汽车理论matlab
汽车理论课后题matlab程序
n=600:1:4000; r=; i0=; eff=; f=;m=3880; g=; G=m*g; CdA=; a=; hg=; L=;Iw1=; Iw2=; Iw=Iw1+Iw2; If=;Ttq=+*n/*(n/1000).^2+*(n/1000).^*(n/1000).^4;%驱动力行驶阻力平衡图for ig=[,,,,]Ua=*r*n/ig/i0;Ft=Ttq*ig*i0*eff/r;plot(Ua,Ft);hold on;endFf=G*f;ua=0::max(Ua);Fw=CdA*ua.^2/;plot(ua,(Ff+Fw)); title('驱动力-行驶阻力平衡图');xlabel('Ua/(km/h)');ylabel('Ft/N');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw') [x,y]=ginput(1); disp('汽车的最高车速');disp(x);disp('km/h');%最大爬坡度及最大爬坡度时的附着率Ua=*r*n/i0;Ft=Ttq**i0*eff/r;Fw=CdA*Ua.^2/;i=tan(asin((Ft-(Ff+Fw))/G));disp('汽车的最大爬坡度');disp(max(i));C=max(i)/(a/L+hg/L*max(i));disp('克服最大爬坡度时的附着率');disp(C);%加速度倒数曲线figure;for ig=[,,,,]Ua=*r*n/ig/i0;q=1+Iw/(m*r^2)+If*ig^2*i0^2*eff/(m*r^2);Ft=Ttq*ig*i0*eff/r;Fw=CdA*Ua.^2/;as=(Ft-(Ff+Fw))/q/m;plot(Ua,1./as);hold on;endaxis([0 98 0 10]);title('行驶加速度倒数曲线');xlabel('Ua/(km/h)');ylabel('1/a');gtext('1/a1'),gtext('1/a2'),gtext('1/a3'),gtext('1/a4'),gtext('1/a5'); %加速时间曲线u(1)=*r*600/i0/;dt=;w=1;t(1)=0;ig=;while(u(w)<n(w)=u(w)*ig*i0/r;Ttq(w)=+*n(w)/*(n(w)/1000)^2+*(n(w)/1000)^*(n(w)/1000)^4;Ft(w)=Ttq(w)*ig*i0*eff/r;Ff=G*f;Fw(w)=CdA*u(w)^2/;q=1+Iw/(m*r^2)+If*ig^2*i0^2*eff/(m*r^2);a(w)=*(Ft(w)-(Ff+Fw(w)))/q/m;u(w+1)=u(w)+a(w)*dt;if(u(w+1)>=*4000*r/i0)ig=;endif(u(w+1)>=*4000*r/i0) ig=; endif(u(w+1)>=*4000*r/i0) ig=; endt(w+1)=(w+1)*dt; w=w+1; endfigure;plot(t,u);axis([0 60 0 100]);title('2挡原地起步加速时间曲线');xlabel('时间t/s'),ylabel('车速u/(km/h)');[x1,y1]=ginput(1);disp('加速到70km/h 的时间');disp(x1);0204060801001202000400060008000100001200014000驱动力-行驶阻力平衡图Ua/(km/h)F t /N102030405060708090012345678910行驶加速度倒数曲线Ua/(km/h)1/a10203040506001020304050607080901002挡原地起步加速时间曲线时间t/s车速u /(k m /h)Iw1=; Iw2=; Iw=Iw1+Iw2; If=; m=1600; g=;G=m*g; Ttqmax=140; i1=; i0=; eff=; r=; hg=; b=; L=; q=1+Iw/(m*r^2)+If*i1^2*i0^2*eff/(m*r^2); Ft=Ttqmax*i1*i0*eff/r;a=Ft/q/m;q=a/g;C1=q/(b/L-hg/L*q);if(C1>disp('发动机转矩不能充分发挥');elsedisp('发动机转矩能够充分发挥');endb=(q/+hg/L*q)*L;disp('调整后的b值');disp(b);disp('调整后的前轴负荷率'),disp(b/L);Iw=; If=; m=2152; g=; r=; eff=; i4=1; i0=;amax=; Ua=50/; CdA=;q=1+Iw/(m*r^2);f=q*g;disp('汽车在该路面上的滚动阻力系数');disp(f);q=1+Iw/(m*r^2)+If*i4^2*i0^2*eff/(m*r^2);D4max=f+q*amax/g;disp('最大动力因数');disp(D4max);Fw=CdA*Ua^2/;D1max=(D4max*G+Fw)*i1/i4/G;imax=tan(asin((D1max-f*sqrt(1-D1max^2+f^2))/(1+f^2))); disp('最大爬坡度'),disp(imax);n=600:1:4000; r=; i0=; eff=; f=;CdA=;m=3880; g=; G=m*g;Ttq=+*n/*(n/1000).^2+*(n/1000).^*(n/1000).^4;for ig=[,,,,]Ua=*r*n/ig/i0;Pe=Ttq.*n/9550;plot(Ua,Pe);hold on;endUa=0::max(Ua);Pf=G*f*Ua/3600;Pw=CdA*Ua.^3/76140;plot(Ua,(Pf+Pw)/eff);title('汽车的功率平衡图'),xlabel('Ua/(km/h)'),ylabel('P/kw');%等速百公里燃油消耗n1=[815,1207,1614,2012,2603,3006,3403,3804];b0=[,,,,,,,];b1=[,,,,,,,] ;b2=[,,,,,,,];b3=[,,,,,,,];b4=[,,,,,,,];B0=spline(n1,b0,n); B1=spline(n1,b1,n); B2=spline(n1,b2,n); B3=spline(n1,b3,n); B4=spline(n1,b4,n);deng=7;figure;for ig=[,]Ua=*r*n/ig/i0;Pf=G*f*Ua/3600;Pw=CdA*Ua.^3/76140;P=(Pf+Pw)/eff;b=B0+B1.*P+B2.*P.^2+B3.*P.^3+B4.*P.^4; Q=P.*b./*Ua*deng); plot(Ua,Q); hold on; endaxis([0 100 12 28]);title('最高挡与次高挡等速百公里油耗曲线'),xlabel('Ua/(km/h)'),ylabel('百公里油耗Qs/(L/100km)');204060801001200102030405060708090100汽车的功率平衡图Ua/(km/h)P /k w020406080100121416182022242628最高挡与次高挡等速百公里油耗曲线Ua/(km/h)百公里油耗Q s /(L /100k m )beta=; L=; a1=; b1=L-a1; hg1=; a2=; b2=L-a2; hg2=;g=; z=0::1;faif1=beta*z./(1/L*(b1+z*hg1)); fair1=(1-beta)*z./(1/L*(a1-z*hg1)); faif2=beta*z./(1/L*(b2+z*hg2)); fair2=(1-beta)*z./(1/L*(a2-z*hg2));plot(z,faif1,'r',z,fair1,'g',z,faif2,'b',z,fair2,'k'); fai=0::1;Ef1=(b1/L)./(beta-fai*hg1/L); Er1=(a1/L)./((1-beta)+fai*hg1/L); Ef2=(b2/L)./(beta-fai*hg2/L); Er2=(a2/L)./((1-beta)+fai*hg2/L); figure;plot(fai,Ef1,'r',fai,Er1,'g',fai,Ef2,'b',fai,Er2,'k');axis([0 1 0 1]);fai=;Er1=(a1/L)/((1-beta)+fai*hg1/L);Er2=(a2/L)/((1-beta)+fai*hg2/L);abmax1=fai*Er1*g;abmax2=fai*Er2*g;t21=; t22=; u0=30;s1=1/*(t21+t22/2)*u0+u0^2/abmax1;s2=1/*(t21+t22/2)*u0+u0^2/abmax2;disp('空载时的制动距离'),disp(s1);disp('满载时的制动距离'),disp(s2);%前部管路损坏时制动距离z1=a1*fai/(L+fai*hg1); z2=a2*fai/(L+fai*hg2); abmax1=z1*g; abmax2=z2*g;s1=1/*(t21+t22/2)*u0+u0^2/abmax1;s2=1/*(t21+t22/2)*u0+u0^2/abmax2;disp('前部管路损坏时空载制动距离');disp(s1); disp('前部管路损坏时满载制动距离');disp(s2); %后部管路损坏时的制动距离z1=b1*fai/(L-fai*hg1);z2=b2*fai/(L-fai*hg2); abmax1=z1*g; abmax2=z2*g;s1=1/*(t21+t22/2)*u0+u0^2/abmax1;s2=1/*(t21+t22/2)*u0+u0^2/abmax2;disp('后部管路损坏时空载制动距离');disp(s1); disp('后部管路损坏时满载制动距离');disp(s2);hg=; b=; L=; beta=; fai=; g=;fai0=(L*beta-b)/hg;if(fai<fai0)disp('前轮先抱死,制动效率为'); E=(b/L)/(beta-fai*hg/L);elsedisp('后轮先抱死,制动效率为'); E=(a/L)/((1-beta)+fai*hg/L);enddisp('最大制动减速度'),disp(E*fai*g);disp('a)、b)、c)的双回路制动系统制动系增益都为G');disp('1回路失效时,a)、b)、c)的制动系增益分别为,,');disp('1回路失效时,a)、b)、c)的制动系增益分别为,,');disp('a)中1回路失效时最大制动强度');zmax1=a*fai/(L+fai*hg)disp('a)中1回路失效时制动效率');disp(zmax1/fai)disp('a)中1回路失效时最大制动减速度');abmax1=zmax1*gdisp('a)中2回路失效时最大制动强度');zmax2=a*fai/(L+fai*hg)disp('a)中1回路失效时制动效率');disp(zmax1/fai)disp('a)中2回路失效时最大制动减速度');abmax2=zmax2*gdisp('b)或c)中1或2回路失效时最大制动强度');z=fai*b/(2*L*beta-fai*hg)disp('b)或c)中1或2回路失效时最大制动减速度');abmax=z*gdisp('b)或c)中1或2回路失效时制动效率');disp(z/fai)disp('双回路系统a制动系增益最大,一个回路失效时的最大制动减速度也比b、c大,所以其性能较优')disp('b和c制动系增益相同,两者在一个回路失效时的制动效率相同。
汽车理论课后作业答案MATLAB

汽车理论作业MA TLAB过程汽车驱动力与阻力平衡图加速度倒数-速度曲线图0 10 20 30 40 50 60 70 80 90 100u汽车功率平衡图u/(km/h)最高档等速百公里油耗曲线Ua/(km/h)燃油积极性-加速时间曲线源程序:《第一章》m=3880;g=9.8;r=0.367;x=0.85;f=0.013;io=5.83;CdA=2.77;lf=0.218;Iw1=1.798;Iw2=3.598;Iw=lw1+lw2;ig=[6.09 3.09 1.71 1.00]; %变速器传动比L=3.2;a=1.947;hg=0.9;n=600:1:4000;T=-19.313+295.27* n/1000-165.44*(门/1000)人2+40.874*(门/1000)人3-3.8445*( n/IOOO).%;Ft1=T*ig(1)*io*x/r; %计算各档对应转速下的驱动力Ft2=T*ig(2)*io*x/r;Ft3=T*ig(3)*io*x/r;Ft4=T*ig(4)*io*x/r;u1=0.377*r*n/(io*ig(1));u2=0.377*r*n/(io*ig(2));u3=0.377*r*n/(io*ig(3));u4=0.377*r*n/(io*ig(4));u=0:130/3400:130;F仁m*g*f+CdA*u”2/21.15;%计算各档对应转速下的驱动阻力F2=m*g*f+CdA*u2.A2/21.15;F3=m*g*f+CdA*u3.A2/21.15;F4=m*g*f+CdA*u4.A2/21.15;figure(1);plot(u1,Ft1, '-r' ,u2,Ft2, '-m' ,u3,Ft3, '-k' ,u4,Ft4, '-b' ,u1,F1, '-r' ,u2,F2, '-m' ,u3,F3, ' k' ,u4,F4, '-b' , 'LineWidth' ,2) title( ' 汽车驱动力与阻力平衡图' );xlabel( 'u_{a}/km.hA{-1}' )ylabel( 'F/N' )gtext( 'F_{t1}' )gtext( 'F_{t2}' )gtext( 'F_{t3}' )gtext( 'F_{t4}' )gtext( 'F_{f}+F_{w}' )%由汽车驱动力与阻力平衡图知,他们无交点,u4在最大转速时达到最大umax=u4(3401)Ft1max=max(Ft1);imax=(Ft1max-m*g*f)/(m*g)disp( ' 假设是后轮驱动' );C=imax/(a/L+hg*imax/L) % 附着率delta1=1+(Iw1+Iw2)/(m*rA2)+If*ig(1)*rA2*ioA2*x/(m*rA2);delta2=1+(Iw1+Iw2)/(m*rA2)+If*ig(2)*rA2*ioA2*x/(m*rA2);delta3=1+(Iw1+Iw2)/(m*rA2)+If*ig(3)*rA2*ioA2*x/(m*rA2);delta4=1+(Iw1+Iw2)/(m*rA2)+If*ig(4)*rA2*ioA2*x/(m*rA2);a1=(Ft1-F1)/(delta1*m); %加速度a2=(Ft2-F2)/(delta2*m);a3=(Ft3-F3)/(delta3*m);a4=(Ft4-F4)/(delta4*m);h1=1./a1; %加速度倒数h2=1./a2;h3=1./a3;h4=1./a4;figure(2);plot(u1,h1,u2,h2,u3,h3,u4,h4, 'LineWidth',2);title( ' 加速度倒数- 速度曲线图xlabel( 'u' )ylabel( '1/a' )gtext( '1/a1' )gtext( '1/a2' )gtext( '1/a3' )gtext( '1/a4' )%由加速度倒数- 速度曲线图可知u1min=min(u1);u1max=max(u1); u2min=u1max; u2min=min(u2);u2max=max(u2); u3min=u2max;u3max=max(u3); u4min=u3max; u4max=70;x1=[]; x2=[]; x3=[]; x4=[];y=3401; for i=1:3401;if u3(i)<=u3min;x1=[i];end end q1=max(x1); ua3=u3(q1:y); a3=h3(q1:y); for i=1:3401;if u4(i)<=u4min;x2=[i];elseif u4(i)<=u4max;x3=[i];end end q2=max(x2); q3=max(x3); ua4=u4(q2:q3); a4=h4(q2:q3); s1=trapz(h2,u2 ); %二挡运行时间s2=trapz(ua3,a3);s3=trapz(ua4,a4);s=[s1 s2 s3];disp( ' 积分得' ) t=sum(s)*1000/3600 %总时间《第二章》Pe1=Ft1.*u1./3600; %计算各档对应转速下的功率Pe2=Ft2.*u2./3600;Pe3=Ft3.*u3./3600;Pe4=Ft4.*u4./3600;P1=F1.*u1./(3600*x); %计算各档对应的各个车速下的行驶功率P2=F2.*u2./ (3600*x);P3=F3.*u3./ (3600*x);P4=F4.*u4./ (3600*x);figure(3);plot(u1,Pe1, '-r' ,u2,Pe2, '-m' ,u3,Pe3, '-k' ,u4,Pe4, '-b' ,u1,P1, 'k' ,u2,P2, 'k' ,u3,P3, 'k' u4,P4, 'k' ,'linewidth' ,2);gtext( 'Pe1' )gtext( 'Pe2' )gtext( 'Pe3' )gtext( 'Pe4' )xlabel( 'u/(km/h)' );ylabel( 'P/kW' );title( ' 汽车功率平衡图' );n=[815 1207 1614 2012 2603 3006 3403 3804];Ua=[];Ua=0.377*r*n./(io*ig(4))ft=[];ft=m*g*f+(2.77/21.15)*Ua.A2; 算各转速对应的各个车速下的行驶阻力Pe(1)=ft(1).*Ua(1)./(3600*x); %计算各转速对应的各个车速下的行驶阻力功率Pe(2)=ft(2).*Ua(2)./(3600*x);Pe(3)=ft(3).*Ua(3)./(3600*x);Pe(4)=ft(4).*Ua(4)./(3600*x);Pe(5)=ft(5).*Ua(5)./(3600*x);Pe(6)=ft(6).*Ua(6)./(3600*x);Pe(7)=ft(7).*Ua(7)./(3600*x);Pe(8)=ft(8).*Ua(8)./(3600*x)B0=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];B1=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291];B2=[72.739 36.657 14.525 7.0035 4.4763 2.8593 2.9788 0.7113];B3=[-5.8629 -2.0533 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215]; B4=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230 -0.000038568];b1=(B0⑴)+(B1(1)*Pe(1))+(B2(1)*Pe(1f2)+(B3(1)*Pe⑴T)+(B4(1)*Pe⑴人4); b2=(B0(2))+(B1(2)*Pe (2))+(B2(2)*Pe(2)A2)+(B3(2)*Pe(2)A3)+(B4(2)*Pe(2)A4);b3=(B 0(3) )+(B1(3)*Pe(3))+(B2 (3)*Pe(3)A2)+(B3(3)*Pe(3)A3)+(B4(3)*Pe(3)A4);b4=(B0(4))+(B1(4)*Pe(4))+(B2(4)*Pe(4)A2)+(B3(4)*Pe(4)A3)+(B4(4)*Pe(4)A4);b5=(B0(5))+(B1(5)*Pe(5))+(B2(5)*Pe(5)A2)+(B3(5)*Pe(5)A3)+(B4(5)*Pe(5)A4);b6=(B0(6))+(B1(6)*Pe(6))+(B2(6)*Pe(6)A2)+(B3(6)*Pe(6)A3)+(B4(6)*Pe(6)A4);b7=(B0(7))+(B1(7)*Pe(7))+(B2(7)*Pe(7)A2)+(B3(7)*Pe(7)A3)+(B4(7)*Pe(7)A4);b8=(B0(8))+(B1(8)*Pe(8))+(B2(8)*Pe(8)A2)+(B3(8)*Pe(8)A3)+(B4(8)*Pe(8)A4);p=0.7;Qs=[];Qs(1)=(Pe(1)*b1)/(1.02*Ua(1).*p*g);Qs(2)=(Pe(2)*b2)/(1.02*Ua(2).*p*g);Qs(3)=(Pe(3)*b3)/(1.02*Ua(3).*p*g);Qs(4)=(Pe(4)*b4)/(1.02*Ua(4).*p*g);Qs(5)=(Pe(5)*b5)/(1.02*Ua(5).*p*g);Qs(6)=(Pe(6)*b6)/(1.02*Ua(6).*p*g);Qs(7)=(Pe(7)*b7)/(1.02*Ua(7).*p*g);Qs(8)=(Pe(8)*b8)/(1.02*Ua(8).*p*g);M=polyfit(Ua,Qs,2);UA=0.377*r*600/(ig(4)*io):1:0.377*r*4000/(ig 4)*io); %卩表示车速QS=polyval(M,UA); %0表示油耗figure(4);plot(UA,QS, 'linewidth' ,2);title( '最高档等速百公里油耗曲线' );xlabel( 'Ua/(km/h)' );ylabel( 'Qs/L' );《第三章》io=[5.17 5.43 5.83 6.17 6.33];Va=0.377*r*n(7)./(io.*ig(4));Ps=46.9366;disp('假设以最高档,较高转速(n取3401 ),最经济负荷(即90%负荷大约46.9366KW )行驶时油耗' ) qs=[];qs(1)=(Ps*b7)/(1.02*Va(1).*p*g); qs(2)=(Ps*b7)/(1.02*Va(2).*p*g);qs(3)=(Ps*b7)/(1.02*Va(3).*p*g);qs(4)=(Ps*b7)/(1.02*Va(4).*p*g); qs(5)=(Ps*b7)/(1.02*Va(5).*p*g);st=[ 17.5813 16.2121 14.5126 13.3775 12.9185]; %加速时间:(这里以最高档〈四档〉、速度由0加速到94.93Km/h 的时间) 因与题 1.3 第三问求法相同,这里不在累述,可直接有计算机求得:figure(5);plot(qs,st, '+' ,'lineWidth' ,2)hold on plot(qs,st,); gtext( 517') gtext( 543') gtext( 583') gtext( 617') gtext( 633')title('燃油积极性-加速时间曲线’); xlabel('燃油经济性(qs/L)'); ylabel('动力性--原地起步加速时间(st/s)');《第四章》4-31)时:前轮先抱死 0时:后轮先抱死利用MATLAB 作图得到下图:前轴利用附着系数为:L z b zh g后轴利用附着系数为:L 1 zazh g空载时: 03.95 0.38 1.85所以满载时:ohg0.8450.413空载时后轮总是先抱死。
汽车理论MATLAB编程

ad=(deta(2)*M)./(Ft-Fwf(i))
delta(i)=0.1*ad/3.6
elseif ua(i)<=uamax(3)
n=ua(i)*ig(3)*io/r/0.377
ua=0.377*r*n/ig/io
deta=1+(Iw1+Iw2)/(M*r^2)+If*ig.^2*io^2*m/(M*r^2)%汽车旋转质量换算系数
Fw=CdA/21.15*(ua).^2
Ttq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4
ua=0.377*r*n/ig/io
deta=1+(Iw1+Iw2)/(M*r^2)+If*ig.^2*io^2*m/(M*r^2)%汽车旋转质量换算系数
Fw=CdA/21.15*(ua).^2
Fwf=Fw+Ff
Ttq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4
delta(i)=0.1*ad/3.6
elseif ua(i)<=uamax(4)
n=ua(i)*ig(4)*io/r/0.377
Ttq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4
axis([0,80,0,100])
汽车理论matlab(独创版)
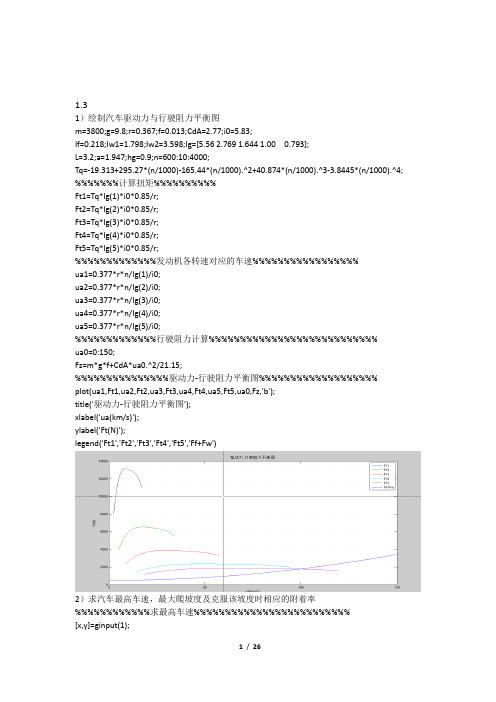
1.31)绘制汽车驱动力与行驶阻力平衡图m=3800;g=9.8;r=0.367;f=0.013;CdA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;Ig=[5.56 2.769 1.644 1.00 0.793];L=3.2;a=1.947;hg=0.9;n=600:10:4000;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4; %%%%%%%计算扭矩%%%%%%%%%%Ft1=Tq*Ig(1)*i0*0.85/r;Ft2=Tq*Ig(2)*i0*0.85/r;Ft3=Tq*Ig(3)*i0*0.85/r;Ft4=Tq*Ig(4)*i0*0.85/r;Ft5=Tq*Ig(5)*i0*0.85/r;%%%%%%%%%%%%%发动机各转速对应的车速%%%%%%%%%%%%%%%%%ua1=0.377*r*n/Ig(1)/i0;ua2=0.377*r*n/Ig(2)/i0;ua3=0.377*r*n/Ig(3)/i0;ua4=0.377*r*n/Ig(4)/i0;ua5=0.377*r*n/Ig(5)/i0;%%%%%%%%%%%%%行驶阻力计算%%%%%%%%%%%%%%%%%%%%%%%%%%%ua0=0:150;Fz=m*g*f+CdA*ua0.^2/21.15;%%%%%%%%%%%%%%%驱动力-行驶阻力平衡图%%%%%%%%%%%%%%%%%%%plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua0,Fz,'b');title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');legend('Ft1','Ft2','Ft3','Ft4','Ft5','Ff+Fw')2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率%%%%%%%%%%%%求最高车速%%%%%%%%%%%%%%%%%%%%%%%%%[x,y]=ginput(1);disp('汽车最高车速=');disp(x);disp('km/h');%%%%%%%%%%%%求汽车的最大爬坡度%%%%%%%%%%%%%%%%Ff=m*g*f;Fw=CdA*ua1.^2/21.15;imax=tan(asin(max(Ft1-Ff-Fw)/m/g));disp('汽车最大爬坡度=');disp(imax);%%%%%%%%%%%%%求汽车的附着率%%%%%%%%%%%%%%%%q=imax;C2=q/(a/L+hg*q/L);disp('假设后轮驱动,最大爬坡度相应的附着率=');disp(C2);C1=q/((L-a)/L-hg*q/L);disp('假设前轮驱动,最大爬坡度相应的附着率=');disp(C1);3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间%%%%%%%%%%%%%%%%%加速时间曲线%%%%%%%%%%%%%%%%%%%%%%%%%data1=1+(Iw1+Iw2)/(m*r^2)+(If*Ig(1)^2*i0^2*0.85)/(m*r^2);data2=1+(Iw1+Iw2)/(m*r^2)+(If*Ig(2)^2*i0^2*0.85)/(m*r^2);data3=1+(Iw1+Iw2)/(m*r^2)+(If*Ig(3)^2*i0^2*0.85)/(m*r^2);data4=1+(Iw1+Iw2)/(m*r^2)+(If*Ig(4)^2*i0^2*0.85)/(m*r^2);data5=1+(Iw1+Iw2)/(m*r^2)+(If*Ig(5)^2*i0^2*0.85)/(m*r^2);Fw1=CdA*ua1.^2/21.15;Fw2=CdA*ua2.^2/21.15;Fw3=CdA*ua3.^2/21.15;Fw4=CdA*ua4.^2/21.15;Fw5=CdA*ua5.^2/21.15;a1=1./((Ft1-Ff-Fw1)/(data1*m));a2=1./((Ft2-Ff-Fw2)/(data2*m));a3=1./((Ft3-Ff-Fw3)/(data3*m));a4=1./((Ft4-Ff-Fw4)/(data4*m));a5=1./((Ft5-Ff-Fw5)/(data5*m));plot(ua1,a1,ua2,a2,ua3,a3,ua4,a4,ua5,a5);axis([0 99 0 10]);title('汽车的加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5');%%%%%%%%%%%%%%%车速时间曲线%%%%%%%%%u1=0.377*r*600./Ig/i0;u2=0.377*r*4000./Ig/i0;data=0*Ig;for i=1:5data(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(Ig(i))^2*i0^2*0.85)/(m*r^2);endua=6:0.01:99;N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=m*g*f;Fw=CdA*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(Ig(2)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;Ft=Tq*Ig(2)*i0*0.85/r;inv_a(i)=(data(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(Ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;Ft=Tq*Ig(3)*i0*0.85/r;inv_a(i)=(data(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(Ig(4)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;Ft=Tq*Ig(4)*i0*0.85/r;inv_a(i)=(data(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(Ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;Ft=Tq*Ig(5)*i0*0.85/r;inv_a(i)=(data(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;enda0=delta(1:k);t(i)=sum(a0);endplot(t,ua);axis([0 80 0 100]);title('汽车2档原地起步换挡加速时间曲线');xlabel('时间t(s)');ylabel('速度ua(km/h)');[x1,y1]=ginput(1);disp('汽车加速时间=');disp(x1);disp('s');2.71)汽车功率平衡图%%%%%%%%%%%%%%%%%功率平衡图%%%%%%%%%%%%%%%%%%%%%%%%%% Pe1=Tq.*Ig(1)*i0.*ua1./(3600*r);Pe2=Tq.*Ig(2)*i0.*ua2./(3600*r);Pe3=Tq.*Ig(3)*i0.*ua3./(3600*r);Pe4=Tq.*Ig(4)*i0.*ua4./(3600*r);Pe5=Tq.*Ig(5)*i0.*ua5./(3600*r);Pe=max(Pe1);Pf=m*g*f*ua0/3600;Pw=CdA*ua0.^3/76140;P=(Pw+Pf)./0.85;plot(ua1,Pe1,ua2,Pe2,ua3,Pe3,ua4,Pe4,ua5,Pe5,ua0,P,ua0,Pe);axis([0 120 0 80]);title('汽车功率平衡图');xlabel('ua(km/h)');ylabel('Pe(kw)');gtext('1'),gtext('2'),gtext('3'),gtext('4'),gtext('5'),gtext('(Pf+Pw)/et'),gtext('Pe');2)最高档与次高档的等速百公里油耗曲线。
汽车理论第四章matlab
第四章1)求利用附着系数曲线的程序:m1=4080;hg1=0.845;L1=3.950;a1=2.100;bt1=0.38;m2=9290;hg2=1.170;L2=3.950;a2=2.950;bt2=0.38;%利用附着系数与制动强度的关系曲线z=0:0.01:0.8;y=z;b1=L1-a1;b2=L2-a2;yf1=bt1*L1.*z./(b1+hg1.*z);yf2=bt2*L2.*z./(b2+hg2.*z);yr1=(1-bt1)*L1.*z./(a1-hg1.*z);yr2=(1-bt2)*L2.*z./(a2-hg2.*z);%ECE法规要求曲线yECE2=(z+0.07)./0.85;z1=0.30:0.01:0.80;yECE1=(z1-0.02)./0.74;z2=0.15:0.01:0.30;yECE3=z2+0.08;yECE4=z2-0.08;plot(z,yf1,'y',z,yf2,'g',z,yr1,'b',z,yr2,'c',z,y,'r--',z,yECE2,'k',z1,yECE1,'k',z2,yECE3,'k',z2,yE CE4,'k')axis([0 0.8 0 0.8]);xlabel('制动强度z/g');ylabel('利用附着系数y');title('利用附着系数与制动强度的关系曲线');gtext('yf1(空车)');gtext('yf2(满载)');gtext('yr1(空车)');gtext('yr2(满载)');gtext('y=z');gtext('ECE法规要求界限')以下是利用附着系数曲线和ECE法规要求曲线界限由利用附着系数曲线和ECE法规要求曲线界限曲线可知该车的制动系统满足法规的要求求制动效率曲线的程序:m1=4080;hg1=0.845;L1=3.950;a1=2.100;bt1=0.38;m2=9290;hg2=1.170;L2=3.950;a2=2.950;bt2=0.38;b1=L1-a1;b2=L2-a2;%求制动效率曲线Y=(0:0.01:1); %Y为地面附着系数Ef1=b1./(bt1*L1-Y*hg1)*100; %空车Ef2=b2./(bt2*L2-Y*hg2)*100; %满载Er1=a1./((1-bt1)*L1+Y*hg1)*100;Er2=a2./((1-bt2)*L2+Y*hg2)*100;plot(Y,Ef1,'y',Y,Ef2,'b',Y,Er1,'k',Y,Er2,'r')axis([0 1.0 0 100]);xlabel('附着系数Y');ylabel('制动效率(%)');title('制动效率曲线')gtext('Ef2(满载)'),gtext('Er1(空车)'),gtext('Ef2(满载)');以下是制动效率曲线:2),3)问的计算程序:m1=4080;hg1=0.845;L1=3.950;a1=2.100;bt1=0.38; m2=9290;hg2=1.170;L2=3.950;a2=2.950;bt2=0.38; b1=L1-a1;b2=L2-a2;%求制动效率曲线Y=(0:0.01:1); %Y为地面附着系数Ef1=b1./(bt1*L1-Y*hg1)*100; %空车Ef2=b2./(bt2*L2-Y*hg2)*100; %满载Er1=a1./((1-bt1)*L1+Y*hg1)*100;Er2=a2./((1-bt2)*L2+Y*hg2)*100;%求制动距离t1=0.02;t2=0.2;ua0=30;Y1=0.8;g=9.8;abmax1=Y1*g*Er1(81)/100;abmax2=Y1*g*Er2(81)/100;disp('空载时汽车不抱死的制动距离')s1=1/3.6*(t1+t2/2)*ua0+ua0^2/(25.92*abmax1) disp('满载时汽车不抱死的制动距离')s2=1/3.6*(t1+t2/2)*ua0+ua0^2/(25.92*abmax2)%当汽车制动系后部管路破损时的制动距离Fxb11=Y1*m1*g*b1/(L1-Y1*hg1); %当后轮的制动力为0,空车时前轮的地面制动力Fxb12=Y1*m2*g*b2/(L2-Y1*hg2); %当后轮的制动力为0,满载时前轮的地面制动力a11=Fxb11/m1;a12=Fxb12/m2;disp('当汽车制动系后部管路破损时空车的制动距离')s11=1/3.6*(t1+t2/2)*ua0+ua0^2/(25.92*a11)disp('当汽车制动系后部管路破损时满载的制动距离')s12=1/3.6*(t1+t2/2)*ua0+ua0^2/(25.92*a12)%当汽车制动系前部管路破损时的制动距离Fxb21=Y1*m1*g*a1/(L1+Y1*hg1); %当前轮的制动力为0,空车时后轮的地面制动力Fxb22=Y1*m2*g*a2/(L1+Y1*hg2); %当前轮的制动力为0,满载时后轮的地面制动力a21=Fxb21/m1;a22=Fxb22/m2;disp('当汽车制动系前部管路破损时空车的制动距离')s21=1/3.6*(t1+t2/2)*ua0+ua0^2/(25.92*a21)disp('当汽车制动系前部管路破损时满载的制动距离')s22=1/3.6*(t1+t2/2)*ua0+ua0^2/(25.92*a22)运行结果为:空载时汽车不抱死的制动距离s1 =7.5906满载时汽车不抱死的制动距离s2 =6.0819当汽车制动系后部管路破损时空车的制动距离s11 =8.8379当汽车制动系后部管路破损时满载的制动距离s12 =14.3486当汽车制动系前部管路破损时空车的制动距离s21 =10.7561当汽车制动系前部管路破损时满载的制动距离s22 =8.3354。
汽车理论 matlab编程 作业答案
4.3(1)利用附着系数空载时前轴的利用附着系数φf1:φf1=βz1L b+zh g=0.38z13.951.85+0.845z空载时后轴的利用附着系数φr1:φr1=(1−β)z1L a−zh g=(1−0.38)z13.952.1−0.845z满载时前轴的利用附着系数φf2:φf2=βz1L b+zh g=0.38z13.951.0+1.17z满载时后轴的利用附着系数φr2:φr2=(1−β)z1L a−zh g=(1−0.38)z13.952.95−1.17zMatlab程序:clcclearsyms z;f1=0.38*z/((1/3.95)*(1.85+0.845*z));r1=(1-0.38)*z/((1/3.95)*(2.1-0.845*z)); f2=0.38*z/((1/3.95)*(1.0+1.17*z));r2=(1-0.38)*z/((1/3.95)*(2.95-1.17*z)); f=z;ezplot(f1);hold on;ezplot(f2);ezplot(r1);ezplot(r2);ezplot(f);axis([0 1.0 0 1.0]);title('利用附着系数曲线');xlabel('制动强度z');ylabel('利用附着系数');text(0.38,0.8,'Ør(空载)');text(0.6,0.9,'Ør(满载)');text(0.8,0.45,'Øf(空载)');text(0.8,0.6,' Øf(满载)');text(0.85,0.9,'Ø=z')制动效率空载时前轴的制动效率E f1:E f1=bLβ−φf gL=1.85/3.95f空载时后轴的制动效率E r1:E r1=aL(1−β)−φr gL=2.1/3.95r满载时前轴的制动效率E f2:E f2=bLβ−φf gL=1.0/3.950.38−φf∙1.17/3.95满载时后轴的制动效率E r2:E r2=aL(1−β)−φr gL=2.95/3.95rMatlab程序:clearsyms x;Er1=2.1/3.95/(1-0.38+x*0.845/3.95); Ef2=1.0/3.95/(0.38-x*1.17/3.95);Er2=2.95/3.95/(1-0.38+x*1.17/3.95); ezplot(Ef2);hold on;ezplot(Er1);ezplot(Er2);axis([0 1.0 0 1.0]);title('前后轴制动效率曲线'); xlabel('附着系数'); ylabel('制动效率(%)'); text(0.35,0.9,'Ef'); text(0.8,0.9,'Er'); text(0.55,0.78,'Er'); text(0.65,0.94,'满载'); text(0.55,0.65,'空载');(2)①由图可得:空载时,在φ=0.8时的制动效率为0.7,则其制动减速度为0.8g*0.7=0.56g 。
汽车理论(余志生)matlab编程实验报告

汽车理论1.汽车驱动力-行驶阻力平衡图的绘制代码:>> n=600:1:4000;>>Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;>> i0=5.83;>> ig1=5.56;>> ig2=2.769;>> ig3=1.644;>> ig4=1;>> ig5=0.793;>> Ft1=Tq*ig1*i0*0.85/0.367;>> Ft2=Tq*ig2*i0*0.85/0.367;>> Ft3=Tq*ig3*i0*0.85/0.367;>> Ft4=Tq*ig4*i0*0.85/0.367;>> Ft5=Tq*ig5*i0*0.85/0.367;>> u1=0.377*n*0.367/(5.83*ig1);>> u2=0.377*n*0.367/(5.83*ig2);>> u3=0.377*n*0.367/(5.83*ig3);>> u4=0.377*n*0.367/(5.83*ig4);>> u5=0.377*n*0.367/(5.83*ig5);>> u=0:1:120;>> Ff=3880*9.8*0.013+2.77*u.^2/21.15;>> plot(u1,Ft1,u2,Ft2,u3,Ft3,u4,Ft4,u5,Ft5,u,Ff);2.最高车速、最大爬坡度及附着率:最高车速时Ft=Ff+Fw,由曲线图可知在5档时有最高车速:U max=(Ft5-3880*9.8*0.013*21.15/2.77)2; n max=4000r/min Umax=99.08km/h最大爬坡度:由曲线图可知最大Ft在一档,则计算一档时最大爬坡度为:i max=tan(arcsin F t−F f−F wG )=tan arcsin(F t1−F fG)由matlab计算得最大爬坡度i max=0.3522.在之前代码基础上输入:>> Ff1=3880*9.8*0.013+2.77*u1.^2/21.15; >> i=tan(asin((Ft1-Ff1)/(3880*9.8)));>> plot(u1,i);>> [m,index]=max(i);最大附着率:Φ=q a L +ℎg L ∗q =(0.35221.9473.2+0.93.2∗0.3522)≈0.498→0.53.加速度倒数曲线与加速时间:在以上代码继续输入matlab 代码:>>Ff2=3880*9.8*0.013+2.77*u2.^2/21.15;>>Ff3=3880*9.8*0.013+2.77*u3.^2/21.15;>>Ff4=3880*9.8*0.013+2.77*u4.^2/21.15;>> Z1=1+((1.798+3.598)+(0.218*5.83.^2*0.85*ig1.^2))/(3880*0.367.^2); %设置旋转质量换算系数>> Z2=1+((1.798+3.598)+(0.218*5.83.^2*0.85*ig2.^2))/(3880*0.367.^2); >> Z3=1+((1.798+3.598)+(0.218*5.83.^2*0.85*ig3.^2))/(3880*0.367.^2); >> Z4=1+((1.798+3.598)+(0.218*5.83.^2*0.85*ig4.^2))/(3880*0.367.^2); >> Z5=1+((1.798+3.598)+(0.218*5.83.^2*0.85*ig5.^2))/(3880*0.367.^2); >> a1=Z1*3880./(Ft1-Ff1); % 设置加速度倒数>> a2=Z2*3880./(Ft2-Ff2);>> a3=Z3*3880./(Ft3-Ff3);>> a4=Z4*3880./(Ft4-Ff4); % 由上题知5档最高车速99km/h ,因此重设转速、扭矩、5档驱动力和阻力>> n=600:1:3308;>> Tqa=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;>> Ft55=Tqa*ig5*i0*0.85/0.367;u55=0.377*n*0.367/(5.83*ig5);>> Ff55=3880*9.8*0.013+2.77*u55.^2/21.15;>> a5=Z5*3880./(Ft55-Ff55);>> plot(u1,a1,u2,a2,u3,a3,u4,a4,u55,a5);axis([0,100,0,14]); % 最高车速时Ft≈Ff,1a<14无限大,因此设置画图范围0<u a<100,0<1a积分法计算最大二档加速到70km/h的时间:t=26.2s脚本代码:Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;ig=[5.56,2.769,1.644,1,0.793];Z=[1.3829,1.1027,1.0429,1.0224,1.0179];nmin=600;nmax=4000;u1=0.377*0.367*nmin./(ig*5.83);u2=0.377*0.367*nmax./(ig*5.83);ua=[6:0.01:99];N=length(ua);Fw=2.77*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*5.83/0.367)/0.377;Ft=Tq*ig(2)*5.83*0.85/0.367;IA(i)=(Z(2)*3880)/(Ft-3880*9.8*0.013-Fw(i));da(i)=0.01*IA(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*5.83/0.367)/0.377;Ft=Tq*ig(3)*5.83*0.85/0.367;IA(i)=(Z(3)*3880)/(Ft-3880*9.8*0.013-Fw(i));da(i)=0.01*IA(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*5.83/0.367)/0.377;Ft=Tq*ig(4)*5.83*0.85/0.367;IA(i)=(Z(4)*3880)/(Ft-3880*9.8*0.013-Fw(i));da(i)=0.01*IA(i)/3.6;elsen=ua(i)*(ig(5)*5.83/0.367)/0.377;Ft=Tq*ig(5)*5.83*0.85/0.367;IA(i)=(Z(5)*3880)/(Ft-3880*9.8*0.013-Fw(i));da(i)=0.01*IA(i)/3.6;enda=da(1:k);t(i)=sum(a);endplot(t,ua);速度-时间图像如下:取平均值得t=26.2s。
汽车理论课后习题matlab程序文件
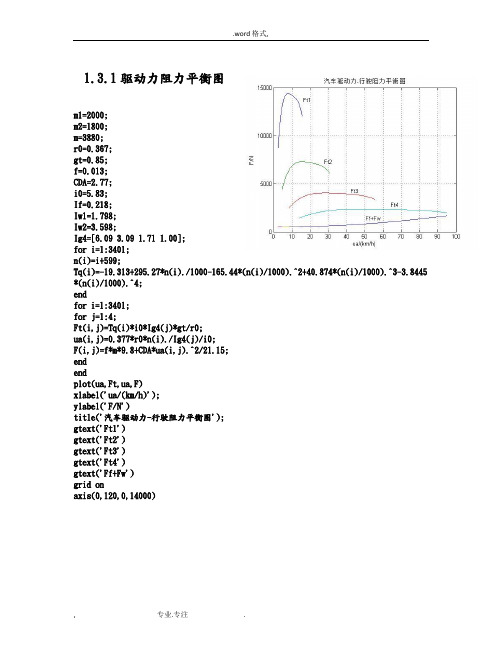
1.3.1驱动力阻力平衡图m1=2000;m2=1800;m=3880;r0=0.367;gt=0.85;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;Ig4=[6.09 3.09 1.71 1.00];for i=1:3401;n(i)=i+599;Tq(i)=-19.313+295.27*n(i)./1000-165.44*(n(i)/1000).^2+40.874*(n(i)/1000).^3-3.8445 *(n(i)/1000).^4;endfor i=1:3401;for j=1:4;Ft(i,j)=Tq(i)*i0*Ig4(j)*gt/r0;ua(i,j)=0.377*r0*n(i)./Ig4(j)/i0;F(i,j)=f*m*9.8+CDA*ua(i,j).^2/21.15;endendplot(ua,Ft,ua,F)xlabel('ua/(km/h)');ylabel('F/N')title('汽车驱动力-行驶阻力平衡图');gtext('Ft1')gtext('Ft2')gtext('Ft3')gtext('Ft4')gtext('Ff+Fw')grid onaxis(0,120,0,14000)1.3.3加速度倒数曲线m1=2000;m2=1800;m=3880;r0=0.367;gt=0.85;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;Ig4=[6.09 3.09 1.71 1.00];q=1.128;for i=1:3401;n(i)=i+599;Tq(i)=-19.313+295.27*n(i)./1000-165.44*(n(i)/1000).^2+40.874*(n(i)/1000).^3-3.8445 *(n(i)/1000).^4;endfor i=1:3401;for j=1:4;Ft(i,j)=Tq(i)*i0*Ig4(j)*gt/r0;ua(i,j)=0.377*r0*n(i)./Ig4(j)/i0;F(i,j)=f*m*9.8+CDA*ua(i,j).^2/21.15;b(i,j)=q*m/(Ft(i,j)-0.131*ua(i,j)^2-9.8*m*f);%加速度倒数%endendplot(ua,b);xlabel('ua/(km/h)');ylabel('1/a/(s^2/m)');title('加速度倒数曲线')gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');grid on;axis([0,50,0,5])2.7功率平衡曲线m1=2000;m2=1800;m=3880;r0=0.367;gt=0.85;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;Ig4=[6.09 3.09 1.71 1.00];for i=1:3401;n(i)=i+599;Tq(i)=-19.313+295.27*n(i)/1000-165.44*(n(i)/1000)^2+40.874*(n(i)/1000)^3-3.8445*(n (i)/1000)^4;endfor i=1:3401;for j=1:4;Ft(i,j)=Tq(i)*i0*Ig4(j)*gt/r0;ua(i,j)=0.377*r0*n(i)./(Ig4(j)*i0);Pe(i,j)=Ft(i,j)*ua(i,j)/3600;%Pe EXPRESSION%c(i,j)=7.647*ua(i,j)/1000+3.638*ua(i,j)^3/100000;%(Pf+Pw)/gt EXPRESSION%end;end;plot(ua,Pe,ua,c);xlabel('ua/(km/h)');ylabel('Pe/kW');title('功率平衡图');gtext('Pe1');gtext('Pe2');gtext('Pe3');gtext('Pe4');gtext('P阻力');grid on;axis([0,90,0,20]);最高档等速百公里油耗曲线i0=5.83;r=0.367;t=0.85;m=3880;G=38024;f=0.013;CdA=2.77;pg=7.12;ig3=1.71;ig4=1;n=[815 1207 1614 2012 2603 3006 3403 3804];B0=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];B1=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291] ;B2=[72.379 36.657 14.524 7.0035 4.4763 2.8593 2.9788 0.71113];B3=[-5.8629 -2.0553 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215];B4=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230 -0.000038568];ua=(0.377*r*n)/(ig4*i0);Tq=-19.313+295.27*n/1000-165.44*((n/1000).^2)+40.874*((n/1000).^3)-3.8445*((n/1000 ).^4);P=(1/t)*(G*f*ua/3600+CdA*ua.^3/76140);b=B0+B1.*P+B2.*P.^2+B3.*P.^3+B4.*P.^4;Qs=P.*b./(1.02*ua*pg);b=polyfit(ua,Qs,3);ua4=8:1:100;f=polyval(b,ua4);figure;plot(ua,Qs,'ko',ua4,f,'LineWidth',2);title('汽车最高档等速百公里油耗曲线');xlabel('ua/(km/h)');ylabel('Qs/[1/L(100km)]');次高档等速百公里油耗曲线i0=5.83;r=0.367;t=0.85;m=3880;G=38024;f=0.013;CdA=2.77;pg=7.12;ig3=1.71;ig4=1;n=[815 1207 1614 2012 2603 3006 3403 3804];B0=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];B1=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291] ;B2=[72.379 36.657 14.524 7.0035 4.4763 2.8593 2.9788 0.71113];B3=[-5.8629 -2.0553 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215];B4=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230 -0.000038568];ua=(0.377*r*n)/(ig3*i0);Tq=-19.313+295.27*n/1000-165.44*((n/1000).^2)+40.874*((n/1000).^3)-3.8445*((n/1000 ).^4);P=(1/t)*(G*f*ua/3600+CdA*ua.^3/76140);b=B0+B1.*P+B2.*P.^2+B3.*P.^3+B4.*P.^4;Qs=P.*b./(1.02*ua*pg);b=polyfit(ua,Qs,3);ua4=8:1:55;f=polyval(b,ua4);figure;plot(ua,Qs,'ko',ua4,f,'LineWidth',2);title('汽车次高档等速百公里油耗曲线'); xlabel('ua/(km/h)');ylabel('Qs/[1/L(100km)]');。
汽车理论习题Matlab程序
1、3确定一轻型货车得动力性能(货车可装用4挡或5挡变速器,任选其中得一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应得附着率.3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h得车速—时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h得加速时间。
轻型货车得有关数据:汽油发动机使用外特性得Tq-n曲线得拟合公式为式中,Tq为发动机转矩(N•m);n为发动机转速(r/min)。
发动机得最低转速n min=600r/min,最高转速n max=4000r/min。
装载质量2000kg整车整备质量1800kg总质量3880kg车轮半径0、367m传动系机械效率ηt=0、85滚动阻力系数f=0、013空气阻力系数×迎风面积C DA=2、77m2主减速器传动比i0=5、83飞轮转动惯量If=0、218kg•m2二前轮转动惯量Iw1=1、798kg•m2四后轮转动惯量I w2=3、598kg•m 2变速器传动比ig(数据如下表)轴距L=3、2m质心至前轴距离(满载)a=1、974m质心高(满载)hg=0、9m解:Matlab程序:(1) 求汽车驱动力与行驶阻力平衡图与汽车最高车速程序:n=[600:10:4000];Tq=-19、313+295、27*(n/1000)-165、44*(n/1000)、^2+40、874*(n/1000)、^3-3、8445*(n/1000)、^4;m=3880;g=9、8;nmin=600;nmax=4000;G=m*g;ig=[5、56 2、769 1、644 1、00 0、793];nT=0、85;r=0、367;f=0、013;CDA=2、77;i0=5、83;L=3、2;a=1、947;hg=0、9;If=0、218;Iw1=1、798;Iw2=3、598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0、377*r*n/ig(1)/i0;ua2=0、377*r*n/ig(2)/i0;ua3=0、377*r*n/ig(3)/i0;ua4=0、377*r*n/ig(4)/i0;ua5=0、377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua、^2/21、15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext(’Ft2'),gtext(’Ft3'),gtext('Ft4'),gtext('Ft5'),gtext(’Ff+Fw’);zoomon;[x,y]=ginput(1);zoom off;disp('汽车最高车速=’);disp(x);disp(’km/h’);汽车最高车速=99、3006km/h(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=—19、313+295、27*(n/1000)—165、44*(n/1000)、^2+40、874*(n/1000)、^3-3、8445*(n/1000)、^4;m=3880;g=9、8;nmin=600;nmax=4000;G=m*g;ig=[5、562、7691、6441、00 0、793];nT=0、85;r=0、367;f=0、013;CDA=2、77;i0=5、83;L=3、2;a=1、947;hg=0、9;If=0、218;Iw1=1、798;Iw2=3、598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0、377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1、^2/21、15;Fz1=Ff+Fw1;Fi1=Ft1—Fz1;Zoomon;imax=100*tan(asin(max(Fi1/G)));disp('汽车最大爬坡度=’);disp(imax);disp(’%’);汽车最大爬坡度=35、2197%(3)求最大爬坡度相应得附着率与求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19、313+295、27*(n/1000)-165、44*(n/1000)、^2+40、874*(n/1000)、^3-3、8445*(n/1000)、^4;m=3880;g=9、8;nmin=600;nmax=4000;G=m*g;ig=[5、56 2、7691、644 1、00 0、793];nT=0、85;r=0、367;f=0、013;CDA=2、77;i0=5、83;L=3、2;a=1、947;hg=0、9;If=0、218;Iw1=1、798;Iw2=3、598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0、377*r*n/ig(1)/i0;ua2=0、377*r*n/ig(2)/i0;ua3=0、377*r*n/ig(3)/i0;ua4=0、377*r*n/ig(4)/i0;ua5=0、377*r*n/ig(5)/i0;Fw1=CDA*ua1、^2/21、15;Fw2=CDA*ua2、^2/21、15;Fw3=CDA*ua3、^2/21、15;Fw4=CDA*ua4、^2/21、15;Fw5=CDA*ua5、^2/21、15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2); deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2);deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2); deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2);deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2);a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1、/a1;a2=(Ft2-Ff—Fw2)/(deta2*m);ad2=1、/a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1、/a3;a4=(Ft4-Ff—Fw4)/(deta4*m);ad4=1、/a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1、/a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([099 010]);title('汽车得加速度倒数曲线');xlabel('ua(km/h)’);ylabel('1/a');gtext('1/a1');gtext('1/a2’);gtext(’1/a3');gtext('1/a4');gtext('1/a5');a=max(a1);af=asin(max(Ft1—Ff—Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp(’假设后轮驱动,最大爬坡度相应得附着率=');disp(C);假设后轮驱动,最大爬坡度相应得附着率=0、4219(4) >>clearnT=0、85;r=0、367;f=0、013;CDA=2、77;i0=5、83;If=0、218;Iw1=1、798;Iw2=3、598;L=3、2;a=1、947;hg=0、9;m=3880;g=9、8;G=m*g;ig=[5、56 2、7691、644 1、00 0、793];nmin=600;nmax=4000;u1=0、377*r*nmin、/ig/i0;u2=0、377*r*nmax、/ig/i0;deta=0*ig;fori=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);endua=[6:0、01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;d elta=0*ua;Ff=G*f;Fw=CDA*ua、^2/21、15;for i=1:Nk=i;ifua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0、377;Tq=-19、313+295、27*(n/1000)-165、44*(n/1000)^2+40、874*(n/1000)^3—3、8445*(n/1000)^4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff—Fw(i));delta(i)=0、01*inv_a(i)/3、6;elseifua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0、377;Tq=—19、313+295、27*(n/1000)—165、44*(n/1000)^2+40、874*(n/1000)^3-3、8445*(n/1000)^4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft—Ff-Fw(i));delta(i)=0、01*inv_a(i)/3、6;elseif ua(i)〈=u2(4)n=ua(i)*(ig(4)*i0/r)/0、377;Tq=—19、313+295、27*(n/1000)—165、44*(n/1000)^2+40、874*(n/1000)^3-3、8445*(n/1000)^4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0、01*inv_a(i)/3、6;elsen=ua(i)*(ig(5)*i0/r)/0、377;Tq=-19、313+295、27*(n/1000)-165、44*(n/1000)^2+40、874*(n/1000)^3-3、8445*(n/1000)^4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff—Fw(i));delta(i)=0、01*inv_a(i)/3、6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([080 0100]);title('汽车2档原地起步换挡加速时间曲线’);xlabel(’时间t(s)’);ylabel(’速度ua(km/h)');>〉ginputans =25、8223 70、073725、746770、0737所以汽车2档原地起步换挡加速行驶至70km/h得加速时间约为25、8s2、7已知货车装用汽油发动机得负荷特性与万有特性。
汽车理论图形MATLAB程序

汽车理论图形MATLAB程序功率平衡图m=1230;g=9.8;ig=[3.615 2.053 1.393 1.031 0.837]; i0=3.75;r=0.31;yt=0.9;f=0.017;CD=0.31;A=2.2;np=6000;Pemax=83;%绘制汽车驱动力与行驶阻力平衡图for i=1:56;n=500:100:6000;Pe(i)=Pemax*(n(i)/np+(n(i)/np)^2-(n(i)/np)^3); Tq(i)=9549*Pe(i)/n(i);endfor j=1:5for i=1:56Ft(i,j)=Tq(i)*ig(j)*i0*yt/r;ua(i,j)=0.377*r*n(i)/(ig(j)*i0);Fz(i,j)=m*g*f+CD*A*(ua(i,j)^2)/21.15;endendfigureplot(ua,Ft,ua,Fz);title('汽车驱动力与行驶阻力平衡图');xlabel('ua(km/h)');ylabel('Ft(N)');text(20,6700,'Ft1');text(40,4000,'Ft2');text(50,2800,'Ft3');text(80,2000,'Ft4');text(100,1600, 'Ft5');text(100,800,'Ff+Fw');for k=1:56;n=500:100:6000;Pe(k)=Pemax*(n(k)/np+(n(k)/np)^2-(n(k)/np)^3); Tq(k)=9549*Pe(k)/n(k);Ft(k)=T q(k)*ig(4)*i0*yt/r;ua(k)=0.377*r*n(k)/(ig(4)*i0);Fz(k)=m*g*f+CD*A*(ua(k)^2)/21.15;E(k)=abs((Ft(k)-Fz(k)));end[Emin,kmin]=min(E);Umax=ua(kmin)加速度曲线图m=1230;g=9.8;ig=[3.615 2.053 1.393 1.031 0.837]; i0=3.75;r=0.31;yt=0.9;f=0.017;CD=0.31;A=2.2;np=6000;Pemax=83;deta=[1.33 1.12 1.07 1.05 1.04];for i=1:56;n=500:100:6000;Pe(i)=Pemax*(n(i)/np+(n(i)/np)^2-(n(i)/np)^3); Tq(i)=9549*Pe(i)/n(i);endfor j=1:5for i=1:56Ft(i,j)=Tq(i)*ig(j)*i0*yt/r;ua(i,j)=0.377*r*n(i)/(ig(j)*i0);Fz(i,j)=m*g*f+CD*A*(ua(i,j)^2)/21.15;a(i,j)=(Ft(i,j)-Fz(i,j))/(deta(j)*m);b(i,j)= 1./a(i,j);endendx1=ua(:,1);y1=b(:,1);x2=ua(:,2);y2=b(:,2);x3=ua(:,3);y3=b(:,3);x4=ua(:,4);y4=b(:,4);x5=ua(:,5);y5=b(:,5);figureplot(x1,y1,x2,y2,x3,y3,x4,y4,x5,y5);axis([0 185 0 15]);title('汽车行驶加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');汽车二挡原地起步加速时间nT=0.9;r=0.31;f=0.0177;CD=0.31;A=2.2;;i0=3.75;m=3880;g=9.8;Pemax=83;np=6000;G=m*g; ig=[3.615 2.053 1.393 1.031 0.837];nmin=600;nmax=6000;u1=0.377*r*nmin./ig/i0;u2=0.377*r*nmax./ig/i0;deta=[1.33 1.12 1.07 1.05 1.04];ua=[1:0.01:180];N=length(ua);n=0;T q=0;Ft=0;inv_a=0*ua;del ta=0*ua; Ff=G*f;Fw=CD*A*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0.377;Tq=9549*(Pemax*(n/np+(n/np)^2-(n/np)^3))/n;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=9549*(Pemax*(n/np+(n/np)^2-(n/np)^3))/n;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=9549*(Pemax*(n/np+(n/np)^2-(n/np)^3))/n;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=9549*(Pemax*(n/np+(n/np)^2-(n/np)^3))/n;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 0 100]);title('汽车2档原地起步换挡加速时间曲线'); xlabel('时间t(s)'); ylabel('速度ua(km/h)');功率平衡图m=1230;g=9.8;ig=[3.615 2.053 1.393 1.031 0.837]; i0=3.75;r=0.31;yt=0.9;f=0.017;CD=0.31;A=2.2;np=6000;Pemax=83;deta=[1.33 1.12 1.07 1.05 1.04];for j=1:5for i=1:56;n=500:100:6000;Pe(i)=Pemax*(n(i)/np+(n(i)/np)^2-(n(i)/np)^3);Tq(i)=9549*Pe(i)/n(i);ua(i,j)=0.377*r*n(i)/(ig(j)*i0);Pz(i,j)=(m*g*f*ua(i,j)/3600+CD*A*ua(i,j)^3/76140)/yt; endendplot(ua,Pe,ua,Pz);title('功率平衡图');xlabel('ua(km/h)');ylabel('P(kW)');text(40,90,'一档Pe');text(80,90,'二档Pe');text(110,90,'三档Pe');text(150,90,'四档Pe');text(200,90,'五档Pe');text(100,25,'Pz');%绘制最高档和次高档的等速百公里油耗曲线n0=[815,1207,1614,2012,2603,3006,3403,3804];for j=1:5for i=1:8Pd(i)=Pemax*(n0(i)/np+(n0(i)/np)^2-(n0(i)/np)^3); Td(i)=9549*Pd(i)/n0(i);u(i,j)=0.377*r*n0(i)/(ig(j)*i0);endendb(1)=1326.8-416.46*Pd(1)+72.379*Pd(1)^2-5.8629*Pd(1)^3+0.17768*Pd(1)^4;b(2)=1354.7-303.98*Pd(2)+36.657*Pd(2)^2-2.0553*Pd(2)^3+0.043072*Pd(2)^4;b(3)=1284.4-189.75*Pd(3)+14.524*Pd(3)^2-0.51184*Pd(3)^3+0.0068164*Pd(3)^4;b(4)=1122.9-121.59*Pd(4)+7.0035*Pd(4)^2-0.18517*Pd(4)^3+0.0018555*Pd(4)^4;b(5)=1141.0-98.893*Pd(5)+4.4763*Pd(5)^2-0.091077*Pd(5)^3+0.00068906*Pd(5)^4;b(6)=1051.2-73.714*Pd(6)+2.8593*Pd(6)^2-0.05138*Pd(6)^3+0.00035032*Pd(6)^4;b(7)=1233.9-84.478*Pd(7)+2.9788*Pd(7)^2-0.047449*Pd(7)^3+0.00028230*Pd(7)^4;b(8)=1129.7-45.291*Pd(8)+0.71113*Pd(8)^2+0.00075215*Pd(8)^3-0.000038568*Pd(8)^4; u1=u(:,1)';u2=u(:,2)';u3=u(:,3)';u4=u(:,4)';u5=u(:,5)';B1=polyfit(u1,b,3);B2=polyfit(u2,b,3);B3=polyfit(u3,b,3);B4=polyfit(u4,b,3);B5=polyfit(u5,b,3);for k=1:56bh(k,1)=polyval(B1,ua(k,1));bh(k,2)=polyval(B2,ua(k,2));bh(k,3)=polyval(B3,ua(k,3));bh(k,4)=polyval(B4,ua(k,4));bh(k,5)=polyval(B5,ua(k,5));endfor i=1:5for k=1:56Q(k,i)=Pz(k,i)*bh(k,i)/(1.02*ua(k,i)*7.10);endendplot(ua(:,4),Q(:,4),ua(:,5),Q(:,5));axis([0 185 0 20]);title('最高档(五档)和次高档(四档)等速百公里油耗图'); xlabel('ua(km/h)');ylabel('Qs(L/100km)');text(90,10,'四档');text(125,10,'五档');爬坡度图m=1230;g=9.8;G=m*g;ig=[3.615 2.053 1.393 1.031 0.837]; i0=3.75;r=0.31;yt=0.9;f=0.017;CD=0.31;A=2.2;np=6000;Pemax=83;for i=1:56;n=500:100:6000;Pe(i)=Pemax*(n(i)/np+(n(i)/np)^2-(n(i)/np)^3);Tq(i)=9549*Pe(i)/n(i);endfor j=1:5for i=1:56Ft(i,j)=Tq(i)*ig(j)*i0*yt/r;ua(i,j)=0.377*r*n(i)/(ig(j)*i0);Fz(i,j)=m*g*f+CD*A*(ua(i,j)^2)/21.15;F=Ft-Fz;I=tan(asin(Ft/G))*100;endendplot(ua,I);hold on;title('汽车的爬坡度图');xlabel('ua(km/h)');ylabel('i(%)');text(50,55,'一档');text(50,35,'二档');text(100,22,'三档');text(150,15,'四档');text(200,13,'五档');动力因数图m=1230;g=9.8;G=m*g;ig=[3.615 2.053 1.393 1.031 0.837]; i0=3.75;r=0.31;yt=0.9;f=0.017;CD=0.31;A=2.2;np=6000;Pemax=83;%绘制汽车驱动力与行驶阻力平衡图for i=1:56;n=500:100:6000;Pe(i)=Pemax*(n(i)/np+(n(i)/np)^2-(n(i)/np)^3); Tq(i)=9549*Pe(i)/n(i);endfor j=1:5for i=1:56Ft(i,j)=Tq(i)*ig(j)*i0*yt/r;ua(i,j)=0.377*r*n(i)/(ig(j)*i0); Fw(i,j)=CD*A*(ua(i,j)^2)/21.15; F=Ft-Fw;D=F/G;endendplot(ua,D);hold on;axis([0 190 0 0.6]);title('汽车的动力特性图'); xlabel('ua(km/h)');ylabel('动力因数)');text(40,0.5,'一档');text(60,0.3,'二档');text(100,0.2,'三档');text(140,0.1,'四档');text(140,0.04,'五档');。
汽车理论1.3和2.7matlab编程答案
孙野 200812681.3(1)绘制汽车驱动力与行驶阻力平衡图 选用5挡变速器进行整车性能计算发动机转速与汽车行驶速度之间的关系:0377.0i i rn u g a = 发动机使用外特性的T q -n 曲线拟合公式:432)1000(8445.3)1000(874.40)1000(44.165)1000(27.295313.19n n n n T q -+-+-=汽车驱动力:ri i T F Tg q t η0=行驶阻力:2215.2115.21a D a D j w i f u A C mgf dt du m u A C Gi Gf F F F F +=+++=+++δ用matlab 编写程序如下: m1=2000; m2=1800; mz=3880; g=9.81; r=0.367; CdA=2.77; f=0.013; nT=0.85; ig=[5.56 2.769 1.644 1.00 0.793];i0=5.83; If=0.218; Iw1=1.798; Iw2=3.598; %输入已知参数 Iw=2*Iw1+4*Iw2; fori=1:69n(i)=(i+11)*50;Ttq(i)=-19.313+295.27*(n(i)/1000)-165.44*(n(i)/1000)^2+40.874*(n(i)/1000)^3-3.8445*(n(i)/1000)^4; end %从600~4000rpm 油拟合公式计算发动机转距 for j=1:5 fori=1:69Ft(i,j)=Ttq(i)*ig(j)*i0*nT/r; ua(i,j)=0.377*r*n(i)/(ig(j)*i0);Fz(i,j)=CdA*ua(i,j)^2/21.15+mz*g*f;endend%计算各档位下的驱动力和行驶阻力plot(ua,Ft,ua,Fz)title('汽车驱动力与行驶阻力平衡图'); xlabel('ua(km/h)');ylabel('Ft(N)');%作汽车驱动力与行驶阻力平衡图得到汽车驱动力与行驶阻力平衡图如下:(2)①计算汽车最高车速Matlab程序如下:for k=1:175 n1(k)=3300+k*0.1;Ttq(k)=-19.313+295.27*(n1(k)/1000)-165.44*(n1(k)/1000)^2+40.874*(n1(k)/1000)^33.8445*(n1(k)/1000)^4;Ft(k)=Ttq(k)*ig(5)*i0*nT/r;ua(k)=0.377*r*n1(k)/(ig(5)*i0);Fz(k)=CdA*ua(k)^2/21.15+mz*g*f;E(k)=abs((Ft(k)-Fz(k)));end%从3300rpm开始以0.1rpm为步长搜索直到找到for k=1:175 %驱动力与行驶阻力之差绝对值最小点(Ⅴ档处) if(E(k)==min(E))%通过其他检验程序可估计出该点大致位置(3310rpm附近) disp('汽车最高车速='); disp(ua(k));disp('km/h');end%输出结果end汽车最高车速=98.7627km/h计算得汽车最高车速为98.7627km/h。
汽车理论课后习题MATLAB编程
汽车理论课后习题MATLAB编程汽车理论MATLAB编程(第1-4章)第⼀章m=3880;g=9.8;r=0.367;x=0.85;f=0.013;io=5.83;CdA=2.77;If=0.218;Iw1=1.798;Iw2=3.598;Iw=Iw1+Iw2;ig=[6.09 3.09 1.71 1.00]; %变速器传动⽐L=3.2;a=1.947;hg=0.9;n=600:1:4000;T=-19.313+295.27*n/1000-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4; Ft1=T*ig(1)*io*x/r;%计算各档对应转速下的驱动⼒Ft2=T*ig(2)*io*x/r;Ft3=T*ig(3)*io*x/r;Ft4=T*ig(4)*io*x/r;u1=0.377*r*n/(io*ig(1));u2=0.377*r*n/(io*ig(2));u3=0.377*r*n/(io*ig(3));u4=0.377*r*n/(io*ig(4));u=0:130/3400:130;F1=m*g*f+CdA*u1.^2/21.15;%计算各档对应转速下的驱动阻⼒F2=m*g*f+CdA*u2.^2/21.15;F3=m*g*f+CdA*u3.^2/21.15;plot(u1,Ft1,'-r',u2,Ft2,'-m',u3,Ft3,'-k',u4,Ft4,'-b',u1,F1,'-r',u2,F2,'-m',u3,F3,'-k',u4,F4,'-b','LineWidth',2) title('汽车驱动⼒与阻⼒平衡图');xlabel('u_{a}/km.h^{-1}')ylabel('F/N')gtext('F_{t1}')gtext('F_{t2}')gtext('F_{t3}')gtext('F_{t4}')gtext('F_{f}+F_{w}')%由汽车驱动⼒与阻⼒平衡图知,他们⽆交点,u4在最⼤转速时达到最⼤umax=u4(3401)Ft1max=max(Ft1);imax=(Ft1max-m*g*f)/(m*g)disp('假设是后轮驱动');C=imax/(a/L+hg*imax/L) % 附着率delta1=1+(Iw1+Iw2)/(m*r^2)+If*ig(1)*r^2*io^2*x/(m*r^2);delta2=1+(Iw1+Iw2)/(m*r^2)+If*ig(2)*r^2*io^2*x/(m*r^2);delta3=1+(Iw1+Iw2)/(m*r^2)+If*ig(3)*r^2*io^2*x/(m*r^2);delta4=1+(Iw1+Iw2)/(m*r^2)+If*ig(4)*r^2*io^2*x/(m*r^2);a1=(Ft1-F1)/(delta1*m); %加速度a2=(Ft2-F2)/(delta2*m);a3=(Ft3-F3)/(delta3*m);a4=(Ft4-F4)/(delta4*m);h1=1./a1; %加速度倒数h2=1./a2;h3=1./a3;h4=1./a4;figure(2);plot(u1,h1,u2,h2,u3,h3,u4,h4,'LineWidth',2);title('加速度倒数-速度曲线图');xlabel('u')ylabel('1/a')gtext('1/a1')gtext('1/a2')%由加速度倒数-速度曲线图可知u1min=min(u1);u1max=max(u1);u2min=u1max;u2min=min(u2);u2max=max(u2);u3min=u2max;u3max=max(u3);u4min=u3max;u4max=70;x1=[];x2=[];x3=[];x4=[];y=3401;for i=1:3401;if u3(i)<=u3min;x1=[i];endendq1=max(x1);ua3=u3(q1:y);a3=h3(q1:y);for i=1:3401;if u4(i)<=u4min;x2=[i];elseif u4(i)<=u4max;x3=[i];endendq2=max(x2);q3=max(x3);ua4=u4(q2:q3);s3=trapz(ua4,a4);s=[s1 s2 s3];disp('积分得')t=sum(s)*1000/3600 %总时间0102030405060708090100 50001000015000汽车驱动⼒与阻⼒平衡图u a /km.h -1F /N10203040506070809010002468101214加速度倒数-速度曲线图u1/a010203040 5060708090100102030405060汽车功率平衡图10203040506070809010012141618202224最⾼档等速百公⾥油耗曲线Ua/(km/h)Q s /L2324252627282912131415161718燃油积极性-加速时间曲线燃油经济性(qs/L)动⼒性--原地起步加速时间 (s t /s )第⼆章Pe1=Ft1.*u1./3600;%计算各档对应转速下的功率 Pe2=Ft2.*u2./3600; Pe3=Ft3.*u3./3600; Pe4=Ft4.*u4./3600;P1=F1.*u1./(3600*x);%计算各档对应的各个车速下的⾏驶功率 P2=F2.*u2./ (3600*x); P3=F3.*u3./ (3600*x); P4=F4.*u4./ (3600*x); figure(3);plot(u1,Pe1,'-r',u2,Pe2,'-m',u3,Pe3,'-k',u4,Pe4,'-b',u1,P1,'k',u2,P2,'k',u3,P3,'k',u4,P4,'k','linewidth',2); gtext('Pe1') gtext('Pe2') gtext('Pe3') gtext('Pe4') xlabel('u/(km/h)'); ylabel('P/kW'); title('汽车功率平衡图');Ua=0.377*r*n./(io*ig(4))ft=[];ft=m*g*f+(2.77/21.15)*Ua.^2;%计算各转速对应的各个车速下的⾏驶阻⼒Pe(1)=ft(1).*Ua(1)./(3600*x);%计算各转速对应的各个车速下的⾏驶阻⼒功率Pe(2)=ft(2).*Ua(2)./(3600*x);Pe(3)=ft(3).*Ua(3)./(3600*x);Pe(4)=ft(4).*Ua(4)./(3600*x);Pe(5)=ft(5).*Ua(5)./(3600*x);Pe(6)=ft(6).*Ua(6)./(3600*x);Pe(7)=ft(7).*Ua(7)./(3600*x);Pe(8)=ft(8).*Ua(8)./(3600*x)B0=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];B1=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291];B2=[72.739 36.657 14.525 7.0035 4.4763 2.8593 2.9788 0.7113];B3=[-5.8629 -2.0533 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215]; B4=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230-0.000038568];b1=(B0(1))+(B1(1)*Pe(1))+(B2(1)*Pe(1)^2)+(B3(1)*Pe(1)^3)+(B4(1)*Pe(1)^4);b2=(B0(2))+(B1(2)*Pe(2))+(B2(2)*Pe(2)^2)+(B3(2)*Pe(2)^3)+(B4(2)*Pe(2)^4);b3=(B0(3))+(B1(3)*Pe(3))+(B2(3)*Pe(3)^2)+(B3(3)*Pe(3)^3)+(B4(3)*Pe(3)^4);b4=(B0(4))+(B1(4)*Pe(4))+(B2(4)*Pe(4)^2)+(B3(4)*Pe(4)^3)+(B4(4)*Pe(4)^4);b5=(B0(5))+(B1(5)*Pe(5))+(B2(5)*Pe(5)^2)+(B3(5)*Pe(5)^3)+(B4(5)*Pe(5)^4);b6=(B0(6))+(B1(6)*Pe(6))+(B2(6)*Pe(6)^2)+(B3(6)*Pe(6)^3)+(B4(6)*Pe(6)^4);b7=(B0(7))+(B1(7)*Pe(7))+(B2(7)*Pe(7)^2)+(B3(7)*Pe(7)^3)+(B4(7)*Pe(7)^4);b8=(B0(8))+(B1(8)*Pe(8))+(B2(8)*Pe(8)^2)+(B3(8)*Pe(8)^3)+(B4(8)*Pe(8)^4);p=0.7;Qs=[];Qs(1)=(Pe(1)*b1)/(1.02*Ua(1).*p*g);Qs(2)=(Pe(2)*b2)/(1.02*Ua(2).*p*g);Qs(3)=(Pe(3)*b3)/(1.02*Ua(3).*p*g);Qs(4)=(Pe(4)*b4)/(1.02*Ua(4).*p*g);Qs(5)=(Pe(5)*b5)/(1.02*Ua(5).*p*g);Qs(6)=(Pe(6)*b6)/(1.02*Ua(6).*p*g);Qs(7)=(Pe(7)*b7)/(1.02*Ua(7).*p*g);UA=0.377*r*600/(ig(4)*io):1:0.377*r*4000/(ig(4)*io);%UA表⽰车速QS=polyval(M,UA);%QS表⽰油耗figure(4);plot(UA,QS,'linewidth',2);title('最⾼档等速百公⾥油耗曲线');xlabel('Ua/(km/h)');ylabel('Qs/L');第三章io=[5.17 5.43 5.83 6.17 6.33]; Va=0.377*r*n(7)./(io.*ig(4)); Ps=46.9366;disp('假设以最⾼档,较⾼转速(n 取3401 ),最经济负荷(即90%负荷⼤约 46.9366Kw )⾏驶时油耗') qs=[];qs(1)=(Ps*b7)/(1.02*Va(1).*p*g); qs(2)=(Ps*b7)/(1.02*Va(2).*p*g); qs(3)=(Ps*b7)/(1.02*Va(3).*p*g); qs(4)=(Ps*b7)/(1.02*Va(4).*p*g); qs(5)=(Ps*b7)/(1.02*Va(5).*p*g);st=[ 17.5813 16.2121 14.5126 13.3775 12.9185];%加速时间:(这⾥以最⾼档〈四档〉、速度由0加速到94.93Km/h 的时间)因与题1.3第三问求法相同,这⾥不在累述,可直接有计算机求得: figure(5);plot(qs,st,'+','linewidth',2) hold onplot(qs,st,'linewidth',2); gtext('5.17') gtext('5.43') gtext('5.83') gtext('6.17') gtext('6.33')title('燃油积极性-加速时间曲线'); xlabel('燃油经济性(qs/L)');ylabel('动⼒性--原地起步加速时间 (st/s)');第四章 4-31)前轴利⽤附着系数为:gf zh b zL +=β?后轴利⽤附着系数为: ()grzh a zL --=β?1空载时:gh b L -=β?0=413.0845所以0??>空载时后轮总是先抱死。
汽车理论matlab验证编程及图

ig=[6.09,3.09,1.71,1]; for i=1:4 n=600:1:4000; t=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^33.8445*(n/1000).^4; ft=t*ig(i)*5.83*0.85/0.367; ua=0.377*0.367*n/ig(i)/5.83; ff=3880*9.8*0.013+2.77/21.15*ua.*ua; mh=3880+5.4/0.367/0.367+0.218*5.83*5.83*ig(i)^2*0.85/0.367/0.367; a=(ft-ff)/mh; m=1./a; str=['r','m','b','c']; plot(ua,m,str(i)); grid on; hold on; end xlabel('速度(Km/h)'),ylabel('加速度倒数(s^2/m)') title('汽车行驶加速度倒数曲线') legend('一档加速度倒数','二档加速度倒数','三档加速度倒数','四档加速度 倒数',2)
legend('一档发动机功率','二档发动机功率','三档发动机功率','四档发 动机功率','汽车行驶阻力功率',2)
画驱动力与行驶阻力平衡图的MATLAB源程序:
ig=[6.09,3.09,1.71,1]; for i=1:4 n=600:4000; t=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4; ua=0.377*0.367*n./ig(i)/5.83; u=ua.*1000/3600; pe=t.*ig(i)*5.83.*u./0.367; str=['r','m','b','c'];
(完整word版)汽车理论课后作业matlab编程详解(带注释)(word文档良心出品)

1.3matlab程序:(1)%驱动力-行驶阻力平衡图%货车相关参数。
m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.000.793];y=0.85;r=0.367;f=0.013;CdA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;n=600:10:4000;%发动机转数转换成汽车行驶速度。
ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;%计算各档位驱动力。
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.84 45*(n/1000).^4;Ft1=Tq*ig(1)*i0*y/r;Ft2=Tq*ig(2)*i0*y/r;Ft3=Tq*ig(3)*i0*y/r;Ft4=Tq*ig(4)*i0*y/r;Ft5=Tq*ig(5)*i0*y/r;%计算行驶阻力。
Fz1=m*g*f+2.77*ua1.^2/21.15;Fz2=m*g*f+2.77*ua2.^2/21.15;Fz3=m*g*f+2.77*ua3.^2/21.15;Fz4=m*g*f+2.77*ua4.^2/21.15;Fz5=m*g*f+2.77*ua5.^2/21.15;%驱动力-行驶阻力平衡图。
plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua1,Fz1,'k',ua2,Fz2,'k', ua3,Fz3,'k',ua4,Fz4,'k',ua5,Fz5,'k');title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');legend('Ft1','Ft2','Ft3','Ft4','Ft5','Ff+Fw')%求最高车速。
汽车理论课后习题Matlab程序详解

陕西理工学院杨飞华1 / 341.3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。
轻型货车的有关数据:汽油发动机使用外特性的Tq-n曲线的拟合公式为23419.313295.27()165.44()40.874()3.8445()1000100010001000qnnnnT=?+?+?式中,Tq为发动机转矩(N?m);n为发动机转速(r/min)。
发动机的最低转速nmin=600r/min,最高转速nmax=4000r/min。
装载质量 2000kg 整车整备质量1800kg 总质量3880kg 车轮半径0.367m 传动系机械效率ηt=0.85 滚动阻力系数 f=0.013 空气阻力系数×迎风面积CDA=2.77m2 主减速器传动比i0=5.83 飞轮转动惯量 If=0.218kg?m2 二前轮转动惯量Iw1=1.798kg?m2 四后轮转动惯量 Iw2=3.598kg?m2 变速器传动比 ig(数据如下表)Ⅰ档Ⅱ档Ⅲ档Ⅳ档Ⅴ档四档变速器 6.09 3.09 1.71 1.00 - 五档变速器 5.56 2.769 1.644 1.00 0.793 轴距 L=3.2m 质心至前轴距离(满载)a=1.974m 质心高(满载)hg=0.9m解:Matlab程序:(1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;2 / 34Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua.^2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw'); zoom on;[x,y]=ginput(1);zoom off;disp('汽车最高车速=');disp(x);disp('km/h');汽车最高车速=99.3006km/h3 / 34(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1.^2/21.15;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100*tan(asin(max(Fi1/G)));disp('汽车最大爬坡度=');disp(imax);disp('%');汽车最大爬坡度=35.2197%(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fw1=CDA*ua1.^2/21.15;Fw2=CDA*ua2.^2/21.15;Fw3=CDA*ua3.^2/21.15;4 / 34Fw4=CDA*ua4.^2/21.15;Fw5=CDA*ua5.^2/21.15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2);deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2);deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2);deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2);deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2);a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([0 99 0 10]);title('汽车的加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5'); a=max(a1);af=asin(max(Ft1-Ff-Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp('假设后轮驱动,最大爬坡度相应的附着率=');disp(C);假设后轮驱动,最大爬坡度相应的附着率=0.42195 / 34(4) >>clearnT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8;G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];nmin=600;nmax=4000;u1=0.377*r*nmin./ig/i0;u2=0.377*r*nmax./ig/i0;deta=0*ig;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);endua=[6:0.01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100武汉理工大学6 / 340)^4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 0 100]);title('汽车2档原地起步换挡加速时间曲线');xlabel('时间t(s)');ylabel('速度ua(km/h)');>> ginputans =25.8223 70.073725.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车理论1.3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h 的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h 的加速时间。
轻型货车的有关数据:汽油发动机使用外特性的Tq-n 曲线的拟合公式为23419.313295.27()165.44()40.874() 3.8445()1000100010001000q n n n n T =-+-+-式中,Tq 为发动机转矩(N •m );n 为发动机转速(r/min )。
发动机的最低转速n min =600r/min,最高转速n max =4000r/min 。
装载质量2000kg整车整备质量1800kg总质量3880kg车轮半径0.367m传动系机械效率ηt=0.85滚动阻力系数f=0.013空气阻力系数×迎风面积C D A=2.77m2主减速器传动比i0=5.83飞轮转动惯量I f=0.218kg•m2二前轮转动惯量I w1=1.798kg•m2四后轮转动惯量I w2=3.598kg•m2变速器传动比ig(数据如下表)Ⅰ档Ⅱ档Ⅲ档Ⅳ档Ⅴ档四档变速器 6.09 3.09 1.71 1.00 -五档变速器 5.56 2.769 1.644 1.00 0.793轴距L=3.2m质心至前轴距离(满载)a=1.974m质心高(满载)hg=0.9mMATlab程序如下:n=600:4000; r=0.367; nt=0.85; f=0.013; CA=2.77; io=5.83; m=3880; g=9.8;Tq=-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4; ig1=5.56;n= linspace(600,4000,40);Ua1=0.377.*r.*n./(ig1.*io);Ft1=(-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4). *ig1.*io.*nt./r;plot(Ua1,Ft1);ig2=2.769; Ua2=0.377.*r.*n./(ig2.*io); Ft2=(-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4). *ig2.*io.*nt./r;ig3=1.644; Ua3=0.377.*r.*n./(ig3.*io); Ft3=(-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4). *ig3.*io.*nt./r;ig4=1.00; Ua4=0.377.*r.*n./(ig4.*io); Ft4=(-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4). *ig4.*io.*nt./r;ig5=0.793; Ua5=0.377.*r.*n./(ig5.*io); Ft5=(-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4). *ig5.*io.*nt./r;Fr=m.*g.*f+(CA/21.15).*Ua5.^2;plot(Ua1,Ft1,Ua2,Ft2,Ua3,Ft3,Ua4,Ft4,Ua5,Ft5,Ua5,Fr);n=600:4000; r=0.367; nt=0.85; f=0.013; CA=2.77; io=5.83; m=3880; g=9.8;Tq=-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4; ig1=5.56;n= linspace(600,4000,41);Ua1=0.377.*r.*n./(ig1.*io);Ft1=(-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4). *ig1.*io.*nt./r;plot(Ua1,Ft1);ig2=2.769; Ua2=0.377.*r.*n./(ig2.*io); Ft2=(-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4). *ig2.*io.*nt./r;ig3=1.644; Ua3=0.377.*r.*n./(ig3.*io); Ft3=(-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4). *ig3.*io.*nt./r;ig4=1.00; Ua4=0.377.*r.*n./(ig4.*io); Ft4=(-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4). *ig4.*io.*nt./r;ig5=0.793; Ua5=0.377.*r.*n./(ig5.*io); Ft5=(-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4). *ig5.*io.*nt./r;Fr=m.*g.*f+(CA/21.15).*Ua5.^2;plot(Ua1,Ft1,Ua2,Ft2,Ua3,Ft3,Ua4,Ft4,Ua5,Ft5,Ua5,Fr);>> n=600:4000; r=0.367; nt=0.85; f=0.013; CA=2.77; io=5.83; m=3880; g=9.8;Tq=-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4; ig1=5.56;n= linspace(600,4000,53);Ua5=0.377.*r.*n./(ig5.*io);Ft5=(-19.313+295.27.*n./1000-165.44.*(n./1000).^2+40.874.*(n./1000).^3-3.8445.*(n./1000).^4). *ig5.*io.*nt./r;Fr=m.*g.*f+(CA/21.15).*Ua5.^2;Ftt= Ft1-Frimax=tan(asin(max(Ftt/(m.*g))));imaxn=600,4000;n= linspace(600,4000,41);Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445.*(n/1000).^ 4m=3880;g=9.8;nt=0.85;r=0.367;f=0.013;CA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;Ff=m*g*f;ig1=5.56;ig2=2.769;ig3=1.644;ig4=1;ig5=0.793;Ft1=Tq*ig1*i0*nt/r;Ft2=Tq*ig2*i0*nt/r;Ft3=Tq*ig3*i0*nt/r;Ft4=Tq*ig4*i0*nt/r;Ft5=Tq*ig5*i0*nt/r;ua1=0.377*r*n/ig1/i0;ua2=0.377*r*n/ig2/i0;ua3=0.377*r*n/ig3/i0;ua4=0.377*r*n/ig4/i0;ua5=0.377*r*n/ig5/i0;Fw1=(CA./21.15).*ua1.^2;Fw2=(CA./21.15).*ua2.^2;Fw3=(CA./21.15).*ua3.^2;Fw4=(CA./21.15).*ua4.^2;Fw5=(CA./21.15).*ua5.^2;a1=(Ft1-Ff-Fw1)/((1+(Iw1+Iw2)/(m*r^2)+(If*ig1^2*i0^2*nt)/(m*r^2))*m);inv_a1=1./a1; a2=(Ft2-Ff-Fw2)/((1+(Iw1+Iw2)/(m*r^2)+(If*ig2^2*i0^2*nt)/(m*r^2))*m);inv_a2=1./a2; a3=(Ft3-Ff-Fw3)/((1+(Iw1+Iw2)/(m*r^2)+(If*ig3^2*i0^2*nt)/(m*r^2))*m);inv_a3=1./a3; a4=(Ft4-Ff-Fw4)/((1+(Iw1+Iw2)/(m*r^2)+(If*ig4^2*i0^2*nt)/(m*r^2))*m);inv_a4=1./a4; a5=(Ft5-Ff-Fw5)/((1+(Iw1+Iw2)/(m*r^2)+(If*ig5^2*i0^2*nt)/(m*r^2))*m);inv_a5=1./a5; plot(ua1,inv_a1,ua2,inv_a2,ua3,inv_a3,ua4,inv_a4,ua5,inv_a5)axis([0 90 0 10])。