上位机和多台下位机的485通信
485 多主机通信机制
485 多主机通信机制485多主机通信机制,是指通过一种基于以太网的通信协议,实现多个主机之间的高速数据传输和通信的技术。
本文将详细介绍485多主机通信机制的原理、特点和应用。
一、485多主机通信机制的原理485多主机通信机制是基于RS-485通信协议的,RS-485是一种串行通信协议,支持多主机通信。
它采用差分信号传输方式,具有抗干扰能力强、传输距离远、传输速率高等优点,适用于工业环境中的数据通信。
在485多主机通信机制中,每个主机都有一个唯一的地址。
当一个主机要发送数据时,它会先发送一个起始信号,然后将数据按字节发送出去。
其他主机会监听总线上的信号,如果检测到起始信号,就会暂时放弃总线的控制权,等待发送数据的主机发送完毕后再参与通信。
在485多主机通信机制中,还有一个重要的概念是主机的优先级。
每个主机都有一个优先级,优先级高的主机具有更高的控制权,在总线上能够更快地发送数据。
当多个主机同时要发送数据时,优先级高的主机会优先发送,而优先级低的主机会等待。
二、485多主机通信机制的特点1. 高速传输:485多主机通信机制支持高速数据传输,最高传输速率可达10Mbps,能够满足实时性要求高的应用场景。
2. 长距离传输:485多主机通信机制采用差分信号传输方式,传输距离可达1200米,适用于工业环境中远距离的通信需求。
3. 抗干扰能力强:485多主机通信机制采用差分信号传输方式,能够有效抵抗电磁干扰和噪声干扰,保证数据传输的可靠性。
4. 多主机通信:485多主机通信机制支持多个主机同时进行通信,每个主机都有一个唯一的地址和优先级,能够实现灵活的数据交互和控制。
三、485多主机通信机制的应用1. 工业自动化:485多主机通信机制广泛应用于工业自动化领域,用于实现各种设备之间的数据通信和控制,如PLC、传感器、执行器等。
2. 智能楼宇:485多主机通信机制可用于智能楼宇系统中,实现楼宇设备之间的数据传输和控制,如照明控制、空调控制、安防监控等。
RS485多机通信一主机两个下位机

一、原理图
二、程序
1、上位机程序
#include "main_host.h"
/*延时t毫秒*/
void delay(uint t)
{
uint i;
while(t--)
{
/*对于11.0592M时钟,约延时1ms */
}
/*主程序*/
void main()
{
uchar i = 0;
uchar addr_tmp;
uchar data_tmp;
init_serial();//串口初始化
EA = 0;//关闭所有中断
/*发送地址帧并接收应答信息,如果接收的信号与发送的地址信息不同,则重新发送地址帧*/
P0=0xff;
addr=P0; //下位机地址初值(第一个下位机地址)
P1=addr;
/*进入设备应答*/
while(1)
{
SM2 = 1;//只接收地址帧
/*如果接收到的地址帧不是本机地址,则继续等待*/
addr_tmp = addr-1;
while (addr_tmp!=addr)
{
addr_tmp=ReciveUart();
}
/*发送本机地址作为应答信号,准备接收数据*/
#define uint unsigned int
/*握手信号宏定义*/
#define DataCMD 0x55//接收成功
#define ERR 0xaa//接收错误
#define BASE_ADDR 0x51 //下位机地址基址
单片机多机串口的通信
摘要本文详细介绍了基于RS-485总线的单片机与多台单片机间的串行通信原理、实现方法和相应的通信硬件、软件设计。
该设计是由单片机与单片机组成的主从控制系统,其中单片机做为上位机对下位单片机是实现控制和监视功能。
它包括通信和控制两个功能模块。
单片机作为下位机在整个系统中属于从属地位,主要用来接收上位机的命令。
由于此通信的单片接口是RS232的9针接口,且下位机数目有限(32台)。
所以本设计采用了RS485总线以及RS232转RS485的协议芯片以满足长距离多机通信,本文讨论了总线接口转换、主从式通信协议设计方法,给出了采用中断式处理的通信过程流程图,并叙述了设计过程中必备的绘图软件Protel DXP的应用,以及编辑源代码软件keil uVision2的应用,实现了单片机对多个单片机组成采集终端的通信与管理。
关键词:单片机单片机RS-485 通信AbstractThe communication 、realized method and corresponding design of hardware and software between 单片and multiple MCUs based on RS-485 is described in detai in the article. This design instroduces a pincipal and subordinate control system which is composed of 单片and single chip. Divided from its function, it includes two parts: communication and control, in which 单片is used as master, and MCUs is used as slave so as to receive the single order from the master.The bus interface conversion and the design of master-slave communication protocol is introduced and The program flowchart of communication with interrupt process is also given. In the process of design, the use of unnecessary painter software and code editor software is depicted so that realize the communication and administration between 单片and multiple MCUs which composed collection terminal.Keywords: 单片MCUs RS-485 communication目录第一章绪论 (1)第二章课题实施方案 (2)2.1 系统硬件设计 (2)2.2 系统软件设计 (3)第三章硬件电路设计 (9)3.1 C51单片机结构 (9)一CPU结构 (10)二ROM存储器 (11)三I/O端口 (11)四定时器/计数器 (12)五中断系统 (13)3.1.2 51单片机引脚功能及其连接 (13)3.1.3 51 中断系统 (15)3.1.4 C-51的串行通信 (15)3.2.1串行接口RS232结构与引脚功能 (21)3.3 Protel DXP 2004原理图设计 (23)3.3.1 Protel 2004的基本操作 (23)3.3.2绘制原理图 (25)3.3.3制作芯片原理图库 (27)第四章软件电路设计 (30)4.1 系统的通信协议 (31)4.2 C51编程实现单片机与单片机之间的串行通信 (31)4.3 Windows集成开发环境uVision2 (35)4.3.1启动uVision2 (35)4.3.2创建程序 (36)总结 (41)致谢 (42)参考文献 (43)第一章绪论单片机由于其具有控制功能强、设计灵活和性能价格比高的特点。
MCGS与RS485通讯协议设定

实验名称:《MCG实现RS485通信协议设定》一、实验目的:1、实现MCGS! RS485通信协议的互相配合。
2、了解RS485通信协议的工作原理。
二、实验内容:1、通信系统硬件设计:RS485有多个引出线接口,并且可以多个驱动器和接收器,因此可以实现一台PC与多台单片机间的串行通信。
2、通信协议:上位机的信息可以传送到各个下位机或指定的下位机,下位机发送的信息只能为上位机所接收,各个下位机之间不能直接通信。
3、串行通信软件设计:上位机:上位机软件采用VC6.0编程实现。
下位机:下位机与上位机的通信采用中断方式实现。
三、实验步骤1、运行MCG软件在设备管理中调出以下窗口2、通用串口设备属性编辑:检查(ig |确认职消国|帮朋凹3、设备属性设置:『垂疣匡I通遇逗援I谟脊调迖I魏擴处連说輕属性若啜皆朋性恒1商珈居性1茯芒谗备也部巨性曲线帮羽I查右榻各在繚菲助遼备塔粉说吉■(]虹何甲显控制仗杖始工■!服右 1 -启载呈•十'乘zJfcfST朋[my] 1 UU愎晶地址»电诒号吗检査购隔认(X) 収消IO 却助UAJKt^snatTi — I 術番HI县本屈性|迪逍連堆[萸里<工]救据处迎|通i直兮对五藪攥对隸逋道■■直通道弦聖0D通倍伏志1 1.0鈕修改掃击2Z.U仪表冀型3Z4.0测爭悄*1U.0第一振普妆寺5U.0曲1服書桟六取消口帮期U1J4、属性设置完成,然后用手捂住测温计,观察PC机上显示的温度数值。
四、实验小结:[温馨提醒:合同协议是经验性极强的领域,无法思考和涵盖全面,最好找专业律师起草或审核后使用。
范文供参考,期待你的好评与关注]。
485 总线多机通信控制装置主电路设计原理

485 总线多机通信控制装置主电路设计原理
485 总线多机通信控制装置主电路的设计原理如下:
1. 串口通信模块:485 总线多机通信控制装置主电路通常包含一
个或多个串口通信模块,用于与外部设备进行数据交互。
这些串口通
信模块可以支持不同的通信协议,如 RS-232、RS-485 等。
2. 微控制器或处理器:主电路中的微控制器或处理器负责控制整
个系统的运行。
它接收来自串口通信模块的数据,并根据预设的通信
协议进行解析和处理。
同时,它还可以发送控制命令到外部设备。
3. 电源管理模块:电源管理模块为整个系统提供稳定的电源供应。
它可以包括电源转换电路、滤波电路和电源保护电路等,以确保系统
在不同的电源环境下正常运行。
4. 数据存储模块:主电路可能包含数据存储模块,用于存储系统
配置信息、通信数据等。
这可以是内部的 Flash 存储器、EEPROM 或
外部的 SD 卡等。
5. 扩展接口:为了满足不同的应用需求,主电路可能提供一些扩
展接口,如 GPIO 接口、SPI 接口、I²C 接口等。
这些接口可以用于连
接外部传感器、执行器或其他扩展模块。
6. 状态指示模块:主电路还可以包括状态指示模块,用于显示系统的运行状态,如电源指示、通信指示等。
在设计 485 总线多机通信控制装置主电路时,需要考虑到通信协议的兼容性、电气特性、抗干扰能力等因素。
同时,还需要根据具体的应用场景和需求进行定制化设计,以满足特定的功能和性能要求。
485多个设备连接方法
485多个设备连接方法设备连接是指通过网络或其他通信方式将多个设备连接在一起,形成一个整体的网络或系统。
在现代科技发展的背景下,设备连接已经成为许多行业的关键技术之一,例如物联网、智能家居、工业自动化等。
下面将介绍一些常见的设备连接方法。
1.有线连接:最常见的设备连接方法之一是使用有线连接,通过网线、串口、USB等物理介质将设备连接在一起。
这种连接方法通常稳定可靠,并且传输速度较快。
例如,计算机和打印机之间使用USB接口连接,实现打印功能。
2.无线连接:无线连接是一种不需要物理介质的设备连接方法。
常见的无线连接技术包括WiFi、蓝牙、NFC等,其主要优点是方便灵活,可以随时随地连接设备。
例如,智能手机和蓝牙耳机之间通过蓝牙技术进行无线连接。
3. 传感器网络:在物联网应用中,传感器网络被广泛应用于数据采集和设备连接。
传感器网络由许多小型传感器节点组成,通过短距离无线通信技术(如ZigBee)将传感器连接在一起。
这样可以实现对环境、设备等信息进行采集和传输。
4.嵌入式系统连接:在一些特殊应用领域,通过嵌入式系统实现设备连接是一种常见的方法。
嵌入式系统是一种专用的计算机系统,内置在其他设备中,用于控制和连接其他设备。
例如,工业自动化领域的PLC(可编程控制器)通过嵌入式系统和各种传感器、执行器连接在一起,实现对机器和设备的控制。
5.云平台连接:云计算技术的兴起为设备连接提供了新的解决方案。
设备可以通过互联网连接到云平台,将数据传输到云端进行存储和处理。
云平台可以为设备提供统一的接口和管理,实现设备之间的互联互通。
例如,智能家居系统可以通过云平台实现对各个设备的远程控制和管理。
总而言之,设备连接方法多种多样,在不同的应用场景中选择适合的方法对于高效、可靠地实现设备之间的连接至关重要。
随着科技的不断发展,设备连接技术也将不断创新和进步,为人们带来更加便利和智能的生活、工作环境。
485自定义通讯协议

00字节4
00字节5
00字节6
08字节7
F1字节8FF其中:
第1个字节02为采集模块地址
第2个字节04为读取数据功能码
第3~6个字节00 00 00 08代表读取采集模块指令码
第7~8个字节F1 FF为采集模块设备的校验码
2.电压采集时发送指令为:
字节1
03字节2
04字节3
00字节4
00字节5
485
本项目通过485与采集模块通讯,为了提高系统的可靠性,上位机与下位机DSP均能实现数据的采集和显示。上位机数据采集与ADAM4117和ADAM4118的数据采集采用485通讯模式。
其中,485通讯默认波特率9600,采用modbus协议。
一、上位机发送
1.温度采集时发送指令为:
字节1
02字节2
xx3
10
14
xx15
xx16
xx17
xxቤተ መጻሕፍቲ ባይዱxx5
xx6
xx7
xx
18
xx数据
19
xx20
-21
-8
xx9
xx10xx11xx数据
其中:
第1个字节为02,表示接收到的数据为温度数据;
03,表示接收到的数据为电压数据。
第2个字节04,可以作为校验使用;
第3个字节10,可以作为校验使用。
第4~19个字节,共16个字节,为8个通道的温度或电压数据。即2个字节表示一个通道的数据值。
00字节6
08字节7
F0字节82E其中:03为采集模块地址
04为读取数据功能码
第3~6个字节00 00 00 08代表读取采集模块指令码
第7~8个字节F0 2E为采集模块设备的检验码
485通讯注意事项
485通讯注意事项为了让主机可以比较"从容"地切换到接收状态,从机接收到报文后不应该马上回答,而要至少等待双方约定的一个时间(比如20ms),这其实也应当是RS-485通信的一个参数。
使用全双工RS-422就没有这个问题。
有一些RS232到RS485的接口转换器需要用RTS信号来控制发送和接收状态切换,由于PC机很难像单片机那样精确地判断最后一位从移位寄存器发出去了(单片机对有的UART 可以用中断,或者笨笨地定时+查询标志等方法),所以经常发生下位机收不好最后一个字节或者上位机收不好第一各字节的情况。
有人采取上位机正常报文后面加无用字符(比如0xFF)的办法来凑合。
虽然现在有RS232到RS485的收发自动切换的转接器,但它内部其实是用单稳态触发器来实现的,为了适应不同波特率,切换仍然有一个延迟,波特率较高的时候下位机回答太快仍然有可能第一个字节出错。
所说的20ms只是一个举例,根据波特率等情况当然可以适当改变。
但是,正规的RS485规约应该要规定这个帧间空闲间隔的(比如IEC870-5规定是33bit)。
实际通信的实时性主要由轮询的间隔以及超时的处理来决定,附加几毫秒的延时并不很重要。
实际使用RS485通信最常遇到倒就是收发切换的问题,要想解决好,一是上位机从发到收的切换要尽量快(尽可能使用UART硬件自动控制RTS、发送完成中断或者精确定时),二是下位机要略位"宽容"一点。
一、如何布线走线走得好,可以很大程度减少干扰的影响,提高通讯的可靠性,但我们在实践中往往对此认识不足。
如为了走线方便,把网线放在电源线的线槽里,或在天花板走线时经过日光灯等干扰源,这样走线是不对的。
实际上干扰源对相邻网线的干扰,主要是通过磁场和电场的作用,按照电磁理论,干扰源对网线的感应与距离的平方成反比,因此,网线离干扰源那怕远离10厘米,网线受到的干扰都会明显减弱。
综上所述,走线应遵循两个原则:远离电源线,日光灯等干扰源;当网线不能与电源线等干扰源避开时网线应与电源线垂直,不能平行,并采用质量高的双绞线走线。
上下位机通信方法
上下位机通信方法
上下位机通信是指在自动化控制系统中,上位机和下位机之间进行数据交换和通信的方式和方法。
常见的上下位机通信方法有以下几种:
1. 串口通信:使用串行通信接口(如RS232、RS485等)实现上下位机之间的数据传输。
这种通信方法简单易实现,但传输速度相对较慢。
2. 网口通信:利用以太网接口进行通信,可以使用TCP/IP协议或UDP协议进行数据传输。
网口通信速度较快,适用于大数据量或实时性要求较高的场景。
3. USB通信:通过USB接口进行数据传输和通信。
USB通信的优点是便携性强,适用于移动设备或一体机等场景。
4. 无线通信:利用无线模块(如蓝牙、Wi-Fi、ZigBee等)实现上下位机之间的通信。
无线通信可以实现远程控制和监测,但受环境影响较大,通信稳定性相对较差。
5. CAN总线通信:针对工控领域的通信协议,主要用于机器人、工业自动化等领域。
CAN总线通信速度快,可实现多节点通信,适用于复杂系统中的设备间通信。
6. MQTT通信:一种轻量级的消息发布/订阅协议,适用于物联网设备之间的通信。
MQTT通信具有低带宽和开销、可靠
性强、支持海量设备等优点。
在实际应用中,选择哪种上下位机通信方法,需要根据具体的应用场景和要求进行选择和配置。
多点温度监控系统的设计.

多点温度监控系统的设计目前许多场合都要对温度进行控制。
如仓库,不同的储藏室储存物品的温度都不同;再比如医院,为了使病人的治疗效果最好,需要对每一个病房的温度进行控制。
该文研究的多点温度监控系统能够对多个位置的温度进行设置、检测,根据温度设置值与检测值来控制调温设备运转,调节温度。
l系统的总体结构及功能本系统的总体结构框图如图1所示,为了满足多通道数据采集和处理,系统采用了一台上位机和多个下位机的集总式结构。
上位机采用AT89目前许多场合都要对温度进行控制。
如仓库,不同的储藏室储存物品的温度都不同;再比如医院,为了使病人的治疗效果最好,需要对每一个病房的温度进行控制。
该文研究的多点温度监控系统能够对多个位置的温度进行设置、检测,根据温度设置值与检测值来控制调温设备运转,调节温度。
l 系统的总体结构及功能本系统的总体结构框图如图1所示,为了满足多通道数据采集和处理,系统采用了一台上位机和多个下位机的集总式结构。
上位机采用AT89S51单片机,下位机采用AT89C2051单片机。
上位机与下位机之间采用RS485总线通信。
其中上位机系统配置液晶显示屏、按键。
按键用于调整各个点的预置温度和系统时间,查询各个点的预置温度值、实际温度值以及调温设备运行情况,输入下位机的控制信息。
液晶显示屏用于显示系统时间,以及各点的预置温度值、实际温度值和调温设备运行情况,如1 min内没有任何操作,则液晶显示屏上开始循环显示各个点的实际温度值、预置温度值以及调温设备运转情况,每一个点的数据在液晶屏上显示的时间是8 s。
下位机负责温度采集和控制调温设备运转,温度传感器采用DSl8820。
上位机首先将预置温度值发送到下位机,下位机将实际温度与预置温度进行比较后输出调温设备控制信号,并将实际温度与调温设备运转状态发送到上位机。
2 硬件电路设计2.1 下位机电路设计下位机电路主要由三部分构成:温度采集电路、RS 485总线接口电路、调温设备的控制电路,其电路原理图如图2所示。
485多个设备连接方法

485多个设备连接方法随着物联网技术的发展,越来越多的设备可以连接到互联网,实现自动化、远程控制和互联互通。
本文将介绍485多个设备的连接方法,主要包括RS-485通信协议和连接方式。
RS-485是一种常用的工业通信协议,采用差分传输方式,在长距离和噪声环境中能够提供稳定可靠的数据传输。
RS-485总线可以连接多个设备,形成一个网络。
下面是几种常见的485多个设备连接方法:1.令牌环形拓扑结构:适用于设备之间需要严格按照优先级进行通信的场景。
每个设备在总线上都有一个唯一的地址,设备按照优先级依次发送数据,其他设备在接收到自己的地址时进行响应。
令牌轮转,直到每一个设备都完成了自己的通信任务。
2.星形拓扑结构:适用于数据通信需要中心节点进行集中控制的场景,例如集中控制各个节点的传感器或执行器。
所有设备都连接到中央设备,中央设备负责控制和管理设备之间的通信。
3.总线拓扑结构:适用于设备之间需要相互通信且不需要中央控制的场景。
所有设备都连接到同一个总线上,通过总线上的数据线进行通信。
设备之间可以通过地址识别来进行通信,也可以通过总线上的广播方式进行群发消息。
4.树状拓扑结构:适用于设备之间需要分层次进行通信的场景。
每一层设备都连接到上一层设备上,最上层设备负责控制和管理下一层设备的通信。
在485多个设备连接中,还需要考虑设备的物理连接方式,以确保信号传输的质量和稳定性。
1.点对点连接:每个设备都与总线上的一个设备直接相连,利用点对点连接的方式进行数据通信。
这种连接方式简单可靠,但是对于连接数量较多的情况不太适用。
2.多主从连接:一个或多个主设备控制多个从设备的连接。
主设备负责控制总线上的通信,从设备负责接收和发送数据。
这种连接方式适用于需要集中控制和管理设备的场景。
3.多级连接:将设备按照一定的层次进行连接,形成多级连接的结构。
上一级设备负责控制和管理下一级设备的通信。
这种连接方式适用于设备连接数量较大且需要分层次管理的场景。
RS-485多主机通信的组网方式

RS-485多主机通信的组网方式________ 武汉波仕电子有限公司传统的RS-485组网方式只允许一个主机(上位机),但是在许多情况下要求有多台RS-485主机进行组网。
本文以波仕电子的产品为例介绍两种RS-485多主机通信产品及其组网方式----采用RS-485共享器和采用RS-485交换机。
采用共享器可以允许2台主机,而且可以对这2太主机的发送信号按照发送顺序进行优先排序,避免同时发送导致的系统瘫痪。
而采用交换机可以允许4台主机(上位机)控制下位机,而且光电隔离,但是不能够2个上位机同时发送。
1、采用共享器的RS-485多主机通信方式波仕电子的型号为HUB2485Z的RS-485智能共享器用于两个RS-485主机(上位机)共同控制一个RS-485下位机的通信连接。
HUB2485Z使RS-485总线从传统的允许一个主机扩展到允许2个主机。
HUB2485Z已经有2个上位机插座(DB-9针并且配接线端子)和1个下位机的接线端子,无需修改软件、5V供电。
HUB2485Z适用于两台上位机的RS-485口同时驱动一台下位机的RS-485口。
图1 RS-485的2对1智能共享器HUB2485Z的外型为DB-9(针)/ DB-9(针)转接盒大小,其中DB-9针的RS-485的引脚分配同波仕485A型号的转换器并且配接线端子。
两个DB-9针的上位机RS-485口,如图RS-485(1)和RS-485(2)是完全一样的,可以互换。
下位机RS-485为接线端子,位于如图产品的上侧面,与电源接线端子在一起。
HUB2485Z需要外接5V电源,配套提供。
波仕HUB2485Z智能RS-485集线器能够识别两个上位机RS-485(1)和RS-485(2)的发送顺序,避免同时发送导致的系统瘫痪。
也就是说,即使两个上位机正在同时发送,HUB2485Z会选取发送开始时间领先的上位机正确发送数据,而只有等到这一个上位机的数据发送完毕后,另外一个上位机才可以开始发送数据。
RS-485的多机通信方案
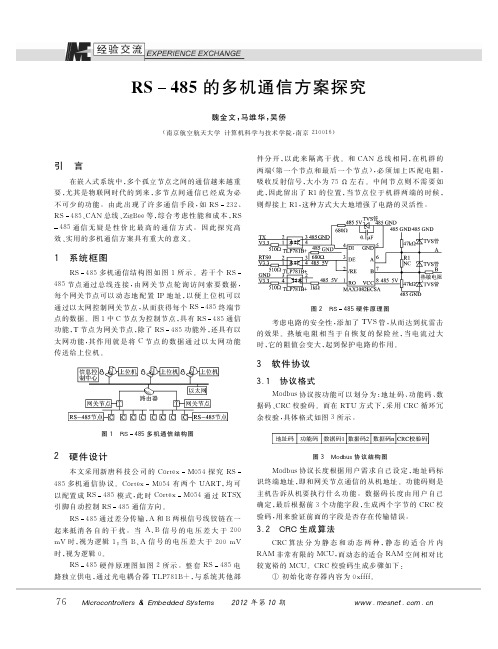
76 Microcontrollers &Embedded Systems 2012年第10期www.mesnet.com.cn RS 485的多机通信方案探究魏金文,马维华,吴侨(南京航空航天大学计算机科学与技术学院,南京210016)引 言在嵌入式系统中,多个孤立节点之间的通信越来越重要,尤其是物联网时代的到来,多节点间通信已经成为必不可少的功能。
由此出现了许多通信手段,如RS 232、RS 485、CAN总线、ZigBee等,综合考虑性能和成本,RS485通信无疑是性价比最高的通信方式。
因此探究高效、实用的多机通信方案具有重大的意义。
1 系统框图RS 485多机通信结构图如图1所示。
若干个RS485节点通过总线连接,由网关节点轮询访问索要数据,每个网关节点可以动态地配置IP地址,以便上位机可以通过以太网控制网关节点,从而获得每个RS 485终端节点的数据。
图1中C节点为控制节点,具有RS 485通信功能,T节点为网关节点,除了RS 485功能外,还具有以太网功能,其作用就是将C节点的数据通过以太网功能传送给上位机。
图1 RS 485多机通信结构图2 硬件设计本文采用新唐科技公司的Cortex M054探究RS485多机通信协议。
Cortex M054有两个UART,均可以配置成RS 485模式,此时Cortex M054通过RTSX引脚自动控制RS 485通信方向。
RS 485通过差分传输,A和B两根信号线铰链在一起来抵消各自的干扰。
当A、B信号的电压差大于200mV时,视为逻辑1;当B、A信号的电压差大于200mV时,视为逻辑0。
RS 485硬件原理图如图2所示。
整套RS 485电路独立供电,通过光电耦合器TLP781B+,与系统其他部件分开,以此来隔离干扰。
和CAN总线相同,在机群的两端(第一个节点和最后一个节点),必须加上匹配电阻,吸收反射信号,大小为75Ω左右。
中间节点则不需要如此,因此留出了R1的位置,当节点位于机群两端的时候,则焊接上R1,这种方式大大地增强了电路的灵活性。
到上位机的通讯协议
到上位机的通讯协议
上位机与下位机之间的通讯协议通常是通过串行通讯或者网络
通讯进行的。
串行通讯协议包括常见的RS-232、RS-485、Modbus等,而网络通讯协议则包括TCP/IP、UDP、HTTP等。
这些通讯协议在工
业控制、自动化领域中被广泛应用。
在串行通讯中,RS-232是一种较为常见的标准,它定义了串行
通讯的物理接口和信号规范。
RS-485则是一种多点通讯的标准,适
用于远距离通讯和多节点通讯。
Modbus是一种常见的工业领域通讯
协议,包括Modbus RTU和Modbus TCP两种形式,用于在工业控制
系统中传输数据。
在网络通讯中,TCP/IP协议是互联网和局域网中最常见的协议
之一,它提供了可靠的、面向连接的数据传输。
UDP协议则是一种
无连接的通讯协议,适用于实时性要求较高的数据传输。
HTTP协议
是超文本传输协议,用于在客户端和服务器之间传输超文本。
除了上述常见的通讯协议外,还有许多其他的通讯协议,如
CAN总线、Ethernet、Profibus等,它们在不同的应用场景中发挥
着重要作用。
总的来说,不同的通讯协议适用于不同的应用场景和需求,选择合适的通讯协议对于建立可靠的上位机与下位机通讯至关重要。
上位机和下位机的通讯协议
上位机和下位机的通讯协议随着信息技术的发展,计算机系统在各个领域中的应用越来越广泛。
在许多实际应用中,需要将上位机和下位机进行通信,以完成数据的传输和控制。
上位机和下位机是指在一个系统中,上位机负责处理数据和控制逻辑,而下位机则负责执行具体指令和操作硬件设备。
两者之间的通信协议起着非常重要的作用,它决定了数据的传输方式、格式和规则。
一种常见的上位机和下位机通信协议是Modbus协议。
Modbus 协议是一种串行通信协议,被广泛应用于工业自动化领域。
它定义了上位机和下位机之间的通信格式和规则,支持多种物理传输介质,如串口、以太网等。
Modbus协议采用主从结构,上位机作为主机发送指令,下位机作为从机接收并执行指令。
在Modbus协议中,上位机可以向下位机发送读取命令,以获取下位机的数据;也可以发送写入命令,以向下位机发送控制指令。
下位机接收到上位机的命令后,根据指令的类型和参数进行相应的处理,并将结果返回给上位机。
除了Modbus协议,还有其他许多通信协议可用于上位机和下位机的通信,如CAN总线协议、RS485协议等。
这些协议各有特点,适用于不同的应用场景。
CAN总线协议是一种广泛应用于汽车电子领域的通信协议。
它采用分布式的总线结构,可以连接多个下位机设备。
CAN总线协议具有高速传输、抗干扰能力强等优点,适用于复杂的汽车电子控制系统。
RS485协议是一种串行通信协议,适用于多点通信。
它可以连接多个下位机设备,支持长距离传输,具有抗干扰能力强的特点。
RS485协议广泛应用于工业自动化、楼宇自控等领域。
除了这些通信协议,还有许多其他的协议可供选择,如Profibus、DeviceNet等。
这些协议根据不同的应用场景和需求,提供了丰富的功能和灵活的配置。
在设计上位机和下位机通信协议时,需要考虑以下几个方面:1. 通信速度:根据实际需求确定通信速率,以保证数据的及时传输。
2. 数据格式:确定数据的编码格式和传输方式,以确保数据的正确解析和处理。
485 多主机通信机制
485 多主机通信机制485多主机通信机制是指通过485总线实现多个主机之间的通信。
485总线是一种串行通信协议,能够实现多个设备之间的数据传输。
在485多主机通信机制中,每个主机都可以作为发送方和接收方,通过485总线进行数据的传输和接收。
在485多主机通信机制中,每个主机都有一个唯一的地址,通过地址来区分各个主机。
当一个主机需要向其他主机发送数据时,它首先会向总线发送一个数据包,包含自己的地址和要发送的数据。
其他主机会监听总线上的数据,当检测到有数据包时,会根据地址判断是否是自己应该接收的数据包。
如果是,则接收数据,否则忽略。
485多主机通信机制采用的是半双工通信方式,即每个主机在同一时间只能发送或接收数据。
当一个主机发送数据时,其他主机必须等待,直到总线上没有数据传输时才能发送自己的数据。
这样可以避免多个主机同时发送数据导致冲突的问题。
在485多主机通信机制中,数据的传输速率可以根据实际需求进行调整。
一般情况下,数据传输速率较低,通常在几千位每秒到几十万位每秒之间。
这是因为485总线通常用于工业控制领域,对数据传输的实时性和可靠性要求较高,而不是追求高速率。
485多主机通信机制还具有抗干扰能力强的特点。
由于485总线采用差分信号传输,可以有效抵抗电磁干扰和噪声干扰。
同时,485总线还支持多主机并行传输,多个主机可以同时发送和接收数据,提高了通信效率。
在实际应用中,485多主机通信机制被广泛应用于工业自动化控制系统中。
例如,工厂中各个设备之间的数据交换、监控系统与控制器之间的通信等都可以通过485总线来实现。
485多主机通信机制在工业环境中具有稳定性高、传输距离远、抗干扰能力强等优势,因此得到了广泛的应用。
总结来说,485多主机通信机制通过485总线实现多个主机之间的数据传输和通信。
每个主机通过地址来区分并接收自己需要的数据包。
485多主机通信机制具有半双工通信、可调节的传输速率、抗干扰能力强等特点,被广泛应用于工业自动化控制系统中。
多设备使用同一485总线项目使用说明

多设备使用同一485总线项目使用说明使用多设备共享同一485总线可以节省成本并提高设备之间的通信效率。
但是,在实施这种项目之前,需要考虑一些重要的因素和步骤。
首先,确保每个设备都具备485通信接口。
如果设备没有自带485接口,可以通过添加适配器来实现。
适配器会负责将设备的通信接口与485总线连接起来。
接下来,确保每个设备都有唯一的地址。
在485总线上,每个设备都需要有一个唯一的地址以便进行通信。
这个地址通常是一个独立的硬件开关或者通过软件设置。
然后,配置总线终端电阻。
在整个485总线的两端要放置一个电阻来消除信号反射和保证通信的稳定性。
这个电阻通常被称为总线终端电阻,它的大小一般为120欧姆。
接下来,选择合适的总线传输速率。
485总线可以支持不同的传输速率,而选择合适的速率可以提高数据传输的效率。
一般来说,较高的传输速率可以提高通信效率,但也要考虑总线上设备的最大传输速率。
然后,编写设备的通信协议。
在485总线上,设备之间的通信需要遵循一定的协议。
协议通常包括帧头、设备地址、数据和帧尾等信息。
通信协议的制定可以根据具体的项目需求进行。
接下来,实施总线上设备的物理连接。
将每个设备的485接口连接到总线上,并确保连接正确和稳定。
同时要确保总线终端电阻正确放置在总线的两端。
最后,通过编程控制设备的通信。
根据设备的通信协议和项目的要求,编写相应的程序来实现设备之间的通信。
这需要使用适当的软件编程语言和相关的开发工具。
在进行多设备使用同一485总线的项目时,还应该注意以下几点:1.设备之间的通信冲突。
当多个设备同时发送数据时,可能会发生通信冲突,导致数据传输错误。
为了解决这个问题,可以使用仲裁算法来确定优先级。
2.总线噪声。
485总线上可能会存在噪声干扰,导致数据传输错误。
为了减少噪声的影响,可以使用屏蔽电缆和滤波器,并确保总线上的设备具备良好的电磁兼容性。
3.总线长度和数据传输距离。
485总线在理论上可以支持较长的数据传输距离,但实际上会受到电缆质量和信号衰减的影响。
RS485多机通讯的组网方式

RS485多机通讯的组网方式本文先容了以波仕转换器为代表的几种RS-485多机通讯的组网方式:总线式、菊花链式、星形、单环冗余型。
用户可以根据现场的串口设备的位置分布或者可靠性要求来选择。
通讯软件都是一样的,与普通的RS-485总线多机通讯一样。
波仕RS-232/RS-485/RS-422转换器都可将RS-232通讯间隔延长至1.2Km以上(9600bps时)。
都可以用于PC机之间、PC机与单片机之间构成远程多机通讯网络。
波仕的485TC和485TA转换器外形都为DB-9/DB-9转接盒大小,其中DB-9(孔座)一端直接插在9芯RS-232插座(针座)上。
PC机RS-232串行口的DB-9芯连接器引脚分配如下:2-RXD(收),3-TXD(发),5–GND(地)。
产品均无需任何初始化设置!只用到RXD(收)、TXD(发)、GND(地)信号,加上独占的内部零延时自动收发转换技术,确保适合所有软件!RS-485为半双工通讯方式。
RS-422为全双工方式。
485TC为全双工半双工通用型(图1)。
485TA为半双工型(图2)。
均内置600W抗雷击浪涌保护器。
图1波仕485TC图2波仕485TA一、典型的RS-485总线式通讯方式最典型的RS-485多机通讯就是总线式的通讯(图3):所有RS-485节点全部挂在一对RS-485总线上。
实际上还有一根GND 地线。
留意RS-485总线不能够开叉、但是可以转弯。
图3典型的RS-485半双工多机通讯RS-422是全双工通讯方式,也就是说发送(Y、Z)与接收(A、B)是分开的,所以能够同时收发。
RS-422有时也称为“全双工的RS-485”,或者“RS-485的全双工方式”。
总线式的全双工多机通讯图如图4。
留意不是所有的RS-422都支持全双工多机通讯的。
波仕的485C系列转换器是少有的能够支持全双工多机通讯的、而且全双工半双工通用的转换器。
图4典型的全双工多机通讯图二、菊花链式的多机通讯方式这种菊花链式的多机通讯方式(图5)比较少见,但是却有其独特的上风、也有其缺点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引言
在工业现场 ,大多数下位机是单片机系统 ,完成 现场相关过程的实时监控和数据采集 。为了实现生 产过程的集中监测 、控制和管理 ,需要把各台下位机 系统的相关监控信息传输到中心机房 。中心机房和
下位机之间的信息交换有多种方式 ,其中主要考虑 的问题是信息交换的可靠性 、线路复杂性 、距离远近 等因素 。在一些实际应用场合 ,主机和从机或从机和 从机之间距离较远 ,直接用串行口 RXD 、TXD 或增加 线路驱动器等办法 ,通讯也较难实现 ,而选用单片调 查制解调芯片来实现远距离数据传输 ,不失为一种
这里我们大概介绍实现中断方式的串口操作要 做的步骤 ,并给出相关的解释 。(1) 设置串行口的波 特率 、奇偶校验 、数据位 、停止位 ; (2) 设置串行口
8250 的 MODEM 控制寄存器的第三位为一 ; (3) 设置 中断 控 制 器 (8259) 的 中 断 屏 蔽 寄 存 器 (21H) , 使 8259 收到串行中断信号能发往 CPU ; (4) 使 CUP能相 应中断 ; (5) 设置相应的中断服务函数并全保存好 以前的中断矢量以便程序退出时恢复原来的中断矢 量 ,注意中断服务函数避免调用 C 语言库函数 ; (6) 在数据传输中 ,为了避免外部中断造成通信出错 ,关 闭键盘中断 。
48
自动化技术与应用 200116
上位机和多台下位机的 485 通信
施思寒1 刘庆滨2 戴景民1 范 毅1 (11 哈尔滨工业大学 , 150001 ; 21 黑龙江省科学院自动化研究所 , 150090)
[ 摘要 ] 本文分析了 PC机多机通信的通信原理 ,给出了实际常用的 VB610 和 C语言通信的编程方法 ,并针对实际系统给出了通 信协议和上下位机程序 。 关键词 通信原理 VB610 C 语言 通信协议
Address = 1 DO Comml . Ouput = str (Address) DO Dummy = Do Events () LoopUntilComml . InBufferCount > = 30 InString $ = Comml . Input ……处理数据 ……………… Address = Address + 1 If Address > = 6 then Address = 1 End if Loop Until False End Sub 下位机程序 (与第一台下位机为例) :
1 引言
目前 ,在自动控制领域中 ,经常要实现上位机和 下位机的通信 。有时甚至要求上位机和多台下位机 建立通信 。因此人们常常将工控机和 PC 机结合起来 构成主从式控制系统 。在这过程中 ,上位机主要负责 人机接口管理和系统资源的高层控制 。下位机主要 完成数据采集 、处理 、接收上位机的控制 。命令在这 种系统中 ,上位机一般采用 Windows 操作系统 。由于
信协议 ,通信介质采用双绞线 。在信道访问控制上 , 采用主从式与自由竞争式相结合的放手式通信 ,即 以 PC 主处理机和控制台作为主控节点 ,两主控节点 的优先级与节点标识符相对应 ,主控节点命令及信 息的发送可通过外部设置约定 ,也可通过自由竞争 实现 。数据通信网络分两个层次进行 : ①根据主机 的命令控制内置 CAN 总线的伺服控制器对各分部 的动作进行现场数据采集和本地操作 ,完成程序的 输入 、调试和运行 , 接收上位机速度给定数据的传 送 ,以及向上位机传送有关本地伺服控制器的信息 。 代替主机行使控制功能 ,同时作为下位机接收主机 命令 ,完成对石墨纸生产线机械部分的控制 。②上 位机信息管理ቤተ መጻሕፍቲ ባይዱ信可以对每台伺服控制器运行情况 进行实时监视 ,控制系统各节点运行的过程 ,记录工 作时间和统计运行参数等 。并对结果进行存储 、显示 或打印 。
# include < conio. h > void interrupt NewInt (void) ; void interrupt ( 3 OldInt) (void) = NULL ; void send (char ch) ; char receive (void) ; # define Address 1 char AddCh ; main () {char Data[ 10 ] ; int Flag = 0 ; bioscom(0 ,0x03 | 0x00 | 0x08 | 0xe0 ,0) ; OldInt = getvect (0x0c) ; outportb (0x3f9 ,0x01) ; outportb (0x3fc ,0x0b) ; setvect (0x0c ,NewInt) ; outportb (0x21 ,inp (0x21) | 0x02 &0xE7) ; enable () ; while (1) { if ( Flag) { Flag = false ; Send (Data[ 0 ]) ; ……发送数据 … } ……程序采集数据和处理数据 ……
VB610 功能强大 ,简单易用 ,能在短时间里开发出高 效的通信程序 ,我们采和它开发上位机的通信程序 。 由于下位机实时性和人机接口要求不强的特点 ,我 们用 C 语言开发下位机的通信程序和数据采集程 序。
2 系统实现
在我们研制的这个系统中 ,要求采集数据的点 数多达几十个 ,因此需要多台下位机进行数据采集 。
自动化技术与应用 200116
49
他们实现的工作过程相同 : 一是接受上位机发来的 数据 ;二是采集现场数据将合法数据存储起来 ,在合 适的时间传至上位机 。这系统采用主从结构 ,下位机 之间不能通信 ,上位机可以和每一台下位机通信 ,而 且什么时候通信以及做什么是完全由上位机控制 。 在通信方式选择上 ,我们选择异步串行通信 。这是因 为其灵活性好 ,便于处理实时性强的串行数据 。但串 行接口标准的选择上位机与下位机间的距离通常较 远 ,上位机和下位机本身带有 RS —232C 接口 ,其最 大传输距离为 30m ,不能满足要求 。而 RS —485 串行 数据通信标准可传送 2000m 以上 ,因此宜选用后者 。 故在硬件接口 : (1) 上位机本身具有 RS —232C接口 , 再配备一 块 RS232 —RS485 转 换 板 STD5630 , 实 现 RS —232 电平到 RS —485 电平的转换 。即采用 RS485 串行数据通信标准 ; (2) 下位机串行通信接口 :下位 机 本 身 具 有 RS —232C 接 口 , 再 配 备 一 块 RS485 —RS232 转换板 5P60 ,实现了 RS —485 电平到 RS —232 电平的转换 。这样 , 当波特率为 9600 波特 时 ,可传输 2000m ,若适当降低波特率 , 可传输更远 距离 。
3 VB 的串行通信和 C 语言的串行 通信原理
串行通信是将二进制数据一位一位地通过一根 线路顺序传送 ,在某一时刻只传送一比特数据。利用 VB610 的 MSCOMM 通信控件可以很方便地访问串口 , 而且还考虑到了其他所有细节问题 ,MSCOMM控件同 时支持事件驱动及查询方法 。尽管 MSCOMM 控件有 很多 重 要 属 性, 但 只 需 要 熟 悉 以 下 属 性: (1) CommPort :设置并返回串口序号 ; (2) Settings :一定 符串的形式设置并返回波特率 ,奇偶校验 ,数据位 ,停 止位 ; (3) PortOpen : 设 置 并 返 回 通 信 口 的 状 态 ; (4) Input : 从 接 收 缓 冲 区 读 取 并 删 除 字 符 ; (5) InputLen :设置并返回 Input 属性一次从接收缓冲 区读取的字符数 ; (6) Output :向输出缓冲区写一个字 符串 ; (7) InBufferCount :返回接收缓冲区中等待的字 符数 ; (8) InBufferSize : 设置并返回接收缓冲区的大 小 ,单位是字节 ; (9) InputMode :设置并返回 Input 取回 的 数 据 类 型 。若 数 据 只 用 ANSI 字 符 , 则 用 ComInputModeText ,对其他字符数据 ,如数据中有迁入 的控制字符 NULL 等 ,则使用 ComInputModeBinary。在 我们实际的下位机通信程序中 ,我们使用了 C 语言 , 为了实现高波特率的串行通信 ,我们采用下位机以中 断方式接收呼号信号 ,以查询方式传送数据。
5 结论
CAN 数据通信在石墨纸机传动控制系统中的应 用 ,经过一段时间的运行 ,已得到令人满意的结果 。 这一成功的案例 ,对系统总线 CAN 的推广应用 ,有 良好的示范作用 。
参 考 文 献
[1 ] 杨宪惠 1 现场总线技术及应用 1 北京 :清华大学出版社 ,1999 [2 ] Hans Lenze. Operating Instruction(Fieldbus module type 2171) . Hameln
4 上下位机的通信协议
上位机发呼号信号 ,下位机以中断方式接收呼 号信号 ,以查询方式传送数据 。下位机数据打包 ,数 据格式为 : 起始位 、7 位数据位 、校验位 、结束符 。上 位机接收到数据后 ,有校验为判断数据是否出错 ,如 出错 ,滤去不用 。
5 程序实例
上位机程序 :
:Sub FormlLoad () Global Inbuf As String Comml . Commport = 1 设置 COMl Comml . Setting = ”9600 ,E ,7 ,1”设置波特率为 9600 , 偶校验 ,7 位数 ,1 个停止位 Comml. InputLen = 0 读取接收缓冲区的所有字符 Comml. OurBufferSize = 512 设置发送缓冲区的大小 为 512 字节 Comml. SThreshold = 1 发送缓冲空触发发送事件 Comml . RThreshold = 0 禁止接收 Comml . PortOpen = True 开 COMl End Sub . Sub CmdComm() dim Address as Integer 发机器号