001 力士乐电液比例技术,67页
REXROTH力士乐电液换向阀选用要点与使用需知
REXROTH力士乐电液换向阀选用要点与使用需知REXROTH电液换向阀的先导控制方式及选用注意要点力士乐电液换向阀的先导油供油方式有内部供油和外部供油方式,简称为内控、外控方式。
对应的先导油回油方式也有内泄和外泄两种。
(1)外部油先导控制方式外部油控制方式是指供给先导电磁阀的油源是由另外一个控制油路系统供给,或在同一个液压系统中,通过一个分支管路作为控制油路供给。
前者可单独设置-台辅助液压泵作为控制油源使用;后者可通过减压阀等,从系统主油路中分出一支减压油路。
注意:外部控制形式由于电液换向阀阀芯换向的*小控制压力一般都设计得比较较小,多数在1MPa以下,因此控制油压力不必太高,可选用低压液压泵。
注意:它要增加一-套辅助控制系统。
(2} 内部油先导控制方式主油路系统的压力油进人电液换向阀进油路后,再分出一部分作为控制油,并通过阀体内部的孔道直接与上部先导阀的进油腔相沟通,特点是不需要辅助控制系统,省去控制油管,简化整个系统的布置。
注意:控制压力就是进.入该阀的主油路系统的油液压力,当系统工作压力较高时,这部分高压流量的损耗是应该加以考虑的,尤其是在电液换向阀使用较多,整个高压流量分配受到限制的情况下,更应该考虑这种控制方式所造成的能量损失。
注意:内部控制方式一般是在系统中电液动换向阀使用数目较少,而且在总的高压流里有剩余的情况下,为简化系统的布置而选择采用。
措施1:当采用内部油控制方式而主阀中位卸荷时,必须在回油管路上加设背压阀,使系统保待有一定的压力。
背.压力至少应大于电液动换向阀主阀的*小控制压力。
措施2:在电液换向阀的进油口P中装预压阀,它实际上是一个有较大开启压力的插人式单向阀,当电液换向阀处于中间位置时,油流先经过预压阀,然后经电液换向阀内流道由T口回油箱,从而在预压阀前建立所需的控制压力。
REXROTH电液换向阀采用内控形式时,是靠主阀P腔给导阀提供压力,当主阀阀芯中位机能会造成主阀P腔失压时,先导阀就失去了控制主阀换向的压力,该阀就不能工作。
德国力士乐比例阀的原理和分类有哪些

德国力士乐比例阀的原理和分类有哪些德国力士乐比例阀的原理和分类有哪些比例控制阀主要用於开回路控制(openloopcontrol)。
比例控制阀的输出量与输入信号成比例关系,且比例控制阀内电磁线圈所产生的磁力大小与电流成正比。
在传统型式的液压控制阀中,只能对液压进行定值控制,例如:压力阀在某个设定压力下作动,流量阀保持通过所设定的流量,方向阀对於液流方向通/断的切换。
因此这些控制阀组成的系统功能都受到一些限制,随著技术的进步,许多液压系统要求流量和压力能连续或按比例地随控制阀输入信号的改变而变化。
液压伺服系统虽能满足其要求,而且精度很高,但对於大部分的工业来说,他们并不要求系统有如此高的品质,而希望在保证一定控制性能的条件下,同时价格低廉,工作可靠,维护简单,所以比例控制阀就是在这种背景下发展起来的。
比例控制阀可分为压力控制阀,流量控制及方向控制阀三类。
压力控制阀:用比例电磁阀取代引导式溢流阀的手调装置便成为引导式比例溢流阀,其输出的液压压力由输入信号连续或按比例控制。
流量控制阀:用比例电磁阀取代节流阀或调速阀的手调装置而以输入信号控制节流阀或调速阀之节流口开度,可连续或按比例地控制其输出流量。
故节流口的开度便可由输入信号的电压大小决定。
方向控制阀:比例电磁阀取代方向阀的一般电磁阀构成直动式比例方向阀,其滑轴不但可以换位,而且换位的行程可以连续或按比例地变化,因而连通油口间的通油面积也可以连续或按比例地变化,所以比例方向控制阀不但能控制执行元件的运动方向外,还能控制其速度。
力士乐比例阀由直流比例电磁铁与液压阀两部分组成,比例阀实现连续控制的核心是采用了比例电磁铁,比例电磁铁种类繁多,但工作原理基本相同,它们都是根据比例阀的控制需要开发出来的。
REXROTH比例阀与普通液压元件相比,有如下特点:(1)电信号便于传递,能简单地实现远距离控制。
(2)能连续、按比例地控制液压系统的压力和流量,实现对执行机构的位置、速度、力量的控制,并能减少压力变换时的冲击。
电液比例技术6

3 n Ps FL / A1 ' P 1 1 n3
液压缸换向时压力突变值为:
无杆腔:
有杆腔:
2 nP (1 n ) ' s P 1 P 1 P 1 1 n3 2 P (1 n ) ' s P2 P2 P2 1 n3
7
电 液 比 例 技 术
阀与缸不完全匹配的情况
实例
电 液 比 例 技 术
系统压力选择
电 液 比 例 技 术
回路增益图
电 液 比 例 技 术
位置精度计算
Kx-位置反馈增益
电 液 比 例 技 术
位置精度计算
伺服阀反响回差产生的误差 反响回差误差一般取0.2%的额定信号 负载变化产生的误差 取负载变化FH=6000N
电 液 比 例 技 术
位置精度计算
KA =
KV×KC×KT×KD
电 液 比 例 技 术
79F2012B3-HR5 的主要参数: 主阀芯驱动轴直径 D=0.75”=1.905cm; 主阀芯位移 XR=0.09”=0.2286cm(Q=800 L/Min); LVDT 灵敏度 SL=0.42 1/cm. 先导阀主要参数: 额定流量 QR=26.5 L/ Min=441.67 cm3/S ;额定电流 IR=+/-40 mA (并联接线) 推荐最大环路增益 KL=590 1/s. 计算: KV=441.67•SQR(210/70)/40=19.12 cm3/ s/ Ma (此处假定先导控制压力为 210bar,如果实际使用中不是此数值,则要重新 按实际压力进行计算) KC=0.351 1/ cm2 (AV =2.85 cm2) 取 LVDT 初级激励电压为: VLP-P=8VP-P KT=SL • VLP-P =0.42X8=3.36 VP-P/cm. 取额定输入 ER=+/-2V= KT • KD • XR = 3.36 •KD •0.2286 可得激励/解调器解调增益 KD=2.6 VDC/ VP-P 由 KL=KA • KV •KC • KT •KD=590 1/S 可得伺服放大器增益 KA=10.1 Ma/V. 这是最大取值,一般为保证稳定性,实际伺服放大器增益要小于此数值. 取 KA=7 Ma/V.
电液比例技术

传统的液压控制方式是开关型控制,这是迄今为止用得最多 的一种控制方式。它通过电磁驱动或手动驱动来实现液压流体的 通、断和方向控制,从而实现被控对象的机械化和自动化。但是 这种方式无法实现对液流流量、压力连续地按比例地控制,同时 控制的速度比较低、精度差、换向时冲击比较大,因此在许多场 合下不宜采用。第二次世界大战期间,由于以飞机、火炮等军事 装备为对象的控制系统,要求快速响应、高精度等高性能指标, 在这个背景下迅速发展了电液伺服控制。这种控制方式可根据输
主讲人 张金涛
电液比例技术
1.4 电液比例控制系统的分类
按被控量是否被检测和反馈来分类,可分为开环比例控制和 闭环比例控制系统。目前的应用以开环控制为主,由于整体闭环比 例阀的性能与伺服阀无异,采用闭环控制的场合会越来越多。
按控制信号的形式来分类,可以分为模拟式控制和数字式控 制。后者又分为脉宽调制,脉码调制和脉数调制等。
入信号(如电流)的大小连续、按比例地改变液流的流量、压力和
方向,克服开关型控制的缺点,实现高性能的控制要求。 主讲人 张金涛
电液比例技术
1.1 电液比例技术的发展概况
60年代电液伺服控制日趋成熟 ,迅速向民用工业推广。但 是在向民用工业推广的过程中,液压伺服系统暴露出了它致命的 弱点:元件的制造精度要求很高,成本昂贵;对油污染十分敏感, 因此对系统的维护要求高;控制损失(阀压降)较大。因为一般工 业控制系统,它要求精度不那么高,响应也不需要那么快速,却 要求系统对油液污染不敏感,维护简单,成本低廉,于是人们就 想到如何发展廉价的伺服控制,这便导致研究和发展电液比例控 制技术。
主讲人 张金涛
电液比例技术
电液比例技术
中矿物油内混入的空气量可达10-20。但随着压力上升,一部分混入的 气体将溶解于液体中,不再对液体的有效弹性模量产生明显的影响。
比例控制放大器
一. 作用:
起功率放大及其它作用(死区补偿、颤振、缓冲、阀芯位移控制等)
起功率放大:
输入信号:0-10V; 0-10V(方向阀);0-20mA,0-20mA(电流抗干扰, 但获得不便)
⑥ 先导液桥是由液阻构成的 无源网络,需要由外部压 力供油。
液压半桥的基本类型
类 输入 输出 型 液阻 液阻
符号
A 可变 可变
B 固定 可变
C 可变 固定
相对出 增益 现率
5% 2
93% 1
2% 1
先导液桥中的液阻
液阻的功能
说A明、:桥路液阻 1、B、若固动定态液阻阻工尼作在零流量附近, C则 a、)工流动作量时压压,差反其增馈流益量很压小差;动而态如增图 D益、很限大。流故在用阻尼液阻时, E导 作、入 于稳稳 图压定a)位流(置量隔以可提使压高固)增定益液;阻工
表示
油液的压缩率(压缩系数):
1ห้องสมุดไป่ตู้
(V )
p V
弹性模量:E 1 V P V
ΔV V-ΔV
V
P+ΔP
P
5 4
得到静压封闭容腔压力基本公式
p E V V
3 2
1
液压系统压力容腔压力公式
P E VL V
液压系统压力区的划分
在压力伺服机构中,实际上出现的许多不稳定现象,都是由于 压力介质的压缩性所引起的。这种压缩性,表现为介质在一定温度下,压 力变化引起的密度变化。油源设计时,考虑到这一情况,按压力基本公式 进行如下的计算。
液压伺服和电液比例控制技术 ppt课件
液压伺服和电液比例控制技术
• 当阀进油口p处作用在锥阀上的液压力超过 弹簧力时,锥阀打开,油液通过阀口由出 油口T排出,这个阀的阀口开度是不影响 电磁推力的,但当通过阀口的流量变化时, 由于阀座上的小孔d处压差的改变以及稳态 液动力的变化等,被控制的油液压力依然 会有一些改变。
液压伺服和电液比例控制技术
• 优点:伺服阀控制精度高, 响应速度快,特别是电液 伺服系统易实现计算机控 制。
• 在工业自动化设备、航空、 航天、冶金和军事装备中 得到广泛应用。
• 缺点:伺服阀加工工艺复 杂,对油液污染敏感,成 本高,维护保养困难。
液压伺服和电液比例控制技术
二、电液伺服系统的应用
• 电液伺服系统通过电气传动方式,将电气 信号输入系统,来操纵有关的液压控制元 件动作,控制液压执行元件使其跟随输入 信号动作。其电液两部分之间都采用电液 伺服阀作为转换元件。
液压伺服和电液比例控制技术
• 近年来在国内外得到重视,发展较快,电 液比例控制的核心元件式电液比例阀,简 称比例阀。本节主要介绍常用的电液比例 阀及其应用。
液压伺服和电液比例控制技术
一.电液比例控制器
• 电液比例控制阀由常用的人工调节或开关控制的 液压阀加上电-机械比例转换装置构成。常用的 电-机械比例转换装置是有一定性能要求的电磁 铁,它能把电信号按比例地转换成力或位移,对 液压阀进行控制。
• 图8-6所示为直动式压力阀,它可以直接使 用,也可以用来作为先导阀以组成先导式 的比例溢流阀,比例减压阀和比例顺序阀 等元件。
液压伺服和电液比例控制技术
• ⒉电液比例换向阀 • 电液比例换向阀一般由电液比例减压阀和
液动换向阀组合而成,前者作为先导级,以 其出口压力来控制液动换向阀的正反向开 口量的大小,从而控制液流的方向和流量 的大小。
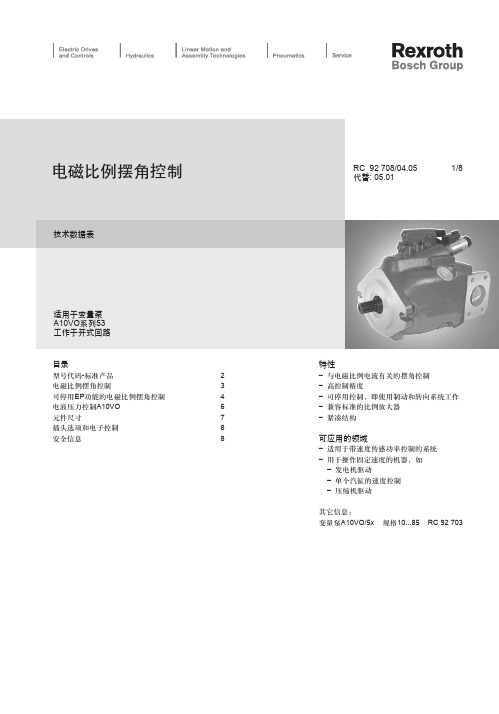
力士乐电液比例摆角控制
电磁比例摆角控制 | RC 92 708/04.05
ED
RC 92707
ED
EP.ED
相匹配(不超过)。
与所需的系统流量 ED
工作压力 [bar]
PWM
L L1
B
-
ED
250
140
0
I/ Imax 1
-
< 3 bar
n = 1500 rpm; tÖl = 50
qv max
L2
S
20 bar
14-22 bar
RC 92 708/04.05│电磁比例摆角控制
博世力士乐
/8
电磁比例摆角控制
技术数据表
适用于变量泵
A10VO系列53 工作于开式回路
目录
型号代码-标准产品
2
电磁比例摆角控制
3
可停用EP功能的电磁比例摆角控制
4
电液压力控制A10VO
6
元件尺寸
7
插头选项和电子控制
变量泵的详细元件尺寸和技术参数在主数据表中提供(在准备中)。 1) 将电磁铁旋转至所需的位置可选择插头的安装方向。旋转电磁铁后,必须以5+1 Nm的扭矩重新拧紧塑料螺钉。
/8 博世力士乐
P DEUTSCH DT 04-2P
IP 69K DT 06–2S–EP041
02601804
1
22
– A10VO – – –
/8 博世力士乐
EP
EK
EK...
EP...
EP EP
DFR
14 bar
Vg maxIres
EK...
3
PWM
Vg max
EK.DS
德国力士乐比例阀又称分配阀,是移动式机械液压系统最基
德国力士乐比例阀又称分配阀,是移动式机械液压系统最基本的元件之一,是能实现方向与流量调节的复合阀。
电液滑阀式比例多路阀是比较理想的电液转换控制元件,它不仅保留了手动多路阀的基本功能,还增加了位置电反馈的比例伺服操作和负载传感等先进的控制手段。
所以它是工程机械分配阀的更新换代产品。
出于制造成本的考虑和工程机械控制精度要求不高的特点,一般比例多路阀内不配置位移感应传感器,也不具有电子检测和纠错功能。
所以,阀芯位移量容易受负载变化引起的压力波动的影响,操作过程中要靠视觉观察来保证作业的完成。
在电控、遥控操作时更应注意外界干涉的影响。
近来,由于电子技术的发展,人们越来越多地采用内装的差动变压器(LDVT)等位移传感器构成阀芯位置移动的检测,实现阀芯位移闭环控制。
这种由电磁比例阀、位置反馈传感器、驱动放大器和其它电子电路组成的高度集成的比例阀,具有一定的校正功能,可以有效地克服一般比例阀的缺点,使控制精度得到较大提高。
REXROTH力士乐比例阀一般采用两端承压面积不等的差径活塞结构。
比例阀不工作时,差径活塞2在弹簧3的作用下处于上极限位置,此时阀门1保持开启,因而在输入控制压力P1与输出压力P2从零同步增长的初始阶段,总是P1等于P2。
但是压力P1的作用面积A1为π(D2-d2)/4,压力P2的作用面积A2为πD2/4,因而A2大于A1,故活塞上方液压作用力大于活塞下方液压作用力。
在P1、P2同步增长过程中,当活塞上、下两端液压作用之差超过弹簧3的预紧力时,活塞便开始下移。
当P1和P2增长到一定值PS时活塞2内腔中的阀座与阀门1接触,进油腔与出油腔即为隔绝,使比例阀进入平衡状态。
若进一步提高P1则活塞将回升,阀门再度开启,油液继续流入出油腔而使P2不断升高,但由于A2大于A1,P2尚未增长到新的P1值,活塞又下降到平衡位置。
在任一平衡状态下,差径活塞的力的平衡方程为:P2路A2=P1路A1+F(此处F为平衡状态下的弹簧力)。
电液比例控制

电液比例控制技术概述电液比例控制技术概述电液比例控制技术概述液压传动与控制技术作为动力传动与控制技术的重要组成部分,对工业和国防领域的技术进步和发展起到了很大的推动作用,是现代机械工程的基本要素和工程控制的关键技术之一。
其具有易于实现直线运动、功率质量之比大、动态响应快等优点[1] 。
随着现代科学技术与工业的发展,对液压传动系统的灵敏性、稳定性、可靠性和寿命提出了愈来愈高的要求。
电液比例控制系统具有抗干扰能力强、可靠性高、结构紧凑、价格低、与计算机连接方便、控制灵活、低速平稳性能好等诸多优点,在液压系统中的应用具有重要意义。
因此,将电液比例控制技术应用于液压传动系统中,不仅可以简化液压控制系统,还可以提高液压系统的控制水平,更好的满足工业要求。
科学技术的发展、工业发展步伐加快,以及日益严格的高自动化、节能、远距离传输和可持续发展的社会和工程需要,使得电气控制技术在液压系统中的应用日趋广泛。
可编程控制器(简称PLC 或PC)作为电气控制技术中的一项新技术,经过30 多年的发展,已形成完整的工业产品系列。
它以微处理器为核心,有机地将微型计算机技术、自动化技术及通信技术融为一体。
PLC 在比例液压系统中的应用,方便和简化了工业控制,提高了控制的自动化、集成化、一体化,符合工业发展的潮流。
习惯上,人们把使用比例控制组件(含比例阀、比例控制泵及比例放大器)的液压系统称为电液比例控制系统。
严格地说,比例控制是实现组件或系统的被控制量(输出)与控制量(输入或指令)之间线性关系的技术手段,依靠这一手段要保证输出量的大小按确定的比例随着输入量的变化而变化。
电液比例阀是以传统的工业用液压控制阀为基础,采用模拟式电气-机械转换装置将电信号转换为位移信号,连续地控制液压系统中工作介质的压力、方向或流量的一种液压组件。
电液比例阀工作时,阀内电气-机械转换装置根据输入的电压信号产生相应动作,使工作阀阀芯产生位移,阀口尺寸发生改变并以此完成与输入电压成比例的压力、流量输出。
简单电液比例控制在A4VSO上的应用

简单电液比例控制在A4VSO上的应用黄忠华【摘要】博世力士乐的A4VSO液压泵控制方式极其多样化,其中A4VSO的电控主要采用位移传感器电信号反馈加闭环控制控制精度高,但是成本也高.为了满足一些对控制精度要求相对低的用户,介绍在A4VSO中采用机械式反馈,弹簧力位置闭环的简单电液比例控制,分析其工作原理,建立AMESim仿真模型并与实验数据进行.【期刊名称】《流体传动与控制》【年(卷),期】2016(000)004【总页数】4页(P26-29)【关键词】简单电液比例控制;仿真;A4VSO【作者】黄忠华【作者单位】佛山市科达液压机械有限公司广东佛山 528313【正文语种】中文【中图分类】TM137.3液压泵是液压系统的动力元件,主要作用是将原动机(电动机、内燃机等)的机械能转变为液体压力能。
随着智能化发展,电比例控制使用越来越多,如振动压路机、摊铺机、挤压机、注塑机等,均采用了电比例控制的液压泵。
对于采用位移传感器反馈,闭环控制的电比例控制液压泵,控制原理为典型的阀控缸液压系统。
本文论述采用机械式反馈,弹簧位置力闭环控制的简单电液比例控制在A4VSO上的应用分析。
为了更好地论述简单电液比例(EP)控制,本文首先对其采用的弹簧反馈、位置力闭环控制原理进行分析。
如图1所示,该模型由一个二通插装阀和滑阀式先导级组成。
先导级由先导滑阀的阀口构成的两个可变液阻组成A型液压半桥,液桥输出控制对象为流量主阀芯上腔的压力p2。
1.1阀的工作原理当阀的输入电信号为零时,先导阀芯在反馈弹簧预压缩力的作用下,处于图所示位置,即先导阀进油口为较小的正开口(0.3 mm~0.4 mm),这是为了补偿系统的泄漏,使主阀上腔保持适当的压力,而回油口为零开口,主阀芯两端受力平衡,主阀芯处于关闭状态。
无论进油口压力ps有多高,均没有主流量从A口流向B口。
给电磁铁一个电信号,将输出一个电磁力推动先导阀芯向下移动x,先导阀口打开,先导级处于工作状态,使得流量主阀上腔压力低于下腔的压力,流量主阀阀芯有一位移y,流量主阀阀口打开,流量阀工作。
REXROTH力士乐比例方向阀参数分析

REXROTH力士乐比例方向阀参数分析REXROTH力士乐比例方向阀参数分析REXROTH力士乐比例方向阀能够根据输人信号的极性和幅值大小,同时对液流的方向和流量进行控制。
液流的流动方向取决于相应比例电磁铁是否受到激励,在压力差恒定的条件下,通过电液比例方向控制阀的流量与输人电信号的幅值成正比。
REXROTH力士乐比例方向阀与普通电磁换向阀的区别是直动式电液比例方向控制阀采用比例电磁铁代替普通电磁换向阀中的普通电磁铁。
随着液压传动和液压伺服系统的发展,生产实践中出现- -些即要求能够连续的控制压力、流量和方向,又不需要其控制精度很高的液压系统。
由于普通的液压元件不能满足具有一定的伺服性要求,而使用电液伺服阀又由于控制精度要求不高而过于浪费,因此近几年产生了介于普通液压元件(开关控制)和伺服阀(连续控制) 之间的比例控制阀。
电液比例控制阀(简称比例阀)实质上是一种性价比高、抗污染性能较好的电液控制阀。
比例阀的发展经历两条途径,一是用比例电磁铁取代传统液压阀的手动调节输入机构,在传统液压阀的基础下:发展起来的各种比例方向、压力和流量阀;二是一些原电液伺服阀生产厂家在电液伺服阀的基础上,降低设计制造精度后发展起来的。
力士乐REXROTH比例阀特点:比例控制阀是一种按输入的电信号连续、按比例地控制液压系统的流量、压力和方向的控制阀,其输出的流量和压力可以不受负载变化的影响。
比例阀与普通液压元件相比,有如下特点:(1)电信号便于传递,能简单地实现远距离控制。
(2)能连续、按比例地控制液压系统的压力和流量,实现对执行机构的位置、速度、力量的控制,并能减少压力变换时的冲击。
(3)减少了元件数量,简化了油路。
REXROTH力士乐比例方向阀图片:REXROTH力士乐比例方向阀参数分析REXROTH力士乐比例方向阀Qn= 350 l/min; 压缩空气接口出口: G 1/8; 电子连接: 插头, EN 175301-803, 形式 C; 信号连接: 输入端和输出端, 插头, EN 175301-803, 形式 C; 伺服阀(导阀)安装方式提动阀移向…处控制相似的zui小/zui大环境温度+5°C / +50°Czui小/zui大介质温度+5°C / +50°C介质压缩空气颗粒大小 max. 50 ?m压缩空气中的含油量 0 mg/m? - 0,1 mg/m?Qn 350 l/min安装位置垂直滞环 0,1 bar工作运行电压 24 V电压偏差DC -10% / +10%允许的脉动 5%功率消耗 max. 0,2 A保护等符合 EN 60 529: 2001带有接线盒 / 插头 IP 54压缩空气接口人口 G 1/8压缩空气接口出口 G 1/8压缩空气连接排气 G 1/8重量 0,6 kg材料:外壳铝材-压铸件; 压铸锌密封丙烯树胶额定流量Qn,当工作压力为7 bar、二次压力为6 bar及Δp = 0.2 bar时德国技术性备注■ 压力露点必须少低于环境和介质温度15 °C,并且允许的zui高温度为3 °C。
rexroth电液比例技术

电液轴控系统的选择传动与控制系统f传动与控制系统的主要功能是控制系统的f位置Positionf速度Velocityf加减速度Acceleration / decelerationf加减速度的变化Jerkf输出力Force传动与控制参数在液压系统中的变换f在液压系统中相对应参数是f位置Position也是位置f速度Velocity对应的是流量Flowf加减速度Acceleration / deceleration对应的是阀门开启速度Rampf加减速度的变化Jerk对应的是阀门开启速度的变化f输出力Force对应的是压力Pressure在选择电液控制系统时,先要确定液压系统中需要控制什麽参数按精确度及反应的要求来决定是否采用闭环系统电液比例控制系统f若精度要求不高可考虑使用电液比例控制系统一般电液比例控制系统可达至以下精度f位置精度–3 mmf速度精度带压力保偿器– 3f加减速斜波坡时间–0.5 秒f压力带位移传感器的产品–比例压力阀最高设定的0.3%如最高压力设定为200bar精度可达0.6 bar电液比例控制系统f电液比例元件f电液比例阀大小的估算f常用之电液比例迴路直控式比例方向阀4WRA4滞环≤5%4灵敏度: ≤0.5% ;4反向域: ≤1 %4相频特性(-900, 50%输入信号):10 ~ 25 Hz电液比例元件f 精度较低, 响应较慢f 滞环≤6%电液比例元件先导式比例方向阀: 4WRZf 精度较高, 响应较快f 滞环≤1 %f 灵敏度: ≤0. 5% ;f 频响15~20 Hz电液比例元件带反馈的先导式比例方向阀:WRKE电液比例阀的性能f滞环同一输入讯号上增量时与减量时所得出输出量的偏差以4WRKE为例滞环少于1重复精度在重复调节同一输入信号时输出值所出现的偏差以4WRKE为例重复误差少于0.5电液比例阀的性能f流量曲线是指在一固定压差下比例信号与流量之曲线电液比例阀的性能f带内置放大板的比例电磁阀Type 4WS2EEf 滞环≤±1.5 %f 重复精度: ≤±2 % f 线性度:最高压力的±3.5 % f 开关时间:30~150ms电液比例元件比例谥流阀DBETf 滞环≤±0.2 %f 重复精度: ≤±0.1% f 开关时间: 10~30ms电液比例元件带反馈的比例谥流阀0 810 402 073电液比例控制系统f电液比例元件f电液比例阀大小的估算f常用之电液比例迴路公称流量公称压力的阀门由零开启到最大试验配置和伺服阀门试验相同流量与和阀芯-行程的关系的图表为免需要在不同的压差计算流量= Valve pressure differential to DIN 24 311 (input pressure油泵压力与负载压力之间的差别电液比例阀门选择的例子设汁例子二个工程师为相同的应用程序选择阀门工程师#1计算出工作压力为P = 100 bar流量Q = 60 升分工程师#2计算出与上述相同的结果工程师#1选取了4WREE10V50在Q = 60 升分时压降为20bar工程师#2 选取了4WREE10V75在Q = 60 升分时压降为10bar#1的选择#2的选择f比例阀门选择的例子设计提示1.工程师#1的选择较佳原因一般的比例控制系统是恒压差的而压力保偿阀的没定都在10 Bar 范围内选用压差高的阀门可提高控制的分解度若速度末能达到要求可藉着增加压差来提高速度2.工程师#2 将会得到一个效益较高的系统适用于非动态系统因为阀门的压差较小但由于阀门的压差较小在阀门的开口度为75% 时系统便以最高速度移动即可控范围只有75%降低压差来增加分解度并不是好辨法原因是压差会受液压油温度变化所影响而降低压差则使系统的速度会受油温影响电液比例阀门大小的选择1.若系统所需流量在两个额定流量之中(如例子中60l/min) 则选用额定流量中较低的阀门(如例子中4WREE10V50)2.如用变量泵系统则应使用负荷传感迴路如使用储能系统则应加上压力保偿器以保证电液比例阀在工作時之压差不变电液比例控制系统f电液比例元件f电液比例阀大小的估算f常用之电液比例迴路f由於一般的多驱动器液压系统皆要求流量及压力控制,所以博世力士乐提供比例压力及流量控制系统被广泛地使用•开环式比例压力及流量控制可用於定量泵及变量泵系统定量泵系统变量泵系统电液比例之压力及流量控制f速度比例控制多用於自动化控制注塑机压力机等f 速度和流量比例控制的分别是流量控制是只控制供油量,并不控制驱动元件之运动方向,若系统负载及变速要求也高, 则要使用速度控制系统配合定量泵使用之速度控制–速度比例控制可使用多种类的比例方向阀:如4WRA,4WRZ,4WRE及4WRK等–放大器一般会选用带指令值的产品, 如VT-VSPA2,VT-VSPD-1及VT-VRPD等电液比例之速度控制为何需使用闭环f使用闭环的主要原因f保持设定值不受外来干扰所影响•在不同的工作压力下保持稳定的速度•在不同的输出力下保证相同位置•在带偏载的情况下作同步移动f提高精度要求•位置误差低于 1 mm•压力误差低于 1 bar•需要控制加减速度f高动态要求的系统•模似应用•测验应用解决刚性限制为了要维持液压缸固定的位置不受负载变化影响,可使用下列各项方法:1. 机械限位( 金属对金属)或2. 闭环控制相同的条件对于恒速驱动也是需要的, 同样地可使用下列各项解决方法:1. 电的伺服驱动(Indramat of BRC)或2. 在液压驱动中使用: 负荷传感的闭合回路, 负载保偿器或电液闭环真正的理想理想线性讯号而没有延迟或失真例:一枝棒或杆直接地把输入变成对应的输出弹簧-质量系统弹簧-质量f o在阻尼影响下衰变每个机器皆有质量并且不是绝对坚硬弹簧-质量系统在一个带fo的机器轴上, 在二个固定的位置010之间振动它慢慢地理想地010如果我们加大频率, 机器输出的幅度将会变大! 这可能是危险的及会损每个机器都有一个工作的极限器的固有频率则会触发机器在那个固有频率而产生的共呜这一定被避免否则会发生严重事故56f o每秒多少个周期阻尼的效益该如何控制共呜的反应如果阻尼在弹簧-质量系统增加波幅可增大或超调量" 可被减少后继的图表演示如果我们增加阻尼, 我们的实验将会如何改变为了理解效果我们把早先实验用的移动元件浸在不同的液体内:–水(d ≈0.5)–密糖(d ≈2)–热焦油(d ≈20)增加阻尼的效果阻尼比值 d ≈0.7 可达至最佳的总体响应不幸地增加阻尼会引发另外的一个问题在输入和输出之间的时迟,即所谓的相滞会增大附注一个液压驱动器的阻尼通常在0.05~0.4之间, 而将会按此响应比例的阀门及伺服阀门是以阻尼比率0.75设计它们并没有发生超调该如何增加阻尼1藉由把动能转换成热能消耗掉称为被动阻尼(在汽车吸震器中便用) 或;2使用带反馈的闭合回路抵消振荡积极地制止动能的产生叫做主动阻尼两个方法在现今的系统上都有被采用改善阻尼如何产生阻尼注意:增加摩擦是看来简单的方法来增大被动阻尼这是个陷阱摩擦力在起动时较高在移动时较低动摩擦力比静摩擦力低高的静摩擦使系统的性能变得差劣所以要将静摩擦力减到最低在大部份的闭环应用上都使用线性轴承或滚珠导套就是为了减少摩擦力所引起的影响若想增大被动阻尼应从液压系统内着手机械设备的刚性重要的提示如果被动的机器结构是可变形的( 典型情况), 结果是一个二次方的复合式弹簧–质量系统在大多数靖况下是四次方及更高次方由于人工计算这些系统是非常困难的所以机器设计者总是尽可能地增加被动结构的刚性设汁的目标要让被动结构的固有频率比液压驱动的固有频率高 3 倍若机器带这比率它的动态性能将不会对整体的驱动表现带来很大的影响当比率是10:1 的时候机器可视作一个刚性结构在设计驱动系统时可以不考虑它的影响液压驱动系统的特性弹簧质量定义传动的需求1.静态方面-力的平衡也就是液压缸一定有充足的输出力来支撑而且移动负载∆F = p •A-必需考虑压杆的稳定性如有需要便得更改液压缸的安装方法或加大杆的直径2.动态方面-驱动轴应该有充份的动态响应来适应负载的变化和加速度如我们先前在波特-曲线图所见当驱动轴在极限频率以下工作时它将会显示出刚性及以很少的不利动态的效果当设计液压驱动系统的时候好设计为阀门之间的管长度来改良驱动轴的固有频率假若增加推杆与把阀门安装在液压缸的效果互相抵诮在液的值为由于摩擦力在起动时较高在移动时较低速时产生爬行现象为了克服摩擦力的影响PTFE静液压轴乘态性能的液压缸上由液压缸密封起的漏泄会增加阻尼缺点效率下降减少了静态的准确度闭环系统内使用的控制阀f理想的阀门会有零的反应时间并且对任何输入信号都能产生反应现实上的阀门有跃阶响应的时间, 而且有一个称为分辨率的最低反应讯号, 更加上真正零-重叠的阀芯只能在座子阀中看到由于一般采用滑阀的设计零-重叠阀在零讯号时总带有漏泄f设计者因此必定选择在他的预算内最好的元件,来达成最高的静态准确度阀门的选择f阀门有三个可选的特牲:f阀门的流量压降f阀门的反应时间f阀芯的功能f阀门的选择受系统需要预算等影响。
电液控制课件04
2、分类
液压控制 元件
开关 控制
比例 控制
手动比例控制
电液比例控制
数字式
模拟式
电液伺服控制
电液比例控制
电液伺服控制
电液比例控制
3
二、电液比例控制技术的特点
1、很多年来,大多数工业液压系统曾经用 电器方法实现顺序控制但却靠手动调整。 (换句话说,执行器的起动、停止和方 向控制曾经用电磁铁来实现,但是流量 和压力的设定却是靠手动调整阀。在许 多用途中已经证实这是一种令人满意的 配置而且完全可以继续这样做。)
11
三.结构特点
早期比例阀,多数是用比例电磁铁 替代传统工业液压阀的调节手柄而成。 近期的比例阀具有如下特点: 1、与插装阀结合,开发出各种不同功能和 规格的二通插装式比例阀,插孔符合ISO 和国标。二通插装型开关和比例控制元 件,具有结构上的兼容特性。
12
2、生产批量较大的比例压力阀、比例方向 阀,常与开关阀通用主阀阀体(有的甚 至通用先导阀体),有利于生产管理和 标准化设计,也将给原有液压系统的技 术改造带来方便。 3、应用新近开发的双向极化式耐高压比例 电磁铁,发展了三通(P、A、O三个主通 油口)插装式比例阀,其插孔正在形成 标准。 4、力反馈比例元件可以配用多种控制输入 方式,不同的输入单元,具有统一的联 接尺寸。
电液控制技术04
——电液比例技术
1
第一章
比例技术概述
§1-1 比例技术含义
电液比例技术是连接现代电子技术和大功 率工程控制设备之间的桥梁,已经成为现代控 制工程的基础技术构成之一。 一、比例技术含义 1、广义定义:在应用液压传动与控制和气压传 动与控制的工程系统中,凡是系统的输出量, 如压力、流量、位移、转速、速度、加速度、 力、力矩等,能随输入控制信号连续成比例地 2 得到控制的,都可称为比例控制系统。
高炉开铁口机的控制系统设计
D O模块 、 I ,/ 1 I , 一
加 速时问 一
0
减速时间 -
图 1 P L C硬 件 和 网 络 配 置
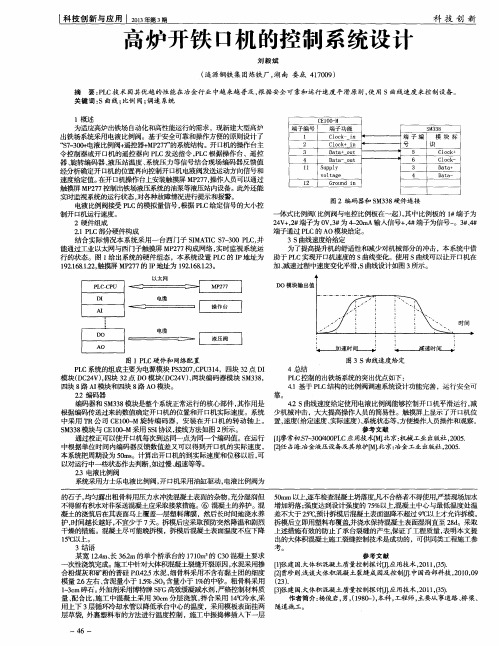
图3 S曲线速度给定
P L C系统 的组成 主要 为电源模 块 P S 3 2 0 7 , C P U 3 1 4 ,四块 3 2 点D I 模 块( D C 2 4 V ) , 四块 3 2 点D O模 块 ( D C 2 4 V ) 、 两块 编码 器模 块 S M 3 3 8 , 四块 8 路A I 模块 和四块 8 路A O模块 。
2 - 3电液 比例 阀
4 2 S 曲线速度给定使用电液比例阀能够控制开口机平滑运行, 减 少机械冲击 ,大大提高操作人员的简易性 。触摸屏上显示了开 口机位 置, 速度( 给定速度、 实际速度 ) 、 系统状态等, 方便操作人员操作和观察。
参考 文献
【 1 掺 常初. ¥ 7 - 3 0 0 / 4 0 0 P L C 应用技术口 哪 . 北京: 机械工业出 版社 , 2 0 0 5 .
i n S v u o p l p t l a y g e
f l 2 G r o u n d i n
3 4
D a t a + —
图 2编码 器和 S M3 3 8 硬件 连接
体式 比例 阀 ( 比例 阀与电控 比例板在一 起 ) , 其 中比例板 的 1 #端子 为 2 4 V + , 2 # 端子为 0 V, 3 # 为4 - - 2 0 m A输 人信号 + , 4 # 端子 为信号一 。3 # 、 4 # 端子通过 P L C的 A O模块 给定 。 3 S 曲线 速度给给定 为了提高提升机的舒适I 生 和减少对机械部分的冲击 , 本系统中借 助于 P L C 实现开口机速度的 S曲线变化。使用 s曲线可以让开口机在 加、 减速过程 中速度变化平滑 , S曲线 设计如 图 3 所示 。
力士乐比例放大器培训手册

最新资料推荐力士乐比例放大器培训手册ReXrOthBOSCh GrOUP教学培训系统培训手册电液比例技术RE00 236/01. 961 / 62ReXrOthBOSCh GrOUP培训手册-电液比例技术教学培训系统目录表页次1.安全规则 ........................................... 1/1 - 1/21. 1 1. 2 电气安全规则 ................................................. 1/1液压安全规则 .................................................... 1/22. 培训手册前言 ............................................... ..2/1 ........................................................... 3. 电液比例技术的基本原理 .................................... 3/1 - 3/353. 1 概论 ........................................... ••....... ……..3/1 3.2 比例技术 ........................................................ 3/1 3.2. 1 力控制型比例电磁铁...... ..3/2 3. 2.2位置调节型比例电磁铁 ................................... ..3/2 3.3直动式比例方向阀 ................................................. 3/5 3.3.1 与时间相关的定位 ....................................... .3/11 3.4直动式比例溢流阀 ................... ........ ................... 3/14 3.5 先导式比例溢流阀 .............................. ...... ..... . 3/16 3.6 二通比例流量最新资料推荐3 / 62阀 .................................... . ......... …3/19 3. 7电 控 器 ....... ................................................ .3/ 23 3.7. 1 比 例 放 大 器 VT5005 ............................. ・・・. 3/23 3. 7. 2 指 令值预选 .................................................... 3/243.7.3 斜 坡 发 生 器 ................................................ 3/26 3.7.4 斜 坡时间调节 .................................................. 3/273.7.5 实 际 值 检 测 ................................................ 3/28 3. 7. 6 阶 跃函数发生器 ................................................ 3/293.7.7 PlD 控 制 器 ................................................. 3/30 3. 7.8 比例放大器VT2000 .......................................-.3/313.7.9 比 例 放 大 器 VT3000 ................................. ... 3/33RE00 236/01.96保留修改权ReXrOthBOSCh GrOUP 培训手册-电液比例技术教学培训系统4.需...4/1 5.需要的 液压元件 ...................................... ...5/15.1元件要的电气元件板 .......................................... 5/2 - 5/4 6.练习 ............................................ Vl - V9 7. 附件RE 00 236/01. 96版权所有不得复制,保留修改权最新资料推荐ReXrOthBOSCh GrOUP培训手册-电液比例技术教学培训系1.安全规则1.1安全规则电气为了对电器系统和装备进行操作,必须遵守由工业贸易协会颁发的“电器系统和装备”事故预防规则(VBG4),以及VDE规则VDEolO5第1款和第12款。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
f 滞环 ≤ 6%
电液比例元件
带反馈的先导式比例方向阀: WRKE
f 精度较高, 响应较快 f 滞环 ≤ 1 % f 灵敏度: ≤ 0. 5% ; f 频响 15~20 Hz
电液比例阀的性能
f 滞环 同一输入讯号上 增量时与减量时所得出输出量的偏差 以4WRKE
为例 滞环少于1
(80)
P→A →/T B or
P→B →/T A
QNOM
4
1 ∆p = 10 bar constant
3 2
2 ∆p = 20 bar constant
3 ∆p = 30 bar constant
1
4 ∆p = 50 bar constant
5 ∆p = 100 bar constant
0 15 20
电液闭环
使用闭环位置控制的例子 1. 机械式液压闭环控制
F
2. 电控式液压闭环
F S U
Posi位tio移n T传ra感ns器ducer
反馈 Feedback
误差 Error
命令 Command
Co控n制tro器ller
CV控oan制lvtreo阀l
机械设计对电液闭环系统有甚麽影响 ?
一个 真正的 液压驱动如何不同于一个 理想 驱动? 响应
定量泵系统
变量泵系统
电液比例之速度控制
f 速度比例控制多用於自动化控制 注塑机 压力机等 f 速度和流量比例控制的分别是流量控制是只控制供油量,并不控制驱
动元件之运动方向,若系统负载及变速要求也高, 则要使用速度控制 系统
配合定量泵使用之速度控制
–速度比例控制可使用多种类 的比例方向阀:如 4WRA,4WRZ,4WRE 及4WRK等
阀门的流量曲线
f众所周知, 阀门进出口之间的压差是系统压力和负载压力之
间的差别 f说明韦一般提供的 公称流量 是在 公称压力 下量得
的
pP = 10 bar
比例阀
采用的压降 Pv = 10 bar
QNom
阀门由零开启到最大 并记录下典型的非线性流量
曲线
阀门压降的选择
试验配置和伺服阀门试验相同 产生出 流量与和阀芯-行程的 关系 的图表 为免需要在不同的压差计算流量 说明书提供了一组在不同压差 下的流量曲线: Pv = 20 bar
最高压力的 ± 3.5 % f开 关 时 间 :
30~150ms
电液比例元件
带反馈的比例谥流阀 0 810 402 073
f 滞环 ≤ ± 0.2 % f 重复精度: ≤ ± 0.1% f 开关时间: 10~30ms
电液比例控制系统
f 电液比例元件 f 电液比例阀大小的估算 f 常用之电液比例迴路
电液轴控系统的选择
传动与控制系统
f 传动与控制系统的主要功能是控制系统的
f 位置
Position
f 速度
Velocity
f 加 减速度
Acceleration / deceleration
f 加 减速度的变化 Jerk
f 输出力
Force
传动与控制参数在液压系统中的变换
f 在液压系统中 相对应参数是
重复精度 在重复调节同一输入信号时 输出值所出现的偏差 以 4WRKE为例 重复误差少于0.5
电液比例阀的性能
f 流量曲线是指在一固定压差下 比例信号与流量之曲线
电液比例阀的性能
f 带内置放大板的比例电磁阀
Type 4WS2EE
电液比例元件
比例谥流阀 DBET
f 滞环 ≤ ± 1.5 % f 重复精度: ≤ ± 2 % f 线性度:
1. 固有频率 2. 阻尼
例如:
1. 每秒钟振荡的的次数是
T= 1
fo
T
m
固有频率 fo
2. 在一段时间之后, 振荡会 在阻尼影响下衰变
固有频率的计算
固有频率全是有以下项式决定: – 传动系统的弹性常数 "C" – 连接刭驱动的质量 "M"
C
fo =
M
2π
为什么固有频率应该是愈高愈好的?
一个简单的实验证明:
–放大器一般会选用带指令值 的产品, 如VT-VSPA2,VTVSPD-1及VT-VRPD等
为何需使用闭环
f 使用闭环的主要原因
f 保持设定值不受外来干扰所影响 • 在不同的工作压力下保持稳定的速度 • 在不同的输出力下保证相同位置 • 在带偏载的情况下作同步移动
f 提高精度要求 • 位置误差低于 1 mm • 压力误差低于 1 bar • 需要控制加 减速度
f 位置 Position 也是位置 f 速度 Velocity 对应的是流量 Flow f 加 减速度 Acceleration / deceleration 对应的
是阀门开启速度 Ramp f 加 减速度的变化 Jerk 对应的是阀门开启速度的变化 f 输出力 Force 对应的是压力 Pressure
PL = 0 bar
不同材料的强度
1T ∆X = 0.7 cm
液压油 99.3 cm
1T
∆X = 0.4 cm
水 99.6 cm
PL = 100 bar
1T
PL = 100 bar
空气
∆X = 99 cm
PL = 100 bar
1 cm
1T ∆X = 0.002 cm
钢铁 99.998 cm
PL = 100 bar
比例阀门大小的估算
压降 压降 (∆p) 的定义为系统 油泵 压力与负载压力之间的差别
负载压力需要使用进口节流迥路才能直接量得 例子 1:
pL
Q
AP
∆PV pP = 100%
∆F
pL =
∆F Ap
∆pV = pP – pL
电液比例阀门选择的例子 设汁例子 二个工程师为相同的应用程序选择阀门
工程师 #1 计算出工作压力为 P = 100 bar 流量 Q = 60 升 分 工程师 #2 计算出与上述相同的结果
30
40 50
60 70
80
90 100
Co mman d value in %
∆p = Valve pressure differential to DIN 24 311 (input pressure pP minus load pressure pL minus return line pressure pT)
解决刚性限制
为了要维持液压缸固定的位置不受负载变化影响,可使用下列 各项方法:
1. 机械限位( 金属对金属) 或
2. 闭环控制 相同的条件对于恒速驱动也是需要的, 同样地可使用下列各项
解决方法: 1. 电的伺服驱动 (Indramat of BRC)
或 2. 在液压驱动中使用: 负荷传感的闭合回路, 负载保偿器或
电液比例控制系统
f 电液比例元件 f 电液比例阀大小的估算 f 常用之电液比例迴路
电液比例元件
直控式比例方向阀 4WRA
4 滞环 ≤ 5% 4 灵敏度 : ≤ 0.5% ; 4 反向域 : ≤ 1 % 4 相频特性(-900, 50%输入信号):10 ~ 25 Hz
电液比例元件
先导式比例方向阀: 4WRZ
增加阻尼的效果
阻尼比值 d ≈ 0.7 可达至 最佳的总体响应
不幸地 增加阻尼会引发 另外的一个问题
在输入和输出之间的时迟, 即所谓的 相滞 会 增大
改善阻尼
附注 一个液压驱动器的阻尼通常在 0.05~0.4之间, 而将会按 此响应
比例的阀门及伺服阀门 是以阻尼比率 0.75设计 它们并没有发生超调
每个机器皆有质量并且不是绝对坚硬 结果所有的机器都是 弹簧-质量 系统
在一个带fo的机器轴上, 在二个固定的位置 之间振动它
0 和 10
机器的极限被固有频率所限制
如果我们 慢慢地 移动轴,机器将会 理Bode Plot
100
Limit
10 幅度
即可控范围只有75% 降低压差来增加分解度并不是好辨 法 原因是压差会受液压油温度变化所影响 而降低压差 则使系统的速度会受油温影响
电液比例阀门大小的选择
1. 若系统所需流量在两个额定流量之中(如例子中 60
l/min) 则选用额定流量中较低的阀门(如例子中 4WREE10V50)
2. 如用变量泵系统 则应使用负荷传感迴路 如使用储能系
比例阀门选择的例子
设计提示
1. 工程师 #1 的选择较佳 原因一般的比例控制系统是恒压
差的而压力保偿阀的没定都在 10 Bar 范围内 选用压差 高的阀门可提高控制的分解度 若速度末能达到要求 可 藉着增加压差来提高速度
2. 工程师 #2 将会得到一个效益较高的系统 适用于 非动
态系统 因为阀门的压差较小 但由于阀门的压差较小 在阀门的开口度为 75% 时 系统便以最高速度移动
理想 或 线性 驱动能把所有的输入(指令)讯号转换成输出 讯号而没有延迟或失真 输入信号的例子:
– 开/关,停止/去 – 模拟电压 – PLC程序的输入 输出 例:一枝棒或杆直接地把输入变成对应的输出
入
出
弹簧–质量系统的响应
稍後我们会证明, 液压传动是 弹簧-质量 系统
弹簧-质量 系统有二个观察得出的特性:
电液控制系统之选择
f 在选择电液控制系统时,先要确定液压系统中需要控制什麽参数
f流量 f压力
f – 到驱动元件之流量,并不理会驱动元件之运动方向
流量= Kf * A * ∆P
P – 用以设定系统中不同驱动元件之工作压力
f速度 V – 可控制驱动元件之运动方向及速度
f位置 S – 控制驱动元件之停止位置