A. 00017HB. 00068HC. 0005CHD. 0005EH6.条件转移指令JNE的条件是()。
A. CF=0B. CF=1C. ZF=0D. ZF=17. 在8086/8088 CPU中,一个最基本的总线读写周期由(1 )时钟周期(T状态)组成,在T1状态,CPU往总线上发( 2 )信息。
⑴ A. 1个 B. 2个 C. 4个 D. 6个⑵ A. 数据 B . 地址 C. 状态 D. 其它8. 8086有两种工作模式, 最小模式的特点是( 1 ),最大模式的特点是( 2 )。
⑴ A. CPU提供全部控制信号 B. 由编程进行模式设定C. 不需要8286收发器D. 需要总线控制器8288⑵ A. M/ 引脚可直接引用 B. 由编程进行模式设定C. 需要总线控制器8288D. 适用于单一处理机系统9.在8086微机系统的RAM 存储单元器0000H:002CH开始依次存放23H,0FFH,00H,和0F0H四个字节,该向量对应的中断号是( )。
北京理工大学微机原理与接口技术考题

北京理工大学微机原理与接口技术考题一、单选题:1、处理器通过总线操作与外界进行一次数据交换的过程常被称为___D__。
A. T状态B. 指令周期C. 时钟周期D. 总线周期2、指令_____B____实现对EAX当中D0位求反,其他位不变的功能。
A. not eaxB. xor eax,1C. or eax,1D. and eax,13、下列存储器在断电后,存储信息会消失的是____C_。
A. Flash memoryB. EEPROMC. SRAMD. EPROM4、总线操作实现数据传输,可以不使用时钟信号的同步方式是___C__。
A. 同步时序B. 半同步时序C. 异步时序D. 交叉时序5、减法指令产生差值为38H,则标志正确的是____C__。
A. ZF=1B. SF=1C. PF=0D. PF=16、8086处理器上电后,执行的第一条指令所在的主存储器物理地址是_A_。
A. FFFF0HB. 3FFHC. 0D. FFFFFH7、指令__D____实现对EAX当中D0位设置为1,其他位不变的功能。
A. xor eax,1B. not axC. and eax,1D. or eax,18、8086处理器的基本总线周期包含有___A___个时钟周期。
A. 4B. 2C. 3D. 59、寄存器EDX的低8位部分可以用___A___表达。
A. DLB. DHC. DXD. EX10、IA-32处理器包括___D___。
A. 8086B. 8088C. 80286D. 80386二、判断题:1、由于总线具有共用的特点,所以某一时刻可以由多个总线主控设备来控制系统总线。
N2、由于总线具有共用的特点,所以某一时刻可以有多个接收者从总线接收信号。
Y3、16位IBM PC/AT机采用ISA系统总线。
Y4、冯•诺伊曼计算机的核心思想包括存储程序和程序控制。
Y5、语句“mov eax,ffh”没有语法错。
N6、无符号数在前面加零扩展,数值大小不变;有符号数前面进行符号扩展,位数加长一位、数值增加一倍。
北理工微机原理第一章课件共49页文档
版社,冯博琴主编 《单片微型计算机原理、应用及接口技术》第二版,(第10、
第11章除外),国防工业出版社,张迎新 等编著。
第一章 计算机基础知识
§1-1 数制 十进制、二进制、十六进制
19 00010011B 13H
编语言程序设计。
考试要求
了解微型计算机的基本组成电路、8088 CPU的结构、存储 器、总线结构以及数据在电路中的形式;
理解可编程接口芯片的初始化编程原理,不要求熟记对应 的控制字、方式字等;
掌握8088汇编语言的编程方法及可编程接口芯片的初始化 编程;
理解MCS-51单片机的内部结构、外部引脚、CPU、存储器、 并行I/O口、串行口、定时器/计数器及中断系统等基本 结构;
为什么要用十六进制?
是为了简化二进制的书写,便于记忆
返回
§1-2 逻辑电路
逻辑电路由其三种基本门电路组成。
(1)非门 A 1 Y Y=A
(2) 或门 A B
≥1 Y
Y=A+B
逻辑电路
(3)与门 A B&
Y Y=AB
(4)异或门 A =1 Y Y=A⊕ B
B
=AB+AB
异或运算的特点为:相同为0,相异为1;
第四章:16位微处理器(以最小工作模式为主)
第五章:8086系列微计算机的指令系统 第六章:程序设计(简单汇编语言程序设计)
第七章:汇编语言及汇编程序
第八章:输入/输出接口 并行通信及接口芯片8255A,串行通信及接口芯片8251 注:第九章以后为微机原理(II)的内容
微机控制与应用技术
北京理工大学-微机原理综合设计实验-数字电压表A
北京理工大学-微机原理综合设计实验-数字电压表A————————————————————————————————作者:————————————————————————————————日期:微机原理与接口技术实验报告实验内容:微机原理综合设计实验数字电压表A组别:31姓名:12届黄大师班级:xxxxxxxxx 学号:xxxxxxxxxx一、实验目的1、掌握8255的使用及编程原理。
2、掌握8253定时/计数器的编程原理。
3、掌握ADC0809的使用方法。
4、掌握共阴极七段数码管的工作原理。
5、加强多芯片的综合运用。
6、加强汇编语言程序设计。
二、实验内容利用ADC0809采集电位器的电压值,将采集的电压值通过8255显示在七段数码管上,显示数据保留小数点后2位,利用8253定时数据更新,每隔0.5秒数据更新一次。
扩展要求:具有设置报警阈值功能,当超过阈值时,点亮一个LED灯。
三、实验方法1、设计思路先利用ADC0809采集电位器的电压值,此时的电压值在AL中,但其真正的值应该为5/255*AL伏。
根据要求保留小数点后2位,利用程序先将AL乘以500/255,约为196,即将电压值扩大100倍,先除以100,得到最高位,再依次除以10,得到小数点后第一,二位,分别存在连续的三个存储单元中。
定义0-9共阴极七段数码管的显示码数据段,再通过8255 依次选通3个数码管,通过8255依次送入刚才所得的三个值的显示码。
利用8253工作在方式二,每隔0.5秒产生一低脉冲送到8255,利用程序检验,每隔0.5秒才调用电压采集程序。
对于扩展要求可利用74LS273实现。
实验简单主要原理图如下:将可变电位器AN0与ADC0809的ADIN0相连,将CS2与ADC0809的片选CS0809端相连,将ADC0809的EOC 与8255的PC0相连,CS0与8253的片选CS8253相连,CLK3(750KHz )与8253CLK0相连,8253的OUT0与8253CLK2相连,OUT2与8255的PA0相连,CS1与8255的片选CS8255相连,PC4-PC6与LED1-LED3依次相连,PB0-PB7依次与LED-A —LED-DP 相连。
北理工微机原理复习大纲
《微机原理与接口》复习大纲1、 课程简介以Intel 8088 16位微处理器为背景,介绍了8088微处理器的结构;指令系统与汇编程序设计;存储器系统设计;输入/输出接口电路设计与中断控制器8259A;并行接口芯片8255;串行接口芯片8250;定时/计数器8253;模拟量输入输出电路及接口设计等内容。
2、 课程重点章节及内容简介第一章 基础知识1、 常用数制:二、八、十、十六进制2、 原码、反码与补码、带符号数的运算时的溢出判断3、 常用逻辑门(与、或、非、与非、或非)、译码器(74LS138)与逻辑运算4、 二进制编码:BCD与ASCII编码、奇偶校验5、 微处理器的发展史:分代6、 作业:3、4、5、6、9、10、11第二章 微型计算机基础1、8088的内部结构(EU、BIU)、引脚与功能2、8088CPU的寄存器结构:通用、专用、标志寄存器3、8088微处理器的存储器组织、物理地址的计算4、8088总线周期5、8088CPU的最小/最大工作模式、典型操作时序图、最小模式下典型原理图的连接。
6、流水线技术、CACHE技术7、 总线的功能、性能指标、常用总线8、 作业:7、8、10、11、12、13、15、16、18第三章 指令系统1、指令的格式、指令的执行时间2、寻址方式(1)立即寻址汇编格式:n n为8bit或16bit 功能:n为操作数本身(2) 直接寻址 [n]功能:n为操作数的偏移地址(3)寄存器寻址汇编格式:R R为通用寄存器(4) 寄存器间接寻址汇编格式:[R]功能:R的内容为操作数的偏移地址(5) 寄存器相对寻址汇编格式:X[R] X为8位或16bit功能:R+X为操作数偏移地址(6) 基址加变址寻址汇编格式:[BR][IR]功能:BR+IR为操作数的偏移地址注:BR=BX,BP、 IR=SI,DI(7) 相对基址加变址寻址汇编格式: X[BR][IR] X为16bit 功能: BR+IR+X为操作数的偏移地址(8) 隐含寻址如:MUL BL3、8086/8088指令A、 数据传送指令(1) 通用数据传送指令① MOV d, s ② PUSH s③ POP d ④ XCHG d, s ⑤ XLAT注:d, s分别为目的、源操作数(地址)(2) 目标地址传送指令① LEA d, s ② LDS d, s ③ LES d, s(3) 标志位传送指令① LAH F ② SAH F ③ PUSH F ④ POP F(4) I/O数据传送指令① IN 累加器, 端口号 ② OUT 端口号,累加器B、算术运算指令(1) 加法指令① ADD d, s ② ADC d, s ③ INC d(2) 减法指令① SUB d, s ② SBB d, s ③ DEC d ④ NEG d(3) 乘法指令① MUL s ② IMUL s(4) 除法指令① DIV s ② IDIV s ③ CBW 和CWDC、逻辑运算和移位循环指令(1) 逻辑运算指令① AND d,s ② OR d,s ③ XOR d,s ④ NOT d ⑤ TEST d,s(2) 移位指令与循环移位指令SAL、 SHL、SAR、SHR、ROL、ROR、RCL、RCRD、串操作指令(1) MOVS d, sMOVSB/MOVSW(2) CMPS d, sCMPSB/CMPSW(3) SCAS d, sSCASB/SCASW(4) LODS d, sLODSB/LODSW(5) STOS d, sSTOSB/STOSWE、程序控制指令(1) 无条件转移指令 ① JMP目标标号 ② CALL 过程名(2) 条件转移指令 (3) 循环控制指令(4) 中断指令F、处理器控制指令(1) 标志操作指令:CLC、STC、CMC、CLD、STD、CLI、STI(2) 外部同步指令:HLT、NOP、WAIT、LOCK4、重要概念(1) 堆栈的概念:入栈、出栈、堆栈指针的位置(2) 物理地址的计算:寄存器与段寄存器的配合、计算(3) 段内与段间的转移与调用5、作业:2、3、5、6、7、9、12第四章 汇编语言程序设计1、 伪指令和程序结构2、 汇编语言程序设计:顺序、分支、循环结构、子程序结构(1) 程序分段及存储器分配(2) 变量定义(3) 过程的定义3、汇编程序的调试4、DOS功能调用4、典型汇编程序的编程5、作业:2、5、7、12、15、16、17第五章 半导体存储器1、 存储器的分类、主要技术指标2、 存储器与CPU的连接:(1)存储器的地址分配和片选问题;(2)与CPU典型的连接图;(3)存储器的扩展技术3、 DRAM的特点、CACHE的用处4、作业:4、5、6、7、10、11第六章 输入/输出和中断技术1、 I/O接口的概念、功能2、 I/O接口的编址方式3、地址译码、片选信号的产生4、 输入电路、输出电路的设计5、输入输出的控制方式:无条件传送、查询、中断、DMA6、中断技术(1) 中断的概念(2) 8086/8088中断源(内部/外部)(3) 中断的过程:请求、判优、响应、处理、返回(4) 中断向量表结构和功用。
北理工期末考试微机原理.docx
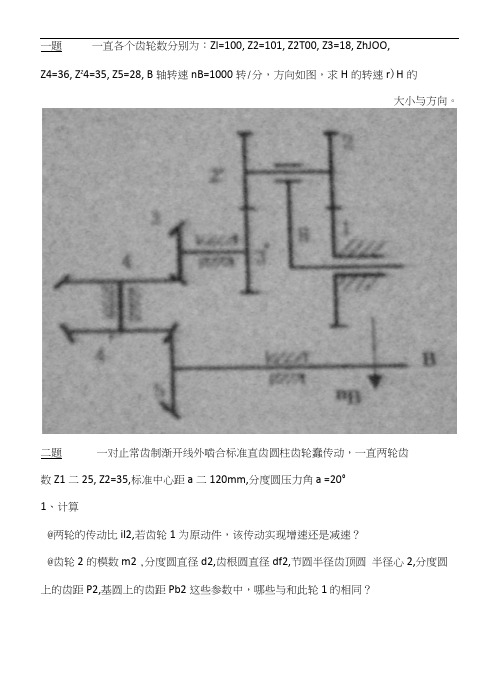
一题一直各个齿轮数分别为:Zl=100, Z2=101, Z2T00, Z3=18, ZhJOO,Z4=36, Z Z4=35, Z5=28, B轴转速nB=1000转/分,方向如图,求H的转速r)H的大小与方向。
二题一对止常齿制渐开线外啮合标准直齿圆柱齿轮蠢传动,一直两轮齿数Z1二25, Z2=35,标准中心距a二120mm,分度圆压力角a =20°1、计算@两轮的传动比il2,若齿轮1为原动件,该传动实现增速还是减速?@齿轮2的模数m2 ,分度圆直径d2,齿根圆直径df2,节圆半径齿顶圆半径心2,分度圆上的齿距P2,基圆上的齿距Pb2这些参数中,哪些与和此轮1 的相同?2、若实际中心距a^l22mm,则该对齿轮的传动比、重合度是否发生变化?为什么?三题计算如图所示机构的自由度,并在图上标出使机构有确定运动是的原动件。
若含有复合较链,局部自由度,虚约束等情况时必须指出。
四题某机械系统以其主轴为等效构件,已知主轴稳定运转一个周期6兀内的等效阻力矩Mer的变化情况如图所示,平均角速度3 m=40rad/s,等效驱动力矩Med为常数,许用运转不均匀系数[S ]=0.04,忽略飞轮以外机构的转动惯量,五题某曲柄摇杆机构如图示意,曲柄等速转动,摇杆CD的左右两个极限位置与机架见的夹角分别为60°和120。
,设摇杆CD长为30mm,要求当摇杆处于左极限位置吋机构的传动角丫=90°。
请确定: 1、曲柄AB和连杆BC的长度;2、该机构有无急冋特性,为什么?判断题1、一对平行轴外啮合斜齿轮圆柱齿轮传动的正确啮合条件是两个齿轮的法面压力角相等,法而模数相等2、死点位置和自锁机构都不能运动,他们的引起原因相同。
3、动平衡试验吋,无论刚性转子上有多少个不平衡质量,分布在几个平面内,都可以通过在选定的两个平衡基面上各加一个适当平衡质量的方法是转子达到动平衡。
4、从动件的常用运动规律不一定都有柔性冲击。
北理工微机原理硬件实验课件

实验程序
MOV DX,482H CODE SEGMENT PUBLIC MOV AX,0 ASSUME CS:CODE OUT DX,AX ORG 100H MOV DX,48AH START: IN AX,DX MOV DX,486H MOV DX,480H 线路状态寄存器 MOV AX,80H IN AX,DX OUT DX,AX LOOP1: MOV DX,480H CALL RECV 设置波特率为:9600 MOV AX,12 CALL SEND JMP LOOP1 OUT DX,AX 9600——12 SEND: MOV DX,482H 4800——24 PUSH AX MOV AX,0 2400——48 MOV DX,48AH 1200——96 OUT DX,AX IN AX,DX MOV DX,486H TEST AX,20H MOV AX,3 JNZ SEND2 OUT DX,AX POP AX JMP SEND SEND2: POP AX MOV DX,480H OUT DX,AX RET RECV: MOV DX,48AH IN AX,DX TEST AX,1 没有接收到 JZ RECV MOV DX,480H 接收到字符 IN AX,DX RET CODE ENDS 指向接收缓冲器 , END START 接收一个字符
8250串行接口实验
8250的内部结构
RBR RSR
THR TSR
实验目的
1.熟悉串行通信的一般原理和8250的工作原理。 2.了解RS—232串行接口标准及连接方法。 3.掌握8250芯片的编程方法。
实验设备
微机实验教学系统实验箱、8086CPU模块。
实验内容
在实验箱与PC机(上位机)之间 实现串行通信,主机每下传一个字符, 若通讯正确,则下位机返回一个同样 的字符;若不正确,则无返回值或者 返回值不同。
北理工微机原理第五章(II)

间接编址方式
通过内存单元来间接访问输入输 出设备,即先访问内存单元,再 由内存单元中的内容来访问输入 输出设备。
输入输出数据传输方式
程序控制方式
在程序的控制下,主机按照预定的顺序和数据格式向外部设备发送数据,并从外部设备接收数据 。
中断方式
当外部设备需要与主机进行数据传输时,通过中断请求向主机发送中断信号,主机响应中断后进 行数据传输。
微处理器的操作模式
实模式
实模式是微处理器的最基本操作模式,它直接访问物理内存 地址。
保护模式
保护模式是实模式的一种扩展,它提供了内存保护、多任务 和多用户等功能。
03
存储器系统
存储器系统的分类与特点
按存储介质分
半导体存储器、磁表面存储器、光盘存储器 等。
按信息保存性分
易失性存储器、非易失性存储器。
• 中断系统的组成:中断系统通常由中断控制器、中断处理程序和中断向 量表等组成。
• 中断优先级和向量表:中断优先级用于确定不同中断事件的优先级,中 断向量表则用于保存中断处理程序的地址。
• 中断处理过程:中断处理过程包括中断请求、中断判优、中断响应、保 存现场、执行中断处理程序、恢复现场和中断返回等步骤。
分类
软盘、硬盘、光盘、U盘等 。
工作原理
利用电磁感应原理或光学原 理将信息记录在盘片上,通 过读写头读取或写入信息。
04
输入输出系统
输入输出系统的概述
01
输入输出系统是计算机中负责与外部设备进行数据交换的子 系统,包括输入设备和输出设备。
02
输入输出系统的主要功能是实现主机与外部设备之间的数据 传输和控制。
是微机系统中最重要的一种总线。
系统总线的特点
北理工《微机技术及应用》课程学习资料(八)02
北理工《微机技术及应用》FAQ(八)第八章输入输出接口技术一、微处理器和外设的通信方式有什么?微处理器和外设的通信有同步和异步两种数据传输方式:(1) 微处理器和外设有同步和异步两种数据传输方式,其中大多数是异步方式。
(2) 在异步方式中,数据传送的控制方式有程序查询、中断与直接存储器存取方式。
二、主机和外设之间传递的信息有哪些?⑴数据:这是要传送的主要对象;⑵外设的状态信号(输入):为了数据传送的可靠、有效,主机需要了解的外设当前状态;⑶(对外设的)控制信号(输出):以便数据传送的正确性。
由于这三类信息意义和作用的不同,不能混淆,一般要分开在不同端口(port) 传送,利用端口地址区分它们。
三、IO接口的主要功能是什么?⑴数据锁存与缓冲:协调主机与外设间数据传输的速度差异;⑵总线隔离:确保非I/O传送期间总线不被外设占用;⑶端口地址译码:识别并选择需要的端口;⑷信息格式转换:以满足主机与外设的各自信息格式的需要。
如模数转换,电平转换(TTL、Vcc…),极性转换,并串转换等;⑸产生和提供联络、控制等信号:保证数据传输的有效和可靠。
四、程序控制下的IO有几种方式?⑴无条件传送方式的前提:有统一时钟信号管理的同步方式也称作无条件传送方式,或设备具有可随时接收、提供数据的能力,因而程序(主机)无需查看外设的状态(条件),随时作输入或输出操作。
⑵条件传送方式(查询方式):所谓程序查询就是在程序控制方式下进行数据传送。
在写程序时,把查询指令写在程序中,微处理器执行该条指令,去读I/O接口中一个反映接口状态的寄存器,当满足数据传送条件的情况下,状态寄存器会呈现一定的状态。
如果该状态寄存器为允许传送,就可以进行数据传输了五、中断工作方式有哪些不足?首先,在整个中断处理过程中都是需要CPU参与。
其次,在中断方式下,每申请一次中断,都需要进入中断的应答(响应)周期,重复进行现场保存现场恢复等过程。
在需要进行大量数据传输的情况下,地址增1和计数器减1都需要执行程序来实现,中断控制方式显然是效率太低。
2022年北京理工大学计算机科学与技术专业《计算机组成原理》科目期末试卷A(有答案)
2022年北京理工大学计算机科学与技术专业《计算机组成原理》科目期末试卷A(有答案)一、选择题1、关于LRU算法,以下论述正确的是()。
A.LRU算法替换掉那些在Cache中驻留时间最长且未被引用的块B.LRU算法替换掉那些在Cache中驻留时间最短且未被引用的块C.LRU算法替换掉那些在Cache中驻留时间最长且仍在引用的块D.LRU算法替换掉那些在Cache中驻留时间最短且仍在引用的块2、容量为64块的Cache采用组相联映射方式,字块大小为128个字,每4块为一组。
如果主存为4K块,且按字编址,那么主存地址和主存标记的位数分别为()。
A.16,6B.17,6C.18,8 D .19,83、在定点机中执行算术运算时会产生溢出,其根本原因是()。
A.主存容量不够B.运算结果无法表示C.操作数地址过大D.栈溢出4、ALU属于()。
A.时序电路B.控制器C.组合逻辑电路D.寄存器5、并行加法器中,每位全和的形成除与本位相加两数数值位有关外,还与()有A.低位数值大小B.低位数的全和C.高位数值大小D.低位数送来的进位6、在链式查询方式下,若有N个设备,则()。
A.只需一条总线请求线B.需要N条总线请求线C.视情况而定,可能一条,也可能N条D.以上说法都不对7、在下面描述的PCI总线的基本概念中,不正确的表述是()。
A.PCI总线支持即插即用B.PCI总线可对传输信息进行奇偶校验C.系统中允许有多条PCI总线D.PCI设备一定是主设备8、假定机器M的时钟频率为200MHz,程序P在机器M上的执行时间为12s。
对P优化时,将其所有乘4指令都换成了一条左移两位的指令,得到优化后的程序P。
若在M上乘法指令的CPl为102,左移指令的CPl为z,P的执行时间是P”执行时间的1.2倍,则P中的乘法指令条数为()。
A.200万B.400万C.800万D.1600万9、在计算机系统中,表明系统运行状态的部件是()。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一题一直各个齿轮数分别为:Z1 =100,Z2 =101,Z2’=100,Z3=18,Z3’=100,Z4=36,Z’4=35,Z5=28,B轴转速n B=1000转/分,方向如图,求H的转速n H的大小与方向。
二题一对正常齿制渐开线外啮合标准直齿圆柱齿轮蠢传动,一直两轮齿数Z1=25,Z2=35,标准中心距a=120mm,分度圆压力角α=20°
1、计算
@ 两轮的传动比i12,若齿轮1为原动件,该传动实现增速还是减速?
@ 齿轮2的模数m2,分度圆直径d2,齿根圆直径d f2,节圆半径r2’,齿顶圆半径r a2,分度圆上的齿距p2,基圆上的齿距p b2这些参数中,哪些与和此轮1的相同?
2、若实际中心距a’=122mm,则该对齿轮的传动比、重合度是否发生变化?为什么?
三题计算如图所示机构的
自由度,并在图上标出使机构有确
定运动是的原动件。
若含有复合铰
链,局部自由度,虚约束等情况时
必须一一指出。
四题某机械系统以其主轴为等效构件,已知主轴稳定运转一个周期6π内的等效阻力矩Mer的变化情况如图所示,平均角速度ωm=40rad/s,等效驱动力矩Med为常数,许用运转不均匀系数[δ]=0.04,忽略飞轮以外机构的转动惯量,
计算:
1、等效驱动力矩Med
2、装在主轴上的飞轮
转动惯量J f
五题某曲柄摇杆机构如图示意,曲柄等速转动,摇杆CD的左右两个极限位置与机架见的夹角分别为60°和120°,设摇杆CD长为30mm,要求当摇杆处于左极限位置时机构的传动角γ=90°。
请确定:
1、曲柄AB和连杆BC的长度;
2、该机构有无急回特性,为什么?
判断题
1、一对平行轴外啮合斜齿轮圆柱齿轮传动的正确啮合条件是两个齿轮的法面压力角相等,法面模数相等
2、死点位置和自锁机构都不能运动,他们的引起原因相同。
3、动平衡试验时,无论刚性转子上有多少个不平衡质量,分布在几个平面内,都可以通过在选定的两个平衡基面上各加一个适当平衡质量的方法是转子达到动平衡。
4、从动件的常用运动规律不一定都有柔性冲击。
5、标准直齿轮和变位直齿轮要想在加工时都不出现根切现象,必须是齿轮的齿数大于17。
6、若已知一个构件上两点的速度后,需求在其上第三点的速度是,可以用影响法。
填空
1、作用在与机架组成转动副的构件上的总驱动力位于摩擦元以外时,该构件作__________运动(等速、加速、减速)
2、在铰链四杆机构中,当最短杆与最长杆长度之和大于其他两构件长度之和时,
__________获得双摇杆机构。
(只能、不能、可能)
3、斜齿圆柱齿轮在__________面上具有标准参数(如模数、压力角等)。
模数m 应取标准系列值,模数的单位是__________
4、其他条件不变,当凸轮基圆半径增加时,凸轮机构的压力角会__________,这样,机构的效率会__________
5、设某及其Ⅰ轴的转速为400转/分,Ⅱ轴的转速为800转/分,若以Ⅰ轴为等效构件,则Ⅱ轴的等效转动惯量是Ⅱ轴自身转动惯量的__________倍
6、用于垂直交错的两轴间的蜗轮蜗杆机构,若蜗杆的旋向为左,则蜗轮的旋向__________为左。
(一定、一定不、不一定)
7、轮系中对传动比大小不起作用,只改变从动轮回转方向的齿轮称为__________。
自由度为2的差动轮系,必须给定__________个原动件,才能有确定的输出运动。
8、速度影响可用于对机构中的__________进行速度分析。
(一个构件、整个机构、相邻两个构件)
9、一个偏置曲柄滑块机构的极位夹角θ__________零,则该机构的行程速比变化系数K ____ 1,说明该机构__________(有、无)急回运动。
10、若两个机构瞬心处的绝对速度为零,那么这个瞬心一定是__________瞬心。
简答题
1、刚性转子的静平衡和动平衡在平衡计算时有何不同?各自的平衡条件是什么?。