多普勒天气雷达原理与应用8-雷达探测算法(3)
多普勒雷达技术及其在气象预报与空管管理上应用

多普勒雷达技术及其在气象预报与空管管理上应用简介多普勒雷达技术是一种利用多普勒效应测量目标运动速度的无线电技术。
它可以有效地探测目标的速度、方向和位置,因此在气象预报和空管管理等领域广泛应用。
本文将介绍多普勒雷达技术的原理、应用以及其在气象预报与空管管理上的重要性。
多普勒雷达技术原理多普勒雷达技术基于多普勒效应,通过测量目标反射回来的电磁波频率的变化来计算目标的速度、方向和位置。
当雷达波束与运动目标相对运动时,反射回来的电磁波频率发生了变化。
根据多普勒效应的原理,目标向雷达靠近时回波频率增加,目标远离雷达时回波频率减小。
利用这种频率变化,可以计算出目标的运动速度和方向。
多普勒雷达技术应用于气象预报气象预报是多普勒雷达技术最常见的应用之一。
多普勒雷达可以探测并跟踪雷暴中的风暴系统,提供关键的数据用于预测天气变化。
它可以测量风暴云中降水的速度和方向,精确地确定降雨的位置、强度和移动轨迹。
通过分析多普勒雷达获取的数据,气象学家可以预测冰雹、风暴、龙卷风等极端天气事件的发生与发展趋势。
基于这些预测结果,相关部门可以针对性地发布预警信息,提醒民众采取适当的防护措施,减少灾害风险。
另外,多普勒雷达还可以用于检测大气中的微生物颗粒和花粉等物质,为花粉过敏患者提供准确的花粉浓度信息,帮助他们合理安排活动和用药。
多普勒雷达技术应用于空管管理空中交通管制是多普勒雷达技术的另一个重要应用领域。
监控飞行器的位置和速度对于确保航空安全至关重要。
多普勒雷达可以提供准确的飞行器速度和高度数据,帮助空管部门进行实时的飞行器跟踪和飞行路径规划。
通过多普勒雷达技术,空管部门可以及时发现和解决飞行器之间可能出现的冲突,确保航班的平稳运行。
同时,多普勒雷达还可以检测并预警可能出现的天气变化,提供天气信息给飞行员,帮助其做出合理的航线调整和决策。
多普勒雷达技术的重要性多普勒雷达技术在气象预报和空管管理上的应用,为我们提供了更准确、及时的信息,为人们的生命和财产安全提供了重要保障。
多普勒天气雷达原理与业务应用
多普勒天气雷达原理与业务应用摘要:多普勒雷达是世界上目前为止最先进的雷达,有“超级千里眼”之称。
相较于传统天气雷达,多普勒天气雷达能够监测到与地面垂直距离在8-12公里范围内的对流云层的产生和变化,能够判断云层的移动速度,对于天气的预报结果而言会极大的减小误差。
为了对天气进行精准预测,各类型的天气探测设备不断涌现,本文主要是对多普勒天气雷达的原理和应用范围进行简单分析。
关键词:多普勒天气雷达、原理、应用引言:随着科学技术的发展和社会的进步,人们对不可控事物的掌控欲望逐步增强。
天气的变化是影响人们劳作、改变人们生活规律的主要原因,以前天气的不可预测性使人们不能够根据天气进行合理的劳作安排。
因此人们开始向探测天气方面进行研究,多普勒天气雷达是目前为止最有效的天气探测设备。
其应用范围宽泛,探测效果优良。
天气雷达的工作原理和普通的雷达一样,通过定期向高空发射电磁脉冲,之后通过接收器接受被高空气象反射回来的电磁脉冲,并通过计算机进行处理和显示,达到探测天气的目的。
1842年,奥地利数学家多普勒在经过铁路交叉处时,发现了火车由远及近时汽笛声变响,反之亦然。
他对这种现象进行研究,研究表明这种现象时由于震源与观察者之间产生了相对运动。
后人为了纪念,将这种现象称之为多普勒现象。
二十世纪七十年代以来,多普勒效应被广泛用于武器火控和天气探测等方面。
多普勒天气雷达比一般天气雷达发射的电磁脉冲波长更短,并且能够在探测降雨位置、强弱基础上可以帮助分析天气的性质以及对流天气等[1]。
多普勒天气雷达的主要应用领域1.强对流天气的监测和预警强对流天气包括雷暴、雷暴大风、冰雹、暴雨和龙卷风等天气现象。
一般而言,强对流天气都是危险天气,对于人们的日常生活和社会生产会产生重大影响。
因此对于强对流天气的监测显得尤为重要,多普勒天气雷达对于研究强对流天气具有重要意义。
对于风暴的研究,不同的角度具有不同优劣性,从简单的二维回波区域到具备显示具有物理意义的三维虚拟体,为强对流天气的跟踪和提前预测展开了新的发展层面。
多普勒天气雷达技术在天气预报中的应用研究

多普勒天气雷达技术在天气预报中的应用研究天气预报一直是人们非常关注的话题,预报准确度越高,对人们的生产、生活、出行等方面的影响也就越大。
随着科技的发展,多普勒天气雷达技术被广泛应用于天气预报中,它的出现大大提高了天气预报的准确性,对社会的发展产生了积极的影响。
一、多普勒天气雷达的基本原理多普勒天气雷达是一种测量降雨信息的设备,它主要是以微波的特性来进行信号扫描,可以在室内通过电脑来进行分析。
它的基本原理是利用雷达波束的频率差异,来确定降水粒子的速度以及其运动方向。
当雷达波经过降雨粒子时,粒子所带有的速度会对雷达波的频差造成影响,从而使得雷达信号出现了“频移”。
二、多普勒天气雷达在天气预报中的应用在天气预报中多普勒天气雷达技术的应用,主要是用来分析和预测降雨的状况。
通过多普勒雷达技术,天气预报人员可以更准确地测量降雨强度、降雨率和降雨的时间等信息,并且可以及时掌握风向、风速和预计的强度。
同时,还可以通过雷达数据的分析,了解冰雹、飞沫、雾霾等特殊降水情况。
1.实时更新天气数据多普勒天气雷达的优势在于数据的实时更新,能够相对准确预报未来的天气情况。
在多普勒天气雷达的帮助下,气象专家和相关部门能够更加及时地掌握到天气情况的变化。
2.提高天气预报的准确性利用多普勒天气雷达技术,天气预报可以更加精准逼真。
天气预报人员可以对降水强度、降雨率、降雨时间以及降雨位置进行精准掌握,使得天气预报的准确度得到了大幅提高。
三、多普勒天气雷达技术在不同场合下的应用1.气象预警和预报通过多普勒天气雷达技术,我们不仅可以及时得知降水情况,还能对强雷暴、龙卷风等极端天气进行预警,有效避免了因恶劣天气带来的不利影响。
2.水利灾害预测多普勒天气雷达技术还可广泛应用于水利灾害预测中,如山洪、泥石流等。
通过精准测量降雨信息,可以及时发布预警信息避免灾害的发生。
3.农业生产多普勒天气雷达技术还被广泛应用于农业生产中,通过及时地获取降雨情况,可以为农民们提供更加精准的农业气象服务,帮助农民制定农业生产计划。
多普勒雷达技术及其应用

多普勒雷达技术及其应用一、引言多普勒雷达技术是一种利用声波的回波来测量目标的速度的识别技术。
它已经被广泛应用于气象、交通、国防、环保、地震、钻探等领域。
本文将对多普勒雷达技术的原理、构成、应用进行系统介绍。
二、多普勒效应原理多普勒效应指的是一种物理现象,当发射器和接收器在相对运动时,回波的频率会因为目标的运动速度而发生变化。
这种现象被称为多普勒效应。
其实现原理在于目标的速度会改变回波的相位和频率,从而使回波波长发生变化。
三、多普勒雷达技术构成多普勒雷达技术主要包括发射机、天线、接收机、信号处理系统、控制系统等。
其中发射机和接收机都是由内部谐振器驱动,通过放大器进行功率放大,天线则负责将电磁波通过空气向目标传输和接收返回波信号。
信号处理系统则负责处理这些波信号的反射和散射。
控制系统则负责控制整个系统的运行,以及收集信息和进行处理和分析。
四、多普勒雷达技术应用利用多普勒雷达技术,可以对雷暴云的运动状态、内部结构、强度、水汽含量等进行预报和研究,对于气象行业来说,这种技术的应用十分重要。
多普勒雷达技术在气象预警、天气预报、暴雨监测等方面得到了广泛应用。
(二)航空领域在无人机、小型飞机、飞行器等航空器的航行和控制中,多普勒雷达技术可以提供精确的速度、风速、空气密度、高度等信息,以帮助飞行人员进行精细化的控制和管理。
多普勒雷达还可以被用来检测航空器的状况和维修需求。
(三)交通领域在交通领域,多普勒雷达可以帮助交通管理部门监测车辆的速度和密度,进行交通拥堵的预测和管理。
多普勒雷达系统还可以被集成到交通信号灯中,以帮助行人和汽车在道路上的方向和速度。
(四)国防领域在国防领域,多普勒雷达技术可以被用来进行侦察、监测、探测和指引导弹、炮弹、卫星等的轨道和目标。
多普勒雷达技术在常规和太空战争中都扮演着重要角色。
多普勒雷达技术还可以用来监测地震活动和地质灾害发生的位置和时间情况,以便对相关地区进行预防和应急处理。
该技术可以通过检测地下的地表运动,测得地震波的传播速度和传播方向,从而准确判断地震活动的强度和方向。
6、多普勒天气雷达原理与应用.doc
第六部分 多普勒天气雷达原理与应用(周长青)我国新一代天气雷达原理;天气雷达图像识别;对流风暴的雷达回波特征;新一代天气雷达产品第一章 我国新一代天气雷达原理一、了解新一代天气雷达的三个组成部分和功能新一代天气雷达系统由三个主要部分构成:雷达数据采集子系统(RDA )、雷达产品生成子系统(RPG )、主用户处理器(PUP )。
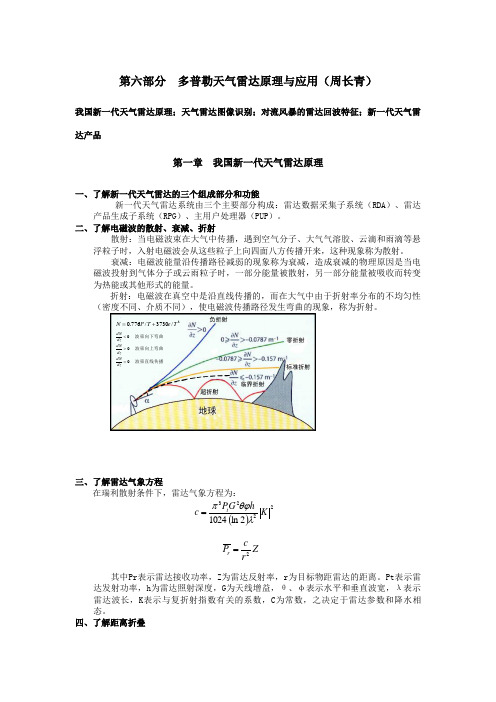
二、了解电磁波的散射、衰减、折射散射:当电磁波束在大气中传播,遇到空气分子、大气气溶胶、云滴和雨滴等悬浮粒子时,入射电磁波会从这些粒子上向四面八方传播开来,这种现象称为散射。
衰减:电磁波能量沿传播路径减弱的现象称为衰减,造成衰减的物理原因是当电磁波投射到气体分子或云雨粒子时,一部分能量被散射,另一部分能量被吸收而转变为热能或其他形式的能量。
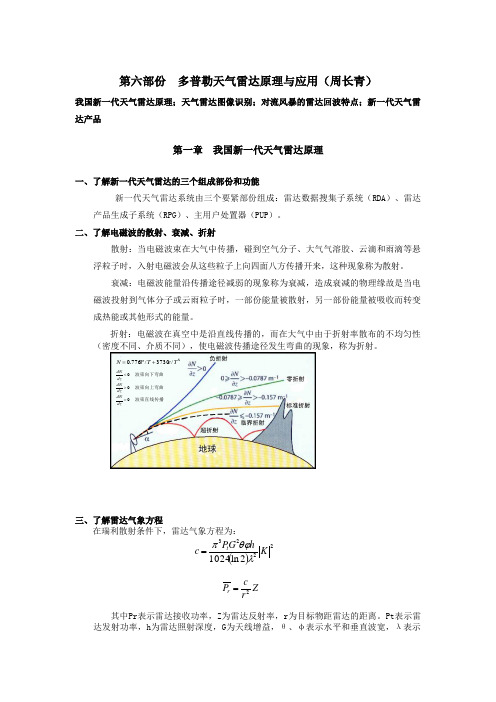
折射:电磁波在真空中是沿直线传播的,而在大气中由于折射率分布的不均匀性(密度不同、介质不同),使电磁波传播路径发生弯曲的现象,称为折射。
2/3730/776.0T e T P N +=波束直线传播波束向上弯曲波束向下弯曲000=><dz dN dzdN dzdN三、了解雷达气象方程 在瑞利散射条件下,雷达气象方程为:()22232ln 1024K h G P c t λθϕπ=Z r c P r 2=其中Pr 表示雷达接收功率,Z 为雷达反射率,r 为目标物距雷达的距离。
Pt 表示雷达发射功率,h 为雷达照射深度,G 为天线增益,θ、φ表示水平和垂直波宽,λ表示雷达波长,K 表示与复折射指数有关的系数,C 为常数,之决定于雷达参数和降水相态。
四、了解距离折叠最大不模糊距离:最大不模糊距离是指一个发射脉冲在下一个发射脉冲发出前能向前走并返回雷达的最长距离,Rmax=0.5c/PRF, c 为光速,PRF 为脉冲重复频率。
距离折叠是指雷达对雷达回波位置的一种辨认错误。
当距离折叠发生时,雷达所显示的回波位置的方位角是正确的,但距离是错误的(但是可预计它的正确位置)。
多普勒天气雷达原理与应用雷达探测算法
1)雷达波束阻碍
第一个质量控制步骤是纠正雷达波束的物理阻碍, 否则将导致对降水的过低估计。
如果对每个体积扫,雷达波束的阻碍低于60%,预置 的dBZ值被添加到被部分阻碍的距离库中。
如果超过60%的波束被阻碍,那么采取下列二种步骤之一:如果阻碍 物的方位伸展是2或更小,则在相应仰角紧挨阻碍物的其它距离库上 的平均值被指定为被阻碍物所阻碍的样本体积的距离库的值。如果阻 碍物的方位伸展大于2,则不做修正,对那个扇面,将使用邻接的的 较高仰角上的值。
第二类阈值确定算法的处理方式:PDF使用另一 组反射率因子强度和面积阈值(称作小雨阈值或第二类 阈值)来确定PPS的处理方式。它们比第一类阈值小, 对应PPS算法中能够分辨的降水强度的下限。如果第二 类阈值被超过,则不论目前的扫描模态是降水还是晴空, PDF将指示PPS算法从一个初始的零值场开始累加降水。 如果第二类阈值不被超过,则对应于没有降水,PPS将 以一个简化的方式运行以大大减少计算机处理时间。
双扫描最大化(bi-scan maximization):超 过50km(27nm)时,此技术选择最低2个仰角的较大 反射率因子值(除非最低仰角在倾斜测试中被丢弃)。 这主要是弥补波束障碍造成的对降水的过低估计,但同 时带来亮带污染的问题。自96年起,双扫描最大化被取 消。
分区混合扫描(sectorized hybrid scan): 分区混合扫描是缺省混合扫描和波束障碍要求所定义的 较高高度的联合。其结果对每个雷达站形成一个图形化 的分区混合扫描查询表,如下图所示。
③波束部分充塞: 波束部分充塞一般对距离雷达较远的气 象目标是个问题。WSR-88D的波束宽度是1。在距雷达100 海里远处,1宽的波束是近似2海里尺度的截面。雷达必须 做的假定之一就是所有的目标完全充满波束,因为它没有别 的确定方法。因此,在这个距离上比波束窄的目标物会显示 得比真实情况大。来自小目标物的能量被平均到整个宽的波 束上,结果是低估了降水量(整个区域范围是高估的)。 ④湿的天线罩: 如果天线罩被大雨或部分冻雨弄湿,雷达 会低估较远处目标物的降水率,因为波束能量在接近雷达时 被消弱。目标物的较少返回能量就意味着较小的反射率因子 和降水率。 ⑤不正确的硬件定标: 不正确的硬件定标会影响降水估计 的准确性。WSR-88D对每一次体积扫描进行自动标校,所 以能得到更准确的反射率因子,因而得到较准确的降水估计。
天气雷达的基本工作原理和参数-168页文档资料
常规天气雷达仅能提供反射率 因子资料。多普勒天气雷达将提供 两种附加的基本资料,径向速度和 速度谱宽,它们将增强对强风暴的 探测能力,也能改进对中尺度和天 气尺度系统的预报。
体扫模式 (VCP:Volume Cover Pattern) 扫描方式确定一次体积扫中使用多少个仰角,
而具体是哪些仰角则由体扫模式来规定。WSR-88D 可有20个不同的VCP,目前只定义了其中的4个: VCP11 -- VCP11(scan strategy #1,version 1) 规定5分钟内对14个具体仰角的扫描方式。 VCP21 -- VCP21(scan strategy #2,version 1) 规定6分钟内对9个具体仰角的扫描方式。 VCP31 --- VCP31 (scan strategy #3,version 1)规定10分钟内对5个具体仰角的扫描方式。 VCP32 --- VCP32(scan strategy #3,version 2)确定的10分钟完成的5个具体仰角与VCP31相同。 不同之处在于VCP31使用长雷达脉冲而VCP32使用 短脉冲。 WSR-98D未定义VCP32。
自相干多普勒天气雷达结构框图
全相干多普勒天气雷达结构框图
fo 发射脉冲的载频 fd 多普勒频率
发射频率 Vs 多普勒频移
发射频率 多普勒频移
中国新一代天气雷达系统简介
• 1、雷达数据采集系统(RDA) • 2、雷达产品生成子系统(RPG) • 3、主用户处理器子系统(PUP)
多普勒天气雷达:原理、应用与收获总结
多普勒天气雷达:原理、应用与收获总结以下是多普勒天气雷达原理与应用课程的总结:1.雷达基本原理与组成雷达是一种利用无线电波探测目标的电子设备。
它通过发射电磁波,并接收目标反射回来的电磁波,根据反射回来的电磁波的特性,推断出目标的位置、速度、形状等信息。
雷达主要由发射机、接收机、天线和显示器等组成。
发射机产生高频电磁波,并通过天线向空间发射。
当电磁波遇到目标时,它会被反射回来并被天线接收。
接收机接收到反射回来的电磁波后,对其进行处理和分析,以推断出目标的位置、速度、形状等信息。
2.多普勒天气雷达原理多普勒天气雷达是一种专门用于探测天气目标的雷达。
它利用多普勒效应原理,测量目标的速度和方向。
当雷达发射的电磁波遇到运动目标时,反射回来的电磁波的频率会发生变化。
多普勒天气雷达通过测量这种频率变化,可以推断出目标的速度和方向。
同时,根据反射回来的电磁波的振幅和相位等信息,还可以推断出目标的形状和大小。
3.多普勒天气雷达的应用多普勒天气雷达在气象领域有着广泛的应用。
它主要用于探测台风、暴雨、冰雹等恶劣天气,为气象预报和灾害预警提供重要依据。
此外,多普勒天气雷达还可以用于空气质量监测、气候变化研究、航空航天等领域。
4.课程收获与总结通过学习多普勒天气雷达原理与应用课程,我们了解了雷达的基本原理和组成,以及多普勒天气雷达的工作原理和应用。
我们学会了如何利用雷达数据分析和推断天气信息,并掌握了雷达在气象领域中的应用方法和技巧。
在本课程中,我们学习了很多有用的知识和技能,包括:雷达方程和散射截面、电磁波的传播特性、多普勒频移和速度估计、气象目标的识别和处理等。
这些知识和技能不仅可以帮助我们更好地理解雷达的工作原理和应用,还可以为我们的后续学习和工作打下坚实的基础。
总之,学习多普勒天气雷达原理与应用课程,不仅让我们深入了解了雷达的工作原理和应用,还提高了我们的数据处理和分析能力,为我们的后续学习和工作打下了坚实的基础。
多普勒雷达的应用原理

多普勒雷达的应用原理概述多普勒雷达是一种基于多普勒效应的雷达技术,它通过测量目标的运动速度来实现目标检测和速度测量。
多普勒雷达在军事、气象、交通等领域有着广泛的应用。
本文将介绍多普勒雷达的应用原理及其工作原理。
多普勒效应多普勒效应是指当光源与观察者之间有相对运动时,光的频率将发生变化。
这个现象也适用于雷达波。
当雷达波与运动的目标相互作用时,波的频率将发生变化,这一现象就被称为多普勒效应。
多普勒雷达的工作原理多普勒雷达主要通过测量电磁波的频率变化来获得目标的速度信息。
其工作原理可以分为两个主要步骤:发射和接收。
发射多普勒雷达会向目标发射一束电磁波,这个电磁波可以是微波或者射频信号。
发射的波束通常是一个连续的信号,而不是脉冲信号。
这是因为连续的信号可以提供更长的目标观测时间,从而获得更精确的速度测量结果。
接收目标接收到雷达发射的电磁波后,会对波进行回波。
当目标和雷达之间有相对运动时,回波的频率将发生变化。
多普勒雷达通过测量回波的频率变化来计算目标的速度。
信号处理与结果显示接收到回波后,多普勒雷达会将信号进行处理,通常会使用FFT(快速傅里叶变换)来分析波的频谱。
通过分析频谱,可以确定回波的频率变化,从而计算出目标的速度信息。
最后,多普勒雷达将速度信息以数字或图形的形式展示出来。
多普勒雷达的应用交通领域多普勒雷达在交通领域有着广泛的应用。
比如,在交通监控系统中,多普勒雷达可以用于测量车辆的速度和运动方向,从而实现交通流量统计、超速检测等功能。
此外,多普勒雷达还可以应用于自动驾驶系统中,帮助车辆实现定位和避障功能。
气象领域多普勒雷达在气象领域也有着重要的应用。
气象雷达可以利用多普勒效应测量云层中的降水速度和方向。
通过分析多普勒雷达的测量结果,可以预测暴雨、龙卷风等极端天气的发生。
军事领域多普勒雷达在军事领域有着广泛的应用。
它可以用于目标检测与识别、导弹预警系统等方面。
多普勒雷达可以检测到高速运动的目标,从而对敌方的机动部队进行监测和跟踪。
多普勒雷达探测原理
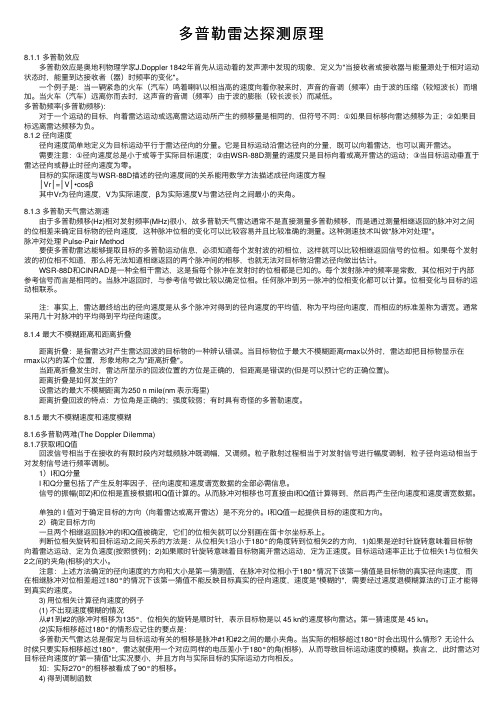
多普勒雷达探测原理8.1.1 多普勒效应多普勒效应是奥地利物理学家J.Doppler 1842年⾸先从运动着的发声源中发现的现象,定义为"当接收者或接收器与能量源处于相对运动状态时,能量到达接收者(器)时频率的变化"。
⼀个例⼦是:当⼀辆紧急的⽕车(汽车)鸣着喇叭以相当⾼的速度向着你驶来时,声⾳的⾳调(频率)由于波的压缩(较短波长)⽽增加。
当⽕车(汽车)远离你⽽去时,这声⾳的⾳调(频率)由于波的膨胀(较长波长)⽽减低。
多普勒频率(多普勒频移):对于⼀个运动的⽬标,向着雷达运动或远离雷达运动所产⽣的频移量是相同的,但符号不同:①如果⽬标移向雷达频移为正;②如果⽬标远离雷达频移为负。
8.1.2 径向速度径向速度简单地定义为⽬标运动平⾏于雷达径向的分量。
它是⽬标运动沿雷达径向的分量,既可以向着雷达,也可以离开雷达。
需要注意:①径向速度总是⼩于或等于实际⽬标速度;②由WSR-88D测量的速度只是⽬标向着或离开雷达的运动;③当⽬标运动垂直于雷达径向或静⽌时径向速度为零。
⽬标的实际速度与WSR-88D描述的径向速度间的关系能⽤数学⽅法描述成径向速度⽅程│Vr│=│V│•cosβ其中Vr为径向速度,V为实际速度,β为实际速度V与雷达径向之间最⼩的夹⾓。
8.1.3 多普勒天⽓雷达测速由于多普勒频移(Hz)相对发射频率(MHz)很⼩,故多普勒天⽓雷达通常不是直接测量多普勒频移,⽽是通过测量相继返回的脉冲对之间的位相差来确定⽬标物的径向速度,这种脉冲位相的变化可以⽐较容易并且⽐较准确的测量。
这种测速技术叫做"脉冲对处理"。
脉冲对处理 Pulse-Pair Method要使多普勒雷达能够提取⽬标的多普勒运动信息,必须知道每个发射波的初相位,这样就可以⽐较相继返回信号的位相。
如果每个发射波的初位相不知道,那么将⽆法知道相继返回的两个脉冲间的相移,也就⽆法对⽬标物沿雷达径向做出估计。
雷达气象学之第三章(多普勒天气雷达探测原理和方法)

2、脉冲对处理法(PPP)
在一定假设条件下对每一个距离库内的连 续两个取样值作成对处理.从而获得平均 多普勒频率和频谱宽度。此法优点在于能 实时处理.并且有一定精度,但它不能得 到频率谱。
3、相干记忆滤波器(CMF)处理法
此法只需要一个线路,在不设置距离库的 情况下同时对雷达探测范围内各个距离上 作粗略的谱分析,并能用如PSI(平面切变 线是其)等直接显示出来。但它精度不高;
垂 直 风 廓 线
补充风符号
1.风向杆 表示风的 来向。 2.风羽每 条代表风 速4米/秒, 半条代表2 米/秒,三 角旗代表 20米/秒。
谱 宽
反 射 率
三、影响速度谱宽的气象因子
• 多普勒速度谱宽表征着有效照射体内不同 大小的多普勒速度偏离其平均值的程度, 实际上它是由散射粒子具有不同的径向速 度所引起的。对气象目标物而言,影响速 度谱宽的主要因子有四个:
• 显然,雷达有效照射体中粒子直径的差别 越大,由此造成的多普勒速度谱越宽。
• 因此速度的谱宽实际上也取决于降水粒子 的谱分布。
• 当雷达水平探测时,粒子的下落末速度在 雷达波轴上的径向分量为零,所以它对多 普勒速度谱宽没有任何影响。
• 而当雷达垂直指向探测时,粒子下落末速 度即为径向速度,故由此造成的谱曾宽作 用最大。
• 在实际工作中需要了解的是有效照射体内
平均的多普勒速度和速度谱宽度,根据以
上关系式,并注意到 f 2v 关系式,则平均
多普勒速度
v
,和速度谱方差
2 v
分别为:
v 1 v v dv
Pr
2 v
1 Pr
vv
2
v dv
径向速度谱密度、平均径向速度、径向速度 谱宽三者的关系示意图
雷达气象学原理多普勒天气雷达
多普勒天气雷达除此之外,还可利用 降水回波频率与发射频率之间变化的信 息来测定降水粒子的径向速度,并通过 此推断风速分布,垂直气流速度,大气 湍流,降水粒子谱分布,降水中特别是 强对流降水中风场结构特征。
以前,用常规天气雷达进行的天气预报 仅仅使用反射率因子资料。多普勒天气雷达 将提供两种附加的基本资料,径向速度和速 度谱宽,它们将增强对强风暴的探测能力, 也能改进对中尺度和天气尺度系统的预报。
多普勒频率与径向速度的关系
假设多普勒雷达发射脉冲的工作频率为f0,目标与雷达的距
离为r,则雷达波发往目标到返回天线所经过的距离为2r。这 个距离用波长来度量,相当 个波长;用弧度来衡量相当于 个弧度。若所发射的电磁波在天线处的位相为 ,那么电磁波 被散射回到天线时的相位应是
位相的时间变化率
由于目标物的径向运动引起 的雷达回波信号的频率变化,它 就是多普频移或多普勒频率。
多普勒雷达是通过直接测量多普勒 频率来得到径向速度的吗?
4.2 多普勒雷达径向速度探测方法
Pulse-Pair Method 脉冲对方法
取两个连续的脉冲然 后测量接收脉冲的相位, 这种脉冲对位相变化可以 比较容易并且比较准确地 测量
DΦ/dt 实际上就是角 速度 = w = 2πfd
假定当第一个脉冲遇到目标物时,该目标物距雷达的距离为r,则该目标物 产生的回波到达雷达时的位相为:
2、平均多普勒频移及频谱宽度
3、平均多普勒速度和速度谱宽度
注意:脉冲对方法并没有从回波信号中提取频谱或功率谱,从而 不能按以上公式计算和,而是直接对回波信号作简便计算求得。
(8.43)
影响速度谱宽的气象因子
谱宽表征着有效照射体内不同大小的多普勒速度偏离其平 均值的程度。谱宽可以用做速度估计质量控制的工具:当谱宽 增加,速度估计的可靠性就减小。对气象目标物而言,影响谱 宽的主要因子有四个:
6、多普勒天气雷达原理与应用
6、多普勒天气雷达原理与应用第六部分多普勒天气雷达原理与应用(周长青)我国新一代天气雷达原理;天气雷达图像识别;对流风暴的雷达回波特征;新一代天气雷达产品第一章我国新一代天气雷达原理一、了解新一代天气雷达的三个组成部分和功能新一代天气雷达系统由三个主要部分构成:雷达数据采集子系统(RDA)、雷达产品生成子系统(RPG)、主用户处理器(PUP)。
二、了解电磁波的散射、衰减、折射散射:当电磁波束在大气中传播,遇到空气分子、大气气溶胶、云滴和雨滴等悬浮粒子时,入射电磁波会从这些粒子上向四面八方传播开来,这种现象称为散射。
衰减:电磁波能量沿传播路径减弱的现象称为衰减,造成衰减的物理原因是当电磁波投射到气体分子或云雨粒子时,一部分能量被散射,另一部分能量被吸收而转变为热能或其他形式的能量。
折射:电磁波在真空中是沿直线传播的,而在大气中由于折射率分布的不均匀性(密度不同、介质不同),使电磁波传播路径发生弯曲的现象,称为折射。
三、了解雷达气象方程在瑞利散射条件下,雷达气象方程为:其中Pr表示雷达接收功率,Z为雷达反射率,r为目标物距雷达的距离。
Pt表示雷达发射功率,h为雷达照射深度,G为天线增益,θ、φ表示水平和垂直波宽,λ表示雷达波长,K表示与复折射指数有关的系数,C为常数,之决定于雷达参数和降水相态。
四、了解距离折叠最大不模糊距离:最大不模糊距离是指一个发射脉冲在下一个发射脉冲发出前能向前走并返回雷达的最长距离,Rmax=0.5c/PRF, c为光速,PRF为脉冲重复频率。
距离折叠是指雷达对雷达回波位置的一种辨认错误。
当距离折叠发生时,雷达所显示的回波位置的方位角是正确的,但距离是错误的(但是可预计它的正确位置)。
当目标位于最大不模糊距离(Rmax)以外时,会发生距离折叠。
换句话说,当目标物位于Rmax之外时,雷达却把目标物显示在Rmax以内的某个位置,我们称之为‘距离折叠’。
五、理解雷达探测原理。
反射率因子Z值的大小,反映了气象目标内部降水粒子的尺度和数密度,反射率越大,说明单位体积中,降水粒子的尺度大或数量多,亦即反映了气象目标强度大。
多普勒天气雷达原理与应用
第六部份 多普勒天气雷达原理与应用(周长青)我国新一代天气雷达原理;天气雷达图像识别;对流风暴的雷达回波特点;新一代天气雷达产品第一章 我国新一代天气雷达原理一、了解新一代天气雷达的三个组成部份和功能新一代天气雷达系统由三个要紧部份组成:雷达数据搜集子系统(RDA )、雷达产品生成子系统(RPG )、主用户处置器(PUP )。
二、了解电磁波的散射、衰减、折射散射:当电磁波束在大气中传播,碰到空气分子、大气气溶胶、云滴和雨滴等悬浮粒子时,入射电磁波会从这些粒子上向四面八方传播开来,这种现象称为散射。
衰减:电磁波能量沿传播途径减弱的现象称为衰减,造成衰减的物理缘故是当电磁波投射到气体分子或云雨粒子时,一部份能量被散射,另一部份能量被吸收而转变成热能或其他形式的能量。
折射:电磁波在真空中是沿直线传播的,而在大气中由于折射率散布的不均匀性(密度不同、介质不同),使电磁波传播途径发生弯曲的现象,称为折射。
2/3730/776.0T e T P N +=波束直线传播波束向上弯曲波束向下弯曲000=><dz dN dzdN dzdN三、了解雷达气象方程其中Pr 表示雷达接收功率,Z 为雷达反射率,r 为目标物距雷达的距离。
Pt 表示雷达发射功率,h 为雷达照射深度,G 为天线增益,θ、φ表示水平和垂直波宽,λ表示雷达波长,K 表示与复折射指数有关的系数,C 为常数,之决定于雷达参数和降水相态。
四、了解距离折叠最大不模糊距离:最大不模糊距离是指一个发射脉冲在下一个发射脉冲发出前能向前走并返回雷达的最长距离,Rmax=PRF, c 为光速,PRF 为脉冲重复频率。
距离折叠是指雷达对雷达回波位置的一种识别错误。
当距离折叠发生时,雷达所显示的回波位置的方位角是正确的,但距离是错误的(可是可估量它的正确位置)。
当目标位于最大不模糊距离(Rmax )之外时,会发生距离折叠。
换句话说,当目标物位于Rmax 之外时,雷达却把目标物显示在Rmax 之内的某个位置,咱们称之为‘距离折叠’。
多普勒天气雷达PPT课件

波长11.3cm 直径5.7m,2.2m 增益38dB 功率1MW
21
中国新一代天气雷达
.
22
3、雷达回波形成的机制
一是降水粒子的后向散射形成的。 二是由于晴空大气折射指数不均匀产生 的后向“散射”或内反射而形成的。
.
23
4、雷达气象方程
Pபைடு நூலகம் 1Pt0G22l4n2h212R12
.
24
.
25
国内独立研制sc波段移动型cinrad产品型号分为两类八种型号中美合资生产sa波段增强型sb波段标准型ca波段增强型cb181999双偏振天气雷达实现对降水进行分类与识别双波长天气雷达推测被测粒子的大小多参数天气雷达提供云及降水物的尺寸相态和类型等信息多基地天气雷达能测出诸如风场的三维矢量降雨粒子的垂直速度等信息机载天气雷达雷达分辨力精度和灵敏度好相控阵天气雷达优点很多是天气雷达的发展方向20波长32cm直径15m增益38db功率75kw波长32cm直径55m11m功率180kw波长56cm直径37m增益38db功率250kw21波长107cm直径4m增益36db功率600kw波长113cm直径57m22m增益38db功率1mw22中国新一代天气雷达23一是降水粒子的后向散射形成的
.
15
天气雷达发展历史
一般,在沿海地区安装 S波段 雷达,内陆地区安装 C波段雷达, 这样可以减少衰减,成本也较小。 S波段雷达与 C波段雷达价格相差1 倍。
.
16
中国气象局颁发了新一代多普勒天气雷达
统一型号命名规定:
CINRAD产品型号,分为两类八种型号
中美合资生产
SA — S波段增强型 SB — S波段标准型
波段雷达建设。
.
6多普勒天气雷达原理与应用

6多普勒天气雷达原理与应用多普勒天气雷达是一种利用多普勒效应来探测降水、风速和风向等气象参数的雷达,广泛应用于气象预报、水资源管理、防灾减灾等领域。
下面将从多普勒天气雷达的原理和应用两个方面进行详细介绍。
一、多普勒天气雷达原理:多普勒天气雷达利用物体回波的多普勒频移来测量物体的运动状态。
其原理可以通过以下几个步骤来理解:1.信号发射与接收:雷达通过天线向大气中发射脉冲信号。
脉冲信号是一种特殊的波形,其特征是能够精确测量反射信号的时延。
雷达波束探测的范围称为体积样积分区(VCP)。
2.对流层的多次散射:当雷达脉冲信号遇到大气中的物质(如雨滴、冰晶等)时,部分能量会被这些物质散射反射回来,形成回波。
3.多普勒频移的测量:回波信号中包含了大气物质运动的信息。
相对于静止的物体而言,当物体以一定速度向雷达或远离雷达运动时,回波信号的频率会发生变化,这就是多普勒频移效应。
4.频谱分析与信号处理:雷达对回波信号进行频谱分析,可以得到回波信号频率的分布情况。
通过计算信号的频移量,可以得到大气物体沿径向的速度和方向。
二、多普勒天气雷达的应用:多普勒天气雷达主要应用于气象预测、水资源管理和防灾减灾等领域,具有以下几个方面的应用:1.气象预报:多普勒天气雷达可以精确测量降水的强度、区域分布和降雨类型(如雨、雪、冰雹等),有助于提高天气预报的准确性。
通过观测和分析雷达回波,可以及时预警并预测强降水、洪水、暴风雨等极端天气事件,为防范和减轻灾害提供重要数据支持。
2.水资源管理:多普勒天气雷达能够实时监测和测量降水的强度和分布,在水资源管理中起到重要作用。
通过对降水数据的分析,可以为城市供水、水库调度、灌溉农业等方面的决策提供准确的水资源量和雨量预测信息。
3.风速与风向测量:多普勒天气雷达还可以测量大气中的风速和风向。
利用雷达的多普勒频移原理,可以从回波中获取风场流场的信息,包括垂直风速的分布、风向的变化等,为气象、航空、海洋等领域提供有关风的数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
Wilson and Mueller 1993
当边界与一个已经存在的雷暴相遇后,往往伴随着 雷暴的合并与加强
右图显示雷暴被阵 风锋(红线)赶上 后出现合并和加强 (增长)。
影响雷暴演化的边界特征
• 相对边界单体速度 (Ub) Ub 是一个单体离开边界的速度. 当其值 >~4 m/s 雷暴会离边界越来越远 ,可能消散。对于更小的单体速度值, 雷暴将保持在边界附近并可能继续存在 下去。
雷暴生成过程频繁地发生在边界层辐合线附近
雷暴生成位置
图中为科罗拉多州一个夏天 的统计,80% 的雷暴生成在 边界层辐合线附近。 边界附近的区域称为抬升区。
(Purdom 1973, 1976 1982; Wilson and Schreiber 1986)
抬升区是雷暴最容易生成和增长的区域
(Wilson and Mueller 1993)
相交的边界常常触发强雷暴
相交的边界常常造成新雷暴的生成 和已经存在雷暴在尺度和强度上的 明显增加。
右边的垂直剖面显示两条边界 相碰后垂直速度的大的增加 (3m/s to 12m/s)
(Mahoney 1988)
当边界与积云相碰时,雷暴往往紧接着生成
右边的雷达图象表明当 一条东西走向的阵风锋向 南移动与南北走向的水平 对流卷相遇时,沿着对流 卷的积云成长为雷暴。
安徽2002年8月24日飑线 TITAN 3 0分钟预报与实况
安徽2004年7月7日强对流 TITAN 3 0分钟预报与实况
安徽2004年7月7日强对流 TITAN 3 0分钟预报与实况
安徽2004年7月7日强对流 TITAN 3 0分钟预报与实况
安徽2004年7月7日强对流 TITAN 3 0分钟预报与实况
安徽2004年7月7日强对流 TITAN 3 0分钟预报与实况
TREC
TREC 是Tracking of Radar Echo with Correlations 的缩 写,既“利用相关跟踪雷达回波”。 1978年由Rinehart和Garvey提出这项技术,用来反演雷 达回波区的气流流场。 该项技术利用交叉相关方法跟踪雷达某一个仰角扫描构 成的锥面上某一个二维回波型。即初始的算法是在由某 一仰角扫描构成的2维圆锥面上进行回波的跟踪。后来, 将该技术应用于直角坐标情况,考虑在某一等高面上的 二维直角坐标系中进行回波跟踪。首先需要将雷达体扫 资料内插到某一等高面(如2.5km)上的直角坐标系中。 在直角坐标系中的TREC称为CTREC。
雷暴追踪
假设T1和T2是相邻的两个雷达体扫资料时间
追踪思路:
1. 宁短不长(考虑 到体扫间隔为56分钟) 2. 特征相似(尺寸 和形状等)
3. 设置雷暴移动速 度上限
将雷暴路径的确定作为一个最优化问题来处理
雷暴合并与分裂的处理
雷暴合并:t1时刻的 雷暴多余t2时刻雷暴 数,或者有雷暴消失, 或者有雷暴合并。如 果t1时刻的2个以上雷 暴质心的预报位置在 t2时刻识别的某个雷 暴范围内,可以判断 雷暴合并。
Auto-Nowcaster
预报雷暴生成和界对雷暴生成演化的影响 • 稳定度对雷暴生成演化的影响
雷暴生命史及其演化特征
Single cell storms live < 30 min Single cell storms live < 30 min Multi-cell storm systems live > 30 min
14 雷暴和降水的临近预报系统
• TITAN • TREC • Auto-Nowcaster
跟踪和外推算法
雷暴或降水的临近预报系统的基础是跟踪和外 推。主要分为两种类型: • 单体质心跟踪和外推: 将雷暴或降水单元视为三维 单体加以识别、跟踪和外推。典型的例子有WSR-88D 和WDSS中的风暴单体识别与跟踪、以及TITAN等, 下面我们会对TITAN重点进行介绍; • 区域跟踪和外推:对反射率因子超过某一阈值的二 维区域进行跟踪和外推。典型的例子有TREC等,我 们下面给以重点介绍。
雷暴分裂:对于在t1时 刻所有的风暴,预报它 们在t2时刻的椭圆投影 的位置、取向和尺寸, 然后根据t2时刻识别的 所有雷暴判断哪些是新 的路径,即没有历史的 雷暴。如果这些没有历 史的雷暴的质心位于某 一个t1时刻雷暴的预报 的在t2时刻的投影椭圆 的区域范围内,则确认 发生了雷暴分裂。
雷暴移动的预报
(Henry 1993; Battan 1953; Foote and Mohr 1979)
单个雷暴单体和复合对流系统的演变
SIZE
1
2
3 TIME (hr)
4
5
雷暴尺寸和强度的变率通常较大.
雷达可以提供雷暴运动、尺寸和强度等的时间趋势
超出15分钟,这些参数本身 只有有限的预报价值,由于 造成雷暴演变的物理过程并 不一定在雷暴的演变史中能 够捕捉到,它们常常是由大 气边界层中的辐合和稳定度 等因素所驱动的。
安徽2004年7月7日强对流 TITAN 3 0分钟预报与实况
安徽2004年7月7日强对流 TITAN 3 0分钟预报与实况
安徽2004年7月7日强对流 TITAN 3 0分钟预报与实况
安徽2004年7月7日强对流 TITAN 3 0分钟预报与实况
安徽2004年7月7日强对流 TITAN 3 0分钟预报与实况
定点定时的雷暴预报的精度
Adapted from Browning (1980), Doswell (1986) and Austin et al. (1987)
边界对雷暴的影响
边界层辐合线(边界)的概念:锋面、 干线、雷暴出流边界(阵风锋)、海陆 风辐合线等。
边界层辐合线(边界)影响雷暴的演化,这些边界可以通过卫 星云图和雷达图象观察到:
安徽2004年7月7日强对流 CTREC 3 0分钟预报与实况
绿色实线为12dbz的反射率因子实况的轮廓线。
安徽2004年7月7日强对流 CTREC 3 0分钟预报与实况
绿色实线为12dbz的反射率因子实况的轮廓线。
安徽2004年7月7日强对流 CTREC 3 0分钟预报与实况
绿色实线为12dbz的反射率因子实况的轮廓线。
雷暴定义:反射率因子TZ ≥ 35dBZ;体积TV ≥ 50km3
雷暴识别
考虑二维格点,先识 别 x 方向,再识别 y 方 向, 再拓展到三维 识别z方向(之上或 者之下)
阴影区:反射率≥ TZ
雷暴特征分析
反射率因子权重 质心(雷暴中心)
体积
雷暴投影到水平 面上的面积大小和形 状(最佳适应形状是 多边形和椭圆)
安徽2004年7月7日强对流 CTREC 3 0分钟预报与实况
绿色实线为12dbz的反射率因子实况的轮廓线。
安徽2004年7月7日强对流 CTREC 3 0分钟预报与实况
绿色实线为12dbz的反射率因子实况的轮廓线。
安徽2004年7月7日强对流 CTREC 3 0分钟预报与实况
绿色实线为12dbz的反射率因子实况的轮廓线。
CTREC中的跟踪方法
CTREC使用一定时间间隔内的雷达资料,将反射率因子 场分成若干个大小相当的“区域”,每个“区域”包含 m×m个像素。将这些在上一时刻的“区域”分别与下一 时刻的各个“区域”作空间交叉相关,以找出此刻与上一 个时刻的特定区域相关系数最大的“区域”,从而来确定 整个回波的移动矢量,实现回波的跟踪。 “区域”尺寸的选择不宜太大也不宜太小,太大会导致回 波移动向量的分辨率太粗,“区域”太小则包含的数据点 太少,不足以产生稳定的相关系数。发现对于1km ×1km 的分辨率,m取值在3-7之间比较合适。
主要思路:对于较短的时间间隔,1)一个雷暴倾向于 沿着一条直线运动;2)风暴的增长和衰减遵循线性趋 势;3)会出现对上述线性行为的随机偏差。
根据演变历史加权线性拟合外推:预报量包括以反射 率因子为权重的雷暴质心、体积、和投影椭圆的参数。 最近,改用多边形(原来为椭圆)对雷暴的水平投影 的面积和形状进行表达。
Ub large
cell velocity
Boundary velocity
Ub near zero
cell velocity boundary velocity
(Moncrieff and Miller 1976, Weisman and Klemp 1986, Wilson and Megenhardt 1997)
1. 云图. 注意沿着Florida 东海 岸与海陆风相联系的 南北向积云线.
2. 雷达. 注意与一条边界相联系 的南北向晴空窄带回波。 箭头为地面测站观测的 风矢量。
雷暴在一个移动边界后面生成的例子
第一幅图显示径向速度图,可以识别一条辐合线。
随后显示的是反射率因子动画。 注意边界向东南移动时雷暴的 生成过程 。
TITAN
Thunderstorm Identification, Tracking, Analysis, and Nowcasting
雷暴识别、追踪、分析和临近预报
一个基于雷达观测的雷暴临近预报系统
最早版本完成于1986年,1990年代中期得到改进和完善
坐标系
算法采用三维直角坐标系统,由雷达体扫反射率因 子数据得到三维直角坐标系中的反射率因子数据。
(Tsonis and Austin 1981, Bellon and Austin 1978, Browning et al. 1982, Collier 1989)
绝大多数的雷暴的生命史较短,其大小和强度 变化较快,因此单凭外推进行预报通常是不充分的。 需要预报雷暴的生成、演变和消散。 只有在成熟的超级单体风暴和有组织飑线的情 况下,外推基本上是充分的
安徽2002年8月24日飑线 TITAN 3 0分钟预报与实况
安徽2002年8月24日飑线 TITAN 3 0分钟预报与实况