水位传感器自动测试系统及误差分析
地下水文测量中的流速计算与误差分析要点

地下水文测量中的流速计算与误差分析要点地下水文测量是一项重要的水文学研究领域,旨在了解地下水的分布、流动规律和水质情况。
在地下水流速计算中,准确测量地下水的流速是至关重要的。
本文将探讨地下水文测量中流速计算与误差分析的要点。
一、地下水流速计算方法地下水流速的计算是地下水文测量中的重要环节,常用的方法有三种:测流站点法、标板法和示踪法。
1. 测流站点法测流站点法通过在地下水流动方向上布设多个测流站点,并测量各站点的水位变化来计算地下水流速。
这种方法适用于流速较低的地下水流动区域,但需要长时间观测和大量测量数据的支持。
2. 标板法标板法是通过在地下水流动区域埋设带有标志物的标板,并记录标板在一段时间内移动的距离来计算地下水流速。
这种方法适用于流速较快的地下水流动区域,但对标板的加工和安装要求较高。
3. 示踪法示踪法是通过向地下水中添加示踪剂,在一段时间内监测示踪剂浓度的变化来计算地下水流速。
这种方法适用于地下水流速计算中的大范围和长时间的研究,但示踪剂的选择和浓度监测要求较高。
二、地下水流速计算误差分析在地下水文测量中,流速计算的准确度直接影响到研究结果的可靠性。
误差来源主要包括观测误差、仪器误差和模型误差。
1. 观测误差观测误差是由于实际测量过程中的人为操作或环境条件引起的误差。
例如,水位测量中使用的水位计的精度、读数的准确性以及观测点的选取等,都会对流速计算结果产生一定影响。
减小观测误差的方法包括严格的操作规范、提高观测仪器的精度和减少误差来源等。
2. 仪器误差仪器误差是由地下水流速测量仪器本身的性能不准确或稳定性差引起的误差。
例如,传感器的灵敏度、测量仪器的插入深度与水位变化的关系等都会对测量结果的准确性产生影响。
减小仪器误差的方法包括仪器校正、选择合适的测量仪器以及定期检查和维护等。
3. 模型误差模型误差是由于对地下水流动规律的理解不准确或模型假设不符合实际情况引起的误差。
地下水流动是一个复杂的过程,涉及到多种因素的综合作用,对流速的计算模型的选择和参数的确定都会影响最终的结果。
双色水位计的毛病分析跟处理

双色水位计的毛病分析跟处理简介双色水位计是一种用于液体水位检测的仪器,通过测量液位的两个颜色上方的反射光并计算其高度差来确定液位高度。
该仪器具有结构简单、测量精度高、易于使用等优点,在工业和实验室中得到了广泛应用。
然而,在使用双色水位计时也存在一些常见的毛病,本文将着重对这些毛病进行分析,并给出有效的处理方法。
毛病分析液位误差在使用双色水位计进行液位检测时,常见的毛病之一就是液位误差。
这是由于双色水位计在检测液位时,需要考虑液体本身的折射率,而不同的液体具有不同的折射率。
当试样液体的折射率与双色水位计所设计的液体不同时,就会导致误差。
此外,还有因外界因素干扰导致的液位误差,例如温度、震动等。
换算错误双色水位计在测量液位时,需要将颜色上方的反射光高度差转换成液位高度。
为此,需要知道液体的密度和双色水位计的常数。
然而,如果密度或常数不正确,就会导致液位计算错误。
故障检测在使用双色水位计时,还有一种常见的问题是故障检测。
这是由于组装或使用过程中发生的机械或电路故障引起的,例如光电传感器的损坏、线路断开等等。
如果双色水位计出现故障,则无法准确测量液位高度,从而影响生产过程或实验结果。
处理方法液位误差的处理解决液位误差问题的关键在于正确选择双色水位计使用的液体。
在选择液体时,应尽可能选择折射率与试样液体相同的液体。
如果折射率无法匹配,则可以根据实际情况进行手动校准来纠正液位误差。
另外,可以通过安装防震支架和保护罩等辅助设备来减少外部干扰。
换算错误的处理正确设置液体的密度和双色水位计的常数是解决换算错误的重要措施。
调整密度和常数时,可以通过校准器具来进行。
如果不确定密度或常数,请查阅双色水位计的使用说明书或联系生产厂家获取帮助。
故障检测的处理如果双色水位计出现故障,应及时进行检修或更换。
如需要更换部件,应注意修理或更换时的部件相容性。
在更换前应了解双色水位计的设计原理,避免出现因设计不当或错误使用而导致的问题。
基于单片机的水位检测控制系统设计

基于单片机的水位检测控制系统设计学院:专业:姓名:指导老师:信息学院自动化刘翔学号:职称:0901********盛珣华曹宇教授助理工程师中国·珠海二○一三年五月诚信承诺书本人郑重承诺:本人承诺呈交的毕业设计《基于单片机的水位检测控制系统设计》是在指导教师的指导下,独立开展研究取得的成果,文中引用他人的观点和材料,均在文后按顺序列出其参考文献,设计使用的数据真实可靠。
本人签名:日期:年月日基于单片机的水位检测控制系统设计摘要随着社会和科技的进步,以及人们的生活标准水平逐步的提高与发展,方便的全自动控制系统生活的开始逐步进入到我们的生活,单芯片微型计算机发展是其中的一个重要分支,具有高可靠性,高性能价格比,低电压,低功耗等优点,以单片机为核心的自动化控制系统已经赢得了广泛的应用范围。
本设计是基于单片机的水位检测控制系统设计。
设计系统的目的在于应用单片机的自动运行技术,使得水塔中的水位始终保持在一定范围内,以保证连续正常的供水。
本设计是以AT89C51单片机为核心部件的水塔水位检测控制仿真系统设计的,用以检测水位并进行控制、处理以及报警功能,并在Proteus仿真软件环境中仿真测试。
结果表明,设计的系统具有良好的检测和控制功能,方便移植性和可扩展性。
关键词:水位控制单片机报警Based SCM the water level detection control system designAbstracWith the social and technological progress, as well as the level of people's standard of living gradually improve with the exhibition, and the convenience of automatic control system for the beginning of life gradually into our lives, single-chip microcomputer development is an important branch,the advantages of high reliability, high performance and low cost, low-voltage, low-power microcontroller as the core of the automation control system has won a wide range of applications.The title of the graduate design microcontroller-based water level detection and control system design, three metal rods into the water used to detect the signal, the conductivity of the water, can see that the water level changes. Under normal circumstances, the water level should be kept within a certain range changes, the water level does not exceed the stipulated upper and lower limits, in the event of a system failure, should be promptly cut off electrical power, and there should be sound and audible alarm signals of the light-emitting diode. Design System aimed the application microcontroller run automatically, so that the water level in the water tower always maintained within a certain range in order to ensure the continuous normal water. The design is based on AT89C51 microcontroller as the core components of the water tower water level detection and control simulation system designed to detect water level control, processing, and alarm functions, and Proteus simulation software environment simulation testing. Experimental results show that the design of the system has a good detection and control functions, portability and scalability.Keywords:Level controlmicrocontroller alarm目录1前言 (1)1.1.本设计在国内发展概况 (1)1.2国外发展概况 (1)1.3设计目的 (2)1.4设计意义 (2)2总设计 (2)2.1设计的技术要求 (2)2.2应解决的主要问题 (3)2.3设计原理 (3)2.4方案选择 (3)2.5给定参数 (5)2.6整体方案设计 (5)2.7优点和特色 (6)2.8创新点 (7)2.9系统运行过程可能存在的问题 (7)2.9.1现场数据经过DTU发送后在远程监控室接收不到 (7)3硬件介绍 (7)3.1光电耦合器4N25 (7)3.1.1工作原理 (7)3.1.2主要性能 (8)3.1.3引脚图和引脚名称 (8)3.1.4极限参数 (8)3.2单片机芯片STC90C516RD+ (9)3.2.1芯片简介绍 (9)3.2.2芯片STC90C516RD+引脚 (9)3.2.3主要性能 (10)3.3电磁继电器 (11)3.4蜂鸣器 (11)3.5远程通信模块DTU (12)3.6液位高度传感器 (12)4组态软件 (13)4.1组态概况 (13)4.2组态设计 (13)5软件设计 (17)5.1Keil软件 (17)5.2程序方框图 (17)5.3程序设计 (18)5.4I/O口的分配 (18)5.5子程序 (18)5.5.1延时子程序 (18)5.5.2报警子程序 (19)5.5.3初始化子程序 (20)5.4主程序 (20)6结论 (22)参考文献 (23)谢辞 (24)附录 (25)程序代码 (25)1前言1.1.本设计在国内发展概况国产水位监测仪主要有浮筒式水位仪、压力传感器式水位仪、超声波式水位仪等,在功能齐全、性能稳定等方面,虽然与国际上先进的同类型产品存在一定差距,但是却可以基本满足水位监测及控制的需要。
水深测量误差来源及分析
水深测量误差来源及分析水深测量误差来源及分析摘要随着社会的发展,陆地不可再生资源的减少,围海造地、港口开发、水下资源探测开发等工程建设项目层出不穷,基于此的水深测量项目也越来越多,对水深测量速度,精度等方面要求也越来越高。
水下测量系统已愈来愈被广泛采用。
相应的测量误差也不可避免,本文简述了现代海洋水深测量的基本特点及误差产生原因,并对提高测量精度提出了一些建议。
关键词:水深测量、误差、精度分析中图分类号: P716+.11 文献标识码: A 文章编号:1 水深测量系统组成及基本原理1.1 系统组成水深测量系统由基站和测船移动站、测深仪、计算机和内业处理系统构成,基站和移动站由GPS接收天线、电台天线、主机、数据传输组成:测深仪由换能器、主机和数据传输部分组成。
1.2 测深原理图2-1测深系统基本原理如图2-1,常规测深法是利用水准测量方法,计算水面与深度基准面之间的关系,用回声定位法测出水面到泥面距离,计算出泥面高程。
无验潮测深法是利用GPS接收天线中心获得测点的位置和基准面的关系,与常规测深法相同,量取GPS接收天线中心到测深仪换能器距离以及测深仪换能器测得与泥面的距离,得出泥面高程。
测深仪换能器连续的向水下发射声波,利用回声定位的原理测得声波在水下传播的时间,从而得到相应位置水深值,经过测量软件处理,可得到水下地形特征点高程。
水下地形测量包括定位和水深测量。
就目前水下地形测量主流技术而言,定位采用的是GPS定位模式,而水深测量采用的是回声测深仪。
这样就可以确定测点的高程:式中,为水底高程,为水面高程,为测量水深,为换能器的静吃水。
2 水深测量流程3 误差分析现代海洋测量误差来自多个方面,主要包括测深误差、定位误差、潮位改正误差、测量环境误差。
3.1测深误差,根据回声测深仪工作原理,水面至水底的深度是通过声波传递时间计算得出。
其数学公式为:H=Cm*Δt/2式中Cm为平均声速,Δt 为发射与接收信号时间差。
基于stm32的简易水情检测系统设计

基于stm32的简易水情检测系统设计目录第1章绪论 (4)1.1课题研究的目的及意义 (4)1.2课题研究的国内外发展现状 (4)1.3本课题的主要内容 (5)1.4论文结构安排 (6)第2章PH传感器检测模块 (7)2.1 PH检测传感器的组成 (7)2.1.1 PH复合电极 (7)2.2.2 PH传感器 (7)2.2 PH传感器的工作原理图 (8)2.3 PH工作原理 (8)第3章系统整体设计 (11)3.1系统方案论证 (11)3.1.1微处理器的论证与选择 (11)3.1.2液晶显示模块的论证与选择 (11)3.1.3超声波检测模块的论证与选择 (12)3.1.4温度检测模块的选择 (12)3.1.5串口通信的论证与选择 (12)3.2系统电路设计的指标 (13)3.2.1系统框架 (13)3.2.2超声波测距子系统框图 (13)3.2.3 PH检测子系统框图 (13)3.2.4温度检测子系统框图 (13)第4章系统硬件电路的构成 (14)4.1 STM32F407VET6最小系统 (14)4.2水位传感器 (14)4.3温度传感器 (16)4.4 RS-232串口通信模块 (17)4.5液晶显示模块 (17)第5章系统软件的设计 (18)5.1程序编程软件 (18)5.2程序编程软件 (18)5.2 .1程序功能描述 (18)5.2 .2程序的软件设计思路 (19)5.3 ADC程序编程软件 (19)5.4温度采集模块编程 (19)5.5水位采集模块编程 (20)5.6 PH值采集模块编程 (20)5.7显示模块编程 (21)5.8串口通信模块编程 (22)第6章系统调试与数据测量 (23)6.1测试条件与仪器 (23)6.1.1测试条件 (23)6.1.2测试仪器 (23)6.2测试数据及结果分析 (23)6.2.1测试数据 (23)6.2.2测试分析与结论 (24)结语 (25)第1章绪论1.1课题研究的目的及意义自我国改革开放以来,水情检测系统设计获得越来越多其他行业的关注和重视。
水深测量误差分析与改正方法探析

水深测量误差分析与改正方法探析1影响测量精度的因素1.1潮汐因素在水深测量中,当所测的水深值订正至规定的深度基准面时,不同时间段所测量的同一测线,检查水深记录并无操作不当等原因,但其水深却存有系统的差异现象,通常情况下,这种误差便是潮汐因素造成的。
水位观测是为了保证将所测的水深订正至规定的深度基准面。
水位观测是通过永久性验潮站或临时验潮站来完成的。
一般情况下,在海洋近岸工程所做的大比例尺水深地形测量工作,此海区的潮汐性质已经确定。
但是,如果水深测量的工作区不处在验潮站的有效服务区范围内,就不能保证在同一时间在工作区和验潮站所测得的水位涨落基本相同和达到规定的水深测量要求的精度。
为此,《海洋工程地形测量规范》中规定,验潮站布设的密度应能控制全测区的潮汐变化。
相邻验潮站之间的距离应满足最大潮高差小于等于0.4m,最大潮时差不大于1h,且潮汐性质应基本相同。
在常规的水深测量过程中,该规定是实施验潮应满足的基本条件。
但是沿岸港湾频繁出现假潮现象,这会给水深地形测量中的水位改正带来困难,使交叉点水深不符值超限。
测量工作期间出现假潮,局部潮位发生变化,这一海洋现象极易使测深工作受到影响。
如1987年的国家重点项目——神木煤外运深水港选址过程中,曾因测量时间段的不同而同点水深竟差0.5m以上,造成测量工作再次返工。
为了避免这一海洋现象对水深地形测量水位改正的影响,测区内应安放水位计与测区外验潮站同步验潮,或根据工作区的情况,在条件许可的情况下临时验潮站设于工作区近岸。
1.2气象因素航行中的船只因受风向、风速的影响,其船行姿態随时发生变化。
水深测量时,船只航行是按照预先设计好的测线工作的,当风力垂直测线吹来,船只受风面极易造成侧向不同程度的倾斜。
安装在船舷的测深仪换能器因船只不同程度的倾斜造成了换能器吃水的深度不断变化,引起水深测量数据的差异。
这种水深测量数据的差异具有规律性,往往造成图载水深随测线航向往返而变化,船只往测数据偏深而返测数据偏浅,或反之。
雨水情自动测报系统常见故障分析及维护措施

雨水情自动测报系统常见故障分析及维护措施摘要:维护工作是雨水情自动测报系统能否长期处于良好运行状态的重要保证,做好系统的维护工作,要熟悉系统硬件方面的故障和维护方法,也要掌握软件方面的维护内容。
系统的安全运行和维护是一项长期、持久、面广、点多的工作。
关键词:雨水情自动测报系统;故障;维护前言随着水文事业的发展,雨水情自动测报系统已呈普及之势,极大地满足了水文、防汛等工作的需要。
这类系统就目前的国内技术而言,基本实现了无线数字远传,数据传输方式从原先的“应答式”改为“自报式”,系统结构基本相同。
系统由上至下,一般由中心站、分中心站、中继站和遥测终端站组成[1]。
硬件设备由于生产厂家不同,设备内部电路略有差别,但整体上这类设备的部件构成、内部构造及呈现的功能基本相同,因此,系统的维护管理具有很大共性。
现就雨水情自动测报系统常见故障及维护措施介绍如下,供参考。
1 系统概述雨水情自动测报系统能否长期处于比较良好的运行状态,首先要求我们必须先对系统有一个基本的认识[2]。
该系统是综合运用计算机、电子、通信、遥感、水文、气象等多学科技术,主要工作是完成对江河、水库和流域的降雨、水位(潮位)、流量、蒸发、闸门启闭等水情信息的实时采集、传输、处理、存储管理和发布的信息系统,通过计算机等专用设备及应用软件,准确地进行自动监测、预报、调度,并通过图形、图象显示以及各类数据表格的输出,为各级指挥人员提供迅速、准确的信息。
XX水文局雨水情自动测报系统采用了北京金水燕禹研发的YCZ-2A-101型遥测终端,主要由水位计、雨量传感器、数据采集终端(RTU)、数据传输信道、通信设备、应用软件、数据处理计算机和供电电源等构成,共计1个中心站、42个遥测站。
实现了雨量、水位信息的自动采集、存贮,并通过通信信道实时定时自动传送至中心站,实现了“有人看管、无人值守”的管理模式。
中心站能实时接收遥测站雨量水位和电压数据,对接收到的数据进行处理、合理性检查,显示、打印各种数据报告等。
精密水位传感器测试系统

高校理科研 究
精窑 水 位 传感 器 测试 系 统
江苏 畜牧 兽 医职 业技 术 学院 徐 冬 寅 成 维莉
[ 摘 要] 本文针 对洗衣机 用水位传感 器质量检测 中存在的 问题, 开发 了基于 C N( nrUr ra t r). 的精 密水位传 感器 A Co t e A e Ne k,线 o wo  ̄ 检测系 。 统 在上位计算机 与前端测控模块之 间的通信 中, 采用现场 总线 C N 网络技 术。由于实现 了系统冗余 , 统具有安全可靠、 A 系 功能完善 、 操作 简便、 性能价格比高等优 点, 实现 了洗衣机 用水位传感器检 测的 自动化 , 成功 取得 了较好 的经济效益。 [ 关键词 ] 传感器 冗余 现场总线控 制系 ̄( S 局域控制网(A ) F ) C C N
框图如图 l Байду номын сангаас。 所
水位传感器输 出脉 冲信号频率的测量。单片机的定时 / 计数器 一 l 在规定 的时间内( 1 对 脉冲信 号进行计数, l 时 间到后 , 如 s ) 则 s 定时 , 计 数器 一 所计脉冲数就是所要测量的脉冲信号频率 的大小。 1 水位高度的测量 主要 是通 过编码器来完成, 编码器 的 A相信号送 至单片机的外部中断 一 ,在外部中断 一 处理程序中对 A相脉冲进行 1 1 计数 ( 若此时 B相脉冲为高 电平 , 则计 数增 1 若此时 B相脉 冲为低电 ; 平, 则计数减 1 。 )当电动机转动时, 编码器脉 冲计数值就会不断累加。 通 过传 动机构 的合 理设置, 每个脉 冲对应 02 mm的水 位高度变化, .5 那么 所计 数的编码器脉冲数值经过编程计 算, 就可得 出实际水位 高度的变
电路
I整形 - ● —
如何进行高精度的水位测量

如何进行高精度的水位测量高精度的水位测量一直是科学研究和工程应用中的重要课题之一。
无论是对于水资源管理、洪水预警还是海洋科学研究,准确地测量水位都具有重要的意义。
本文将探讨如何进行高精度的水位测量,从测量原理、仪器设备到数据处理和误差分析等方面进行论述。
为了进行高精度的水位测量,首先需要了解测量原理。
常用的水位测量原理之一是基于压力变化的测量。
通过将一个浸入水中的传感器与大气相连,通过测量传感器所受到的压力,可以反推得到水位的高度。
这种方法具有较高的精度和稳定性,适用于不同深度和介质的水位测量。
其次,选择合适的仪器设备也是进行高精度水位测量的关键。
传感器的选择对于水位测量的精度和准确性至关重要。
现代的水位传感器采用了微电子技术和物理传感技术相结合的设计,可以实现微小压力的高精度测量。
此外,传感器的稳定性和耐腐蚀性也是选择的考虑因素。
针对不同测量需求,还可以选择悬挂式或底部压力传感器等不同类型的水位传感器。
在数据采集方面,高精度的水位测量需要考虑多种因素。
首先是采集频率的选择。
对于不同场景,采集频率的选择不同。
例如,对于水位变化较快的河流或湖泊,需要选择较高的采集频率以捕捉瞬时变化;而对于海洋或大型水库等场景,可以降低采集频率以减少数据存储和处理的压力。
此外,还需要确保数据采集的连续性和稳定性,避免由于传感器故障或外界干扰等原因导致数据异常或间断。
数据处理是高精度水位测量的另一个重要环节。
在进行数据处理时,需要考虑数据的滤波、校正和校准等处理过程。
滤波可以去除数据中的噪声和干扰,提高测量的信噪比。
校正可以消除传感器本身的误差和非线性,提高测量的准确性。
校准则是通过与其他可靠的水位测量仪器进行比较,确定传感器的偏差并进行修正。
这些处理过程可以提高测量结果的可靠性和准确性。
此外,在进行高精度水位测量时,还需要注意误差的分析和评估。
误差来源包括传感器本身误差、环境因素和人为因素等。
传感器本身误差源于其设计制造的不完美性,环境因素包括温度、湿度等的变化对传感器性能的影响,而人为因素则包括安装不当、使用不当等因素。
水文流量测验水深测量误差

含学术|ACADEMIC水文流量测验水深测量误差◎蒋国民仇东山刘铭济南市水文局►摘要:以济南市兴济河机床二厂水文站项目实例为研究背景。
对水文流量测验水深测量误差内容进行探究,先是分析了河道断面测量误差的来源及控制内容。
其次详细论述流速测验的误差来源及控制要点,希望论述后,可以给此类项目提供参考。
►关键词:水文流量测验水深测量误差1.项目简述机床二厂水文站是济南市兴济河上游关键控制站,建于2014年,集水面积67.4KM2,监测断面上下游河道规整,该站担负着在汛期对下游4KM处的腊山分洪工程提供分洪决策的水文监测数据,该站属于山洪季节性河流,河道来水主要集中在每年的7-9月份主汛期,每逢大雨,水势陡涨陡落,水位、流量变化较快,监测数据极易出现误差。
机床二厂水文站目前釆用雷达水位计监测水位,电波流速仪人工测验流量。
机床二厂大断面图如图1。
测深、测速垂线分布起点距3、7、11、15、19、23、27m共计7条该水站是兴济河上游的关键控制站,主要的作用就是水位、流量等部分的测定和报讯,给当地河流下游的防洪抗旱和水库合理的使用提供良好的基础条件。
经过资料分析,水流量关系图存在着一定的偏差,导致了流量计算数据存在较大的偏差。
2.水道断面测量误差的来源及控制水道断面测量数据偏差主要是由于测深垂线设置数目、水深数据和水面宽度等。
2.1测深垂线布设根据数据误差传递角方面来分图1析,水深测量的偏差直接传递给水道面积,然后会影响流量。
在断面平均速度达到规定的数据之下,面积所造成的误差会导致流量产生相同的误差。
为了使得断面数据的精确度,就要通过使用较多的垂线来进行河床变化转折点的控制。
从目前的水利工程标准规范中确定,在进行测深垂线数目的精简应该按照精密探测的数据资料来进行,精密测深的资料中垂线的布置应该不能少于精测中布置垂线的2倍。
按照该标准的要求,该水站在2014年进行密测深误差试验。
从资料的精简分析,精简之后所测深垂线数量相对平均差和相对标准差详见表1。
刘庄闸水文站在线自动雷达波测流系统比测分析

关 测 流 系 统 人 工 控 制 临 时 增 加 测 流 次 数 ,查 看 、修
(
3)比测 方 法。在 相 同 时 间 段 内 均 采 用 流 速 面
(
4)比测数 据。 自 2022 年 6 月 至 2023 年 8 月
刘庄闸水文站在线自动雷达波测流系统比测分析———刘
豪
严芳芳
刘庄闸水文站在线自动雷达波测流系统比测分析
刘
豪
严芳芳
菏泽市水文中心,山东 菏泽 274000
摘要:在线自动雷达波流量监测系统中的流量系数是影响水文测验计 算 结 果 的 重 要 因 素 之 一,精 准、高
效地利用流量系数是提高洪水测验数据精度的关键,通过对刘庄闸水文站在线自动 雷 达 波 测 流 系 统 的 比 测
程 服 务 器 ,在 后 台 处 理 后 ,计 算 相 应 流 量 ,能 够 随
时 实 现 流 量 在 线 监 测 ,及 时 了 解 和 掌 握 河 道 水 情
变 化 ,大 大 降 低 水 文 测 验 人 员 的 劳 动 强 度 和 测 流
风险。
2.
3 比测情况
(
1)比测 断 面。刘 庄 闸 水 文 站 流 速 仪 测 流 断 面
比测流量范围(m3/s)
1.
74~65.
6
表 2 雷达波与流速仪测流水位—流量关系线比测数据
时间
断面水位
流速仪测流
雷达波测流
(m)
(m3/s)
(m3/s)
1.
85
1.
25
2022
7
14
41.
34
2022
水箱液位传感器测量精度标准
水箱液位传感器测量精度标准水箱液位传感器是一种常见的测量设备,用于监测水箱中的液位变化。
它的测量精度对于确保水箱的正常运行至关重要。
本文将探讨水箱液位传感器的测量精度标准,并分析其对水箱运行的影响。
首先,我们需要了解水箱液位传感器的工作原理。
水箱液位传感器通常采用压力传感技术或超声波技术来测量液位。
压力传感技术通过测量液体对传感器的压力来确定液位高度,而超声波技术则利用超声波的传播时间来计算液位高度。
这两种技术都有其优缺点,但无论采用哪种技术,测量精度都是至关重要的。
测量精度是指传感器输出值与实际液位值之间的误差。
一般来说,测量精度越高,传感器的输出值与实际液位值之间的误差就越小。
测量精度的标准通常以百分比或毫米为单位。
例如,一个测量精度为±1%的水箱液位传感器,意味着其输出值与实际液位值之间的误差不超过液位的1%。
水箱液位传感器的测量精度对于水箱的运行至关重要。
首先,它可以确保水箱的水位控制在合适的范围内。
如果传感器的测量精度不高,可能会导致水箱的水位过高或过低,从而影响水箱的正常运行。
例如,如果水箱的水位过高,可能会导致水箱溢出,造成浪费和水资源的浪费。
相反,如果水箱的水位过低,可能会导致供水不足,影响正常生活和工作。
其次,水箱液位传感器的测量精度还可以提供准确的数据用于水箱的管理和维护。
通过监测水箱的液位变化,可以及时发现水箱的异常情况,如漏水或堵塞等问题。
这样可以及时采取措施修复问题,避免进一步损坏水箱或造成其他不必要的损失。
此外,水箱液位传感器的测量精度还可以提高水箱的能源利用效率。
通过准确测量水箱的液位变化,可以根据实际需求来控制水泵的运行。
这样可以避免水泵的过度运行或不足运行,从而节约能源和降低运行成本。
然而,要确保水箱液位传感器的测量精度达到标准,需要注意以下几点。
首先,传感器的选择非常重要。
不同品牌和型号的传感器具有不同的测量精度和稳定性。
因此,在选择传感器时,应根据实际需求和预算来选择合适的传感器。
水位传感器的研究与应用
水位传感器的研究与应用摘要水位传感器作为水利与环境保护监测的关键技术装备,对水资源的合理配置与环境保护的长远规划至关重要。
本研究深入挖掘了水位传感器的运作机理、分类及其技术特点,并广泛探讨了其在水利监控、环境保护及更多领域的实际应用案例。
研究结果显示,新开发的水位传感系统展现出卓越的测量精确度与稳定性,即使在复杂多变的自然条件下,也能精确捕捉水位动态,为各类工程实践提供了坚实的监测支撑。
本研究强调,科技进步与应用需求的双重驱动下,水位传感器技术正不断向更高精度、更强稳定性和深度智能化迈进。
特别是物联网与大数据技术的深度融合,正引领水位传感器向智能化自动化控制领域跃进,极大增强了水资源管理与环境监测的效率与精确度。
此外,多功能集成与微型化设计趋势的兴起,预示着未来水位传感器将具备更广泛的适用性和灵活性,能在更多样化的场景中施展拳脚。
新材料与新制造工艺的创新应用,则为传感器的长期可靠性与耐用性加固了基石,为其在更广阔领域的普及与深入应用铺设了道路。
关键词:水位传感器;水利监测;环境监测;测量精度;稳定性;智能化控制;多功能集成;新材料应用目录摘要 (1)第一章引言 (3)1.1 研究背景和意义 (3)1.2 国内外研究现状 (4)1.3 研究方法和创新点 (5)第二章水位传感器技术理论基础 (7)2.1 水位传感器的工作原理 (7)2.2 传感器类型及其特点 (8)2.3 传感器技术发展趋势 (9)第三章水位传感器系统设计 (11)3.1 传感器选择与设计 (11)3.2 数据采集与处理模块 (12)3.3 系统集成与测试 (12)第四章水位传感器的应用实例 (14)4.1 水利监测应用 (14)4.2 环境监测应用 (14)4.3 其他领域的应用 (15)第五章实验与分析 (17)5.1 实验设置与方法 (17)5.2 实验结果与数据分析 (18)第六章结论与展望 (19)6.1 研究结论 (19)6.2 研究展望 (19)第一章引言1.1 研究背景和意义水位传感器作为现代水利工程建设与环境监控的核心技术工具,对确保水资源的高效管理与环境的可持续保护发挥着至关重要的作用。
水深测量误差来源及分析

水深测量误差来源及分析摘要随着社会的发展,陆地不可再生资源的减少,围海造地、港口开发、水下资源探测开发等工程建设项目层出不穷,基于此的水深测量项目也越来越多,对水深测量速度,精度等方面要求也越来越高。
水下测量系统已愈来愈被广泛采用。
相应的测量误差也不可避免,本文简述了现代海洋水深测量的基本特点及误差产生原因,并对提高测量精度提出了一些建议。
关键词:水深测量、误差、精度分析中图分类号: p716+.11 文献标识码: a 文章编号:1 水深测量系统组成及基本原理1.1 系统组成水深测量系统由基站和测船移动站、测深仪、计算机和内业处理系统构成,基站和移动站由gps接收天线、电台天线、主机、数据传输组成:测深仪由换能器、主机和数据传输部分组成。
1.2 测深原理图2-1测深系统基本原理如图2-1,常规测深法是利用水准测量方法,计算水面与深度基准面之间的关系,用回声定位法测出水面到泥面距离,计算出泥面高程。
无验潮测深法是利用gps接收天线中心获得测点的位置和基准面的关系,与常规测深法相同,量取gps接收天线中心到测深仪换能器距离以及测深仪换能器测得与泥面的距离,得出泥面高程。
测深仪换能器连续的向水下发射声波,利用回声定位的原理测得声波在水下传播的时间,从而得到相应位置水深值,经过测量软件处理,可得到水下地形特征点高程。
水下地形测量包括定位和水深测量。
就目前水下地形测量主流技术而言,定位采用的是gps定位模式,而水深测量采用的是回声测深仪。
这样就可以确定测点的高程:式中,为水底高程,为水面高程,为测量水深,为换能器的静吃水。
2 水深测量流程3 误差分析现代海洋测量误差来自多个方面,主要包括测深误差、定位误差、潮位改正误差、测量环境误差。
3.1测深误差,根据回声测深仪工作原理,水面至水底的深度是通过声波传递时间计算得出。
其数学公式为:h=cm*δt/2式中cm为平均声速,δt 为发射与接收信号时间差。
3.1.1声速改正声波在水中传播速度受水温及盐度影响而不同,一般按下列经验公式计算:c=1450+4.206t-0.0366t2+1.137(s-35)式中:c为平均声速, t为水温,单位0,s为含盐度。
基于单片机的水位检测与控制系统的研究与设计
摘要现代传感技术、电子技术、计算机技术、自动控制技术、信息处理技术和新工艺、新材料的发展为智能检测系统的发展带来了前所未有的奇迹。
在工业、国防、科研等许多应用领域,智能检测系统发挥着越来越大的作用。
随着社会的进步、生产工艺和生产技术的发展,人们对液位的检测与控制提出了更高的要求。
而新型电子技术微电子技术和微型计算机的广泛应用于普及,单片机控制系统以其控制精度高,性能稳定可靠,设置操作方便,造价低等特点,被应用到液位系统的控制中来。
本设计用液位检测集成芯片LM1042、A/D转换芯片A/D574A、继电器、水泵,以及AT89C51单片机作为主控元件的液位检测与控制的原理、电路及监控程序。
用LM1042液位检测集成芯片测量液位,具有测量精度高、速度快、可靠、稳定等优点;采用单片机来控制液位信息的采集,并且计算出真实液位值,通过运算判断是否超限报警,使检测与控制具有更高的智能性。
关键词:AT89C51;AD574A;液位检测;LM1402;超限报警;继电器;水泵.ABSTRACTModern sensing technology, electronic technology, computer technology, automatic control technology, information processing technology and new technology, new material for the development of the intelligent detection system development has brought an unprecedented miracle. In industry, national defense, scientific research and many other fields of application, intelligent detection system is playing the more and more major role. Along with the progress of the society, the production technology and production technology development, the people to the level of test and control put forward higher request. And the new electronic technology of microelectronics technology and microcomputer's widely used in popularity, single-chip microcomputer control system with its high control accuracy, high performance is stable and reliable, setting, convenient operation, cost low characteristic, has been applied to the liquid level control systems. This design with liquid level detection integrated chips LM1042, A/D converse.Keywords: AT89C51; AD574A; The liquid level detection; LM1402; Overrun alarm; Relay; Water pump.目录第一章绪论 (1)1.1水位检测技术的应用与发展 (1)1.2水位检测系统设计的意义 (1)1.3本设计研究的内容和方法 (1)第二章系统硬件设计 (3)2.1系统总体功能概述 (3)2.2核心芯片的选择 (4)2.3硬件原理图 (10)第三章系统软件设计 (15)3.1软件功能概述 (15)3.2主程序设计 (16)3.3定时器T0中断服务程序 (17)3.4A/D转换子程序 (18)3.5LED显示子程序 (18)第四章结论 (19)参考文献 (20)致谢 (21)附录 (22)附录一主程序代码 (22)附录二电路图 (26)附录三PCB版 (27)第一章绪论1.1 水位检测技术的应用与发展当今的工业领域中液位检测对许多自动控制方案来说都至关重要。
汽包水位偏差原因分析
汽包水位偏差原因分析1、汽包水位测量系统问题造成汽包水位偏差。
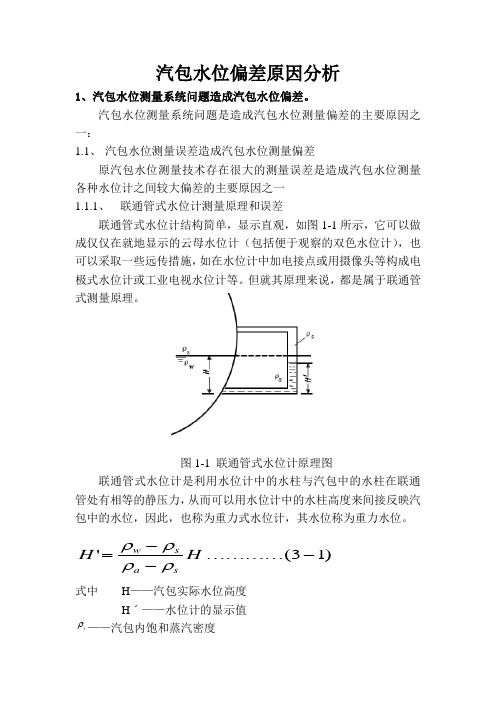
汽包水位测量系统问题是造成汽包水位测量偏差的主要原因之一:1.1、 汽包水位测量误差造成汽包水位测量偏差原汽包水位测量技术存在很大的测量误差是造成汽包水位测量各种水位计之间较大偏差的主要原因之一 1.1.1、 联通管式水位计测量原理和误差联通管式水位计结构简单,显示直观,如图1-1所示,它可以做成仅仅在就地显示的云母水位计(包括便于观察的双色水位计),也可以采取一些远传措施,如在水位计中加电接点或用摄像头等构成电极式水位计或工业电视水位计等。
但就其原理来说,都是属于联通管式测量原理。
图1-1 联通管式水位计原理图联通管式水位计是利用水位计中的水柱与汽包中的水柱在联通管处有相等的静压力,从而可以用水位计中的水柱高度来间接反映汽包中的水位,因此,也称为重力式水位计,其水位称为重力水位。
式中 H ——汽包实际水位高度 Hˊ——水位计的显示值ρs——汽包内饱和蒸汽密度ρw ——汽包内饱和水密度ρa——水位计测量管内水柱的平均密度由于水位计管内的水柱温度总是低于汽包内饱和水的温度,因此,ρa总是大于ρww ,水位计中的显示值总是低于汽包内实际水位高度,它的示值偏差:由(3-2)式可以看出,水位测量偏差与水位计管内水柱温度、汽包工作压力以及汽包内的实际水位等多种因素有关。
《二十五项反措》给出了参考值:就地水位计的正常水位示值和汽包实际零水位的差值△h2004年3月30日东北电科院利用朝阳电厂#2锅炉大修的机会,对汽包水位运行痕迹线进行实际检测:“实际汽包水位经常工作于设计汽包零水位上方140mm处,即汽包水位经常工作在设计零水位的正140毫米左右。
”1.1.2、差压式汽包水位计的原理和误差差压式水位计是通过把水位高度的变化转换成差压的变化来测量水位的,因此,其测量仪表就是差压计。
差压式水位计准确测量汽包水位的关键是水位与差压之间的准确转换,这种转换是通过平衡容器形成参比水柱来实现的。
水库水位测量的传感器选用与误差分析

水库水位测量的传感器选用与误差分析引言:水库作为水资源调节与储存的重要设施,在现代社会中扮演着至关重要的角色。
为了能够更好地掌握水库的水位情况,准确地测量水位成为了一项必要的工作。
而在测量水位的过程中,传感器的选用和误差分析则显得尤为重要。
本文将对水库水位测量传感器选用和误差分析进行探讨。
传感器选用:水库水位测量传感器的选用应该考虑多个因素,包括测量范围、精度、稳定性、适应环境等等。
传感器的选择应基于实际情况和需求来进行,以确保测量数据的准确性和稳定性。
在测量范围方面,传感器的测量范围应能够覆盖水库的实际水位变化范围,避免超出测量范围导致数据无法准确反映水位情况。
同时,传感器的测量范围应保证足够的安全裕度,以应对突发水位变化等情况。
对于精度要求高的水库,传感器的精度也是一个不可忽视的因素。
传感器的精度决定了测量数据的准确性,因此需要选择具有高精度的传感器。
一般来说,精度可以通过传感器的分辨率和重复性来衡量,分辨率越高,重复性越好,传感器的测量精度就越高。
稳定性是指传感器在长期使用过程中,测量数据的变化程度。
传感器的稳定性越好,测量数据的一致性就越高。
在水库水位测量中,为了获取准确的水位变化情况,传感器的稳定性非常重要。
因此,传感器的选用应考虑其长期稳定性,并进行相应的测试和分析。
适应环境是指传感器能否适应水库环境中的各种条件和因素,如水质、温度、湿度等。
水库环境复杂多变,传感器的选用应根据实际情况来选择适合的传感器。
例如,如果水库所处地区水质污染严重,可能需要选择具有防水和耐腐蚀能力的传感器。
误差分析:无论是哪种传感器,都有可能存在一定的测量误差。
对于水库水位测量传感器来说,误差分析是非常重要的,可以帮助我们更好地了解传感器的测量性能,减小误差的影响。
传感器的误差主要包括系统误差和随机误差。
系统误差是指由于传感器本身设计或制造过程中的缺陷或不足所导致的误差。
而随机误差是由于外界环境、干扰因素等原因导致的误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代计量测试1999年第3期水位传感器自动测试系统及误差分析
胡生清 左进 胡毅
(合肥工业大学精密仪器系,合肥 230009)
摘要:作为全自动洗衣机中重要组成部分的水位传感器,其传统测试系统一般都是低效和低稳定性的,针对这种现象,我们研制了一种新型的水位传感器性能测试仪,可以自动测试传感器各项性能,并以友好的界面面向用户。
本文对其自动检测系统进行了较为详尽的阐述。
关键词:水位传感器 气电模拟 信息处理 快速测频
0 引言
随着企业竞争日益激烈,家电行业提出“零缺陷生产”。
主导家电产品之一的洗衣机,其发展从简单的机械开关控制到现在的微机智能控制,可靠性、自动化程度都得到了显著提高。
但作为全自动洗衣机中重要组成部分的水位传感器,其传统测试系统一般都是低效和低稳定性的。
针对这种现象,我们研制了一种新型的水位传感器自动测试装置。
1 水位传感器的工作原理
模糊洗衣机的水位传感器和以前的全自动洗衣机的水位开关有着很大区别,它是膜片电感式原理的,可在全量程范围内通过频率连续变化量表示水位高低,且测量是连续的,并可由洗衣机的单片机读出频率值并控制水的用量。
水位传感器的工作原理如图1所示,图2为转换电路图。
图1 水位传感器工作原理框图图2 转换电路
洗衣机内水位变化通过空气导管传给传感器的橡胶膜片,使膜片产生位移,膜片位移带动铁芯上下移动,引起电感的变化,即图2中的∃L,然后由电感和电容构成的选频网络,将电感变化转换为频率变化,再经放大器深度负反馈,输出频率是水位的单值函数,波形为三角波,经施密特整形电路后成为方波。
2 测试方案
测试方案的基本设计思路如图3所示。
图3 系统原理框图系统由三条线路构成:第一条是压力标准测量系统,将所测压力信号经标准水位传感器、
转换电路转换成电压信号,再经模数转换,送入主机;第二条是由计算机和电磁阀控制,模拟洗衣机水位快速变化的压力生成和控制系统,为了防止干扰,信号要进行光电隔离;第三条电路是测频电路。
图4 压-频曲线水位传感器测量系统将测得的压力信号与测得的频率信
号相比较,建立起一一对应的坐标关系,画出压力-频率曲线
(图4),并将其与标准的压力-频率曲线形成的公差带(已存于
主机内)相比较,检查是否在公差带内。
保持给定的最高压力一
段时间,在显示器上观察压力值变化,如若超出设定公差带就
说明传感器漏气。
本测试系统用气室压力模拟水位变化,可在微机控制下实
现快速自动升降压力,且压力的特性(速度和范围)可调,用标
准水位传感器测量气室压力,转换成标准水位,从而实现水位的快速气电模拟和测量。
图5 程序流程图
3 软件设计及计算机处理
图5所示为水位测量的程序流程框图。
为了实现快速测频,采用如下的方法:将传感器转换
电路输出的方波信号分频,应用高频脉冲填充法,在信号
中插入高频脉冲信号,根据计数脉冲的个数获得信号的
脉宽,再转换成频率值。
整个测频时间只需若干毫秒的时
间,原理图如图6所示。
本系统以486微机为主机,C 语言编程控制系统实现
测量过程的自动化,系统快速、准确,操作方便,并最终在
CR T 显示器上显示各档水位、
水位差值、水位-频率曲线(由压力、压差、压力-频率曲线转换),同时可在10kPa
压力下测试水位传感器的漏气状况。
采用C 语言编程,可充分发挥其处理功能强、运算速
度快的特点,直接实现对系统硬件及外围接口的控制。
本
图6 测频原理图程序为下拉式菜单设计,主菜单为:(1)水位测量;(2)漏气测量;(3)测量结果显示;(4)标定和修正;(5)零点频率(压力为零时所对应的频率);(6)退出。
4 误差分析
411 温度变化
不均匀的温度场会引起元件电参数的变化或产生
热电势,从而产生误差。
受温度影响最大的是系统采用的压阻硅气电转换元件,虽在生产时已进行了误差补偿处理,但实验表明其温度误差仍较大,且不同压阻硅的温漂误差不同,可用标准件法求取补偿值来修正误差。
412 电源波动
通过对实验数据的记录处理,得知传感器输出变化∃U和电源波动∃E之间关系近似为:∃U =01014∃E。
413 气压波动
由于气压波动影响(波动为±012%),被测压力值与实际的压力值会有一些偏差。
标准水位传感器测量误差是011%,引起测量结果的误差为±7185Pa,可用差动法减小气压波动的影响。
414 非线性误差
因气路环节的非线性特性,在测量范围较大时,必然有非线性误差。
在不同测量范围内对实验数据作回归分析,得出产生最大非线性误差的测量点,再进行误差补偿。
415 量化误差
在测频电路中,应用高频信号进行插频计数时,对采样信号取量化等级值,进行了“四舍五入”,量化后的信号与原模拟信号之间有差别,即量化误差,差值为±1196Pa。
416 其他误差
其他误差主要包括电磁干扰、线间电容干扰等带来的误差。
5 结论
水位传感器自动测试系统的研制成功,较好地解决了三个技术关键,即水位的自动模拟和测量,压力、频率变换和频率快速测量及水位-频率曲线拟合,以及传感器的漏气测量。
它的测量精度高,测量速度快,效率高,具有长时间的稳定性,解决了水位传感器大批量生产厂商和用户生产线上对传感器质量全检中生产效率的矛盾,自投入使用以来,运行可靠,效果良好。
参考文献
1 谭福年编著1常用传感器应用电路1电子科技大学出版社,1996
2 董渭清,王换招主编。
高档微机接口技术及应用.1995
3 李大友主编.数字电路逻辑设计.北京:清华大学出版社,1996
(下转第45页)
上式中,左端的e(T1)、e(T0)均为可测量,而右端为B t的非线性一元函数。
在这种情况下,我们可采用对分法[3]求解得到B t,对分法的上、下界可定为[11001,10]。
将测量值T0、计算值B t代入式(11),就可求出过阻尼检波器的自然角频率Ξ0。
最后,将T0、B t、Ξ0代入式(8),经过数学推导,我们可得到检波器灵敏度的计算公式
C m e=
mΞ0B2t-1e(T0)
I0 sh(Ξ0B2t-1T0)e B tΞ0T0
1
2
(15)
3 结 语
本文给出了基于直流激励的两点法测量过阻尼动圈式地震检波器的原理和操作,这种方法的正确性和有效性已经得到了实际验证[1]。
参考文献
1 王力.过阻尼地震检波器的测试方法研究:[学位论文].西安:西安石油学院,1998
2 付小宁,石金成,冯旭东等.直流激励法测定动圈式检波器灵敏度的溯源性研究.西安矿业学院学报,1998,18
(3)
3 许士良编.C常用算法程序集.北京:清华大学出版社,1996
R esearch on the M easu rem en t of O verdam ped Co il Geophone
Fu X iaon ing W ang L i
(X ian Co llege of O il,X ian 710065)
A b stract:T he p rinci p les and op erati on s fo r the m easu rem en ts of the m ain p aram eters of the over2 dam p ed co il geop hone,such as dam p,natu ral frequency and sen sitivity,by m ean s of A C excitati on are described in th is p ap er.
B ased on th is theo ry,a k ind of po rtab le sp ecific testing in strum en ts has been develop ed.
Key W o rds:co il geop hone,overdam p,testing
(上接第40页)
A u tom atic T esting System fo r W ater L evel
Sen so rs and the E rro r A nalysis
H u Shengqing,Zuo J ing and H u Y i
(H efei Indu strial U n iversity,H efei 230009)
A b stract:A novel testing system fo r the w ater level sen so r,w h ich is one of the key p arts of the au tom atic w ashers,has been develop ed.A ll the p rop erties of the sen so r can be tested au tom ati2 cally by th is system w h ich has friendly in terfaces to u sers.It is described in detail in th is article. Key W o rds:w ater level sen so r,info rm ati on p rocess,rap id m easu rem en t of frequency。