第章变频调速拖动系统
普通车床的变频调速系统改造设计
目录摘要 (4)第一章交流变频调速器 (4)1.1变频调速器的基础知识 (4)1.1.1变频器的变频与变压 (5)1.1.2变频器的构成与功能 (6)第二章通用变频器的介绍 (7)2.1变频器的组成与功能 (7)2.1.1主控电路 (8)2.1.2面板控制器 (8)2.1.3外接给定与输入控制端 (8)2.2 变频器的主要外接电路 (8)2.2.1外接主电路的结构 (9)2.2.2正反转控制电路 (12)2.3 变频器的主要参数简介 (10)2.3.1启停控制方式 (10)2.3.2与频率设定相关的参数 (11)2.3.3频率给定方式 (11)234变频器的控制方式 (11)235变频器参数 (11)236PID调节功能参数 (12)237报警与故障参数 (12)第三章金属切削车床的变频系统 (12)3.1主运动的负载性质及对主拖动系统的要求 (13)3.1.1主运动的负载性质 (13)3.1.2主运动对主拖动系统的要求 (13)3.1.3电气原理图: (13)3.1.4硬件接线图: (15)3.2 变频调速系统的设计方案 (16)3.2.1变频器的容量选择 (16)3.2.2变频器控制方式的选择 (16)3.3 变频器调速控制系统及其工作过程 (17)3.3.1变频器接线 (17)3.3.2继电器控制电路 (20)结束语 (21)参考文献 (22)附表一..................................... 错误!未定义书签。
附表二 (22)摘要随着变频技术的提高,交流电动机的应用越来越广泛,采用变频调速,可以提高生产机械的控制精度、生产效率和产品质量,有利于实现生产过程的自动化,使电力拖动系统具有优良的控制性能,而且在许多生产场合具有显著的节能效果。
变频调速的核心设备是变频调速器,变频器与电动机的控制配合构成了变频调速系统。
传统的金属切削车床速度控制为人工换挡,调速范围有限,调速精度低,而电机始终在额定转速运行,利用效率差,齿轮箱体积庞大复杂,电器控制部分故障较多。
变频调速在桥式起重机拖动系统中的应用

变频调速在桥式起重机拖动系统中的应用作者:耿俊超来源:《中国新技术新产品》2013年第08期摘要:变频调速技术应用到桥式起重机上,弥补了原有继电——接触器控制的缺点,实现了桥式起重机拖动系统的各档速度、加速时间和制动减速时间都可根据现场情况由变频器设置,调整方便。
负载变化时,各档速度基本不变,调速性能好。
关键词:变频调速;桥式起重机;应用中图分类号:TN77 文献标识码:A1概述桥式起重机是工矿企业中应用十分广泛的一种起重机械,桥式起重机,使用频繁,环境恶劣,高温、金属粉尘过多。
桥式起重机电力拖动系统多采用绕线式交流异步电机,转子回路内串入多段外接电阻调速,采用凸轮控制器、继电器、接触器控制。
这种控制系统主要缺点是:(1)桥式起重机工作环境恶劣,工作任务重,电动机以及所串电阻烧损和断裂故障时有发生。
(2)继电——接触器控制系统可靠性差,操作复杂,故障率高。
(3)转子串电阻调速,机械特性软,负载变化时转速也变化,调速不理想。
所串电阻长期发热,电能浪费大,效率低。
要从根本上解决这些问题,只有彻底改变传统的控制方式。
(4)由于现场环境中的金属粉尘、有害气体对电动机集电环、继电器的腐蚀与短路,再加上继电器、接触器控制系统切换频繁,起动时,冲击电流大,因此触头烧损、电刷冒火、电动机烧损故障时有发生,故障率高。
(5)系统抱闸是在运动状态下进行的,对制动器损害很大,闸皮磨损严重而引起的安全隐患。
随着计算机技术和电力电子器件的迅猛发展,电气传动和自动控制领域也日新月异。
其中,具有代表性的交流变频装置和可编程控制器获得了广泛的应用,为PLC控制的变频调速技术在桥式起重机拖动系统中的应用提供了有利条件。
2 系统硬件构成桥式起重机大车、小车、主钩,副钩电动机都需独立运行,大车为两台电动机同时拖动,所以整个系统有5台电动机,4台变频器传动,并由4台PLC分别加以控制。
(1)可编程控制器:完成系统逻辑控制部分。
控制电动机的正、反转、调速等控制信号进入PLC,PLC经处理后,向变频器发出起停、调速等信号,使电动机工作,是系统的核心。
第8章 电力拖动自动控制系统 运动控制系统(第5版)阮毅

反映了机械特性的线性段。
串级系统调速原理
降低调制度M ,按式(8-8)将提高逆变 器的输入电压 ,在动态中首先反映的是减 少电流 Id的,使电磁转矩减小,迫使电动 机转速降低,实现调速。与此同时,转差 率s增大,从而恢复 与负载电流平衡,使 串级调速系统恢复到新的稳态。
图8-1 绕线转子异步电动机转子附加电动势的原理图
有附加电动势时的转子相电流:
如图8-1所示,绕线转子异步电动机在外 接附加电动势时,转子回路的相电流表达 式
Ir
sEr0 Eadd Rr 2 (sX r0 )2
(8-3)
转子附加电动势的作用
1. Er 与 Eadd 同相
当 Eadd ,
M
3~
sPm
CU1
sEr0
T1 CU 2
图8-3 转子电路连接可馈出或馈入电功率的双PWM交-直-交变频器
8.2 绕线转子异步电机转子变频控制的四种基本 工况
本节摘要
电机在次同步转速下作电动运行 电机在超同步转速下作电动运行 电机在超同步转速下作发电运行 电机在次同步转速下作发电运行
Pm
(1 s)P m
(d )
T e
sPm
CU
(1 s)Pm
10
(a)
sPm
CU Te
图8-4 绕线型异步电动机在转子附加电动势时的工况及其功率流程 a)次同步速电动状态 c)超同步速发电状态 b)超同步速电动状态 d)次同步速发电状态 CU——功率变换单元
1. 电机在次同步转速下作电动运行
Ud0 Ui0 Id R 整流电压输出
电机拖动与变频调速-交流电动机的变频调速

任务内容
某生产机械工作台采用三相异步电动机拖动 ,为了生产工艺需要,需采用变频器面板控制 电动机的变频调速。试查阅变频器技术手册, 设计如何采用变频器面板操作实现电动机的运 行控制。
主要内容
步骤一 认识变频器 步骤二 变频器的安装接线 步骤三 变频器操作面板的基本操作 步骤四 变频器控制电动机运行操作
n
n
n
O
T
电动时
负载时
再生时
O
T
O
T
a)
b)
c)
变频调速机械特性
步骤一 (二)基频以上恒功率(恒电压)变频调速
恒功率变频调速又称弱磁通变频调速。相当于直流电动机弱磁 调速的情况
随着转速的提高,电压恒定,磁通就自然下降,当转子电流不 变时,其电磁转矩就会减小,而电磁功率却保持恒定不变。
变频调速控制特性
步骤一
(二)通用变频器的基本结构
通用变频器大多可以分为主电路单元、驱动控制单元、中央处理 器单元、保护和报警单元以及参数设定与监视单元五大部分。
序号 基本单元
功能描述
主电路单元主要包括整流器和逆变器两个主要单元,三相交流电由输
1
主电路 入端接入后,经过整流器整流成直流电压,然后由逆变器变成电压、 单元 频率可以调整的交流电,从输出端输出接到三相异步电动机的接线端
此键用于浏览辅助信息。变频器运行过程中,在显示任何参数时按下此键并保
持不动2秒钟,将显示以下参数值(在变频器运行中从任何一个参数开始):1.
功能 直流回路电压(用d表示)2.输出电流A3.输出频率(Hz)4.输出电压(用o表
示)5.由P0005选定的数值(如果P0005选择显示上述参数中的任何一个(3,
步骤二 (二)变频器的电气安装
变频调速与电动机拖动控制

3 paf
() 2
式 中 : =X 十X X 。 由式 ( ) 以看 出 , 忽 略 , 2可 当 . , 大 转 矩 时 最 和 a无 关 , 在低频 时 , 但 . 已不 可 忽 略 , M 将 随 厂 减 小而 减 小 。因此 , / 常 数 的 运 行 方式 适 用 于 调 速 范 围不 太 大 , 转 矩 随 转 速 的 降 厂 为 或 低 而 变 小 的 负载 , 风 机 、 类 等 负 载 。 如 泵
维普资讯
河
北
科
技
大
学
学
报
V O1 23 N O.3 . Sum 6 2 2 002
第 2 3卷 总第 6 2期
第 3期 20 0 2年
J OU RNAL OF HEBEIU NI VERS TY I OF
S ENCE AN D CI TECHN OLOGY
‰ 一矩 有 1
一
3 U} p 4 a 1[1 ({ } ) ]  ̄ , N r+ ,+日 x: ’ f .
() 4
当 M 一 M 时 , 得 可
u1 1=日 { 1 f ( / f / N f[ + 1 a +Q “ I E + ( +Q ] “ , ) / 1 1 ) )
通 常有两种控制方法 。
1 保 持 / ) F 一常 数 的 比例 控 制 方 式
在 降低 频 率 调 速 过 程 中 , 持 / 为 常 数 , 就 是 保 也 和 厂, 且 和 厂 均 以其 额 定值 表 示 , 即
保 持 磁 通 近 似 为 常 数 。设 电动 机 工 作 于任 意 的
动 态 响 应 快 以及 运 行 可 靠性 高 的特 点及 良好 的技 术 性 能 , 因此 , 变频 调 速 是 异 步 电 动机
电力拖动自动控制系统第7章 交流调压调速系统
7.1 交流调速系统概述
7.1.1 交流调速的发展概况
交流调速系统:由交流电动机拖动、电机转速为控制目标的电力拖动自动控制系统 直流电动机优点:调速性能好 直流电动机缺点:体积大、容量小、制造成本高、有机械换向装置,维护困难 交流电动机优点 :结构简单可靠,维护少,无机械换向火花,制造成本低 20世纪70年代,研究开发高性能的交流调速系统,期望用它来节约能源。 同期,电力电子技术、大规模集成电路、各种控制理论、计算机控制技术的 飞速发展,为交流调速电力拖动的发展创造了有利条件。 20世纪80年代,原有的交直流调速拖动系统的分工格局被逐渐打破。 20世纪90年代,交流调速系统已经占到了调速系统的主导地位。 目前的许多交流调速系统在装置容量上、动静态性能上、可四象限运 行的要求上,以至在系统制造成本上都可以与直流调速系统相媲美。
只要改变转速给定信号就可 以使静特性平行地上下移动, 达到调速的目的。
该系统与直流 V-M系统有许多 本质上的不同之处
Ks
不但与 α 角的大小有关,还与负载的功率因数角有关。
n f ( U 1 ,T ) 是一个复杂的非线性函数,且 R2 X2 、
也不是一个定值,随电机转速变化而大幅度变化
当电机转子的转速与 定子电流的频率有严格 比例关系的电动机称同 步电动机,无严格比例 关系的电动机称异步电 动机。
无刷直流电动机及 开关磁阻电动机都满足 “定子电流的频率与转 速有严格比例关系”的 条件,所以也把它归入 同步电动机。
7.1.3 异步电动机的机械特性
1.固有机械特性
转矩的物理表达式
xK r1 I 1 U 1 x1 x2
r2
2 r1 ( x1 x ) 2 2
运动控制系统-第6章 同步电动机变压变频调速系统

2
当负载转矩加大为 TL4时,转子减速使角θ 增加,电磁转矩 Te减4 小,导致θ继续,最 终,同步电动机转速偏离同步转速,这种 现象称为“失步”。
2
在 的范围 内,2 同步电动机不 能稳定运行,将产 生失步现象。
Te
Te3
Te4
0
3 4
2
图6-4 在 的范围内,
2
Te1
TL1
3U s Es
m xd
sin1
0
2
当负载转矩加大为 时,转子减速使角θ增加,
当 衡,
,电磁 转 2矩 2
和TL负2 载转矩
Te 2
又达到平
TL2
Te 2
TL2
3U s Es
m xd
s in 2
同步电动机仍以同步转速稳定运行。
0
2
若负载转矩又恢复
为 TL1,则角 恢 复
3. 梯形波永磁自控变频同步电动机即无刷直 流电动机——以梯形波永磁同步电动机为 核心的自控变频同步电动机,由于输入方 波电流,气隙磁场呈梯形波分布,性能更 接近于直流电动机,但没有电刷,故称无 刷直流电动机。
无刷直流电动机实质 上是一种特定类型的
iA eA eA
同步电动机,气隙磁 场和感应电动势是梯
第6章
同步电动机变压变频 调速系统
同步电动机直接投入电网运行时,存在 失步与起动两大问题,曾一直制约着同 步电动机的应用。同步电动机的转速恒 等于同步转速,所以同步电动机的调速 只能是变频调速。
变频调速的发展与成熟不仅实现了同步 电动机的调速问题,同时也解决了失步 与起动问题,使之不再是限制同步电动 机运行的障碍。
永磁同步电动机的转子用永磁材料制 成,无需直流励磁。
电力拖动系统

特点:特性变软,可无级(平滑)调速。
->乳源高级中学通用技术实验室</tyjs
改变电枢电压的调速
降压调速:理想空载转速减 小,电动机的转速也相应减小。 属于恒转矩调速。
方法:1.G-M系统(可通过改 变直流发电机的励磁),2.晶闸管 整流装置(改变导通角),从而改 变电动机的电压。(书P.93图)
一、直流电动机的调速方法
直流电动机的机械特性表达式为:
n U Ke
-
Ra R KeKT 2
T
n0 - kT
由机械特性,可知直流电动机的调速方法有三
种:—— 可分别单独调节和同时配合调节。
1.电枢回路串电阻调速;
2.弱磁调速;
3.降压调速
->乳源高级中学通用技术实验室</tyjs
负载机械特性:
负载与电动机机械特性都是拖动系统工作的依据, 应知道类型。
稳定运行:
稳定运行是系统追求的目的,应该掌握判断的依 据和方法。
->乳源高级中学通用技术实验室</tyjs
一、电力拖动系统的运动方程
单轴系统的运动方程:
书P.86.式(1-1)
T-TL=JdΩ/dt=(GD2/375) dn/dt —— 从牛顿定律演化而来。 其中:375=120g/π(g=9.81,重力加速度常数)
->乳源高级中学通用技术实验室</tyjs
变频调速原理
原理:变频调速属于改变同步转速。根据n0=60f1/p可 知,频率变,同步转速变,机械特性也变。 要求:1.f1>fn,负载转矩应相应减小,否则过载;
2.f1<fn时,应保持U1/f1=常数。 原因:∵f1>fn时n>nn,若保持额定转矩不变,会造 成电机过载,∴若f1>fn,负载转矩应相应减小。∵f1 <fn时,若保持U1不变,则E1=4.44kf1Φ中,Φ将增加, 磁路会出现饱和,损耗会增加。 ∴f1<fn时,必须保 持U1/f1=常数。而在f1>fn时,保持U1=Un,磁路磁通减 小,电磁转矩相应减小。
4章 交流异步电动机变频调速系统

为交流异步电动机转矩系数,其中Nr为转子绕组有效匝数;
φr为转子功率因数角。
可见,转矩控制的困难体现在以下几点: T T ① m 是由定子电流is iA , iB , iC 和转子电流 ir ia , ib , ic 共同产生的,它的
空间位置相对于定子和转子都是运动的。 ② m 与 I r 是两个相互耦合的变量,且 I 对于一般的鼠笼形异步电机是无法 r ③ r 是与转速相关的时变量(与转差s有关), 且当电机运行时转子电阻 Rr 随温度变化而变化, Te 也随之变化。除此以外,式中的 Te 只是平均转矩的概念, 对平均转矩的控制已十分困难了,更何况瞬时转矩。对转速的控制实质上就是 对转矩的控制,转矩控制的困难是实现交流电机高性能调速的主要障碍,也是 过去限制交流调速系统获得广泛应用的主要原因。 2)调速装置中器件发展的限制:调速装置中两大组成部件是主电路和控制电路。 主电路中的主要器件—电力电子功率器件在近五十年来更新换代了五代之多,以 适应变频调速(PWM脉宽调制)的需要。控制电路中的主要器件—微处理器在 近二十年中运算速度提高了数倍,以适应高性能变频调速复杂算法的需要。交流 调速系统的发展依赖于新型电力电子器件的应用、微电子技术的发展。
直流调速系统中各部分分别为5%,40%和55%,而交流调速系统中各部分分别 为10%,60%和30%。特别是当功率大于500 kW,交流调速系统的成本比直流 调速系统的成本明显降低。 4.1.2交流电动机的调速方法及其主要应用领域 1.交流电动机的调速方法 由电机学可知,交流电动机的同步转速表达式为 60 f s (4.6) ns np ns 为同步转速。 式(4.6)中,np为电机极对数;fs为电机定子供电频率; (1) 同步电动机的调速方法 可见,均匀地改变同步电动机的定子供电频率fs,就可以平滑地调节电动机
变频调速技术在电机拖动中的有效运用
摘 要 作 为现代 化社 会 中 的基础 能源 ,电 力资源在 国 民经 济和 社会 发展 中 占据 着十 分重要 的地 位 , 电 气化 的程度 是 衡量 一个 国家经 济 发展
水平 的重 要 标 志之一 。 电 力 系统安 全平 稳 运 行 是 国 家整 个 电力工程 的基础 和 灵魂 。 本文 主 要 是 探 讨 变频 调技 术 在 电力 系统 继 电保 护 、 电机拖 动 、海 上平 台 调 ,提 高对 变频 调技 术 的 理性 认知 ,从 而 发挥 变频 调技 术在 电机 拖动 中 的有效 应 用 。
分地 发挥 出其在 系统 中提 高 电网功率 因数 的 作 用 ,最 大 限度 地减 少 网络 的耗损 ,从 而提
高 电 网的质 量 。 在选 择 无 功补 偿 装 置 时 ,一 般是 选 用
分组 投切 的 电容 器和 电抗 器 ,特殊 情 况下可 以选用 调相 机或 者静 止无 功 补偿 装置 ,在 无 功 平衡 的 基础上 海应 当安 装 调压 装置 ,以 满 足 电压质 量标 准的要 求 。 电网的 无功 补偿 应 运用。 遵 循分 层分 区和 就地 平衡 的 原则 ,同时要 充 关键 词 分 考虑 到水 电站 的 无功调 节 能 力 ,并 应大 力 变频调 速 ; 继 电保护 ;海上平 台 推 广 电压优 化 、功率 因数 、地 区的 电网无 功 变 频 调 速 技 术 可 以 起 到 节 能 增 效 的 效 管理 系统软 件 等新 技术 的应 用 ,以更 好地 提 ] 。 果主要是因为做到了根据用水流量的变化情 高电 网的 质量和 运行 的安 全 可靠 经济 电 力 系 统 的 安 全 直 接 关 系 到 国 家 和 人 况 对水 泵进 行 了合理 的 选配 。为 了使 在恒 压 3 . 4 海上 平 台配 电 自动化 系统 设计 民生命 财 产的安 全 ,因此 ,电 力系统 的安 全 状 态 下 的变 频 调 速技 术 也 能 起 到 优 良的 效 在 潮 流 计 算 的 基 础 上 ,通 过 对 系 统 进 和 可靠 性 得到 了各级 政府 部 门及企 业 领导 的 果 ,宜 采用 多 泵并联 的 供水模 式 。在 这种 模 行暂态稳定计算 、电压稳定计算等各种稳定 充 分重 视 。随 着我 国社 会经 济的快 速 发展 , 式 中 ,只 要一 台泵 是变 频泵 ,其 余的 都选 用 计 算 ,能够 对接 入 系统方 案 中的 运行 参数 进 对 电力 系统各 方面 的技 术和 发 展提 出 了更高 工频 泵 ,就可 以实 现恒 压 变量 供水 。变频 泵 行有 效的 校验 ,从 而确 保各 参数 能够 满 足 系 要 求 。下 面本 文从 变频 调 速技 术和 电力 系统 的工 作效 率是 随流 量 变化 的 。当水 流量 小于 统安 全稳 定运 行 的要 求 。在 稳 定计算 中 ,使 的关 系进 行论 述 。 台 泵工 频恒 压条 件 下的流 量 的时候 ,仅 由 用 的 数 学 模 型 一 般 是 采 用 恒 定 暂 态 电势 模 型 ,现有 设备 的参 数按 照 实际参 数 ,对于 没 台变频 泵工 作供 水 ; 当流量加 大 的时 候 , 1变频调速技术概述 变频 泵 的转速 会随 着 上升 ;当用水 量流 量持 有完 整参 数时 ,可以按 照 同类设 备 的参数 进 变 频 调 速 技 术 是 根 据 电机 转 速 与工 作 续加 大 ,使变 频泵 的 工作 转速 达到 工频 转速 行计 算 ,根据 计算 的 结果 ,如 果接 入 系统方 电源输 入 频率 成正 比例 ,通过 改变 电动 机工 的时 候并 超过 的时 候 ,变 频泵 的控 制 系统会 案 中的运 行参 数不 能满 足稳 定 的要 求 ,就 须 。 作 电源频 率而 达到 改变 电机转 速的 目标 。变 自动 启动 一 台工频 泵 开始 工作 ,其 余 的工频 采取 一定 的措 施 ,提高 稳定 性[ 短 路 电流 计 算 主 要 是 对 由故 障 短 路 在 频 器技术 已经深入 应用 到 我们 生活 的每 个 角 泵也 同理 启动 。 落 ,变频 调速 系统 的控 制 方式 包括 矢量 控制 当水 流 量下 降 的 时候 ,变 频 泵 的转 速 电气元件 上造 成 的不 正常 电流 值进 行验 算 , 这一计算的结果是电气设备选型的主要依 ( VC) 、直接 转矩 控 制 ( D T C)等 。随 着 也下 降 , 当变 频泵 的 流量 下降 到零 的时 候 , 半导 体技 术 的发 展以 及数 字控 制的 普及 ,矢 会 自动 关 闭一 台工频 泵 ,改 由 自己供 水 。此 据 。在 电 力系统 设计 中 ,应 当按 照远景 水 平 0 量 控制 的应 用 已经从 高性 能范 围扩 展 到驱 动 外 ,具 有 自动 睡眠功 能 的变频 泵还 可 以在 用 年 来计 算短 路 电流 ,即是 系统 设 备在 投运 1 或 者是 专用 驱动 领域 ,直 到 人们 日常生 活 用 水 流 量 接 近 零 而 其 他 工频 泵都 停 工 的 情 况 年 后 的系统 发展 计算 三相 和单 相短 路 电流 , 的 变频 空调 、冰 箱 、洗衣 机等 等家 用 电器 。 下 ,进 入 睡眠模 式 , 自动 停泵 。从 而 达到 最 以 保证 电气 设备 选型 及继 电保 护 整定值 和熔 与 此 同时 ,交流 驱动 器 已经在 工业 机 器 、电 佳 的节 能效 果 。根据 不 同的海 洋平 台的应 用 体 额定 电流 的正 确性 ,从 而保 障 在 出现 故 障 梯 、 电动汽 车 、起 重设备 等领 域 也得 到 了广 情 况可 以进 行分 别研 究 。海 上平 台 由于 电机 时 ,继 电保 护能 够快 速地 切断 短 路 电流 ,减 泛 的应 用和 发展 … 。 负荷相 对 于平 台 电网容量 而 言 ,比较 大 ,启 少 由短 路造 成 的损 失 ,从 而提 高 海上 平 台配 动 电流 太大 ,对 电 网的 冲击 也大 ,所 以通 过 电 自动 化 系统设 计 反应水 平 ,但是 与 电机 的 变 频 启动没 有 关系 。 变 频 器来控 制 启动 电流 的 。 2 变频 调技 术在 电机 拖 动 中应用 3 . 2 海上 平 台 自励 磁 的 判 断和 控 制 措 电 机 拖 动 主 要 是 关 于 直 流 电 机 、 电 机 4 结语 系 统的 运动 方程 、直 流 电机拖 动 系统 的静 态 施 海 上 的 励 磁 电 源 是 靠 UP S 来 供 电的 , 随 着 我 国社 会 经 济 的 发 展 ,我 们 对 电 和 动态 特点 、变压 器 、交流 电等 各个 方面 的 工作 内容 。从 控制 类 别角度 分析 ,卸油 泵电 不 会 丧失 的 。作为 启动 电源 的 透平 发电机 需 力的 需求 越来 越迫 切 ,电 力在我 们 日常 生产 动 机 的变 频调 系统 是转 速开 环 ,恒 压频 度 比 要空 载较 长 的海缆 线路 ,由于 海缆 对地 电容 生活 中发 挥着 越来 越 重要 的作 用 。为 了适应 控 制 电源变 频 调速 系统 。在 使 用过程 中 ,用 较 大 ,这 等于 接 了一个 等效 的 电容 负载 ,就 时代 的发 展和 满足 人们 生活 的需 要 , 电力系 电 压控 制 的 环 节 实 现 对 输 出 直 流 电压 的 控 是 如 果没 有励 磁 的 电源 ,当 电容负 载和 发 电 统也 要不 断的 改革 和 完善 ,从而 为 人们提 供 制 、用频 率控 制环 节不 一样 的 节奏 。 机 的参数 满足 一定 的数 值 条件 的时 候 ,系统 更好 的服 务 。现阶 段 ,信 息技 术 已经被 普遍 在 整 个 电 力 系统 中控 制 信 号 来 源 于 速 会产 生一 些参 数 的谐振 ,它的 频率 大约 等于 应 用在社 会 生活 的各 个领 域 ,面对 新形 势 、 度给定,假定速度给定是在跳跃变化的情况 工频。例如:某油 田群 电力系统,主电源都 新 情 况 ,变 频 调 技 术 也 要 不 断 地 发 展 和 更 5 0 0 k w的没 有 刷 励 磁 同步 燃起 透 新 ,以便 更好 地保 障 电力 系统 的安 全和 正 常 下也能够协调控制逆变器的输出电压和电流 是 由三 台 6 频 率 的 有 规 律 变 化 。所 以 设 定 了给 定 积 分 平发 电机 组成 的 ,在 正常 生产 的时 候发 电机 运行 。 器,把跳跃的输入变成斜坡输出信号,从而 通 常的运 行 方式 是两 用一 备 ,外部 输进 原 油 有效 控制 电机 的正 转和 反转 。在整 个 电机拖 的时 候 三台 同时运 行 ,各 个平 台和 主 电源通 动 系统运 行过 程 中 ,速 度 给定 和给 定的 积分 过较 远 距离 的海 底 电缆连 接并 且安 装应 急 的 参考文献 … 1朱方明 ,海涛 ,贺主龙 .技 术创新推 动国家 器输 出分为 正负 电压。 因为控 制 电流 器的输 发 电机 。 J ] . 四 3 . 3 无功 补 偿 原 理 在 海 上平 台 电力 系 和 区域 经济跨越 式 发展 的作 用机制探 析[ 出电压和逆变器的输出频率都只需要正值的 川 大 学 学报 ( 哲 学 ��
交流异步电动机的调速
2021/4/9
晶闸管串级调速
37
的原理线路图
TY TYY
U U
IN 2p 2IN p
1
❖ 功率增加一倍,转速增加一倍,转矩保持不便;
❖ 属于恒转矩调速
❖ 适用于:恒转矩负载,如起重机、运输带等
20变极调速的机械特性:
2021/4/9
18
皮肌炎图片——皮肌炎的症状表现
❖ 皮肌炎是一种引起皮肤、肌肉、 心、肺、肾等多脏器严重损害的, 全身性疾病,而且不少患者同时 伴有恶性肿瘤。它的1症状表现如 下:
T1
T2
s smD
2021/4/9
36
(三)晶闸管串级调速的基本原理
晶闸管串级调速具有调速范围宽,效率高(转差功率可反馈电 网),便于向大容量发展等优点,是很有发展前途的绕线转子异步 电动机的调速方法。它的应用范围很广,适用于通风机负载,也可 用于恒转矩负载。其缺点是功率因数较差,现采用电容补偿等措施, 功率因数可有所提高。总之,晶闸管串级调速向大功率发展,是很 有前途的。
2021/4/9
12
第三节 改变定子极数调速
❖ 改变定子极对数的同时,必须相应改变转子的级数。 绕线式电机要满足这个要求很困难;
❖ 而笼形异步电动机转子的极对数能自动随定子磁场 的极对数的变化而变化,所以变极调速适用于笼形 异步电动机。
❖ 单绕组双速电动机:一套定子绕组,具备两种极对 数,根据接法不同,得到两个不同的同步转速;
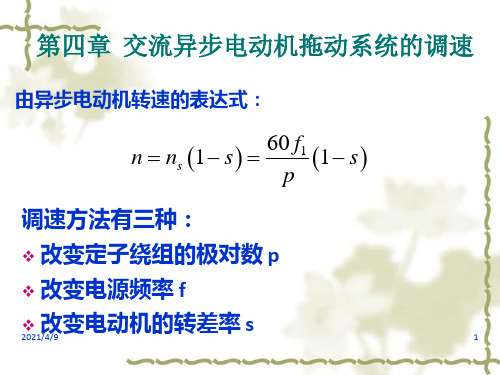
第四章 交流异步电动机拖动系统的调速
由异步电动机转速的表达式:
n
ns
1
s
60 f1 p
1
s
调速方法有三种:
❖ 改变定子绕组的极对数 p
❖ 改变电源频率 f
第1章电力拖动自动控制系统运动控制系统第5版
1.4 生产机械的负载转矩特性
生产机械的负载转矩是一个必然存 在的不可控扰动输入。
归纳出几种典型的生产机械负载转 矩特性,实际负载可能是多个典型 负载的组合,应根据实际负载的具 体情况加以分析。
恒转矩负载
负载转矩的大小 恒定,称作恒转 矩负载
a)位能性恒 转矩负载
b) 反抗性恒转 矩负载
TL 常数
1.3 运动控制系统转矩控制规律
运动控制系统的基本运动方程式
d
( J m
dt
)
Te
TL
Dm
Km
dm
dt
m
1.3 运动控制系统转矩控制规律
当J为常数时,运动控制系统的基本 运动方程式
J
d m
dt
Te
TL
Dm
K m
d m
dt
m
1.3 运动控制系统转矩控制规律
忽略阻尼转矩和扭转弹性转矩,运 动控制系统的简化运动方比。
1.2 运动控制系统的历史与发展
交流调速系统 交流电动机(尤其是笼型感应电
动机)结构简单 交流电动机动态数学模型具有非
线性多变量强耦合的性质,比直流电 动机复杂得多。
交流调速系统
基于稳态模型的交流调速系统 转速开环的变压变频调速 转速闭环的转差频率控制系统
内容提要
运动控制系统及其组成 运动控制系统的历史与发展 运动控制系统转矩控制规律 生产机械的负载转矩特性
现代运动控制技术
电机学、电力电子 技术、微电子技 术、计算机控制 技术、控制理论、 信号检测与处理 技术等多门学科 相互交叉的综合 性学科 。
图1-1运动控制及其相关学科
1.1 运动控制系统及其组成
图1-3 恒转矩负载
第6章 电力拖动自动控制系统 运动控制系统(第5版)

6.3 异步电动机变压变频调速
变压变频调速是改变异步电动机同步转速 的一种调速方法,同步转速随频率而变化
60 f1 601 n1 np 2n p
6.3.1 变压变频调速的基本原理
异步电动机的实际转速
n (1 s)n1 n1 sn1 n1 n
稳态速降
n sn1
6.2 异步电动机调压调速
保持电源频率为额定频率,只改变定
子电压的调速方法称作调压调速。 由于受电动机绝缘和磁路饱和的限制, 定子电压只能降低,不能升高,故又 称作降压调速。
异步电动机调压调速
调压调速的基本特征:电动机同步转速保 持额定值不变
60 f1N n1 n1N np
气隙磁通 Φ m
' 1 sR R s r
2
s Lls L
2 2 1
' lr
2
U s 可调
电磁转矩与定子电压的平方成正比
6.2.2 异步电动机调压调速 的机械特性
理想空载转速保持为同步转速不变
n0 n1N
临界转差率保持不变
sm Rr' R s2 12 ( Lls L'lr ) 2
三相异步电动机定子每相电动势的有效值
Eg 4.44 f1Ns kNS Φm
忽略定子绕组电阻和漏磁感抗压降
Us Eg 4.44 f1Ns kNS Φm
异步电动机的气隙磁通
气隙磁通
Φm Eg / f1 Us / f1
为了保持气隙磁通恒定,应使 或近似为
学习任务7:电梯的电力拖动系统

学习任务7电梯的电力拖动系统任务分析通过本任务的学习,了解电梯的机械特性,了解双速电梯、调压调速电梯和变频变压调速电梯的工作原理。
建议课时建议完成本任务为10学时。
学习目标应知1.电梯传动系统的动力学特性。
2.电梯运行速度给定曲线设计。
3. 双速电梯、调压调速电梯和变频变压调速电梯的工作原理应会1.了解电梯机械特性。
2.了解电梯永磁驱动方式学习任务7.1——交流双速拖动系统基础知识一、电力拖动方式电梯运行性能的好坏,很大程度上取决于电力拖动系统的优劣。
随着科学的发展,电梯电力拖动系统经历了从简单到复杂,从不完善到完善的过程。
目前我国曳引式电梯电力拖动系统有两大类型,一是交流拖动系统,即用交流电动机作动力的拖动系统;二是直流拖动系统,即用直流电动机作动力的拖动系统。
交流拖动系统,有单速、双速、调速之分。
直流拖动系统,有可控硅励磁和可控硅供电系统之分。
1.交流单速拖动方式只有一种运行速度,一般只用于服务电梯(杂物电梯),速度小于0.5米/秒。
2.交流双速拖动方式有两种运行速度,大量用于货梯,,速度为0.25米/秒~1.0米/秒。
3.交流调速拖动方式电动机的转速可调的拖动系统,一般用于客梯。
交流调速拖动系统又可分为调压调速(ACVV)和变压变频调速(VVVF)系统。
ACVV系统是通过对交流电动机的定子进行调压调速,减速时配合涡流制动、能耗制动、反接制动等进行减速控制,以获得好的舒适感和平层准确度,多用于2米/秒以下速度的电梯。
VVVF系统是采用变压变频技术,对电动机的供电频率和电压进行控制,可以达到直流电动机驱动电梯的水平,具有体积少,重量轻,效率高,节能省电等优点。
4.直流可控硅励方式是一种发电机--电动机调速系统(简称:G-M调速系统)我国生产的直流电梯多是G-M调速电梯。
调整发电机的励磁电流,就可改变发电机的输出电压,实现了电动机的调压调速。
由于G-M调速系统能耗大,维修困难。
我国早已不生产此类电梯。
电机拖动中变频调速系统的常见故障及排除措施
变频调速技术提供 了有利的依据 。
【 关键词】 电机拖动 ; 变频调速 系统; 常见故 障; 排除措施
电机是一 种实现 电能量转换 的电磁装置 ,包括 电动机和发 电机 检查 电机 、 变频器和 电机之间 的接线 : 检查变频器 三相输出 电压是否 电机拖动是 指由原动机带动生产机械运动 . 以电动机作为原动机并 且 平衡 。 按照人们通常给定的规律带 动生产机械 的运转 . 就称 为电机拖动 电 3 . 7过 热 故 障
2 0 1 4 年O 5 期
科技 嚣向导
◇ 科技论坛◇
电机拖动中变频调速系统的常见故障及排除措施
王 磊
( 唐 山市特种设备监督检 验所
【 摘
河北
唐山
0 6 3 0 0 0 )
要】 根 据实践经验 并结合理论知识对 电机拖动 中变频调速 系统的常见故 障及排除措施进行 了探讨 , 为 日常工作中操作人 员熟练掌握
4 . 日常维护检查应注意事项
变频器上 电之前应先检测周 围环境 的温度及湿度 . 温度过高会导
致变频器过热报警 . 严重时会 直接 导致电路短路 、 变频器功率器 件损 3 . 常见故障及排 除措施 坏 : 空气湿度过大会导致变频器 内部直接短路 在变频 器运行时要注 3 . 1 过 电流 、 过载 风道 排风是否流 畅 . 风机是否有异 常噪 般是 由于变频器的输 出电流超过过电流检测值 ( 约为额定 电流 意其冷却系统工作 是否正常 : P 2 0以上的变频器可直接敞开安装 . I P 2 0以下 的变频器一般应采 的2 0 0 %) 、 变频器 的输 出电流超过 电机或变频器 的额定 负载能力 ( 约 音 。I 变频柜散 热效果好坏将直接影 响变频器 的正常运行 保 为额定值 的 1 6 0 %) 。应检查输入三相电源是否 出现缺相或不平衡 、 电 用柜式安装 . 保护柜应通 风、 防尘 、 防 机接线端子 ( u 、 v 、 w) 电路之 间有 无相 间短 路或对 地短路 ; 检 查 电机 护柜尽可能安装在周 围温度不易上升 的地方 : 频器在柜内应该纵 向安装 . 而且上下 、 左 右方 向应 留有足 和编码器电缆及相序是 否正确 : 检查 电机功率是否 匹配 、 在 电机 电缆 雨性能 良好 :
变频调速系统毕业设计1
河南理工大学毕业设计(论文)说明书摘要变频调速是交流调速的发展方向。
传统的交流调速方式主要有定子调压调速、转子串电阻调速、变极调速和串极调速等,虽然这些调速方式在某些指标方面具有优异的性能,但是它们在不同的应用场合中存在着诸多问题,如调速精度不高、有级调速、谐波污染较大、功率因数低等,因此通用性差。
与传统的调速技术相比,变频调速具有极大的优越性,整个调速系统体积小、控制精度高、保护功能完善、工作安全可靠、操作工程简便、通用性强、使传动系统具有优良的性能,最重要的优点是节能效果十分可观。
本课题采用韩国SOHO变频器构建一个变频调速实验系统,主要解决交流调速实验系统的“负载模拟”、系统再生电能的回馈利用和高效节能等关键技术。
系统采用双电机联轴拖动设计,可方便获得电动机在反应或位能负载下四象限运行的连续变化控制过程,重点凸出变频调速控制精度高、安全可靠、节能效果可观的优点。
该实验平台可以将变频调速技术在教学、科研和应用中的一些理论现象和动态过程的分析结论给予全面的实验验证,既适合电气控制专业的学生做电机实验和相关自动化实验研究,也适合实际工作者进行电机性能实验和检测之用。
关键词:变频调速;SOHO变频器;实验系统;节能2.2kW squirrel cage motorVariable frequencyspeed-governing experiment system designAbstractFrequency control of motor speed is the development direction of AC variable speed. The traditional AC speed regulation includes stator variable voltage speed control, rotor series resistance speed, pole changing control and cascade control , etc..Although these speed control methods have excellent performances in some indicators, but there are many problems in different applications.Such as low accuracy, step speed regulating,large, harmonic pollution, low power factor. So the versatility is pared with traditional speed control technology, frequency control has great advantages, small, light weight, high control precision, the perfect protection, safe and reliable operation, versatile. so the transmission system has excellent performance, the most particular advantage is impressive energy saving.This topic build a VVVF experimental system with Korea SOHO inverter, mainly to solve load simulation of the AC speed regulating system,the key technology of the feedback of the renewable electricity and efficient energy saving.The system uses a dual-motor coupling drag design, easily access to the continuous change proces of the motor response or the four-quadrant operation of the potential load, focusing protruding Frequency Control advantages of high precision, safety, reliablity, and considerable energy saving effect. The experimental platform can be the conclusions of the frequency conversion technology in teaching, research and application of the theory of the phenomenon and the dynamic process to give a compreh ensive experimental validation.It’s not only for the electrical control professional students to do experimental study of the electrical experiments and automation, but also for the experimental and testing purposes of actual workers in motor performance . Key words: frequency control of motor speed; SOHO inverter; experimental system; energy saving河南理工大学毕业设计(论文)说明书目录1绪论 (1)1.1研究现状 (1)1.2变频调速的实际应用 (1)1.3变频调速的发展趋势 (2)1.4课题的研究意义 (2)2变频调速基础 (4)2.1变频调速基本原理 (4)2.2变频器控制方式 (4)2.3变频器的工作原理 (6)3硬件设计 (11)3.1设备选型 (11)3.1.1电动机的选定 (11)3.1.2变频器的选定 (11)3.1.3外围器件的选定 (13)3.2主电路设计 (15)3.3系统功能分析 (18)3.3.1负载模拟 (18)3.3.2电能回馈 (22)3.3.3系统功能实验 (23)4系统保护 (24)4.1过流保护 (24)4.2过载保护 (25)4.3电压保护 (25)5软件设计 (27)5.1参数分析 (27)5.2SOHO变频器具体参数设定 .................................................... 错误!未定义书签。
毕业设计(论文)-基于S7-200PLC的变频调速电梯控制系统设计
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊安徽工业大学毕业设计(论文)任务书课题名称基于S7-200PLC的变频调速电梯控制系统设计学院电气与信息工程学院专业班级自动化101班姓名学号毕业设计(论文)的主要内容及要求:根据电梯的设计要求和性能指标,确定PLC的控制任务,完成PLC的硬件设计、I/O地址分配、变频器的参数设置,绘制出PLC、曳引系统、显示系统、旋转编码器、门机电机等模块之间的硬件连接、系统框图。
在此基础上,分模块画出程序流程图,设计PLC的梯形图。
要求具备以下能力:(1)熟练使用STEP7编程软件(2)查阅相关文献了解电梯变频控制系统的组成及原理(3)基于 S7-200 PLC 和 FR-A540 通用变频器的实现六层电梯的控制,并运用与之相配的STEP7编程软件,通过STL和LAD两种编程语言编制控制程序。
指导教师签字:┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊摘要电梯是高层建筑不可缺少的垂直方向的交通运输工具。
由于传统的电梯运行逻辑控制系统采用的是继电器逻辑控制线路。
采用这种控制线路,存在易出故障、维护不便、运行寿命较短、占用空间大等缺点。
从技术发展来看,这种系统将逐渐被淘汰。
随着电梯拖动技术、控制技术的快速发展,电梯已从直流电动机拖动到交流单速、交流双速电动机驱动,到交流调压调速控制,发展到交流调压调频技术控制,其逻辑控制也由PLC代替原来的继电器控制,使得电梯运行的可靠性、安全性、舒适感、平层精度、运行速度、节能降耗、降低噪音等方面得到了极大的发展。
新制造的电梯都采用了对电动机实现线性调速的调压调频技术,由于vwF电梯采用微机控制,有完善的自检测、自诊断、自保护功能,因而十分安全可靠。
在研究电梯基本结构的基础上,阐述了电梯的拖动原理和控制原理,重点分析了电梯改造中如何用变频器和PLc来完善电梯控制系统,研究并提出了基于PLc和变频器的电梯控制系统的实现方案,利用FR-A540型变频器可编制速度曲线的特点为电梯舒适度的提高,提供了技术支持。
《电力拖动自动控制系统》复习要点

阮毅、陈伯时《电力拖动自动控制系统(第4版)》复习要点第一章绪论1、运动控制系统的组成2、运动控制系统的基本运动方程式me L d JT T dt ω=-mm d dtθω=3、转矩控制是运动控制的根本问题。
4、负载转矩的大小恒定,称作恒转矩负载。
a )位能性恒转矩负载b)反抗性恒转矩负载。
5、负载转矩与转速成反比,而功率为常数,称作恒功率负载。
6、负载转矩与转速的平方成正比,称作风机、泵类负载。
直流调速系统第二章转速反馈控制的直流调速系统1、直流电动机的稳态转速:e U IR n K -=Φ2、调节直流电动机转速的方法:(1)调节电枢供电电压;(2)减弱励磁磁通;(3)改变电枢回路电阻。
3、V-M系统原理图4、触发装置GT 的作用就是把控制电压U c 转换成触发脉冲的触发延迟角α。
改变触发延迟角α可得到不同的U d0,相应的机械特性为一族平行的直线。
5、脉宽调制变换器的作用:用脉冲宽度调制的方法,把恒定的直流电源电压调制成频率一定、宽度可变的脉冲电压序列,从而可以改变平均输出电压的大小,以调节电动机转速。
6、调速范围:生产机械要求电动机提供的最高转速n max 和最低转速n min 之比。
7、静差率:当系统在某一转速下运行时,负载由理想空载增加到额定值所对应的转速降落Δn N 与理想空载转速n 0之比。
8、调速范围、静差率和额定速降之间的关系:(1)N N n s D n s =∆-N N ND n s n D n ∆=+∆(1)N N n s n D s ∆=-9、转速负反馈闭环直流调速系统稳态结构框图10、直流电动机的动态结构11、开环系统机械特性和比例控制闭环系统静特性的关系:(1)闭环系统静特性可以比开环系统机械特性硬得多;(2)闭环系统的静差率要比开环系统小得多;(3)如果所要求的静差率一定,则闭环系统可以大大提高调速范围。
12、当负载转矩增大,闭环调速系统转速自动调节的过程:TL ↑→I d ↑→n ↓→U n ↓→∆U n ↑→U c ↑→U d0↑→n ↑13、比例调节器的输出只取决于输入偏差量的现状,而积分调节器的输出则包含了输入偏差量的全部历史。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4)
由上式可推导出异步电动机的转速n的表达式为
(55)
用(第2版)》第7章
7.1.2 三相异步电动机的机械特性
机械特性是指电动机在运行时,其转速与电磁转矩之间的关 系,即
n=f (T )。
三相异步电动机的机械特性曲线如图7-1所示。
图7-1 三相异步电动机的机械特性曲线
用(第2版)》第7章
(7-6)
式中 。
kN1——与绕组结构有关有常数;
N1——每相定子绕组的匝数
用(第2版)》第7章
(2)变频调速的要求 由式(7-6),若
为常数,则
(7-7) 忽略定子绕组的阻抗压降 可得
若f1减小,则
增加。造成电机铁心出现深度饱和,使
电机无法正常工作。为达到下调频率时
不变,必须有
因此,在额定频率以下,即
第章变频调速拖动系统
用(第2版)》第7章
2.异步电动机的工作原理
图5-1所示为异步电动机的工作原理。定子通入交流电电流 后形成旋转磁场切割转子绕组,由右手定则可判断转子绕组中 的感生电流方向。载流的转子绕组在磁场中受到电磁力的作用
就形成电磁转矩T,根据左手定则可判断T的方向。在T的作用
下转子就跟随定子的旋转磁场旋转起来。
7.2.1 异步电动机的调速 1.调速与速度改变 1)调速 是在负载没有改变的情况下,根据生产 过程需要人为地强制性地改变拖动系统的转速。 2)速度改变 速度改变是由于负载的变化而引起 拖动系统的转速改变。
用(第2版)》第7章
2. 调速指标
1)调速范围 指电动机在额定负载时所能达到的最高转速 nLmax与最低转速nLmin之比,即
调频时,同时下调加在
定子绕组上的电压,即恒 控制。
用(第2版)》第7章
7.3 对不同负载类型变频器的选择
在电力拖动系统中,存在着两个主 要转矩,一个是生产机械的负载转矩TL ,一个是电动机的电磁转矩T。这两个转 矩与转速之间的关系分别叫做负载的机 械特性n=f (TL)和电动机的机械特性n=f (T)。由于电动机和生产机械是紧密相连 的,它们的机械特性必须适当配合,才 能得到良好的工作状态。
变转差率调速一般适用于绕线型异步 电动机或转差电动机。具体的实现方法 很多,比如:转子串电阻的串级调速、 调压调速、电磁转差离合器调速等。 但 是随着s的增大,电机的机械特性变软, 效率变低。
用(第2版)》第7章
1.3.变频率调速
(1)异步电动机的等效电路
图5-2 异步电动机定子转子等效电路
每转反在相子电图绕电动5组路势-2的中,中电产它,阻生是U1的;定为电子x定1为动绕子定势组的子切、相每割电电相流旋压绕、转;组漏磁I1的为电场漏定抗而抗子产;;的E生1E相为的2s电每,、流相其I2s;、定有r子x效12为s绕值分定组计别子的算为 如下:
用(第2版)》第7章
7.1.4 三相异步电动机的制动
电动机的制动状态是指电磁转矩T与转速n方向相反的状态 。
1.直流制动 电动机制动时,切断电动机的三相电源,在定子绕组中通入
直流电,产生一恒定磁场,如图7-3所示。
a) 直流制动的原理
b)直流制动的机械特性曲线
图7-3 直流制动的原理与机械特性
用(第2版)》第7章
用(第2版)》第7章
7.1.3 三相异步电动机的起动
起动时定子电流Ist也很大,一般会达到额定电流IN 的4~7倍,除了小容量的三相异步电动机能直接起动 外,一般要采取不同的方法起动,变频器用降低频率f1 从而也降低了U1的方法来起动电动机。如图7-2所示为 低频起动时电动机的机械特性曲线。
图7-2 低频起动时电动机的机械特性曲线
2.回馈制动 由于某些原因,当n>n1时,转子切割旋转 磁场的方向和电动运行状态n<n1正好相反,转 子中感应电动势和电流的方向也相反,电磁转矩 T也就和n反向,为制动转矩。回馈制动是将轴上 的机械能转换成电能,回馈给电源。
图7-4 回馈制动的机械特性曲线
用(第2版)》第7章
7.2 异步电动机的调速方式
原理
图7-1 异步电动机的工作
用(第2版)》第7章
3.异步电动机的转速及转差率
只有旋转磁场和转子绕组之间存在相对运动,转子绕组才能切
割磁力线,进而产生感应电流和形成电磁转矩。因此转子转速n 与旋转磁场转速n0之间一定存在着一个差值,我们称之为转差, 用Δn表示,即
(5-3)
异步电动机的实际转速为n,n总是小于n0,异步电动机的“异步”正是 来源于此。转差n0–n与同步转速n0的比值称为转差率,用s表示
(74)
2) 调速的平滑性 是指相邻两级转速的接近程度。
3)调速特性 ① 静态特性 主要是指调速后机械特性的硬度。工程
上常用静差度δ来表示
(75)
② 动态特性 指过渡过程中的性能。
用(第2版)》第7章
7.2.2 异步电动机的调速方式 1.变极调速
三相异步电动机的变极调速属于有级调 速,通过改变磁极对数p得到 。 2.变转差率调速
用(第2版)》第7章
7.3.1 恒转矩负载变频器的选择
1.恒转矩负载特性
恒转矩负载是指那些负载转矩的大小,仅仅取决于负载的轻重,而和转速大小 无关的负载。带式输送机和起重机械都是恒转矩负载的典型例子。
a)
b)
图7-8 恒转矩负载的机械特性和功率特性
a) 机械特性 b) 功率特性
用(第2版)》第7章
1.起动转矩Tst 在n = 0 (s=1),T = Tst点,这点的转矩称为起 动转矩Tst,也称为堵转转矩。当电动机的负 载转矩大于Tst时,电动机将不能起动。 2.额定转矩TN 额 s内在N定 变通n 转 化=常n矩 时在N,T0(s.N0转。=2~矩s当N0即)电,.0可动6T之在机=间很工TN,大作点转的在,速范额这在围定点很内转的小变矩转的化T矩N范,时称围即,为 工 特作 性于 。额定转矩TN时,电动机具有很硬的机械
用(第2版)》第7章
3.最大转矩TM 的转在矩n称= 为n L最(大s=转s矩L),TMT。=TTM的M点大,小这象点征 着电动机的过载能力,用过载倍数λ表示 ,负λ载=转T矩M/都T不N。能在大任于何TM情,况否下则,电电动动机机转的 速将急剧下降,致使电动机堵转停止, 因此,这一点称为临界转速点。临界转 速nL的大小决定了L点的上下位置,从而 反映了机械特性的硬度。