汽车定速巡航控制系统模拟设计
定速巡航小车设计与制作

定速巡航小车设计与制作
要设计和制作一个定速巡航小车,需要以下步骤:
1. 确定要使用的控制器和电机,这将影响小车的速度和控制方式。
可以选择Arduino控制器和直流电机。
2. 创建小车底盘,可以使用3D打印或机械加工方式制作。
底盘应该能够支撑控制器、电机和电池等组件,并提供安装轮子和传感器的空间。
3. 安装电机和电池,根据底盘的设计和电路图连接所有电气组件。
4. 为小车安装轮子,可以选择常规车轮或马达带轮。
5. 添加能够控制小车方向的舵机,也可以使用两个马达来控制左右轮子的运动。
6. 使用红外线传感器或超声波传感器来检测小车前方的障碍物,并编写程序控制小车的行驶。
7. 编写程序来实现小车的定速巡航功能,可以使用PID算法来控制小车的速度。
8. 测试小车的性能并进行调整,确保它可以在不同的地形和环境中正常运行。
通过以上步骤制作出一个定速巡航小车,可以用于自动化导航等应用场景。
基于simulink汽车速度控制系统的设计与仿真
基于simulink汽车速度控制系统的设计与仿真摘要:目前许多汽车把汽车速度控制系统作为配属设备或选配设备。
汽车装有汽车速度控制系统后,当驾驶员启动这一装置并进行一些简单的设置后,该装置可自动保持某一恒定速度行驶,而不踩油门。
由于电子系统能准确地控制车辆的速度,从而使高速行驶的车辆更加安全、平稳。
在文中,首先对汽车的运动原理进行分析,建立控制系统简化模型,根据研究对象的物理特性建立起汽车速度控制控制系统的微分方程,再将该微分方程进行线性化处理,运用PID控制理论的方法对汽车速度控制控制系统进行分析和控制。
然后对汽车速度控制系统进行设计分析,在已有的模型下,对设计的汽车速度控制系统进行Matlab语言仿真。
关键词:速度控制系统PID控制仿真指导老师签名:Design and Simulation of the vehicle speedcontrol systemStudent name Class:Supervisor:Abstract:At present, many cars make car speed control system as an attachment device or optional equipment. The car is fitted with the motor speed control system, when the driver start the device and make some simple settings, the device can automatically maintain a constant speed, and do not step on the accelerator. Because the electronic system can accurately control the speed of the vehicle, so that the high-speed vehicles more secure, stable.In this paper, the first principle of the movement of automobile is analyzed, establishing control system is simplified model, based on physical characteristics of the research object to establish the vehicle speed control differential equation of the control system, then the differential equation is linearized by using the method of control theory, analyze and control the motor speed control system. Then the design of the vehicle speed control system, the existing model, to design vehicle speed control system simulation language Matlab.Keyword:Speed control system PID control simulationSignature of Supervisor:目录1绪论 (1)1.1选题的依据及课题意义 (1)1.2汽车速度控制研究概况及发展趋势 (1)2速度控制系统的简述 (3)2.1汽车速度控制系统原理 (3)2.2速度控制系统的分类 (3)2.3速度控制系统的基本用途 (4)2.4电子式多功能速度控制系统功能 (4)3系统模型建立及性能分析 (6)3.1汽车受力分析 (6)3.2行驶汽车仿真模型 (7)3.3 动态性能和稳态性能指标 (8)4 PID控制器 (10)4.1 PID控制简述 (10)4.2 PID控制规律 (10)4.3 PID作用分析 (14)5 系统仿真及结果分析 (15)5.1 SIMULINK简介 (15)5.2实验方案选择 (15)5.2.1采用P控制 (15)5.2.2采用PI控制 (20)5.2.3采用PID控制 (22)5.3实验结果分析 (25)总结 (26)参考文献 (27)致谢 (28)1绪论1.1选题的依据及课题意义随着汽车工业和公路运输业的发展,汽车将走进千家万户,驾驶人员非职业化的特点将突出,车辆驾驶的自动化己成为汽车发展的主要趋势。
电动汽车定速巡航控制系统设计
电动汽车定速巡航控制系统设计电动汽车定速巡航控制系统设计近年来,随着环境保护意识的增强和能源危机的出现,电动汽车作为一种清洁、高效的交通工具逐渐受到广大消费者的认可和选择。
然而,与传统燃油汽车相比,电动汽车在长途行驶中面临着续航里程有限的问题,这给用户的使用带来了一定的限制和不便。
为了解决这一问题,电动汽车定速巡航控制系统应运而生。
电动汽车定速巡航控制系统旨在实现电动汽车在高速公路等长距离行驶时的自动巡航功能,提供更舒适和便利的驾驶体验。
该系统通过自动调整车辆的速度和动力输出,使得汽车在设定的速度下稳定行驶,从而减少车辆驾驶员的操作,提高驾驶的安全性和稳定性。
电动汽车定速巡航控制系统设计主要包括四个方面的内容:速度检测模块、控制算法、执行机构和人机交互界面。
首先,速度检测模块是电动汽车定速巡航控制系统的基础,它可以通过传感器实时检测车辆的行驶速度,并将检测的数据传输给控制算法模块。
通过准确检测速度,控制系统可以根据设定的目标速度来调整动力输出,实现定速巡航功能。
其次,控制算法是电动汽车定速巡航控制系统的核心。
它根据速度检测模块提供的数据,计算出车辆与目标速度之间的差值,然后通过分析和判断,控制动力系统输出的电能,使得车辆能够稳定地按照设定的速度行驶。
控制算法还可以结合车辆的负载情况、道路条件等因素进行优化,提高行驶的效率和舒适度。
第三,执行机构是将控制算法产生的指令转化为实际动力输出的关键环节。
它根据控制指令,调整电动汽车的电机输出功率,使得车辆能够按照设定的速度行驶。
在电动汽车定速巡航控制系统中,电机控制器是执行机构的核心组成部分,它通过调节电机的转速和扭矩,实现定速巡航的功能。
最后,人机交互界面是电动汽车定速巡航控制系统与驾驶员进行信息交流和操作的界面。
它可以通过仪表盘上的显示屏提供目前行驶速度、设定巡航速度等信息,驾驶员可以通过操作按钮或转动控制杆来设定和调整巡航速度。
人机交互界面的设计应该简洁明了、易于操作,以提高驾驶员使用的便捷性和用户体验。
智能车辆自适应巡航控制系统设计

智能车辆自适应巡航控制系统设计随着科技的发展和人们生活水平的提高,汽车成为了大多数人出行的必需品。
但是,随着如此多人使用汽车,交通拥堵、事故和污染等问题也随之而来。
为了解决这些问题,智能车辆的概念应运而生。
智能车辆是指配备了先进的传感器、计算机、通讯系统和控制系统的汽车,可以自主运行、感知周围环境、做出决策并执行任务。
而智能车辆自适应巡航控制系统就是其中一个重要的应用,它可以让汽车根据路况和实时交通情况调整巡航速度和距离,从而提高行车安全性和燃油经济性。
本文将探讨智能车辆自适应巡航控制系统的设计和原理。
一、智能车辆自适应巡航控制系统的作用智能车辆自适应巡航控制系统的主要作用是根据车辆所处的环境条件和实时交通情况,自动控制车辆的速度和距离,从而减少驾驶员的工作量并提高行车安全性和燃油经济性。
该系统利用车载传感器和地面交通信号控制系统收集路况和交通信息,并通过车辆自身的计算机处理这些数据,操纵车辆的油门、制动和转向,以保持车辆的速度和距离。
二、智能车辆自适应巡航控制系统的原理智能车辆自适应巡航控制系统的工作原理主要包括两部分:车辆位置和状况的感知(即数据采集),以及基于感知数据的控制策略的制定与执行。
1、数据采集车辆位置和状况的感知主要通过车辆传感器来实现。
传感器通常分为激光雷达、摄像头、惯性测量单元、超声波传感器、雷达等多种类型。
这些传感器会不断地扫描车辆周围的环境,收集路况和交通信息,例如周围车辆的速度、距离、方向和加速度等。
2、控制策略的制定与执行感知数据的处理和控制策略的制定和执行是智能车辆自适应巡航控制系统的核心。
该系统需要根据车辆周围的路况和交通情况,制定相应的控制策略来调整车速和距离。
比如,在高速公路上,车辆应该保持一定的巡航速度,而在城市道路上则应该减速,以应对交通密集的情况。
控制策略的主要目标是优化车速、车距和舒适性。
具体来说,该系统首先通过传感器获取前方车辆的速度和距离,然后搭配自身车速和制动状态,根据巡航距离和巡航速度来计算出应达到的车距和速度,再以控制策略来操纵车辆的油门、制动和转向等部件,使车辆保持在合适的速度和距离上,保持车辆的行车安全和舒适性。
汽车巡航控制系统的定速控制方法的仿真研究

计 算机 工程 与设计
C OM P UTE R E NGI NEERI NG AND DE S I GN
J u n . 2 0 1 3
Vo L 3 4 No . 6
第 3 4卷
第6 期
汽车巡航控制系统 的定速控制方法的仿真研究
付 锐 ,秦加合 ,王党青 ,郭明华。
s y s t e m’ S c o n t r o 1 .Us i n g c o - s i mu l a t i o n o f P r e S c a n a n d ma t l a b / s i mu l i n k c a n g e t t h e f o l l o wi n g r e s u l t s :u n d e r c o n d i t i o n t h a t c r u i s i n g s p e e d a n d i n i t i a l v e l o c i t y b o t h r e s p e c t i v e l y a r e 4 0 , 6 0 , 8 O , 1 0 0 k m/ h , t h i s c o n t r o l me t h o d r e a c h e s a s t e a d y s t a t e r e s p e c t i v e l y
( 1 . 长安 大学 汽车运输 安全保 障技 术 交通行 业重 点 实验 室 ,陕西 西安 7 1 0 0 6 4 ; 2 . 长安 大学 汽车 学院 ,陕 西 西安 7 1 0 0 6 4 )
摘 要 :为了保证汽车定速巡航 系统的控制精度 、响应速度和控制稳定性 ,提 出了一种基 于模糊 P I D的参数 自整定 的模 糊
车辆自适应巡航控制仿真系统word

车辆自适应巡航控制仿真系统
feedback-control. The vehicle adaptive cruise control simulation system is finished finally. It is applied to different driving scenarios including normal ACC , stop & go, and emergency braking. The simulation results show that the proposed ACC system is steady and safe in any driving scenario which proves the effectiveness of the ACC system. Keywords: adaptive cruise control; adaptive dynamic programming; PID controller; fuzzy inferences; particle swarm optimization.
II
Abstract
Abstract
Adaptive cruise control (ACC) system, one of driver-assistance systems, belongs to active security technology. By using a sensor to detect the target vehicle ahead and measure relative distance and relative speed, the host vehicle equipped with ACC adjusts their speed automatically and keeps a safe distance. It is an active safety technology, which maintains the vehicle in a constant speed set by the driver when no other vehicles ahead. ACC system aims at promoting the comfort, reducing the driver workload, as well as increasing the traffic volume and reducing the accidents. In the literature, Matlab/Simulink is used to build the vehicle longitudinal dynamics model, incorporating the engine, gearbox, driveline, brake and tire. The model is validated to possess the fundamental characteristics, similar to those of the vehicle. Meanwhile, it can be used to design and test the ACC system. In order to enforce the functions of ACC system and make it accurate and steady, there are two controllers in the ACC system-the upper controller and bottom controller. The upper controller will generate the desire acceleration control signal according to the setting of drivering habit, relative velocity and relative distance; the bottom controller will transfer the desired acceleration signal to the throttle and brake control signals, which will help to make the actual vehicle acceleration equal to the desired one. The upper controller is built with the help of a Supervised Adaptive Dynamic Programming (SADP) algorithm. SADP is able to learn online, not only the driving habit, but also the new road situation. The controller can tune its actions according to different situation and adapt itself to the complex and changeable driving scenarios. The bottom controller consists of the throttle control and the brake control. A self-tuning of proportional-integral-derivative (PID) controller based on fuzzy inference system is used in the throttle control. It solves the problem caused by the conventional PID controller that is linear relationship between the inputs and outputs. So this controller has the robustness and flexibility of fuzzy controller and the accuracy of PID controller as well. The parameters of the fuzzy inference part are optimized by means of particle swarm optimization algorithms using a fitness function associated with the system’s performance of indices. A hybrid feed-forward-control & feedback-control law is applied in the brake control, so that it has the speediness of feed-forward-control as well as the accuracy of
汽车自适应巡航的电机控制系统设计

AUTOMOBILE DESIGN | 汽车设计1 上层加速度控制器的设计自适应巡航控制器分为上下两层,上层控制器主要包含了PID控制,模糊控制两个部分。
因上层控制器输出汽车期望加速度,而下层控制器利用得到的期望加速度输出转矩,针对上层而言,计算期望加速度的算法决定了输出期望加速度的效果。
期望加速度应该在稳定性上提出较高要求,兼顾准确性与快速性。
2 定速巡航模式中的PID算法设计速度控制算法使汽车在行驶过程中的车速接近设定的行驶速度。
本文目标行驶速度采用定速模式情景,目标行驶速度为驾驶员人为设定速度。
速度控制算法的实现过程如下:将车速传感器输入汽车当前行驶的车速,与驾驶员人为标定的速度的差值,输入到控制器中,输出为电机的转矩并将这一参数作为输入量输入到开关磁阻电机中,使汽车达到设定的目标行驶速度。
因PID控制本身难度较小,稳定性强,所以选用此种算法来实现对速度的控制。
在本次设计中对PID控制器的比例系数Kp选用15.331,微分系数Kd选用0.112,积分系数Ki选用0.012,在Simulink中建模,对P,I,D三个参数加以调整仿真发现:系统在短时间内输出稳定在1.812m/s2的加速度a-ses,稳定性良好,满足实际需求。
当加速度数值较高时会严重影响驾驶员与乘客的乘车舒适性。
根据Moon Seungwuk 等人分析驾驶员的主观评价与行车数据,发康惠铭monash university Malaysia摘 要:自适应巡航系统(ACC)利用汽车周围的雷达来检测该汽车周围的情况,对车前某一区域的车速与距离进行判定,自动对车辆速度与跟车距离进行调节。
本设计从MATLAB仿真软件出发,对汽车自适应巡航系统的上层控制器和驱动电机进行设计,在Simulink中得到了稳定性强,抗干扰性能高的电机模型;在MATLAB的模糊推理系统中得到了输入D r(两车距离),V r(两车速度)与输出加速度a-ses的三维数学模型,从MATLAB的三维模型中可知,该上层控制器曲面光滑程度较好,表明输出接近连续;曲面的起伏较为平缓,表明性能优良,符合设计应用需求。
车辆定速巡航控制系统的设计
车辆定速巡航控制系统的设计
车辆定速巡航控制系统是一种能够实现车辆在高速公路等直路
上保持一定车速,无需驾驶员踩油门踏板的自动驾驶系统,可以提
高驾驶的舒适性和安全性。
下面是该系统的设计步骤:
1. 传感器选择:选择合适的传感器来检测车速、距离、方向盘
转动角度以及车道偏移等参数,比如雷达、激光传感器、视觉传感
器等。
2. 控制器设计:设计控制器来实现巡航控制功能,包括转速控制、方向盘控制、刹车控制等。
3. 车速测量模块设计:根据车辆的实际情况和传感器测量数据,设计车速测量模块来实现车速的精确测量。
4. 巡航功能实现:根据驾驶员的选择,控制器将根据车速和距
离来自动调整车速和加速,保持车辆在预定速度和距离范围内。
5. 碰撞监测和刹车系统:设计碰撞监测和刹车系统来检测前方
障碍物并自动降低车速或刹车以避免碰撞。
6. 用户界面设计:设计一个直观的用户界面,使驾驶员可以轻
松地选择巡航控制、设置巡航速度、调整车速等。
需要注意的是,实现车辆定速巡航控制系统需要多方面的技术
和设备,涉及到控制、传感、检测和监控等领域,因此需要全面考
虑系统的可靠性和安全性。
基于单片机的汽车巡航控制系统的建模与仿真

基于单片机的汽车巡航控制系统的建模与仿真作者:秦世林黄宇飞刘江东张见广来源:《企业科技与发展》2021年第09期【关键词】单片机;定速巡航;PID控制;燃油经济性【中图分类号】U463.6 【文献标识码】A 【文章编号】1674-0688(2021)09-0037-050 前言汽车巡航控制系统是控制速度稳定的一种辅助驾驶员驾驶车辆的系统。
当驾驶员驾驶车辆时,车速一旦到达设定的巡航系统开启的最低速度后,只需打开巡航开关,再按下巡航速度设定键,汽车将按设定的行驶速度稳定行驶。
若要更改巡航速度,只需按下巡航控制系统的速度调节按钮即可。
此时,驾驶员不需要操控油门踏板,仅通过汽车电子控制单元ECU调控汽车行驶速度,从而减轻驾驶员的精神负担。
随着社会经济的发展,中国进入了小康社会,汽车随着经济的发展逐渐走进人们的生活,或为人们的日常代步工具。
伴随智能交通系统的不断推广,这种能有效减轻驾驶员驾驶汽车的疲劳程度,从而减少因驾驶员失误操作而造成的交通事故的产品在普通家庭轿车上的应用将急剧增长。
对驾驶员来说,该产品提高了汽车的驾驶安全性和燃油经济性;对社会来说,该产品改善了交通状况。
近年来,汽车巡航控制系统得到政府、企业及高级研究机构的广泛关注。
此外,随着我国对于基础建设的重视,以道路交通发展促进我国经济快速发展,我国高速公路四通八达,汽车巡航控制系统具有良好的应用前景。
1 汽车巡航控制系统原理及功能1.1 汽车巡航控制系统原理在实体的汽车巡航控制系统中,汽车电子控制单元ECU根据各传感器传来的信号,经过处理后判断路况条件的变化,然后经过计算得到节气门开度的变化量,汽车电子控制单元ECU再控制节气门执行器调节节气门开度,使车辆以恒定速度稳定行驶,汽车巡航控制系统的基本控制原理如图1所示。
1.2 汽车巡航控制系统功能目前,市面上绝大部分的汽车巡航控制系统,主要由电子控制单元ECU、巡航控制开关、车速传感器、节气门执行器等组成[1]。
汽车巡航系统PID控制器设计
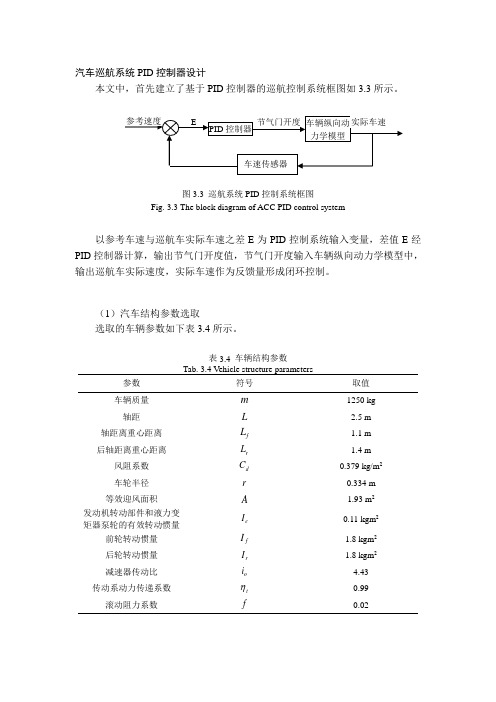
汽车巡航系统PID控制器设计本文中,首先建立了基于PID控制器的巡航控制系统框图如3.3所示。
图3.3 巡航系统PID控制系统框图Fig. 3.3 The block diagram of ACC PID control system以参考车速与巡航车实际车速之差E为PID控制系统输入变量,差值E经PID控制器计算,输出节气门开度值,节气门开度输入车辆纵向动力学模型中,输出巡航车实际速度,实际车速作为反馈量形成闭环控制。
(1)汽车结构参数选取选取的车辆参数如下表3.4所示。
表3.4 车辆结构参数Tab. 3.4 Vehicle structure parameters参数符号取值车辆质量m1250 kg轴距L 2.5 m 轴距离重心距离f L 1.1 mL 1.4 m 后轴距离重心距离rC0.379 kg/m2风阻系数d车轮半径r0.334 m等效迎风面积A 1.93 m2发动机转动部件和液力变I0.11 kgm2矩器泵轮的有效转动惯量e前轮转动惯量f I 1.8 kgm2I 1.8 kgm2后轮转动惯量r减速器传动比o i 4.43 传动系动力传递系数t 0.99滚动阻力系数f0.02(2)仿真工况设计论文设定仿真时间140s,设计了多种仿真工况,包括低速行驶状态下匀加速、匀速,高速行驶状态下匀加速、匀速及匀减速工况。
具体描述为初始时刻巡航车静止,前方目标车辆以12km/h起步并以0.8m/s2加速度加速至20km/h,然后以此速度匀速前进30s,在40s时再以1.5 m/s2加速至80km/h,保持80km/h速度匀速前进至120s,最终再以-0.5m/s2匀减速行驶。
汽车巡航系统PID控制仿真模块,它由纵向动力学模块及其控制器模块组成。
纵向动学模块包括发动机模块、液力变矩器模块、自动变速器模块以及车辆传动、行驶系及整车运动系统模块。
车辆纵向动力学模块仿真框图图中,FDJ——发动机子模块;YLBJQ——液力变矩器模快;CD——传递模块;CLDLX——车辆传动、行驶系及整车运动系统模块。
基于Matlab和模糊PID的汽车巡航控制系统设计

基于Matlab和模糊PID的汽车巡航控制系统设计一、本文概述随着汽车工业的快速发展和智能驾驶技术的不断进步,汽车巡航控制系统作为提高驾驶安全性和舒适性的重要手段,越来越受到人们的关注。
传统的巡航控制系统主要依赖于PID(比例-积分-微分)控制算法,虽然在一定程度上能够实现车速的稳定控制,但在面对复杂多变的道路环境和驾驶员的个性化需求时,其性能往往难以达到最优。
为了解决这个问题,本文将研究并设计一种基于Matlab和模糊PID的汽车巡航控制系统。
该系统将结合传统PID控制算法的稳定性和模糊控制算法的灵活性,通过Matlab进行建模与仿真,实现对汽车巡航速度的更精确、更智能的控制。
本文将介绍汽车巡航控制系统的基本原理和PID控制算法的基本原理;详细阐述模糊PID控制算法的设计思路和实现方法;然后,通过Matlab进行仿真实验,验证所设计的模糊PID控制算法在汽车巡航控制系统中的有效性和优越性;对本文的研究成果进行总结,并展望未来的研究方向和应用前景。
本文的研究不仅有助于提升汽车巡航控制系统的性能,同时也为智能驾驶技术的发展提供了新的思路和方法。
二、汽车巡航控制系统概述汽车巡航控制系统是一种先进的驾驶辅助系统,旨在通过自动调节发动机的油门或制动系统,使车辆能够在驾驶员设定的速度下稳定行驶,而无需持续踩踏油门踏板。
这种系统不仅可以提高驾驶的舒适性,减少驾驶员的疲劳感,而且在长途驾驶或高速公路上行驶时,能有效提高行车安全性。
巡航控制系统的核心在于其控制策略,它需要根据车辆当前的速度、加速度、道路条件以及驾驶员的设定速度等多个因素,进行实时计算和判断,以决定如何调整发动机的输出或制动力度。
传统的PID (比例-积分-微分)控制器因其简单性和有效性,在巡航控制系统中得到了广泛应用。
然而,由于实际驾驶环境的复杂性和不确定性,传统的PID控制器往往难以应对各种突发情况,如突然出现的障碍物、道路坡度变化等。
为了解决这个问题,近年来,基于模糊逻辑的控制器被引入到汽车巡航控制系统中。
基于PID控制的定速巡航系统设计与仿真

基于PID控制的定速巡航系统设计与仿真作者:刘宗辉周禹池陈鑫溶来源:《科学导报·学术》2019年第27期摘要:在定速巡航的车辆中,对巡航控制系统的结构及功能进行了梳理,基于直流电机建立数学模型,建立了巡航系统的控制器算法,确定了控制器的关键参数,经Simulink仿真测试,使用PID控制的定速巡航系统在稳定性和动态性能均有较好的特性。
关键词:汽车;巡航控制系统;PID控制一、系统组成汽车定速巡航控制系统是利用先进电子技术对汽车行驶速度进行自动调节,从而实现以事先设定的速度行驶的电子控制装置。
由于不用驾驶员操控油门,从而降低了驾驶员的疲劳强度,改善汽车的燃油经济性和降低汽车排气污染。
汽车在高速公路上行驶时,高速公路上的车辆较普通公路少,速度基本稳定在一个区间,因此定速巡航系统非常适用于高速公路这种车辆较少,速度稳定的实际应用,一个完整定速巡航系统应包括输入信号与诊断模块、巡航功能控制模块、巡航速度控制模块等构成。
在多种信号的作用下,共同控制汽车定速时速度大小。
二、建立系统模型本文以直流电动机为研究对象,对直流电动机建立特性方程,通过直流电机的特性方程,来分析直流电机的性能,以及改进的策略。
2.1 直流电机模型建立额定励磁下,直流电机电压平衡关系和转矩平衡关系进行拉氏变换得到:由上方程组可以得到直流电机系统传递方程。
三、系统分析3.1 系统传递方程若负载为0,则可求得输入输出传递函数同时可得系统的开环传递函数3.2.3 频域分析图3-2 电机的Bode图和Nyquist图系统的幅值裕量为∞,相位裕量为85.19,幅值裕量和相位裕量处对应的频率值分别为无穷大与19.23,由于相位裕量为85.19 > 0,系统稳定。
从Nyquist图中也可以看出,特性曲线所围绕(-1,j0)点的圈数为0圈,开环传递函数在右侧无极点,因此Z=P-2N=0,开环系统稳定。
四、系统改进在时域的分析中,系统的超调量过大,响应时間极快,由此带来的问题是超调量大可能会损坏设备,因此可用测速反馈和PID调节对系统进行改进。
车辆自适应巡航控制系统(ACC)设计

车辆自适应巡航控制系统(ACC)设计与分析65090617付裕一、引言ACC系统全称就是自适应巡航控制系统,它是一种智能化的行车自动控制系统,它是在早已存在的定速巡航控制技术的基础上发展而来的。
在行驶过程中,安装在车辆前部的车距传感器会持续扫描车辆前方道路,同时轮速传感器采集车速信号。
当与前面的车之间的距离过小时(这可以在车内设定距离),ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,同时车内音响会发出警报声音提醒走神的驾驶员注意,它能有效的防止追尾这类事故的发生。
本文将通过连续系统设计与分析的知识对ACC系统进行分析。
二、研究对象工作过程和要求描述1.控制原理:电控单元有两个输入信号,当测出的实际车速高于或低于驾驶员调定的车速时,电控单元将这两种信号进行比较,得出两信号之差,即误差信号,再经放大、处理后成为油门控制信号,送至油门执行器,驱动油门执行器动作,调节发动机油门开度,以修正两输入车速信号的误差,从而使实际车速很快恢复到驾驶员设定的车速,并保持恒定。
2.系统框图如下:三、被控对象的数学模型建立m ——汽车质量g ——重力加速度f ——滚动阻力系数C ——空气阻力系数A ——等效迎风面积r ——轮胎半径gi ——变速器速比di ——主减速器速比η——传动效率当获取了自适应巡航状态下的速度控制目标ad后,整车期望转矩四、控制系统的控制器模型设计经查询资料可知发动机工作模式下的传递函数如下综合查询的数据与发动机、变速箱、节气门控制器等传递函数可得,ACC系统的传递函数如下五、 MATLAB仿真结果单位阶跃响应:伯德图根轨迹图六、控制系统性能分析1、 稳态性能分析1) 稳态误差分析位置误差系数:2.143)(lim 0==→s G K s p 故稳态误差为:007.01==pss K e ,故此系统具有良好稳态性能。
2) 根轨迹分析 由开环传递函数可知被控对象极点为:150,10,10321-=-=-=P P P ,零点为无穷远处。
汽车定速巡航控制系统模拟设计讲解

《汽车电子》课程设计说明书设计题目:汽车定速巡航控制系统模拟设计学院名称:专业:姓名:学号:指导老师:2013年12月目录第1章课题分析 (2)第2章模拟方案设计 (4)第3章系统硬件设计 (4)3.1 系统总体电路图 (5)3.2主要元器件简介 (5)3.2.1 AT89C51芯片简介 (5)3.2.2 ADC0808芯片简介 (7)第4章系统软件设计 (9)4.1 主程序流图 (9)4.2汇编程序源代码 (10)第5章系统仿真结果 (12)参考文献 (15)课程设计小结 (16)第1章课题分析定速巡航系统(CRUISE CONTROL SYSTEM) 缩写为CCS,又称为定速巡航行驶装置,速度控制系统,自动驾驶系统等。
其作用是:按司机要求的速度合开关之后,不用踩油门踏板就自动地保持车速,使车辆以固定的速度行驶。
采用了这种装置,当在高速公路上长时间行车后,司机就不用再去控制油门踏板,减轻了疲劳,同时减少了不必要的车速变化,可以节省燃料。
其中现在比较普遍的有两种控制方式,一种是最新电子式,一种是机械控制式。
较我们的课题而言,最新电子式的工作原理及其控制系统是我们需要研究的。
工作过程:最新电子油门定速巡航的工作过程更加智能化和精确化,是通过定速巡航系统控制电子油门传感器输出的信号,控制节气门开启大小的调整,来实现对车辆速度的控制。
定速巡航功能开启后,定速巡航模块会通过电子油门传感器输出的信号,精确计算为保持当前定速巡航速度,需要控制节气门开启的角度大小,从而使得气、油精确配合,来达到定速巡航所设定的行驶速度,完全摒弃了传统的机械部分控制,已达到控制更精准、安全的效果。
最新电子式定速巡航的各个功能的工作原理如下:(1)定速巡航功能:主要是通过巡航控制组件读取车速传感器发来的脉冲信号与设定的速度进行比较,通过精准的电子计算发出指令,保证车辆在设定速度下的最精准供油量。
(2)电子节油功能:主要是通过智能优化控制节气门的开启角度与开启时间,有效屏蔽电子油门传感器由于颠簸路段及不良驾驶习惯形成的杂乱信号,经过精确计算喷油量,使燃油得到最充分燃烧,来实现节油。
毕设:汽车定速巡航系统设计(原创)
论文题目:汽车定速巡航系统设计指导教师:刘强⏹专业:测控技术与仪器⏹班级:测控0704⏹学生:王发科⏹学号:0703020401学位论文答辩背景:随着经济的高速发展,汽车工业和公路运输也得到了快速的发展,这使得车辆驾驶的自动化己成为汽车发展的主要趋势之一。
与此同时,人们需要更加舒适、简便和安全的交通工具,以适应快速的生活节奏,因此对汽车智能化的要求更加迫切。
在长途驾驶中,我们不仅要控制车辆的方向,车辆的油门踏板也需要在我们的实时控制之下,这种“变化”的控制,不仅影响发动机的动力性和驾驶的舒适性,更是增加了驾驶的强度,给我们的生产生活带来了很大的安全隐患。
因此我们就需要一种驾驶辅助系统,来改善这些不利因素。
学位论文答辩意义汽车定速巡航控制系统(CCS)就是可使汽车工作在发动机稳定且有利转速范围内,减轻了驾驶员的操纵强度,提高行驶舒适性和安全性,在很大程度上降低或避免了交通事故的发生。
它的安装能使汽车的动力性、操作稳定性、安全性、燃油经济性及尾气的排放量都得到了大幅改善。
能给我们的生产、生活带来极大的便利。
同时,随着我国高速公路网的迅速扩大和延伸,汽车巡航控制系统不仅能提高公路的利用率,而且它的其他优越性能也将更好的体现出来。
因此,这种汽车新技术在我国具备广泛的发展和应用前景,其研究的意义也是非常重大的。
研究现状汽车定速巡航控制系统是当汽车在高速公路上行驶时,驾驶员即使不踏油门踏板,汽车能根据驾驶员设定的目标车速自动调节油门开度,使车辆达到按目标车速自动行驶目的的装置。
国外研究巡航控制系统起步很早,其发展过程主要经历了三个阶段,分别是以模拟电路为基础的汽车巡航控制系统、以数字技术为基础的汽车巡航控制系统和以智能化为核心的汽车巡航控制系统。
由于国内汽车起步较晚,并且就目前我国公路状况和实际应用来说,对汽车巡航控制系统的研究应用主要是以单车定速控制为主。
目前,模拟汽车恒速控制器在我国已经投人生产和使用,主要是机电式巡航控制系统。
基于PID控制的汽车定速巡航系统设计与试验
基于PID控制的汽车定速巡航系统设计与试验汽车定速巡航系统是一种能够保持车辆在设定速度范围内自动保持稳定车速的系统。
PID(比例-积分-微分)控制是一种常用的控制算法,它可以根据当前系统的状态进行调整,并使系统保持稳定的状态。
本文将介绍基于PID控制的汽车定速巡航系统的设计和试验。
首先,我们需要实现测量和控制系统的硬件设计。
这包括车速传感器,用于测量当前车辆的速度,并将其作为反馈信号输入到控制系统中。
另外,还需要设计一个执行器,例如节气门执行器,控制汽车的加速和减速。
这些硬件组件需要与控制器进行连接,以便能够实现相应的控制操作。
其次,我们需要设计PID控制器。
PID控制器由比例(P)、积分(I)和微分(D)三个部分组成。
比例部分用于通过比例调整来纠正系统的误差,积分部分用于积累误差并适应系统的变化,微分部分用于预测系统未来的变化趋势。
PID控制器的设计需要根据实际系统的特性进行参数调整,以达到系统稳定控制的目标。
接下来,我们进行系统的试验。
首先,我们需要通过实验测量得到汽车的速度-时间曲线。
然后,将测得的速度作为反馈信号输入到PID控制器中,控制器将根据设定的目标车速和当前的反馈信号调整执行器的操作,以实现保持车速稳定的目标。
在试验中,我们可以通过车速表或者车载仪表板上的车速显示来观察系统的效果。
在试验过程中,我们还可以对PID控制器进行参数调整和优化。
通过调整PID控制器的比例、积分和微分参数,可以改变系统的响应速度和稳定性。
例如,增加比例参数可以提高系统的快速响应能力;增加积分参数可以降低系统对干扰的敏感性;增加微分参数可以改善系统的稳定性。
通过不断调整参数,我们可以找到最优的PID参数,以实现最佳的控制效果。
综上所述,基于PID控制的汽车定速巡航系统设计和试验包括了硬件设计、PID控制器设计和参数调整三个主要步骤。
通过合理设计和优化PID控制器,我们可以实现车辆稳定巡航的目标,提高驾驶的舒适性和安全性。
汽车巡航控制系统的软件设计与仿真

汽车巡航控制系统的软件设计与仿真
肖茵茵;肖统民
【期刊名称】《汕头大学学报(自然科学版)》
【年(卷),期】2015(030)001
【摘要】基于实际的小车模型,使用PIC16F877A单片机、AH3144霍尔传感器等部件,以C语言为软件编程语言,设计实现了一个汽车电控巡航控制模拟系统.首先对系统总体结构进行介绍,然后详细阐述了系统各功能模块的软件设计方案,并对其软件核心控制策略—增量式PID算法进行改进,最后给出了部分程序示例及仿真调试结果.实验结果表明,改进的增量PID算法使系统响应更快,增加了巡航控制的稳定性,整个系统能较好地满足自动巡航的各项功能需求,具有一定的市场应用价值.
【总页数】10页(P71-80)
【作者】肖茵茵;肖统民
【作者单位】广东技术师范学院计算机科学学院,广东广州510665;汕头大学工学院,广东汕头515063
【正文语种】中文
【中图分类】TP273
【相关文献】
1.轿车定速巡航控制系统软件设计∗ [J], 黄宝山;包凡彪
2.无人车的巡航控制系统的设计与仿真 [J], 刘智平;薛晋强
3.汽车自适应巡航控制系统硬件在环仿真平台的设计与仿真试验 [J], 冯道宁;刘昭
度;马国成;王宝峰
4.汽车巡航控制系统及自适应巡航控制系统 [J], 周洁;子荫
5.基于单片机的汽车巡航控制系统的建模与仿真 [J], 秦世林;黄宇飞;刘江东;张见广
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《汽车电子》课程设计说明书设计题目: 汽车定速巡航控制系统模拟设计学院名称:专业:姓名:学号:指导老师:2013年12月目录第1章课题分析 (2)第2章模拟方案设计 (4)第3章系统硬件设计 (4)3、1 系统总体电路图 (5)3、2主要元器件简介 (5)3.2.1 AT89C51芯片简介 (5)3.2.2 ADC0808芯片简介 (7)第4章系统软件设计 (9)4、1 主程序流图 (9)4、2汇编程序源代码 (10)第5章系统仿真结果 (12)参考文献 (15)课程设计小结 (16)第1章课题分析定速巡航系统(CRUISE CONTROL SYSTEM) 缩写为CCS,又称为定速巡航行驶装置,速度控制系统,自动驾驶系统等。
其作用就是: 按司机要求的速度合开关之后,不用踩油门踏板就自动地保持车速,使车辆以固定的速度行驶。
采用了这种装置,当在高速公路上长时间行车后,司机就不用再去控制油门踏板,减轻了疲劳,同时减少了不必要的车速变化,可以节省燃料。
其中现在比较普遍的有两种控制方式,一种就是最新电子式,一种就是机械控制式。
较我们的课题而言,最新电子式的工作原理及其控制系统就是我们需要研究的。
工作过程:最新电子油门定速巡航的工作过程更加智能化与精确化,就是通过定速巡航系统控制电子油门传感器输出的信号,控制节气门开启大小的调整,来实现对车辆速度的控制。
定速巡航功能开启后,定速巡航模块会通过电子油门传感器输出的信号,精确计算为保持当前定速巡航速度,需要控制节气门开启的角度大小,从而使得气、油精确配合,来达到定速巡航所设定的行驶速度,完全摒弃了传统的机械部分控制,已达到控制更精准、安全的效果。
最新电子式定速巡航的各个功能的工作原理如下:(1)定速巡航功能:主要就是通过巡航控制组件读取车速传感器发来的脉冲信号与设定的速度进行比较,通过精准的电子计算发出指令,保证车辆在设定速度下的最精准供油量。
(2)电子节油功能:主要就是通过智能优化控制节气门的开启角度与开启时间,有效屏蔽电子油门传感器由于颠簸路段及不良驾驶习惯形成的杂乱信号,经过精确计算喷油量,使燃油得到最充分燃烧,来实现节油。
(3)油门加速功能:主要就是通过提高节气门响应灵敏度实现的,当系统发现司机有加速意愿时,会驱动节气门尽可能快的打开,这样就使油门响应的敏感度得到了提高。
在油门踏板被踩下时,控制器会根据踩下幅度、时间计算油门信号的变化率,变化越快,说明加速要求越强烈,最终实现油门响应速度更快,整车的动力感会明显增加,能够让司机感觉到整车动力大大提升。
(4)限速设定功能:通过控制器,根据限定的速度值,设定输出油门信号最大值,当油门输出信号超不过设定的最大值,来实现限制速度的目的。
(5)刹车故障报警功能:通过采取刹车电路的信号,当刹车电路或刹车保险故障时,会通过告警的方式对司机进行提示。
在现在的中高档的轿车中都应用到定速巡航系统。
我们本次的课程设计所做的汽车定速巡航控制系统模拟设计将对其中的原理与控制有更加清楚的认识,对我们将来从事汽车电子方面的工作有着更大的帮助。
第2章模拟方案设计定速巡航主要应用在车速比较高的而且就是长时间保持高速行驶状态下,因此在实际的汽车运行中,由于高速的危险性就是巨大的,所以定速巡航控制系统要非常准确且精密,稍有疏忽,将会带来致命性的后果,因此使得定速巡航控制系统模拟设计比较复杂,在仿真实验中可以用proteus软件中的电位器模拟节气门开度,节气门的开度变化对应着电位器电压值的变化。
在本课程设计中可以将控制系统简化为电位器的电压随着节气门开度的变化,并通过点亮与熄灭不同的二极管以及启动与关闭蜂鸣器来显示车速的定速值。
节气门开度的大小决定了车速的变化,在实际车辆行驶中,定速巡航的判断依据就是车速与启用定速巡航控制开关,当车正常行驶时,P1、4开关闭合,其中的LED灯亮;当按下其她开关时,由于其她的开关的优先级都高于P1、4,所以其她开关工作时,LED灯灭,此时显示屏显示按下开关对应的数值,汽车按开关设定的数值进行行驶。
第3章系统硬件设计2、1 系统总体电路图定速巡航控制系统模拟设计系统总体电路图中主要由AT89C51单片机、发光二极管,LED显示器等组成,其具体连接电路如图1所示:图1 定速巡航控制系统总体电路图2、2主要元器件简介1、 AT89C51单片机 1个2、 PCB 板 1 块3、发光二极管 1 个4、 30P电容 3只5、 12MHZ晶振 1 个6、导线若干7、二极管 5个8、 10k电阻 8个9、 1k 电阻 5个9、电容 1个10、10U/25V电容 1只11、 220欧姆电阻 1只12、 4位LED显示器 1个2.2.1 AT89C51芯片简介AT89C51就是一种带4K字节闪烁可编程可擦除只读存储器(FPEROM—Falsh Programmable and Erasable Read Only Memory)的低电压,高性能CMOS8位微处理器,俗称单片机。
该器件采用A TMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集与输出管脚相兼容。
由于将多功能8位CPU与闪烁存储器组合在单个芯片中,A TMEL的AT89C51就是一种高效微控制器,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
VCC:供电电压。
GND:接地。
P0口:P0口为一个8位漏级开路双向I/O口,每脚可吸收8TTL门电流。
当P1口的管脚第一次写1时,被定义为高阻输入。
P0能够用于外部程序数据存储器,它可以被定义为数据/地址的第八位。
在FIASH编程时,P0 口作为原码输入口,当FIASH进行校验时,P0输出原码,此时P0外部必须被拉高。
P1口:P1口就是一个内部提供上拉电阻的8位双向I/O口,P1口缓冲器能接收输出4TTL 门电流。
P1口管脚写入1后,被内部上拉为高,可用作输入,P1口被外部下拉为低电平时,将输出电流,这就是由于内部上拉的缘故。
在FLASH编程与校验时,P1口作为第八位地址接收。
P2口:P2口为一个内部上拉电阻的8位双向I/O口,P2口缓冲器可接收,输出4个TTL门电流,当P2口被写“1”时,其管脚被内部上拉电阻拉高,且作为输入。
并因此作为输入时,P2口的管脚被外部拉低,将输出电流。
这就是由于内部上拉的缘故。
P2口当用于外部程序存储器或16位地址外部数据存储器进行存取时,P2口输出地址的高八位。
在给出地址“1”时,它利用内部上拉优势,当对外部八位地址数据存储器进行读写时,P2口输出其特殊功能寄存器的内容。
P2口在FLASH编程与校验时接收高八位地址信号与控制信号。
P3口:P3口管脚就是8个带内部上拉电阻的双向I/O口,可接收输出4个TTL门电流。
当P3口写入“1”后,它们被内部上拉为高电平,并用作输入。
作为输入,由于外部下拉为低电平,P3口将输出电流(ILL)这就是由于上拉的缘故。
RST:复位输入信号输入端,高电平有效。
当振荡器工作时,在此引脚上出现两个机器周期以上的高电平,就可以使单片机复位。
ALE/PROG:当访问外部存储器时,地址锁存允许的输出电平用于锁存地址的地位字节。
在FLASH编程期间,此引脚用于输入编程脉冲。
在平时,ALE端以不变的频率周期输出正脉冲信号,此频率为振荡器频率的1/6。
因此它可用作对外部输出的脉冲或用于定时目的。
然而要注意的就是:每当用作外部数据存储器时,将跳过一个ALE脉冲。
如想禁止ALE的输出可在SFR8EH地址上置0。
此时, ALE只有在执行MOVX,MOVC指令就是ALE才起作用。
另外,该引脚被略微拉高。
如果微处理器在外部执行状态ALE禁止,置位无效。
PSEN:外部程序存储器的选通信号。
在由外部程序存储器取指期间,每个机器周期两次/PSEN有效。
但在访问外部数据存储器时,这两次有效的/PSEN信号将不出现。
EA/VPP:当/EA保持低电平时,则在此期间外部程序存储器(0000H-FFFFH),不管就是否有内部程序存储器。
注意加密方式1时,/EA将内部锁定为RESET;当/EA端保持高电平时,此间内部程序存储器。
在FLASH编程期间,此引脚也用于施加12V编程电源(VPP)。
XTAL1:反向振荡放大器的输入及内部时钟工作电路的输入。
XTAL2:来自反向振荡器的输出。
振荡器特性:XTAL1与XTAL2分别为反向放大器的输入与输出。
该反向放大器可以配置为片内振荡器。
石晶振荡与陶瓷振荡均可采用。
如采用外部时钟源驱动器件,XTAL2应不接。
有余输入至内部时钟信号要通过一个二分频触发器,因此对外部时钟信号的脉宽无任何要求,但必须保证脉冲的高低电平要求的宽度。
芯片擦除:整个PEROM阵列与三个锁定位的电擦除可通过正确的控制信号组合,并保持ALE管脚处于低电平10ms 来完成。
在芯片擦操作中,代码阵列全被写“1”且在任何非空存储字节被重复编程以前,该操作必须被执行。
此外,AT89C51设有稳态逻辑,可以在低到零频率的条件下静态逻辑,支持两种软件可选的掉电模式。
在闲置模式下,CPU停止工作。
但RAM,定时器,计数器,串口与中断系统仍在工作。
在掉电模式下,保存RAM的内容并且冻结振荡器,禁止所用其她芯片功能,直到下一个硬件复位为止。
第4章系统软件设计4、1 主程序流程图定速巡航控制系统流程图如图2所示:LED灯灭图2 定速巡航控制系统流程图4、2汇编程序源代码ORG 00HSJMP LORG 0003HLJMP KORG 30HL:MOV P1, #00HMOV P0 , #00HSETB EASETB EX0SETB P3、0SJMP LK:JB P1、0, X1JB P1、1, X2JB P1、2, X8JB P1、3, X9SJMP X5X5:LJMP X10CX: RETIX1:SETB P3、0MOV P0, #3FHSETB P2、1SETB P2、2CLR P2、3LCALL DELAYMOV P0, #6FHSETB P2、3CLR P2、2LCALL DELAYSJMP CXX2:SETB P3、0MOV P0,#3FHSETB P2、1SETB P2、2CLR P2、3LCALL DELAYMOV P0, #3FHSETB P2、3SETB P2、1CLR P2、2 LCALL DELAY MOV P0, #06H SETB P2、3 SETB P2、2 CLR P2、1 LCALL DELAY SJMP CXX8: SETB P3、0 MOV P0, #3FH SETB P2、1 SETB P2、2 CLR P2、3 LCALL DELAY MOV P0, #06H SETB P2、3 SETB P2、1 CLR P2、2 LCALL DELAY MOV P0, #06H SETB P2、3 SETB P2、2 CLR P2、1 LCALL DELAY SJMP CXX9: SETB P3、0 MOV P0, #3FH SETB P2、1 SETB P2、2 CLR P2、3 LCALL DELAY MOV P0, #5BH SETB P2、3 SETB P2、1 CLR P2、2 LCALL DELAY MOV P0, #06H SETB P2、3 SETB P2、2 CLR P2、1 LCALL DELAY LJMP CXX10: CLR P3、0 LCALL DELAYLJMP CXDELAY:MOV R6,#250DL1:MOV R7, #100DL2:DJNZ R7, DL2DL3:DJNZ R6, DL1RETEND第5章系统仿真结果定速巡航控制系统模拟设计结果如下图3-图7所示:图3定速巡航速度正常行驶(LED亮)图4定速巡航速度在设置90km/h的仿真结果(P1、0闭合)图5定速巡航速度在1000km/h的仿真结果(P1、1闭合)图6定速巡航速度为110km/h的仿真结果(P1、闭合)图7定速巡航速度在120km/h的仿真结果(P1、3闭合)参考文献1.单片微型机原理、应用与实验[M] , 张友德赵志亮涂时亮编复旦大学出版社2.单片机实用教程 [M] , 李勋刘源编著李新民主审北京航空航天大学出版社3.单片微型计算机原理与应用 [M], 胡乾斌李光斌李玲甘锡英华中理工大学出版社沈庆阳等、4.单片微型实践及应用[M],清华大学出版社 20015.蔡振江、单片机原理及应用、电子工业出版社,2008、56.可编程控制器应用技术与设计实例[M],人民邮电出版社7.周润景,袁伟亭,景晓松、PROTEUS 在 MCS-51&ARM7系统中的应用百例、电子工业出版社,2006、108.课程设计小结课程设计就是一项重要的实践环节,就是我们在校期间必须接受的一项工程训练。