CAN总线技术BT-Canbus(完整版)
CANBUS总线说明
CANBUS总线说明CANBUS特性系统采用CANBUS通讯方式,设计为现场总线连接方式,即是手拉手接线方式组网非常方便,终端上并跳接120欧姆电阻,总线方式实现“即插即用”的便利条件。
CAN总线可以由多个子网络组成,每个子网络必须满足以下条件:(1)同一网络中允许挂接110个节点(2)传输距离最远为10千米如果子网络超出以上任一条件,须增加网络桥扩展可组成多重网。
以下是CANBUS单个网络的结构:CAN总线方式优点:1、线路简单有利于综合布线,节省管线材,具有组网自由、安装方便、扩充容易,改造灵活。
2、硬件连接简单, 具有实时性强、可靠性高、通信速率快、结构简单、互操作性好、总线协议具有完善的错误处理机制、灵活性高和价格比高。
3、数据传输速率高,在传输距离小于40 m时,最大传输速率可达1 Mb/s,传输距离10km时速率达5kbps。
4、传输距离远,扰干扰能力强。
5、具有突出的可靠性、实时性和灵活性。
6、采用点对点、一点对多点及全局广播几种数据收发方式。
7、实现单点、双点、多点、区域、群组控制、场景设置、定时开关、亮度手自动调节、红外线探测、集中监控、遥控等多种照明控制控制。
8、可实现全分布式多机系统,并且无主、从机之分,每个节点均主动发送报文,可方便地构成多机备份系统。
9、采用非破坏性总线仲裁技术,两个节点同时上传送数据时,优先级低的节点主动停止数据发送,优先级高的节点可不受影响地继续传输数据,有效避免了总线冲突。
10、短帧结构总线上每帧有效字节数最多为8个,并有可靠的错误检测和处理机制CRC 循环冗余校验措施,受干扰数据出错率极低,万一某一节点出现严重错误,可自动脱离总线,总线上的其他操作不受影响。
11、控制回路与强电分离,采用弱电DC24VCANBUS综合布线CANBUS总线为4线制现场总线采用STP 4*0.75将其所有元件连成一个网络,为了保证系统通讯的可靠,布线时CAN总线尽量不与强电缆共用同一线槽,应将CAN总线单独穿钢管或PVC管敷设,并与电力电缆的水平距离至少大于300mm,下列为某项目布线图:1、CANBUS总线(控制面板)采用STP 4*0.75手拉手方式进行连接汇聚于配电箱。
CAN Bus简介

CAN总线在智能网联汽车中的技术挑战
需要解决高实时性、高可靠性、高安全性等方面的技术问题。
THANKS
感谢观看
CAN Bus技术演进
高速CAN总线技术
目前CAN总线已达到1Mbps,未来将进一步提高至4Mbps或更高,以满足日益增长的数 据传输需求。
低压CAN总线技术
低压CAN总线以其灵活性和低成本性在汽车电子领域得到广泛应用,未来将进一步优化 其性能和可靠性。
CAN总线与互联网技术的融合
随着物联网技术的发展,CAN总线将与互联网技术融合,实现远程监控和管理,提高汽 车智能化水平。
CAN Bus被用于工业自动化控制 系统中的数据传输和控制,例如工 厂自动化生产线、机器人控制系统 等。
其他领域
除了汽车和工业自动化领域,CAN Bus还被应用于医疗设备、航空航 天、智能家居等领域中。
02
CAN Bus通信协议
CAN协议概述
01
CAN是控制器局域网(Controller Area Network)的缩写, 它是一种用于汽车和其他工业应用场合的通信协议。
应用
与CAN控制器一起广泛应用于汽 车、工业自动化、楼宇自动化等
领域。
CAN总线电阻
作用
CAN总线电阻用于匹配总 线上的阻抗,以确保数据 传输的稳定性和可靠性。
类型
分为终端电阻和线电阻两 种类型。
应用
在CAN总线系统中,终端 电阻通常用于连接CAN控 制器和CAN收发器,而线 电阻用于连接其他设备。
灵活性
CAN Bus支持多种数据传输速 率,同时可以适应不同的网络 环境,具有较强的灵活性。
成本效益
CAN-BUS总线
•
(4)通信协议中有个仲裁系统,通常这个系统按照每条信息的数字拼法为各数据
传输设定优先规则。例如,以0结尾的数字信息要比以1结尾的有优先权。
2
CAN数据总线传递数据的构成
• CAN数据总线在极短的时间里,在各控制单元间传递数据,可将其
转向角度 传感器
转向柱电气 控制单元 驱动 CAN bus 多功能方 向盘控制 单元
舒适系统中 央控制单元
轮胎压力 监控控制 单元
驻车加热 空调控制 控制单元 单元
挂车识别 控制单元
停车辅助 座椅调节 控制单元 控制单元
汽车电气 控制单元
转向柱电气 控制单元 舒适 CAN bus
语音输入 控制单元
卡片阅读 器
被送入低位CAN
线。
状态域:判定数据中的优先权。如果两个控 制单元都要同时发送各自的数据,那么,具 有较高优先权的控制单元,优先发送
• 检查域:显示在 数据域中所包含 的信息项目数。 在本部分允许任 何接收器检查是 否已经接收到所 传递过来的所有 信息。
数据域:在数据域中,信息被传递到其他控 制单元。
•一个电话用户(控制单元)将 数据“讲”入网络中,其他用户 通过网络“接听”这个数据 •对这个数据感兴趣的用户就会利 用该数据,而其他用户则选择忽 略
1
CAN的优点
--减少信号线及传感器的个数。一个传感器的信号可以通过CAN-BUS 传输给多个控制器,而不是给每个控制器配一个同样功能的传感器。 因此可节省导线(现在整车线束已经约3km长),成本低。
1
数据总线的类型
CANBUS原理介绍
CAN总线原理介绍一.现场总线简介1、现场总线的概念:现场总线是应用在生产现场,在微机化测量控制设备之间实现双向串行多节点数字通信的系统。
也被称为开放式的数字化多节点通信的底层控制网络。
现场总线作为智能设备的联系纽带,把挂接在总线上的作为网络节点的智能设备连接为网络系统,并进一步构成自动化系统,实现基本控制、补偿计算、参数修改、报警、显示、监控、优化及控管一体化的综合自动化功能。
2、几种较有影响的现场总线技术:基金会现场总线(FF-Foundation Fieldbus),Lonworks,PROFIBUS,HART,CAN现场总线是几种较重要的现场总线技术。
二.CAN总线技术:1、CAN 总线简介:CAN(Controller Area Network)-控制器局域网。
它是一种有效支持分布式控制或实时控制的串行通信网络。
CAN总线最早是由德国Bosch公司在80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆、光导纤维,通信速率可达1Mbps。
CAN 总线通信接口中集成了CAN 协议的物理层,数据链路层功能,可完成对通信数据的成帧处理,包括位填充,数据块编码,循环冗余校验,优先级判别等项工作。
2、CAN总线技术的主要特点:⑴多主站依据优先权进行访问。
CAN为多主方式工作,网络上的任一节点在任何时候都可以主动地向网络上的其他节点发送信息。
⑵采用短帧传送。
CAN采用短帧结构,废除了对传统的站地址编码,而是对通讯数据进行编码。
每帧数据信息为0∽8个字节,具体长度由用户决定。
⑶无破坏基于优先权的仲裁。
当多个节点同时向总线发送信息时,优先级较低的节点会主动的退出总线发送,而最高优先级的节点可不受影响地继续传输数据,从而大大节省了总线冲突时间。
⑷借助接收滤波的多地址帧传送。
CAN只需通过报文滤波即可实现点对点,一点对多点以及全局广播等几种方式来传输数据,无需专门的“调度”。
canbus现场总线

canbus现场总线第三章 CANbus现场总线现场总线是安装在生产过程区域的现场设备仪表与控制室内的自动控制装置系统之间的一种串行、数字式、多点通信的数据总线。
现场总线(Fieldbus)技术是实现现场级控制设备数字化通信的一种工业现场层网络通信技术,可使用一条通信电缆将现场设备(智能化、带有通信接口)连接,用数字化通信代替4-20mA/24VDC信号,完成现场设备控制、监测、远程参数化等功能。
CAN,全称为“Controller Area Network”,即控制器局域网,由德国Bosch 公司最先提出,已成为国际标准ISO11898(高速应用)和ISO11519(低速应用)。
CAN是一种多主方式的串行通讯总线,CAN的规范定义了OSI模型的最下面两层:数据链路层和物理层。
CAN 协议有2.0A和2.0B两个版本,CAN协议的2.0A版本规定CAN 控制器必须有一个11位的标志符,在2.0B版本中规定CAN控制器的标志符长度可以是11位或29位。
第一节 CAN通信协议3.1.0协议特点CAN总线是一种串行数据通信协议。
它有如下特点:1、CAN协议分层分为目标层、传输层、物理层。
目标层的功能:确定要发送的报文、确认传输层接收到的报文、为应用层提供接口。
传输层的功能:帧组织、总线仲裁、检错、错误报告、错误处理。
物理层的范围包括实际位传送过程中的电气特性。
2、CAN协议逻辑位使用2种逻辑位表达方式。
当总线上的CAN控制器发送的都是弱位时,此时总线状态是弱位(逻辑1);如果总线上有强位出现,弱位总是让位于强位,即总线状态是强位(逻辑0)。
上有强位出现,弱位总是让位于强位,即总线状态是强位(逻辑0)。
3、CAN协议校验.采用CRC校验并可提供相应的错误处理功能,保证了数据通信的可靠性。
4、CAN协议编码方式.使用了数据块编码方式,使得网络内的节点个数在理论上不受限制。
5、CAN协议数据块的长度.规定了数据块的长度最多为8个字节,传输时不会过长占用总线,保证了通信的实时性。
can-bus总线技术介绍
1. CAN总线的产生与发展控制器局部网(CAN-CONTROLLER AREA NETWORK)是BOSCH 公司为现代汽车应用领先推出的一种多主机局部网,由于其卓越性能现已广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。
控制器局部网将在我国迅速普及推广。
随着计算机硬件、软件技术及集成电路技术的迅速发展,工业控制系统已成为计算机技术应用领域中最具活力的一个分支,并取得了巨大进步。
由于对系统可靠性和灵活性的高要求,工业控制系统的发展主要表现为:控制面向多元化,系统面向分散化,即负载分散、功能分散、危险分散和地域分散。
分散式工业控制系统就是为适应这种需要而发展起来的。
这类系统是以微型机为核心,将 5C技术--COMPUTER(计算机技术)、CONTROL(自动控制技术)、COMMUNICATION(通信技术)、CRT(显示技术)和 CHANGE(转换技术)紧密结合的产物。
它在适应围、可扩展性、可维护性以及抗故障能力等方面,较之分散型仪表控制系统和集中型计算机控制系统都具有明显的优越性。
典型的分散式控制系统由现场设备、接口与计算设备以及通信设备组成。
现场总线(FIELDBUS)能同时满足过程控制和制造业自动化的需要,因而现场总线已成为工业数据总线领域中最为活跃的一个领域。
现场总线的研究与应用已成为工业数据总线领域的热点。
尽管目前对现场总线的研究尚未能提出一个完善的标准,但现场总线的高性能价格比将吸引众多工业控制系统采用。
同时,正由于现场总线的标准尚未统一,也使得现场总线的应用得以不拘一格地发挥,并将为现场总线的完善提供更加丰富的依据。
控制器局部网 CAN (CONTROLLER AERANETWORK)正是在这种背景下应运而生的。
由于CAN为愈来愈多不同领域采用和推广,导致要求各种应用领域通信报文的标准化。
为此,1991年 9月 PHILIPS SEMICONDUCTORS制订并发布了 CAN技术规(VERSION 2.0)。
canbus总线
CAN总线1. 简介CAN(Controller Area Network)总线是一种串行通信协议,广泛应用于汽车、工控等领域中。
它是一种高可靠性、高抗干扰的通信方式,具有多主机、多从机的结构,能够支持多个节点之间的通信。
2. CAN总线的特点2.1 高可靠性CAN总线采用差分传输方式,通过在两条通信线上分别传输互补的信号来实现数据传输,可以有效地抵抗传输线上的电磁干扰和噪声。
此外,CAN总线拥有校验机制,当数据传输过程中发生错误时,接收端可以通过异或校验位来检测错误,并进行纠正。
2.2 多主从结构CAN总线可以支持多个主机和多个从机的通信。
主机用于发送命令和控制数据的节点,从机用于接收并执行命令的节点。
这种结构使得CAN总线非常适用于分布式控制系统,能够实现多个节点之间的实时通信。
2.3 高速通信CAN总线的通信速率可以达到几百kbps甚至几Mbps,可以满足多数应用的通信需求。
高速通信可以保证节点之间的实时性,并且降低通信延时。
2.4 灵活的网络拓扑结构CAN总线支持多种网络拓扑结构,包括总线型、星型、树型等。
这种灵活的结构使得CAN总线可以适用于不同的应用场景,如汽车电子系统中的各种控制模块之间的通信。
3. CAN总线的应用3.1 汽车领域CAN总线在汽车领域中得到了广泛应用。
汽车中有许多控制模块,如发动机控制单元(ECU)、制动控制单元(BCU)、车身控制单元(BCU)等,这些模块之间需要进行实时通信才能保证汽车的正常运行。
CAN总线通过其高可靠性和实时性,成为了汽车电子系统的首选通信协议。
3.2 工控领域在工控领域中,CAN总线也得到了广泛应用。
工控设备通常需要各种传感器和执行器之间的实时通信,以实现工艺过程的监控和控制。
CAN总线可以提供高可靠性的通信,并且支持多主从结构,非常适用于工控场景。
4. CAN总线的实现4.1 硬件实现CAN总线的硬件实现主要包括CAN控制器和CAN收发器。
CAN总线详细教程可修改全文
功能
2个以上控制器所组成的Canbus系统 当用2个以上的控制器连接在Canbus总 线上(如图所示),用逻辑1来表示断开 和用逻辑0表示闭合。不考虑其他总线规 则情况下,总线会出现下图的情况: 1.任何开关闭合,总线上的电压为0伏 2.所有开关断开,总线上的电压为5伏
集中控制系统:由一个电子控制单元(ECU)同时 控制多个工作装置或系统的电子控制系统。如汽车 底盘控制系统。
控制器局域网络系统(CAN总线系统):由多个电 子控制单元(ECU)同时控制多个工作装置或系统, 各控制单元(ECU)的共用信息通过总线互相传递。
带有中央控制单元的车
带有三个中央控制单元的车
基于CAN总线的汽车电器网络结构
发动机 自动变 ABS/TCS 安全气 电控悬 巡航控 动力转 电机控 电池管
ECU 速器ECU ECU
囊ECU 架ECU 制ECU 向ECU 制ECU 理ECU
高速总线
E整EC整CU车U(车(控网控网制关制关器)器)
低速总线
故障诊断 ECU
灯光控 刮雨洗涤 电动座 门锁防 电动车 后视镜 气候控 警告信 仪表显 制ECU 控制ECU 椅ECU 盗ECU 窗ECU 喇叭ECU 制ECU 号ECU 示ECU
求Байду номын сангаас
总之,使用汽车网络不仅可以减少线束,而且 能够提高各控制系统的运行可靠性,减少冗余 的传感器及相应的软硬件配置,实现各子系统 之间的资源共享,便于集中实现各子系统的在 线故障诊断。
Canbus的发展历史
大众公司首次在97年PASSAT的舒适系统 上采用了传送速率为62.5Kbit/m的 Canbus。
can-bus总线技术介绍
1. CAN总线的产生与发展控制器局部网(CAN-CONTROLLER AREA NETWORK)是BOSCH公司为现代汽车应用领先推出的一种多主机局部网,由于其卓越性能现已广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。
控制器局部网将在我国迅速普及推广。
随着计算机硬件、软件技术及集成电路技术的迅速发展,工业控制系统已成为计算机技术应用领域中最具活力的一个分支,并取得了巨大进步。
由于对系统可靠性和灵活性的高要求,工业控制系统的发展主要表现为:控制面向多元化,系统面向分散化,即负载分散、功能分散、危险分散和地域分散。
分散式工业控制系统就是为适应这种需要而发展起来的。
这类系统是以微型机为核心,将5C技术--COMPUTER(计算机技术)、CONTROL(自动控制技术)、COMMUNICATION (通信技术)、CRT(显示技术)和CHANGE(转换技术)紧密结合的产物。
它在适应范围、可扩展性、可维护性以及抗故障能力等方面,较之分散型仪表控制系统和集中型计算机控制系统都具有明显的优越性。
典型的分散式控制系统由现场设备、接口与计算设备以及通信设备组成。
现场总线(FIELDBUS)能同时满足过程控制和制造业自动化的需要,因而现场总线已成为工业数据总线领域中最为活跃的一个领域。
现场总线的研究与应用已成为工业数据总线领域的热点。
尽管目前对现场总线的研究尚未能提出一个完善的标准,但现场总线的高性能价格比将吸引众多工业控制系统采用。
同时,正由于现场总线的标准尚未统一,也使得现场总线的应用得以不拘一格地发挥,并将为现场总线的完善提供更加丰富的依据。
控制器局部网CAN (CONTROLLER AERANETWORK)正是在这种背景下应运而生的。
由于CAN为愈来愈多不同领域采用和推广,导致要求各种应用领域通信报文的标准化。
为此,1991年9月PHILIPS SEMICONDUCTORS制订并发布了CAN技术规范(VERSION 2.0)。
《CANbus简介》PPT课件

3)1987年Intel提交付了首枚CAN控制器82526, 这是CAN方案首次通过硬件实现。不久之后,Philips 半导体推出了82C200。
精选PPT
16
二、CAN总线
精选PPT
5
一、汽车通信网络
1.1、汽车通信网络的发展
传统的电气系统大多采用点对点的单一通信方式, 相互之间少有联系,这样必然造成庞大的布线系统。 据统计,一辆采用传统布线方法的高档汽车中,其导 线长度可达2000米,电气节点达1500个,并且可靠性 低。于是,基于总线的汽车网络应运而生。
下图1、图2分别为相同节点的传统点对点通讯方 式和使用CAN总线的通讯方式,从图可以直观地比较 线束的变化(图中节点之间的连线仅表示节点间存在 信息交换,并不代表线束数量)。
精选PPT
6
Engine Control
Transmission Control
Anti-Lock Brakes
Lighting
Air Condition
Dashboard
Active Suspension
Power Seats
Power Windows
图1:传统的汽车网络
Engine Control
精选PPT
14
一、汽车通信网络
各种协议的简要说明:
FlexRay协议将其时间周期分为静态段和动态段两个部分。静态段采用TDMA方式传输时间驱动类型的数据,动 态段采用Mini-Slot方式传输事件驱动类型的数据。在安全性方面,FlexRay 采用冗余通道的方式确保数据正 确传输,而其它的容错机制并没有直接在协议中明确说明,而交由应用提供者自己设计。这种方法有很大的 设计灵活性,然而会由此产生安全隐患以及兼容性问题。 TTP协议对所有的节点采用TDMA的网络通道分配方式,即所有节点在一个周期内都会传输数据至少一次。整个 系统采用统一的时间标准,所有的节点都存有预先定义的时间表,一旦传输数据和时间表发生了冲突则认为 节点错误。只要一个节点有一次错误,那末该节点将退出通信网络,确保网络不受错误节点的干扰。TTP将 网络成员检查服务也定义在协议中,确保网络中没有可疑的节点。这些虽然限制了该协议的灵活性,但确保 了它的高安全性。
can bus总线工作原理
CAN总线工作原理1. 介绍CAN(Controller Area Network)总线是一种串行通信协议,用于在汽车、工业控制和其他领域的电子设备中传输数据。
它是一种高性能、可靠且实时的通信系统,可以连接多个节点,使它们能够相互通信。
CAN总线的工作原理基于分布式网络的概念,其中每个节点都可以发送和接收消息。
这种分布式的通信架构使得CAN总线非常适合在复杂的系统中进行数据交换。
2. 物理层CAN总线的物理层使用差分信号传输,其中两根导线分别被称为CAN_H和CAN_L。
CAN_H线携带高电平信号,而CAN_L线携带低电平信号。
这种差分信号的设计可以提高抗干扰能力,使得CAN总线能够在噪声环境中可靠地工作。
CAN总线的物理层还定义了传输速率,常见的速率包括1 Mbps、500 kbps、250 kbps和125 kbps等。
较高的速率可以提供更高的数据传输能力,但也会增加传输的误码率。
3. 数据帧格式CAN总线使用数据帧来传输信息。
数据帧由以下几个部分组成:•报文起始位(SOF):用于标识报文的开始。
•标识符(ID):用于唯一标识报文的发送者和接收者。
•控制位(Control):包含一些控制信息,例如数据长度和帧类型。
•数据域(Data):包含实际的数据信息。
•CRC(Cyclic Redundancy Check):用于检测数据传输过程中的错误。
•确认位(ACK):用于确认数据帧是否被成功接收。
•结束位(EOF):用于标识报文的结束。
CAN总线使用基于事件的通信模式,即只有在总线空闲时才能发送数据帧。
当多个节点同时尝试发送数据时,会发生冲突,这种情况称为总线冲突。
为了解决总线冲突,CAN总线采用了一种冲突检测和处理机制,称为非破坏性位定址(Non-Destructive Bitwise Arbitration)。
在非破坏性位定址中,每个节点在发送数据时都会监测总线上的数据信号。
如果发送的数据与总线上的数据不一致,节点会停止发送数据,以避免干扰其他节点的通信。
can总线说明
新一代CAN总线停车场系统特点1、本系统采用光电隔离抗雷击CAN总线通讯网络,多主方式工作,信息主动发送,实时性、灵活性和可靠性远高于采用RS485查询方式工作的通讯网络。
通讯距离可达10KM,非常适合停车场系统现场条件,明显优于100米就要中继的TCP/IP网络。
2、本系统采用非接触式感应卡操作,无机械磨损,免维护。
系统适配各种WG接口IC、ID卡读头及MifareCM500/LEGIC/ TiRFM007B/羊城通等各种专用接口的IC、ID卡读头,新增条码打印机、激光条码扫描枪接口。
适配各种品牌的IC、ID卡,既可新建小区一卡通系统,亦方便与小区原有的门禁、消费等系统组成一卡通。
3、本系统采用专门为停车场系统自主研制的新一代CAN总线控制器,集成度及可靠性极高,功能全面,接口丰富,所有接口均采用抗雷击设计。
具备联机脱机自动切换、临时卡脱机收费、语音提示收费等停车场功能。
标准版控制器具备LED显示屏、车位引导屏、费额屏、自动道闸、微型车辆检测器、发卡机、补光灯及两级CAN总线等接口,卡片容量12000张,脱机记录4万条。
专业版控制器新增EPSON条码打印机、激光条码扫描枪接口,另外具备视频输入输出切换、音频对讲、钱箱电锁、满位灯箱、低温加热、红绿灯等接口。
4、本公司的停车场系统控制器的研发生产经历了近十年的专业实践,整合了各种客户的要求,支持月卡、储值卡、临时卡、操作卡等16种卡片类型,支持16种收费车型及室内室外、节假日、展览日、黄金周、峰谷等多种收费模式。
新一代的CAN总线控制器更可精确完成各类专业停车场系统所要求的各种控制逻辑。
如:车到才能读卡或取卡、一车只能取一卡、月卡读卡与临时发卡互锁(即读了月卡,临时发卡封闭;取了临时卡,不可再读月卡进场,取了临时卡入场的月卡车出场必须读临时卡,确保临时卡无恶意丢失;月卡过期无效时,临时发卡再度开放)、临时发卡无需再次读卡、临时发卡需拔卡后才能抬闸、车到地感捕捉图像、发卡机剩余卡片计数、发卡机缺卡塞卡及时上报、车场剩余车位计数、满位自动关闭系统或关闭临时发卡功能等等。
CANBUS原理介绍
CANBUS原理介绍
CAN总线(Controller Area Network,CAN)是一种高性能多点环形
总线系统,是由Robert Bosch GmbH公司研制的局域网技术,它采用多路
复用的物理环形局域网,结构简单,支持全双工,具有抗干扰能力强,实
现简易,可靠性高,操作速率高,安装灵活,可编程性强、节约线缆布线
长度等特点,可以有效解决多点控制的问题,现已成为车用总线通信系统
中最成功和最广泛采用的总线系统。
CAN总线系统由总线线缆、各终端终端控制芯片、映射器、收发器、
电缆接头等组成。
CAN总线线缆由两条线组成,分别为CAN_H和CAN_L,CAN_H是正极性,CAN_L为负极性,它们分别对应于CAN总线系统的两个
总线信号线,它们同时传输信号。
CAN总线系统中的终端芯片可以被分为发送控制芯片和接收控制芯片,它们分别用于发送和接收CAN总线信息。
发送控制芯片主要用于将CAN总
线信息发送出去,发送控制芯片可以通过对CAN总线信息的编码来发送CAN总线信息。
接收控制芯片可以接收CAN总线信息,并将其解码,以供
使用。
映射器是一种用于连接CAN总线系统的中间设备,它可以将CAN总线
信息转换为其他总线信息,如I2C、SPI等,以符合其他终端芯片的要求。
CANBUS介绍及工作原理
CANBUS介绍及工作原理什么是CANBUS?CANBUS即CAN总线技术,全称为“控制器局域网总线技术(Controller Area Network-BUS)”。
CANBUS总线技术最早被用于飞机、坦克等武器电子系统的通讯联络上。
将这种技术用于民用汽车最早起源于欧洲,在汽车上这种总线网络用于车上各种传感器数据的传递。
CANBUS的工作原理大家知道当今车辆的电控系统是越来越多,例如电子燃油喷射装置、ABS装置、安全气囊装置、电动门窗、主动悬架等等。
同时遍布于车身的各种传感器实时的监测车辆的状态信息,并将此信息发送至相对应的控制单元内。
『车身上各种控制单元的分布图』通过上图我们可以看到车身上的各种控制单元,车越高级,车身上的控制单元也就越多,每个控制单元都可看做一台独立的电脑,它可以接受信息,同时能对各种信息进行处理、分析,然后发出一个指令。
比如发动机控制单元会接受来自进气压力传感器、发动机温度传感器、油门踏板位置传感器、发动机转速传感器等等的信息,在经过分析和处理后会发送相应的指令来控制喷油嘴的喷油量、点火提前角等等,其它控制单元的工作原理也都类似。
在这里可以给大家做一个比喻,车上的各种控制单元就好比一家公司各个部门的经理,每个部门的经理接受来自自己部门员工的工作汇报,经过分析作出决策,并命令该部门的员工去执行。
『控制单元』车身上的这些控制单元并不是独立工作的,它们作为一个整体,需要信息的共享,那么这就存在一个信息传递的问题。
比如发动机控制单元内的发动机转速与油门踏板位置这两个信号也需要传递给自动变速器的控制单元,然后自动变速器控制单元会据此来发出升档和降档的操作指令,那么两个控制单元之间又是如何进行通信的呢?『每项信息都通过各自独立的数据线进行交换』目前在车辆上应用的信息传递形式有两种。
第一种是每项信息都通过各自独立的数据线进行交换。
比如两个控制单元间有5种信息需要传递,那么则需要5根独立的数据线。
CAN-BUS技术简介

Page 8
CAN-BUS技术简介
车载网络基础知识
总线系统的优点: 提高整个系统的可靠性 降低布线成本 减少各种电缆数量 减小导线束横截面 灵活布线 多重使用传感器 能够传输复杂数据 进行系统变更时灵活性较高 随时能够扩展数据范围 为客户实现新功能 有效诊断 降低硬件成本
Page 1
CAN-BUS技术简介
车载网络概述
一般车载网络: * LIN (local interconnect network) 总线 * 中速 CAN (controller area network) 总线 * 高速 CAN 总线 * 媒体定向系统传输(MOST)环
总线 LIN 总线 中速 CAN 总线 高速 CAN 总线 MOST环
Page 9
CAN-BUS技术简介
各控制单元之间的所有信息都通过两根数据线进行交换——CAN数据
总线
Page 10
CAN-BUS技术简介
与数据传输形式1相比,CAN数据总线,所有信息都通过两根数据线进
行传递
相同的数据只须通过CAN数据系统中的两根双向数据线进行传递 通过该种数据传递形式,所有的信息,不管控制单元的多少和信息容
Page 2
波特率 9.6 kbit/s 125 kbit/s 500 kbit/s 24 Mbits/s
CAN-BUS技术简介
CAN是控制单元区域网络Controller Area Network的缩写。 含义是控制单元通过网络进行数据交换。 CAN数据总线可比作公共汽车:
公共汽车可以同时运输大量乘客; CAN数据总线包含大量的数据信息。
产生信 息 10℃ 20℃ 30℃ 40℃
3位的位值变化 0V;0V;0V 0V;0V;5V 0V;5V;0V 0V;5V;5V 5V;0V;0V
CAN Bus.pptx

电池管理
• 控制算法
– 模糊控制算法 – 神经网络算法 – 支持向量回归算法
• 安全性管理
再生制动
• 发电机使车轮产生制动力矩并给蓄电池或 超级电容等充电。 • 再生制动与摩擦制动有效结合 • 要求高效地制动能量回收策略来协调再生 制动和摩擦制动
The USB-847x interfaces are ideal for many types of applications, including: • In-vehicle network monitoring and logging • Bus load monitoring • Device validation with synchronized data acquisition • CAN device development and test • CAN and LIN data correlation with external measurements
电动车的CAN总线的开发
• 电动车的CAN总线特点:
– 可能不须要动力传动系统 – 加入电池管理 – 加入电动机管理
电动车能量流向的管理
• • • • 电池管理 电动机管理 发电机管理(再生制动控制) 电动车行驶状态监测(传感器)
电动机管理
• 低速时的恒磁通转差频率矢量控制策略能 够保证电动汽车在低速启动时的转矩快速 跟随性能; • 中低速时的变磁通效率优化矢量控制可以 有效增加电动汽车的续航里程;
11
1 1 1 4 0-8 bytes 15 1 1 1 7
A (unique) identifier for the data
Dominant (0) (see Remote Frame below) Must be dominant (0)Optional Reserved bit (it must be set to dominant (0), but accepted as either dominant or recessive) Number of bytes of data (0-8 bytes) Data to be transmitted (length dictated by DLC field) Cyclic Redundancy Check Must be recessive (1) Transmitter sends recessive (1) and any receiver can assert a dominant (0) Must be recessive (1) Must be recessive (1)
CAN总线技术详解
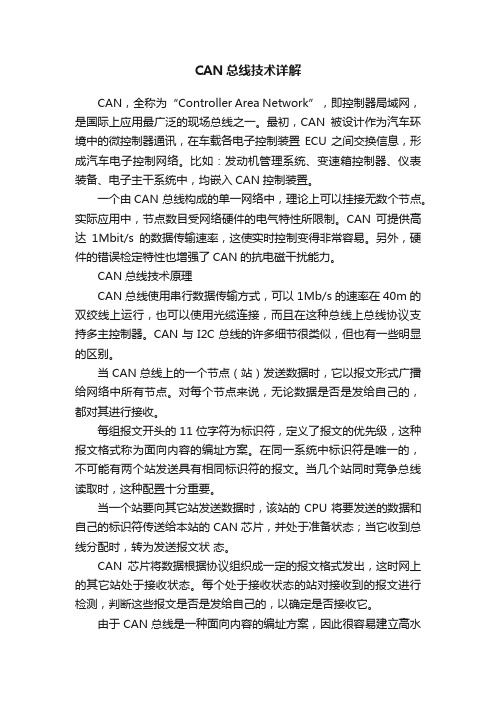
CAN总线技术详解CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。
最初,CAN被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。
比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置。
一个由CAN 总线构成的单一网络中,理论上可以挂接无数个节点。
实际应用中,节点数目受网络硬件的电气特性所限制。
CAN 可提供高达1Mbit/s的数据传输速率,这使实时控制变得非常容易。
另外,硬件的错误检定特性也增强了CAN的抗电磁干扰能力。
CAN总线技术原理CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。
CAN与I2C总线的许多细节很类似,但也有一些明显的区别。
当CAN总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。
对每个节点来说,无论数据是否是发给自己的,都对其进行接收。
每组报文开头的11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。
在同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文。
当几个站同时竞争总线读取时,这种配置十分重要。
当一个站要向其它站发送数据时,该站的CPU将要发送的数据和自己的标识符传送给本站的CAN芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。
CAN芯片将数据根据协议组织成一定的报文格式发出,这时网上的其它站处于接收状态。
每个处于接收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。
由于CAN总线是一种面向内容的编址方案,因此很容易建立高水准的控制系统并灵活地进行配置。
我们可以很容易地在CAN总线中加进一些新站而无需在硬件或软件上进行修改。
当所提供的新站是纯数据接收设备时,数据传输协议不要求独立的部分有物理目的地址。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Sender hinten rechts
G434
Antenne hinten R96
CAN-总线
Vernetzung
CAN-Komfort mit LIN-Slaves
Antenne hinten R96
熊碧虎
Sensor für Regenund Lichterkennung
G397
Wischermotor J400
10 单节点提高的成本
页数: 16
CAN-总线
汽车数据总线系统的发展
➢ 线束总长: 3860米 ➢ 线束数量: 2110 ➢ 重量: 64 kg
熊碧虎
采用最新电子技术和工业现场总线技术 控制单元功能扩展 汽车局域网技术国际标准化
页数: 17
CAN-总线
熊碧虎
页数: 18
CAN-总线
• CAN-Bus是Controller Area Network的缩写, 称为控制单元的局域网,它是车用控制单元 传输信息的一种传送形式。
CAN-总线技术 Anzeige-und Bedieneinheit für Information, vorn J523
Telefon / Telematik J526
Bedienhörer für Telefon
R37
Diagnoseinterface für Datenbus J533
Navigation J401
2001年,大众公司提高了Canbus的设计标准,将 舒适系统Canbus提高到100Kbit/m, 驱动系统提高 到500Kbit/m。
98年在PASSAT和GOLF的驱动系统上增 加了Canbus,传送速率为500Kbit/m。
2002年,大众集团在新PQ24平台上使用带有车 载网络控制单元的第三代Canbus。
40
35
30
25
20
15
Passat B5
10
5
Golf A4
0
1996 1997 1998
熊碧虎
Touareg Phaeton D1
Golf A5
Passat B5GP
Golf A4, Polo A04
Golf A4
1999 2000 2001 2002 2003 2004 2005
页数: 14
CAN-总线
Frischluftgebläse J126
Climatronic J255
Sender vorne links G 431
Sender vorne rechts G432
Reifendrucküberwachung J502
Sender hinten links G433
Sender hinten rechts G434
event triggered fault tolerant dual wire
Byteflight
optical bus
TTx (in definition)
time triggered fault tol, dependable 2x2 wire
2
4.5
D2B, MOST
token ring optical bus
Airbag J234
Leistungsmodul Scheinwerfer links
J667
Leistungsmodul Scheinwerfer rechts
J668
Automatisches Getriebe J217
Leuchtweitenregelung J431
Elektrische Parkund Handbremse
J540
Niveauregelung J197
Türsteuergerät, Beifahrerseite J387
Türsteuergerät, hinten links J388
Türsteuergerät, hinten rechts J389
Sitzverstellung J136
Sitzverstellung, Beifahrer J521
J723
Wischermotor J400
Sensor für Regen-/ Lichterkennung G397
Innenraumüberwachung
G273
Alarmhorn H12
Frischluftgebläse J126
Geber Kältemitteldruck Kältemitteltemperatur
Türsteuergerät, hinten rechts J389
Anhängererkennung J345
Sitzverstellung J136
Sitzverstellung Beifahrer J521
Einparkhilfe J446
Bordnetz 2 J520
Energiemanagement J644
G395
Sender vorne links
G431
Sender vorne rechts
G432
Sender hinten links
G433
MOST CAN Kombi CAN Diagnose CAN Antrieb CAN Komfort CAN Abstandsregelung LIN diverse Subbussysteme
电脑进行沟通。
熊碧虎
页数: 5
CAN-总线
• 两个电脑——需要有信息的传递——通讯
熊碧虎
页数: 6
CAN-总线
• 如果需要传递信息继续增多,或者电脑也再 继续增多呢?
熊碧虎
页数: 7
CAN-总线
• 这个时候不仅仅要求要有通讯,还要有通讯 的方法。即怎样更合理的通讯
熊碧虎
页数: 8
CAN-总线
汽车数据总线系统的发展
联网的控制器个数(CAN, SUB-CAN, LIN)
45
40
35
30
25
20
15
10
8 er
5
S-Klasse
0
熊碧虎 88 QUELLE: I//EE
90
7 er
92
S-Klasse 7 erC6
C-Klasse E-Klasse
7 er 5 er 3 er
B6
E-Klasse C-Klasse
J285
Diagnoseanschluss T16
NOX Sensor J583
Motorelektronik 1 J623
Türsteuergerät, Fahrerseite J386
Geber für Drehrate
G202
ABS mit EDS J104
Sitzbelegungserkennung J706
Bordnetz J519
Alarmhorn H12
Innenraumüberwachung G273
Komfortelektronik J393
Kältedruck und Kältemitteltemperatur
G395
Multifunktionslenkrad J453
Lenksäulen-elektronik J527
熊碧虎
数据总线终端
收发器(Tranceiver) > 发送器(Transmitter) > 接收器(Receiver)
页数: 28
CAN-总线
熊碧虎
页数: 29
基本构造
CAN-总线
熊碧虎
页数: 30
CAN-总线
4. Canbus采用双绞线自身校验的结构,既可以防止 电磁干扰对传输信息的影响,也可以防止本身对 外界的干扰。系统中采用高低电平两根数据线, 控制器输出的信号同时向两根通讯线发送,高低 电平互为镜像。并且每一个控制器都增加了终端 电阻,已减少数据传送时的过调效应。 Canbus双绞线的基本颜色: Can总线的基本颜色:橙色;Can-Low总是棕色; Can-High:驱动系统(黑色);舒适系统(绿色); 信息系统(紫色);
Anhängererkennung
J345
Lenkwinkelsensor G85
Lenksäulenelektronik J527
熊碧虎
Multifunktionslenkrad J453
Abstandsregelung J428
Sende- und Empfangsgerät für Telefon, R36
Zusatzheizung J364
页数: 21
CAN-总线
熊碧虎
页数: 22
CAN-总线
熊碧虎
页数: 23
CAN-总线
熊碧虎
页数: 24
基本构造
CAN-总线
熊碧虎
页数: 25
CAN-总线
熊碧虎
页数: 26
CAN-总线
• 3. CAN-BUS系统组成:
• CAN收发器: 安装在控制器内部,同时兼具 接受和发送的功能,将控制器传来的数据化 为电信号并将其送入数据传输线。
Energiemanagement
J644
Zusatzheizung J364
Einparkhilfe J446
Bordnetz 2 J520
Zugang- und Startberechtigung
J518
Bordnetz J519
Komfortsystem J393
Climatronic J255
位
状态数
幂指数
计算值
字节
Bit:是二进制数缩写 最小信息单位是1个字位(BIT)