基于PID算法的电机控制设计(DSP)
基于DSP的直流电机模糊PID控制系统的研究与仿真

红 等人 采 用 AR M9作 为 直流 电机 的控 制 器『 2 1 陈 桂 等
人设 计 了基 于 F P G A的直 流 电机 速度 控制 器[ 3 1 。 杨隆梓
ቤተ መጻሕፍቲ ባይዱ
等 人设 计 了一 种 由上 位 机 和 A T 8 9 C 5 2相互 通 信控 制
直流 电机 。 以上学 者尽 管采 用 了不 同的处 理器 ,但是
高 、超 调 量 小 等 特 点 ,较好 地满 足变 量 喷 雾 的 控 制 要 求 。
关 键 词 :直 流 电机 ,D S P ,模 糊 P I D 控 制 ,M A T L A B仿 真 ,变 量 喷雾
中 图分 类号 :T P 2 7 3
文 献 标 识 码 :A
文章 编 号 :2 0 9 5 — 5 5 5 3 ( 2 0 1 3 )0 6 — 0 2 7 3 — 0 6
m o t o r b a s e d o n D S P f J 1 . J o u r n a l o f C h i n e s e A g r i c u l t u r l a M e c h a n i z a t i o n , 2 0 1 3 , 3 4 ( 6 ) : 2 7 3  ̄ 2 7 8
理 . 阐述 该 控 制 系 统 的 硬件 结 构 、软 件 流 程 和 控 制 算 法 ,并 使 用 Ma t l a b / S i mu l i n k搭 建控 制 系统 的原 理 图 ,对 控 制 系 统 进 行 仿 真 试 验 。结 果 分 析表 明 : 以 D S P为 控 制 器 并 结 合参 数 自适 应 模 糊 P I D 控 制 的 控 制 系统 ,具 有 响 应 速 度 快 、稳 定 性
基于DSP的电机伺服系统中的模糊PID控制

Fuz y PI Co t o f M o o e v y t m s d o P z D n r lo t r S r o S s e Ba e n DS
L u- uo L a g LI Da I M g , I Xi n , U
( h t eK yLbrt yo C atl n fhr E g er g D l nU i rt o T cnhg, a a 103 C ia T eS t e a o o f os dOf oe n i ei , ai nv s y f eh o) D ln1 2 , hn) a ar aa s n n a e i y i 6
试, 结果表 明 引入模 糊 PD技 术后 其伺 服跟 踪精 度有 了很 大的提 高。 I
关键 词 : 伺服 ; S ;Q P模 块 ; 糊 PD D PeE 模 I
中 图分 类号 :P 7 . T 23 4
文 献标识 码 : A
文章编 号 :0 0—8 2 (0 1 0 0 6 0 10 8 9 2 1 )6— 0 4— 3
mo l ft e n w P c i S 2 28 3 n h n o e r s d t ee tt e r a—i o iin o h — due o h e DS h p TM 3 0 ̄ 3 5 a d t e e c d ra e u e o d t c h e lt me p sto ft emo
p ro ma c sg e t mp o e . y tm tu t r n o to rn i l r n rdu e n d ti a d t ef zy PI e r n e i ra l i r v d S se sr cu e a d c n r lp cp e a ei to c d i eal n h u z D f y i c n rlag rt m sgv n. e e p rme tr s ls s o h tt e s ro ta kn t u a y i r al n r a e . o to lo h i ie Th x e i n e u t h w t a h e v r c ig a' r c s g e ty i c e s d i c
基于DSP的PID控制算法的实现

《数字信号处理与DSP应用》课程论文题目:基于DSP的PID控制算法的实现学号:***********名:***班级:6班专业:电路与系统课程老师:黄乡生二零一二年二月二十日摘要:按偏差的比例、积分和微分进行控制的调节器称为PID调节器,PID 调节器是连续系统中技术成熟、应用最为广泛的一种调节器。
它构简单,参数易于调整,在长期的应用中已积累了丰富的经验。
特别在工业过程中,由于控制对象的精确数学模型难以建立,系统的参数又经常发生变化,运用现代控制理论分析综合要耗费很大的代价进行模型辨识,但往往不能得到预期的效果,所以人们常采用数字PID调节器,并根据经验进行在线整定。
这次课程设计将综合用数字信号处理DSP以及自动控制方面的知识,使用CCS集成开发环境进行代码的编译,仿真,才能完成了本次设计。
关键词:PID控制;DSP;仿真;CCSAbstrat: According to the proportion of deviation, integral and differential controls the regulator called the PID regulator, PID regulator is continuous system mature technology, the most widely used a regulator. Its simple structure, easy to adjust the parameters, in the long-term of the application has accumulated a wealth of experience. Especially in the industrial process, because the controlled objects, accurate mathematical model is hard to develop, the parameters of the system and often changes, the use of modern control theory of comprehensive analysis to take a lot of cost model identification, but often can't get the desired effect, so people often uses the digital PID regulator, and according to the experience of online setting. The courses are designed to be integrated with the digital signal processing DSP as well as the automatic control the knowledge of therespect, use CCS integrated development environment for the compilation of the code, simulation, to complete the design.Keywords: PID Control;DSP;simulation ;CCS前言在数字PID算法是目前一般控制领域中经常使用的自动控制算法,它依据给定的设定值,反馈值,以及比例系数,积分和微分时间,计算出一定的控制量,使被控对象能保持在设定的工作范围,并且可以自动的消除外部扰动。
(完整word版)基于DSP的电机控制模块课程设计

电机控制模块课程设计目录前言 .......................................................................................................................................一、课设要求.......................................................................................................................1、1 课题研究的目的 .......................................................................................1、2 任务..........................................................................................................二、系统总体设计2。
1、系统组成框图...................................................................................................... 2。
2、系统主电路..........................................................................................................2.3、采样调理电路......................................................................................................... 2。
基于DSP电机控制方法研究设计论文
摘要随着DSP技术的发展,DSP的应用范围越来越广,并且伴随着数字化的发展,对电机的控制的精度要求越来越高,DSP数字化处理能力也得到了质的飞跃。
所以学会应用DSP 时非常重要的。
本文详细讨论了无刷直流伺服电机,并推述星形接法的数学模型,并设计了数字控制无刷直流伺服电机总体方案,本文采用PID控制方法来控制电机,详细介绍了PID控制算法。
对DSP种类进行了简单的介绍,并选择以TMS320F2812为基准构建硬件平台,设计了DSP供电电源设计,驱动电路的设计,PWM光电耦合隔离电路的设计,电流的采样电路的设计,对DSP进行保护电路的保护电路的设计等。
在CCS环境下,对程序进行编辑,编写PID控制算法程序,对系统的初始化,编码器模块初始化,捕捉模块的初始化,SCI模块的初始化,以及对数字滤波进行编程。
关键词:DSP;CCS;PWM;无刷直流伺服电机AbstractWith the development of DSP technology, DSP application scope is more and more wide. With the development of digital control is higher and higher, The ability of digital handle has own a qualitative leap.So learn to apply DSP is very important.This paper discusses the brushless DC servo motor in detail .The paper describes the mathematical model of the star connection. I designed the general planning of digital control the brushless DC servo motor, this paper adopts the PID control method to control the motor and introduces the PID control in detail.First the article introduces the DSP types simply and select the hardware platform what is based on TMS320F2812 .I designed the DSP power supply. I designed the drive circuit and the PWM photoelectric coupling isolation circuit.I also designed the sampling circuit and the current of protection .At last I designed the protection circuit.In the CCS environment, I edited the program and written in PID control algorithm.I also completed the initialization of system,the initialization of encoder module , the initialization of capture module ,the initialization of SCI module , and programming of the digital filter.Keywords: DSP; CCS; PWM; brushless DC servo motor目录摘要 (I)Abstract (II)目录 (III)1 绪论 (1)1.1 本课题的研究内容和意义 (1)1.2 国内外的发展概况 (1)1.3 本课题应达到的要求 (2)2 电机的选择及其结构 (3)2.1 步进电机 (3)2.3 选择电机 (5)2.4 本章小结 (5)3 无刷直流电机的工作原理及数学模型 (6)3.1 无刷直流电动机的结构 (6)3.2 无刷直流伺服电动机的位置检测装置 (6)3.2.1 霍尔传感器 (7)3.2.2 定子绕组连接方式 (7)3.2.3 开关管控制方法 (9)3.3 无刷直流电机的暂态数学模型 (10)3.4 本章小结 (11)4 控制方案的总体设计 (12)4.1 控制方案的框图简介 (12)4.2 无刷直流伺服电动机实现控制的方法 (12)4.2.1 数字PID控制算法 (13)4.2.2 数字控制器设计的方法 (14)4.2.3 工程设计调节器的步骤 (14)4.3 PWM信号产生技术 (14)4.4 编码器 (15)4.5 电机相电流检测技术 (17)4.6 本章小结 (17)5 DSP的选择及相应的硬件设计 (17)5.1 DSP芯片TMS320F2812的特点 (18)5.2 控制硬件的设计 (18)5.3 DSP外围电路的设计 (19)5.3.1 电源的设计 (19)5.3.2 DSP的晶体振荡器接口电路 (19)5.3.3 时钟电路的设计 (20)5.3.4 JTAG电路的设计 (20)5.3.5 异步串行接口(SCI)硬件的设计 (21)5.3.6 CAN总线接口硬件设计 (22)5.4 功率驱动逆变电路的设计 (22)5.4.1 IR2130芯片具有以下一些特点 (22)5.4.2 IR2130结构原理图 (23)5.5 电机驱动的设计 (24)5.5.1 自举电容的选择和计算 (25)5.5.2 PWM驱动信号隔离电路 (25)5.6 霍尔传感器信号电路 (27)5.7 正交编码脉冲信号电路 (28)5.8 控制器保护电路设计 (28)5.9 本章小结 (30)6 控制系统的设计 (31)6.1 控制系统设计的基本原则 (31)6.2 软件的设计 (31)6.3 DSP集成开发环境CCS (31)6.4 主程序的设计 (32)6.4.1 系统初始化模块 (37)6.4.2 事件管理器模块 (38)6.4.3 捕捉模块(cap) (39)6.4.4 QEP正交编码器脉冲电路 (40)6.4.5 ADC模数转换模块 (41)6.4.6 SCI模块 (42)6.4.7 PID算法流程图如所示 (44)6.4.8 电流采样数字滤波 (45)6.5 本章小结 (46)7 结论与展望 (47)7.1 结论 (47)7.2不足之处及未来展望 (47)致谢 (47)参考文献 (48)1 绪论1.1 本课题的研究内容和意义随着科学技术的不断进步,现代机电系统的运动状态越来越复杂,系统控制的要求也越来越高。
DSP283352812pid电机控制
----------------------------------------------------------
04-15-2005 Version 3.20
-------------------------------------------------------------------------------------*/
void pid_reg3_calc(PIDREG3 *v)
{
// Compute the error
v->Err = v->Ref - v->Fdb;
// Compute the proportional output
v->Up = _IQmpy(v->Kp,v->Err);
// Compute the integral output
}
v->Ui = v->Ui + _IQmpy(v->Ki,v->Up) + _IQmpy(v->Kc,v->SatErr);
// Compute the derivative output
v->Ud = _IQmpy(v->Kd,(v->Up - v->Up1));
// Compute the pre-saturated output
else
v->Out = v->OutPreSat;
// Compute the saturate difference
v->SatErr = v->Out - v->OutPreSat;
// Update the previous proportional output
基于DSP的无刷直流电机模糊PID控制系统设计
中图 分 类 号 :T 23 P 7 文献标识码 : B
De i n o u z D o r ls s e f b u h e s sg f f z y PI c nt o y t m o r s l s
Ke wo d :DS BLDCM ; z y PI y rs P; Fu z D
O 引 言
随着各种 处理器 的出现和 发展 , 国内外 对无刷 直流 电
机控制系统 的研究也在 不断 的发 展和完 善 , 目前无 刷直 流 电机控制器 的结构有 多种形式 , 由无 刷直 流 电机 专用 集 如 成 控制芯 片实现 , 以单片机 为核心组成 的数 字控制 电路 实 现 , D P芯片为核 心实现 等 。在 系统 控制 算法 方 面 , 以 S 国 内外许多研究 人员也作 了大量 的研 究 : 的提 出了 内模 控 有
片( TMS 2L 2 0 A) 3 0 F 4 7 和无刷直流电机专用集成芯片( 30 5 为核心设计 了系统硬件电路 , MC 3 3 ) 并将 传统 PD控制与模糊控制 I 相结合形成的模糊 PD控制算法应用于该硬件系统 , I 同时设计 了上位监控系统 , 组成 了一个 数字化 、 能化 的无刷 直流 电机 智 控制系统 。实验结果表明, 本控制系统运行稳定 , 控制精度高 , 有着很强的应用推广价值。
Ab ta t sr c .Ast ea p ia in fedo u h e sDC mo o ( h p l to il fBr s ls tr BLDCM ) c n iu st na g 。i rq ie h o to y tm c o t e o e lr e t e ur st ec n r ls se n c n wo ksa l n o to x cl .S h sp p rtk st eDS h p ( a r t bya dc n r l a ty ot i a e a e h P c i TM S 2 L 4 7 )a d t eBL X2 p ca n e e 3 0 F2 0 A n h I M s e ilit— g ae ic i ( C3 0 5 st ec r o d sg h y tm a d r ic i.Th z yPI ag rt m ih i o me r td cr ut M s 3 3 )a h o et e in t es se h r wa ecrut eFu z - D lo ih wh c sfr d
基于单片机pid算法的直流电机速度控制方法

基于单片机pid算法的直流电机速度控制方法基于单片机PID算法的直流电机速度控制方法是一种常用的技术,其基本原理是通过调节PWM(脉宽调制)信号的占空比来控制电机的输入电压,从而实现电机的速度控制。
以下是基于单片机PID算法的直流电机速度控制方法的基本步骤:1.设定目标速度:首先,需要设定电机的目标速度。
这可以通过按键或其他输入设备来实现。
2.采集实际速度:为了实现精确的控制,需要实时获取电机的实际速度。
这可以通过在电机转轴上安装光电编码器或霍尔传感器来实现,这些传感器可以实时检测电机的转速并将其转换为电信号。
3.计算偏差:单片机通过比较目标速度和实际速度,计算出速度偏差。
如果实际速度小于目标速度,偏差为负;反之,偏差为正。
4.应用PID算法:单片机使用PID算法来处理速度偏差。
PID控制器通过比例、积分和微分三个环节来计算控制量,以尽可能消除偏差。
具体的PID参数(如Kp、Ki、Kd)可以根据实际情况进行调整,以获得最佳的控制效果。
5.生成PWM信号:基于PID控制器的输出,单片机生成PWM信号来调节电机的输入电压。
占空比决定了电机输入电压的大小,进而影响电机的转速。
6.实时调整:在整个控制过程中,单片机不断采集电机的实际速度,计算偏差,并调整PWM信号的占空比,以使电机尽可能接近目标速度。
7.显示和保存数据:为了方便调试和观察,可以通过单片机的显示屏实时显示电机的实际速度和偏差。
此外,也可以将重要的数据保存在单片机的内部或外部存储器中。
8.安全保护:为了防止电机过载或意外事故,单片机应具备安全保护功能。
例如,当电机实际速度超过设定速度一定时间时,单片机应自动切断电源或发出报警信号。
基于单片机PID算法的直流电机速度控制方法具有精度高、稳定性好、适应性强等优点,广泛应用于各种需要精确控制电机速度的场合。
dsp电机控制原理

dsp电机控制原理
DSP电机控制原理
电机控制是工业自动化领域中的一个重要方向,其目的是通过电路和控制算法来精确控制电机的运行状态和输出力矩。
DSP(数字信号处理器)被广泛应用于电机控制领域,其算法
能够快速处理电机的输入信号,并根据控制策略调整输出信号,实现对电机运行状态的精确控制。
在DSP电机控制系统中,通常会使用PID(比例-积分-微分)
控制算法。
PID控制算法可以通过对电机的输入信号进行实时
监测和调整,使电机输出力矩稳定在期望值附近。
具体实现PID控制算法的过程如下:
1. 采集电机的输入信号(例如位置、速度、电流等)。
2. 根据目标输出力矩,计算出误差值(目标力矩与实际力矩之间的差异)。
3. 根据一定的调节参数,计算比例项、积分项和微分项,并将它们相加得到控制量。
4. 将控制量经过控制电路,转换成适合电机输入的信号。
5. 输出信号经过功率放大电路,驱动电机运行。
6. 循环以上步骤,实时调整电机的输出力矩。
PID控制算法的核心思想是通过不断调整控制量,使得电机输
出力矩能够稳定在期望值附近。
在实际应用中,可以根据具体的场景和电机特性进行参数调整,以便获得更好的控制效果。
总之,DSP电机控制原理通过数字信号处理器和PID控制算法来实现对电机的精确控制,能够应用于各种自动化和工业控制系统中。
基于PID控制算法的电机转矩控制系统设计
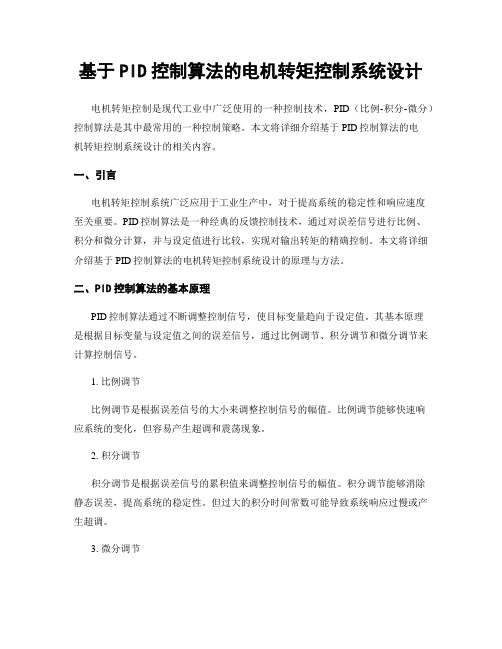
基于PID控制算法的电机转矩控制系统设计电机转矩控制是现代工业中广泛使用的一种控制技术,PID(比例-积分-微分)控制算法是其中最常用的一种控制策略。
本文将详细介绍基于PID控制算法的电机转矩控制系统设计的相关内容。
一、引言电机转矩控制系统广泛应用于工业生产中,对于提高系统的稳定性和响应速度至关重要。
PID控制算法是一种经典的反馈控制技术,通过对误差信号进行比例、积分和微分计算,并与设定值进行比较,实现对输出转矩的精确控制。
本文将详细介绍基于PID控制算法的电机转矩控制系统设计的原理与方法。
二、PID控制算法的基本原理PID控制算法通过不断调整控制信号,使目标变量趋向于设定值。
其基本原理是根据目标变量与设定值之间的误差信号,通过比例调节、积分调节和微分调节来计算控制信号。
1. 比例调节比例调节是根据误差信号的大小来调整控制信号的幅值。
比例调节能够快速响应系统的变化,但容易产生超调和震荡现象。
2. 积分调节积分调节是根据误差信号的累积值来调整控制信号的幅值。
积分调节能够消除静态误差,提高系统的稳定性。
但过大的积分时间常数可能导致系统响应过慢或产生超调。
3. 微分调节微分调节是根据误差信号的变化率来调整控制信号的幅值。
微分调节能够预测系统的变化趋势,抑制超调和震荡现象。
但过大的微分时间常数可能使系统对噪声和干扰敏感。
三、基于PID控制算法的电机转矩控制系统设计步骤基于PID控制算法的电机转矩控制系统设计包括以下步骤:1. 系统建模根据电机的特性和传动装置的传动比,建立电机转矩与控制输入(电流或电压)之间的数学模型。
常用的电机模型有直流电机模型、交流感应电机模型等。
2. 设定转矩根据实际需求,确定期望的转矩曲线。
将期望的转矩曲线转化为设定值信号,作为PID控制算法的输入。
3. PID参数调整根据电机系统的特性和性能要求,选择合适的PID参数。
常用的参数调整方法有经验调参法、试探-比较法和优化算法等。
通过试验和仿真,不断调整PID参数,使系统能够快速响应、稳定运行。
基于PID算法的电机控制研究
基于PID算法的电机控制研究一、绪论电机的控制一直是工业自动化的一个重要领域,而在电机控制中,PID算法(比例积分微分控制)是一种常用的方法。
PID算法是一种反馈控制算法,通过反馈信号来调整控制输出,使系统的输出达到期望值,因此在电机控制中得到了广泛应用。
本文将对PID算法在电机控制中的应用进行研究。
二、PID算法原理PID算法在控制系统中起着非常重要的作用,它是一种经典的控制方法,具有以下三个控制系数:比例系数、积分系数和微分系数。
其中,比例系数控制当前误差量,积分系数控制过去误差量的积累,微分系数控制误差量的变化率,具体公式如下:$p(t) = K_p e(t)$$i(t) = K_i\int_{0}^t e(\tau) d\tau$$d(t) = K_d\frac{d e(t)}{d t}$其中,$e(t)$表示当前误差量,$p(t)$表示比例控制器的输出,$i(t)$表示积分控制器的输出,$d(t)$表示微分控制器的输出,$K_p$、$K_i$和$K_d$分别为比例系数、积分系数和微分系数。
通过调整这三个控制系数的大小,可以达到对系统的控制,从而实现对电机的控制。
三、PID算法在电机控制中的应用PID算法在电机控制中的应用非常广泛,一般用于直流电机、步进电机等电机的速度和位置控制。
1. 直流电机控制直流电机控制一般采用PWM调速,在此基础上使用PID算法进行电机调速控制。
通过测量电机的旋转速度和所需速度之间的误差量,来调整PID算法中的比例系数、积分系数和微分系数,从而实现对电机的控制。
2. 步进电机控制步进电机控制可以分为开环控制和闭环控制两种方式,而PID 算法主要用于闭环控制。
通过测量步进电机驱动器的输出电流和所需电流之间的误差量,来调整PID算法中的比例系数、积分系数和微分系数,从而实现对步进电机的控制。
四、PID算法在电机控制中的优缺点1. 优点a. 反应速度快,动态性能好。
b. 稳态误差小,能够准确控制电机的位置、速度等参数。
基于PID控制的直流电机调速系统设计

基于PID控制的直流电机调速系统【摘要】:在工业自动控制系统和各种智能产品中常常会用用电机进行驱动、传动和控制,而现代智能控制系统中,对电机的控制要求越来越精确和迅速,对环境的适应要求越来越高。
随着科技的发展,通过对电机的改造,出现了一些针对各种应用要求的电机,如伺服电机、步进电机、开关磁阻电机等非传统电机。
但是在一些对位置控制要求不高的电机控制系统如传动控制系统中,传统电机如直流电机乃有很大的优势,而要对其进行精确而又迅速的控制,就需要复杂的控制系统。
随着微电子和计算机的发展,PID控制技术应用越来越广泛,数字控制系统有控制精确,硬件实现简单,受环境影响小,功能复杂,系统修改简单,有很好的人机交换界面等特点。
本设计以上面提到的数字PID为基本控制算法,以单片机为控制核心,产生占空比受数字PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用霍尔传感器将电机速度转换成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。
【关键词】:直流电机;单片机;霍尔传感器;PID控制【Abstract】:In industrial automatic control systems and a variety of smartproducts are often used to drive electric motor, transmission andcontrol, and modern intelligent control systems, motor control requirements for more accurate and rapid adaptation to the environment have become increasingly demanding high. With the development of technology, through the transformation of the motor, there are some requirements of the motor for various applications such as servo motors, stepper motors, switched reluctance motors and other non-traditional motor. However, insome of the less demanding position control motor controlsystems such as transmission control systems, such asconventional DC motors is a great advantage, but to be preciseand quick control, we need a complex control system. With the development of microelectronics and computers, PID controltechnology becomes more widespread, digital control system, precise control and simple hardware implementation, subject toenvironmental impact, functional complexity, system changessimple, good man-machine interface and other exchangecharacteristics.The design for the above-mentioned basic digital PID control algorithm for the control of the microcontroller core, produced by the digital PID algorithm to control the duty cycle of the PWMpulse to achieve the DC motor speed control. At the same timethe use of Hall sensors into pulse frequency motor speedfeedback to the microcontroller to achieve closed-loop speedcontrol, to adjust the speed of the purpose of static error-free.【Key words】:DC motor ; single - chip Microcomputer ; hall position sensor ; PID control目录1绪论 (1)1.1本课程的选题背景 (1)1.2直流电机简介 (2)1.3系统开发软硬件概述 (9)1.4本课题研究的基本内容 (12)2直流电机PID调速系统设计方案 (13)2.1系统总体设计方案 (13)2.2系统设计原理 (28)3直流电机PID系统硬件设计 (36)3.1H桥驱动电路设计方案 (36)3.2调速设计方案 (37)3.3系统硬件电路设计 (38)3.4基于单片机控制流程 (40)4直流电机PID系统软件设计 (42)4.1如何应用PID控制电机转速 (42)4.2调速系统主程序原理框图 (48)4.3中断服务程序原理框图 (49)5结论 (51)6致谢 (51)7参考文献 (52)8附录 (53)1绪论1.1 本课程的选题背景PID控制器(按闭环系统误差的比例、积分和微分进行控制的调节器)自30年代末期出现以来,在工业控制领域得到了很大的发展和广泛的应用。
基于PID控制算法的电机速度控制系统设计与优化

基于PID控制算法的电机速度控制系统设计与优化电机速度控制系统是一种常见的自动控制系统,它通过控制电机的输入信号,使电机的转速达到预定的目标值。
PID控制算法是一种经典的控制算法,通过比较实际输出和期望输出的差异,计算出控制信号来实现目标控制。
在设计和优化基于PID控制算法的电机速度控制系统时,首先需要明确系统的基本要求和性能指标。
常见的要求包括稳态误差、响应时间、控制精度等。
根据这些要求,可以选择合适的PID控制器参数。
首先,需要了解电机的数学模型。
电机的数学模型可以通过系统辨识方法获取,也可以根据电机的物理特性进行建模。
数学模型通常使用微分方程、差分方程或传递函数表示。
然后,可以开始设计PID控制器。
PID控制器由比例项、积分项和微分项组成。
比例项对实际输出和期望输出的差异进行直接比例调整;积分项积累误差并补偿稳态误差;微分项根据误差变化率进行调整。
PID控制器的参数调整对于系统的性能至关重要。
常见的PID调参方法包括经验法、试错法和自整定法。
经验法是一种基于经验的调参方法,通过调整参数的大小,观察系统响应和性能来优化参数。
试错法是一种通过不断尝试不同的参数组合,通过试验和调整的方法来找到合适的参数。
自整定法是一种自动调参方法,可以根据系统的响应自动调整参数。
在调参过程中,需要对系统进行测试和实验。
可以通过给系统输入阶跃信号、方波信号或其他合适的输入信号,观察系统的响应和性能,以确定参数的最优值。
除了参数调整外,还可以通过使用先进的控制算法来优化电机速度控制系统。
例如,模糊控制、自适应控制、模型预测控制等。
这些算法可以根据系统的动态特性和非线性特性,采用不同的控制策略来提高系统的性能。
在进行优化时,还可以考虑引入反馈补偿、前馈补偿等技术。
反馈补偿可以通过测量系统输出和期望输出之间的误差,并将其作为控制信号的一部分,来改善系统的性能。
前馈补偿可以通过预测输出值,提前校正控制信号,减小系统响应的延迟。
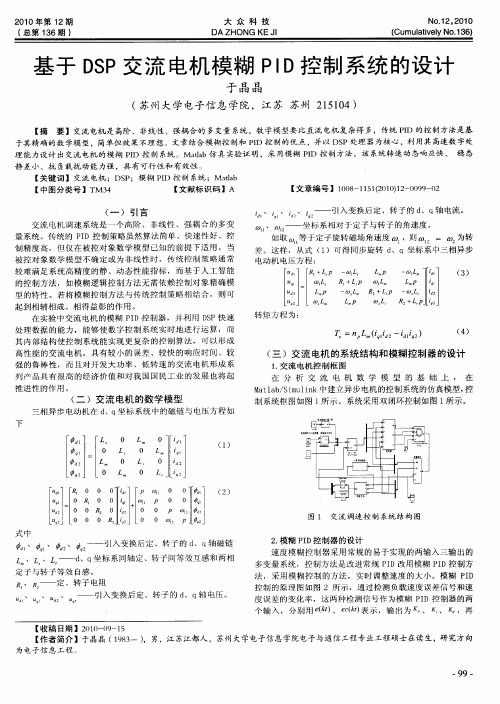
基于DSP交流电机模糊PID控制系统的设计
() 4
高性 能 的 交 流 电机 ,具 有 较 小 的 误 差 、 较 快 的响 应 时 间 、 较 强 的 鲁棒 性 , 而 且 对 开 发 大 功 率 、低 转 速 的 交 流 电机 形 成 系
列 产 品 具 有 很 高 的 经 济 价 值 和 对 我 国 国 民工 业 的 发 展 也将 起
21 0 0年 第 1 2期 ( 第 1 6期 ) 总 3
大 众 科 技
DA ZHO NG KE J
No 1 2 0 . 2, 01
( muai l N .3 ) Cu l v y o1 6 te
基 于 D P交 流 模 糊 P 制 系统 的设 计 S 电机 I D控
推 进 性 的作 用 。
( )交 流 电机 的数 学模 型 二
三 相 异 步 电动 机 在 d 、q坐 标 系 统 中 的磁 链 与 电压 方 程 如
下
d1
。
k 0 L 0
0 L 0 L
L 0ห้องสมุดไป่ตู้
0 L
d 2
L 0
0 L
( ) 引 言 一
交 流 电机 调 速 系 统 是 一 个 高 阶 、 非 线 性 、 强 耦 合 的 多变 量 系 统 。传 统 的 P D 控 制 策 略 虽然 算法 简 单 、快 速 性 好 、控 I
、
、
、
引 入变 换 后 定 、转 子 的 d q 电流 。 、 轴
、
—
—
理 能 力 设 计 出 交流 电机 的模 糊 PD 控 制 系统 。M aa I tb仿 真 实验 证 明 ,采 用 模 糊 PD 控 制 方 法 ,该 系统转 速 动 态响 应 快 、 稳 态 l I
基于PID控制算法的电机速度闭环控制研究
基于PID控制算法的电机速度闭环控制研究一、引言电机是现代工业中最为广泛使用的设备之一,而电机的速度控制对于工业自动化中的许多应用都至关重要。
PID控制算法是一种常用的控制方法,其结构简单、参数调节方便,因此在电机速度闭环控制中得到了广泛应用。
本文旨在研究基于PID控制算法的电机速度闭环控制,并通过实验验证其控制性能。
二、PID控制算法的基本原理PID控制算法是一种基于误差的反馈控制方法,由比例(P)、积分(I)和微分(D)三部分组成。
其基本原理如下:1. 比例控制(P部分):根据误差信号与比例参数的乘积计算控制量,用于快速响应系统变化产生的误差。
2. 积分控制(I部分):根据误差信号与积分参数的乘积计算控制量,用于自动纠正系统长期的累积误差。
3. 微分控制(D部分):根据误差信号、时间导数以及微分参数的乘积计算控制量,用于预测系统未来发展趋势并对其进行调整。
PID控制算法根据实际系统的特性进行参数调节,以使得系统稳定性和控制性能得到优化。
三、电机速度闭环控制系统的搭建1. 硬件平台搭建在实验中,我们选取一个直流电机作为被控对象,并使用电流环进行电机速度的闭环控制。
搭建硬件平台主要包括直流电机、编码器、电机驱动器和控制器等组成。
2. 调节参数选取在PID控制算法中,参数的选取对系统控制性能具有重要影响。
常用的参数调节方法包括试错法、经验公式法和自整定法等。
在本研究中,我们选取自整定法进行参数调节。
具体方法为:- 设置P、I、D参数初值,并将积分部分和微分部分作为反馈控制的参数。
- 通过实验运行系统,观察系统响应特性,根据实际情况逐步调整参数,使系统达到稳定状态。
- 反复调整参数,直到系统达到理想的控制性能。
3. 控制策略设计在电机速度闭环控制中,我们可以采用位置式PID控制策略或增量式PID控制策略。
位置式PID控制策略将控制量作为控制器的输出,而增量式PID控制策略将增量值作为控制器的输出。
根据实际需求,选择合适的控制策略。
基于pid算法的直流电机转速控制系统的设计
基于pid算法的直流电机转速控制系统的设计基于PID算法的直流电机转速控制系统是现代控制系统的一个重要组成部分。
其主要功能是通过调节电机的电压和电流来控制电机的转速,以达到所需的转速控制效果。
本文将介绍如何设计PID算法控制系统,以实现直流电机的转速控制。
首先,我们需要了解PID算法的基本原理。
PID算法是一种基于反馈控制的方法,它通过对系统的误差进行测量和反馈控制,不断调整输出信号以达到所需的控制效果。
PID算法的核心就是三个控制参数:比例系数、积分系数和微分系数。
我们需要通过试验的方法来调整这些参数以达到最佳的控制效果。
接下来,我们就可以开展PID算法直流电机转速控制系统的设计。
首先,我们需要确定系统的控制目标和工作条件,包括期望转速范围、电机额定电压和电流等参数。
接着,我们需要选择合适的线性二次调节器,并通过MATLAB软件进行参数调整和仿真测试。
在参数调整和仿真测试过程中,需要进行多次试验,找到最佳的控制参数,以达到最理想的转速控制效果。
同时,还需要在系统设计过程中,考虑到一些实际应用中可能出现的问题,如电网失电、电机负载变化等因素,保证控制系统的稳定性和可靠性。
最后,我们需要对设计的PID算法直流电机转速控制系统进行实际测试和验证。
通过实现所设计的控制系统,并进行各项测试和实验,验证其控制效果和性能是否满足所需的要求和标准。
综上所述,基于PID算法的直流电机转速控制是一个相对复杂的系统设计工作,需要掌握一定的控制理论和实践经验。
通过认真的系统设计、参数调整和测试验证,可以实现一个高效、可靠的直流电机转速控制系统。
基于DSP的PID控制算法的实现
《数字信号处理与DSP应用》课程论文题目:基于DSP的PID控制算法的实现学号:***********名:***班级:6班专业:电路与系统课程老师:黄乡生二零一二年二月二十日摘要:按偏差的比例、积分和微分进行控制的调节器称为PID调节器,PID 调节器是连续系统中技术成熟、应用最为广泛的一种调节器。
它构简单,参数易于调整,在长期的应用中已积累了丰富的经验。
特别在工业过程中,由于控制对象的精确数学模型难以建立,系统的参数又经常发生变化,运用现代控制理论分析综合要耗费很大的代价进行模型辨识,但往往不能得到预期的效果,所以人们常采用数字PID调节器,并根据经验进行在线整定。
这次课程设计将综合用数字信号处理DSP以及自动控制方面的知识,使用CCS集成开发环境进行代码的编译,仿真,才能完成了本次设计。
关键词:PID控制;DSP;仿真;CCSAbstrat: According to the proportion of deviation, integral and differential controls the regulator called the PID regulator, PID regulator is continuous system mature technology, the most widely used a regulator. Its simple structure, easy to adjust the parameters, in the long-term of the application has accumulated a wealth of experience. Especially in the industrial process, because the controlled objects, accurate mathematical model is hard to develop, the parameters of the system and often changes, the use of modern control theory of comprehensive analysis to take a lot of cost model identification, but often can't get the desired effect, so people often uses the digital PID regulator, and according to the experience of online setting. The courses are designed to be integrated with the digital signal processing DSP as well as the automatic control the knowledge of therespect, use CCS integrated development environment for the compilation of the code, simulation, to complete the design.Keywords: PID Control;DSP;simulation ;CCS前言在数字PID算法是目前一般控制领域中经常使用的自动控制算法,它依据给定的设定值,反馈值,以及比例系数,积分和微分时间,计算出一定的控制量,使被控对象能保持在设定的工作范围,并且可以自动的消除外部扰动。
基于DSP的PID控制器设计与优化
基于DSP的PID控制器设计与优化随着科技的不断发展,控制器也愈加成熟和智能化,尤其是PID控制器。
简单而言,PID控制器是通过对系统输出进行反馈调节,保障系统能够在理想状态下稳定工作的一种控制器,被广泛应用于新能源、工业自动化、航空航天和机器人等众多领域。
本文将详细探讨基于DSP的PID控制器设计与优化。
一、PID控制器概述PID控制器是由比例调节器、积分调节器和微分调节器三部分组成。
其中,比例调节器主要作用是对输入和输出之间误差进行线性调节,实现控制。
积分调节器则用于修正持久性误差,即错误的累积和。
最后,微分调节器则用于修正临时性误差,避免过底月亮未必晴的情况。
因此,PID控制器可以快速响应实际的控制,减少系统振荡和稳定性问题。
二、基于DSP的PID控制器设计基于DSP的PID控制器常用于行业自动化和机器人控制。
具体而言,基于DSP的PID控制器设计主要包含三个方面:硬件设计、软件设计和模块设计。
硬件设计中,需要确定PID控制器的输入和输出接口,并且保证输出与外部设备一致。
例如,3.3V于5V接口、输出拓展接口等等。
随后,够会对芯片进行选择,考虑计算速度和内存大小等因素。
最后,可以通过硬件接口增加参数设置和计算器。
软件设计中,需要确定各种参数的计算方式,例如,PID参数、PID循环计算方式等等。
与此相应的,需要将代码及数据集导入芯片、控制器的载入等流程。
模块设计中,SD模块负责文件读写工作,光标模块负责游标设置和移动功能,而语音助手模块则促成语音助手功能的实现。
模块设计可以根据需要添加和删除具体模块。
三、基于DSP的PID控制器优化基于DSP的PID控制器设计以后,还必须进行优化。
优化的核心在于提高PID 控制器的稳定性和性能。
具体而言,主要包括以下方面:1.更改采样周期采样周期的大小会对控制器带来影响,较小的采样周期意味着更精细的控制,但同时也会决定整个系统的稳定性。
因此,可以在控制器表示中修改采样周期。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
nCount++; nCount%=51200; // 键盘输入标志
nCount1++; nCount1%=100; // 占空比标志
// 速度采样脉冲1Hz方波
nCount2++; nCount2%=T2Hz; // 计数1秒
nJSSpeed++; nJSSpeed%=12000; // 读取速度标志
SPSD1|=0x2400; // set XIOEN=1 FSXM=1, Enable IO,FSR for output
SPSA0=0; // set McBSP0's SPCR1
SPSD0&=0xfffe; // set RRST=0
SPSA0=0x0e; // set McBSP0's PCR1
int speed[100],Fra bibliotekp,lj; float ljh;
char strInput[4];
int i,w1,w2,w3;
// 初始化工作变量
for ( sp=0;sp<100;sp++ ) speed[sp]=0;
sp=nSSS=nCount=nCount1=nCount2=nJSSpeed=0; cKey=0; nInput=tz=wc=0;
#define T100 99 // 100个时钟周期中断一次
#define T2Hz 20000 // 20000个时钟周期读取速度一次
//工作变量-------------------------------------------------------------------------
LCDPutCString(str4,68,15,2,1);
ShowParameters(); // 参数显示
SetForMotorB(); // 设置定时器等参数、启动中断
while ( 1 ) // 主循环
{
if ( nCount==0 ) // 读取键盘标志
if ( nCount2==0 )
{
SPSA0=0x0e; // 设置McBSP0的PCR1寄存器
uWork=SPSD0;
uWork|=0x2800;
uWork^=0x8; // FSXP=~FSXP,BFSX0引脚状态取反
SPSD0=uWork;
}
}
void InitCTR()
{
port8000=0; //初始化CTR
port8000=0x80;
port8000=0;
port8007=0; // 关闭东西方向的交通灯
port8007=0x40; // 关闭南北方向的交通灯
uWork=port8002; // 清除键盘缓冲区
}
void InitDSPBoard()
strInput[nInput]=cKey-'0';
nInput++; if ( nInput>=2 ) nInput=0;
uWork=strInput[0]*10+strInput[1]; // 计算调整速度
w1=uWork%1000/100; w2=uWork%100/10; w3=uWork%10;
port8000=0;
port8007=0x0c0; // 关闭直流电机B
exit(0);
}
// PID算法控制子程序-------------------------------------------------------------------------
void PIDControl(int rk,int yk)
{
ek=rk-yk;
duk=a*ek+b*ek1+c*ek2; // 计算控制输出
ek2=ek1; ek1=ek;
if ( duk>10 ) duk=10; // 幅度限制
tz=(int)duk;
pwm+=tz; // 计算当前占空比
PrintParameters();
}
}
}
}
}
if ( nJSSpeed==0 ) // 读取速度标志
{
nJSSpeed=0;
nSSS=port8003; // 从端口读取速度计数
if ( nSSS>=0 && nSSS<100 ) // 合法性检测
SPSD0|=0x1101; // set RIOEN=1 FSXM=1, Enable IO,CLKR for output,set Motor's direction to 1
SPSA0=1; // 设置McBSP0的SPCR2控制寄存器
SPSD0&=0xfffe; // 标志XRST=0
{
REGISTERCLKMD=0; //DSP主频=8MHz
}
void SetForMotorB()
{
port8007=0x0c0;
SPSA1=1; // set McBSP1's SPCR2
SPSD1&=0xfffe; // set XRST=0
SPSA1=0x0e; // set McBSP1's PCR1
SPSA1=0x0e; // 设置McBSP1的PCR1寄存器
uWork=SPSD1;
uWork|=0x2400; // 设XIOEN=1 FSXM=1,使能通用IO,FSR输出
if ( nCount1>uN ) uWork|=4; // 根据占空比设置FSR状态
else uWork&=0x0fffb;
#include "scancode.h"
#include "ctr.h"
#include "PID.h"
#include <stdio.h>
//定时器分频参数 ------------------------------------------------------------------
nInput=0;
LCDPutString(numbers,104,15,1,1);
LCDPutString(numbers,112,15,1,1);
LCDPutString(numbers,120,15,1,1);
LCDRefreshScreen();
wc=0;
}
nCount3++; nCount3%=3;
if ( nCount3==2 )
{
PIDControl(md,wc); // 调用PID算法控制程序进行控制
uN=100-pwm; // 利用占空比调整控制
ShowParameters(); // 显示各参数值到LCD
{
nScanCode=port8001; // 读扫描码
nScanCode&=0x0ff; // 低8位
if ( nScanCode!=0 )
{
uWork=port8002; // 清除键盘缓冲区
if ( nScanCode==SCANCODE_Num ) break; // NUM键退出
{
if ( speed[i]>=0 && speed[i]<150 )
{
ljh+=speed[i];
lj++;
}
}
wc=( lj==0 )?(0):(ljh/lj);
if ( wc>150 )
{
ek=ek1=ek2=0;
for ( uWork=0;uWork<4;uWork++ ) strInput[uWork]=0;
uN=100; md=83; pwm=0;
InitDSPBoard(); // 初始化ICETEK-VC5416-A板
InitCTR(); // 初始化ICETEK-CTR板
if ( pwm<0 ) pwm=0;
else if ( pwm>99 ) pwm=99;
}
void interrupt time(void)
{
// PWM输出
SPSA1=1; // 设置McBSP1的SPCR2寄存器
SPSD1&=0xfffe; // 设置XRST位=0
LCDPutString(numbers+w1*8,104,15,1,1);
LCDPutString(numbers+w2*8,112,15,1,1);
LCDPutString(numbers+w3*8,120,15,1,1);
LCDRefreshScreen();
SPSA0=0x0e; // 设置McBSP0的PCR1寄存器
SPSD0|=0x2800; // 设置:XIOEN=1 FSXM=1,使能通用I/O功能,FSX用于输出
PrintParameters();
}
}
}
}
// 退出处理
TCR = 0x41f; // 关闭定时器
REGISTERCLKMD=0; // CPU降速到8兆
port8000=0; // 重新初始化ICETEK-CTR板
port8000=0x80;
LCDPutCString(str2,0,47,2,1);