spi 全双工通信
SPI详解
SPI详解
USART、I2C、SPI是常用的三种总线技术。
下面分析SPI总线。
一、技术性能
SPI接口是Motorola 首先提出的全双工三线同步串行外围接口,采用主从模式(Master Slave)架构;支持多slave模式应用,一般仅支持单Master。
时钟由Master控制,在时钟移位脉冲下,数据按位传输,高位在前,低位在后(MSB first);SPI接口有2根单向数据线,为全双工通信,目前应用中的数据速率可达几Mbps的水平。
二、接口定义
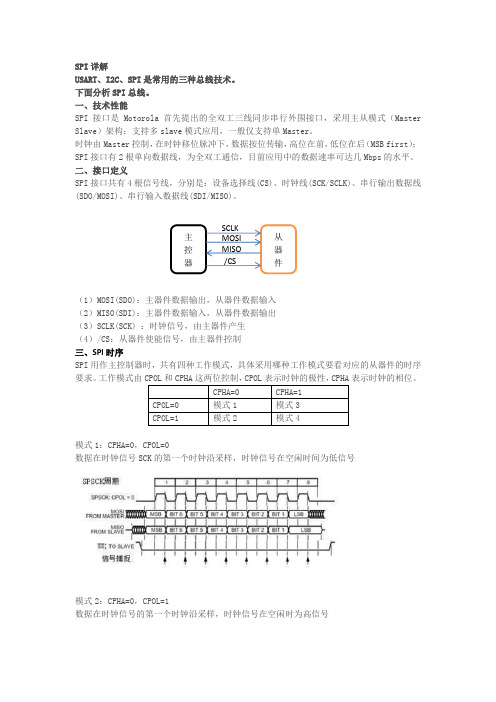
SPI接口共有4根信号线,分别是:设备选择线(CS)、时钟线(SCK/SCLK)、串行输出数据线(SDO/MOSI)、串行输入数据线(SDI/MISO)。
(1)MOSI(SDO):主器件数据输出,从器件数据输入
(2)MISO(SDI):主器件数据输入,从器件数据输出
(3)SCLK(SCK) :时钟信号,由主器件产生
(4)/CS:从器件使能信号,由主器件控制
三、SPI时序
SPI用作主控制器时,共有四种工作模式,具体采用哪种工作模式要看对应的从器件的时序要求。
工作模式由
表示时钟的相位。
模式1:CPHA=0,CPOL=0
数据在时钟信号SCK的第一个时钟沿采样,时钟信号在空闲时间为低信号
模式2:CPHA=0,CPOL=1
数据在时钟信号的第一个时钟沿采样,时钟信号在空闲时为高信号
模式三:CPHA=1,CPOL=0
数据在时钟信号的第二个时钟沿采样,时钟信号在空闲时为低信号
模式四:CPHA=1,CPOL=1
数据在时钟信号的第二个时钟沿采样,时钟信号在空闲时为高信号。
SPI协议解析高速串行通信的协议标准
SPI协议解析高速串行通信的协议标准SPI(Serial Peripheral Interface)是一种高速串行通信协议,被广泛应用于各种数字设备的通信接口传输中。
本文将对SPI协议进行详细解析,介绍其协议标准,以及相关的特性和应用。
I. 介绍SPI协议是一种同步协议,常用于微控制器和外部外设之间的通信。
它通过四根信号线(时钟线、数据线、主从选择线、片选线)实现全双工通信,并且支持多主机和多从机的通信方式。
SPI协议具有高速传输、简单易用、灵活性强等特点,被广泛用于各种应用领域。
II. 协议标准SPI协议的通信规范主要包括以下几个方面:1. 时钟极性与相位SPI协议定义了两种类型的时钟极性和相位设置,分别为CPOL和CPHA。
CPOL用于控制时钟信号的极性,可以是低电平为开始(CPOL=0),或高电平为开始(CPOL=1)。
CPHA用于控制数据采样的时机,可以是时钟信号的上升沿采样(CPHA=0),或下降沿采样(CPHA=1)。
根据不同的设备要求,可以通过组合CPOL和CPHA来实现精确的时序控制。
2. 数据传输顺序SPI协议支持全双工传输,数据通信可以是单向的,也可以是双向的。
数据传输的顺序由设备的主从模式决定,主机先发送数据,然后从机进行响应。
在全双工通信中,数据可以同时双向传输,主机和从机同时发送和接收数据。
3. 主从设备选择SPI协议使用一根主从选择线(SS)来选择通信的主机或从机。
当某个从机被选中时,通过使能该从机的片选线,使其进入工作状态,其他从机则处于非工作状态。
主机可以通过控制主从选择线来选择不同的从机进行通信。
4. 数据帧格式SPI协议的数据传输是以数据帧的形式进行的。
每个数据帧由一个字节(8位)的数据组成,包括发送的数据和接收的数据。
数据帧可以是单向的,也可以是双向的。
5. 传输速率SPI协议支持各种传输速率,可以根据需要进行调整。
传输速率由时钟信号频率决定,可以通过调整时钟频率来达到不同的传输速率。
SPI通信总线接口定义及数据传输流程
SPI通信总线接口定义及数据传输流程SPI是一种高速的、全双工的、同步的通信总线,并且至多仅需使用4根线,节约了芯片的管脚,SPI通信协议主要应用于EEPROM、FLASH、ADC、DAC等芯片,还有数字信号处理器和数字信号解码器之间。
SPI接口无线模块设备之间采用全双工模式通信,是一个主机和一个或者多个从机的主从模式。
主机负责初始化帧,这个数据传输帧可以用于读与写两种操作,片选线可以从多个从机选择一个来响应主机的请求。
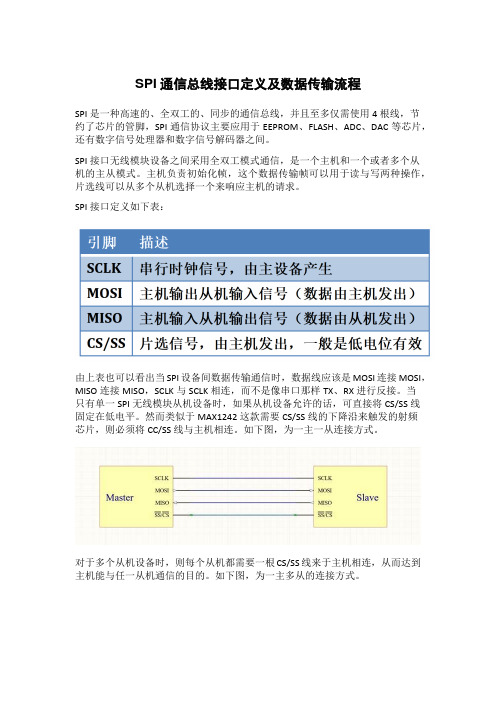
SPI接口定义如下表:由上表也可以看出当SPI设备间数据传输通信时,数据线应该是MOSI连接MOSI,MISO连接MISO,SCLK与SCLK相连,而不是像串口那样TX、RX进行反接。
当只有单一SPI无线模块从机设备时,如果从机设备允许的话,可直接将CS/SS线固定在低电平。
然而类似于MAX1242这款需要CS/SS线的下降沿来触发的射频芯片,则必须将CC/SS线与主机相连。
如下图,为一主一从连接方式。
对于多个从机设备时,则每个从机都需要一根CS/SS线来于主机相连,从而达到主机能与任一从机通信的目的。
如下图,为一主多从的连接方式。
大多数从机设备都有着三态逻辑的特性,因此当设备未被选中时,它们的MISO 信号线会变成高阻抗状态(电气断开)。
没有三态输出的设备则需外接三态缓冲器才能与其他的从机设备共享SPI总线。
数据传输在SPI通信中,SPI主机设备以从机设备支持的频率通过SCLK线给到SPI从机设备,这点也意味着从机是无法主动向主机发送数据的,只能主机轮询向从机发或者从机设备主动通过一个IO口来告知主机数据到达。
在SPI每个时钟周期内,都会进行一次全双工数据的传输。
主机通过MOSI线上发送1bit时,从机也会在读取到之后通过MISO线发送1bit数据出去。
这说明,即使只进行单工通信,也会保持此通信顺序。
SPI传输通常涉及到两个给定了字长的移位寄存器。
例如在主机、从机中的8bit 的移位寄存器。
spi通讯协议
spi通讯协议SPI(Serial Peripheral Interface)是一种同步串行通信协议,常用于连接微控制器和外部设备,如传感器、存储器、显示器等。
它采用主从结构,通过时钟信号和数据线进行双向通信,具有高速传输、简单灵活的特点,广泛应用于各种嵌入式系统。
SPI通信协议使用四根线进行通信:CLK(时钟线)、MOSI (主输出从输入线)、MISO(主输入从输出线)和SS(从选择线)。
时钟线由主设备产生,用于同步数据传输。
MOSI和MISO线负责数据传输,MOSI线由主设备输出数据,MISO线由从设备输出数据。
SS线由主设备控制,用于选择特定的从设备进行通信。
SPI通信协议是一种全双工通信方式,数据可以同时在MOSI和MISO线上传输。
通信过程中,主设备通过产生时钟信号控制数据传输的时序,每个时钟周期传输一个比特位。
主设备将数据送入MOSI线上,并将其与时钟信号同步,从设备通过MISO线上的数据响应主设备。
SPI通信协议中可以有多个从设备存在,但每个从设备都需要一个单独的片选信号控制。
主设备通过拉低某个从设备的片选信号(SS线),来选择特定的从设备进行通信。
通信结束后,主设备释放片选信号,并选择其他从设备进行通信。
这样可以实现多个从设备与一个主设备之间的并行通信。
SPI通信协议的速度可以根据实际需求进行调整,由主设备产生的时钟信号决定了数据传输的速率。
时钟信号的频率可以在主设备中设置,通常可以选择几十kHz至几十MHz的范围。
通信速度越快,数据传输的速率越高,但同时也会增加功耗和干扰的风险。
SPI通信协议具有以下优点:首先,它具有高速传输的优势,可以满足大部分实时性要求较高的应用场景。
其次,SPI通信协议的硬件实现比较简单,可以使用几个GPIO口实现。
最后,SPI通信协议支持全双工通信,可以同时进行数据的发送和接收,提高通信效率。
综上所述,SPI通信协议是一种快速、灵活且简单的串行通信协议,广泛应用于各种嵌入式系统。
spi工作模式

spi工作模式SPI(Serial Peripheral Interface)是一种同步串行数据总线,它是一种简单而高效的通信协议,常用于连接微控制器和外部设备,如传感器、存储器、显示屏等。
SPI工作模式是一种全双工的通信模式,它通过四根线进行通信,包括时钟线(SCLK)、数据输入线(MISO)、数据输出线(MOSI)和片选线(SS)。
SPI工作模式的时序图如下所示:在SPI通信中,主设备负责产生时钟信号,并通过片选线选择从设备。
主设备通过MOSI线发送数据给从设备,在同一时钟周期内,从设备也通过MISO线返回数据给主设备。
因此,SPI是一种全双工的通信方式,能够实现双向数据传输。
SPI通信的速度取决于时钟频率和数据传输的位数。
在SPI工作模式中,时钟信号的频率是可调的,可以根据实际需求进行设置。
一般来说,SPI的时钟频率可以达到几十MHz甚至上百MHz,因此具有较高的数据传输速度。
SPI通信的片选线(SS)用于选择从设备。
在多个从设备的情况下,主设备可以通过片选线选择要和其通信的从设备,其他从设备则处于非选中状态。
这样就可以实现多个从设备和一个主设备之间的通信,提高了系统的灵活性和可扩展性。
SPI通信具有较低的硬件成本,因为它只需要四根线就可以实现双向数据传输。
这使得SPI在嵌入式系统中得到广泛应用,例如单片机和外围设备之间的通信、传感器和控制器之间的数据传输等。
总的来说,SPI工作模式是一种简单而高效的通信方式,具有较高的数据传输速度和较低的硬件成本。
它在嵌入式系统中得到了广泛的应用,为微控制器和外部设备之间的通信提供了一种可靠的解决方案。
希望本文对SPI工作模式有所了解,并能在实际应用中发挥作用。
SPI、I2C接口的定义
SPI、I2C接口的定义1、SPI(Serial Peripheral Interface串行外围接口):高速、全双工、同步串行口。
三或四个信号用于数据交换:SIMO:从进,主出SOMI:从出,主进UCLK:时钟,由主机驱动,从机用它发送和接收数据STE:从机发送允许,用于四线模式中控制多主从系统中的多个从机三线SPI组成:串行时钟(SCLK)、串行数据输出(SDO)、串行数据输入(SDI)。
SPI总线可以实现多个SPI设备互相连接。
提供SPI串行时钟的SPI设备为SPI主机或主设备(Master),其他设备为SPI从机或从设备(Slave)。
主从设备间可以实现全双工通信,当有多个从设备时,还可以增加一条从设备选择线。
四线SPI模式用附加控制线,来允许从机数据的发送和接收,它由主机控制。
SPI接口是在CPU和外围低速器件之间进行同步串行数据传输,在主器件的移位脉冲下,数据按位传输,高位在前,地位在后,为全双工通信。
如果用通用IO口模拟SPI总线,必须要有一个输出口(SDO),一个输入口(SDI),另一个口则视实现的设备类型而定,如果要实现主从设备,则需输入输出口,若只实现主设备,则需输出口即可,若只实现从设备,则只需输入口即可。
UART需要固定的波特率,而SPI则无所谓,因为它是有时钟的协议。
SPI接口主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
2、I2C(Inter IC Bus)接口定义:I2C总线是双向两线(SCL——串行时钟、SDA——串行数据线)制同步串行总线,具有竞争检测和仲裁机制,可使多个主机任意同时发送数据而不破坏总线上的数据信息。
非常适合在器件之间进行近距离、非经常性的数据通信。
在它的协议体系中,传输数据时都会带上目的设备的设备地址,因此可以实现设备组网。
特点:A、每个连到总线上的器件都可由软件唯一的地址寻址,并建立简单的主从关系。
SPI
SPI:串行外设接口(Serial Peripheral Interface)的缩写。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚.I2S(Inter—IC Sound)总线, 又称集成电路内置音频总线,是飞利浦公司为数字音频设备之间的音频数据传输而制定的一种总线标准,该总线专责于音频设备之间的数据传输,广泛应用于各种多媒体系统。
它采用了沿独立的导线传输时钟与数据信号的设计,通过将数据和时钟信号分离,避免了因时差诱发的失真,为用户节省了购买抵抗音频抖动的专业设备的费用。
RM6203是一种渐进式的具有过载和饱和电流防止功能的开关电源,内置800V高压的功率开关管,脉宽调制和脉冲电流检测等电路,仅需要较少的外置元件便可组成典型的反激式开关电源电路,在输入电压为AC85V-265V的情况下,连续输出功率高达12W;在输入电压为AC230V的情况下,连续输出功率高达18W.RM6203的内部基准电压为2.5V,并具有过流,过压和过热保护功能,在负载减轻时会自动降低工作频率,使之具有非常低的待机功耗(低于0.25W),现广泛用于液晶彩显,液晶彩电的开关电源电路中。
该芯片采用DIP8封装,其引脚功能与实测数据见表1,典型应用电路如图1所示。
图1 RM6203PDF应用电路图:表1 RM6203引脚功能及实测数据:引脚符号引脚功能1 OB 启动电阻连2 VCC 供电(5.5V-9V)3 GND 地4 CT 定时电容连接端5 FB 反馈输入端6 IS 电流检测端7,8 OC 输出端,连接开关变压器初级绕组RM6203代换:可用THX203,YT2607直接代换隔离RS-485 电路图2为一个使用光电隔离方式连接的SP485R 芯片的示范电路,可以被直接嵌入实际的RS-485 应用电路中。
微处理器的UART 串口的RXD、TXD 通过光电隔离电路连接SP485R 芯片的RO、DI 引脚,控制信号R/D 同样经光电隔离电路去控制SP485R 芯片的DE和/RE 引脚。
HT46R46 使用 IO Port 进行 SPI 全双工通讯
HT46R46使用I/O Port进行SPI全双工通讯文件编码:HA0151S简介本范例介绍用两片HT46R46 I/O口进行全双工通讯。
•主机(Master)、从机(Slave) 均用HT46R46。
•主机与从机之间仿真SPI串行通讯协议进行全双工通讯。
•由主机控制时钟信号(SCK)、片选信号(CS) 及通信波特率(Baudrate)。
•主机、从机在SCK的上升沿输入(接收) 数据,在SCK下降沿输出(发送) 数据。
•在本Demo程序中,每按下Key键(PD.0) 则主机和从机之间进行一次SPI串行通讯,每次SPI串行通讯完毕主机和从机将收到数据输出至PA口显示。
12主机 (HOST) 硬件方框图图1从机 (SLAVE) 硬件方框图图33 图34软件流程图主机(MASTER) 程序流程图图45从机(SLAVE) 程序流程图图56 SPI_MASTER_TO_SLAVE 子程序流程图图67 SPI_SLAVE_TO_ MASTER 子程序流程图8 程序流程说明• Power On 后,主机 (Master) 与从机 (Slave)分别进行初始化设置,SPI 串行通讯由主机发起,从机响应主机进行仿真SPI 协议的全双工通讯。
•本Demo 程序中,按下Key 键 (PD.0),则主机发起SPI 串行通讯,由主机控制片选信号(CS),通讯时钟信号 (CLK),从机判断接收CS 和CLK 信号来对主机进行响应。
• 在SPI 串行通讯中,主机和从机在SCK 的上升沿输入,将各自SDI 信号线上接收到的数据写入READ_RAM 中;主机和从机在SCK 的下降沿输出,将各自WRITE_RAM 中的数据输出到SDO 信号线上,每个SCK 时钟周期仿真1位数据的输入输出,依此循环8次,即完成1次SPI 串行通讯传输8位数据的操作。
• 程序中可选择数据传输顺序先由LSB 开始或先由MSB 开始。
• 本Demo 程序中,每完成一次SPI 串行通讯,主机和从机将各自收到的数据输出到PA 口进行显示,然后等待下一次SPI 串行通讯开始。
SPI协议串行外设接口协议的特点与使用

SPI协议串行外设接口协议的特点与使用SPI(Serial Peripheral Interface)协议是一种串行外设接口协议,广泛应用于数字通信、嵌入式系统和电子设备等领域。
本文将重点介绍SPI协议的特点和使用方法。
一、SPI协议的特点SPI协议具有以下几个特点:1. 高速全双工传输:SPI协议支持全双工通信,主设备和从设备可以同时进行收发数据,提供了高效的数据传输能力。
2. 多设备串联:SPI协议支持多个从设备与一个主设备之间的串联连接。
每个从设备都有一个片选信号,主设备通过控制片选信号来选择与之通信的从设备,从而支持与多个从设备的通信。
3. 硬件实现简单:SPI协议的实现只需要少量的硬件资源,常用的器件如微控制器、存储器、传感器等晶片都具备SPI接口,这使得SPI 协议应用非常广泛。
4. 高灵活性的传输模式:SPI协议支持多种传输模式,可以通过调整时钟极性(CPOL)和时钟相位(CPHA)来配置传输模式。
这使得SPI协议可以适应不同的连接设备和通信要求。
5. 简单可靠的通信协议:SPI协议的通信方式相对简单,在时序控制方面具有可靠性和稳定性,能够保证数据的可靠传输。
二、SPI协议的使用方法在使用SPI协议时,需要注意以下几个步骤:1. 确定SPI主从模式:在SPI通信中,需要确定主设备和从设备的角色。
主设备负责发起通信,并控制片选信号选择与之通信的从设备;从设备则根据主设备的指令响应数据。
2. 配置时钟频率和传输模式:根据从设备的要求或通信距离,可以设置合适的时钟频率和传输模式。
时钟频率决定了SPI通信的速度,而传输模式则决定了数据采样和发送的时机。
3. 设置数据格式:SPI协议支持多种数据格式,包括位数、数据字节序等。
根据具体设备的要求,设置合适的数据格式以确保正确的数据传输。
4. 控制片选信号:SPI协议通过片选信号来选择与之通信的从设备。
在通信过程中,主设备通过控制片选信号来选择某个从设备进行通信,其他从设备则保持不选中状态。
spi接口协议
spi接口协议SPI接口协议。
SPI(Serial Peripheral Interface)是一种同步串行数据接口标准,用于在数字集成电路之间进行通信。
SPI接口协议最初由Motorola公司开发,后来得到了广泛的应用和推广,成为了一种常见的通信协议。
SPI接口协议主要用于在嵌入式系统中连接微控制器和外围设备,如存储器芯片、传感器、显示器等。
SPI接口协议的特点之一是它是一种全双工通信协议,意味着数据可以同时在两个方向上传输。
它还采用了主从式的通信方式,一个主设备可以控制多个从设备,这使得SPI接口协议在多设备通信时表现出色。
此外,SPI接口协议的通信速度较快,可以达到几十MHz甚至上百MHz,适用于高速数据传输的场景。
SPI接口协议的硬件连接通常由四条线构成,时钟线(SCLK)、主设备输出从设备输入线(MOSI)、主设备输入从设备输出线(MISO)和片选线(SS)。
时钟线用于同步数据传输,主设备通过时钟线向从设备发送时钟信号,从而控制数据传输的速度。
MOSI和MISO分别用于主设备向从设备发送数据和从设备向主设备发送数据。
片选线用于选择需要进行通信的从设备,每个从设备都有一个对应的片选线。
在SPI接口协议中,数据的传输是以字节为单位进行的。
主设备通过向从设备发送数据来触发从设备的响应,从而进行数据交换。
SPI接口协议的通信过程可以分为四个阶段,片选、传输、接收和解选。
首先,主设备通过片选线选择需要进行通信的从设备;然后,在时钟的控制下,主设备向从设备发送数据,并同时接收从设备发送的数据;最后,主设备通过解选线将从设备解选,结束本次通信。
SPI接口协议的应用非常广泛,特别是在嵌入式系统中。
由于其高速、全双工和多设备通信的特点,SPI接口协议被广泛应用于存储器、传感器、显示器、通信模块等外围设备的连接。
在一些对通信速度要求较高的场景,SPI接口协议的优势尤为明显。
总的来说,SPI接口协议是一种简单而高效的通信协议,适用于在数字集成电路之间进行数据交换。
SPI
SPISPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,如今越来越多的芯片集成了这种通信协议,比如AT91RM9200。
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。
也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)。
(1)SDO –主设备数据输出,从设备数据输入(2)SDI –主设备数据输入,从设备数据输出(3)SCLK –时钟信号,由主设备产生(4)CS –从设备使能信号,由主设备控制其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。
这就允许在同一总线上连接多个SPI设备成为可能。
接下来就负责通讯的3根线了。
通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。
这就是SCK时钟线存在的原因,由SCK提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。
数据输出通过SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。
完成一位数据传输,输入也使用同样原理。
这样,在至少8次时钟信号的改变(上沿和下沿为一次),就可以完成8位数据的传输。
要注意的是,SCK信号线只由主设备控制,从设备不能控制信号线。
同样,在一个基于SPI的设备中,至少有一个主控设备。
这样传输的特点:这样的传输方式有一个优点,与普通的串行通讯不同,普通的串行通讯一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。
也就是说,主设备通过对SCK时钟线的控制可以完成对通讯的控制。
通用SPI的一般应用讲义
SPI为从模式数据接收过程
对于接收器,当数据接收完成时: 移位寄存器中的数据传送到接收缓冲器, SPI_SR 寄存器中的RXNE标志被设置。 如果设置了SPI_CR2寄存器中的RXNEIE位,则 产生中断。 在最后一个采样时钟边沿后,RXNE位被置’1’, 移位寄存器中接收到的数据字节被传送到接收 缓冲器。当读SPI_DR寄存器时,SPI设备返回 这个接收缓冲器的数值。 读SPI_DR寄存器时,RXNE位被清除。
SPI为从模式数据发送过程
在写操作中,数据字被并行地写入发送缓冲器。 当从设备收到时钟信号,并且在MOSI引脚上出现第一 个数据位时,发送过程开始(此时第一个位被发送出去)。 余下的位(对于8位数据帧格式,还有7位;对于16位数 据帧格式,还有15位)被装进移位寄存器。当发送缓冲 器中的数据传输到移位寄存器时,SPI_SP寄存器的 TXE标志被设置,如果设置了SPI_CR2寄存器的TXEIE 位,将会产生中断。
配置SPI为主模式
配置步骤 1. 通过SPI_CR1寄存器的BR[2:0]位定义串行时钟波特率。 2. 选择CPOL和CPHA位,定义数据传输和串行时钟间的相位关系(见图 212)。 3. 设置DFF位来定义8位或16位数据帧格式。 4. 配置SPI_CR1寄存器的LSBFIRST位定义帧格式。 5. 如果需要NSS引脚工作在输入模式,硬件模式下,在整个数据帧传输 期间应把NSS脚连接到高电平;在软件模式下,需设置SPI_CR1寄存器 的SSM位和SSI位。如果NSS引脚工作在输出模式,则只需设置SSOE位。 6. 必须设置MSTR位和SPE位(只当NSS脚被连到高电平,这些位才能保 持置位)。 在这个配置中,MOSI引脚是数据输出,而MISO引脚是数据输入。
SPI总线协议介绍
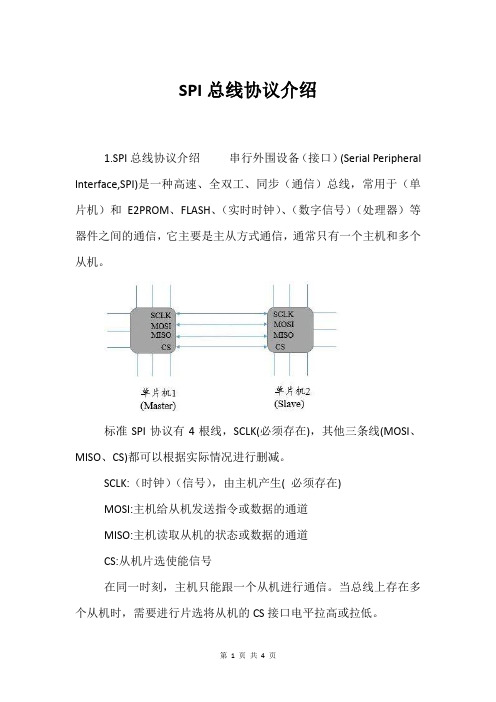
SPI总线协议介绍1.SPI总线协议介绍串行外围设备(接口)(Serial Peripheral Interface,SPI)是一种高速、全双工、同步(通信)总线,常用于(单片机)和E2PROM、FLASH、(实时时钟)、(数字信号)(处理器)等器件之间的通信,它主要是主从方式通信,通常只有一个主机和多个从机。
标准SPI协议有4根线,SCLK(必须存在),其他三条线(MOSI、MISO、CS)都可以根据实际情况进行删减。
SCLK:(时钟)(信号),由主机产生( 必须存在)MOSI:主机给从机发送指令或数据的通道MISO:主机读取从机的状态或数据的通道CS:从机片选使能信号在同一时刻,主机只能跟一个从机进行通信。
当总线上存在多个从机时,需要进行片选将从机的CS接口电平拉高或拉低。
2.SPI总线寻址模式SPI协议和(I2C)协议一样,数据是从高位到低位依次发送,SPI协议中SCLK在空闲时可以是高电平也可以是低电平。
下面以空闲时,SCLK为高电平举例。
当SCLK出现下降沿即从高电平跳到低电平时,进行数据输出;当SCLK出现上升沿即从低电平跳到高电平时,进行数据采样。
SPI总线寻址模式和I2C协议相比,SPI协议没有开始位、停止位、应答位,规则上简单很多。
SPI协议中SCLK在空闲时可以是高电平也可以是低电平,这其实反映了时钟的极性。
上图中,CPOL=1,CPHA=1 。
CPOL时钟极性:CPOL=0,SCLK空闲时状态为低电平CPOL=1,SCLK空闲时状态为高电平时钟的相位:它决定了什么时候进行数据输出,什么时候进行数据采样。
CPHA时钟相位:CPHA=0,每个周期的第一个跳变沿进行数据采样CPHA=1,每个周期的第一个跳变沿进行数据输出。
SPI通信协议(SPI总线)学习
SPI通信协议(SPI总线)学习
SPI(Serial Peripheral Interface)是一种同步的、全双工的通信总线,常用于连接微
控制器和外围设备。
SPI总线的通信协议相对简单,有四根信号线组成:SCLK(时钟
信号)、MOSI(主机输出从机输入信号)、MISO(主机输入从机输出信号)和SS (片选信号)。
SPI总线的工作方式如下:
1. 选择从机:主机通过将片选信号(SS)置低来选择要通信的从机。
通常每个从机都
有独立的片选线。
2. 时钟信号:主机通过时钟信号(SCLK)提供同步时钟给从机,控制数据传输的时钟周期。
3. 主机输出从机输入:主机将要发送给从机的数据通过主机输出从机输入信号(MOSI)发送给从机。
数据按照时钟的上升沿或下降沿传输。
4. 主机输入从机输出:从机将要发送给主机的数据通过主机输入从机输出信号(MISO)传输给主机。
数据按照时钟的上升沿或下降沿传输。
5. 数据传输顺序:数据传输是基于时钟信号的,每个时钟周期传输一个位。
主机和从
机按照特定的数据传输格式进行通信,可以是先传输最高有效位(MSB)或最低有效
位(LSB)。
6. 数据传输模式:SPI总线支持多种数据传输模式,如模式0、模式1、模式2和模式3,不同模式下时钟信号和数据传输的相位和极性不同。
7. 传输完成:主机通过将片选信号(SS)置高来结束通信。
SPI总线的优点是简单、高速、低成本,适用于连接多种外设,如传感器、存储器、显示器等。
然而,SPI总线并没有提供错误检测和纠正机制,需要通过其他方式保证数据的可靠性。
spi通信原理
spi通信原理SPI通信原理。
SPI(Serial Peripheral Interface)是一种全双工的通信协议,通常用于在微控制器和外围设备之间进行数据传输。
它是一种同步串行通信协议,通过四根线进行通信,包括一个主设备和一个或多个从设备。
SPI通信协议在许多嵌入式系统中被广泛应用,因为它具有高速传输、简单的硬件连接和灵活的通信方式等优点。
SPI通信的原理非常简单,主要包括时钟信号、数据输入、数据输出和片选信号等几个关键部分。
下面我们将逐一介绍SPI通信的原理和工作方式。
首先,SPI通信协议是一种同步通信协议,它需要一个时钟信号来同步主设备和从设备之间的数据传输。
时钟信号由主设备产生,并且在数据传输的过程中始终保持稳定。
这样可以确保数据在传输过程中不会出现错误,保证通信的可靠性和稳定性。
其次,SPI通信需要同时进行数据输入和数据输出。
主设备通过数据输入线向从设备发送数据,同时从设备通过数据输出线向主设备返回数据。
这种全双工的通信方式可以实现数据的双向传输,提高了通信效率和灵活性。
另外,SPI通信中还包括片选信号。
片选信号用于选择需要进行通信的从设备,当主设备需要与某个从设备进行通信时,它会将该从设备的片选信号拉低,表示开始通信;通信结束后,片选信号会被拉高,表示通信结束。
通过片选信号,可以实现主设备与多个从设备之间的独立通信,提高了系统的可扩展性。
最后,SPI通信协议的工作方式非常灵活。
它可以通过软件和硬件来实现,主设备和从设备之间的通信速率、数据格式和传输模式等都可以根据实际需求进行配置和调整。
这使得SPI通信协议适用于各种不同的应用场景,包括存储器、传感器、显示器等多种外围设备。
总的来说,SPI通信协议是一种简单、高效、灵活的通信方式,它在许多嵌入式系统中得到广泛应用。
通过理解SPI通信的原理和工作方式,我们可以更好地设计和应用SPI接口的外围设备,提高系统的性能和可靠性。
希望本文对您理解SPI通信原理有所帮助,如果您对SPI通信协议还有其他疑问,欢迎留言讨论。
Verilog--SPI协议
Verilog--SPI协议Verilog -- SPI协议简介SPI是⼀种全双⼯通信,并且是⼀种同步传输⽅式(slave的接收clk需要master给出)SPI总线是⼀种4线总线,因其硬件功能很强,所以与SPI有关的软件就相当简单,使中央处理器(Central Processing Unit,CPU)有更多的时间处理其他事务。
正是因为这种简单易⽤的特性,越来越多的芯⽚集成了这种通信协议,⽐如AT91RM9200。
SPI是⼀种⾼速、⾼效率的串⾏接⼝技术。
通常由⼀个主模块和⼀个或多个从模块组成,主模块选择⼀个从模块进⾏同步通信,从⽽完成数据的交换。
SPI是⼀个环形结构,通信时需要⾄少4根线(事实上在单向传输时3根线也可以)。
SPI的通信原理很简单,它以主从⽅式⼯作,这种模式通常有⼀个主设备和⼀个或多个从设备,需要⾄少4根线,事实上3根也可以(单向传输时)。
也是所有基于SPI的设备共有的,它们是MISO(主设备数据输⼊)、MOSI(主设备数据输出)、SCLK(时钟)、CS(⽚选)。
(1)MISO– Master Input Slave Output,主设备数据输⼊,从设备数据输出;(2)MOSI– Master Output Slave Input,主设备数据输出,从设备数据输⼊;(3)SCLK – Serial Clock,时钟信号,由主设备产⽣;(4)CS – Chip Select,从设备使能信号,由主设备控制。
其中,CS是从芯⽚是否被主芯⽚选中的控制信号,也就是说只有⽚选信号为预先规定的使能信号时(⾼电位或低电位),主芯⽚对此从芯⽚的操作才有效。
这就使在同⼀条总线上连接多个SPI设备成为可能。
(以上来⾃百度百科)SPI最⼤传输速率SPI是⼀种事实标准,由Motorola开发,并没有⼀个官⽅标准。
已知的有的器件SPI已达到50Mbps。
具体到产品中SPI的速率主要看主从器件SPI控制器的性能限制。
spi协议及工作原理分析

spi协议及工作原理分析SPI(Serial Peripheral Interface)串行外设接口是一种用于在微控制器和外部设备之间进行通信的协议。
它在许多嵌入式系统中被广泛应用,例如存储器芯片、传感器、显示屏、无线模块等。
本文将介绍SPI协议的基本原理和工作方式。
一、SPI协议概述SPI是一种同步的协议,它使用全双工通信方式,数据的传输是通过时钟信号进行同步。
SPI协议要求系统中至少有一个主设备(Master),以及一个或多个从设备(Slave)。
主设备负责发起数据传输请求,从设备负责响应请求并传输数据。
二、SPI协议的硬件连接SPI协议一般使用四根线进行连接:时钟线(SCLK)、主设备输出线(Master Out Slave In,MOSI)、主设备输入线(Master In Slave Out,MISO)和片选线(SS)。
1. SCLK(时钟线):主设备通过时钟线产生时钟信号,作为数据传输的时间基准。
2. MOSI(主设备输出线):主设备通过此线将数据发送给从设备。
3. MISO(主设备输入线):从设备通过此线将数据发送给主设备。
4. SS(片选线):用于选择对应的从设备。
在传输数据之前,主设备需要通过拉低该线来选择从设备;当传输结束后,主设备会释放该线。
三、SPI协议的工作过程SPI协议的工作过程可以分为四个阶段:时钟极性(CPOL)、时钟相位(CPHA)、传输顺序和数据帧。
1. 时钟极性(CPOL):指定时钟信号的空闲状态是高电平还是低电平。
在不同的设备中,时钟极性可能有不同的定义,一般有两种方式。
当CPOL为0时,表示空闲状态时钟为低电平;当CPOL为1时,表示空闲状态时钟为高电平。
2. 时钟相位(CPHA):指定数据采样的时机。
同样有两种定义方式。
当CPHA为0时,数据在时钟信号的上升沿采样;当CPHA为1时,数据在时钟信号的下降沿采样。
3. 传输顺序:SPI协议一般采用全双工通信方式进行数据传输,即主设备同时发出数据并接收从设备的数据。
GPIO和SPI
GPIO和SPI1. 综述:GPIO 和 SPI 都是嵌⼊式智能设备最常⽤的外设接⼝。
2.GPIO GPIO,英⽂全称为General-Purpose IO ports,也就是通⽤IO⼝。
在嵌⼊式系统中常常有数量众多,但是结构却⽐较简单的外部设备/电路,对这些设备/电路有的需要CPU为之提供控制⼿段,有的则需要被CPU⽤作输⼊信号。
⽽且,许多这样的设备/电路只要求⼀位,即只要有开/关两种状态就够了,⽐如灯亮与灭。
对这些设备/电路的控制,使⽤传统的串⾏⼝或并⾏⼝都不合适。
所以在微控制器芯⽚上⼀般都会提供⼀个“通⽤可编程IO接⼝”,即GPIO。
接⼝⾄少有两个寄存器,即“通⽤IO控制寄存器”与“通⽤IO数据寄存器”。
数据寄存器的各位都直接引到芯⽚外部,⽽对这种寄存器中每⼀位的作⽤,即每⼀位的信号流通⽅向,则可以通过控制寄存器中对应位独⽴的加以设置。
这样,有⽆GPIO接⼝也就成为微控制器区别于微处理器的⼀个特征。
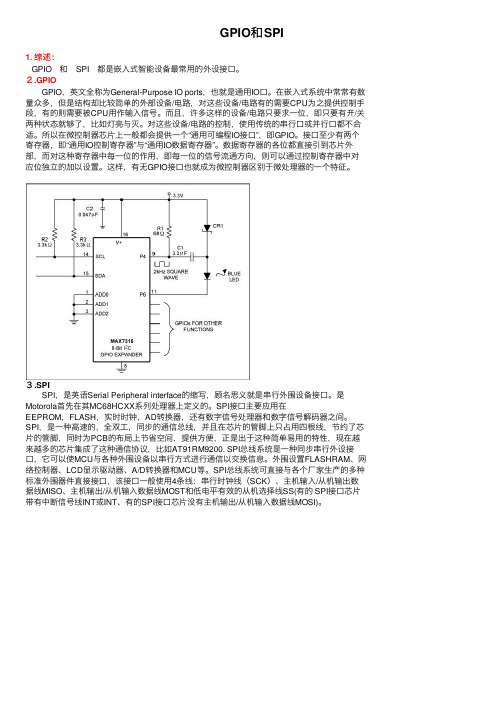
3.SPI SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串⾏外围设备接⼝。
是Motorola⾸先在其MC68HCXX系列处理器上定义的。
SPI接⼝主要应⽤在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI,是⼀种⾼速的,全双⼯,同步的通信总线,并且在芯⽚的管脚上只占⽤四根线,节约了芯⽚的管脚,同时为PCB的布局上节省空间,提供⽅便,正是出于这种简单易⽤的特性,现在越来越多的芯⽚集成了这种通信协议,⽐如AT91RM9200. SPI总线系统是⼀种同步串⾏外设接⼝,它可以使MCU与各种外围设备以串⾏⽅式进⾏通信以交换信息。
外围设置FLASHRAM、⽹络控制器、LCD显⽰驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个⼚家⽣产的多种标准外围器件直接接⼝,该接⼝⼀般使⽤4条线:串⾏时钟线(SCK)、主机输⼊/从机输出数据线MISO、主机输出/从机输⼊数据线MOST和低电平有效的从机选择线SS(有的 SPI接⼝芯⽚带有中断信号线INT或INT、有的SPI接⼝芯⽚没有主机输出/从机输⼊数据线MOSI)。
使用模拟口进行SPI全双工通信
HT46R46 使用 I/O Port 進行 SPI 全雙工通訊
SPI_SLAVE_TO_ MASTER 子程式流程圖
圖7 7
HT46R46 使用 I/O Port 進行 SPI 全雙工通訊
程式流程説明 • Power On 後,主機 (Master) 與從機 (Slave) 分別進行初始化設置,SPI 串列通訊由主機發
HT46R46 使用 I/O Port 進行 SPI 全雙工通訊
HT46R46 使用 I/O Port 進行 SPI 全雙工通訊
文件編碼:HA0151T
簡介
本範例介紹用兩片 HT46R46 I/O 口進行全雙工通訊。
• 主機 (Master)、從機 (Slave) 均用 HT46R46。 • 主機與從機之間模擬 SPI 串列通訊協議進行全雙工通訊。 • 由主機控制時鐘信號 (SCK)、片選信號 (CS) 及通信串列傳輸速率 (Baudrate)。 • 主機、從機在 SCK 的上升緣輸入 (接收) 數據,在 SCK 下降緣輸出 (發送) 數據。 • 在本 Demo 程式中,每按下 Key 鍵 (PD.0) 則主機和從機之間進行一次 SPI 串列通訊,每
軟體流程圖
主機 (MASTER) 程式流程圖
HT46R46 使用 I/O Port 進行 SPI 全雙工通訊
圖4
4
從機 (SLAVE) 程式流程圖
HT46R46 使用 I/O Port 進行 SPI 全雙工通訊
圖5 5
HT46R46 使用 I/O Port 進行 SPI 全雙工通訊
SPI_MASTER_TO_SLAVE 子程式流程圖
• 同理,當 C_BaudRate=52 時,通訊傳輸速率即為 9600。若條件改變則串列傳輸速率設置
SPI通信方式
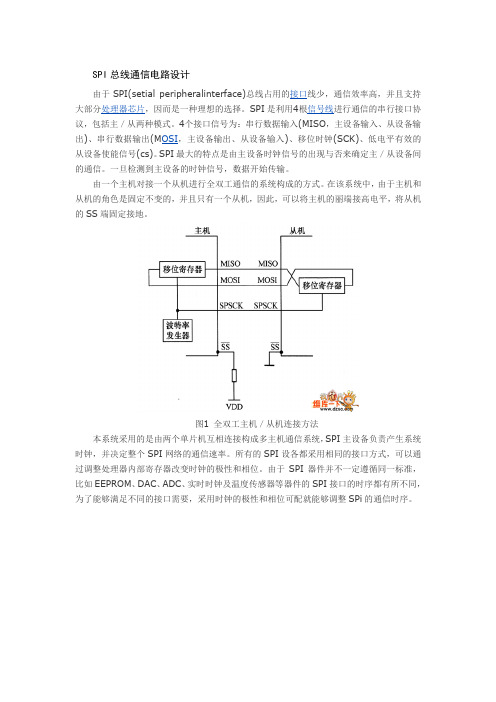
SPI总线通信电路设计由于SPI(setial peripheralinterface)总线占用的接口线少,通信效率高,并且支持大部分处理器芯片,因而是一种理想的选择。
SPI是利用4根信号线进行通信的串行接口协议,包括主/从两种模式。
4个接口信号为:串行数据输入(MISO,主设备输入、从设备输出)、串行数据输出(M OSI,主设备输出、从设备输入)、移位时钟(SCK)、低电平有效的从设备使能信号(cs)。
SPI最大的特点是由主设备时钟信号的出现与否来确定主/从设备间的通信。
一旦检测到主设备的时钟信号,数据开始传输。
由一个主机对接一个从机进行全双工通信的系统构成的方式。
在该系统中,由于主机和从机的角色是固定不变的,并且只有一个从机,因此,可以将主机的丽端接高电平,将从机的SS端固定接地。
图1 全双工主机/从机连接方法本系统采用的是由两个单片机互相连接构成多主机通信系统,SPI主设备负责产生系统时钟,并决定整个SPI网络的通信速率。
所有的SPI设各都采用相同的接口方式,可以通过调整处理器内部寄存器改变时钟的极性和相位。
由于SPI器件并不一定遵循同一标准,比如EEPROM、DAC、ADC、实时时钟及温度传感器等器件的SPI接口的时序都有所不同,为了能够满足不同的接口需要,采用时钟的极性和相位可配就能够调整SPi的通信时序。
SPI设各传输数据过程中总是先发送或接收高字节数据,每个时钟周期接收器或收发器左移1位数据。
对于小于16位的数据在发送之前必须左对齐,如果接收的数据小于16位则采用软件将无效的数据位屏蔽,当主机发送一个连续的数据流时,有些外设能够进行多字节传输。
多数具有SPI接口的存储芯片就以这种方式工作。
在这种传输方式下,从机的片选端必须在整个传输过程中保持低电平。
此时,一次传输可能会涉及到成千上万字节的信息,而不必在每个字节的数据发送的前后都去检测其起始位和结束位,这正是同步传输方式优于异步传输方式的原因所在。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
【转自互联网,感觉写的不错,特拿来分享】
本人的一个SPI的实例,通过SPI实现两机通讯,采用中断方式实现双全工通讯。
本例用两MEGA8515实现,连接为:
MISO----MISO
MOSI----MOSI
SCK ----SCK
/SS ----/SS
将要发送的数据加载到发送缓冲区的函数fill_tx_buffer和从接收缓冲区读出数据的函数read_rx_buffer未给出,根据各自需求请自己完成。
#define SPI_RX_BUFFER_SIZE 10
#define SPI_RX_BUFFER_MASK ( SPI_RX_BUFFER_SIZE - 1 )
#define SPI_TX_BUFFER_SIZE 10
#define SPI_TX_BUFFER_MASK ( SPI_TX_BUFFER_SIZE - 1 )
#define SET_SPI_MODE PORTB.4
#define SPI_MODE PINB.4
static unsigned char SPI_RxBuf[SPI_RX_BUFFER_SIZE];
static volatile unsigned char SPI_RxHead;
static unsigned char SPI_TxBuf[SPI_TX_BUFFER_SIZE];
static volatile unsigned char SPI_TxHead;
//******************************************
// SPI中断服务程序
//******************************************
interrupt [SPI_STC] void spi_isr(void)
{
unsigned char data;
if(spi_m==0) //如果spi_m为0,表明是接收状态
{
data = SPDR; //读入接受到的数据
SPI_RxBuf[SPI_RxHead-1] = data; //将接收到的数据存入接收缓存区
if ( SPI_RxHead == SPI_RX_BUFFER_MASK ) //如果是接收帧的最后一个数据 {
SPI_RxHead = 0; //已接收数据还原
MSTR=1; //接收完成,将SPI设回主方式
spi_trans_com=1; //置接收完成标志
}
else
{
SPI_RxHead++; //已接收数据计数器加1
}
}
else //如果spi_m为1,表明是发送状态
{
if ( SPI_TxHead <= SPI_TX_BUFFER_MASK) //如果要发送的数据还未全部发完 {
SPDR = SPI_TxBuf[SPI_TxHead]; //从发送缓存区取数发送SPI_TxHead++; //已发送数据计数器加1
}
else //如果要发送的数据已全部发完
{
SPI_TxHead=0; //已发送数据计数器还原
DDRB.4=0;
SET_SPI_MODE=1; //释放总线,以便接收方进入主发送。
spi_m=0;
spi_sending=0; //清空发送中标记
}
}
}
//******************************************
// SPI初始化
//******************************************
void Init SPI(void)
{
SPCR=0x52;
SPI_RxHead = 0;
SPI_TxHead = 0;
}
//******************************************
//发送数据
//******************************************
void spi_send(void)
{
if(spi_sending==0) //发送中标记为0,表明spi发送空闲
{
fill_tx_buffer(); //调用fill_tx_buffer函数,将要发送的数据加载到发送缓冲区 while(PINB.4==0) //如果PINB.4为低,表明总线被接受方占用,等待直至接受方发送完成。
{;}
Init SPI(); //初始化spi为主方式
DDRB.4=1;
SET_SPI_MODE=0; //将PORTB.4拉低,强迫接收方进入从接收方式
spi_m=1; //置spi_m标志表明为发送状态
delay_us(10);
spi_sending=1; //置spi_sending标志表明发送进行中
SPDR=0xFF; //开始发送,接收方接收到的第一个数据为0xFF应忽略
SPI E=1; //开SPI中断,
SPI_TxHead = 0; //已发送数据计数器清0
}
}
void main(void)
{
...
while(1)
{
...
if(spi_trans_com==1) //如果接收完成标志为1,表明有所数据已接收
{
read_rx_buffer(); //调用read_rx_buffer函数,将接收到的数据从接收缓冲区读出 spi_trans_com=0; //读完清除接收完成标志
}
...
}
}。