数字电子罗盘 型号
罗盘的种类和用法
罗盘的种类和用法全文共四篇示例,供读者参考第一篇示例:罗盘是一种常用的测量工具,它可以帮助人们确定方向和位置。
罗盘的种类有很多,主要可以分为传统罗盘和电子罗盘两大类。
传统罗盘主要依靠磁铁的指向来确定方向,而电子罗盘则利用电子技术来实现方向的测量。
下面将对罗盘的种类及其用法进行详细介绍。
一、传统罗盘的种类及用法1. 指南针罗盘:指南针罗盘是最常见的一种传统罗盘,它包括一个磁针和一个刻度盘。
磁针会自动指向地球磁场方向的南北方向,从而帮助人们确定方向。
使用时,只需将罗盘平放,等待磁针静止后,读取磁针指向的方向即可确定方位。
2. 旋转罗盘:旋转罗盘是一种具有旋转盘的传统罗盘,它可以通过旋转盘来测量方向。
使用时,将罗盘放平,旋转盘调整至零刻度,然后转动盘子与罗盘一起转动,当磁针指向N时,读取指向的角度即为方向。
3. 剖面罗盘:剖面罗盘是一种用于测量地质剖面的罗盘,它可以帮助地质工作者测量矿石的方向和倾角。
使用时,将罗盘置于矿石表面,然后调整水平仪,测量矿石的倾斜角度和方向。
1. 数码罗盘:数码罗盘是一种结合了电子技术的罗盘,它可以通过数字显示方向信息。
数码罗盘通常具有更精确的测量功能和更多的功能,例如高度测量、坡度测量等。
使用时,只需将数码罗盘对准目标,即可读取数字显示的方向信息。
2. GPS罗盘:GPS罗盘是一种由GPS技术实现的方向测量工具,它可以通过卫星信号来确定位置和方向。
使用时,只需打开GPS罗盘,即可获取当前位置的坐标和方向信息。
GPS罗盘广泛应用于户外探险、航海、航空等领域。
3. 惯性导航罗盘:惯性导航罗盘是一种结合了惯性导航技术的罗盘,它可以通过惯性传感器来测量方向和位置。
惯性导航罗盘具有更高的精度和更强的稳定性,适用于需要高精度定位的领域。
罗盘是一种非常实用的测量工具,它可以帮助人们确定方向和位置。
不同种类的罗盘具有不同的特点和用途,可以根据实际需求选择合适的罗盘。
希望本文对您了解罗盘的种类和用法有所帮助。
PNI电子罗盘系列(二维罗盘_三维罗盘)

俯仰 ≤80°时,为0.5° 重复性:0.05°rms
俯仰 ≤86°时,为1.0°
重复性:0.05° TCM-Prime 倾角补偿数字罗盘 磁感应技术 任何环境下都能保证精度
倾斜 >70°时,精度为0.8° 分辨率:0.1° 温度
分辨率:0.1° 重复性: ±0.05° 操作温度: -40° to +85° C
重复性: ±0.05° 范围±90° 存储温度: -40° to +125° C
倾斜信息 电压需求 接口:数字式RS232
高分辨率罗盘航向:0.01 °
高精度罗盘航向:2 °
非易失性存储器:当电源变化时,保持标定
多种测量模式:罗盘航向或者磁场
大测量范围: ±1100 μT (±11 Gauss)
高分辨率:0.015μT (0.00015Gauss)
数字接口
应用:
高性能磁场感知 、高性能固态导航 、测量设备 、机器人系统 、车辆探测 、消费者市场 、安全探测
PNI电子罗盘系列(二维罗盘/三维罗盘)
一、两轴罗盘 产品图片 型号 MicroMag2 V2Xe 主要技术参数及应用 特点:
双轴磁传感器模块 低功耗:来自VDC时电流小于500μA 操作电压3.2VDC
尺寸:14×11×2.8mm
大的磁场测量范围:±1100μT(±11Gauss)
倾斜 <70°时,精度为0.3° 分辨率:0.1° 睡眠模式:0.6mA
倾斜 >70°时,精度为0.5° 重复性: ±0.05° 温度
分辨率:0.1° 范围 操作温度: -40° to +85° C
HMR3500数字磁罗盘套件 用户手册说明书
HMR3500数字磁罗盘套件用户手册目录1. 前言 (3)1.1 版本 (4)2. 操作原理 (4)2.1 电子硬件 (5)2.2 信号处理 (5)3. 安装 (6)3.1 罗盘安装 (6)3.2 电源 (7)3.3 线路连接 (8)4. 测试考虑因素 (9)4.1 主机 (9)4.2 磁补偿 (9)4.3 发光二极管显示器 (10)4.4 串行数据接口 (10)5. 测试软件 (11)5.1 测试软件安装 (11)5.2 演示概要 (11)5.3 启动 (12)5.4 请求和指令 (13)5.3.1 文件菜单 (13)5.4.1 视图菜单 (14)5.4.3 罗盘菜单 (16)5.4.4 罗盘自差补偿 (19)5.5.5 帮助 (21)5.5 数据记录 (21)5.5.1 文件描述 (21)6. 软件消息接口 (23)6.1 信息包(包)格式 (23)6.2 数字数据格式 (24)6.3 协议 (24)6.4 消息描述 (25)6.4.1 软件复位 (27)6.4.2 打开电源 (27)6.4.3 设置波特率值 (28)6.4.4 自检测 (29)6.4.5 状态 (30)6.4.6 刻度初始化 (30)6.4.7 设置电源上升的默认值 (31)6.4.8 磁偏差初始化 (33)6.4.9 地磁场模型-WMM (34)6.4.10 版本 (35)6.4.11 罗盘定向 (36)6.4.12 罗盘磁力补偿 (37)6.4.13 DORIENT消息传输率 (39)7. 术语和缩写词 (40)8. 参考文献 (41)插图目录图1:HMR3500数字磁罗盘电子元件 (3)图2:HMR3500数字磁罗盘模块示意图 (4)图3:工程评估套件硬件 (6)图4:安装尺寸 (7)图5:CompassHost程序主窗口显示器 (12)图6:状态浏览窗口 (15)图7:导航控制窗口 (15)图8:对话框初始化 (16)图9:磁偏差对话框 (18)图10:罗盘磁补偿过程 (20)表格目录表1:接口引出针脚的定义 (8)表2:数字数据格式 (24)表3:消息列表 (26)1.前言非常感谢阁下从Honeywell购买HMR3500数字磁罗盘工程评估成套件。
电子罗盘
温度影响
传感器的温度系数也将影响航向角的精度, 两种需要考虑:一种是偏移随温度的漂移,另一 种是灵敏度温度系数。由于HMC5883l三个相互垂 直轴x、y 、z在同一个封装中,他们的温度系数 匹配的很好,这样三轴经历相同的温度变化也相 同。X和y的比率没有太大的影响。磁阻传感器的 偏移随温度漂移并不匹配,两个传感器可能反向 漂移,对航向角产生较大误差,在磁阻传感器中 采取复位和置位开关电路进行补偿。
系统误差补偿,得到载 体的姿态参数,将它们通过
串口在上位机实时输出。
复位电路
Hx 信 号
三维磁阻传感器 Hy 调 Hz 理 电 路
Gx
双轴加速计 Gy
A/D 转换器
MCU
RS22
上位机
电子磁罗盘结构示意图
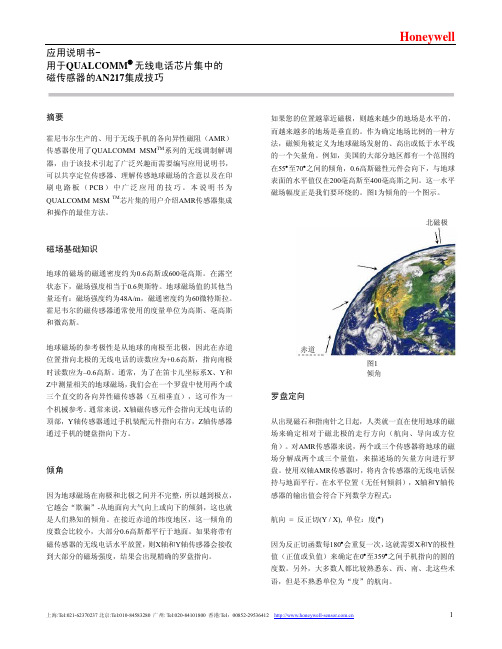
电子磁罗盘基本原理
地球的磁场强度为0.5—0.6gauss,无论何 地,磁场的水平分量永远指向磁北,这是所有电 子罗盘的制作基础。传统的导航定位,通过以下 三个姿态参数:航向角(α),俯仰角(β),横滚 角(γ)。将磁阻传感器的三个敏感轴沿载体的三 个坐标轴安装,分别测量地磁场磁感强度H在载体 坐标系三个坐标上的投影分量(Hx,HY,Hz)。在 地 平 坐 标 系 中 , 磁 阻 传 感 器 的 三 轴 输 出 为 (HR-X, HR-Y, HR-Z),如下图示所示。
电子罗盘主要分为磁通门、磁阻式和霍尔元件 三种。磁通门传感器是由一套环绕磁芯的线圈组成, 该磁芯配有励磁电路,能够提供低成本的磁场探测 方法,但它们体积偏大、易碎、响应时间慢。霍尔 效应磁传感器的优点是体积小,重量轻,功耗小, 价格便宜,接口电路简单,特别适用于强磁场的测 量。但是,它又有灵敏度低、噪声大、温 度性能 差等缺点。虽然有些高灵敏度或采取了聚磁措施霍 尔器件也能用于测 量地磁场,但一般都是用于要 求不高的场合。
AN217-数字罗盘应用于移动电话的参考设
2
上海:Tel:021-62370237 北京:Tel:010-84583280 广州: Tel:020-84101800 香港:Tel:00852-29536412
服务区域
(lat,long) 航向
服务区域
(latB,B longBB)
增量读数
X轴幅值
无磁性干扰 (标准圆)
Y轴幅值
图5 无磁性干扰
由于近处硬铁源的残余通量会在传感器元件中与地球磁场 相结合,X轴和Y轴传感器的旋转输出图将趋向于更改圆的 中心点,而且可能会是绘制的输出读数椭圆化。图6显示的 是传感器受典型硬铁效应影响而得出的绘图。
始新校准变量的计算。这些变量收集传感器的Xmax值、 Xmin值、Ymax值和Ymin值,进行轴的偏置和比例因子的 计算。 (注:max为最大值,min为最小值)
Honeywell
测试,以检测传感器读数的变化。图4所示即为打破设计 规则的镍镀层0805电阻器端盖对临近的HM1052磁传感器 造成的软铁效应。注意,传感器封装件中的通量分散和磁 通线的弯曲(变形)。
磁通路径
0805
SMT 电阻器
HMC1052L 磁传感器
图4 软铁效应
硬铁畸变
拥有残余磁性的含铁物体被称为硬铁。现今,大多数无线 电话内均含有一部分硬铁,通常扬声器组件含有此类硬 铁,有些电池内也含有。电池的危害作用较小,如需要, 也可进行消磁,以除去其对邻近传感器的硬铁效应。现在, 大多数电池盒和化学物质均为非金属物质,而且除非导体 距离传感器太近,否则它们所造成的磁场畸变效应均较 小。
手机罗盘的校准
软铁效应可以通过将含铁元件远离磁传感器来解决,一些 硬铁效应可以在将磁传感器输出值传递至航向计算程序 前,从中减去相当数值来算术性地减去。确定与原始磁传 感器数据的偏差值这一任务被称为校准程序。在清洁的磁 性环境中,X轴和Y轴传感器的输出会在二维曲线图中绘制 一个标准圆,这是由于传感器沿所有航向旋转。(见图5)
盛瑟传感电子罗盘磁场传感器模块SM07-DC说明书
电子罗盘磁场传感器模块(型号:SM07-DC)使用说明书版本号:1.1实施日期:2021.9.22电话:邮箱:网址:https://声明本说明书版权属成都盛瑟传感技术有限公司(以下称本公司)所有,未经书面许可,本说明书任何部分不得复制、翻译、存储于数据库或检索系统内,也不可以电子、翻拍、录音等任何手段进行传播。
感谢您使用盛瑟传感的系列产品。
为使您更好地使用本公司产品,减少因使用不当造成的产品故障,使用前请务必仔细阅读本说明书并按照所建议的使用方法进行使用。
如果您不依照本说明书使用或擅自去除、拆解、更换传感器内部组件,本公司不承担由此造成的任何损失。
您所购买产品的颜色、款式及尺寸以实物为准。
本公司秉承科技进步的理念,不断致力于产品改进和技术创新。
因此,本公司保留任何产品改进而不预先通知的权力。
使用本说明书时,请确认其属于有效版本。
同时,本公司鼓励使用者根据其使用情况,探讨本产品更优化的使用方法。
请妥善保管本说明书,以便在您日后需要时能及时查阅并获得帮助。
成都盛瑟传感技术有限公司电话:************邮箱:****************网址:https://电话:************邮箱:****************网址:https://一、产品描述模块内部自带电压稳定电路,工作电压3.3V-5V,引脚电平兼容3.3V/5V的嵌入式系统,连接方便。
支持串口、IIC两种数字接口,IIC是直接连接芯片,方便用户选择最佳的开发连接方式。
串口可输出由磁场解析的航向角度,最高100Hz数据输出速率。
输出速率0.1~100Hz可调节。
2层PCB板工艺,更薄、更小、更可靠。
输出两种模式:串口模式、IIC模式。
电话:************邮箱:****************网址:https://二、性能参数产品型号SM07-DC 传感器类型半导体系列供电电压DC 3.3V~5V/建议+5V供电工作电流小于6毫安模块体积15.24mm *15.24mm *7.8mm 焊盘间距上下100mil(2.54mm)左右600mil(15.24mm)测量内容三轴的磁场和角度通信方式IIC通信和串口通信通信速率9600回传速率0.1-100HZ可调节灵敏度3000LSB/Gauss 量程-8Gauss ~+8Gauss三、引脚说明四、硬件连接电子罗盘磁场传感器模块与计算机连接通信,需要USB转TTL电平的串口模块。
M30 使用说明书

2.5 设备状态/调节背光
开机状态,按一下电源键,设备将进入背光 设置界面。在此页面可查看设备基本状态。 左右拨动“方向键” ,调节背光亮度。按“退 出”键返回。
斗信息技术有限公司注册商标。
1.2 产品特性
易于使用 — 菜单简洁,界面直观, NAVA® (M)系列手持 GPS 接收机让首次使用 GPS 手持机的用户,体验熟练用户能享受的全部功 能。 可扩展存储空间 — 使用 Micro SD 卡进行扩充, 可实现更大容量存储,使您不必再担心内存不足 问题。 3 米精度 — 48 个并行通道提供更高的定位精 度。同时还可接收 SBAS(MSAS、WAAS、EGNOS) 差分信号。 三轴电子罗盘 (M60) — 无论您身在何处,即使 没有 GPS 定位,仍能知道您面朝何方。 气压计(M60) — 灵敏的气压计能实时提供气压 信息,亦可使用气压计进行高程测量。 内置地图 — 内置全国城镇点图、 基础图、 详图; 等高线图也可定制用户地图。 供电模式 — 专用锂电池, 20 小时工作时间, 使 您在野外不必再为仪器没电而犯愁。 广泛的数据兼容性 — 可将数据导出为 GPX 格 式;更可兼容 Google Earth 用户数据。 1
2 基本操作
2.1 按键介绍
查找 方向键
查找航点、兴趣点等信息 移动屏幕上的光标,选中菜单中的选项
2.2 安装电池
NAVA® (M)系列手持 GPS 接收机使用专用锂 电池。另外,NAVA® (M)系列手持 GPS 接收机内 部还设有备用电池,在您更换电池时数据不会丢 失。 2.2.1 安装锂电池 将设备后盖的 D 型金属环拉起后逆时针旋
警
告
1、开车时请不要操作该设备 请勿在开车时操作该设备。请将车辆停靠在 安全地带或由其他乘客来操作。开车时注意力不 集中会给您自己或他人带来危险。 2、该设备提供的定位导航信息仅供参考 虽然 NAVA® (M)系列 GNSS 手持机是一个精 密的电子导航辅助产品,但是仍然可能因为使用 者的不当操作或者因外界因素干扰而产生一定 的错误,因此使用者需根据实际情况进行判断避 免可能发生的危险。使用者需自行承担在使用过 程中的各类风险。 3、小心使用 全球卫星定位系统(GPS)是由美国政府操作, 并唯一负责其网络的精度和维护。定位的精度会 受到美国政府周期性地调整 GPS 卫星轨道及其 发射信号的影响,也会受到美国国防部的民用政 策和联邦无线导航计划的影响。精度还会受到不 好的卫星几何分布和障碍物的影响,如建筑物和 大树。
SEC295M 九轴全姿态电子罗盘 技术手册说明书

SEC295M 系列九轴全姿态电子罗盘技术手册●卫星追踪●石油地质勘井●光测距仪●GPS 辅助导航主要特性应用领域无人驾驶运载车辆在执行复杂的任务时往往需要精确的航向信息,但是目前的航姿参考系统在遇到磁干扰时往往很容易迷失方向,不规则运动过程也容易导致误差,甚至在静态环境中也不准确。
SEC295M 九轴姿态航向参考系统是北微传感专门为存在磁干扰和动态运动环境提供高精度横滚、俯仰和方位测量的惯性产品。
该产品包涵9自由度传感器:3轴加速度传感器,3轴磁传感器和3轴陀螺仪。
通过优化的扩展卡尔曼滤波算法,产品实时输出高精度姿态信息。
SEC295M 专门为提高磁罗盘的抗干扰能力而设计,当铁性干扰物靠近产品时,SEC295M 依然可以保持高精度方位信息。
SEC295M 同时也具有优异的动态性能,保证了动态测量的高精度。
高性价比让SEC295M 非常适合高航向精度要求场合。
●手持设备●海洋勘测●水下导航●机械控制产品介绍●三轴陀螺三轴加速度计三轴磁力计●动态静态测量●偏置追踪算法消除漂移●高精度,低成本●宽温范围:-40℃~+85℃●小体积外形:L55×W37×H24(mm)●带硬磁、软磁及倾角补偿●航向精度2°电源电压5-12V DC工作电流30mA(40mA最大)工作温度-40℃~85℃存储温度-55℃~100℃罗盘航向参数航向精度2°(RMS,静态,罗盘工作模式)3°(RMS,动态,航姿工作模式)重复性0.1°罗盘倾斜参数俯仰精度2°(RMS,动态)0.5°(RMS,静态)横滚精度2°(RMS,动态)0.5°(RMS,静态)分辨力0.01°倾斜范围俯仰±90°;横滚±180°校准硬磁校准有软磁校准有物理特性尺寸L55x W37x H24(mm)重量80g输出形式RS232/485/TTL 接口接口特性启动延迟<3s 最大输出频率100次/sRS232通信速率2400到115200波特率环境抗振性能3000g分辨力:传感器在测量范围内能够检测和分辨出的被测量的最小变化值。
HMC5983电子罗盘
Advanced Information
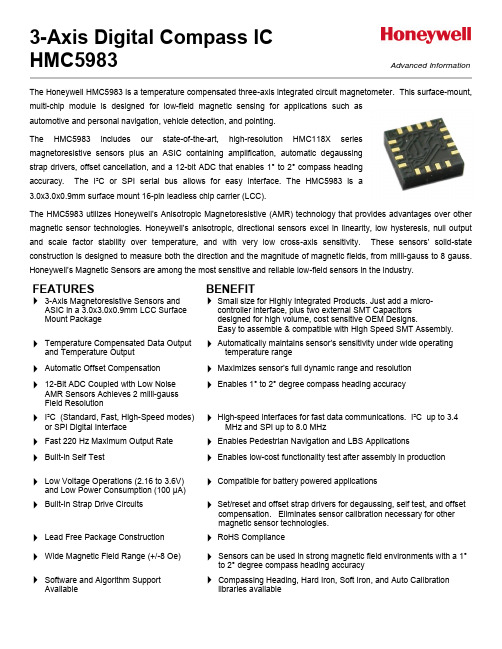
The Honeywell HMC5983 is a temperature compensated three-axis integrated circuit magnetometer. This surface-mount,
magnetoresistive sensors plus an ASIC containing amplification, automatic degaussing strap drivers, offset cancellation, and a 12-bit ADC that enables 1° to 2° compass heading accuracy. The I²C or SPI serial bus allows for easy interface. The HMC5983 is a
Lead Free Package Construction Wide Magnetic Field Range (+/-8 Oe) Software and Algorithm Support Available
RoHS Compliance
can be used in strong magnetic field environments with a 1° Sensors to 2° degree compass heading accuracy Heading, Hard Iron, Soft Iron, and Auto Calibration Compassing libraries available
0.1
±% FS ppm %FS/gauss Hz ms μs ms % hex
kHz
使用HMC5883L-3轴数字罗盘传感器计算航向角
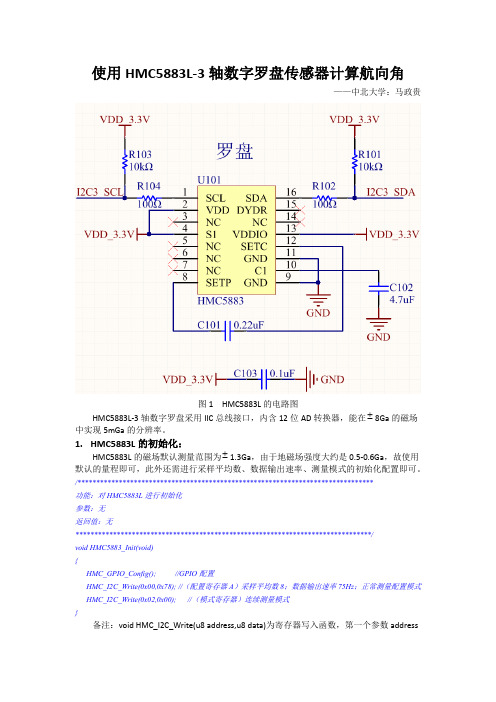
使用HMC5883L -3轴数字罗盘传感器计算航向角——中北大学:马政贵图1 HMC5883L 的电路图HMC5883L -3轴数字罗盘采用IIC 总线接口,内含12位AD 转换器,能在8Ga 的磁场中实现5mGa 的分辨率。
1. HMC5883L 的初始化:HMC5883L 的磁场默认测量范围为 1.3Ga ,由于地磁场强度大约是0.5-0.6Ga ,故使用默认的量程即可,此外还需进行采样平均数、数据输出速率、测量模式的初始化配置即可。
/******************************************************************************* 功能:对HMC5883L 进行初始化参数:无返回值:无*******************************************************************************/ void HMC5883_Init(void){HMC_GPIO_Config(); //GPIO 配置HMC_I2C_Write(0x00,0x78); //(配置寄存器A )采样平均数8;数据输出速率75Hz ;正常测量配置模式 HMC_I2C_Write(0x02,0x00); //(模式寄存器)连续测量模式}备注:void HMC_I2C_Write(u8 address,u8 data)为寄存器写入函数,第一个参数address ±±为要写入的寄存器地址,第二个参数data 为要写入寄存器的值。
2. HMC5883L 自测:HMC5883L -3轴数字罗盘内含自测模式。
HMC_I2C_Write(0x00,0x79); //(配置寄存器A )采样平均数8;数据输出速率75Hz ;正偏压自测模式 HMC_I2C_Write(0x02,0x01); //(模式寄存器)单一测量模式通过将配置寄存器A 的最低位(MS1和MS0)从00更改为01,然后再配置为单一测量模式,即可进入自测模式。
电子罗盘
功能 方位标定
方位置零 输出方式 设置地址号
含义 开始平面标定 停止平面标定 保存标定数据 设置零点方位 清除磁北修正
磁北修正 连续输出 单次输出
写地址
命令字 0xF5 0xF8 0xF7 0xA5 0xE5 0xE8 0xA0 0xA1 0xFF
数据帧 AA AA 04 01 F5 F0 AA AA 04 01 F8 FD AA AA 04 01 F7 F2 AA AA 04 01 A5 A0 AA AA 04 01 E5 E0 AA AA 04 01 E8 ED AA AA 04 01 A0 A5 AA AA 04 01 A1 A4 AA AA 04 01 FF 02 F8
±0.7 ±1 %
±1.5 ±2 %
±0.4
º
稳定性
测量温度 25℃,时间间隔 24 小时
±0.6
º
热零点漂移 温度范围:-40℃—80℃
*1
最大干扰磁场
±0.04 ±0.06 º/℃ 20 Gauss
数据更新率
输出方式为连续输出,LP3200 输出方式为连续输出,LP3201
3
Hz
4.9
Hz
波特率
11 罗盘与磁北偏角低位
12
校验
无符号数
前 11 字节的异或
HEX 格式数据解析举例:
例如:接收到数据帧 AA AA 0A 01 A0 00 F0 FF 80 04 9D BD;
AA AA 为数据帧帧头; 0A 为数据帧长度,不包括帧头,即 10; 01 为倾角的地址号; A0 为单次输出的命令字;
mm
直径:35 高:16
mm
*1:在该磁场环境下工作不会损坏内部的磁场检测传感器,对于正常工作范围小于±2 高 斯的产品,在 20 高斯磁场环境下不能正常反应磁场变化,如果必须要在这种条件下使用罗 盘,需要和工厂说明对产品进行特别处理。
三维电子罗盘HG

三维电子罗盘HG-3300一.产品特点1.罗盘通过三轴磁阻传感器测量平面地磁场,双轴倾角补偿。
2.高速高精度A/D转换,磁场测量精度100μGuass。
3.罗盘内置温度补偿,最大限度减少倾斜角和指向角的温度漂移。
4.罗盘内置微处理器计算传感器与磁北夹角,输出RS232格式数据帧。
可选RS485和RS422输出。
5.具有简单有效的用户标校指令。
6.具有指向零点修正功能。
7.外壳结构防水,无磁。
(可选不带外壳)8.工作温度范围-40℃到+85℃。
保存温度-55℃到+100℃。
二. 产品应用范围电子罗盘HG-3300可广泛应用于航空航海、通信雷达、微波定向、海上平台控制、天线安装固定、无人机及机器人自动控制、交通车辆检测。
三. 主要技术指标:俯仰和横滚输出:响应速度1-10次/秒(可调)输出范围±60°精度(俯仰范围±30°)±0.1°精度(俯仰范围±30°到±45°)±0.2°分辨率±0.01°重复性±0.03°航向输出:响应速度1-10次/秒(可调)测量精度±0.5°分辨率±0.2°重复性±0.4°其它指标:磁场测量范围0.1 Gauss 到 3 Gauss最大干扰磁场20 Gauss电源电压+12V DC电源电流60mA工作温度-40℃ 到 +85℃存储温度-55℃ 到 +100℃外壳尺寸铝外壳( 长100mm宽75mm高40mm)不带外壳:55*40mm极限工作指标:电源电压+7V到 +18V DC工作温度-50℃ 到 +85℃注:长期工作在极限条件下,会造成数据失准,或者造成产品永久性损坏。
四. HG-3300电子罗盘输出信号格式:罗盘输出RS-232格式数据,格式“9600,n,8,1”。
3轴数字罗盘IC HMC5883L介绍

3轴数字罗盘IC HMC5883L介绍3轴数字罗盘IC HMC5883L简介霍尼韦尔 HMC5883L 是一种表面贴装的高集成模块,并带有数字接口的弱磁传感器芯片,应用于低成本罗盘和磁场检测领域。
HMC5883L 包括最先进的高分辨率HMC118X 系列磁阻传感器,并附带霍尼韦尔专利的集成电路包括放大器、自动消磁驱动器、偏差校准、能使罗盘精度控制在1°~2°的12 位模数转换器.简易的I2C 系列总线接口。
HMC5883L 是采用无铅表面封装技术,带有16 引脚,尺寸为3.0X3.0X0.9mm。
HMC5883L 的所应用领域有手机、笔记本电脑、消费类电子、汽车导航系统和个人导航系统。
3轴数字罗盘IC HMC5883L特点1、三轴磁阻传感器和ASIC 都被封装在3.0×3.0×0.9mm LCC 表面装配中。
2、12-bit ADC 与低干扰AMR 传感器,能在±8 高斯的磁场中实现5 毫高斯分辨率。
3、内置自检功能。
4、低电压工作(2.16-3.6V) 和超低功耗(100uA)。
5、内置驱动电路。
6、I2C 数字接口。
7、无引线封装结构。
8、磁场范围广(+/-8Oe)。
9、有相应软件及算法支持。
10、最大输出频率可达160Hz。
3轴数字罗盘IC HMC5883L优点1、是体积小高集成产品。
只需添加一个微处理器接口,外加两个外部SMT 电容。
专为大批量、成本敏感的OEM 生产而设计,易于装配并与高速SMT 装配件兼容。
2、能让罗盘航向精度精确到1°~2°。
3、产品组装后能进行低成本功能性测试。
4、适用于电池供电的应用场合。
5、带置位/复位和偏置驱动器用于消磁、自测和偏移补偿。
6、适用于消费类电子设备应用中通用双线串行数据接口。
7、符合RoHS 标准。
8、传感器能在强磁场环境中罗盘航向精度达到1°~2°。
9、可获得罗盘航向、硬磁、软磁以及自动校准库。
HEC360全姿态三维电子罗盘
Ÿ 精度: 0.3°~0.5°(RMS) Ÿ 测量范围: 全姿态 Ÿ 宽温范围: -40℃~+85℃ Ÿ 低工作电流: 40mA
应用领域
Ÿ 小体积外形: L72 x W16 x H12 (mm) Ÿ 带硬磁、软磁及倾角补偿 Ÿ 标准 RS232/RS485/TTL 输出接口
Ÿ 卫星追踪 Ÿ 石油地质测井 Ÿ 光测距仪 Ÿ 无人飞行器
4
270
-5~+5
-30~-40
5
30
>+45
30~40
6
120
>+45
-30~-40
7
210
>+45
30~40
8
300
>+45
-30~-40
9
60
<-45
30~40
10
150
<-45
-30~-40
11
240
<-45
30~40
12
330
<-45
-30~-40
©2013-2014, 宁波麦思电子科技有限公司
0.1°(俯仰<65°) 0.2°(俯仰<80°) 0.5°(俯仰<86°)
0.01° 俯仰±90°; 横滚 360°
有 有 有 L72 x W16 x H12 (mm) 10 克 5针 <50 毫秒 50 次/秒 2400 到 19200 波特率 可选 可选 十六进制 直流+5V 40mA 30mA -40℃--+125℃ -40℃--+85℃ 3000g
©2013-2014, 宁波麦思电子科技有限公司
数字电子罗盘HMR3000的特性及应用

使用前面叙述的串口协议,外部的主机可以用下 面的指令直接操作 HMR3000。现把一些较重要输入指 令列在表 1 中。
char stop[]={'#','F','A','0','.','3','=','0','*','2','7','\15','\12','\0'};
char acq[]={'#','B','A','4','H','?','*','4','0','\15','\12','\0'};
len=strlen(acq);
LE=strlen(stop); outport(0x3fb,0x80);
/*串口初始化:波特率
19200,1位起始位*/
outport(0x3f9,0); outport(0x3f8,0x06); /*8位数据位,1位停
止位,无奇偶校验*/
outport(0x3fb,7);
outport(0x3f9,0); for(i=0;i<LE;i++)
陕西航天长城 C100电子罗盘 使用说明

C100电子罗盘使用说明C100电子罗盘是一种创新的独立产品,具有体积小、价格低、系统灵活性强、寻北精度高、启动速度快的特点,可满足全天候工作应用需求,可在-40º和+85º工作环境下应用,国外号称是世界上精度最高的电子罗盘。
它的航向精度能达到0.5度的范围内。
如何安装测试C100?尽管C100能够缓和补偿磁干扰,但是选择一个有最小磁干扰的位置是至关重要的。
尽可能的远离铁、钢、磁铁、发动机和其他磁物质的地方放置C100。
即使周围有这些磁介质,至少需要维持12英寸远的距离。
每个C100电子罗盘都提供六英寸的电缆线,KVH公司可选的电缆线可以为48英寸。
在传感器电缆尽可能短可以获得最小的噪音。
尽管C100能够在稳定的磁环境下补偿适中的偏差,但是它不能补偿改变的磁干扰。
记住带直流电的电线产生磁场,如果直流电改变,磁场大小也将改变!电池是另一个变化的干扰源。
每个安装都是不同的并且用户必须评估在所有可能的操作环境下的安装可行性。
C100的航向精度能达到0.5度,这是经过严格验证不容置疑的,最科学的测试方法同样至关重要。
我们建议的测试方法是:将C100电子罗盘安装在垂直竖起的铝(无磁性的其他材料)制杆上,进行航向精度测量(当然转动杆垂直于转动平台,尽量做到避免大的外界磁场干扰)。
这样做可以减小罗盘转动的半径,科学的提高测量精度。
这只是提供实验室的安装,对于具体情况必须灵活处理,例如:安装在车上时,C100应该做到将其安装在垂直于运动方向。
安装尺寸图连接C100引脚定义下面详细定义了封装的C100电子罗盘的电源和数据接口连接功能 信号 线色 串口 RXD,RS232 或者0到+5V数字输入 红黑TXD,RS232 或者0到+5V数字输出 蓝黑地,通用地 黑白 数字口 时钟,10KHz 0 到+5V时钟输出 蓝色数字,0到+5V 数字输出 橙黑滤波,0到+5V 滤波输入 绿黑 模拟输出 SIN,SINE 或者 模拟输出 橙色COS,COSINE 或者模拟输出 绿色REF,参考或者模拟输出 白黑 电压输入 +8到+18VDC 白色+18到+28VDC 红色地,通用地 黑色 空闲 绿白 空闲 红白 电缆保护连接到了铝制外壳如何校准C100?C100提供了三种校准方法:八点校准法、三点校准法和旋转校准法。
Honewell HMR3200 HMR330数字罗盘 说明书

特点:方向精度1˚ ,分辨率0.1˚重复精度0.5˚HMR3300具有± 60˚ 倾角(俯仰/侧滚)测量范围小尺寸,(25mm X 37mm X 10mm ),重量轻具有补偿硬磁干扰,铁磁物体干扰和离散磁场功能响应速度为15Hz使用温度范围-40˚ ~ +85˚C 6-15VDC 单电源供电。
概述:霍尼韦尔的HMR3200/HMR3300是用于导航和制导系统的电子罗盘解决方案模块。
霍尼韦尔的磁阻传感器被用于HMR3200/HMR3300以达到小尺寸,固态罗盘的可靠性和精度。
HMR3200/HMR3300,非常易于集成到使用ASCII 格式的UART 或SPI 接口的系统中。
HMR3300具有三轴磁场测量,并采用两轴加速度传感器作为倾角补偿,从而使倾角测量范围达到± 60˚ 。
HMR3200是两轴磁阻模块,在垂直和水平方向的性能被优化。
应用:定向和导航姿态参考卫星天线位置平台水平度GPS 集成系统激光侧距机单位度度度度度度度度度特征方向精度分辨率迟滞重复精度倾斜和俯仰精度分辨率磁滞重复性测试条件水平0-30度(只有HMR3300)± 30~60度(只有HMR3300)HMR3200HMR3300HMR3200HMR3300倾斜和俯仰范围0 ~ 30度± 30 ~ 60度最小值典型值1.01.53.00.10.10.20.10.2± 600.41.00.10.20.2最大值0.20.40.20.40.51.2北京华信昊通科技有限公司地址:北京市石景山区杨庄东路126号星宇大厦520 Tel:010-5162042951620428e-mail:139********************:///磁场范围范围分辨率电气输入电压电流数字接口UART 串行接口更新速率接头物理量尺寸重量环境(储存温度为-55至125℃)温度最大磁场强度未整定激活模式HMR3200激活模式HMR3300ASCII (1START ,8DATA ,1STOP ,无奇偶位)用户可选波特率CKE=0,CKP=0,Psuedo Master 连续/选通/平均HMR3200HMR3300内嵌8针模块(0.1″间距)电路板HMR3200HMR3300HMR3200HMR3300+/-20.11822--15825.4*36.8*1.17.257.5----202419200+85+70高斯微高斯VDC mA mA 波特HZmm 克˚ C ˚ C62400-40-20引脚结构引脚号码12345678引脚名称SCK RX/SDI TX/SDO CS CAL +5VDC GND UV描述SPI 模式串行时钟输出UART 接收数据/SPI 数据输入UART 发送数据/SPI 数据输出引脚选通SPI 模式校正输入可选的+5VDC 电源输入电源和信号未整定的电源输入(+6到+15VDC )模块尺寸约为37mmX25mm, 8个针。
TCM5技术手册
[Calibration Tab]
所有的罗盘都可以在一个可以控制的环境中工作的很好,这种环境指的是周围的磁场只有地 磁场。然而,在大多数实际应用中,一个电子罗盘模块将被安放在一个系统中----像安在具 有很大的本地磁场源的车辆中,磁场源有:磁性金属底盘、变压器铁芯、电流,以及电机的 永磁铁等等。 通过执行用户校准工作,可使 TCM5 分离出那些本地磁场异常的主要来源,并随后在测量 用于计算罗盘航向的地磁场时把它们的影响消除。当你执行用户校准工作时,TCM5 获得一 系列磁场测量值。它分析这些全部的磁场测量值,是为了识别出哪些是由地磁场产生的分量, 是所需要的;哪些是由本地环境所产生的分量,是要去掉的。 做这项工作的最终目的是为了使 TCM5 得到在其安装位置由主系统产生的静态三维磁场矢 量的精确测量值。随后在实时野外测量时加以去除,以得到地磁场矢量的合量。 TCM5 的三轴磁强计和三轴倾斜计系统配置使你的主要受益是在于它在全部可用倾斜范围 内、所有方向上对硬铁影响作补偿。我们要强调指出,为了精确地校准,TCM5 必须在当时 安装在主系统的位置上测量由主系统所产生的本地场矢量。因为 TCM5 的磁强计是捷联式 的,或对于主系统是固定的,当主系统的姿态改变时,这个本地磁场不会改变,允许 TCM5 在所有俯仰和翻滚方向中作精确地补偿。而对于常平架式的磁通门而言,是不能在不水平的 状态下提供校准的,因为它的磁强计是常平的,当姿态变化时,它就改变了相对于主系统的 位置,那时就会有一个与校准时测量的所不同的本地磁场畸变。
获得参数: 模式: Poll 模式:选择此模式,可作连续输出,时间选择 0 表示实时输出。 Push:采样模式,time 为采样时间间隔。
HoneywellHMR3000三轴数字罗盘规格书
HoneywellHMR3000三轴数字罗盘规格书电⼦罗盘模块按照NMEA格式,通过RS232/485串⼝提供航向输出(横滚、俯仰、偏航)采⽤Honeywell公司的固态磁阻传感器,具有快速的响应时间⾄20Hz,航向精度为0.5? ,分辨率为0.1? 。
快速响应时间⼩体积低功耗⾼精度宽的倾斜⾓度对铁磁物性⾦属进⾏补偿使⽤固态磁传感器提⾼了响应速度,和万向架固定式的磁通门传感器相⽐提⾼了数据更新速度。
仅为⼀块线路板,重量⼩于57克,体积为83x25x22mm,铝外壳封装。
功耗⼩于25mA,可长时间电池供电0.5? 航向精度,分辨率0.1? ,可适⽤于严格定向的应⽤场合。
倾斜⾓度为±40? ,适合于⼴泛的要求精确的应⽤通过对因环境中存在铁磁性⾦属⽽对地磁场造成的扭曲的补偿,提⾼精度。
h t t p://w ww.y or k i n st r u me n t.ce l l-HM R.h t m下表显⽰,9针插头引脚排列,电源可以为调制的5V ,或不调制6—15V ,只有#9针或#8针中的⼀个,可由给定连接⽅法连接。
见以下:接⼝信号描述通信HMR3000 ⽤简单的ASCII 字符与外部主控制器,通过 RS-232 或 RS-485 通讯。
ASCll 码的发送和接收,使⽤1个起始位,8个数据位(先是LSB,MSB 总为0) ,⽆奇偶位,和⼀个停⽌位,波特率可设置为1200,2400,4800,9600,19200或38400,HMR3000 对所有收到的带校验码的有效输⼊作反应。
罗盘输出HMR3000输出三种NMEA 标准格式(HDG,HDT 和XDR),三种专⽤格式(HPR,RCD 和CCD),及⼀个 ASCll 码航向输出,⽤于数据显⽰。
HDG,HDT 和HPR 是最通⽤格式。
$HCHDG 航向、偏差⾓、磁偏⾓$HCHDG, 85.5, 0.0, E, 0.0, E*77$HCHDT,航向、对(True)$HCHDT,271.1,T*2C$PTNTHPR,航向、俯仰和横滚$PTNTHPR,Heading,Heading Status,Pitch,Pitch Status,Roll,Roll Status*hh$PTNTHPR,85.9,N,-0.9,N,0.8,N*2C名称TxD/B RxD/A GND 6-15V 5VOper/Calib(2)Run/Stop(2)Ready/Sleep(2)Cont/Reset(2)⼊/出Out In In In In In InIn In引脚235981647描述RS-232 发送/ RS-485RS-232 接收 / RS-485电源/信号地未调理的电源电压输⼊调理的电源电压输⼊Operate/Calibrate (3) input (open=Operate)Run/Stop (3) input (open=Run)Ready/Sleep (3) input(open=Ready)Continue/Reset (3) input (open=Continue)(典型值)---6-155 ± 5%0-50-50-50-5(最⼩值)(1)-18-1800-20-20-20-20单位Vdc VdcVdc Vdc Vdc Vdc Vdc Vdc(最⼤值)(1)1818307.520202014(1) 绝对最⼤值(2) 沉电流:200µA (典型值), 400mA(最⼤值)(3) 开路输⼊ =⾼电平h tt p://w w w.y ork i n s t ru m e nt .c o m/H on e y w e l l -H M R.h t mHMR3000 连线图——计算机RS232 到 HMR3000订货指南HMR3000-Demo-232*.....RS232HMR3000-D00-232..........RS232.........NoneHMR3000-D21-232..........RS232.........Extended Base HMR3000-D00-485..........RS485.........None HMR3000-D21-485..........RS485.........Extended Base*Development Kit includes one module in alu minum enclosure, cablingwith power supply, demonstration software for PC running Windows ?and User ’s Manual.ht t p://w ww .y o rk i n s t ru m en t .c o m /Ho n e yw e l l -H M R.h t m数值<0.5?<1.5?± 0.3?0.1?degrees/mils ±40?±0.4?±0.6?±0.2?0.1?degree/mils ±1.0 Gauss (最⼤值)1 mGauss 5.0 Vdc 调理电压6~15Vdc 未调理电压35 mA@6 Vdc13 mA 2.0 mARS-232RS-4851200 to 38400 bps NMEA 0183连续滤波0.75 oz (22g)3.25 oz (92g)1.2 x 2.95 x 0.7601.5 x 4.2 x 0.88-20 to 70?C -35 to 100?C 30 英⼨⾼落下20~2000Hz Random 2 hrs/axisIPC6012IPC610航向⾓俯仰和横滚磁场电⽓接⼝物理环境制造指标1. 航向精度是假设地球磁体只有硬铁⼲扰,已通过标定进⾏补偿2. 标定值3. 由设计参数保证4. 典型5. 迟到或超过*器件⽅向⾓不超过75?在⼯作或贮存时——可引起短暂的精度损失。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字电子罗盘型号:XL49-ZCC212N-TTL-TY1
一.概述
电子罗盘是基于X,Y
两个方向的磁阻传感器测出地球磁场的水平分量,从而得出方位
角。
本产品无活动件,耐振动,并具有硬铁校准功能,可以克服
周围硬铁磁场的干扰。
工作电压:+5V,功耗低,体积小。
以TTL 方式与上位机进行通信,.其输出波特率9600bp/s,为查询输出
方式。
二.产品特点
体积小;
重量轻;
功耗低;
耐振动;三.产品应用
手持式仪器仪表;
机器人导航、定位;
航行系统;
船用自动;
天线定位;
车载GPS 导航;
航模定四.技术参数表:
三.产品应用
手持式仪器仪表;
机器人导航、定位;
航行系统;
船用自动舵;
天线定位;
车载GPS 导航;
航模定向。
四.技术参数表:
测量范围;0°\u65374X 360° 分辨率:1
精度:<5
响应频率:5
重复性:<1
电压:5+(-)0.1V
工作电流:<30
工作温度:-40 ~+ 85
外形尺寸:22 * 25.4 * 11.5
五.通讯协议:(数据输出为ASC11 码):
1、输出协议:
每组方位数据共11 个字节,内容如下:
Byte1:$[0x24]
Byte2:H[0x48]
Byte3:,[0x2C]
Byte4:角度值的百位
Byte5:角度值的十位
Byte6:角度值的个位
Byte7:*[0x2A]
Byte8:校验第一位
Byte9:校验第二位
Byte10:回车[0x0d]
Byte11:换行[0x0a]
如: $H,211*30
注: 单字节传送每帧的格式为:1 位起始位,8 位数据位,1 位结束位2、用户指令:
版次:A\1
1)*P[0x2A 0x50] ——单次输出。
每发送一次,系统将输出一组方位数据。
2)p[0x70] ——标定。
罗盘将循环输出studing…,同时进行磁场数据采集。
3)r[0x72] ——结束标定。
说明:
1)系统在上电后首先输出软件版本:ZCcTY 1.05a,然后进入等待状态。
2)命令字区分大小写。
3、校验位算法:用测量值的百位.十位.个位相异或,然后再与十六进制的32H 相异或,
得出的值的高四位为校验第一位,低四位为校验第二位,并用ASC11 码表示,即:
Byte4∧Byte5∧Byte6∧0x32
例:$
211 是角度值,30 是校验值
2∧1=3, 3∧1=2, 2∧0x32 = 0x30; 校验的第一位为:0x33. 校验的第二位为:0x30.
几点说明:
版次:A\1
⑴标定:也叫硬铁补偿,所有的电子罗盘在使用前都要进行标定。
一旦罗盘周围硬铁环境发
生变化,会使罗盘周围固有的磁场环境也发生变化。
此时罗盘计算输出的角度信息将不
准确,为消除周围固有磁场变化带来的影响,就要对罗盘进行标定。
⑵标定的方法:
①把转台的水平调整好;
②通过5 脚插头电缆线和RS?232 串口插头BD-9 与计算机相连,
如上面接线图所示
③测精度:
A.接通计算机:
设定波特率( 如果波特率不对,则输出乱码)
B.标定:
a.先发送标定命令p,然后,将罗盘在水平方向上,均匀缓慢地旋转一至二周,旋转一周的时
间应该不少于1 分钟,一般1~2 分钟旋转一周。
(可以绕自身的中轴旋转,也可以绕平面内一
点作圆周运动),以保证计算机能及时准确地采集到X.Y 两个方向上的最大值与最小值,从而算
出标定值。
b.发送r 命令结束标定。
C.调零:
a.发送单步命令*P,在定时发送栏内挑勾,这时计算机显示屏上便有数字定时连续输出
b.转动转台,同时,观看计算机屏幕,到显示为零为止。
D. 测精度:每隔30 度测一次,转360 度,测出全部数值。
算各点差值,并算出全程均方根值。
④测重复性:随意找一个角度值读数,然后将转台转一圈回到同一角度值,算二次的读数差值。