4-点光源跟踪系统(报告)(光敏三极管检测与放大电路)
点光源跟踪报告
3.2编程思想
本设计思想:采用三个光敏三极管采集光强,左右两个用于判断光源的位置是在左还是右,中间的用于精确定位点光源.
方案二:采用大功率三极管TIP31C做大功率LED灯的驱动。大功率三极管TIP31C能通过最大电流为3A,完全能够合乎题目的要求。设计时,利用三极管基极电流与发射极电流的倍数关系,设计出一个电流连续可调的恒流源。实验后发现效果比较明显,易于控制。
由于三极管主要就是通过电流的关系而工作的,其电流特性比较稳定,且易于控制,所以本系统选择了方案二。
图2-1光源检测模块1
由运放的特性知:V2=V3,Ir2=0,由反馈特性知:V2=V1=V4* ;
取R3=1K,R4=9.1K;可得Av=10;再加一级电压跟随器可增加电路带负载能力。
2.2高亮度LED灯驱动电路
本方案要求LED灯的电流能够连续可调,所以采用大功率三极管TIP31C来驱动它,利用三极管集电极电流与基极电流的倍数关系来驱动1Wled灯并实现其连续可调的功能。测试时发现其电流受基极的电位计控制,所以能够实现其连续可调,且效果较好。其详细电路图如下图2-3
七.参考文献
[1]康华光.模拟电子技术基础(第五版).高等教育出版社.2006
[2]高吉祥.全国大学生电子设计竞赛培训系列教程.电子工业出版社.2007
[3]郭天祥.51单片机C语言教程.电子工业出版社.2008
6.7%
20度
是
0.5度
2.5%
30度
是
点光源跟踪系统(四路)

电子设计报告点光源跟踪系统(B题)组员:樊华姚文涵沈洁学校:南京师范大学中北学院专业:电子信息工程指导老师:朱晓舒目录摘要 (3)关键词 (3)一、引言 (4)二、系统方案选择与论证 (5)2.1各种方案设想及论证、优缺点 (5)2.1.1 光敏元件选择方案 (5)2.1.2 光源检测方案 (6)2.1.3 传感器布局方案 (7)2.1.4光电跟踪系统前置放大电路方案 (7)2.1.5 外界环境干扰及其消除方案 (8)三、理论分析与计算 (8)3.1 LED亮度可调电路的理论分析与计算 (8)3.2光电跟踪系统前置放大电路理论分析与计算 (9)四、电路与程序设计 (11)4.1系统的硬件设计 (11)4.1.1微处理和微控制系统单片机 (11)4.1.2电机类型选择 (11)4.1.3系统供电电源设计 (11)4.1.4点光源LED亮度可调电路 (12)4.1.5 光电跟踪系统前置放大电路(跨阻放大器) (12)4.1.6步进电机驱动电路 (12)4.1.7 机械部分的设计 (12)4.1.8系统总体硬件电路框图 (13)4.2系统的软件设计 (13)4.2.1 软件设计总体思想 (13)4.2.2 系统软件结构设计框图 (13)五、测试方案、结果及分析 (15)六、部分设计亮点及调试难点解决方案 (16)6.1 硬件电路设计创意 (16)6.2 用光的特性(直线性)设计检测方法,进行位置精确定位 (16)6.3 软件部分控制精髓 (17)七、总结 (17)八、结束语 (17)九、附录 (18)附录一:系统+12V、+5V供电电源电路图 (18)附录二:LED亮度可调电路 (18)附录三:光源跟踪系统前置放大电路(I-V转换电路) (19)附录四:TLV1544 AD转换电路 (19)附录五:步进电机驱动电路图 (19)附录六:整机系统相关电路图 (20)附录七:整机系统实物图 (20)十、参考文献 (21)摘要本设计以TI公司的超低功耗MCU MSP430 处理器为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统,该光源跟踪系统能够跟踪点光源位置并由激光笔尽快指向点光源的光电方式定位,以考核光源跟踪系统跟踪点光源的灵敏度以及激光瞄准点光源的精确性来评判设计完成指标。
点光源跟踪系统光敏三极管步进电机激光笔点光源跟踪

摘要:本设计以TI的LM3S1138处理器为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统,当LED光源在圆弧或直线上运动时,检测模块检测信号后经过放大滤波送入LM3S1138进行处理,用电机驱动模块控制检测模块在水平和竖直方向上的旋转使激光笔指示光源位置,即实现点光源跟踪。
系统主要由四个模块构成:LED驱动模块、检测及其转换模块、LM3S1138处理模块和电机控制模块。
其中用TPS61087驱动LED,光敏三极管检测光照强度,由两个步进电机分别控制激光笔水平和竖直方向上的旋转。
关键字:LM3S1138 TPS61087 光敏三极管步进电机激光笔点光源跟踪一系统方案根据题目的要求,设计任务是通过使用光敏器件检测光照强度来判断光源的位置并用激光笔指示光源的位置。
为了完成上述功能,将整个系统设计为两个模块,点光源模块和指示光源模块。
整个系统的总体框图如图1-1所示:图1-1 系统总体框图1.1 LED驱动模块方案选择与论证方案一:采用LM317做LED驱动模块。
LM317是三端可调正稳压器集成电路,它的输出电压X围是1.2V至37V,负载电流最大为1.5A。
由LM317构成的驱动电路简单,但功耗较大,而且要注意散热问题。
方案二:采用TPS61087做LED驱动模块。
TPS61087是具有强制PWM模式的650kHz/1.2MHz升压DC-DC转换器,输入电压X围为2.5~6V,输出电压可高达18.5V。
采用TPS61087的驱动电路的输出电流可达500mA以上,足够用来驱动150~350mAX围的白光LED。
因此本设计采用方案二。
1.2 光敏传感器的选择与论证方案一:采用光敏电阻检测光照强度。
它在强光照射下光电转换线性较差,频率响应很低。
方案二:采用光敏二极管检测光照强度。
当反向电流增大时,但容易受温度变化的影响。
方案三:采用光敏三极管检测光照强度。
光敏三极管还有电流放大作用,它的集电极电流不只是受基极电路和电流控制,同时也受光辐射的控制。
电光源跟踪系统报告
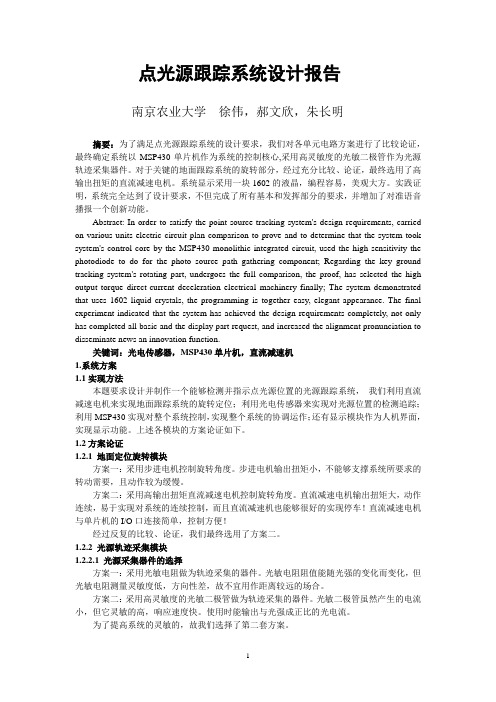
点光源跟踪系统设计报告南京农业大学徐伟,郝文欣,朱长明摘要:为了满足点光源跟踪系统的设计要求,我们对各单元电路方案进行了比较论证,最终确定系统以MSP430单片机作为系统的控制核心,采用高灵敏度的光敏二极管作为光源轨迹采集器件。
对于关键的地面跟踪系统的旋转部分,经过充分比较、论证,最终选用了高输出扭矩的直流减速电机。
系统显示采用一块1602的液晶,编程容易,美观大方。
实践证明,系统完全达到了设计要求,不但完成了所有基本和发挥部分的要求,并增加了对准语音播报一个创新功能。
Abstract: In order to satisfy the point source tracking system's design requirements, carried on various units electric circuit plan comparison to prove and to determine that the system took system's control core by the MSP430 monolithic integrated c ircuit, used the high sensitivity the photodiode to do for the photo source path gathering component; Regarding the key ground tracking system's rotating part, undergoes the full comparison, the proof, has selected the high output torque direct-current deceleration electrical machinery finally; The system demonstrated that uses 1602 liquid crystals, the programming is together easy, elegant appearance. The final experiment indicated that the system has achieved the design requirements completely, not only has completed all basic and the display part request, and increased the alignment pronunciation to disseminate news an innovation function.关键词:光电传感器,MSP430单片机,直流减速机1.系统方案1.1实现方法本题要求设计并制作一个能够检测并指示点光源位置的光源跟踪系统,我们利用直流减速电机来实现地面跟踪系统的旋转定位;利用光电传感器来实现对光源位置的检测追踪;利用MSP430实现对整个系统控制,实现整个系统的协调运作;还有显示模块作为人机界面,实现显示功能。
电光源跟踪系统软件设计

基于单片机msp430的点光源跟踪系统软件设计设计总说明随着太阳能技术的不断成熟,太阳能在人们的生活中扮演越来越重要的角色。
点光源跟踪技术正源于对太阳跟踪的需要。
本设计采用TI公司的MSP430F149单片机作为控制核心。
利用4路光敏三极管(3DU33)来检测点光源的位置并将检测到的信号经过放大传给控制器MSP430F149单片机,经过单片机的运算和处理来确定点光源的运动趋势,并将运算的控制信号传给两台步进电机,使其跟随点光源运动。
当水平方向上的2路光敏三极管测量数值相对接近,同时竖直方向上的2路光敏三极管测量数值也相对接近时,位于竖直传感器中间的激光笔将精确的指向点光源。
同时将光敏三极管检测的信号显示在LCD液晶屏幕上。
该系统主要包含3个模块分别是AD转换模块,LCD显示模块,步进电机控制模块。
其中步进电机的控制是核心,正是通过对步进电机的控制实现对点光源的跟踪,最后会通过proteus进行仿真。
关键词:MSP430;跟踪;AD转换;步进电机;仿真Msp430 microcontroller-based point source tracking systemSoftware DesignDesign DescriptionWith solar energy development, solar energy technologies of the people's lives play more and more important role. some sources of tracing is on the track's needs. The text of the "monolithic integrated circuits to control msp430f149 as the core. Using 4 phototransistor (3DU33) to detect the location of a point source is detected and amplified signal to pass the controller MSP430F149 microcontroller, operation and processing through the MCU to determine trends in the movement of light source, and operation of the control signal transmission to two stepper motors, to follow the point source movement. When the horizontal direction, 2-way phototransistor relatively close to measured values, while 2-way vertical phototransistor on the measured values are relatively close, the sensor is located in the middle of the vertical laser pointer to point to the exact point of light. Phototransistor detected the same time are shown on the LCD liquid crystal screen.This system mainly include three modules is AD conversion module, LCD display module, stepping motor control module. Among them the step motor control is the core, it is through the control of stepping motor of point light realize the tracking. Will finally pass proteus, and simulation of proteus software.Key Words: MSP430; tracking;Ad switch ;stepper motor ; simulation目录1绪论 (1)2硬件组成 (2)2.1MSP430F149简介 (2)2.2步进电机简介 (3)2.2.1步进电机的构造 (4)2.2.2步进电机的运转原理 (4)2.2.3步进电动机的特征 (4)2.3主要电路 (5)2.3.1电流检测电路 (5)2.3.2电机驱动电路 (6)2.3.3 液晶显示电路 (6)2.3.4复位电路 (6)2.3.5 晶振电路 (7)3软件总体方案设计 (8)3.1 C语言基础 (8)3.2 软件开发平台 (9)3.2.1IAR简介 (9)3.2.2IAR应用 (9)3.3主程序模块 (12)3.4信号采集模块 (14)3.5LCD显示模块 (15)3.6步进电机控制模块 (23)4仿真 (26)4.1 Proteus简介 (26)4.2电路仿真 (28)4.3 系统调试结果 (28)5 总结 (31)致谢 (32)参考文献 (33)附录 (34)1绪论当今社会能源日益紧缺,新能源的开发利用成了十分重大的课题。
点光源跟踪系统的研究

点光源跟踪系统的研究[摘要] 本系统采用MSP430F2274作为控制核心,通过键盘修改参数,全面实现了题目中的基本要求和发挥部分要求。
建立二维坐标,使用两个舵机分别控制随动系统垂直方向和水平方向,使得激光笔能够更加快速准确的指向光源,尤其是当光源沿直线运动时。
当光源移动30cm时,随动系统能够快速自动找到光源。
[关键词] MSP430 随动系统实时跟踪伺服电机一、方案比较与论证本设计要求实现随动系统能够定点找到光源,随动追踪光源,光源沿弧线和直线运动时均能够找到光源等。
根据题目要求,本系统由单片机、LED光源、捕获光强、放大电路、舵机等五个模块构成,各模块经过多个方案的比较与论证,最终提出了使系统最优化的整个系统方案。
系统总体框图如图B-1所示。
1、捕获光强系统模块捕获光强系统模块主要由光敏三极管、激光笔组成。
方案一:一维随动系统,采用一个光敏三极管和一个激光笔的方式。
如图B-2所示。
G为光敏三极管J为激光笔光敏三极管G位于激光笔J的上方,两者在垂直方向处于同一直线上,以光敏三极管为中心可水平转动。
初始调整位置时,光敏三极管的轴线与激光笔的轴线要相交于光源B。
光敏三极管接收来自光源B的光照,如图B-3。
首先找到让光敏三极管扫描一次,得到最大电压值Um,从而找到最大的光强位置,即光源。
当光源发生移动时,光敏三极管接收到的光强减小,此时控制随动系统跟踪光源的运动方向进行移动。
此方案电路简单,容易调整三极管和激光笔的初始位置。
但是光源沿直线运动时,光敏三极管和激光头的轴线不可能交与一点,导致跟踪光源时出现偏差。
由于随动系统只能水平转动不能垂直转动,导致当光源沿直线LM移动时,激光笔不能准确的指向光源,存在固有误差图B-3三极管接受光源示意图方案二:二维随动系统。
采用四个光敏三极管成十字形排列,一个激光笔位于十字中心。
如图B-4所示。
图B-4方案二其中采用一个伺服电机控制L和R两个光敏三极管三极管用于沿水平方向捕获光强,另一个伺服电机控制S和X用于沿垂直方向捕获光强,最终寻找的光源位置为水平扫描和垂直扫描的交点。
点光源追踪系统
设 计 任 务
文 献 标 识 码 :A
文 章 编 号 :1 0- 9 3 (0 2 8 0 6 — 2 0 6 7 7 2 1 )0 — 0 4 0
一
、
系 统 检 测 部 分 可 采 用 摄像 头 ,摄 像 头 高 速 扫 描 ,通 过 分
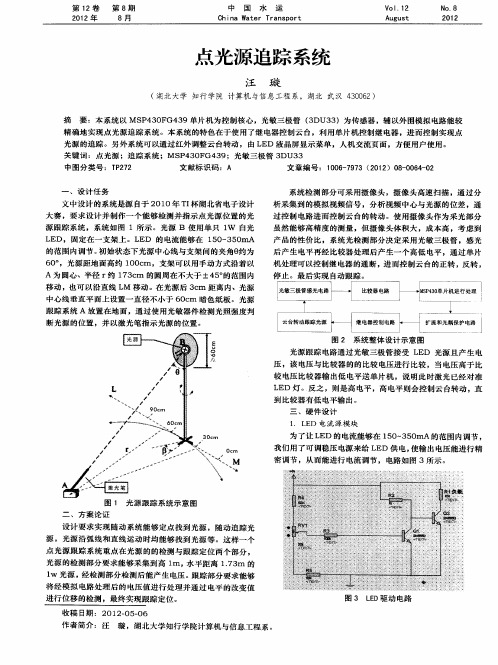
文 中设 计 的系 统 是 源 自于 2 0年 T 杯 湖 北省 电子 设 计 01 I 大 赛 ,要 求 设 计 并 制 作 一 个 能 够 检 测 并 指 示 点 光源 位 置 的 光
进行位移的检测 ,最终实现跟踪 定位 。
收 稿 日期 :2 2 0 — 6 01 — 50
图 3 L D驱 动 电路 E
作者简介:汪
璇 ,湖北大 学知行 学院计算机与信息工程系 。
第 8期
汪
璇 :点 光 源 追 踪 系 统
6 5
在 硬件 调 试 中调 节 变 阻器 R ,可 看 到 负载 R1上 的 电 V1 流 逐 步 变化 ,变 化 范 围可 达 到 1 0 3 0 , 同 时 也可 观 察 2 - 7 ma 到 L D 灯 的 亮度 逐 渐 增 强 。从 而 实 现 L E ED 灯 电流 变 化 下 的 扫 描 与 跟踪 定 位 。
0e a r
我们 用 了可 调 稳 压 电源 来 给 L D 供 电 , 输 出 电压 能 进 行 精 E 使 密 调节 ,从 而 能 进 行 电流 调 节 , 电路 如 光 源 跟 踪 系 统 示 意 图
二 、方 案 论 证
设 计 要 求 实现 随 动 系 统 能 够 定 点 找 到 光 源 ,随 动 追 踪 光
源 跟 踪 系 统 , 系统 如 图 1所示 。 光源 B 使 用 单 只 l 自光 W
光敏三极管的识别与检测

光敏三极管的识别与检测展开全文光敏三极管是在光敏二极管的基础上产生的一种具有放大功能的光敏器件,在电路中多用VT 表示。
常见的光敏三极管的实物外形和电路符号如下图所示。
1.光敏三极管的分类与特点光敏三极管按构成可分为 NPN 型和 PNP 型两种,按放大能力光敏三极管可分为普通型和达林顿型两种。
光敏三极管的工作原理可等效为光敏二极管和普通三极管的组合,如下图所示。
如图中所示,b、c 极间的 PN 结就相当于一个光敏二极管,有光照时,光敏二极管导通,由其产生的导通电流I L 输入到三极管的b极,使三极管导通,它的c 极流过的电流就是c 极电流I c(βI L)。
由于光敏三极管的b极输入的是光信号,所以它的外部仅有c、e极两个引脚。
2.光敏三极管的主要参数(1)最高工作电压U ceo最高工作电压是指在无光照的状态下,c、e 极间漏电流未超过规定电流(0.5μA)时,光敏三极管所允许施加的最高工作电压,范围通常在10~50V。
下标中的“o”表示光敏三极管的 b 极开路。
(2)暗电流I D暗电流是指光敏三极管在无光照时c、e 极间的漏电流,一般小于1μA。
(3)光电流βI L光电流是指在有光照时光敏三极管的 c 极电流,一般为几毫安。
(4)最大允许功耗P cm最大允许功耗是指光敏三极管在不损坏的前提下所能承受的最大功耗。
3.光敏三极管的检测(1)光敏三极管引脚的识别普通光敏三极管靠近管键(外壳上突出部位)的引脚或者比较长的引脚为e 极,达林顿型光敏三极管靠近外壳平口的引脚是 c 极。
(2)光敏三极管暗电阻的检测首先,用黑胶布或黑纸片将光敏三极管的受光窗口包住,再将万用表置于“R×1k”挡,测c、e 极间的正、反向电阻,阻值都应为无穷大。
若有阻值,说明其漏电;若阻值为 0,说明其已击穿。
(3)光敏三极管亮电阻的检测首先,让光线照到光敏三极管的受光窗口上,再将万用表置于“R×1k”挡,用黑表笔接c 极,红表笔接e极,测c、e 极间的正、反向电阻,阻值应为10~30kΩ。
点光源跟踪设计报告

“点光源跟踪系统”的设计与实现摘要:本点光源跟踪系统由MSP430F5438单片机、bh1750fvi-e光强传感器,LED 灯和云台等组成闭环控制系统,主要模块有LED驱动电路模块、云台控制模块和光能检测模块。
在芯片TPS61062控制的驱动电路作用下产生电流可调的点光源,通过光能检测模块比较各方位光照强度,控制不同继电器的导通从而控制云台向某个方向转动,实现追光功能。
而且,需要校准时也可以用红外进行手动调节。
关键词:MSP430单片机,光能检测,云台控制“The point source Tracking System” 的设计与实现Abstract:The point source tracking system by the MSP430F5438 MCU, bh1750fvi-e light intensity sensors, LED lights and head composed of closed-loop control system, the main module has LED driver circuit module, PTZ control module and the light detection module. TPS61062 chip under the control of drive circuit produces current adjustable light source, light detection module by the parties to place light intensity compared to control conduction of different relays to control head rotation in a certain direction, to achieve functional recovery of light. Moreover, the need for calibration can also be adjusted manually using infrared.Key Words:MSP430 microcontroller, light detection, PTZ control一、方案比较与论证1、LED驱动模块的方案比较与论证方案一:用电源直接在LED的两端加一个电压使LED发光,但这样需要一个可调电压源,通过调节电压来改变LED的电流,从而实现亮度的调节,由于电压的调节很难实现精确的步进,使得这种调节方式线性度很差,给我们监测电流造成了一定的难度,而且这种方案容易损坏LED灯,故未采用此方案。
光源自动跟踪系统报告
2012年广西大学生电子设计竞赛光源自动跟踪系统(F题)摘要系统采用8位单片机STC89C52作为智能小车系统检测和控制的核心,通过2光敏传感器来对1W的LED白光来感光最强的点进行跟踪,当LED灯随着给小车的行走,通过步进电机支架上的2光敏传感器控制步进电机转动,来对不同感光最强的点进行跟踪从而实现检测并指示点光源位置的模拟光伏发电太阳光自动跟踪系统功能。
硬件系统采用最为精简的电路模块搭建,软件系统使用模块化编程。
硬件由电源电路、单片机最小系统模块、电机驱动电路、循迹引导电路等组成。
,最终实现了能够检测并指示点光源位置的模拟光伏发电太阳光自动跟踪系统功能,测试表明各项指标基本符合设计任务要求。
关键词:STC12C5A60S2单片机、L298N电动机、循迹。
显示屏。
光源、跟踪、检测、激光笔、白光LED目录一、系统设计要求 (2)1.1 任务 (2)1..2设计相关要求 (2)1.2.1.. 基本要求 (3)1.2.1 发挥部分 (3)二、系统方案论证与选择 (3)2.1系统基本方案 (5)2.2系统各模块的最终方案 (5)三、系统的硬件设计与实现 (5)3.1系统硬件的基本组成部分 (5)3.2主要单元电路的设计 (6)3.2.1电源电路 (6)3.2.2 控制电路 (6)3.2.3循迹电路 (7)3.2.4电机驱动电路 (8)3.2.5 显示屏1602 (8)3.2.6 光敏传感器 (9)3.2.7 HB7128电机步进 (10)四、系统软件的设计………………………………………………………………五、系统测试…………………………………………………………………………六、总结…………………………………………………………………………………一、系统要求设计智能车辆是集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,是智能交通系统的一个重要组成部分,其设计主要集机械、电子、检测技术与智能控制于一体,是机器人研究领域的一项重要内容,在军事、民用、太空开发等领域有着广泛的应用前景,且其智能技术广泛运用于各种领域。
点光源跟踪器
点光源跟踪器【摘要】:本点光源跟踪器主要组成模块有主控制模块、光照检测模块、光驱动模块、继电器控制模块等。
主要芯片是MSP430F4270单片机、白光驱动TPS61062、光敏三极管3DU33、运放TLV2711和云台激光笔等组成的系统。
能够实现跟踪点光源的功能。
在1W的白光LED光照条件下,光能检测模块将光强转换为电压,单片机的SD 对电压采样比较,然后选择输出高电平。
这个高电平会使相应的继电器工作,则云台转动,使光电检测部分指向点电源的正确位置。
一、系统方案方案一:采用目前比较通用的51系列单片机。
此单片机的运算能力强,软件编程灵活,自由度大。
虽然该系统采用单片机为核心,能够实现对外围电路的智能控制部件。
由于光强度的变化是微小的变化,单片机为达到设计精度的要求,外围电路必须加上12位的A/D,这使得整个系统硬件电路变得复杂,而且12位的A/D器件价格较高,使得系统的性价比偏低。
方案二:采用TI的16位MSP430F4270单片机。
此单片机功能较强、兼容性好、性价比高;易扩展、可靠性、功耗小以及具有较高的数据处理和运算能力,系统时钟频率高,运行速度快,而且由于MSP430F5438单片机内部集成了16位的SD模/数转换器,不需外加模/数转换器,就可以很精确地将光强度的变化转换为电压值。
通过采样取样,结合内部A/D,构成闭环反馈调整控制。
此种方案既能实现智能化的特点,简化硬件电路,提高测量精度,同时也能利用软件对测量误差进行补偿,这给调试、维护和功能的扩展,性能的提高,带来了极大的方便。
鉴于上面考虑,我们采用第二个方案。
根据题目要求系统框图如下:图1系统框图系统工作原理:系统是由主控制模块、光照检测模块、光驱动模块、继电器控制模块等组成。
打开电源,操作单片机使白光LED 在300mA 下工作,用两对光敏三极管分别监测左右,上下的光强信号。
光电采集模块将光度强弱信号转换为电压值(三极管感应到的光度越强则采样的电压会越大),然后单片机16位的SD 对其中一对电压采样并比较两值的大小,当这两个电压值之差超过一定的门限,这时单片机输出高低电平,控制继电器的工作,使云台向光度强的方向运动。
点光源追踪系统报告---不加学号
2010年陕西省第二届大学生德州仪器(TI)杯模拟及模数混合电路应用设计竞赛参赛队编号(参赛学校填写)学校编号组(队)编号选题编号B点光源跟踪系统设计报告摘要:该系统由主控电路、采样调理电路、光源支架、光源跟踪电路、电源模块电路、液晶显示电路等六部分组成。
我们采用TI公司推出的Cortex-M3系列LM3S811为主控芯片,以及光敏三极管(3DU5C)采集LED灯光强度的方案实现对点光源的跟踪。
我们创造性的采用LM3S811芯片特有的过采样功能,能够对多达连续64次的采样作出平均计算,有效消除采样结果的不均匀性,实现激光笔对点光源的精确追踪。
采用内部看门狗实现了在调节点光源LED电流后,在不改变电路参数和工作模式的情况下,激光笔依然能自动跟踪点光源。
通过LM317的输出电压可控来调节点光源的电流大小,满足题目要求。
关键词:LM3S811 光敏三极管过采样自动跟踪一、系统方案论证1.主控芯片选择方案我们选择了TI公司推出的Cortex-M3系列LM3S811为主控芯片。
2.光敏器件选择方案题目要求检测环境是正常光照,在有一定正常室内光照干扰的情况下,需要采用对点光源敏感的器件。
方案一:采用传统方法使用光敏电阻检测光强。
方案二:采用光敏三极管(SDU5C)检测光源方案分析:方案一中的光敏电阻只能对有无光照进行检测,无法对光的强度进行检测,在正常室内光照的环境下,对点光源并不敏感。
而光敏三极管对光强非常敏感,除了可以实现光 -电转换外,还能放大光电流,我们也通过采样的数据分析证明光敏三极管可以在正常室内光照下有效的对点光源的强度变化进行检测,能满足题目要求,故选择方案二。
3.点光源供电方案方案一:利用Cortex-M3控制DA芯片TLC5615产生稳定0-3.3V稳定电压,但输出电压在空载与加负载的情况下有很大区别,不能在有负载情况下实现稳定的电流输出,达不到300mA。
方案二:利用LM317产生可控电压对LED点光源供电。
4-点光源跟踪系统(报告)(光敏三极管检测与放大电路)

点光源跟踪系统【摘要】:本系统设计以MSP430F169微处理器为控制器点光源自动跟踪系统,点光源跟踪系统由光源检测控制和点动光源两大部分组成。
光源检测控制通过单片机控制两个步进电机,实现激光笔左右上下两个方向运动,可实现精准跟踪光源,点动光源用恒流源控制1W LED发光,光敏三极管构成检测光源位置电路。
系统使用NOKIA3510彩色液晶显示,不仅美观,而且菜单显示使系统可视化。
本系统结构简单,功能强大,系统稳定。
关键词:步进电机MSP430F169 NOKIA3510 光敏三极管一系统整体方案确立与单元模块方案论证及比较本题任务设计并制作一个能够检测并指示点光源位置的光源跟踪系统。
自动跟踪系统要实现检测光源和跟踪光源,通过光敏器件检测光照强度判断光源的位置,辅以微处理器控制电机,电机控制激光笔的左右上下运动来跟踪光源。
有以下两种总的方案可供选择:(1)电机的选择方案论证方案一:实用云台机构。
利用全方位云台内部的两个电机,分别控制激光笔上下、左右转动;这种方案的优点是控制起来较比较方便,机械性能较好,但是市场上云台价格较贵,由于云台通过同步电机实现转动,运动惯性比较大,不易控制。
方案二:控制步进电机。
利用两个步进电机,分别控制激光笔上下、左右向的转动;步进电机控制方便,驱动电路设计容易。
这种方案的优点是经济。
综上所述:考虑到激光笔上下左右运动的角度非常微小,而且步进电机便宜,故选用方案二。
(2)电机驱动模块选择方案一:采用专用芯片L298N作为电机驱动芯片。
L298N是一个具有高电压大电流的全桥驱动芯片,它工作频率高,一片L298N可以控制1个步进电机,而且还带有控制使能端。
用该芯片作为电机驱动,操作方便,稳定性好,性能优良。
方案二:用分立元件构成驱动电路。
由分立元件构成电机驱动电路,结构简单,价格低廉,在实际应用中应用广泛。
但是这种电路工作性能不够稳定。
方案三:用高耐压、大电流达林顿陈列—ULN2003做驱动电路。
点光源跟踪系统--设计报告

点光源跟踪系统(题目)一、任务设计并制作一个能够检测并指示点光源位置的光源跟踪系统,系统示意图如图1所示。
光源B使用单只1W白光LED,固定在一支架上。
LED的电流能够在150~350mA的范围内调节。
初始状态下光源中心线与支架间的夹角θ约为60º,光源距地面高约100cm,支架可以用手动方式沿着以A为圆心、半径r约173cm 的圆周在不大于±45º的范围内移动,也可以沿直线LM移动。
在光源后3 cm 距离内、光源中心线垂直平面上设置一直径不小于60cm暗色纸板。
光源跟踪系统A放置在地面,通过使用光敏器件检测光照强度判断光源的位置,并以激光笔指示光源的位置。
图1 光源跟踪系统示意图二、要求1.基本要求(1)光源跟踪系统中的指向激光笔可以通过现场设置参数的方法尽快指向点光源;(2)将激光笔光点调偏离点光源中心30cm时,激光笔能够尽快指向点光源;(3)在激光笔基本对准光源时,以A为圆心,将光源支架沿着圆周缓慢(10~15秒内)平稳移动20º(约60cm),激光笔能够连续跟踪指向LED点光源;2.发挥部分(1)在激光笔基本对准光源时,将光源支架沿着直线LM平稳缓慢(15秒内)移动60cm,激光笔能够连续跟踪指向光源。
(2)将光源支架旋转一个角度β(≤20º),激光笔能够迅速指向光源。
(3)光源跟踪系统检测光源具有自适应性,改变点光源的亮度时(LED驱动电流变化±50mA),能够实现发挥部分(1)的内容;(4)其他。
三、说明1.作为光源的LED的电流应该能够调整并可测量;2.测试现场为正常室内光照,跟踪系统A不正对直射阳光和强光源;3.系统测光部件应该包含在光源跟踪系统A中;4.光源跟踪系统在寻找跟踪点光源的过程中,不得人为干预光源跟踪系统的工作;5.除发挥部分(3)项目外,点光源的电流应为300±15 m A;6.在进行发挥部分(3)项测试时,不得改变光源跟踪系统的电路参数或工作模式;点光源跟踪系统(报告)摘要:本方案所涉及的点光源跟踪系统采用光敏三级管来检测点光源,并且利用比较比较器来判断电压高低,从而获知各个光敏传感器接收到的光的强弱来判断点光源的位置。
点光源跟踪系统课程设计
指导教师评定成绩:审定成绩:重庆邮电大学自动化学院计算机控制技术课程设计报告设计题目:光源随动系统单位(二级学院):学生姓名:专业:班级:学号:指导教师:设计时间: 2013 年 6 月邮电大学自动化学院制摘要本设计给出了一种基于单片机的点光源自动跟踪系统设计方案, 该设计使用TI公司的超低功耗的AT89C52单片机作为整个系统的控制核心,主要由电机驱动模块,点光源检测模块,电源转换模块等模块组成。
利用8路光敏电阻来检测点光源的位置并将检测到的信号经过放大后进行AD转换,将转换的结果传给控制器AT89C52单片机,经过过单片机的运算和处理来确定点光源的运动趋势,并将运算的控制信号控制两台步进电机,使其跟随点光源运动。
本设计可以扩展为以后的太阳能发电的自动跟踪系统。
该系统不仅能自动根据太方向来调整太阳能电池板朝向, 结构简单、成本低, 而且在跟踪过程中能自动记忆和更正不同时间的坐标位置, 不必人工干预, 特别适合天气变化比较复杂和无人值守的情况, 有效地提高了太阳能的利用率, 有较好的推广应用价值。
关键词:AT89C52单片机、光源、自动跟踪、传感器.目录摘要..................................... 错误!未定义书签。
目录.. (3)一设计题目 (4)1.1 基于单片机的光源自适应控制系统设计 (4)1.2 设计要求 (4)二设计报告正文 (5)2.1 设计方案总体方向的选择 (5)2.1.1 系统方案的拟定 (5)2.1.2 方案选择 (5)2.2 硬件电路的设计 (6)2.2.1 A/D转换模块 (6)2.2.2 步进电机模块 (9)2.2.3 电机驱动模块 (11)2.2.4 检测模块 (13)2.2.5 单片机模块 (14)2.3 系统软件设计 (18)三总体调试 (19)3.1 总体调试 (19)3.2 问题及解决方案 (19)3.2.1 通道比较阀值的设置 (19).3.2.2 电机的防抖 (19)四设计总结 (20)五参考文献 (21)六附录 (22).一、设计题目1.1基于单片机的光源自适应控制系统设计设计一控制系统,假设有一个太阳能电池板,为了使电池板最大限度的接受光照强度,通过控制器调节电池板的角度使电池板始终正对光线。
实验4:光敏三极管特性实验
实验4:光敏三极管特性实验光敏三极管特性实验(一)实验目的(1)了解光敏三极管结构与工作原理。
(2)掌握光敏三极管性能、特性的测试方法。
(二)实验器件与单元CSY2000G光电传感器实验台、光电器件实验(一)模板、光敏三极管、光源、滤色镜、照度计模板、光照度计探头(三)基本原理在光敏二极管的基础上,为了获得内增益,就利用晶体三极管的电流放大作用,用Ge或Si单晶体制造NPN或PNP型光敏三极管。
其结构使用电路及等效电路如图1所示。
图1 光敏三极管结构及等效电路光敏三极管可以等效一个光电二极管与另一个一般晶体管基极集电极并联:集电极-基极产生的电流,输入到共发三极管的基极在放大。
不同之处是,集电极电流(光电流)有集电结上产生的iφ控制。
集电极起双重作用;把光信号变成电信号起光电二极管作用;使光电流再放大起一般三极管的集电结作用。
一般光敏三极管只引出E、C两个电极,体积小,光电特性是非线性的,广泛应用于光电自动控制作光电开关应用。
(四)实验步骤1.光敏三极管伏安特性光敏三极管在不同的照度下的伏安特性就象一般晶体管在不同的基极电流输出特性一样。
光敏三极管把光信号变成电信号。
(1)将图3-1中的光敏二极管换成光敏三极管,按图接线,(注意接线孔颜色相接主机箱电压表Vcc光敏器件光敏接收器件或光源光电器件实验(一)接主机箱可调0-5v+0-5V可调光敏器件输入光敏接收器件硅光电池接主机箱电流表光敏二极管主机箱遮光筒光源+0-12V可调升降杆升降固定螺钉移块图3-1光敏二极管实验对应)主机箱的电流表的量程在实验过程需要进行切换,从μA到mA 档,电压表的量程为20v档。
(2)首先慢慢调节0~12V光源电压,使光源的光照度在某一照度值(2、4、6、8 lX),再调节主机箱0-5v电源改变光敏三极管的电压,测量光敏三极管的输出电流和电压。
填入表1~表4,并作出一定光照度下的光敏三极管的伏安特性曲线(可多做几组族线)表1 在2lX照度下U1(V) I1(mA) 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 表2 在4lX照度下U1(V) 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 I1(mA) 表3 在6lX照度下U1(V) I1(mA) 0 0.5 1.0 1.5` 2.0 2.5 3.0 3.5 4.0 4.5 5.0 表4 在8lX 照度下U1(V) I1(mA) 0 I(mA)外加电压(V)图2 光敏三极管伏安特性实验曲线 2.光敏三极管的光照特性测量将图3-1中的光敏二极管换成光敏三极管接线(注意接线孔的颜色相对应),测量光敏三极管的暗电流和亮电流。
2013点光源跟踪系统-推荐下载

点光源跟踪系统
1
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电通,力1根保过据护管生高线产中0不工资仅艺料可高试以中卷解资配决料置吊试技顶卷术层要是配求指置,机不对组规电在范气进高设行中备继资进电料行保试空护卷载高问与中题带资2负料2,荷试而下卷且高总可中体保资配障料置各试时类卷,管调需路控要习试在题验最到;大位对限。设度在备内管进来路行确敷调保设整机过使组程其高1在中正资,常料要工试加况卷强下安看与全22过,22度并22工且22作尽22下可护都能1关可地于以缩管正小路常故高工障中作高资;中料对资试于料卷继试连电卷接保破管护坏口进范处行围理整,高核或中对者资定对料值某试,些卷审异弯核常扁与高度校中固对资定图料盒纸试位,卷置编工.写况保复进护杂行层设自防备动腐与处跨装理接置,地高尤线中其弯资要曲料避半试免径卷错标调误高试高等方中,案资要,料求编试技5写、卷术重电保交要气护底设设装。备备置管4高调、动线中试电作敷资高气,设料中课并技3试资件且、术卷料中拒管试试调绝路包验卷试动敷含方技作设线案术,技槽以来术、及避管系免架统高动然中过停语程机文中。电高因气中此课资,件料电中试力管卷高壁电中薄气资、设料接备试口进卷不行保严调护等试装问工置题作调,并试合且技理进术利行,用过要管关求线运电敷行力设高保技中护术资装。料置线试做缆卷到敷技准设术确原指灵则导活:。。在对对分于于线调差盒试动处过保,程护当中装不高置同中高电资中压料资回试料路卷试交技卷叉术调时问试,题技应,术采作是用为指金调发属试电隔人机板员一进,变行需压隔要器开在组处事在理前发;掌生同握内一图部线纸故槽资障内料时,、,强设需电备要回制进路造行须厂外同家部时出电切具源断高高习中中题资资电料料源试试,卷卷线试切缆验除敷报从设告而完与采毕相用,关高要技中进术资行资料检料试查,卷和并主检且要测了保处解护理现装。场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
一种改进的点光源跟踪系统设计与实现

一种改进的点光源跟踪系统设计与实现赵广元;汪志伟【摘要】提出一种改进的点光源跟踪方案,采用MSP430F149作为主控制器,分光源发送端和光源跟踪端两部分研究.发送端发送1KHz频率的光,跟踪端用光敏三极管检测点光源信号,对其进行1KHz的带通滤波和A/D转换,然后分析点光源的移动方向,并控制舵机跟踪点光源.软件部分用基本控制和中心控制两种算法互相补充、交叉控制,提升了系统性能.测试结果表明,系统跟踪快速且准确、运行稳定.【期刊名称】《电子设计工程》【年(卷),期】2014(022)011【总页数】4页(P35-38)【关键词】点光源跟踪;光信号检测;巴特沃兹滤波器;MSP430【作者】赵广元;汪志伟【作者单位】西安邮电大学陕西西安710021;西安邮电大学陕西西安710021【正文语种】中文【中图分类】TN713光推动着人类的社会进步,对光的有效利用,一直是科研人员的努力方向。
在自动化技术高速发展的今天,对光信号的检测与跟踪有着广泛的应用价值。
文[1]和文[2]所设计的点光源跟踪系统,均能基本实现对点光源的基本跟踪,但是它们的检测部分采用了灵敏度不高的光敏二极管。
文[3]通过光敏三极管检测光信号,在一定程度上提升了光源跟踪系统的精度。
但上述文献均片面地对光强度进行分析,导致系统受外界光线影响较大,特别是在某些需对特殊光信号进行精确跟踪的情况下,这些装置的应用有局限。
文[4]设计了一种自适应带通滤波器,能用来对特定频率的信号进行自动跟踪,但并未将带通滤波技术应用到光源跟踪系统中。
为此,本文拟利用带通滤波器实现对特定频率点光源信号的提取,通过光敏三极管检测光信号,设计一种改进的点光源跟踪装置,并在此基础上提出对应的控制算法,期望达到在抑制外界光线的干扰的同时,实现对点光源精确跟踪的效果。
系统由光源发送端和光源跟踪端两部分组成,两部分均以TI公司的MSP430F149单片机作为主控制器[5-6]。
发送端采用4片TPS61062芯片并联,使驱动电流达到350 mA以驱动1W的LED发出频率为1KHz的方波光信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点光源跟踪系统【摘要】:本系统设计以MSP430F169微处理器为控制器点光源自动跟踪系统,点光源跟踪系统由光源检测控制和点动光源两大部分组成。
光源检测控制通过单片机控制两个步进电机,实现激光笔左右上下两个方向运动,可实现精准跟踪光源,点动光源用恒流源控制1W LED发光,光敏三极管构成检测光源位置电路。
系统使用NOKIA3510彩色液晶显示,不仅美观,而且菜单显示使系统可视化。
本系统结构简单,功能强大,系统稳定。
关键词:步进电机MSP430F169 NOKIA3510 光敏三极管一系统整体方案确立与单元模块方案论证及比较本题任务设计并制作一个能够检测并指示点光源位置的光源跟踪系统。
自动跟踪系统要实现检测光源和跟踪光源,通过光敏器件检测光照强度判断光源的位置,辅以微处理器控制电机,电机控制激光笔的左右上下运动来跟踪光源。
有以下两种总的方案可供选择:(1)电机的选择方案论证方案一:实用云台机构。
利用全方位云台内部的两个电机,分别控制激光笔上下、左右转动;这种方案的优点是控制起来较比较方便,机械性能较好,但是市场上云台价格较贵,由于云台通过同步电机实现转动,运动惯性比较大,不易控制。
方案二:控制步进电机。
利用两个步进电机,分别控制激光笔上下、左右向的转动;步进电机控制方便,驱动电路设计容易。
这种方案的优点是经济。
综上所述:考虑到激光笔上下左右运动的角度非常微小,而且步进电机便宜,故选用方案二。
(2)电机驱动模块选择方案一:采用专用芯片L298N作为电机驱动芯片。
L298N是一个具有高电压大电流的全桥驱动芯片,它工作频率高,一片L298N可以控制1个步进电机,而且还带有控制使能端。
用该芯片作为电机驱动,操作方便,稳定性好,性能优良。
方案二:用分立元件构成驱动电路。
由分立元件构成电机驱动电路,结构简单,价格低廉,在实际应用中应用广泛。
但是这种电路工作性能不够稳定。
方案三:用高耐压、大电流达林顿陈列—ULN2003做驱动电路。
ULN2003是高耐压、大电流达林顿陈列,由七个硅NPN 达林顿管组成。
U LN2003 工作电压高,工作电流大,灌电流可达500mA,并且能够在关态时承受50V 的电压,输出还可以在高负载电流并行运行。
由于ULN2003结构简单,价格便宜,具有7路输出电流可达500毫安能够驱动步进电机。
考虑性价比、电路结构等,系统选用方案三。
(3)检测光照强度模块的选择方案一:采用多个光敏电阻。
根据AD转换后通过单片机处理反馈于电机驱动来调整激光笔的跟踪,但光敏电阻的检测距离很近,达不到题目的要求。
方案二:采用多个光敏三极管。
根据AD转换后通过单片机处理反馈于电机驱动来调整激光笔的跟踪。
光敏三极管的灵敏度好,检测距离远。
考虑到2m的距离,故选用方案二。
根据上面的方案论证,本系统整体框图如图1所示。
图1 系统整体框图二 理论计算与分析由于点光源在15秒内要以A 为圆心、半径r 约173cm 的圆周在不大于±45º的范围内移动,也就是说15秒内左右运动的电机只转1/4圈,90度。
当电光源运动到不同的位置,点光源与激光笔连线的角度变化,如图2所示:图2 点光源不同位置转动集合示意图 图3 机械结构简单示意图 点光源在原点时,点光源与激光笔连线的角度为1arctan arctan 301.73OB OA θ⎛⎫⎛⎫==≈⎪ ⎪⎝⎭⎝⎭。
点光源沿直线LM 左移30cm 时,点光源与激光笔连线的角度为AM 1.757OB 1arctan =arctan 29.63AM 1.757=≈⎛⎫⎛⎫=≈ ⎪ ⎪⎝⎭⎝⎭。
α 点光源与激光笔连线的角度减小θ=0.4°。
由此可见,左右转动角度大,上下转度角度小。
对于电机不可能精确转动这么小的角度,因此在机械结构进行改造。
如图3所示,用步进电机带动尼龙线拉板上移。
经测量步进电机轴周长L 为1.2cm ,距离转轴d= 8.3cm 。
1X=tan *d tan d tan 30*8.3tan 29.3*8.30.13X n =0.Lθ-=-==。
α*上下移动电机只转1/10圈。
对于步进电机可实现。
上下电机拉力只带动底部电机,提供力矩足够大。
为了避免尼龙线弹性,在板子加上50g 的物体。
为了实现慢速精准跟踪光源我们选择型号28BYJ48的步进电机,它的步距角5.625°,1/64的减速比,启动转矩>300g/cm 。
三、电路与程序设计3.1 电路的设计1)电机驱动电路的设计采用ULN2003做驱动。
信号输入端加上拉电阻以提高输入驱动电流。
电路图如4:+5v+3.3V图4步进电机驱动原理图 图5光敏三极管检测光强原理图2)检测光照强度电路的设计采用高灵敏度光敏三极管来检测光照强度,三极管扩大电流的作用。
电路图如5:对于点光源的检测,除了使用高灵敏度的三极管外,三极管的数量和布局的选择也至关重要,在本系统中,三极管的布局采用图6的形式,四个光敏三极管分别检测上下左右四个方位的光强,根据光强来判断光源的位置,进而驱动激光笔的运动。
图6 光敏三极管排列示意图3)系统电源的设计采用2路稳压芯片TL780-05,将电池电压稳压成2路5v 电源,一路专为电机供电,一路为外围电路供电及稳压芯片供电。
同时将其中一路5v 电压通过稳压芯片AMS1117-3.3稳压到3.3v ,为3.3v 外围电路供电。
4)LED 供电恒流源的设计恒流源通过开关电源获得,PWM控制芯片选用UC3525,通过调整PWM辅以反馈电路,使得电流恒定。
改变反馈,来调整电流的值。
通过继电器切换不同采样点来实现负载的恒压、恒流控制。
3.2程序设计1)系统流程图如图7所示系统初始化包括单片机的端口初始化,AD初始化,液晶初始化,及步进电机的初始化,然后进入键盘中断,选择相应的菜单进入不同的子菜单。
子菜单主要包括现场设置及寻光追踪。
2)现场设置流程图如图8所示通过按键上下左右调整使激光头快速找到光源。
3)寻光追踪子流程图如图9所示AD采样,比较1号和3号AD值,使激光笔上下运动。
比较2号和4号AD 值,使激光笔左右运动。
图7系统流程图图8 现场设置子程序流程图 图 9 寻光追踪子程序流程图四、系统测试1、测试仪器1)自制点光源:电光源距地面1m ,以LED 为圆心,半径为60cm 的圆盘,将LED 聚光处理。
2)卷尺:1个,精度1mm 。
3)秒表:1个,精度0.01mm4)三路直流稳压稳流电源:2个,SG1732SC3A 5)万用表:2个 ,MAS8300L 6)电池 2200 m A.h 7.2V 2、 测试结果与分析1)通过设置上下左右键控制电机上下左右运动,可以很快使激光笔光束准确对准电光源。
2) 激光笔光点调偏离点光源中心30cm ,电流为 300m A 。
测试结果如下:表3 右移中心30cm表4 下移中心30cm结果分析:上下偏移校正时,偏离中心位置比左右校正时要小,但对准时间要长,主要因为上下控制电机转动角度比左右控制电机转动角度大很多。
有时,偏差很大有外界干扰。
3)沿圆弧移动,测试结果如下:第一次 能够成功追随光源移动,最大偏移5cm ,时间为8S 。
第二次 能够成功追随光源移动,最大偏移8cm ,时间为9S 。
第三次 能够成功追随光源移动,最大偏移6cm ,时间为8.6S 。
结果分析:偏移量有点大主要因为手动操作时快时慢,造成偏移量大。
4)沿直线LM 左右移30cm ,测试结果如下:第一次 能够成功追随光源移动,最大偏移5cm ,时间为10S 。
第二次 能够成功追随光源移动,最大偏移8cm ,时间为9.5S 。
第三次 能够成功追随光源移动,最大偏移4cm ,时间为11S 。
5)将电光源向左移动20cm ,左右偏移β角度约20°,测试结果如下: 点光源左偏移20°左右时,经过三次测量,能够成功寻到光源。
点光源右偏移20°左右时,经过三次测量,能够成功寻到光源。
测量结果如表5、表6所示:表5 左偏移20° 表6 右偏移20°6)改变电流,是电流在250m A 。
沿直线LM 左右移30cm ,测试结果如下 第一次 能够成功追随光源移动,最大偏移5cm 。
第二次 能够成功追随光源移动,最大偏移7cm 。
第三次 能够成功追随光源移动,最大偏移4cm 。
五、 总结本次设计在硬件上,电路结构比较简单,在软件上连续改进及调试能够基本实现系统所设的要求,并且寻光范围大,适应能力比较好,寻光速度快。
时间有限, 四天三夜,系统设计不够完美,但最终还是完成点光源跟踪系统。
附录:(1)TI芯片列表MSP430F169 1片TL780-05KCS 2片INA128P 1片OP07CP 3片(2)原理图1. A区域电路原理图设计2. 恒流源的设计原理图恒流源通过开关电源获得,PWM控制芯片选用UC3525,通过调整PWM辅以反馈电路,使得电流恒定。
改变反馈,来调整电流的值。
通过继电器切换不同采样点来实现负载的恒压、恒流控制。