面向多机器人协同控制的智能调度系统的设计 与实现
基于多智能体系统的机器人协作控制

基于多智能体系统的机器人协作控制一、引言随着机器人技术的不断发展和普及,机器人之间的协作越来越重要。
在实现机器人协作中,多智能体系统体现出了其优势。
机器人协作控制系统的性能和实用性受到了越来越多的关注。
本文将介绍基于多智能体系统的机器人协作控制。
二、机器人协作控制技术综述机器人协作控制是指多个独立的机器人同步工作,协完成一项任务的能力。
机器人协作系统主要包括协作机器人,协作管理器,通信网络以及图形界面等。
在机器人协作系统中,多智能体系统是一种重要的协作方式。
多智能体系统是指由多个独立的智能体组成的系统,每个智能体都能单独运行和决策,同时也可以相互合作协商。
三、多智能体机器人协作控制的设计在实现机器人协作控制时,需要将多智能体系统与机器人控制系统相结合。
具体来说,可以采取以下方案:1. 协作机器人协作机器人是指能够相互配合完成特定任务的机器人,例如搬运箱子等。
协作机器人可以通过视觉和激光雷达等传感器感知环境,协作管理器则负责协调机器人的任务分配。
2. 协作管理器协作管理器是机器人协作系统中的一个重要组成部分,其主要作用是协调机器人的任务分配和协作策略。
协作管理器可以通过多智能体系统来实现机器人的协同控制,减少机器人之间的冲突和重复操作。
3. 通信网络通信网络是多智能体系统协作的关键组成部分,其主要作用是传递机器人之间的信息和控制命令。
通信网络可以基于无线电信号或者有线传输实现,也可以采用云平台进行信息传输。
4. 图形界面图形界面是协作管理器的重要界面,通过图形界面可以直观地了解机器人状态和任务进度,方便用户进行任务调度和监控。
四、案例分析以物流机器人搬运为例,介绍多智能体机器人协作控制的应用。
该系统由两个二轮平衡车型物流机器人、激光雷达、视觉传感器、传感器集成平台和协作管理系统组成。
其中协作管理系统基于多智能体系统实现,协作机器人采用PID调节器控制系统进行控制。
协作机器人具有高度自主性和智能化,可以避免剧烈碰撞和防止重复运动。
基于多智能体技术的智能调度系统设计
基于多智能体技术的智能调度系统设计近年来,随着科技的不断发展,人类社会的生产力呈现出爆发式增长,越来越多的企业和组织也开始关注智能化的转型。
在这个过程中,智能调度系统作为一个重要的智能化应用技术,越来越受到各方的关注。
而基于多智能体技术的智能调度系统,则是目前研究和应用最广泛,最有效的一种方案。
多智能体技术是一种模拟人类社会行为的复杂系统,并且它结合了物理世界和数字世界的实时模型。
智能调度系统作为其中一个重要的应用领域,也可以通过引入多智能体技术实现优化调度,并且在实践中取得良好的效果。
在传统的调度系统中,往往是由一台主机进行计算和决策的,这样会产生许多局限性,如单一的决策逻辑、容易出现瓶颈等等。
而基于多智能体技术的智能调度系统则不同。
它是由多个智能体协同工作,彼此之间可以协调共同完成任务,更具有灵活性和效率。
在这种系统中,每个智能体都有独立的思维和决策能力,可以灵活地根据当前的情况做出最优的决策。
在实践中,基于多智能体技术的智能调度系统通常会采用分布式的系统架构,每个智能体分别负责一部分具体任务的调度,彼此之间进行信息交流和协同。
例如,在生产线上使用智能调度系统可以实现自动化调度,大大提高生产的效率和质量。
在物流分配中,也可以通过智能调度系统实现最优路线和物流配送方案的制定,降低成本和提高效率。
在商业营销中,智能调度系统可以有效地进行客户分析和资源配发,提高市场营销的效果。
不仅如此,在计算机网络、智慧城市、环境监测等领域,智能调度系统都有着广泛的应用。
当然,基于多智能体技术的智能调度系统也面临着一些挑战。
首先,多智能体系统的实时性要求很高,因此需要解决大量的网络延迟和通信问题。
其次,多智能体系统的行为和决策很难被解释和理解,这也给系统的调试和维护带来了困难。
因此,在系统的设计和实现上,必须考虑这些问题,并采用合适的技术手段来解决。
总之,基于多智能体技术的智能调度系统是一个十分有前途的应用领域。
多智能体协同控制系统的设计与实现
多智能体协同控制系统的设计与实现摘要:多智能体系统是由多个智能体相互协同工作实现任务的系统,其在许多领域具有广泛的应用。
本文将介绍多智能体协同控制系统的设计与实现方法,并从问题建模、协同策略和系统实现等方面进行详细阐述。
1. 引言多智能体系统是指由多个智能体组成的系统,每个智能体具有一定的自治能力,通过相互协作和协同工作实现任务的完成。
多智能体系统在机器人、无人车、自动化生产线等领域有着广泛的应用,可以提高系统的效率和鲁棒性。
2. 问题建模在设计多智能体系统之前,首先需要对问题进行建模。
问题建模可以采用图论中的图模型,用节点表示智能体,用边表示智能体之间的通信和相互作用关系。
智能体的状态、目标和约束可以形成系统的状态空间和目标约束空间。
通过对问题建模,可以清晰地描述智能体之间的关系和任务目标,为后续的协同控制提供理论基础。
3. 协同策略协同策略是多智能体系统中智能体之间相互协作和通信的方式。
常用的协同策略包括集中式控制、分布式控制和分散式控制。
集中式控制是指所有的智能体都由一个中央控制器进行调度;分布式控制是指每个智能体只控制自己的一部分任务,并通过通信协议和其他智能体共享信息;分散式控制是指每个智能体都具有一定的决策能力,并根据自身的感知信息独立地做出决策。
4. 系统实现系统实现是将协同策略应用于多智能体系统中的具体操作。
首先需要确定适合系统的控制算法,如PID控制、模型预测控制等。
然后,根据协同策略,设计合适的通信协议和消息传递机制,使得智能体之间可以相互通信和交换信息。
在系统实现过程中,还需要考虑智能体之间的协同冲突和冲突解决机制,以确保系统的稳定性和一致性。
5. 实例分析以机器人协同控制为例,介绍多智能体协同控制系统的实现。
假设有两个机器人分别负责搬运和组装的任务,通过分布式控制实现协同工作。
首先,通过问题建模,将机器人和任务分别表示为节点和边,形成图模型。
然后,设计分布式控制算法,使得机器人可以通过通信协议和信息交换实现协同工作。
基于人工智能的智能化电网调度控制系统设计与实现
基于人工智能的智能化电网调度控制系统设计与实现随着科技的进步和发展,人工智能(Artificial Intelligence, AI)在各行各业中发挥着越来越重要的作用。
其中,智能化电网调度控制系统设计与实现是一个备受关注的课题。
本文将对基于人工智能的智能化电网调度控制系统的设计和实现进行探讨。
一、智能化电网调度控制系统的重要性随着电力系统规模的扩大和复杂程度的增加,传统的电网调度控制方法逐渐无法满足需求。
智能化电网调度控制系统的设计和实现,可以通过人工智能技术提高电网的可靠性、稳定性和安全性,进一步提高电网的运行效率和经济性。
二、基于人工智能的智能化电网调度控制系统的设计原理1. 数据采集与处理智能化电网调度控制系统通过传感器等设备采集电力系统的各种数据,包括供电负荷、电压、电流等。
通过人工智能算法对采集到的数据进行处理和分析,形成对电力系统状态的准确描述和预测。
2. 智能化调度决策基于人工智能的智能化电网调度控制系统利用优化算法对电力系统进行调度决策,并实时对电力系统进行优化控制。
通过对电力系统历史数据和实时数据的学习,系统可以不断提升调度控制能力,适应复杂多变的运行环境。
3. 智能化设备协同智能化电网调度控制系统可以通过与各类电力设备的通信协议,实现与电力设备的协同控制。
通过与变压器、开关设备、智能电表等设备的联动,实现电力系统的智能化运行和优化控制。
三、智能化电网调度控制系统的关键技术1. 数据挖掘和建模技术通过对大量历史数据的挖掘和建模,可以帮助智能化电网调度控制系统准确预测电力系统未来的负荷和运行状态,为调度决策提供准确的依据。
2. 优化算法通过使用优化算法,智能化电网调度控制系统可以对电力系统进行最优调度,实现最佳的供电效果和经济效益。
优化算法可以有遗传算法、模拟退火算法等。
3. 通信与协议技术智能化电网调度控制系统需要与各种电力设备进行通信和数据交换。
通信与协议技术的应用可以实现系统与设备之间的信息交互和协同控制,实现电力系统的智能化运行。
多机器人协同自主控制系统设计与实现

多机器人协同自主控制系统设计与实现随着机器人技术的不断发展,多机器人系统在各个领域的应用越来越广泛。
多机器人协同自主控制系统是指通过多个机器人之间的协作与协调,实现对复杂任务的高效完成。
本文将对多机器人协同自主控制系统的设计与实现进行探讨。
首先,多机器人协同自主控制系统的设计需要考虑以下几个方面:任务分配与协作、路径规划与避障、通信与数据传输。
任务分配与协作是多机器人协同自主控制系统的核心问题之一。
在任务分配上,需要根据各个机器人的能力和任务要求,合理分配任务,使得每个机器人能够发挥自己的优势,同时保证任务的高效完成。
在任务协作上,需要机器人之间能够相互协同合作,共同解决问题。
例如,在一种搜索救援任务中,有些机器人负责搜索目标,有些机器人负责救援行动,它们之间需要通过通信与协调,实现任务的高效协同。
路径规划与避障是多机器人协同自主控制系统中的另一个重要问题。
路径规划是指为每个机器人规划一条合理的路径,使得它们能够快速有效地到达目标位置。
在路径规划中,需要考虑到机器人的动态特性、环境的动态变化以及其他机器人的运动情况。
避障是指在路径规划过程中,避免机器人与障碍物发生碰撞。
为了实现高效的避障,可以使用传感器技术,如激光雷达、红外传感器等,实时感知环境,避免与障碍物的碰撞。
通信与数据传输是多机器人协同自主控制系统中的基础保障。
机器人之间需要进行实时的信息交流与数据传输,以实现任务分配、路径规划、避障等功能。
为了实现可靠的通信与数据传输,可以采用无线通信技术,如Wi-Fi、蓝牙、RFID等,通过无线网络传输数据,并通过协议确保数据的安全和可靠性。
在多机器人协同自主控制系统的实现过程中,可以使用一些常见的软件和硬件平台,如ROS(机器人操作系统)、Gazebo仿真环境、Arduino开发板等。
ROS是一个开源的机器人操作系统,提供了一些常用的机器人功能包,如导航、感知、规划等,可以方便地实现多机器人协同自主控制系统的开发。
多智能体协同控制技术的研究与实现

多智能体协同控制技术的研究与实现在现代工业和社会生活中,大量的系统都是由多个智能体组成的复杂系统,这些智能体之间需要协同工作才能完成任务。
然而,由于每个智能体拥有不同的知识、技能和能力,协同工作常常面临着困难。
为了解决这个问题,多智能体协同控制技术应运而生。
本文将重点介绍多智能体协同控制技术的研究和实现。
一、多智能体协同控制技术概述多智能体协同控制是指多个智能体在一定的环境中通过相互协作,完成特定任务的过程。
多智能体协同控制技术的研究是人工智能、机器人学、控制理论和分布式计算等领域交叉的一个前沿课题。
其概念来源于群体智能与协同控制理论,并应用了多学科的知识。
多智能体协同控制技术的主要目的是设计使多个独立智能体之间协作的策略,从而实现高效的任务完成。
多智能体协同控制技术包括环境建模、通信协议的设计、决策协同、行为协同、控制结构、控制算法等方面。
在多智能体协同控制中,每个智能体负责完成其中一部分任务,而其他智能体则协助完成其他任务,从而实现整体目标。
多智能体系统中的智能体之间的协作可以采用不同的协同策略,如分工协同、互助协同等。
二、多智能体协同控制技术的研究方法针对多智能体协同控制技术的研究方法主要包括仿真实验、理论分析和实际验证等方法。
1. 仿真实验仿真实验是多智能体协同控制技术研究的一种基础方法,其主要优点是可以通过在计算机模拟环境中快速地构建不同的协同策略进行测试。
同时,仿真实验也可以通过量化分析智能体之间的通信和协作关系,针对多智能体协同控制技术的不同设计方案进行性能评估与比较,从而得出优化设计方案的结论。
例如,多智能体协同控制技术也可以应用于机器人控制中,通过对机器人协作的模拟实验,研究机器人团队内部行为和外部环境之间的关系,找到最佳的控制策略和协同方法。
此外,仿真实验也可以使用虚拟现实技术进行模拟,使测试更加接近实际应用场景。
2. 理论分析在多智能体协同控制技术中,理论分析是非常重要的研究方法。
多智能体协同控制系统设计与实现

多智能体协同控制系统设计与实现在现代科技和工业中,多智能体协同控制系统(Multi-Agent Coordination Control System, MACCS)正被越来越广泛地应用。
MACCS由多个智能代理组成,他们协同工作以完成一个目标。
在这样一个系统中,智能代理需要根据不同的任务需求,在不同的环境中迅速、有效地作出反应,以完成系统所要求的目标。
在MACCS中,系统一般包括控制器、传感器、行动器以及智能代理。
MACCS的一个重要应用是机器人技术。
在工业制造、游戏设计、智能交通系统和医疗行业等众多领域,机器人系统和智能代理都是非常重要的组成部分。
在这些领域中,MACCS可以帮助机器人实现更高效、更精准、更安全、更便捷的自主控制。
因此,各国在研究和开发MACCS技术方面都非常重视,并进行大量的实验研究和案例分析。
MACCS的实现需要遵循一定的设计原则,包括可扩展性、透明性、稳定性、可重复性和易实现性等。
此外,MACCS的设计还需要考虑智能代理之间的协同工作和信息共享,以便更好地完成有别于单一智能代理的任务。
MACCS的设计与实现需要多个研究方向的融合,包括机器学习、控制理论、计算机科学、人工智能和通讯技术等。
MACCS所使用的控制模型一般为分布式或集中式控制模型。
在集中式控制模型中,所有的智能代理都受到一个中央控制器的控制;而在分布式控制模型中,每个智能代理都可以独立运行,但它们需要通过协同工作来完成任务。
在MACCS的设计和实现中,智能代理一般可以分解为三个部分,即感知、控制和执行。
感知层是指智能代理对环境信息的感知和识别;控制层是指智能代理如何决策和制定控制策略;执行层是指智能代理输出信号指令并控制行动器的执行。
在MACCS的设计中,智能代理的控制往往采用了强化学习算法和博弈论等方法。
强化学习算法模拟了行为学习、评估和决策,以优化策略和增强智能代理的行为表现。
而博弈论则研究了智能代理在多用户和多策略环境中的取舍问题。
多智能体系统的协同控制算法设计与应用

多智能体系统的协同控制算法设计与应用随着科技的发展和人工智能的广泛应用,多智能体系统成为了一个热门研究领域。
多智能体系统指的是由多个智能体组成的系统,智能体之间通过通信和协同行动实现特定的任务。
在实际应用中,多智能体系统具有广泛的应用领域,例如无人车队、网络机器人、无人机编队等。
为了实现多智能体系统的协同工作,关键的一步是设计合适的协同控制算法。
本文将探讨多智能体系统的协同控制算法设计与应用的相关问题。
协同控制算法的设计对多智能体系统的性能和效率具有重要影响。
一个好的协同控制算法能够使多智能体系统以一种协调一致的方式工作,充分利用每个智能体的能力,提高系统的整体性能。
协同控制算法通常要解决的问题包括任务分配、路径规划、状态更新和信息交流等。
下面将具体介绍多智能体系统协同控制算法的设计和应用。
首先,任务分配是协同控制的基础。
在多智能体系统中,不同的智能体可能负责不同的任务,任务分配的目标是使系统中的每个任务都能被一个或多个智能体完成。
任务分配问题可以通过运用分布式算法来解决。
分布式算法是指将系统分为多个子系统,每个子系统只考虑与之相关的局部信息进行计算,最后以一种分布式的方式得出整体的解。
常用的任务分配算法包括双线性消减法、增量式任务分配法和利用图论的最小费用流算法等。
其次,路径规划是协同控制算法的重要组成部分。
在多智能体系统中,智能体需要根据任务和环境的要求规划出一条最优的路径,以实现任务的完成。
路径规划算法旨在找到最短路径或最优路径,减少智能体之间的冲突和碰撞。
常见的路径规划算法包括A*算法、D*算法和强化学习算法等。
A*算法是一种启发式搜索算法,通过评估路径长度和启发式函数来确定最佳路径。
D*算法则是一种增量搜索算法,它可以动态规划地修正路径并适应环境的变化。
而强化学习算法则通过智能体与环境的交互来学习最优路径。
另外,多智能体系统的状态更新也是协同控制算法需要解决的问题之一。
智能体的状态通常包括位置、速度和加速度等信息,根据状态更新的周期和精度的不同,可以分为离散状态更新和连续状态更新。
面向多机器人协同控制的智能调度系统的设计与实现

面向多机器人协同控制的智能调度系统的设计与实现发布时间:2021-09-15T08:09:35.979Z 来源:《科技新时代》2021年6期作者:刘清[导读] 针对这种情况,我们应积极探索面向多机器人协同控制的智能调度系统。
广东美房智星科技有限公司摘要:随着智能化以及自动化技术的发展与完善,机器人在生产中的应用越来越广泛,并且很多工程都实现了协同使用多种机器人同时进行生产。
但是在协同使用多种机器人过程中,多数都需要采用多种系统进行控制,这种方式由于系统之间存在壁垒,因此会影响信息的流通,同时也会影响到工厂的生产效率和质量。
针对这种情况,我们应积极探索面向多机器人协同控制的智能调度系统。
关键词:实时追踪;协同控制;智能调度系统;设计引言:目前,在工厂自动化生产中,对机器人的应用越来越广泛,借助机器人代替人为操作进行生产,既能避免人为操作失误,也能减少人工成本的投入,同时还有助于提升产品的生产效率,并且更好的宝藏产品的质量。
这是提升企业竞争力的有效措施,该系统的应用,极大地优化了工厂生产,节省了大量的时间成本,同时也在很大程度上提升了生产效率。
为了更加充分地发挥该系统的优势和作用,我们应加强对系统的设计研究,使其更加完善,功能更加全面,更好地为工厂生产服务。
1系统的设计方案要结合工程生产的实际需求,合理设计系统方案,是系统能够更好地满足生产需求,促进生产效率的提升。
首先要对移动料框的生产调度进行优化,实现对高边焊接区焊接机器人的自动取送料。
其次,要自动采集底层数据通讯,并实现对数据通讯的优化,系统针对AGV 的PLC控制器等设备进行实时的数据收集。
最后,结合优秀的算法推动整体效率的提升。
1.1针对系统软件功能的设计首先要对计划排程进行设计,计划令系统主要包括统计报表、基础数据管理、计划令管理以及系统管理等功能模块。
对于统计报表来讲,可以通过该模块查询计划令历史,同时也可以借助该模块来查询焊接历史。
就基础数据库管理来讲,主要包括举升形式、车型、焊接程序、焊接平台中各个零件种类的配置和焊接平台零部件的维修配置。
多智能体系统协同控制算法研究与应用
多智能体系统协同控制算法研究与应用多智能体系统的研究已经成为人工智能领域的重要研究方向之一。
在许多应用领域,如无人机编队、机器人协作和自主车辆等,多智能体系统的协同控制算法发挥着重要的作用。
本文将对多智能体系统协同控制算法的研究与应用进行探讨,并介绍一些常见的算法。
首先,对于多智能体系统的协同控制,最常用的算法之一是分布式控制算法。
分布式控制算法将系统的控制任务分解为不同智能体之间的局部控制任务,并通过局部信息交换和协同来实现整体控制目标。
例如,一种常用的分布式控制算法是一致性算法,它可以使多个智能体在没有中央控制器的情况下,通过交换彼此位置和速度的信息,达到一致的运动状态。
这种算法在无人机编队、机器人集群等应用中得到了广泛的应用。
其次,强化学习是另一种常见的多智能体协同控制算法。
强化学习通过智能体与环境的交互学习最优策略,可以应用于多智能体系统中。
例如,在自主车辆领域,多个车辆可以通过强化学习算法学习最优的行车策略,以实现交通流的优化和堵车减少。
此外,强化学习还可以用于机器人协作任务,例如多个机器人在协同合作中学习解决一个复杂的任务。
另外,博弈论是研究多智能体系统协同控制的重要工具之一。
博弈论可以用来描述和分析智能体之间的相互作用和决策过程,从而设计出有效的协同控制策略。
例如,通过博弈论,可以研究在资源有限的环境中,多个智能体之间如何进行资源分配以达到最优效益。
除了上述算法,还有一些其他的多智能体系统协同控制算法值得关注。
例如,网络控制算法可以利用网络结构来设计智能体之间的通信协议,实现分布式控制。
集合控制算法可以将多个智能体看作一个整体来进行控制,避免了分解控制任务的复杂性。
群体智能算法可以借鉴自然界中的群体行为现象,设计出模拟和优化群体行为的协同控制策略。
在应用方面,多智能体系统协同控制算法已经在许多领域取得了成功的应用。
例如,在无人机编队中,多台无人机通过协同控制算法可以实现编队飞行,以实现更高效的任务执行和飞行安全。
智能调度系统的设计与实现
智能调度系统的设计与实现随着科技的飞速发展和社会的不断进步,各种自动化和智能化的系统越来越得到广泛的应用和关注,智能调度系统就是其中之一。
智能调度系统是一种基于人工智能和大数据技术开发的智能化管理工具,它能够自主的分析数据、预测状况并进行决策,从而有效地提高资源利用效率、降低成本、优化服务质量,已经成为各行各业的关键技术之一。
一、智能调度系统的基本原理智能调度系统的基本原理是通过自主学习和深度分析大数据,构建出一套具备预测、决策、优化等多种功能的系统,从而实现资源调配、物流配送、工作排班等重要管理任务。
具体来说,智能调度系统的实现必须具备以下要素:1.面向目标:智能调度系统必须具备面向目标的特性,即能够对不同的目标进行分析和优化。
例如,对于地铁的运营管理,目标可能是保证车站换乘、列车换向的速度和准确性,减少乘客的等待时间和拥挤程度,并优化各种资源的利用率。
2.大数据分析:智能调度系统必须能够对大量的数据进行分析和处理,同时具备机器学习和深度学习的技术,能够识别和发现数据中的规律和模式,构建数据模型以提高准确性和精度。
3.智能决策:智能调度系统能够根据家里说过的需求或者数据分析结果进行决策,并且能够自主进行优化调整。
这要求系统具备一定的人工智能和数据挖掘能力,能够准确预测和掌握每个时刻的状态,为优化决策提供支持。
4.多目标优化:智能调度系统的优化过程通常有多个目标,因此它需要采用合适的多目标优化算法,以寻求最优的解决方案。
二、智能调度系统的设计和实现智能调度系统的设计和实现通常包括以下几个步骤:1.需求分析:智能调度系统的设计必须先进行需求分析,以确定其功能和目标,接着要确定调度领域的数据来源和预测对象。
2.数据处理和存储:智能调度系统的数据处理和存储是其设计的重要部分。
数据处理通常包括预处理、清洗和转换,数据存储可以采用关系型数据库、非关系型数据库以及分布式文件系统等方式进行。
3.算法选择和实现:智能调度系统需要选择适当的算法来实现其核心功能。
多智能体协同控制系统的设计与实现

多智能体协同控制系统的设计与实现近年来,随着智能化技术的发展,多智能体协同控制系统逐渐被广泛应用于各个领域,如机器人、自动化生产线和智能交通系统等。
这种系统采用分布式控制策略,使得多个智能体之间可以通过合作完成任务,而且协同效果会比单个智能体效果更好。
本文将介绍多智能体协同控制系统的设计与实现。
一、多智能体协同控制系统的基本原理多智能体协同控制系统由多个智能体组成。
每个智能体具有自主性和协同性。
自主性是指每个智能体都可以进行局部决策,并根据自身的感知、认知和决策进行相应的动作。
协同性是指智能体可以通过信息交互,共同完成一定的任务,并实现全局最优。
多智能体协同控制系统的基本原理是分布式控制。
系统中不同的智能体之间通过信息交互实现合作,每个智能体具有一定的控制权,可以根据局部环境信息和任务要求进行相应的动作。
同时,智能体之间也存在着协同关系,相互协调完成任务,从而达到全局最优。
二、多智能体协同控制系统的设计与实现需要考虑多个方面,如智能体的定义、智能体之间的通信、决策和控制等。
下面将详细介绍多智能体协同控制系统的设计与实现。
1. 智能体的定义不同的任务需要不同的智能体。
根据任务类型和要求,可以定义不同类型的智能体。
智能体通常包括以下几个方面:(1)感知模块,用于感知环境和获取信息;(2)决策模块,用于根据环境信息和任务要求进行决策;(3)控制模块,用于实施动作和控制运动。
2. 智能体之间的通信多智能体协同系统需要进行信息交互和协同决策。
因此,在设计和实现过程中必须考虑智能体之间的通信协议和通信方式。
常用的通信协议包括TCP、UDP、FTP等。
通信方式有多种,如广播、单播、多播等。
确定合适的通信协议和通信方式可以保证多智能体之间的信息交流和合作顺畅。
3. 决策与控制在多智能体协同系统中,每个智能体需要根据自身的感知和任务要求进行决策和控制。
这需要引入分布式控制策略,将任务划分成不同的子任务,并给不同的智能体分配相应的任务。
多智能体系统的协同控制算法设计与仿真
多智能体系统的协同控制算法设计与仿真近年来,随着人工智能技术的迅速发展,多智能体系统逐渐成为研究的热点。
多智能体系统是由多个智能体组成的集合体,每个智能体都具有一定程度的自主性和智能性。
多智能体系统的设计与控制是一个复杂且具有挑战性的问题,如何使多个智能体之间协同工作以达到特定的目标是当下的研究重点。
本文将探讨多智能体系统的协同控制算法设计与仿真。
一、多智能体系统的定义与特点多智能体系统是由多个智能体组成的集合,每个智能体都具有一定程度的自主性和智能性。
与传统的单智能体系统相比,多智能体系统更加复杂和有挑战性。
多智能体系统具有以下几个特点:1. 分布性:多个智能体在系统中分布,并从不同的角度来感知、处理和决策。
2. 协同性:智能体之间需要相互合作和协同工作,以实现共同的目标。
3. 自适应性:多智能体系统需要具备自适应能力,能够对环境的变化和其他智能体的行为做出相应的调整。
4. 鲁棒性:多智能体系统需要具备鲁棒性,即在面对各种干扰和噪声时仍能保持稳定和正确的协同行为。
二、多智能体系统的协同控制算法设计多智能体系统的协同控制算法设计是一项复杂而重要的任务,它关乎整个系统的性能和效果。
以下是一些常用的多智能体系统协同控制算法:1. 一致性控制算法:该算法的目标是使所有智能体在系统中达到一致的状态。
通过调节智能体之间的通信和相互作用,可以实现一致性控制。
2. 分工合作算法:该算法通过将系统任务进行分解和分配,使不同的智能体承担不同的责任和任务,以达到高效的协同工作。
3. 契约网络算法:该算法通过制定契约和规则来引导智能体的行为,以实现系统整体目标的最大化。
4. 强化学习算法:该算法利用奖励和惩罚机制来引导智能体的学习和决策,以达到最优的协同控制效果。
三、多智能体系统的协同控制算法仿真多智能体系统的协同控制算法仿真是研究多智能体系统性能和效果的重要手段。
通过仿真可以评估不同算法在各种情况下的性能,为实际系统的应用提供指导。
多机器人协调系统的构建与控制
安全防护技术
研究多机器人协调系统的安全防护技术,保 障系统的安全稳定运行。
THANKS
谢谢您的观看
分散式控制策略
总结词
每个机器人独立进行决策和控制,仅通过局部信息进行交互。
详细描述
分散式控制策略将机器人系统中的每个机器人视为独立个体,每个机器人根据自身的传感器信息和局 部环境信息进行决策和控制。这种策略具有较好的鲁棒性和扩展性,但可能无法实现全局最优控制, 且在机器人之间需要建立有效的通信机制以实现协作。
混合式控制策略
总结词
结合集中式和分散式的优点,既实现全 局最优控制,又具有较好的鲁棒性和扩 展性。
VS
详细描述
混合式控制策略结合了集中式和分散式控 制策略的优点,通过中央控制器进行全局 规划和决策,同时每个机器人根据局部信 息和中央控制器的指令进行独立决策和控 制。这种策略能够提高系统的性能和鲁棒 性,适用于大规模、复杂的多机器人系统 。
协同包装
通过多机器人协同作业,完成大型产品的包装、码垛等环节,提高包装效率与 自动化水平。
农业领域应用
精准农业
多机器人协调系统在农业领域中用于实现精准播种、施肥、喷药、收割等作业,提高农 业生产效率与资源利用率。
智能温室
多机器人协同控制温室内环境,如温度、湿度、光照等,为农作物提供最佳的生长条件 。
特点
多机器人协调系统具有灵活性、高效 性、协同性和自适应性等特点,能够 完成复杂、大规模和动态的任务,提 高整体性能和效率。
协调系统的应用场景
物流配送
01
多机器人协调系统可用于自动化仓库管理、货物分拣和配送等
环节,提高物流效率。
灾难救援
02
在灾难现场,多机器人协调系统可以协同完成搜索、救援和物
多智能体系统中的协同控制技术设计
多智能体系统中的协同控制技术设计多智能体系统是指由多个智能体协调合作实现某个共同目标的系统。
在现实生活中,我们可以看到许多多智能体系统的应用,例如群体机器人协同工作、无人驾驶车辆的交通协调等。
为了实现多智能体系统的协同控制,需要设计相应的协同控制技术。
协同控制是指多个智能体通过相互协作,共同实现某个任务或目标。
在多智能体系统中,每个智能体都有自己的感知、决策和执行能力,可以独立地完成一部分工作,同时需要与其他智能体进行信息交流和协调,以实现整体的目标。
协同控制技术的设计旨在提高系统的整体性能,优化资源利用和任务完成效率。
在设计多智能体系统的协同控制技术时,需要考虑以下几个关键问题:首先,需要确定系统的协同目标。
协同目标是指多智能体系统共同追求的任务或目标。
在确定协同目标时,需要考虑系统的整体性能和各个智能体的局部目标之间的平衡。
例如,在群体机器人协同工作的场景中,协同目标可以是尽快完成一项任务,同时确保每个机器人的安全和有效性。
其次,需要设计合适的信息交流和协调机制。
信息交流是多智能体系统中实现协同控制的基础。
智能体通过交换信息来了解其他智能体的状态和意图,从而作出合适的决策。
信息交流可以通过直接通信、广播、传感器数据共享等方式实现。
协调机制是指智能体之间通过协商和合作来实现整体目标的方式。
例如,在无人驾驶车辆系统中,不同车辆可以通过交换位置和速度等信息来协调行驶路径,避免碰撞和拥堵。
另外,需要考虑智能体之间的分工和合作策略。
在多智能体系统中,每个智能体需要根据自身的能力和任务要求,合理地分配工作和协调合作。
例如,在一个拆解任务的多机器人系统中,不同机器人可以根据自身的特点和能力,合理地分工完成不同部分的工作,然后通过协同控制来实现整体拆解目标。
此外,需要设计合适的决策算法和控制策略。
决策算法是指智能体根据感知和目标信息,确定自身行为和动作的方法。
控制策略是指智能体根据决策结果进行具体的执行行动。
多机器人系统协同作业调度算法研究与应用

多机器人系统协同作业调度算法研究与应用随着科技的不断发展,多机器人系统的应用越来越广泛。
多机器人系统可以同时执行多个任务,提高工作的效率和质量。
然而,如何合理地调度多机器人系统,以使每个机器人能够高效地完成自己的任务,并且协调好不同机器人之间的工作,是一个非常复杂且具有挑战性的问题。
在多机器人系统中,协同作业调度是一个核心问题。
它涉及到多个机器人之间的任务分配、路径规划、资源分配等方面的调度问题。
对于一个有效的调度算法来说,需要考虑以下几个方面的问题。
首先,任务分配是一个重要的问题。
在多机器人系统中,任务可以根据不同的优先级和难度分配给不同的机器人。
在分配任务时,需要综合考虑机器人的能力、执行时间以及任务的紧急程度等因素。
一个优秀的调度算法应该能够根据任务的特点,合理地分配任务,以提高整个系统的效率。
其次,路径规划是一个关键的问题。
在多机器人系统中,每个机器人都有自己的路径规划算法,将其任务完成的路径规划到系统中。
这意味着每个机器人应该能够找到自己的最佳路径,以及避免与其他机器人发生碰撞。
一个好的调度算法应该能够协调不同机器人的路径,使它们之间能够高效地协同工作。
再次,资源分配是一个重要的问题。
在多机器人系统中,每个机器人都有自己的资源,包括传感器、能源等。
一个合理的调度算法应该能够根据每个机器人的资源情况,合理地分配资源,以提高工作的效率。
同时,还应考虑到资源的限制,以避免出现资源浪费或者不足的情况。
最后,协调工作是一个关键的问题。
在多机器人系统中,不同的机器人可能需要相互协作,以完成任务。
一个好的调度算法应该能够协调不同机器人之间的工作,避免出现冲突或者竞争的情况。
同时,还应考虑到机器人之间的沟通和协调问题,以确保整个系统的顺利运行。
针对以上问题,已经提出了多种多机器人系统协同作业调度算法。
例如,基于分层网络的调度算法可以有效地分配任务和资源,以及协调机器人之间的工作。
同时,也有一些基于智能优化算法的调度算法,通过优化算法求解最佳调度方案,以提高整个系统的效率。
人工智能驱动下的多智能体协同控制系统设计

人工智能驱动下的多智能体协同控制系统设计随着人工智能技术的发展与应用,多智能体协同控制系统得到了广泛的关注和研究。
这种控制系统将多个智能体协同工作,共同完成一个任务,可以应用于无人机自主飞行、协同机器人合作完成任务、互联网大规模数据处理等众多领域。
本文将通过介绍人工智能的基本概念,分析多智能体协同控制系统的设计、实现和应用,探讨其在实际生产和服务中的应用前景。
一、人工智能概述人工智能的本质是利用计算机技术解决认知、学习和创造等问题的理论研究与工程实践,是通过模拟和超越人类智能水平的一种新型智能系统。
人工智能技术主要包括机器学习、模式识别、自然语言处理、数据挖掘、计算智能等分支领域。
其中,机器学习被视为人工智能的核心,即利用算法和统计方法构建模型,从数据中学习规律并进行预测和判断。
二、多智能体协同控制系统多智能体协同控制系统是利用人工智能技术和控制理论构建的一种复杂控制系统。
它由多个智能体协同工作完成一项复杂任务,包括协作、竞争和冲突处理等多种交互方式。
多智能体系统具有高度的自主性和灵活性,能够应对复杂、动态的环境。
在多智能体系统中,每个智能体都有独立的决策能力和控制系统,并通过网络互相通信。
针对特定任务设计的智能体拥有不同的特性和功能,它们之间可以协作也可以竞争,通过多种协同方式解决任务的复杂问题。
例如,无人机在监测林区火灾时,可以利用卫星图像识别技术进行火源定位,同时利用自身控制系统自主飞行,完成监测、报警等任务。
三、多智能体协同控制系统的设计实现设计制定多智能体协同控制系统需要充分考虑系统的复杂性和自适应性。
具体的设计实现包括以下几个方面:1. 建立基本模型。
多智能体系统中需要将任务分解为子任务,并建立智能体之间的关系,考虑智能体之间的协同、竞争和冲突处理等。
2. 制定决策算法。
设计多智能体系统所用的算法需要满足以下几个条件:集成化、高效性、灵活性、健壮性、可扩展性等,智能体可根据实时信息共同制定决策方案。
基于人工智能技术的智能电梯调度系统设计与实现
基于人工智能技术的智能电梯调度系统设计与实现智能电梯调度系统是基于人工智能技术的一种先进的电梯管理系统。
通过利用人工智能算法和大数据分析技术,该系统可以实现电梯调度的智能化、高效化和节能化。
本文将对智能电梯调度系统的设计和实现进行详细介绍。
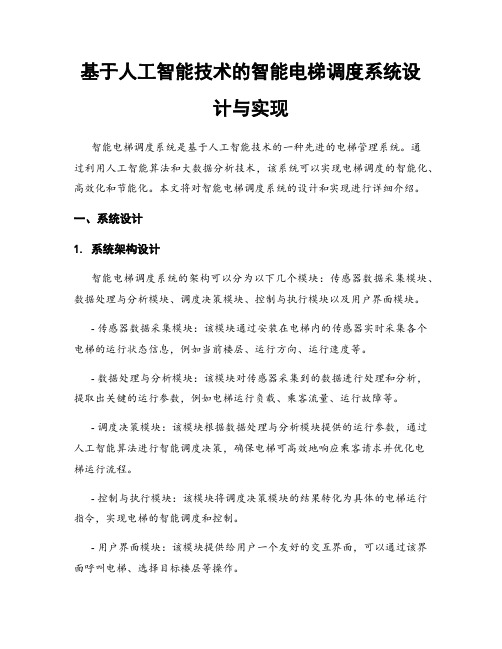
一、系统设计1. 系统架构设计智能电梯调度系统的架构可以分为以下几个模块:传感器数据采集模块、数据处理与分析模块、调度决策模块、控制与执行模块以及用户界面模块。
- 传感器数据采集模块:该模块通过安装在电梯内的传感器实时采集各个电梯的运行状态信息,例如当前楼层、运行方向、运行速度等。
- 数据处理与分析模块:该模块对传感器采集到的数据进行处理和分析,提取出关键的运行参数,例如电梯运行负载、乘客流量、运行故障等。
- 调度决策模块:该模块根据数据处理与分析模块提供的运行参数,通过人工智能算法进行智能调度决策,确保电梯可高效地响应乘客请求并优化电梯运行流程。
- 控制与执行模块:该模块将调度决策模块的结果转化为具体的电梯运行指令,实现电梯的智能调度和控制。
- 用户界面模块:该模块提供给用户一个友好的交互界面,可以通过该界面呼叫电梯、选择目标楼层等操作。
2. 数据分析与人工智能算法智能电梯调度系统需要对大量的数据进行分析和处理,以获取电梯的当前状态和运行参数。
同时,针对电梯乘客的需求进行预测和优化,应用人工智能算法进行调度决策。
在数据分析方面,可以采用机器学习和数据挖掘等技术,通过历史数据的学习和建模,对电梯的运行特征进行分析和预测。
例如,可以通过分析乘客流量和电梯运行速度的关系,优化电梯的调度策略,减少乘客的等待时间和电梯的运行时间。
在调度决策方面,可以应用强化学习算法,通过与环境的交互,学习最优的调度策略。
这种方法可以根据电梯的运行状态和乘客的呼叫请求,动态地决策电梯的运行方向和停靠楼层,提高电梯的响应速度和运行效率。
二、系统实现1. 硬件设备与传感器安装智能电梯调度系统的实现需要配备相应的硬件设备和传感器。
基于ROS的多机器人协作控制系统设计与实现
基于ROS的多机器人协作控制系统设计与实现随着机器人技术的不断发展和普及,多机器人协作控制系统在各个领域的应用越来越广泛。
基于ROS(Robot Operating System)的多机器人协作控制系统设计与实现,成为了当前研究的热点之一。
本文将针对该主题展开深入研究和讨论。
首先,我们需要明确多机器人协作控制系统的概念和意义。
多机器人协作控制系统是指利用多个机器人协同工作,共同完成一个复杂任务的系统。
这样的系统不仅可以提高工作效率,还可以提高工作的稳定性和可靠性。
因此,设计和实现一个高效的多机器人协作控制系统对于提升机器人应用水平具有重要意义。
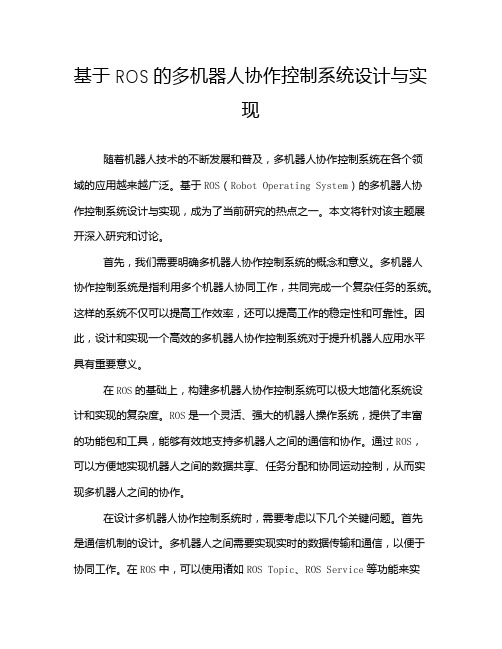
在ROS的基础上,构建多机器人协作控制系统可以极大地简化系统设计和实现的复杂度。
ROS是一个灵活、强大的机器人操作系统,提供了丰富的功能包和工具,能够有效地支持多机器人之间的通信和协作。
通过ROS,可以方便地实现机器人之间的数据共享、任务分配和协同运动控制,从而实现多机器人之间的协作。
在设计多机器人协作控制系统时,需要考虑以下几个关键问题。
首先是通信机制的设计。
多机器人之间需要实现实时的数据传输和通信,以便于协同工作。
在ROS中,可以使用诸如ROS Topic、ROS Service等功能来实现机器人之间的通信。
其次是任务分配和协同控制算法的设计。
多机器人在完成任务时需要进行任务分配和协同控制,这就需要设计合适的算法来实现。
常见的算法包括基于领导者-跟随者模式、分布式控制算法等。
最后是系统的实时性和稳定性。
多机器人之间的协作需要保证系统的实时性和稳定性,否则容易引发系统故障和任务失败。
为了验证多机器人协作控制系统的设计和实现效果,我们可以通过仿真和实验进行评估。
在ROS中,可以使用Gazebo仿真环境进行机器人协作控制系统的仿真实验。
通过仿真实验,可以评估系统设计的合理性和有效性。
同时,还可以在实际机器人平台上进行实验验证,进一步验证系统的稳定性和可靠性。
多智能体系统下的协同控制算法设计
多智能体系统下的协同控制算法设计摘要:多智能体系统由于其具有分布式、并行处理和协同工作的能力,被广泛应用于机器人、传感器网络、无人机等领域。
协同控制算法是多智能体系统中保持一致性、协同工作的关键问题。
本文将介绍多智能体系统下的协同控制算法设计的基本原理和常见方法,并讨论其在实际应用中的挑战和未来发展方向。
1. 引言多智能体系统由多个具有自主决策能力的智能体组成,通过相互通信和合作实现共同目标。
在多智能体系统中,协同控制算法被用于保持一致性、分工合作、避免冲突等方面。
协同控制算法的设计对于多智能体系统的性能和效果具有重要影响。
2. 多智能体系统的协同控制算法设计基本原理多智能体系统的协同控制算法设计的基本原理是借鉴集合智慧和分布式控制理论。
首先,通过建立模型描述多智能体系统的动力学,然后设计控制策略使得各个智能体协同工作实现共同目标。
协同控制算法通常包括局部信息交换、合作决策和全局规划等过程。
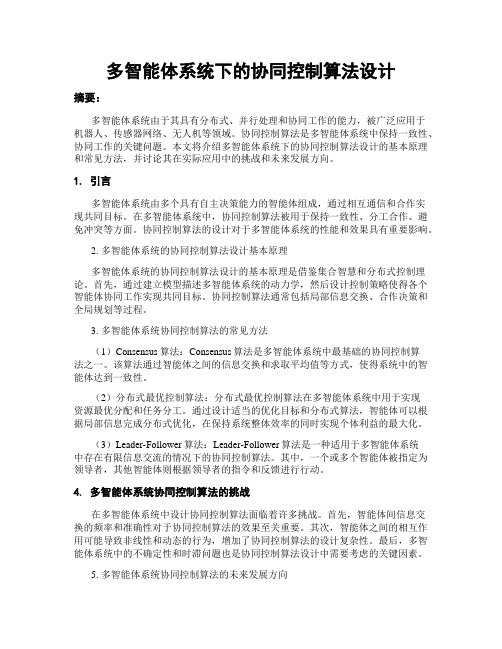
3. 多智能体系统协同控制算法的常见方法(1)Consensus算法:Consensus算法是多智能体系统中最基础的协同控制算法之一。
该算法通过智能体之间的信息交换和求取平均值等方式,使得系统中的智能体达到一致性。
(2)分布式最优控制算法:分布式最优控制算法在多智能体系统中用于实现资源最优分配和任务分工。
通过设计适当的优化目标和分布式算法,智能体可以根据局部信息完成分布式优化,在保持系统整体效率的同时实现个体利益的最大化。
(3)Leader-Follower算法:Leader-Follower算法是一种适用于多智能体系统中存在有限信息交流的情况下的协同控制算法。
其中,一个或多个智能体被指定为领导者,其他智能体则根据领导者的指令和反馈进行行动。
4. 多智能体系统协同控制算法的挑战在多智能体系统中设计协同控制算法面临着许多挑战。
首先,智能体间信息交换的频率和准确性对于协同控制算法的效果至关重要。
其次,智能体之间的相互作用可能导致非线性和动态的行为,增加了协同控制算法的设计复杂性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Computer Science and Application 计算机科学与应用, 2019, 9(8), 1507-1518Published Online August 2019 in Hans. /journal/csahttps:///10.12677/csa.2019.98169Design and Implementation of IntelligentScheduling System for Multi-RobotCollaboration ControlWeixing Su, Tongsen XueSchool of Computer Science and Technology, Tianjin Polytechnic University, TianjinReceived: Jul. 27th, 2019; accepted: Aug. 8th, 2019; published: Aug. 15th, 2019AbstractAt present, in the factories that use a variety of robots to achieve the production purpose, most of the systems exist at the same time. Data have information barriers between multiple systems, and production efficiency is also insufficient due to sluggish information flow. Aiming at this situation and based on the practical project of Juntong Dumping Workshop, this paper proposes a solution of multi-robot collaborative automation intelligent dispatching system based on OPC industry standard data acquisition and Socket communication technology. It uses Kepware tool to read and write data IO points of PLC. The data acquisition objects include CLOOS welding robot, SINSUN AGV and tooling library, realizing real-time monitoring of on-site data receiving, circulation and recy-cling, making the information of each robot between them summarized and the status of various robots monitored and managed in real time. At the same time, the intelligent scheduling strategy is used to control the types of box materials in production and optimize the production path and realize flexible manufacturing. This scheme can increase the output of box materials and control the types of materials to prevent the surplus of single materials and improve overall production efficiency and time cost.KeywordsReal-Time Tracking, Flexible Manufacturing, Automatic Management, Socket NetworkCommunication, Multi-Robot Collaboration, Path Optimization面向多机器人协同控制的智能调度系统的设计与实现苏卫星,薛桐森天津工业大学,计算机科学与技术学院,天津苏卫星,薛桐森收稿日期:2019年7月27日;录用日期:2019年8月8日;发布日期:2019年8月15日摘 要目前在对于协同使用多种机器人达到生产目的工厂中,多数同时存在多种系统,数据在多系统之间存在信息壁垒,生产效率也因为信息流通迟滞而比较不足。
针对这种现状并在骏通自卸车间实践项目基础上提出一种基于OPC 工业标准的数据采集以及Socket 通信技术的多机器人协同自动化智能调度系统的解决方案。
使用Kepware 工具对PLC 的数据IO 点进行读取和写入等交互操作,数据采集对象包括CLOOS 焊接机器人,SINSUN 的AGV 以及工装库,实现对现场数据接收、流转、回收的实时监控,使得各机器人之间的信息得到汇总,并对各种机器人的状态进行实时监控与管理。
同时利用智能调度策略来对生产中箱板材料种类进行控制并进行生产路径优化并实现柔性制造,该方案可以使箱板材料产量增加,并对材料种类进行控制,防止出现单一材料过剩,同时提高整体生产效率以及时间成本。
关键词实时追踪,柔性制造,自动化管理,Socket 网络通信,多机器人协同,路径优化Copyright © 2019 by author(s) and Hans Publishers Inc.This work is licensed under the Creative Commons Attribution International License (CC BY). /licenses/by/4.0/1. 引言现如今企业面临着日益激烈的国际竞争,要想赢得市场、赢得用户就必须通过实施MRPII/ERP 来加强管理。
然而上层生产计划管理受市场影响越来越大,明显感到计划跟不上变化。
而在执行层面,越来越多的机器人被投入到生产重复且人为操作失误率较高的可替代操作中,而当面对客户对交货期的苛刻要求,面对更多产品的改型,订单的不断调整,企业如何最大化产量,并且达到产品种类的均匀分布成为一个亟待解决的问题,在有限的空间中寻找最佳的路径来最大化利用机器生产,并且减少人为操作带来的失误性操作就是本智能调度系统想去解决的问题。
而传统生产现场管理只是一个黑箱作业,这已无法满足今天复杂多变的竞争需要。
因此如何将黑箱作业透明化,找出任何影响产品品质和成本的问题,提高计划的实时性和灵活性,同时又能改善生产线的运行效率已成为目前每个企业十分关心的问题。
因此本文探索一种,对多机器人信息实现整合与提炼并进行智能路径优化的方法[1] [2]。
在基于当前生产环境下,对基础数据进行整理包括设备各种状态与维护,梳理网络拓扑结构,合理进行数据采集,通过建立在智能算法策略基础上的调度系统,来优化生产路径以及材料种类的均衡,为提高生产效率、节约时间成本奠定了基础。
2. 系统总体设计方案[3]提升整体成品工料的产出效率,成品工料的生产种类需要均衡生产。
项目为了提高生产节奏,提升生产效率,主要进行以下内容攻关:1) 自卸车的生产调度涉及生产计划的手工下达,底板、前箱、后箱、侧箱、副车架、高边焊接区焊接机器人的取送料AGV 、RGV 调度,焊接工位及RGV 库位的管理。
2) 对底层数据通讯进行采集与优化,采集设备对象包括上料台扫码枪,AGV 的PLC 控制器,工位机器人的PLC 控制器,承载工装入库扫码枪以及二楼工装库、RGV 。
在生产运行过程中,需要对这些设备进行实时数据读取与写入等操作。
3) 利用算法来提升整体效率,本项目组采用自行研发的算法进行调度,算法结合了高响应算法和先来先服务以及优先级调度算法的优点,具有多输入定尺度高响应功能,最大程度苏卫星,薛桐森发挥车间设备的生产运行效率。
2.1. 系统软件功能设计[4]根据现场情况,需要进行基础数据的维护和生产计划的维护以及统计报表等,划分为计划令系统与智能调度监控系统两个子系统,并共用同一数据库。
2.1.1. 计划令系统此系统划分为基础数据管理、计划令管理、统计报表、系统管理4个主要功能模块:1) 基础数据管理包括车型、零件种类、车厢尺寸、举升形式、开门形式、焊接程序、承载工装、2层工装库库位、焊接台零件类型配置、焊接台以及AGV车的维护配置;2) 计划令管理,包括计划令、上料台以及焊接任务管理;3) 统计报表包括焊接历史查询以及计划令历史查询;4) 系统管理包括用户、角色以及功能模块的权限管理。
2.1.2. 智能调度监控系统此系统则是一套实时监控并通过基于OPC工业标准的数采技术来收集PLC的实时数据,生产管理人员可以更加直观并且实时的观察生产过程中的各个部分达到生产管理的透明化,并通过算法对整体系统进行指令的下发从而调动硬件设备实现自动化生产。
调度系统是基于计划令系统上的基础数据来对生产状态进行控制且与计划令系统都基于统一的数据库,智能调度系统包括:1) 显示界面模块,显示界面包括菜单栏、焊接台状态监控、工装库状态监控、AGV状态监控、任务状态监控以及日志监控信息;2) 系统初始化管理模块,系统初始化管理针对焊接台初始化以及2楼工装库初始化;3) 监控管理模块;4) 生成任务管理模块;5) 手动任务模块,则是通过OPC通讯可以对不同硬件PLC进行单独的指令下发与调试;6) 任务管理模块,包括当前任务管理以及任务历史记录,各自下属分为机器人任务,AGV任务,工装库任务。
2.2. 底层数据通讯系统体系结构[5]车间内需要调度和通讯的设备包括:上料台扫码器,AGV车辆调度系统,工装库管理系统,工位焊接机器人和工装入库扫码器。
这些设备的状态信息,在生产运行时需要实时进行不断交互、读取和写入等;完成和实现状态交互的就是此处要介绍的数据库系统。
底层设备集成通讯包括AGV,6轴机械臂(进口设备),和其它相关PLC系统。
通过组态网络或其它直连方式,实现底层设备与数据通讯中心的信息交互。
2.3. 车间网络以及硬件布局结构在总控室中包含智能调度系统,调试用测试机,总数据库以及一台与硬件设备核心交换机相连的总控室交换机用于对数据连接,总控室是用来总体的显示给管理人员直观的数据展示,包括对焊接台、AGV车辆、工控机以及工装库的运行等各方面的细节,用直观的图文数据形式来实时的显示在系统屏幕中,使得整体车间运行中的各项数据指标透明化,更加的便于对细节的掌控,同时对后续系统优化可以提供重要的参数数据。