立体仓库巷道式堆垛机设计精编版
巷道堆垛类自动化立体车库(论文+DWG图纸)

巷道堆垛类⾃动化⽴体车库(论⽂+DWG图纸)第 1 章绪论1.1课题的来源、⽬的及意义近年来,随着经济的发展,我国的城市化⽔平加快和⼈民⽣活⽔平的提⾼,汽车的数量不断增加。
截⾄2003年底,我国个⼈汽车保有量为12427672辆。
其中,个⼈轿车4890387辆,⽐2002年增加1462441辆,增长率为42.7%。
但与此同时,汽车停车场地的增长却不能与之同步,汽车泊位与汽车数量严重⽐例失调,由此带来停车难,违章停车,停车管理困难等⼀系列问题。
机械式⽴体停车设备⼜名⽴体车库,它占地空间⼩,并且可以最⼤限度的利⽤空间,安全⽅便,是解决城市⽤地紧张,缓解停车难的⼀个有效⼿段。
国家记委已明确机械⽴体停车设备及城市⽴体停车场为国家重点⽀持的产业。
1998年1⽉1⽇起执⾏的《国家记委6号令》把机械式⽴体车库和⽴体停车场列⼊“国家重点⿎励发展的产业,产品和技术”。
国家海关总署对机械式停车产品规定“国内投资项⽬给予免征进⼝税”。
上述措施为我国⽴体车库产业的成长提供了良好的条件,也为我国解决城市停车问题提供了机会。
可以预见:⽴体车库具有⼴阔的市场前景。
研究的⽬的就是开发⼀套实⽤,安全有效的垂直升降式停车设备,并进⾏相应的扩展研究。
本项⽬的研究与开发,为21世纪初期的城市交通系统提供实⽤的,具有⾃主知识产权,国产化城市停车技术和装备,对缓解城市⽤地紧张,解决城市停车难的问题具有重要意义。
1.2机械式⽴体停车库的概述使⽤车辆之外其他具有动⼒的搬运器,完成车辆的停放,存贮的整套设备,称为机械停车库。
以⽴体形式停放,存储车辆的机械设备叫机械式⽴体停车库。
它包含了当前机械,光学,电⼦,液压,磁控技术领域的成熟先进技术,是⼀种技术密集型的光机电⼀体化设备。
在中华⼈民共和国机械⾏业标准JB/T 8713-1998 :机械式停车设备类别、形式、基本参数要⽬中,对机械式停车设备进⾏了划分,其类别代号如下:升降横移类,代号为SH,是指通过设备的垂直升降和⽔平横移进⾏移动,实现车辆存取功能的停车设备。
自动化立体仓库堆垛机的设计

自动化立体仓库堆垛机的设计一、引言自动化立体仓库堆垛机是一种高效的物流设备,用于自动化存储和取货。
本文将详细介绍自动化立体仓库堆垛机的设计,包括机械结构设计、控制系统设计和安全性考虑等方面。
二、机械结构设计1. 设备选型根据仓库的规模和需求,选择适合的自动化立体仓库堆垛机型号。
考虑到货物种类和重量,选择具有足够承载能力和灵活性的堆垛机。
2. 升降系统设计设计堆垛机的升降系统,包括升降机构和升降驱动装置。
采用电动升降机构,配备高效的电动驱动装置,确保升降过程平稳可靠。
3. 运动系统设计设计堆垛机的运动系统,包括水平运动和垂直运动。
采用精密的导轨和滚珠丝杠传动装置,确保运动过程准确无误。
4. 夹具设计设计适用于不同货物的夹具,确保货物在堆垛过程中的稳定性和安全性。
夹具应具有可调节的夹持力,以适应不同尺寸和重量的货物。
三、控制系统设计1. 控制方式选择选择合适的控制方式,可以采用PLC控制或者计算机控制。
根据实际需求,考虑控制精度、响应速度和可靠性等因素进行选择。
2. 控制算法设计设计堆垛机的控制算法,包括定位算法、路径规划算法和运动控制算法。
确保堆垛机能够准确、高效地完成存储和取货任务。
3. 传感器选择选择合适的传感器,用于感知货物位置、高度和夹具状态等信息。
常用的传感器包括光电传感器、压力传感器和位移传感器等。
四、安全性考虑1. 安全装置设计设计安全装置,包括急停按钮、防撞装置和防坠装置等。
确保在紧急情况下能够及时停止堆垛机的运动,并防止碰撞和坠落等意外事故的发生。
2. 安全控制策略制定安全控制策略,包括限制堆垛机的最大速度和加速度,以及设置安全区域和安全距离等。
确保堆垛机在操作过程中不会对人员和设备造成伤害。
3. 安全培训和操作规范对操作人员进行安全培训,传授正确的操作方法和注意事项。
制定操作规范,明确操作流程和安全要求,提高操作人员的安全意识和技能。
五、结论自动化立体仓库堆垛机的设计涉及机械结构设计、控制系统设计和安全性考虑等方面。
(完整版)自动化立体仓总体设计规范

青岛科捷自动立体仓库项目总体设计说明编号:版本:01页码:第 1 页共 19 页1 自动立体仓库项目总体设计说明二零一五年五月目录一、概述 (3)1、适用范围 (3)2、应用标准 (3)二、总体设计内容概括 (4)三、系统推荐参数 (5)1、货架系统与堆垛机推荐参数 (5)1.1单深位货架正立面示意简图及相关尺寸推荐参数: (5)1.2单深位货架侧立面示意简图及相关尺寸推荐参数: (7)1.3双深位货架侧立面示意简图及相关尺寸推荐参数: (8)1.4运动设备与相邻构件或建筑物间的安全距离: (9)1.5堆垛机相关参数: (10)1.6货架基础相关参数: (11)2、托盘在立体仓库推荐参数 (11)2.1钢质托盘相关尺寸推荐参数 (11)2.2托盘设计注意事项 (12)2.3托盘或货物检测相关 (13)3、输送系统在立体仓库推荐参数 (14)3.1系统布局相关尺寸及推荐参数 (14)3.2滚筒输送机布局相关尺寸推荐参数 (15)3.3链条输送机布局相关尺寸推荐参数: (16)3.4顶升移栽机布局相关尺寸推荐参数: (17)3.5穿梭车布局相关尺寸推荐参数: (17)一、概述1、适用范围本总体设计说明适用于由钢结构分离式货架、有轨巷道堆垛机、平面输送设备等构成的自动化立体仓库,并且以贮存托盘单元货物为主。
2、应用标准二、总体设计内容概括2.1合同技术要求及技术协议技术要求;逐条分析合同及技术协议,提炼重点内容、与常规项目差异点。
2.2货架系统与堆垛机参数的确认;详见第三章节。
2.3托盘参数的确认;详见第三章节。
2.4托盘输送系统的布局及参数确认;详见第三章节。
2.5项目土建基础要求;详见第三章节。
提供电气预埋要求。
2.6总体布置图要求;➢同一条输送线上的减速电机布置方向要求一致,提供给供应商的图纸上必须明确;➢输送线表明输送方向;➢表明各个输送节点合同要求的处理能力;➢发布的总体布置图要求在设备上注明:减速电机功率、是否带刹车信息;一台设备带多台减速电机的用“+”连接,按输送、升降、旋转顺序排列;具体代码见下表的规定。
巷道式堆垛机控制系统的设计
团固四固团口 8 i
仿一 , 毽■ I A C MI E C P C DI A CA I AP
巷道式堆垛机 控制系统的 设计
姚 松 丽
( 海工 程 技 术 大 学 机 械 工程 学院 , 海 2 1 2 上 上 0 6 0)
Th n r l y t m sg o n t c e e Co t o s e De i n f r La e S a k r S
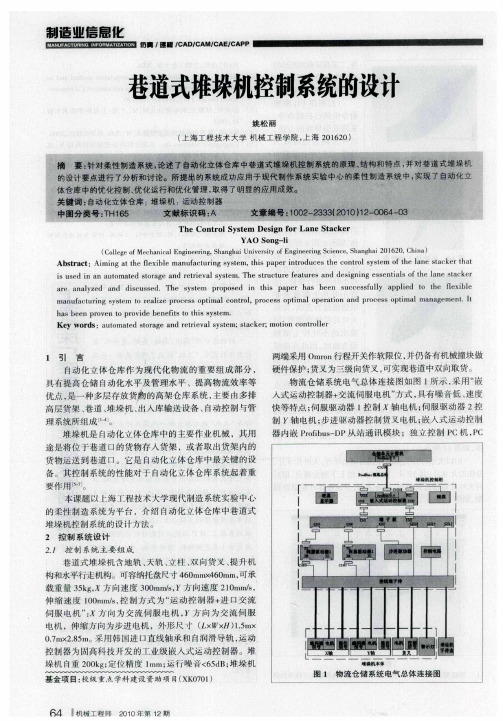
堆垛机是 自动化立体仓库 中的主要作业机械 ,其用 器 内嵌 Po b s DP从 站通 讯 模块 ;独立 控 制 P rf u — i C机 , C P
途是 将位 于巷道 口的货 物存 入货 架 ,或 者取 出货 架 内 的 货 物 运送 到巷 道 口。它是 自动化 立体 仓 库 中最关 键 的设 备 。其控 制 系统 的性 能对 于 自动 化立 体仓 库 系统 起着 重
自动化立体仓库中巷道堆垛机PLC的控制特点及编程
0 0 0 0 O O O O 排列 层 图 5 堆垛机实时地址显示 e. 若出现故障, 则显示故障代码及故 障语句。 如图 6
E3 3 OOOO
Y RUN 键键入
N
数字键 N
Y
功能键 N
Y
显示该键值
F键 Y
F键 功能块
↑↓键 Y
↑↓键 功能块
D el键 Y
子程序SBN 000 图 8 控制功能块程序框图
— 55 —
《机械设计与研究》1998 No. 2
SBN 000 (h30, h31, h32) (h33, h34, h35)
表 1 四种作业方式地址传送路径表
入库
出库
拣选
CN TR 1Φ # 0036 时 (# 0001, # 0000, # 0001)
软件中, 管理机与各 PL C 采用如下的通信格式及约定。 整个通信功能块的程序框图如图 10。
表 2 PLC—管理机数据通信格式及约定
byte
发送块
byte
接收快
0 通信控制字
0
1
1
2 任务序号字
2
3
3
4 返回控制信息 (无任务代 4
5 码, 执行任务代码, 故障代 5
码, 任务完成代码)
6
6
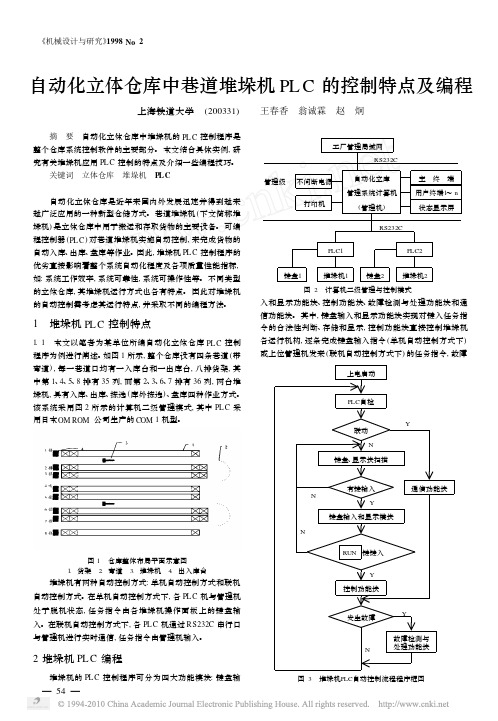
199802020图7键盘输入和显示功能块程序框图enter键功能块enter键del键功能块del键键键功能块f键功能块f键功能键显示该键值数字键run键键入键盘显示块扫描yynnnyyyyy图8控制功能块程序框图子程序sbn000入库地址处理出库地址处理拣选地址处理盘库地址处理入库出库拣选盘库判断操作方式清除该任务取下一条指令任务全部完成nynynynyny检测与处理功能块实现对系统故障的实时检测并处理通信功能块用于管理各堆垛机与管理机的实时通讯包括各种通讯包如
双立柱巷道物流堆垛起重机设计
摘要随着世界经济的持续发展和科学技术的突飞猛进,现代物流作为现代经济的重要组成部分和工业化进程中最为经济合理的综合服务模式,正在全球范围内得以迅速发展。
自动化立体仓库作为现代物流系统的重要组成部分,是一种多层存放货物的高架仓库系统,它是在不直接进行人工干预的情况下自动地存储和取出物流的系统。
它是现代工业社会发展的高科技产物,对提高生产率、降低成本有着重要意义。
本文以设计了一台能在仓库中运输、堆取货物的机械设备——双立柱式巷道堆垛起重机,并着重分析了其升降机构、伸叉机构、行走机构等机构的工作原理,并对各机构进行分析设计、选取与尺寸计算。
内容包括:总体运动方案设计和结构分析、起升机构的设计、伸叉机构设计、行走机构设计、机体支架设计及其他装置设计等内容。
各机构以电机的选取入手,通过对钢丝绳、卷筒、链轮链条、皮带轮皮带的工作性能的分析设计计算与选取,从而设计合适的双立柱式巷道堆垛机起重机的机架,进而设计一台性能完备的双立柱式巷道堆垛起重机。
关键词:双立柱;自动化仓库;巷道;物流;堆垛起重机;设计ABSTRACTAlong with continuously develop of the science technology and world economy, modern logistics which are an important part in the modern economy and a most economic reasonable comprehensive service mode in the process of industrialization, develops quickly in the global scope. Automated three-dimensional storehouse as an important composition part in logistics, is one kind of multilayered depositing cargo high structure warehouse systems. It dose not directly carries on the manual intervention in the situation automatically to save and to take out the system which the thing flows. It is the high tech product out of the development of modern industry society, which have the vital significance to enhance the productivity and reduce the cost.This paper is taking designing a machine named double pillar alley Stacking Crane of engaging in piling things or transportation in storehouse. It analyses it’s hoisting mechanism, stretch fork mechanism , walk mechanism, working principle, and it’s aimed at each mechanism to design, select , and size’s calculate of double post alley stacking crane. Overall sport scheme’s design and analyze of structure, the design of hoisting mechanism , stretch fork’s mechanism design , walk mechanism’s design, organism frame design and other installation designs. Each mechanism with generator select to start, through calculating and selecting of the character of service of wire rope, reel, sprocket chain and the ship leather belt of leather belt to analyze and design, so to design the suitable frame of double pillar alley stacking crane, and then to design a double pillar alley stacker of complete natural capacityKeyword: Double Pillar; Automated Three-dimensional Storehouse; Alley; Logistics;Stacking Crane; Design第1章绪论随着世界经济的持续发展和科学技术的突飞猛进以及经济全球化的趋势的加强,各国面临着前所未有的机遇和挑战。
立体仓库巷道堆垛机设计
1 绪论1.1 本课题研究的背景及意义我国现在正处于工业化、城市化发展的高速期,未来一段时间内,土地资源和劳动力资源将会成为制约企业发展的瓶颈,鉴于此,建造立体仓库是未来企业发展趋势,自动化立体仓库是现代物流中的重要组成部分,是实现物流系统合理化的关键。
它具有空间利用率高,便于实现自动化管理,实时自动结算库存货物种类和数量等许多优点,对加快物流速度、提高劳动生产率、降低生产成本很重要,已开始应用于汽车、电子、医药、烟草、建材、邮电等许多行业。
堆垛机是自动化立体仓库中最重要的搬运、起重、堆垛设备,对立体仓库的出入库效率有决定性影响,是立体仓库能否达到设计要求的关键设备之一。
而我国在堆垛机制造技术上和世界发达国家有很大差距,鉴于我国未来物流业发展的广阔空间,堆垛机技术落后必将成为限制我国自动化立体仓库发展的瓶颈,使我国在国际物流业竞争中处于不利地位。
鉴于以上因素,发展堆垛机技术有积极意义。
1.2 有轨巷道堆垛机的发展现状有轨巷道堆垛起重机是随着立体仓库的出现而发展起来的专用起重机,通常简称为堆垛机。
其主要用途是在高层货架仓库的巷道内沿轨道运行,将位于巷道口的货物存入货格,或者相反,取出货格内的货物运送到巷道口,完成出入库作业。
20世纪70年代初期,我国开始研究采用巷道式堆垛机的立体仓库,1980年我国第一座自动化立体仓库在北京汽车制造厂投产,从此自动化立体仓库在我国得到了迅速发展。
据不完全统计,到目前已建成三百余座。
堆垛机做为立体仓库中最重要的起重运输设备,也得到了较快的发展。
早期的堆垛机是在桥式起重机的起重小车上悬挂一个门架,利用货叉在立柱上的上下运动及立柱的旋转运动来搬运货物,通常称之为桥式堆垛机。
1960年左右在美国出现了巷道堆垛机,这种堆垛机是在地面的导轨上行走,利用货架上部的导轨防止倾倒。
随着立体仓库的发展,巷道堆垛机逐渐替代了桥式堆垛机。
随着计算机控制技术和自动化立体仓库的发展,堆垛机的应用越来越广泛,技术性能越来越好,高度也在不断增加,到1970年实现了由货架支承的高度为40米的堆垛机。
立体仓库巷道式堆垛机设计
案例三:某大型物流中心立体仓库的设计
仓库规模:占地面积大,存储容量高 堆垛机类型:巷道式堆垛机 设计特点:自动化程度高,操作简便 应用效果:提高仓库管理效率,降低运营成本
立体仓库巷道式堆垛机设计的 挑战与展望
面临的挑战
技术难度:需 要解决巷道式 堆垛机的设计、 制造、安装和 调试等环节的
技术难题
特点:巷道式堆垛 机可以实现自动化 存取,减少人工操 作,提高工作效率
特点:巷道式堆垛 机具有较高的安全 性和可靠性,可以 保证货物的安全和 仓库的正常运行
立体仓库巷道式堆垛机设计要 素
结构设计
堆垛机结构:包 括机架、行走机 构、提升机构、 货叉机构等
巷道设计:包括 巷道宽度、高度、 长度、坡度等
防坠落设 计:堆垛 机应有可 靠的防坠 落装置, 防止意外 坠落
防火设计: 堆垛机应 具备防火 性能,防 止火灾发 生
防静电设 计:堆垛 机应具备 防静电性 能,防止 静电对设 备的影响
防雷设计: 堆垛机应 具备防雷 性能,防 止雷击对 设备的影 响
防尘设计: 堆垛机应 具备防尘 性能,防 止灰尘对 设备的影 响
THANK YOU
汇报人:
确定堆垛机尺寸:根据仓库 空间和货物尺寸确定
确定堆垛机类型:巷道式堆 垛机
确定堆垛机控制系统:PLC、 HMI等
确定堆垛机安全措施:防撞、 防坠落等
确定堆垛机维护和保养方案: 定期检查、更换易损件等
详细设计
确定堆垛机类型:巷道式堆垛机 确定堆垛机尺寸:高度、宽度、长度 确定堆垛机结构:立柱、横梁、导轨、驱动装置等 确定堆垛机控制系统:PLC、传感器、执行器等 确定堆垛机安全措施:防撞、防坠落、防火等 确定堆垛机维护保养方案:定期检查、润滑、更换易损件
自动化立体仓库堆垛机毕业设计

本科毕业设计(论文)自动化立体仓库堆垛机设计DESIGN OF STACKER CRANE FOR AUTOMATIC WAREHOUSE20013年6月摘要有轨式巷道堆剁起重机是随着立体仓库的出现而发展起来的专用起重机,通常简称为堆剁机。
堆剁机是立体仓库中最重要的起重运输设备,是代表立体仓库特征的标志。
其主要用途是在高层货架仓库的巷道内沿轨道运行,将位于巷道口的货物存入货格,或是取出货格内的货物运送到巷道口,完成出入库作业。
20世纪70年代初期,我国开始研究采用巷道式堆剁机的立体仓库,不久便广泛应用于各行业和地区,有的已经形成系列化,据不完全统计,到目前已建成三百余座。
随着现代工业生产的发展,有轨巷道堆垛起重机的技术也在不断提高和完善。
世界主要工业国家都把着眼点放在开发性能可靠的新产品和采用高新技术上,更加注重实用性和安全性。
如今,自动化立体仓库及堆垛机已成为企业生产管理不可获缺的重要组成部分。
本文从实际问题出发,以现有设备为依托,先确定出堆垛机的总体结构及各部分的结构草图,然后运用理论力学、材料力学、机械设计、制造技术等专业知识,并查阅相关设计手册,对其机械部分进行了详细的设计计算,包括:机架、行走机构、提升机构、载货台和货叉伸缩机构。
设计过程中,以实现堆垛机的机械性能为目的,在满足其强度、刚度、运行稳定性等要求的前提下,综合考虑结构的合理性和所选材料的经济性,力求达到高质量、低成本。
关键词自动化立体仓库堆垛机结构设计AbstractTrack Tunnel-Stacker Crane is developed by a special crane with the emergence of three-dimensional warehouse, usually referred to as stacker crane. Stacker crane is the most important lifting and transportation equipment in a three-dimensional warehouse, and is one characteristic of three-dimensional warehouse. Its main use is orbit along the roadway in tunnel of high-rise warehouse, put the goods that be located at the mouth of the tunnel into the shelves, or take out goods and delivered to the tunnel mouth, complete the storage operations.At the early 70’s of 20th, China started to develop the three-dimensional warehouse with stacker crane, and soon have be widely used in various industries and regions,some have formed serialization. According to incomplete statistics, more than 300 warehouses have been completed now. With the development of modern industry, the technology of stacker crane is being improved. All the world's major industrial countries focus on the development of new products with reliable performance and the use of high-tech,and pay more attention to the practicality and safety. At present, automatic three-dimensional warehouse and stacker crane have become an important component of production management.This paper starts from the practical problems, and bases on existing equipments. Firstly confirm the overall structure of stacker crane and the draft of parts of the structure. Then use Theoretical Mechanics, Material Mechanics, Machine Design and Manufacturing Technology, and according to relevant design manuals, elaborates on its machinery parts, including: Rack, Running Mechanism,Lifting Mechanism,Loading Stations and Telescopic Fork Mechanism. In the design process, considering the rationality of structure and the economy of the selected materials in order to achieve the mechanical properties of stacker and request of strength, stiffness, running stability, attempt to reach the aim of high-quality, low-cost.Keywords Automatic Three-Dimensional Warehouse Stacker Crane Design of Structure目录第一章绪论 (1)1.1自动化立体仓库概述 (1)1.2自动化立体仓库的发展 (1)1.3发展自动化立体仓库的必要性 (2)1.4自动化立体仓库中的堆垛起重机 (4)1.5巷道式堆垛起重机的结构及设计要点 (5)1.5.1 机架 (5)1.5.2行走机构 (5)1.5.3提升机构 (5)1.5.4载货台及货叉 (5)1.5.5电器设备 (6)1.5.6安全保护装置 (6)第二章堆垛机机架的结构设计 (7)2.1 自动化立体仓库的结构尺寸及运行条件 (7)2.2 机架设计概述 (7)2.2.1机架设计应满足的一般要求 (7)2.2.2 机架的设计步骤 (7)2.3 上导轨设计 (9)2.3.1 导轨类型的确定 (9)2.3.2 导轨材料的确定 (9)2.3.3导轨截面形状的确定 (9)2.4 上横梁设计 (11)2.5 立柱设计 (14)2.6 下导轨设计 (19)2.6.1导轨类型的选择 (19)2.6.2滚动直线导轨副的结构与特点 (19)2.6.3 滚动直线导轨副的计算 (20)第三章行走机构的设计 (25)3.1 电动机的选择 (25)3.1.1选择电动机应综合考虑的问题 (25)3.1.2电动机的选择 (25)3.2 传动装置的设计 (26)3.2.1 传动方案的确定 (26)3.2.2 第一级减速齿轮副的计算 (28)3.2.3 第二级减速齿轮副的计算 (32)3.2.4 齿轮齿条副几何尺寸的确定及计算 (36)3.2.5 轴的计算 (37)3.3 行走机构结构图 (42)第四章提升机构的设计 (43)4.1 电动机的选择 (43)4.2 传动滚子链的设计计算 (43)4.2.1滚子链几何尺寸的计算 (43)4.2.2 滚子链静强度计算 (44)4.2.3 链轮几何尺寸计算 (45)4.3提升滚子链的设计计算 (47)4.3.1滚子链几何尺寸的计算 (47)4.3.2链轮几何尺寸的计算 (48)第五章载货台与货叉伸缩机构的设计 (49)5.1 电动机的选择 (49)5.2 传动机构的计算 (50)5.2.1 圆锥齿轮副的计算 (50)5.2.2 齿轮齿条副的计算 (53)5.2.3 传动轴的设计 (57)5.3导轨与叉板的设计 (59)5.3.1导轨的计算 (59)5.3.2 板件尺寸的确定 (60)5.4载货台结构图 (61)结论 (63)致谢 (65)参考文献 (66)附录Ⅰ毕业实习报告................................. 错误!未定义书签。
自动化立体仓库中堆垛机的设计
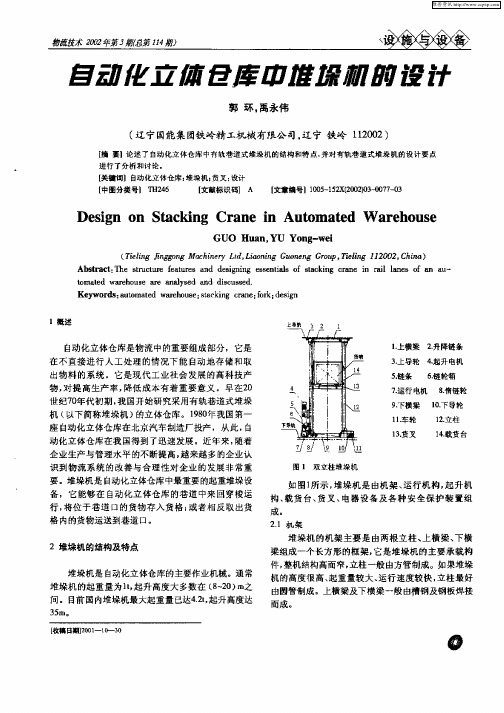
7运行 电机 8惰链轮 . . 9下横粱 l. . 0下导轮 1. 1 车轮 1. 3货叉 1. 2立柱 1. 4载货 台
企业生产与管理水平 的不断提高, 越来越多的企业认 识 到物 流 系 统 的 改 善与 合 理 性 对 企业 的 发展 非 常 重
要 。堆 垛机 是 自动化 立体仓 库 中最重 要 的起 重堆垛 设 备 ,它 能够 在 自动 化立 体仓 库 的巷 道 中来 回 穿梭 运 行 , 位 于巷 道 口的货物 存 入货 格 : 者 相 反 取 出货 将 或 格 内的货物 运送 到巷道 口。
而成 。
O
维普资讯
L 6T 5 E HNOL OG t TC C OGY e , O 2s d lt 14 N 32 O ie a 1J  ̄
堆垛 机 的机 架沿 天 轨 运行 ,为防 止框 架倾 倒 , 在
ห้องสมุดไป่ตู้
上横粱上装有导向轮 。 天轨一般由角钢 、 糟钢或热轧H 型 钢制 成 。
6 轮箱 . 链
物, 对提 高生产率 , 降低成本有着重要意义 。早在2 0 世纪7 年代初期, 0 我国开始研究采用有轨巷道式堆垛
机( 以下 简称 堆 垛 机 )的立 体仓 库 。 18 年 我 国第一 90 座 自动 化立 体 仓 库在 北 京汽 车制 造厂 投产 ,从 此 , 自 动化 立 体 仓库 在我 国得 到 了迅速 发展 。近年 来 , 随着
维普资讯
镑谎技术 20 02年第3期( 14期) 总第 1
鲁 袖 化 立 德 e 库 巾 惟 垛 弧 呐 没 计
郭 环. 禹永伟 ( 辽宁 国能集 团铁岭精工机械有限公 司, 辽宁 铁岭 l20 ) 10 2
【 要l论述 了自动化立体仓库 中有轨 巷道 式堆垛机的结构和特 点, 摘 井对 有轨巷 道式堆垛机 的设计 要点 进行了分析和讨论 。 【 关键词l自动化立体仓库: 堆垛机; 货叉 ; 设计
立体仓库巷道式堆垛机设计
立体仓库巷道式堆垛机设计立体仓库巷道式堆垛机是一种自动化仓储设备,用于在仓库中储存和取出货物。
该设备具有储存密度高、操作效率高、空间利用率高等优点,广泛用于物流行业和仓储中心。
在设计巷道式堆垛机时,需要考虑以下几个方面:设备结构设计、控制系统设计和安全保护设计。
设备结构设计是巷道式堆垛机设计的核心内容之一、巷道式堆垛机主要由立柱、横梁、垂直升降系统、水平行走系统和货叉等组成。
立柱和横梁构成巷道式堆垛机的主体结构,用于支撑和固定货叉。
垂直升降系统用于控制货叉的垂直升降,可以根据需要进行升降操作。
水平行走系统可以使货叉在巷道内左右移动,实现对货物的取垛和放垛。
货叉是巷道式堆垛机的重要组成部分,用于托盘的搬运和堆垛。
设备结构设计应考虑设备的稳定性和刚度,以确保设备在工作中不发生形变和摇晃。
控制系统设计是巷道式堆垛机设计的另一个重要方面。
控制系统包括主控制器、传感器、执行机构和通信系统等。
主控制器用于控制和监控整个巷道式堆垛机的运行。
传感器可以通过检测设备的状态和位置信息来实现对设备的自动化控制。
执行机构包括电动机、液压装置等,用于控制设备的运动和动作。
通信系统用于与物流管理系统和仓库管理系统进行数据交互。
控制系统设计应考虑设备的稳定性、安全性和可靠性,以确保设备的正常运行。
安全保护设计是巷道式堆垛机设计的重要内容之一、巷道式堆垛机的工作环境狭窄,需要考虑人员的安全和设备的安全。
安全保护设计包括安全围栏、安全门、防撞装置和紧急停止装置等。
安全围栏和安全门用于将巷道式堆垛机与人员隔离,防止人员误入工作区域。
防撞装置用于保护设备免受碰撞和损坏。
紧急停止装置用于在紧急情况下停止设备的运行,确保人员和设备的安全。
安全保护设计应符合相关的安全标准和规范,以确保设备的安全性和运行的可靠性。
综上所述,立体仓库巷道式堆垛机的设计需要考虑设备结构设计、控制系统设计和安全保护设计。
合理的设计可以提高设备的性能和效率,提高物流和仓储的效益。
自动化立体仓库堆垛机毕业设计(机械CAD图纸)

本科毕业设计(论文)自动化立体仓库堆垛机设计DESIGN OF STACKER CRANE FOR AUTOMATIC WAREHOUSE20013年6月摘要有轨式巷道堆剁起重机是随着立体仓库的出现而发展起来的专用起重机,通常简称为堆剁机。
堆剁机是立体仓库中最重要的起重运输设备,是代表立体仓库特征的标志。
其主要用途是在高层货架仓库的巷道内沿轨道运行,将位于巷道口的货物存入货格,或是取出货格内的货物运送到巷道口,完成出入库作业。
20世纪70年代初期,我国开始研究采用巷道式堆剁机的立体仓库,不久便广泛应用于各行业和地区,有的已经形成系列化,据不完全统计,到目前已建成三百余座。
随着现代工业生产的发展,有轨巷道堆垛起重机的技术也在不断提高和完善。
世界主要工业国家都把着眼点放在开发性能可靠的新产品和采用高新技术上,更加注重实用性和安全性。
如今,自动化立体仓库及堆垛机已成为企业生产管理不可获缺的重要组成部分。
本文从实际问题出发,以现有设备为依托,先确定出堆垛机的总体结构及各部分的结构草图,然后运用理论力学、材料力学、机械设计、制造技术等专业知识,并查阅相关设计手册,对其机械部分进行了详细的设计计算,包括:机架、行走机构、提升机构、载货台和货叉伸缩机构。
设计过程中,以实现堆垛机的机械性能为目的,在满足其强度、刚度、运行稳定性等要求的前提下,综合考虑结构的合理性和所选材料的经济性,力求达到高质量、低成本。
关键词自动化立体仓库堆垛机结构设计AbstractTrack Tunnel-Stacker Crane is developed by a special crane with the emergence of three-dimensional warehouse, usually referred to as stacker crane. Stacker crane is the most important lifting and transportation equipment in a three-dimensional warehouse, and is one characteristic of three-dimensional warehouse. Its main use is orbit along the roadway in tunnel of high-rise warehouse, put the goods that be located at the mouth of the tunnel into the shelves, or take out goods and delivered to the tunnel mouth, complete the storage operations.At the early 70’s of 20th, China started to develop the three-dimensional warehouse with stacker crane, and soon have be widely used in various industries and regions,some have formed serialization. According to incomplete statistics, more than 300 warehouses have been completed now. With the development of modern industry, the technology of stacker crane is being improved. All the world's major industrial countries focus on the development of new products with reliable performance and the use of high-tech,and pay more attention to the practicality and safety. At present, automatic three-dimensional warehouse and stacker crane have become an important component of production management.This paper starts from the practical problems, and bases on existing equipments. Firstly confirm the overall structure of stacker crane and the draft of parts of the structure. Then use Theoretical Mechanics, Material Mechanics, Machine Design and Manufacturing Technology, and according to relevant design manuals, elaborates on its machinery parts, including: Rack, Running Mechanism,Lifting Mechanism,Loading Stations and Telescopic Fork Mechanism. In the design process, considering the rationality of structure and the economy of the selected materials in order to achieve the mechanical properties of stacker and request of strength, stiffness, running stability, attempt to reach the aim of high-quality, low-cost.Keywords Automatic Three-Dimensional Warehouse Stacker Crane Design of Structure目录第一章绪论 (1)1.1自动化立体仓库概述 (1)1.2自动化立体仓库的发展 (1)1.3发展自动化立体仓库的必要性 (2)1.4自动化立体仓库中的堆垛起重机 (4)1.5巷道式堆垛起重机的结构及设计要点 (5)1.5.1 机架 (5)1.5.2行走机构 (5)1.5.3提升机构 (5)1.5.4载货台及货叉 (5)1.5.5电器设备 (6)1.5.6安全保护装置 (6)第二章堆垛机机架的结构设计 (7)2.1 自动化立体仓库的结构尺寸及运行条件 (7)2.2 机架设计概述 (7)2.2.1机架设计应满足的一般要求 (7)2.2.2 机架的设计步骤 (7)2.3 上导轨设计 (9)2.3.1 导轨类型的确定 (9)2.3.2 导轨材料的确定 (9)2.3.3导轨截面形状的确定 (9)2.4 上横梁设计 (11)2.5 立柱设计 (14)2.6 下导轨设计 (19)2.6.1导轨类型的选择 (19)2.6.2滚动直线导轨副的结构与特点 (19)2.6.3 滚动直线导轨副的计算 (20)第三章行走机构的设计 (25)3.1 电动机的选择 (25)3.1.1选择电动机应综合考虑的问题 (25)3.1.2电动机的选择 (25)3.2 传动装置的设计 (26)3.2.1 传动方案的确定 (26)3.2.2 第一级减速齿轮副的计算 (28)3.2.3 第二级减速齿轮副的计算 (32)3.2.4 齿轮齿条副几何尺寸的确定及计算 (36)3.2.5 轴的计算 (37)3.3 行走机构结构图 (42)第四章提升机构的设计 (43)4.1 电动机的选择 (43)4.2 传动滚子链的设计计算 (43)4.2.1滚子链几何尺寸的计算 (43)4.2.2 滚子链静强度计算 (44)4.2.3 链轮几何尺寸计算 (45)4.3提升滚子链的设计计算 (47)4.3.1滚子链几何尺寸的计算 (47)4.3.2链轮几何尺寸的计算 (48)第五章载货台与货叉伸缩机构的设计 (49)5.1 电动机的选择 (49)5.2 传动机构的计算 (50)5.2.1 圆锥齿轮副的计算 (50)5.2.2 齿轮齿条副的计算 (53)5.2.3 传动轴的设计 (57)5.3导轨与叉板的设计 (59)5.3.1导轨的计算 (59)5.3.2 板件尺寸的确定 (60)5.4载货台结构图 (61)结论 (63)致谢 (65)参考文献 (66)附录Ⅰ毕业实习报告................................. 错误!未定义书签。
自动化立体仓库堆垛机的设计

自动化立体仓库堆垛机的设计引言概述:随着现代物流行业的发展,自动化立体仓库堆垛机成为提高仓储效率和减少人力成本的重要设备。
本文将详细介绍自动化立体仓库堆垛机的设计,包括其结构、工作原理、控制系统以及未来发展趋势。
一、结构设计1.1 堆垛机框架设计:堆垛机的框架设计应考虑承重能力、稳定性和结构刚度。
采用高强度钢材制作框架,通过计算和模拟分析确定合理的结构形式和尺寸,以满足堆垛机的工作要求。
1.2 升降机构设计:升降机构是堆垛机的核心部分,其设计应考虑升降速度、精度和可靠性。
采用液压或电动升降机构,结合传感器和控制系统实现精确的垂直运动控制。
1.3 搬运装置设计:搬运装置是堆垛机的关键组成部分,其设计应考虑搬运能力、稳定性和灵活性。
采用夹具、吸盘或机械手等装置,结合传感器和控制系统实现对货物的准确抓取和放置。
二、工作原理2.1 货物入库:堆垛机通过传感器感知货物的位置和尺寸,利用搬运装置将货物从入库区域搬运到指定位置。
同时,堆垛机可以通过RFID等技术实现对货物信息的管理和追踪。
2.2 货物出库:堆垛机根据出库指令,通过搬运装置将货物从指定位置搬运到出库区域。
在此过程中,堆垛机可以实现货物的分类、分拣和打包等功能,提高出库效率。
2.3 堆垛操作:堆垛机可以根据货物的尺寸和重量,自动进行堆垛操作。
通过搬运装置的升降和伸缩,实现对货物的垂直和水平堆垛,最大限度地利用仓库空间。
三、控制系统3.1 传感器系统:堆垛机通过激光传感器、摄像头等设备实时感知货物的位置、尺寸和形状,为后续的搬运操作提供准确的数据支持。
3.2 控制算法:堆垛机的控制算法应考虑货物的优化堆垛路径、搬运速度和安全性。
采用智能控制算法,结合实时反馈信息,实现对堆垛机运动轨迹的精确控制。
3.3 通信系统:堆垛机通过与仓库管理系统的通信,实现对货物信息的交互和共享。
通过云平台和物联网技术,实现对堆垛机的远程监控和管理。
四、未来发展趋势4.1 智能化:未来的自动化立体仓库堆垛机将更加智能化,通过机器学习和人工智能技术,实现对货物的自动分类、分拣和打包。
最新双立柱巷道堆垛机的设计—

双立柱巷道堆垛机的设计—目录设计总说明 (I)INTRODUCTION (II)1.3 堆垛机各机构的总体方案设计概述 (3)1.3.1堆垛机的设计要求和技术指标 (3)第二章堆垛机门架的结构设计计算 (7)2.1 门架结构特点 (7)2.2 门架的弯矩和挠度 (7)2.2.1水平载荷产生的弯距 (8)2.2.2由行走车轮的反力产生的弯距 (10)2.2.3有叉取作业产生的弯矩 (12)2.3 设计数据计算校核 (12)2.3.1框架结构的设计数据如下: (12)2.3.2各部分的弯矩 (12)2.3.3结构构件的弯曲应力 (14)第三章堆垛机伸缩货叉机构的设计计算 (15)3.1齿轮齿条直线差动机构工作原理 (15)3.6 货叉相关零件的选取与校核 (21)设计原始数据:载重600kg,伸缩速度20m/min (21)3.6.1伸缩行走轴承的选取校核 (21)3.6.3电动机与联轴器选取与校核 (22)第四章堆垛机行走机构的设计计算 (26)4.2 行走装置的电动机与减速器的选取 (27)鸣谢 (29)设计总说明自动化立体仓库是物流中的重要组成部分,它是在不直接进行人工干预的情况下自动地存储和取出货物的系统。
它是现代工业社会发展的高科技产物,对提高生产率、降低成本有着重要的意义。
堆垛机是自动化立体仓库中最重要的起重堆垛设备,它能够在自动化立体的巷道中来回穿梭运行,将位于巷道口的货物存入货格,或者相反地取出货格内的货物运送到巷道口。
本设计在确定双立柱堆垛机的总体设计方案基础上,重点对货叉伸缩机构和行走机构进行了详细设计。
设计了货叉伸缩机构的结构设计,分析了货叉的受力图,并推导出弯矩挠度公式,设计出货叉的外部结构尺寸,接着又设计校核了货叉内部零件的尺寸,最终设计出了满足条件、灵活、适用、简捷、方便的货叉结构,并选取出适宜的电机、减速器;介绍了堆垛机的行走机构的设计计算,并确定了尺寸及电机、减速器的选取。
双立柱巷道式堆垛机毕业设计(绝对全,附图)[管理资料]
![双立柱巷道式堆垛机毕业设计(绝对全,附图)[管理资料]](https://img.taocdn.com/s3/m/f8d538d2aaea998fcc220efc.png)
本科毕业设计(论文)中期报告毕业设计(论文)题目:立体仓库巷道式堆垛机设计专业:机械设计制造及其自动化一、课题简介1、课题研究任务有轨巷道堆垛机基本功能是在控制系统或人工控制下,按照指令完成对货架内及站台货物的存取和输送。
主要动作描述:有轨巷道堆垛机在货架巷道内运动,可以分解为沿货架巷道轨道行走运动、沿有轨巷道堆垛机立柱或立柱导轨的垂直起升运动和对出入库站台的货物的存取运动。
机械结构可以简单叙述为:在堆垛机的顶部和底部上分别装有一组或两组导向轮,夹持着天轨和地轨(天轨安装于货架上,地轨安装在地面上),行走电机驱动与地轨接触的行走轮,在天轨和地轨的约束下,堆垛机在巷道内水平行走;系着钢丝绳或链条的载货台,在起升电机的驱动下拉动载货台使其沿立柱或者立柱两侧的导轨完成升降运动;货叉电机驱动一个行程倍增机构,使上叉完成左右存、取货物运动。
三种运动分别在控制系统协调控制下,完成货物的出、入库工作。
为完成有轨巷道堆垛机运动的基本功能,设备必须具备三个方向的驱动和传动功能,需要对设备运行进行有效的控制,有轨巷道堆垛机除了完成货物的存取外,设备安全也是其功能中的重要组成部分。
2、相关参数堆垛机额定起重量:300kg;行走最大速度:;升降最大速度:;货叉速度:;货箱尺寸:长×宽×高=500×500×500mm;注:宽度方向为货叉叉取方向。
二、课题详细方案设计(一)总体方案:1、为使堆垛机能够准确、快速、安全、搬运货物出入库,必须满足以下设计要求:(1)具备三维运动功能,即堆垛机沿巷道来回运动、载货台垂直运动、货叉沿货架方向双向伸缩;(2)满足一定的定位精度,重复定位精度误差不能超过10mm ;(3)具备安全保护措施;(4)在满足强度、刚度和可靠性的前提下,尽量减小堆垛机各部分的重量,以减小提升功率和行走时的摩擦阻力;(5)保护仓库环境,避免货物污染受损[1]。
2、有轨巷道堆垛机的现有类型及设计选用类型按现行机械行业标准,有轨巷道堆垛机分类方式多种多样,如按支承方式、用途、控制方式、结构、运行轨迹等分类。
自动化立体仓库堆垛机的设计
自动化立体仓库堆垛机的设计引言概述:随着现代物流技术的不断发展,自动化立体仓库堆垛机已经成为仓储行业中不可或缺的设备。
它具有高效、精准、安全等优点,可以大大提高仓储效率,减少人力成本。
本文将从设计角度出发,详细介绍自动化立体仓库堆垛机的设计要点。
一、结构设计:1.1 载货架设计:要考虑货物的尺寸、重量等因素,确定合适的载货架设计,确保堆垛机能够稳定地搬运货物。
1.2 传动系统设计:传动系统是堆垛机的核心部件,要选择高质量的传动装置,确保其稳定性和耐用性。
1.3 控制系统设计:控制系统是堆垛机的大脑,要设计可靠的控制系统,确保堆垛机能够准确地执行指令。
二、导向系统设计:2.1 导轨设计:导轨是堆垛机行走的基础,要设计合理的导轨系统,确保堆垛机行走稳定、准确。
2.2 传感器设计:传感器在堆垛机的运行中起着至关重要的作用,要设计灵敏、精准的传感器系统,确保堆垛机能够准确感知货物位置。
2.3 安全系统设计:安全是堆垛机设计中最重要的考虑因素之一,要设计完善的安全系统,确保堆垛机在运行中不会发生意外。
三、动力系统设计:3.1 电机选择:要选择适合的电机,确保堆垛机具有足够的动力输出。
3.2 传动装置设计:传动装置是动力系统的关键组成部分,要设计合理的传动装置,确保传动效率高、噪音低。
3.3 能源管理系统设计:要设计能源管理系统,确保堆垛机在运行中能够高效利用能源,降低能源消耗。
四、控制系统设计:4.1 PLC程序设计:PLC程序是控制系统的核心,要设计稳定、可靠的PLC程序,确保堆垛机能够准确执行指令。
4.2 通信系统设计:堆垛机通常需要与仓库管理系统进行通信,要设计稳定的通信系统,确保数据传输准确、及时。
4.3 自动化控制设计:要设计自动化控制系统,使堆垛机能够实现自主运行、自动化操作。
五、维护保养设计:5.1 定期检查:要制定定期检查计划,确保堆垛机各部件正常运行。
5.2 润滑保养:要定期对堆垛机进行润滑保养,延长设备寿命。
立体仓库巷道堆垛机的控制系统设计精编版
本科毕业设计(论文)题目立体仓库巷道堆垛机的控制系统设计学生姓名韦忠爽学号09B06070207指导教师孙建华学院机电学院专业机械设计制造及其自动化交稿日期2013年5月10日学术诚信声明本人郑重声明:所呈交的毕业设计(论文),是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用的内容外,本毕业设计(论文)不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
中文题目:英文题目:作者签名:日期:年月日版权使用授权书本毕业设计(论文)作者同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权上海建桥学院可以将本毕业设计(论文)的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本毕业设计(论文)。
保密□,在年解密后适用本授权书。
本论文属于不保密□。
(请在以上方框内打“√”,如作者未做出选择的情况下,按不保密处理。
)作者签名:指导教师签名:日期:年月日日期:年月日立体仓库巷道堆垛机的控制系统设计摘要集物流、信息流、和资金流于一身的物流配送中心,在全球化和市场化的时代里,促进了世界经济与贸易的大发展。
物流配送最核心的系统设备就是自动化立体仓库。
而堆垛机又是自动化立体仓库的关键设备。
本文设计的是一两排四层三列式立体仓库巷道式堆垛机的电气控制系统,并实现货物存取的模拟控制。
主要工作包括:分析对比各类立体仓库的控制技术,确定实现方案;进行堆垛机的机械结构分析;进行堆垛机的控制系统设计;用组态软件设计人机界面,对货物存取过程进行仿真控制。
本文所述的系统是采用先进的西门子PLC控制器控制,用变频器驱动的半闭环交流伺服系统。
设计时分析了堆垛机的工作过程(主要运动有行走、升降和叉伸运动),利用了光电传感器检测堆垛机位置,并研究了堆垛机运动控制、认址检测方式,实现了堆垛机的运动和定位方案。
(完整版)自动化立体仓库堆垛机设计
目录第1章绪论 (1)第1.1节研究的背景与内容 (1)1.1.1概述 (1)1.1.2有轨巷道堆垛机的发展现状及特点 (2)1.1.3有轨巷道堆垛机的类型 (3)1.1.4巷道堆垛机的特点 (5)第1.2节设计的目的和意义 (6)第1.3节设计的内容及要求 (6)第1.4节设计参数 (7)第2章总体设计方案的确定 (8)第2.1节堆垛机三维运动速度的确定 (9)第2.2节堆垛机各个部分的方案选择 (9)2.2.1堆垛机起升机构传动方式的选择 (9)2.2.2堆垛机行走机构传动方式的选择 (10)2.2.3堆垛机机架的设计思路 (11)2.2.4堆垛机货叉的设计思路 (11)2.2.5堆垛机安全方案的确定 (14)2.2.6堆垛机电控部分的设计 (14)第2.3节堆垛机的技术参数 (15)第2.4节堆垛机的技术要求 (16)第3章堆垛机起升机构的设计 (22)第3.1节起升机构的总体选型 (22)第3.2节卷筒的设计 (26)3.2.1卷筒部件计算 (26)3.2.2齿轮连接盘的计算 (31)第4章堆垛机行走机构和机架的选型设计 (35)第4.1节堆垛机行走机构的选型设计 (35)第4.2节堆垛机机架的选型设计 (38)第5章堆垛机货叉的设计 (39)第5.1节货叉传动装置的总体选型 (39)第5.2节货叉传动齿轮、齿条的计算 (39)第5.3节货叉传动链轮、链条的设计计算 (43)第5.4节制动器的制动容量的设计 (45)第6章堆垛机安全装置 (47)第6.1节防撞保护装置 (48)第6.2节钢丝绳断绳保护装置 (48)第7章堆垛机电控部分设计 (49)第7.1节电器控制系统 (50)7.1.1可编程控制器的结构及各部分的作用 (50)7.1.2可编程控制器的工作原理 (52)7.1.3可编程控制器的主要功能和特点 (54)第7.2节电器传动系统 (55)7.2.1常用变速系统 (55)7.2.2变频器的分类 (56)7.2.3变频器的特点 (60)第7.3节电控原理 (60)第8章总结 (62)参考文献 (63)翻译 (64)致谢 (84)第1章绪论第1.1节研究的背景与内容1.1.1概述随着生产力的发展, 生产规模的扩大和产品结构的调整, 客观上要求作为工业企业物资供应基地的物资仓库进行改建或扩建。
自动化立体仓库堆垛机的设计
自动化立体仓库堆垛机的设计一、引言自动化立体仓库堆垛机是一种用于高效存储和取货的机械设备,广泛应用于物流、仓储和制造业等领域。
本文将详细介绍自动化立体仓库堆垛机的设计要求、工作原理、主要组成部分以及相关技术参数。
二、设计要求1. 载重能力:自动化立体仓库堆垛机应具备足够的载重能力,以满足仓库货物存储和取货的需求。
设计时需根据实际情况确定最大载重能力,并确保机器的稳定性和安全性。
2. 堆垛高度:根据仓库的高度限制和货物堆垛的要求,确定自动化立体仓库堆垛机的最大堆垛高度。
该高度应能满足仓库的储存需求,并考虑到堆垛机的稳定性和安全性。
3. 作业速度:自动化立体仓库堆垛机的作业速度应高效且稳定,以提高仓库的货物处理效率。
根据仓库的需求和作业流程,确定合理的作业速度,并确保机器的精度和可靠性。
4. 控制系统:设计自动化立体仓库堆垛机时,需要考虑到控制系统的可靠性和灵活性。
控制系统应能实现自动化操作和监控,并具备故障检测和报警功能,以确保机器的正常运行和安全性。
5. 安全性:自动化立体仓库堆垛机的设计应符合相关安全标准和规定。
设计时需考虑到防护装置、紧急停机装置、防止碰撞装置等安全措施,以保障操作人员和设备的安全。
三、工作原理自动化立体仓库堆垛机通过操纵系统控制,实现货物的存储和取货。
其工作原理主要包括以下几个步骤:1. 货物接收:通过传送带或输送机将待存储的货物送至堆垛机的接收区域。
2. 货物提升:堆垛机的提升装置将货物提升至指定的高度,以便进行堆垛或取货操作。
3. 货物堆垛:堆垛机的横移装置将货物沿水平方向移动到指定位置,然后将其堆垛在储存区域。
4. 货物取货:根据需求,堆垛机将存储区域的货物取出,并通过输送带或输送机送至指定位置。
5. 堆垛机移动:堆垛机的行走装置可根据需要在仓库内移动,以便进行不同位置的堆垛和取货操作。
四、主要组成部分自动化立体仓库堆垛机主要由以下几个组成部分构成:1. 提升装置:用于将货物提升至指定的高度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 绪论1.1 本课题研究的背景及意义我国现在正处于工业化、城市化发展的高速期,未来一段时间内,土地资源和劳动力资源将会成为制约企业发展的瓶颈,鉴于此,建造立体仓库是未来企业发展趋势,自动化立体仓库是现代物流中的重要组成部分,是实现物流系统合理化的关键。
它具有空间利用率高,便于实现自动化管理,实时自动结算库存货物种类和数量等许多优点,对加快物流速度、提高劳动生产率、降低生产成本很重要,已开始应用于汽车、电子、医药、烟草、建材、邮电等许多行业。
堆垛机是自动化立体仓库中最重要的搬运、起重、堆垛设备,对立体仓库的出入库效率有决定性影响,是立体仓库能否达到设计要求的关键设备之一。
而我国在堆垛机制造技术上和世界发达国家有很大差距,鉴于我国未来物流业发展的广阔空间,堆垛机技术落后必将成为限制我国自动化立体仓库发展的瓶颈,使我国在国际物流业竞争中处于不利地位。
鉴于以上因素,发展堆垛机技术有积极意义。
1.2 有轨巷道堆垛机的发展现状有轨巷道堆垛起重机是随着立体仓库的出现而发展起来的专用起重机,通常简称为堆垛机。
其主要用途是在高层货架仓库的巷道内沿轨道运行,将位于巷道口的货物存入货格,或者相反,取出货格内的货物运送到巷道口,完成出入库作业。
20世纪70年代初期,我国开始研究采用巷道式堆垛机的立体仓库,1980年我国第一座自动化立体仓库在北京汽车制造厂投产,从此自动化立体仓库在我国得到了迅速发展。
据不完全统计,到目前已建成三百余座。
堆垛机做为立体仓库中最重要的起重运输设备,也得到了较快的发展。
早期的堆垛机是在桥式起重机的起重小车上悬挂一个门架,利用货叉在立柱上的上下运动及立柱的旋转运动来搬运货物,通常称之为桥式堆垛机。
1960年左右在美国出现了巷道堆垛机,这种堆垛机是在地面的导轨上行走,利用货架上部的导轨防止倾倒。
随着立体仓库的发展,巷道堆垛机逐渐替代了桥式堆垛机。
随着计算机控制技术和自动化立体仓库的发展,堆垛机的应用越来越广泛,技术性能越来越好,高度也在不断增加,到1970年实现了由货架支承的高度为40米的堆垛机。
堆垛机的运行速度也不断提高,目前堆垛机水平运行速度可达200m/min,起升速度高达120m/min,货叉伸缩速度达50m/min。
2004年国际物流综合展览会上推出的超高效能巷道堆垛机“H-V1”,走行速度500m/min,加减速0.5G,处理能力每小时500箱,实现了自动化立体仓库存取效率的飞跃。
80年代初期,巷道堆垛机的运行能力主要由机械的速度模式来决定,速度控制是将子母电机或变极电机进行复合,机械式地进行速度切换来控制高速、低速运行。
因此,最高行走速度不超过100m/min,最高升降速度不超过20m/min,在高速化上受到了制约。
于是,在速度控制方面采用了直流电机的电压切换控制方式,使巷道堆垛机的最高行走速度达到125m/min,最高升降速度达到30m/min。
但是,伴随高速化的另一个重要问题是停止,为了滑动停止就必须降到很低的速度。
当进行速度切换时,由于急加减速而形成的或是由于制动停止而引起的冲击,诱发了机械的振动。
现代堆垛机多使用变频调速,速度控制更加平稳,解决了变速时的冲击问题,但是在堆垛机制动器抱闸停止时,也会产生冲击,在堆垛机机架较高的情况下,造成机架晃动,目前只能通过改善控制减小冲击,尚无更好的解决办法。
目前,我国巷道堆垛机的性能参数和可靠性有待进一步提高。
国产堆垛机的质量相对国外堆垛机而言差距较大,为使国产堆垛机赶超国际水平,应加强自主研究和开发。
1.3 本课题设计任务及要求此堆垛机用于机械加工工厂的毛坯、零件仓库,仓库货架总高度为10m,货物单元长、宽尺寸为1200x1000mm,额定负载800kg,最高行走速度120m/min,最高升降速度30m/min,最高货叉速度30m/min,首层货架高度600mm,负载单元器具为托盘或货箱,货叉数为双货叉,每小时出入库20次,平均工作周期3min。
本次毕业设计对堆垛机的机械结构进行设计,主要包括门架结构、行走机构、升降机构、货叉伸缩机构。
设计出更合理堆垛机门架结构,在保证其强度及刚度条件下尽量减轻整机重量,同时,设计出能减轻堆垛机制动时晃动的辅助天轨制动装置和更加简单可靠的断绳保护装置。
2 堆垛机总体方案的确定堆垛机工作于立体仓库货架之间,为节省空间,加大有限空间存货量,现代立体仓库货架间距做的很窄而高度很高。
堆垛机在此环境下工作,决定其整体结构高而窄,为防止倾倒,将堆垛机行走轨道设计成上下双轨,下部地轨起支撑和引导作用,上部天轨可支持堆垛机直立行走,保证不发生倾倒事故。
高而窄的结构也造成堆垛机沿高度方向刚度不足,在起停过程中振动严重,会延长定位时间,影响效率,也会造成堆垛机定位不准确,无法正常工作。
为减轻刚度不足造成的影响,堆垛机设计中要非常注意机构的动刚度。
2.1 有轨巷道堆垛机门架结构选型按传统门架结构形式堆垛机可分为双立柱有轨巷道堆垛机和单立柱有轨巷道堆垛机:(1)双立柱有轨巷道堆垛机双立柱有轨巷道堆垛机由两根立柱、上横梁、下横梁和带货叉的载货台组成,立柱、上横梁和下横梁组成一个长方形的框架,一般称为机架。
这种堆垛机的最大优点就是强度和刚性都比较好,能快速起、制动,并且运行平稳。
一般用在起升高度较高、起重量较大和水平运行速度较高的立体仓库中,其缺点是自重较大。
(2)单立柱有轨巷道堆垛机单立柱有轨巷道堆垛机的机架由一根立柱、下横梁和上横梁组成。
立柱多采用型钢或焊接制作,立柱上附加导轨。
整机重量较轻,消耗材料少,因此制造成本相对较低,但刚性稍差。
由于载货台和货物对立柱有偏心作用,以及行走、制动时产生的水平惯性力作用,使单立柱有轨巷道堆垛机在使用上有较大的局限性。
不适于起重量大和水平运行速度高的堆垛机。
通过对比分析,本设计中堆垛机应用于机械零件及毛坯的搬运,受力较大。
单立柱堆垛机结构刚度小,设计大刚度门架较困难。
且本设计针对加大仓库存货量的中型仓库,库高为10米,单立柱结构做到10米高,会显著提高成本,不够经济。
故本设计采用双立柱有轨巷道堆垛机,这种堆垛机强度和刚性都比较好,能快速起、制动,并且运行平稳。
用在起升高度较高、起重量较大图2.2 单立柱有轨巷道堆垛机图2.1 双立柱有轨巷道堆垛机和水平运行速度较高的立体仓库中,符合本设计的任务要求。
2.2 货叉伸缩机构2.2.1 货叉结构货叉伸缩机构是堆垛机存取货物的执行机构,置于堆垛机载货台上,可以横向伸缩以便向两侧货格送入或取出货物。
一般按叉子的数量分为单叉货叉,双叉货叉和多叉货叉,其中多叉货叉多用在特长货物的堆垛。
由于工作需要,堆垛机货叉在收回状态下的长度要小于巷道的宽度,但伸展后的长度却要大大长于巷道宽度。
为了从结构上实现这个要求,必须采用多级伸缩式货叉,目前最常用的是3级直线差动式货叉。
底叉固定在载货台上,动力装置安装在底叉上,通过传动机构驱动中叉相对底叉运动,中叉和上叉之间装有直线差动机构,使中叉相对底叉运动时,上叉相对中叉以2倍速运动,从而实现大距离伸叉的要求。
2.2.2 中叉板的驱动中叉的运动是通过安装在底叉板或载货台上的电动机和传动机构驱动执行机构实现的,传动方案有齿轮齿条传动和链条传动。
1.齿轮齿条式伸缩叉如图2.3,电动机及减速机构安装在载货台上,齿条固定在中间叉上,齿轮固定在载货台中部,驱动齿条从中点,向左或向右移动大约自身长度的的一半。
前叉可以从中间叉的中点,在链条或钢丝绳驱动下向左或向右伸出比自身稍长的长度。
图2.3 齿轮齿条式伸缩叉伸缩机构2.链条链轮式伸缩叉如图2.4,固定叉安装在载货台上,固定货叉、中、上叉之间由链轮链条进行连接,电动机通过驱动链轮由链条带动中间叉运动,从固定叉中点向左或向右伸缩,在中叉向左或向右伸缩时,由另外两条链带动上叉以三倍速度伸缩。
图2.4 链条式货叉伸缩机构分析以上两方案,链条式货叉伸缩机构采用链轮链条执行动作,链轮链条机构整体尺寸较大,由图中也可以看到,链条数较多,空间布置不便,容易造成链条间的干涉,传动中有一定的速度波动,货叉位置控制难以做到很精确,不利于检测。
齿轮齿条式货叉伸缩机构采用齿轮齿条执行动作,速度平稳,结构简单紧凑,齿轮齿条耐用度高,减少维修辅助时间。
鉴于以上优点,本设计采用齿轮齿条式货叉伸缩机。
2.3 起升机构2.3.1 起升机构形式起升机构通过支架用螺栓固定在立柱下端,本设计可参考方案有电动葫芦起升机构,卷扬机起升机构以及链条起升机构。
1.电动葫芦起升机构钢丝绳由电动葫芦卷筒引出,通过上横梁的两个固定滑轮与载货台上的动滑轮连接,如图2.5.电动葫芦作为起升机构应用很广泛,但在调速方面,市场上目前暂无可调频调速的电动葫芦,需要专厂定制,且市场成熟度不是很好,在一定程度上增加成本。
由于本设计中堆垛机对定位要求很高,电动葫芦由于调速上的缺陷难以做到很精确定位,市场上现有的产品升降速度也不能满足任务要求,故不采用。
2.吊链式起升机构采用链轮与链条起升,该形式在结构上由于升降电机装置上置,使堆垛机重心上移,增加了不稳定因素。
链传动本身不稳定,工作中产生振动和脉动,且工作一段时间吊链伸长量超标(5%),必须更换,增加了成本和辅助时间,对于高度较高的堆垛机设备不是最合理的选择,本设计不采用。
图2.6吊链式起升机图2.5 电动葫芦起升机构3.卷扬机起升机构该机构可采用专业起重用调频调速电机,通过直连式或联轴器与减速器轴连接,输出轴上安装卷筒,卷筒是非标件,可根据具体起升高度自行设计。
根据市场上现有堆垛机设备调查,目前市场上巷道堆垛机多采用这种升降装置,故本设计采用,其结构如图2.6。
钢丝绳3缠绕在卷筒8上,由卷筒引出后通过上横梁的固定滑轮2与载货台上的动滑轮10连接,卷筒在电动机驱动下转动,通过控制电动机输出转速可以准确控制载货台位置。
1-机架 2-定滑轮 3-钢丝绳 4-电动机 5-支座 6-联轴器 7-减速器 8-卷筒图2.6 卷扬机起升机构2.3.2 卷扬机构的布置方案卷扬机典型布置方案有3种,如图2.7。
(a)图采用的是平行轴圆柱齿轮减速器,它将电动机和卷筒布置在减速器的同侧,这种布置型式结构最紧凑,整套机构外形尺寸最小。
但它要求减速器的中心距具有一定的数值。
(b)图采用的也是平行轴圆柱齿轮减速器,它将电动机和卷筒布置在减速器的两侧,这种布置型式适用于减速器的中心距不够大,整套机构的宽度尺寸不受限制的情况。
(c)图采用的是直交轴的减速器,它是在整套机构的长度尺寸不受限制的情况下采用的一种布置型式。
图2.7 卷扬机布置形式鉴于巷道堆垛机的工作环境限制,选择图(a)的布置形式,其结构紧凑,也便于安装。
2.3.3 安全机构为了保证堆垛机正常工作,确保载货台上人员、货物的安全,当载货台工作中发生断绳事故时,必须自动可靠地将载货台及时停止,避免发生溜车或坠车事故因此,载货台必须装有安全机构。