pca9685驱动舵机程序+实例解析
树莓派舵机扩展板 Servo Driver HAT 用户手册

Servo Driver HAT用户手册前言本产品是基于树莓派而设计的PWM/舵机扩展板,通过PCA9685芯片扩展16路舵机控制或者PWM输出,每个通道12位分辨率。
通过I2C接口控制,无需占用额外的引脚。
板载5V稳压芯片,可接电池供电,最大输出3A电流。
适用于控制机械手臂,以及各种舵机机器人。
产品特性输入电压VIN:6V~12V舵机电压:5V逻辑电压:3.3V驱动芯片:PCA9685控制接口:I2C产品尺寸:65mm x 30mm固定孔通径:3.0mm硬件说明板子可以从树莓派上取电不需要额外供电。
也可以通过右边绿色端子VIN接电池供电,输入电压范围6V~12V。
经过板载的5V稳压芯片输出5V电源给舵机和树莓派供电,最大输出电流3A。
A0~A4可以设置PCA9685芯片的I2C设备地址,可以同时接多个Servo Driver HAT最上面的排针是舵机接口,黑色排针是GND(大部分舵机对应的是褐色线), 红色排针是5V电源,黄色排针是PWM信号线,有0~15个通道,可以同时接16个舵机。
注意舵机线不要接反,否则舵机不会转动。
注意:如果接大功率的舵机可能会出现供电不足的现象,需要接更多的电源使用指南开启I2C接口执行如下命令进行树莓派配置:sudo raspi-config选择Interfacing Options -> I2C ->yes 启动i2C内核驱动注意:运行程序后有提示I2C错误,可以运行如下命令打开配置文件sudo nano /etc/modules如果没有这两行语句则添加上去,并保存退出。
i2c-devi2c-bcm2708运行程序我们提供python2和python3的示例程序,功能包括简单的PCA9685库测试程序,wifi遥控程序以及蓝牙遥控程序。
其中wifi和蓝牙遥控发送端是通过手机APP发送指令,需要安装对应的APP(只支持安卓) 手机下载相应的APP并安装。
0805A舵机系统实例说课讲解

Hale Waihona Puke 船舶辅机第8章 舵机 [Steering Gear]
二、阀控型舵机液压系统(HATLAPA –R4V)
7
船舶辅机第8章 舵机 [Steering Gear]
工况选择:
系统图
C1~C4:缸阀(常开) U1~U2:旁通阀(常闭) P1~P4:泵阀(常开)
自动安全切换装置:
两组油缸之间装有自动安全切换装置,可自动 使一对油缸与主泵隔断并彼此旁通,而舵机仍 能继续工作。
8
此课件下载可自行编辑修改,仅供参考! 感谢您的支持,我们努力做得更好! 谢谢!
0805A舵机系统实例
船舶辅机第8章 舵机 [Steering Gear]
一、泵控型舵机液压系统
请打开“0817 泵控型舵 机.swf ”文件观 看动画(鼠标单 击)
2
船舶辅机第8章 舵机 [Steering Gear]
4. 辅油泵的作用 (1)为主油路补油; (2)为主油泵伺服变量机构提供控制油; (3)冷却主泵。
舵机控制中PCA9685控制芯片的运用-航天工程论文-工程论文

舵机控制中PCA9685控制芯片的运用-航天工程论文-工程论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——摘要:文章采用I2C总线通信方式,将PCA9685LED控制芯片应用在舵机控制中。
PCA9685接收主控芯片的指令,通过输出PWM脉冲信号的方式用以控制最多不超过16路舵机或其他输出通道,最终实现了舵机控制的功能。
关键词:I2C总线;PCA9685; PWM; 舵机控制;Abstract:In this paper, the I2 C bus communication mode is adopted, and the PCA9685 LED control chip is applied to the control of the steering gear. The PCA9685 receives the instruction of the main control chip and uses the way of outputting the PWM pulse signal to control the steering gear up to 16 channels or other output channels, and finally realizes the control function of the servo gear.Keyword:I2C bus; PCA9685; PWM; servo control;在自驾仪中,舵机是决定飞机舵面偏转角度的执行机构,一般的无人机需要四个舵机用于控制无人机的俯仰、偏航和滚转,通常由PWM信号进行控制[1]。
PCA9685是一款用于产生16路PWM信号的LED控制芯片,采用I2C总线与主控芯片进行通信[2]。
由于PCA9685具有可以产生16路PWM脉冲、控制精准、编程简单灵活等特点,以其为基础实现的舵机控制能够有限减少硬件和软件设计的复杂度,具有高可靠性[3-4]。
pca控制舵机

pca控制舵机章节一:绪论引言:随着机器人技术的快速发展,舵机在机器手臂、无人机等领域中的应用越来越广泛。
传统的舵机控制方法往往会受到多种因素的影响,如负载变化、电压波动等,导致控制效果不理想。
为了解决这一问题,本文将介绍一种使用主成分分析(PCA)算法来控制舵机的方法。
研究目的:本文旨在利用PCA算法来控制舵机,并通过实验验证其在舵机控制中的有效性和稳定性。
章节二:PCA基本原理与算法2.1 PCA基本原理主成分分析(Principal Component Analysis,PCA)是一种常用的数据降维方法。
其基本思想是通过线性变换将原始数据映射到一个新的空间,使得在新的空间中,数据之间的相关性最小。
2.2 PCA算法PCA算法的主要步骤包括:数据标准化、构建协方差矩阵、求解特征值和特征向量、选择主成分和重构数据。
章节三:PCA舵机控制系统设计3.1 系统框架设计一个基于PCA算法的舵机控制系统,主要包括硬件和软件两个部分。
硬件部分包括舵机、传感器和微控制器等;软件部分包括数据采集、PCA算法实现和舵机角度控制。
3.2 数据采集通过传感器获取舵机角度以及其他相关数据,并进行预处理,包括去噪、滤波等。
3.3 PCA算法实现根据章节二中介绍的PCA算法步骤,编写相应的代码来实现PCA算法,并进行舵机相关的特征提取和降维操作。
3.4 舵机角度控制根据降维后的数据,通过一定的数学模型来控制舵机的角度。
本文采用基于模糊逻辑的控制算法来实现舵机角度的控制。
章节四:实验与结果分析4.1 实验设计设计实验来测试PCA控制舵机系统的效果,并将其与传统的舵机控制方法进行对比。
实验内容包括:舵机角度控制精度、抗干扰能力、响应时间等。
4.2 实验结果分析通过对实验数据的分析,比较PCA控制舵机系统与传统方法的控制效果。
分析结果表明,PCA控制舵机系统具有更好的控制精度和抗干扰能力。
总结:本文通过介绍PCA算法的基本原理和舵机控制系统的设计,验证了PCA在舵机控制中的有效性和稳定性。
此程序为16通道伺服舵机控制程序

此程序为16通道伺服舵机控制程序,使用CodeWizardA VR V1.24.1d编译生成,采用A VR单片机ATmage8515L,晶振频率8MHZ,另有如下几点说明:1.主体电路应该有A VRmega8515L单片机, RS232通讯部件、I2C总线插座、16路伺服舵机控制接口、8MHZ 晶体、A VR-ISP编程下载接口。
2.PB0口的跳线接至高电平时为伺服舵机的实时调试模式,此时应该打开“16通道舵机控制器”软件,并将单片机的串口和电脑的COM1口相连,然后打开单片机通电运行,拖动滑竿,如果舵机能实时跟踪滑块的动作,说明通讯正常。
拖动其他通道的舵机,取好合适的动作值(指令范围0~250)和动作时间(大于120ms 小于5s)后点“添加”即加入了第一条指令,依次可以加入更多的指令;如果哪一条指令有错误,选中它后重新拖动滑竿后点“修改”即可纠正,点“删除”即可删掉这一条指令;也可以打开OFFOCE组件ACCESS2000进行修改。
添加完毕便可运行按“自动播放”进行演示,演示成功可按生成HEX文件,此HEX文件用作24Cxx 的烧入文件。
3.PB0口的跳线接至低电平时伺服舵机的脱机运行模式:前提是在“16通道舵机控制器”软件将各条指令编好后,点“生成文件”(如图3)便可生成压缩数据,然后通过TOP2003编程器把它烧入24CXX系列(这里用的是24C64,8KB的容量) 的E2PROM,将它插入I2C插槽,并将PB0口的跳线接至低电平,接通单片机电源,舵机便可逐条执行刚才做好的指令,指令条数可达2000条。
4.单片机内的程序已经达到控制精度的要求:控制路数-16路,分辨率-0.72°/分度,指令范围0~250,单条指令执行时间-大于120ms小于5s,调速模式-13种,数据压缩率-小于10%注意:由于舵机工作电流较大,使用时应将舵机和单片机分开供电,否则程序容易跑飞。
附:程序主体部分参考于逻辑电子网站公布的3通道舵机控制程序(详细说明可参见),我这里所作的改进只是扩展了通道,以及加入了速度模式控制(由于速度缺乏准确性,这里通过将动作值和动作时间相除去获得运行速度的,后台程序有13种速度模式),它可以控制16路伺服舵机、解决了DIY机器人制作领域(尤其是多关节仿生机器人和带有表演性质的机器人)的基本动作控制要求。
mpu6050控制舵机程序

mpu6050控制舵机程序Chapter 1: Introduction to MPU6050 and Servo Control1.1 BackgroundThe MPU6050 is a popular motion sensor module that combines a 3-axis accelerometer and 3-axis gyroscope. It provides accurate measurements of motion and orientation, making it ideal for applications such as robotics, drones, and motion-based gaming. Additionally, servo motors are widely used in various fields, including robotics and automation, for precise control of angular position. This paper aims to explore the application of theMPU6050 sensor for controlling a servo motor.1.2 ObjectivesThe main objective of this paper is to develop a program that utilizes the MPU6050 sensor to control a servo motor. Specifically, the program will read the sensor data to detect changes in motion and orientation and correspondingly adjust the position of the servo motor. The program will be implemented using Arduino, a popular open-source electronics platform.Chapter 2: MPU6050 and Servo Motor Interface2.1 MPU6050 SensorThe MPU6050 sensor is a 6-DOF (Degrees of Freedom) module that combines a 3-axis accelerometer and 3-axis gyroscope. It communicates with the Arduino board using the I2C serial interface. The sensor provides motion and orientation data in the form of raw sensor values.2.2 Servo MotorA servo motor is a rotary actuator that allows precise control of angular position. It consists of a motor, a control circuit, and a feedback system. Servo motors are widely used in various applications, including robotics and automation. In this paper, a standard servo motor with a rotation range of 0 to 180 degrees will be used.2.3 Interface DesignThe MPU6050 and servo motor will be interfaced with the Arduino board. The sensor's SDA and SCL pins will be connected to the Arduino's I2C pins, while the servo motor's control pin will be connected to one of the Arduino's PWM pins. The Arduino will act as the bridge between the sensor and the servo motor, processing the sensor data and generating appropriate control signals for the servo motor.Chapter 3: Program Implementation3.1 Sensor CalibrationBefore using the sensor, a calibration process is necessary to obtain accurate readings. The program will include a calibration routine that measures the sensor's zero-g offset and sensitivity. This data will be used to compensate for measurement errors and provide accurate motion and orientation information.3.2 Data Reading and ProcessingThe program will continuously read the sensor's raw data, including accelerometer and gyroscope readings. The accelerometer data will be used to detect changes in motion, whilethe gyroscope data will provide information about the orientation. The program will process this sensor data to calculate the desired servo motor position.3.3 Servo Motor ControlBased on the processed sensor data, the program will generate appropriate control signals for the servo motor. The position of the servo motor will be adjusted proportionally to the detected motion and orientation changes. The servo motor position will be converted to the corresponding pulse width modulation (PWM) signal, which will set the desired position of the servo motor.Chapter 4: Experiment and Results4.1 Experimental SetupAn experimental setup will be created to validate the performance of the program. The MPU6050 sensor and the servo motor will be connected to the Arduino board, and the program will be uploaded to the board. Various motion and orientation changes will be induced to observe the corresponding servo motor movement.4.2 Results and AnalysisThe results of the experiment will be analyzed to evaluate the performance of the program in accurately controlling the servo motor based on the MPU6050 sensor data. The accuracy of the servo motor's position and response time will be assessed. Any limitations or improvements will be discussed.4.3 ConclusionIn conclusion, this paper presented a program for controlling aservo motor using the MPU6050 sensor. The implementation and experimental results demonstrate the effectiveness of the programin accurately adjusting the servo motor position based on motion and orientation changes. Further enhancements for real-time applications and other potential improvements will be discussedfor future work.探索宇宙——人类科学的壮举尽管人类在探索宇宙这一任务上还有很长的路要走,但我们已经取得了一些令人瞩目的成就。
pca9685舵机控制板

pca9685舵机控制板Chapter 1: Introduction to PCA9685 Servo Control Board1.1 BackgroundIn recent years, robotics technology has made significant advancements, leading to the development of various robotic applications. One important component used in robotics is the servo motor, which allows for precise control of rotational movement. The PCA9685 servo control board is a popular choice for controlling servo motors due to its simplicity and versatility. 1.2 ObjectiveThe objective of this paper is to provide an in-depth understanding of the PCA9685 servo control board. This includes its working principle, features, and potential applications in robotics and other related fields.Chapter 2: Working Principle of PCA9685 Servo Control Board 2.1 OverviewThe PCA9685 servo control board is a 16-channel, 12-bit pulse width modulation (PWM) controller. It uses the I2C communication protocol to interface with a microcontroller or other control devices.2.2 PWM ControlPWM control is a widely used technique for controlling servo motors. The PCA9685 generates PWM signals with a frequency up to 1.6 kHz, allowing for precise control of servo position and movement. Each channel on the board can be independentlycontrolled, making it suitable for controlling multiple servo motors simultaneously.2.3 Programming and ConfigurationThe PCA9685 servo control board can be easily programmed and configured using the I2C interface. The user can set the output frequency and duty cycle for each channel, allowing for precise control over servo movement. Additionally, the board provides features such as sleep mode and software reset, offering flexibility and convenience in operation.Chapter 3: Features of PCA9685 Servo Control Board3.1 High ResolutionThe PCA9685 servo control board provides a 12-bit resolution for generating PWM signals, resulting in smooth and accurate servo movement. This high resolution allows for precise positioning and control of servo motors, making it suitable for applications that require fine-tuned movement.3.2 Multiple ChannelsWith 16 independent channels, the PCA9685 servo control board offers the capability to control multiple servo motors simultaneously. This feature is particularly useful in robotics and automation projects that require coordination of multiple actuators.3.3 I2C InterfaceThe PCA9685 servo control board utilizes the I2C communication protocol, providing a convenient way to interface with microcontrollers and other control devices. This communicationprotocol allows for easy integration into existing systems and simplifies the control of servo motors.Chapter 4: Applications of PCA9685 Servo Control Board4.1 RoboticsThe PCA9685 servo control board is widely used in robotics applications. It can be used to control the movement of robot arms, legs, and other mechanical components. The high resolution and multiple channels offered by the board enable precise and coordinated motion, making it an ideal choice for robotics projects.4.2 RC VehiclesThe PCA9685 servo control board can also be used in remote control (RC) vehicles, such as cars, boats, and drones. It allows for precise control of steering and other movements, enhancing the overall performance and maneuverability of the vehicle.4.3 Home AutomationThe PCA9685 servo control board can be incorporated into home automation systems to control various devices, such as window blinds, lighting fixtures, and home appliances. Its high resolution and multiple channels provide the flexibility to control multiple devices simultaneously, improving convenience and energy efficiency.In conclusion, the PCA9685 servo control board is a versatile and powerful tool for controlling servo motors. Its high resolution, multiple channels, and easy programmability make it suitable for a wide range of applications in robotics, RC vehicles, and homeautomation. With further development and integration, this control board has the potential to drive advancements in various fields requiring precise servo motor control.Chapter 5: Limitations of PCA9685 Servo Control Board5.1 Voltage LimitationThe PCA9685 servo control board has a voltage limitation of 3.3V, which means the input voltage should not exceed 3.3V. This can be a limitation in applications that require higher voltage levels for servo motor control.5.2 Limited Current per ChannelEach channel on the PCA9685 servo control board has a current rating of 25mA. While this is sufficient for most servo motors, it can be a limitation in applications that require high-power servos or multiple servos drawing a significant amount of current.5.3 Limited Frequency RangeThe PCA9685 servo control board has a frequency range of up to 1.6 kHz. While this frequency range is suitable for most servo motors, some high-speed or specialized servos may require a higher frequency for optimal performance.Chapter 6: Tips for Using PCA9685 Servo Control Board6.1 Power Supply ConsiderationsTo ensure optimal performance and prevent damage to thePCA9685 servo control board, it is important to provide a stable and sufficient power supply. It is recommended to use an external power supply that meets the voltage and current requirements ofthe servo motors being used.6.2 Proper Servo CalibrationBefore using the PCA9685 servo control board, it is essential to properly calibrate the servo motors. This involves setting the correct pulse width range and neutral position for each servo motor to ensure accurate control and movement.6.3 Signal Interference PreventionSince the PCA9685 servo control board uses the I2C communication protocol, it is important to minimize signal interference. This can be achieved by ensuring proper grounding, using shielded cables, and minimizing the distance between the control board and the microcontroller or control device.Chapter 7: Future Developments and Trends7.1 Integration with Artificial IntelligenceOne potential future development for the PCA9685 servo control board is integrating it with artificial intelligence (AI) technology. This would enable the control board to learn and adapt to various movements and scenarios, allowing for more intelligent and autonomous control of servo motors.7.2 Wireless ConnectivityAnother trend in control board technology is the integration of wireless connectivity. Implementing wireless connectivity in the PCA9685 servo control board would enable remote control and monitoring of servo motors, making it more convenient and flexible for various applications.7.3 Improved Power ManagementEfficient power management is a crucial aspect of servo motor control. Future developments of the PCA9685 servo control board could focus on implementing advanced power management techniques to optimize energy consumption and extend battery life in applications that rely on battery power.In conclusion, the PCA9685 servo control board is a powerful and versatile tool for controlling servo motors. While it has some limitations, its high resolution, multiple channels, and easy programmability make it suitable for a wide range of applications in robotics, RC vehicles, and home automation. With ongoing developments and integration of new technologies, the PCA9685 servo control board is expected to keep evolving and driving advancements in servo motor control.。
舵机控制板使用说明V3torobot

舵机控制板使用说明V3.3规格参数1. 舵机电源和控制板电源分开,独立供电2. 控制通道:同时控制32 路。
(舵机速度可调)3. 通讯输入:USB 或者串口(TTL)4. 信号输出:PWM(精度0.5us)。
5. 舵机驱动分辨率:0.5us , 0.045 度。
6. 波特率范围:9600 19200 38400 57600 115200 128000。
7. 支持的舵机: Futaba 、 Hitec 、辉盛、春天,等市面上 98%以上的舵机8. PCB 尺寸:63.5mm×43.5mm。
9. 安装孔间距:55*35.5mm。
10.存储空间:板载16M U 盘。
1)供电说明本模块电源部分是分离设计的,控制板电源和舵机电源是分开供电的,这样不会相互干扰。
a)控制板电源VSSUSB 接口和蓝色端子中的 VSS 和 GND 都可以给控制板供电,两者任选一种即可。
(VSS 的供电范围是 6.5-12V)b)舵机电源VS舵机的供电情况是根据使用的舵机而定,可以查阅舵机的相关参数,若你不了解,可以使用5V 供电。
VS输入多少付电压,给舵机的就是多少付的电压,所以必须严格匹配舵机的电压参数舵机电源输入接口为蓝色接线端子中的 VS 和 GND。
(控制板电源和舵机电源中的GND 是共用的)常规舵机的电压参数MG995、MG996 供电电压为 4.8-6.8V TR213、TR223、1501MG 供电电压为 4.8-7V TR227 供电电压 4.8-7.2V未知舵机,请给 5V 供电(标准舵机 99%都可以用 5V 供电)如果供电电压超过舵机的范围,有可能造成舵机烧坏,或者烧坏舵机控制板。
请用户谨慎操作,查看舵机的相关参数。
舵机电源的其他说明请看 11 页。
2)安装驱动驱动下载地址:/down/usc_driver.exe (全部小写)直接双击 USC_driver.exe ,点击下一步即可安装驱动。
驱动安装过程中如果出现下面的提示,请选择“始终安装此驱动程序软件”。
AT89C2051多路舵机控制电路详解

AT89C2051多路舵机控制电路详解舵机是一种位置伺服的驱动器。
它接收一定的控制信号,输出一定的角度,适用于那些需要角度不断变幻并可以保持的控制系统。
在微机电系统和航模中,它是一个基本的输出执行机构。
以FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部。
舵机的工作原理是:信号由接收通道进入信号解调电路BA66881。
的12脚举行解调,获得一个直流偏置。
该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。
该输出送人电机驱动BA6686,以驱动电机正反转。
当电机转速一定时,通过级联减速齿轮带动电位器R。
,旋转,直到电压差为O,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变幻转变舵机的位置。
舵机的控制办法电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,普通取5V。
注重,给舵机供电电源应能提供足够的功率。
控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。
当方波的脉冲宽度转变时,舵机转轴的角度发生转变,角度变幻与脉冲宽度的变幻成正比。
某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围 3来表示。
舵机控制器硬件电路设计从上述舵机转角的控制办法可看出,舵机的控制信号实质是一个可嗣宽度的方波信号(PWM)。
该方波信号可由、或来产生。
采纳FPGA成本较高,用模拟电路来实现则电路较复杂,不适合作多路输出。
普通采纳单片机作舵机的控制器。
目前采纳单片机做舵机控制器的计划比较多,可以利用单片机的定时器中断实现PWM。
该计划将20ms的周期信号分为两次定时中断来完成:一次定时实现高电平定时Th;一次定时实现低电平定时T1。
Th、T1的时光值随脉冲宽度的变换而变幻,但,Th+T1=20ms。
该办法的优点是,PWM信号彻低由单片机内部定时器的中断来实现,不需要添加外围硬件。
缺点是一个周期中的PWM信号要分两次中断来完成,两次中断的定时值计算较棘手;为了满足20ms的周期,单片机晶振的频率要降低;不能实现多路输出。
51单片机超高精度6路舵机控制程序

void SteeringGearDown(uchar i) {
if(pwm<ms2_5Con) pwm=pwm+10; }
/******************************************************************** * 功能 : 串口中断接收数据 ***********************************************************************/ void ser() interrupt 4 { serVal[0]=serVal[1];
正当我打算放弃 51 单片机的时候,忽然想到一个 算法。将 20ms 的脉冲分成 2 部分,10ms 和 10ms(后来改成 17ms 和 3ms),第一段时间负责计算,将接下来 6 个舵机分别要在什么 时候中断计算 好,存放在变量里,第二段时间开始的时候,将全部舵机输出高电平,然后 依次中断,将舵机置低电平,然后循环。(后来又改成主程序定时排序,定时器中断只负 责 根据数组置高低电平),这样精度就可以达到计时器级别(12M 的晶振是 1μs),但这里我们 只需要 10μs 即可。
SM1=1;//同上
EA=1;
//开启总中断
ES=1; //串行口中断允许位
}
/********************************************************************
* 功能 : 舵机 PWM 中断初始化
***********************************************************************/
基于arduino的快递分拣机器人的设计与实现
• 137•针对目前高校快递站所存在的问题,设计出基于arduino 的自动化快递分拣机器人,同时结合RFID 室内定位技术与树莓派,实现对快递分拣的快速化与自动化分拣。
本文主要描述了机器人的整体设计方案,并且简单描述所利用的RFID 的定位算法。
近几年,随着物联网与电子商务的结合,电商行业迅猛发展,同时也带动了整个物流行业和快递行业,大学院校有着人口数量多,人口密度集中的特点,这使得高校快递站的物流压力越来越大。
目前高校快递站有着人手不足,快递量大等问题。
为了解决其问题,本论文设计了一款能够代替快递站货物上架人员的自动快递分拣机器人(李琪,应用仿真技术对京东亚—物流中心拣货运行效率优化研究[J].农家参谋,2019(05):233-234)。
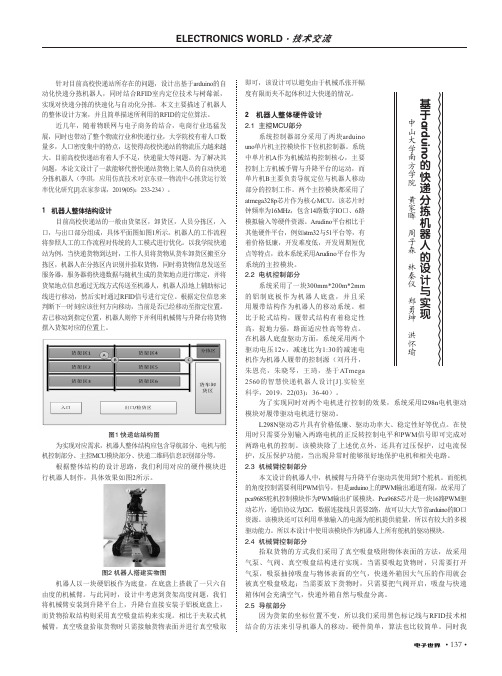
1 机器人整体结构设计目前高校快递站的一般由货架区,卸货区,人员分拣区,入口,与出口部分组成,具体平面图如图1所示。
机器人的工作流程将参照人工的工作流程对传统的人工模式进行优化。
以我学院快递站为例,当快递货物到达时,工作人员将货物从货车卸货区搬至分拣区,机器人在分拣区内识别并拾取货物,同时将货物信息发送至服务器,服务器将快递数据与随机生成的货架地点进行绑定,并将货架地点信息通过无线方式传送至机器人,机器人沿地上辅助标记线进行移动,然后实时通过RFID 信号进行定位。
根据定位信息来判断下一时刻应该往何方向移动,当前是否已经移动至指定位置。
若已移动到指定位置,机器人则停下并利用机械臂与升降台将货物摆入货架对应的位置上。
图1 快递站结构图为实现对应需求,机器人整体结构应包含导航部分、电机与舵机控制部分、主控MCU 模块部分、快递二维码信息识别部分等。
根据整体结构的设计思路,我们利用对应的硬件模块进行机器人制作,具体效果如图2所示。
图2 机器人搭建实物图机器人以一块硬铝板作为底盘,在底盘上搭载了一只六自由度的机械臂。
与此同时,设计中考虑到货架高度问题,我们将机械臂安装到升降平台上,升降台直接安装于铝板底盘上,而货物拾取结构则采用真空吸盘结构来实现。
基于STM32-PCA9685的四足机器人控制系统设计

基于STM32-PCA9685的四足机器人控制系统设计张 亮,赵飞跃(长安大学工程机械学院,陕西 西安 710000)摘 要:近年来,四足机器人成为腿足式机器人研究的热点,控制系统作为整个机器人系统的核心部件之一,对机器人运动控制起着至关重要的作用。
如何开发有效简便的四足机器人控制系统成为重要问题。
文章设计了一款基于STM32-PCA9685的四足机器人控制系统,主控器STM32F407ZGT6通过构建的运动学模型计算机器人12个关节的目标转角值,转化为PWM 波信号指令,再通过IIC 通信协议发送给PCA9685,产生12PWM 波控制信号控制关节舵机转动。
该控制系统极大地节约了STM32F407ZGT6的资源接口,仅需占用其4个接口就可以控制12个舵机实时转动,提高了通信的稳定性。
最后,文章通过四足机器人的单腿摆动实验和站立实验验证了该控制系统的稳定性和实用性。
关键词:四足机器人;STM32;PCA9685;运动学中图分类号:TP242 文献标志码:A 文章编号:1672-3872(2020)14-0117-03——————————————作者简介: 张亮(1996—),男,湖北咸宁人,硕士,研究方向:机器人运动控制。
四足机器人由于运动灵活性、稳定性及优良的可控性,有着广泛的应用前景。
四足机器人控制系统作为其运动控制的关键部分,受到了越来越多的关注。
目前,机器人的运动控制系统种类繁多,如基于Arduino 开发的机器人[1-3];基于STM32开发的机器人[4-6]。
文章基于STM32-PCA9685开发的四足机器人控制系统,基于IIC 通信,仅需占用其4个接口就可以控制12个舵机实时转动。
相对传统仅依靠STM32的控制方式,对STM32接口资源占用少,通信稳定性高。
相对Arduino 控制系统,基于STM32系统对复杂运动行为具有较高的可控性。
最后通过单腿摆动实验和站立端和大小腿均采用聚乳酸(PLA)材料。
舵机简介和C51例程

1、概述舵机最早出现在航模运动中。
在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。
举个简单的四通飞机来说,飞机上有以下几个地方需要控制:1.发动机进气量,来控制发动机的拉力(或推力);2.副翼舵面(安装在飞机机翼后缘),用来控制飞机的横滚运动;3.水平尾舵面,用来控制飞机的俯仰角;4.垂直尾舵面,用来控制飞机的偏航角;遥控器有四个通道,分别对应四个舵机,而舵机又通过连杆等传动元件带动舵面的转动,从而改变飞机的运动状态。
舵机因此得名:控制舵面的伺服电机。
不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。
由此可见,凡是需要操作性动作时都可以用舵机来实现。
2、结构和控制一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。
工作原理:控制电路板接受来自信号线的控制信号(具体信号待会再讲),控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。
舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。
舵机的基本结构是这样,但实现起来有很多种。
例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。
例如,其中小舵机一般称作微舵,同种材料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。
需要根据需要选用不同类型。
舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。
32路舵机控制器程序
32路舵机控制器程序第一章:绪论随着人工智能和机器人技术的快速发展,舵机控制器在机器人和自动化控制领域中起着至关重要的作用。
舵机是一种能够精确控制角度和位置的电机,广泛应用于机器人的运动控制和各种自动化设备中。
本章主要介绍论文的研究背景和意义、研究目的和内容、研究方法和技术路线以及论文的结构安排。
第二章:舵机控制器的原理与设计本章主要介绍舵机控制器的原理和设计要点。
首先,对舵机的基本原理进行介绍,包括舵机的结构组成、运动原理以及控制原理。
然后,对32路舵机控制器的设计目标和要求进行阐述,包括控制精度、稳定性、响应速度等方面的要求。
接下来,介绍舵机控制器的硬件设计,包括电源电路、控制电路、通信接口等。
最后,介绍舵机控制器的软件设计,包括驱动程序的编写、舵机控制算法的设计等方面内容。
第三章:32路舵机控制器的实验与仿真本章主要介绍对32路舵机控制器进行的实验和仿真结果。
首先,介绍实验的目的和设计,包括舵机控制器的性能测试和功能验证。
然后,介绍实验过程和实验数据的采集方式。
接着,展示实验结果和数据分析,包括舵机控制器的性能指标,如控制精度、稳定性、响应速度等方面的评价。
最后,对实验和仿真结果进行讨论和分析,并提出改进措施和优化方案。
第四章:总结与展望本章主要对论文进行总结与展望。
首先,对本论文的研究内容、结果和创新点进行总结。
然后,对该舵机控制器的优点和不足进行讨论,提出改进和优化的建议。
接着,对舵机控制器领域的发展趋势进行展望,并提出未来的研究方向和重点。
最后,对本论文的贡献进行总结,并对读者提出一些建议和启示。
通过以上四个章节的论文撰写,可以全面系统地介绍32路舵机控制器的原理、设计、实验和性能评估,并对未来发展进行展望,为舵机控制器的研究和应用提供一定的参考和指导。
第一章:绪论随着人工智能和机器人技术的快速发展,舵机控制器在机器人和自动化控制领域中起着至关重要的作用。
舵机是一种能够精确控制角度和位置的电机,广泛应用于机器人的运动控制和各种自动化设备中。
995舵机控制

995舵机控制995舵机控制第一章简介1.1 研究背景舵机是一种能够精确控制角度的电机,广泛应用于机器人、航模、智能家居等领域。
995舵机是一款高性能的舵机,具有精准的角度控制、大扭矩输出和高速响应等特点,因此在工业控制和自动化领域中得到广泛应用。
1.2 研究目的本论文旨在探究995舵机的控制方法和技术,为舵机的应用提供可行的控制方案,进一步推动舵机的发展和应用。
1.3 论文结构本论文分为四个章节。
第一章是引言,介绍舵机的背景、研究目的和论文结构。
第二章是995舵机的原理和参数分析。
第三章是995舵机的控制方法和技术。
第四章是结论,总结研究结果并提出下一步的研究方向。
第二章 995舵机的原理和参数分析2.1 995舵机的原理995舵机通过PWM信号控制电机的转动角度,其电机通过减速装置驱动输出轴的角度转动。
PWM信号的占空比与输出轴的具体角度成正比,因此可以通过改变PWM信号的占空比来实现舵机输出轴的精准控制。
2.2 995舵机的参数分析995舵机的重要参数包括扭矩、速度、转向角度和工作电压等。
扭矩是衡量舵机输出能力的重要参数,速度则决定了舵机的响应速度。
转向角度决定了舵机可以转动的角度范围,工作电压决定了舵机正常运行的电压范围。
第三章 995舵机的控制方法和技术3.1 PWM信号控制方法995舵机通过改变PWM信号的占空比来控制输出轴的转动角度。
具体可以通过单片机或者控制器产生PWM信号,然后通过舵机对应的控制输出线连接舵机,最后改变PWM信号的占空比即可实现舵机的角度控制。
3.2 位置反馈控制技术通过给舵机添加位置反馈装置,可以实现精确的角度控制和位置闭环控制。
可以使用光电编码器等位置传感器获取输出轴的实际位置,然后与目标角度进行比较,通过控制器对PWM信号进行调整,实现舵机转动角度的闭环控制。
第四章结论本论文主要研究了995舵机的控制方法和技术。
通过对995舵机的原理和参数进行分析,可以了解舵机的工作原理和性能特点。
pca9685驱动舵机程序+实例解析

pca9685驱动舵机程序+实例解析
pca9685 驱动舵机程序+实例解析概述
这是一个采用i2c 通信,内置了PWM 驱动器和一个时钟。
这意味着,这将和TLC5940 系列有很大不同。
你不需要不断发送信号占用你的单片机!
它是5V 的兼容,这意味着你还可以用3.3V 单片机控制并且安全地驱动到6V 输出(当你想控制白色或蓝色指示灯用3.4+正电压也是可以的)
6 地址选择引脚使你可以把62 个驱动板挂在单个i2c 总线上,总共有992 路PWM 输出。
那将是非常庞大的资源。
约1.6Khz 可调频PWM 输出
为步进电机准备输出12 位分辨率,这意味着在60Hz 的更新率能够达到4us 分辨率。
pca9865中树莓派清除当前占空比的代码

PCA9865中树莓派清除当前占空比的代码今天我想和大家共享的主题是PCA9865中树莓派清除当前占空比的代码。
在我们深入探讨这个主题之前,让我们先来了解一下PCA9865和树莓派的相关知识。
PCA9865是一款16通道的PWM控制器,它可以通过I2C接口和树莓派进行通信。
PWM(脉冲宽度调制)是一种调制方式,通过控制信号的占空比来实现对电路的控制。
在嵌入式系统中,PWM被广泛应用于控制舵机、LED灯等设备。
树莓派是一款小巧的单板电脑,具有丰富的GPIO接口和丰富的硬件资源。
通过树莓派和PCA9865的搭配使用,我们可以实现对多路PWM信号的集中管理和控制。
现在让我们来探讨如何在PCA9865中清除当前占空比的代码。
我们需要明白清除当前占空比的意义和应用场景。
在实际应用中,我们可能需要在某些情况下将PWM信号的占空比清零,例如在控制舵机时将舵机还原到初始位置。
接下来,我将以从简到繁的方式逐步介绍如何在PCA9865中实现清除当前占空比的代码。
1. 我们需要使用树莓派的I2C接口来初始化PCA9865模块。
通过调用相应的库函数,我们可以轻松地与PCA9865建立通信连接,确保我们可以对其进行控制和配置。
2. 接下来,我们需要编写代码来设置PCA9865的相应寄存器,以实现清除当前占空比的功能。
通过对PCA9865的寄存器进行设置,我们可以实现对PWM信号的占空比进行灵活的控制。
3. 在代码编写过程中,我们还需要考虑如何优化代码,确保其性能和稳定性。
在实际应用中,由于系统的复杂性和稳定性要求,代码的优化至关重要。
在实际编写代码的过程中,我们还需要考虑一些实际情况,例如异常处理、错误处理等。
这些都是保证代码稳定性和可靠性的重要因素。
总结回顾通过以上的介绍,我希望能够帮助大家对PCA9865中树莓派清除当前占空比的代码有一个初步的了解。
在实际应用中,清除当前占空比的功能是非常实用和必要的,通过合理的代码编写和优化,我们可以实现对PWM信号的灵活控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
pca9685 驱动舵机程序+实例解析概述
这是一个采用i2c 通信,内置了PWM 驱动器和一个时钟。
这意味着,这将和TLC5940 系列有很大不同。
你不需要不断发送信号占用你的单片机!
它是5V 的兼容,这意味着你还可以用3.3V 单片机控制并且安全地驱动到6V 输出(当你想控制白色或蓝色指示灯用3.4+正电压也是可以的)
6 地址选择引脚使你可以把62 个驱动板挂在单个i2c 总线上,总共有992 路PWM 输出。
那将是非常庞大的资源。
约1.6Khz 可调频PWM 输出
为步进电机准备输出12 位分辨率,这意味着在60Hz 的更新率能够达到4us 分辨率。