基于51单片机的两相四线步进电机控制系统(汇编版)
(毕业设计)基于单片机的步进电机控制系统(汇编及C语言程序各一个)

基于单片机的步进电机控制系统设计前言步进电机是一种进行精确步进运动的机电执行元件,它广泛应用于工业机械的数字控制,为使系统的可靠性、通用性、可维护性以及性价比最优,根据控制系统功能要求及步进电机应用环境,确定了设计系统硬件和软件的功能划分,从而实现了基于8051单片机的四相步进电机的开环控制系统。
控制系统通过单片机存储器、I/O接口、中断、键盘、LED 显示器的扩展、步进电机的环形分频器、驱动及保护电路、人机接口电路、中断系统及复位电路、单电压驱动电路等的设计,实现了四相步进电机的正反转,急停等功能。
为实现单片机控制步进电机系统在数控机床上的应用,系统设计了两个外部中断,以实现步进电机在某段时间内的反复正反转功能,也即数控机床的刀架自动进给运动,随着单片机技术的不断发展,单片机在日用电子产品中的应用越来越广泛,自六十年代初期以来,步进电机的应用得到很大的提高。
人们用它来驱动时钟和其他采用指针的仪器,打印机、绘图仪,磁盘光盘驱动器、各种自动控制阀、各种工具,还有机器人等机械装置。
此外作为执行元件,步进电机是机电一体化的关键产品之一,被广泛应用在各种自动化控制系统中,随着微电子和计算机技术的发展,它的需要量与日俱增,在各个国民经济领域都有应用。
步进电机是机电数字控制系统中常用的执行元件,由于其精度高、体积小、控制方便灵活,因此在智能仪表和位置控制中得到了广泛的应用,大规模集成电路的发展以及单片机技术的迅速普及,为设计功能强,价格低的步进电机控制驱动器提供了先进的技术和充足的资源。
1.步进电机原理及硬件和软件设计1.1步进电机原理及控制技术由于步进电机是一种将电脉冲信号转换成直线或角位移的执行元件,它不能直接接到交直流电源上,而必须使用专业设备一步进电机控制驱动器,典型步进电机控制系统如图1所示:控制器可以发出脉冲频率从几赫兹到几千赫兹可以连续变化的脉冲信号,它为环形分配器提供脉冲序列,环形分配器的主要功能是把来自控制环节的脉冲序列按一定的规律分配后,经过功率放大器的放大加到步进电机驱动电源的各项输入端,以驱动步进电机的转动,环形分配器主要有两大类:一类是用计算机软件设计的方法实现环形分配器要求的功能,通常称软环形分配器。
基于51单片机的步进电机控制
电)四拍(A-B-C-D-A。。。),双(双相绕组通电)四拍(AB-BC- CD-DA-AB-。。。), 八拍(A-AB-B-BC-C-CD-D-DA-A。。。) 3、系统电路图
(1)接电源:VCC(PIN40)、GND(PIN20)。加接退耦电容 0.1uF (2)接晶体:X1(PIN18)、X2(PIN19)。注意标出晶体频率(选用 12MHz), 还有辅助电容 20pF (3)接复位:RES(PIN9)。接上电复位电路,以及手动复位电路,分析 复位工作原理 4、 接配置:EA(PIN31) (1)四个 8 位通用 I/O 端口,对应引脚 P0、P1、P2 和 P3; (2)两个 16 位定时计数器;(TMOD,TCON,TL0,TH0,TL1,TH1) (3)一个串行通信接口;(SCON,SBUF) (4)一个中断控制器;(IE,IP) 根据以上的方案比较与论证确定总体方案,确定硬件原理图。原理图如下:
1.3 步进电机的特点
1.精度高 一般的步进电机的精度为步进角的 3-5%,且不累积。可在宽 广的频率范围内通过改变脉冲频率来实现调速,快速起停、正反 转控制及制动 等,这是步进电动机最突出的优点
2.过载性好——其转速不受负载大小的影响,不像普通电机,当负载加大 时就会出现速度下降的情况,所以步进电机使用在对速度和位置都有严格要求的 场合;
一、步进电机与驱动电路
1.1 什么是步进电机
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱 动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度 (及步进角)。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目 的;同时也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调 速的目的。
51单片机控制四相步进电机解析
51单片机控制四相步进电机2009年07月21日星期二 12:4451单片机控制四相步进电机2009-03-01 18:53接触单片机快两年了,不过只是非常业余的兴趣,实践却不多,到现在还算是个初学者吧。
这几天给自己的任务就是搞定步进电机的单片机控制。
以前曾看过有关步进电机原理和控制的资料,毕竟自己没有做过,对其具体原理还不是很清楚。
今天从淘宝网买了一个EPSON的UMX-1型步进电机,此步进电机为双极性四相,接线共有六根,外形如下图所示:详细内容:/31907887_d.html拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为360/(4×5)=18度。
地线与四线接触的顺序相反,电机的转向也相反。
如果用单片机来控制此步进电机,则只需分别依次给四线一定时间的脉冲电流,电机便可连续转动起来。
通过改变脉冲电流的时间间隔,就可以实现对转速的控制;通过改变给四线脉冲电流的顺序,则可实现对转向的控制。
所以,设计了如下电路图:C51程序代码为:代码一#include <AT89X51.h>static unsigned int count;static unsigned int endcount;void delay();void main(void){count = 0;P1_0 = 0;P1_1 = 0;P1_2 = 0;P1_3 = 0;EA = 1; //允许CPU中断TMOD = 0x11; //设定时器0和1为16位模式1ET0 = 1; //定时器0中断允许TH0 = 0xFC;TL0 = 0x18; //设定时每隔1ms中断一次TR0 = 1; //开始计数startrun:P1_3 = 0;P1_0 = 1;delay();P1_0 = 0;P1_1 = 1;delay();P1_1 = 0;P1_2 = 1;delay();P1_2 = 0;P1_3 = 1;delay();goto startrun;}//定时器0中断处理void timeint(void) interrupt 1 {TH0=0xFC;TL0=0x18; //设定时每隔1ms中断一次count++;}void delay(){endcount=2;count=0;do{}while(count<endcount);}将上面的程序编译,用ISP下载线下载至单片机运行,步进电机便转动起来了,初步告捷!不过,上面的程序还只是实现了步进电机的初步控制,速度和方向的控制还不够灵活,另外,由于没有利用步进电机内线圈之间的“中间状态”,步进电机的步进角度为18度。
基于51单片机的步进电机控制系统
内燃机与配件0引言步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,在数控机床、喷绘机、刻字机以及医疗设备中有着重要作用。
我们设计了基于51单片机的步进电机控制系统,控制步进电机的正转、反转和停止,通过按键调整步进电机的转动速度,并通过LCD 显示屏显示当前的电机转动状态(包括转动方向、转动速度和转动圈数),同时通过串口完成与上位机的通讯功能。
1步进电机的启动原理步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。
通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
当某相定子励磁后(给定子绕组通电,会产生磁场),它吸引转子转动,转子的齿与该相定子磁极上的齿对齐,转子转动一个角度,换一相得电时,转子又转动一个角度,如此每相不停地轮流通电,转子不停地转动。
三相单三拍,得电顺序是A-B-C-A ,电机逆时针转动。
三相单三拍,得电顺序是A-C-B-A ,电机顺时针转动。
电机运行的方向和通电的相序有关,改变通电的相序,电机的运行方向也就改变。
电机的转速和相序切换的频率有关,切换得越快,电机转动得越快。
电机每拍转动的角度,称步距角θ。
步距角和电机的结构有关。
其中m 为定子绕组的相数。
z 为转子的齿数。
k 为通电方式,m 相m 拍时,k=1,m 相2m 拍时,k=2。
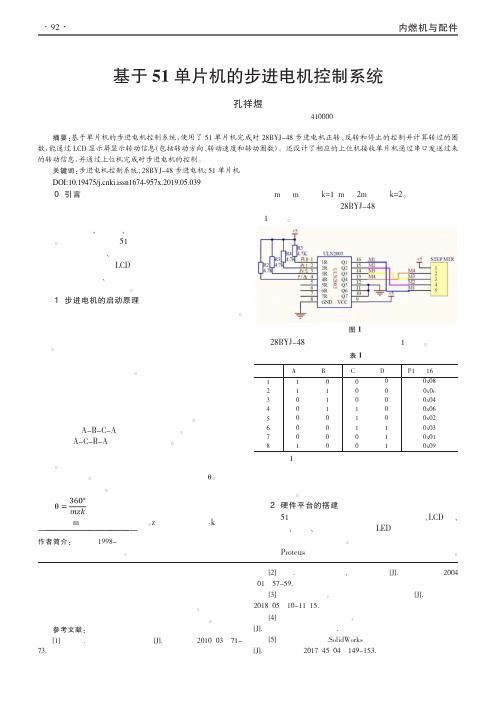
本次实验使用的是28BYJ -48步进电机,其原理图如图1所示。
图128BYJ-48步进电机的励磁顺序如表1所示。
A 相B 相C 相D 相P1口(16进制)12345678110000010111000000011100000001110x080x0c 0x040x060x020x030x010x09表1由表1可知,按照步进电机的励磁顺序,通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
基于51单片机的步进电机控制-设计报告(说明书)及源程序

步数
Q1
Q2
Q3
Q4
1
1
0
1
0
2
1
0
0
1
3
0
1
0
1
4
0
1
1
0
5
1
0
1
0
表1
二
2.
该系统中只运用到三个控制按钮,即 “正反”,“换挡”,“启停”,由于按钮较少,所以采用独立键电路,这种按键电路的按键结构相对行列式按键电路更简单,更使人易懂。
单片机的晶振为12MHZ;
(3)、系统电路图:
南京XX大学
指导老师:张X
课 程 设 计
基于51单片机的步进电机控制
机械电子工程学院
测控技术与仪器
XXXXX
Xxx
2012年1年4日
步进电机控制系统
[摘要]本课程设计的内容是利用51单片机,达到控制步进电机的启动、停止、正转、反转、两档速度和状态显示的目的,使步进电机控制更加灵活。步进电机驱动芯片采用ULN2803,ULN2803具有大电流、高电压,外电路简单等优点。利用四位数码管增设电机状态显示功能,各项数据更直观。实测结果表明,该控制系统达到了设计的要求。
2.
如图2.31,采用LED数码管动态显示数据与个项参数,方法简单,容易控制,成本低。
设计如下图
图2.31
2.4驱动电路设计
驱动电路可分为:三极管直接驱动(图3),采用斩波恒流驱动方式(图2.41)和芯片驱动电路等。驱动电路的性能直接关系到步进电机走步的准确与稳定。本电路采用驱动芯片ULN2803。ULN2803是一种大电流高电压型器件,外电路简单(图2.42)。
基于51单片机的步进电机控制

目录第1章总体设计方案 (1)1.1设计原理 (1)1.2设计思路 (1)1.3实验环境 (2)第2章详细设计方案 (3)2.1硬件电路设计 (3)2.2主程序设计 (4)2.3功能模块的设计与实现 (5)第3章结果测试及分析 (8)3.1结果测试 (8)3.2结果分析 (8)参考文献 (9)附录A (10)附录B(电路原理图) (15)附录C (元件列表) (16)第1章总体设计方案1.1 设计原理根据课程设计任务书的内容与要求,要实现步进电机的工作过程,步进电机是一种将电脉冲转换成相应角位移或线位移的电磁机械装置,也是一种能把输出位移增量和输入数字脉冲对应的驱动器件。
首先要给步进电机送入脉冲信号来启动,然后在已经设定好的步进电机的正反转及三种节拍工作方式中切换,步进电机的三种节拍工作方式分别为单四拍、双四拍、单双八拍。
步进电机的驱动需要时钟脉冲信号,改变单片机输出脉冲信号来实现的。
改变各脉冲的先后顺序,可以改变电机的旋转方向和工作方式。
步进电机工作方式的转换则通过键盘控制,可以进行启动、停止、正转、反转及三种节拍工作方式的选择。
键盘的控制是在程序中已经给给每个键设置相应的功能,扫描键盘判断是否有键按下,若有,则执行与之对应的功能;若没有键按下,则保持正在运行的状态不变。
1.2 设计思路采用C语言程序设计的方法结合硬件电路设计方法,利用Lab6000实验箱上已有芯片来实现步进电机的工作(包括正转、反转、单四拍、双四拍、单双八拍的节拍工作方式)。
1)提出方案首先,实现步进电机的启动与停止;其次,实现步进电机的正反转;再次,实现在正转时可选择三种节拍工作方式;最后,实现在反转时可选择三种节拍工作方式。
2)方案论证P1口接步进电机的A~D口,键盘接通片选信号,扫描键盘,由于本程序设定固定按键为功能键,所以扫描键盘时,将使用到的按键的相应列扫描码设置为低电平,如果有键按下,74LS374输出的低电平经过按键被接到74LS245的端口上,这样从74LS245读回的数据就会有低位,根据74LS374输出的列信号和74LS245读回的行信号,就可以判断哪个键被按下。
基于51单片机的步进电机控制系统设计

基于51单片机的步进电机控制系统设计步进电机是一种特殊的直流电动机,具有定角度、定位置、高精度等特点,在许多领域得到广泛应用,如机械装置、仪器设备、医疗设备等。
本文将基于51单片机设计一个步进电机控制系统,主要包括硬件设计和软件设计两部分。
一、硬件设计步进电机控制系统的硬件设计主要包括51单片机、外部电源、步进电机驱动模块、以及其他辅助电路。
1.51单片机选择由于步进电机控制需要执行复杂的算法和时序控制,所以需要一个性能较高的单片机。
本设计选择51单片机作为主控芯片,因为51单片机具有丰富的外设接口、强大的计算能力和丰富的资源。
2.外部电源步进电机需要较高的电流供给,因此外部电源选择稳定的直流电源,能够提供足够的电流供电。
电源电压和电流的大小需要根据具体的步进电机来确定。
3.步进电机驱动模块步进电机驱动模块是连接步进电机和51单片机的关键部分,它负责将51单片机输出的脉冲信号转化为对步进电机的驱动信号,控制步进电机准确转动。
常用的步进电机驱动芯片有L297、ULN2003等。
4.其他辅助电路为了保证步进电机控制系统的稳定运行,还需要一些辅助电路,如限流电路、电源滤波电路、保护电路等。
这些电路的设计需要根据具体的应用来确定。
二、软件设计1.系统初始化系统初始化主要包括对51单片机进行外部中断、定时器、串口和IO 口等初始化设置。
根据实际需求还可以进行其他模块的初始化设置。
2.步进电机驱动程序步进电机的驱动程序主要通过脉冲信号来控制电机的转动。
脉冲信号的频率和脉冲宽度决定了电机的转速和运行方向。
脉冲信号可以通过定时器产生,也可以通过外部中断产生。
3.运动控制算法步进电机的运动控制可以采用开环控制或闭环控制。
开环控制简单,但无法保证运动的准确性和稳定性;闭环控制通过对电机转动的反馈信号进行处理来调整脉冲信号的生成,从而实现精确的运动控制。
4.其他功能设计根据具体的应用需求,可以加入其他功能设计,如速度控制、位置控制、加速度控制等。
基于51单片机的步进电机控制系统设计与实现

步进电机工作原理
步进电机是一种基于磁场的控制系统,工作原理是当电流通过定子绕组时,会 产生一个磁场,该磁场会吸引转子铁芯到相应的位置,从而产生一定的角位移。 步进电机的角位移量与输入的脉冲数量成正比,因此,通过控制输入的脉冲数 量和频率,可以实现精确的角位移和速度控制。同时,步进电机具有较高的分 辨率和灵敏度,可以满足各种高精度应用场景的需求。
二、系统设计
1、硬件设计
本系统主要包括51单片机、步进电机、驱动器、按键和LED显示等部分。其中, 51单片机负责接收按键输入并控制步进电机的运动;步进电机用于驱动负载运 动;驱动器负责将51单片机的输出信号放大,以驱动步进电机。LED显示用于 显示当前步进电机的状态。
2、软件设计
软件部分主要包括按键处理、步进电机控制和LED显示等模块。按键处理模块 负责接收用户输入,并根据输入控制步进电机的运动;步进电机控制模块根据 按键输入和当前步进电机的状态,计算出步进电机下一步的运动状态;LED显 示模块则负责实时更新LED显示。
三、系统实现
1、按键输入的实现
为了实现按键输入,我们需要在主程序中定义按键处理函数。当按键被按下时, 函数将读取按键的值,并将其存储在全局变量中。这样,主程序可以根据按键 的值来控制步进电机的转动。
2、显示输出的实现
为了实现显示输出,我们需要使用单片机的输出口来控制显示模块的输入。在 中断服务程序中,我们根据设定的值来更新显示模块的输出,以反映步进电机 的实时转动状态。
基于单片机的步进电机控制系统需要硬件部分主要包括单片机、步进电机、驱 动器、按键和显示模块等。其中,单片机作为系统的核心,负责处理按键输入、 控制步进电机转动以及显示输出等功能。步进电机选用四相八拍步进电机,驱 动器选择适合该电机的驱动器,按键用于输入设定值,显示模块用于显示当前 步进电机的转动状态。
基于51单片机的步进电机控制系统-单片机课程设计报告
微机原理与接口技术课程设计报告基于51单片机的步进电机控制系统学号姓名班级 2011级电子2班华侨大学电子工程系摘要步进电机是将电脉冲信号变换成角位移或直线位移的执行部件。
步进电机可以直接用数字信号驱动,使用非常方便。
步进电动机的角位移量和输入脉冲的个数严格成正比,在时间上与输入脉冲同步,因此只要控制输入脉冲的数量、频率及电动机绕组通电的相序,便可获得所需的转角、转速及转动方向。
在没有脉冲输入时,在绕组电源的激励下气隙磁场能使转子保持原有位置处于定位状态。
因此非常适合于单片机控制。
它的运行速度和步距不受电源电压波动及负载的影响, 因而被广泛应用于数模转换、速度控制和位置控制系统。
本课程设计以STC89C52单片机作为微控制器,使用混合式步进电机驱动芯片ULN2003AN进行驱动,实现了对步进电机运行状态的简单控制,并将其运行状态用LCD1602液晶显示。
本次设计能实现的功能有电机运行、停止,设置运行圈数,调节转速,电机正反转,点动等。
关键词:STC89C52单片机,28BYJ-48步进电机,ULN2003AN驱动芯片,LCD1602显示,电机控制,点动第一章总体设计方案本次课程设计本课程设计以STC89C52单片机作为微控制器,使用混合式步进电机驱动芯片ULN2003AN进行驱动,实现了对步进电机运行状态的简单控制,并将其运行状态用LCD1602液晶显示。
本次设计能实现的功能有电机运行、停止,设置运行圈数,调节转速,电机正反转,点动等。
系统流程图如下:第二章硬件原理一、STC89c52单片机2.1、STC89c52芯片简介STC89C52是一个低功耗,高性能CMOS?8位单片机,片内含8k?Bytes?ISP(In-system?programmable)的可反复擦写1000次的Flash只读程序存储器,器件采用ATMEL公司的高密度、非易失性存储技术制造,兼容标准MCS-51指令系统及STC89C52引脚结构,芯片内集成了通用8位中央处理器和ISP?Flash存储单元,功能强大的微型计算机的STC89C52可为许多嵌入式控制应用系统提供高性价比的解决方案。
用51单片机控制两相四线步进电机

用51单片机控制两相四线步进电机最近学习步进电机的驱动原理,照着教材自己实践了一下用ULN2003驱动28BYJ-48两相5线步进电机,可以正常转动。
手头有一个旧光驱,拆开发现里面有三个电机,其中有一个控制激光头寻迹的两相四线步进电机,我就用51的单片机让它也转起来。
一开始照葫芦画瓢用ULN2003驱动,结果发现无论如何也不行。
原来ULN2003基本没输出电流,只能驱动有公共端的两相五线、两相六线步进电机,不能驱动2相4线步进电机。
然后改用L293D驱动,可以转动。
通过按钮控制正反转时发现,按键释放后,电机迅速发热,烫手。
用万用表测量,发现电机A,A-或B,B-直接存在电位差!应该是按键释放时,IN1-IN4没有归零。
找到问题,就容易解决了。
修改程序,可以完美运行,键1按下正转,释放停下,键2按下反转,释放停下。
IN1-IN4分别接P1口的低四位。
工作方式选用8拍。
A 1 1 0 0 0 0 0 1A- 0 0 0 1 1 1 0 0B 0 1 1 1 0 0 0 0B- 0 0 0 0 0 1 1 1附上源程序,仅供参考。
#include#define uint unsigned int#define uchar unsigned charsbit K3=P2^5;sbit K4=P2^4;//k3正转。
k4反转。
释放停止uchar code step_table[]={0x8,0xa,0x2,0x6,0x4,0x5,0x1,0x9};void delay(unsigned int m){unsigned int i,j;for(i=m;i>0;i--)for(j=110;j>0;j--);}void xp()//x轴正转{while(!K3){uint i;for(i=0;i<8;i++){P1=step_table[ i];delay(10);}}P1=0;//按键释放时,反转P1停在table某处,导致电机有电压从而使电机发热,需要归零。
基于51单片机的步进电机控制系统单片机课程设计报告

微机原理与接口技术课程设计报告基于51单片机的步进电机控制系统毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
毕业设计-基于C51单片机的步进电机控制系统设计

摘要本设计中首先介绍了步进电机的工作原理、控制特点和运行状态,然后给出了步进电机的单片机控制系统的总体设计方案。
在这个控制系统中,单片机选用AT89C51,其作为控制核心,担负着产生脉冲,发送、接受控制命令等任务;脉冲分配采用硬件方法,由8713接收到单片机的控制信号后产生相应的控制脉冲,避免了软件法在不停地产生脉冲时占用的时间;采用单电压驱动的方法驱动电机带动负载运行;利用键盘、显示专用芯片8279能够以较简单的硬件电路和较少的软件开销实现微型机与键盘和LED显示器接口。
本设计最后详细介绍了硬件部分和软件部分的实现方法。
关键词:单片机;步进电机;速度控制;ZLG7290;显示器AbstractThe design introduces the working principle of stepper motor, control features and operations, and then gives the stepper motor microcontroller control system design programs. In this control system, the SCM selecting AT89C51, the control center of the shoulder produces pulses, sending, receiving control commands and other tasks; pulse distribution method using hardware from the 8713 chip control signals received resulting from the corresponding control pulse, to avoid software method to generate pulses in constant time occupied; adopt a single voltage-driven approach drive motor to drive the load operation; use of keyboard, display 8279 can be dedicated to simple hardware and less software overhead to achieve keyboard and LED display interface. Finally introduce the hardware and software implementation methods in detail.Key words: SCM; stepper motor; speed control;ZLG7290;display;目录摘要 (I)Abstract .................................................... I I 第一章绪论. (1)1.1步进电机概述 (1)1.2课题研究的主要内容 (2)1.2.1研究内容 (2)1.2.2论文安排 (2)第二章步进电机控制系统设计方案 (3)2.1步进电机的系统 (3)2.2步进电机的失步现象 (5)2.3步进电机控制系统的组成 (6)2.4系统的控制过程 (7)第三章步进电机控制系统硬件部分 (9)3.1硬件电路图 (9)3.2采用51系列单片机AT89C51作为控制器 (10)3.2.1 AT89C51的主要性能 (10)3.2.2 AT89C51引脚功能说明 (10)3.3步进电机的驱动电路 (15)3.4 LED显示电路 (16)3.4.1 LED显示器的结构原理 (16)3.4.2 LED显示接口 (18)3.5可编程键盘/显示控制器ZLG7290电路工作原理 (19)3.5.1 ZLG7290概述 (19)3.5.2管脚、引线与功能 (21)3.5.3 ZLG7290键盘、显示接口电路设计 (24)3.6脉冲分配 (26)第四章步进电机控制系统软件部分 (30)4.1定时器中断服务 (30)4.1.1定时器初值 (30)4.1.2定时器中断服务子程序 (31)4.2 速度控制 (31)第五章总结 (35)致谢 (36)参考文献 (37)附录 (38)第一章绪论本章将简要介绍步进电机的发展过程、步进电机在日常生活中的广泛应用、步进电机作为数字控制电动机的主要特点以及本次研究的主要内容和论文安排。
基于51单片机控制步进电机

单片机原理及系统课程设计1 引言步进电机又称为脉冲电动机或阶跃电动机,它是基于最基本的电磁感应作用,将电脉冲信号转变为角位移或线位移的开环控制元件。
单片机控制的步进电机广泛地应用于工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,大型望远镜,卫星天线定位系统等等。
随着经济的发展,技术的进步和电子技术的发展,步进电机的应用领域更加广阔,同时也对步进电机的运行性能提出了更高的要求。
步进电机的原始模型起源于1830年至1860年,1870年前后开始以控制为目的的尝试,应用于氩弧灯的电极输送机构中,这被认为最早的步进电机。
1950年后期晶体管的发明也逐渐应用在步进电机上,对于数字化的控制变得更为容易。
到20世纪60年代后期,在步进电机本体方面随着永磁材料的发展,各种实用性步进电机应运而生。
步进电机往后经过不断改良,使得今日步进电机已广泛运用在需要高定位精度、高分解能、高响应性、信赖性等灵活控制性高的机械系统中。
在生产过程中要求自动化、省人力、效率高的机器中,我们很容易发现步进电机的踪迹,尤其以重视速度、位置控制、需要精确操作各项指令动作的灵活控制性场合步进电机用得最多。
2 设计方案与原理4.1 设计方案设计一个51单片机四相步进电机控制系统要求系统具有如下功能:(1)由I/O口产生的时序方波作为电机控制信号;(2)信号经过驱动芯片驱动电机的运转;(3)电机的状态通过键盘控制,包括正转,反转,加速,减速,停止和单步运行。
4.2 设计原理步进电机实际上是一个数字\角度转换器,也是一个串行的数\模转换器。
步进电机的基本控制包括启停控制、转向控制、速度控制、换向控制4个方面。
从结构上看,步进电机分为三相、四相、五相等类型,本次设计的是四相电机。
四相步进电机的工作方式有单四拍、双四拍和单双八拍三种。
在本次设计中,我们使用的是四相单八拍的工作方式。
通过P1口给A,B,C,D四相依次输出高电平即可实现步进电机的旋转,通过控制两次输出的间隔,即可实现对步进电机的速度控制。
基于51单片机的步进电机控制系统单片机课程设计报告
微机原理与接口技术课程设计报告基于51单片机的步进电机控制系统毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于51单片机的步进电机控制系统设计

基于51单片机的步进电机控制系统设计中文摘要步进电机是一种受脉冲信号控制,并且能将脉冲信号转化为相应的角位移或者线位移的数字电动机。
由于步进电机具有步距误差不积累、运行可靠、结构简单、惯性小、成本低等优点,因此,被广泛使用于计算机外围电路、自动化控制装置以及其他的数字控制装置中,如打印机、钟表、数模转换设备等装置中。
随着科学技术的快速发展,相应的控制系统也产生了很多种类,步进电机的身影在众多领域中可以看到。
其中采用单片机作为控制核心的控制系统,由于其电路简单、成本低、可靠性强等优点,满足众多领域的需求,得到了大量的运用。
因此,研究基于单片机的步进电机控制系统,具有重要的现实意义。
本设计研究的是基于51单片机对步进电机的控制系统。
通过单片机的I/O端口输出时序方波作为控制信号,信号经过芯片ULN2003驱动芯片驱动步进电机进行不同的指令进行工作。
根据不同的需要,通过按键电路来控制步进电机的启停、正反转和加减速等功能,并在数码管上实时显示步进电机的工作状态。
本文给出了电路各个模块的电路图,并用Proteus的ISIS软件对控制系统的各个功能进行了仿真,并给出了相应的仿真结果图像。
关键词:单片机;步进电机;电机驱动;控制系统AbstractStepper motor controlled by a pulse signal, and a pulse signal can be converted to the corresponding angular displacement or linear displacement of the digital motor. As the stepper motor has a step error does not accumulate, reliable, simple structure, small inertia, low cost, and therefore, are widely used in computer peripheral circuits, automatic control devices and other digital control devices, such as printers, watches and clocks , digital to analog conversion equipment, and other devices. With the rapid development of science and technology, the corresponding control system also produced many types of stepper motor figure can be seen in many areas. Which uses microcontroller as the control of the control system, because of its simple circuit, lowcost, high reliability, etc., to meet the needs of many fields, we get a lot of use. Therefore, based on single-chip stepper motor control system has important practical significance.The design study is 51 single-chip stepper motor control system. As a control signal, the signal through the chip ULN2003 stepper motor drive to work through the microcontroller I / O port output timing square wave. Depending on the need, through the key circuit to control the start and stop, reversing and ramp functions such as stepper motors, stepper motors in real-time display and digital working condition. In this paper, the circuit diagram of each module, and with the ISIS Proteus software for each function control system simulation, and the simulation results are given corresponding image.Key words: microcontroller; stepper motor; motor drive; control system目录中文摘要 (I)Abstract (II)1 绪论 (1)1.1 步进电机及其发展过程 (1)1.2 步进电机在我国的应用及前景 (2)1.3 本设计的研究内容 (3)1.4 步进电机的性能指标及工作原理 (3)1.4.1 步进电机的特点 (3)1.4.2 步进电机的种类 (4)1.4.3 步进电机的主要性能指标 (5)1.4.4 步进电机的工作原理 (6)1.5 步进电机控制系统的原理 (8)2 总体方案设计 (10)2.1 设计思路的选择 (10)2.2 单片机芯片的选择 (12)2.3 驱动电机芯片的选择 (12)2.4 显示电路的选择 (13)2.5 步进电机的选择 (13)3 控制系统的硬件电路设计 (15)3.1 键盘控制电路 (15)3.2 单片机最小系统电路 (16)3.3 数码管显示电路 (18)3.4 步进电机的驱动电路 (20)3.5 步进电机的其他电路 (21)4 控制系统的软件设计 (23)4.1 主程序流程图 (23)4.2 读按键子程序流程图 (24)4.3 按键处理子程序流程图 (25)4.4 电机控制中断程序流程图 (26)5 仿真与测试 (28)5.1 仿真软件介绍 (28)5.2仿真的操作步骤 (28)5.3 电路板的焊接 (29)5.4 电路板的测试 (30)6 结论与展望 (32)致谢 (34)参考文献 (35)附录:系统总体电路图 (36)系统仿真原理图 (37)PCB打印图 (38)原件清单 (39)程序 (40)1 绪论1.1 步进电机及其发展过程步进电机是一种受脉冲信号控制,并且能将脉冲信号转化为相应的角位移或者线位移的数字电动机。
基于51单片机的步进电机的控制设计
勘电槽洗电借专理单片机应用系统设计报告设计题目:步进电机控制器设计专业班级: _____________________________ 学生姓名:____________________________________ 指导教师:____________________________________ 设计时间:2016^ 12 月设计要求及方案可以实现步进电机正转和反转控制及速度的控制,同时实现步进电机步数的控制。
2、设计方案本次设讣采用AT89C51单片机控制一个四相步进电机。
单片机输出脉冲序列, 驱动步进电机转动;并设置开关、按键电路,来控制步进电机的2挡转速,即加速、减速;以及步数的变化,即四拍驱动方式、八拍驱动方式,同时控制步进电机的转动方向,即正转、反转。
设讣方案总体框图:单片机最小系统开关、按键电路二、步进电机简介K步进电机工作原理步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的LI的:同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的LI的。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常丄作,驱动器就是为步进电机分时供电的多相时序控制器。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须山双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RET
;***********************50ms延时**********************
DELAY:
MOV R0,#100
DL1:
MOV R1,#10
DJNZ R1,$
DJNZ R0,DL1
RET
3、有减速键。减速范围为1~9档。
源程序如下:
ENA EQU P1.0
ENB EQU P1.1
IN1 EQU P1.2
IN2 EQU P1.3
IN3 EQU P1.4
IN4 EQU P1.5
;***************************检测是否有按键按下************************
TESTKEY:
SETB FAST
SETB SLOW
NEXT1:
JNB FAST,YES2
NEXT2:
JNB SLOW,YES3
MOV P0,#0 ;清显示
SETB MARK ;预启动电机工作,标识为1
MOV TEMP,#5 ;开始工作于5Hz
MOV CYCLENUM,#01H ;循环1次
JNB SWITCH,NEXT ;按键按下?
;*****************开始运行电机***************************************
MAIN:
MOV A,TEMP
MOV DPTR,#TAB4
MOVC A,@A+DPTR
MOV LEDBUF,A ;送显示
CALL DISPLAY
LOOP:
JB MARK,WORK ;检测运行标识是否为1,为1则继续运行,为0则停止运行
NOTWORK:
CLR ENA
CLR ENB
SJMP START
WORK:
MOV P1,#000010111B ;步进电机运行方式为两相四拍
CANFAST:
INC A
MOV TEMP,A
SJMP RETURN
YES3:
MOV A,TEMP
CJNE A,#1,CANSLOW
INC A
CANSLOW:
DEC A
MOV TEMP,A
MOVC A,@A+DPTR
MOV TH1,A ;存放至定时器高位
MOV A,TEMP
MOV DPTR,#TAB2
MOVC A,@A+DPTR ;获取定时器定位
MOV TL1,A ;存放至定时器低位
SWITCH EQU P3.3
FAST EQU P3.6
SLOW EQU P3.5
CYCLENUM EQU 50H ;存放对应定时循环次数
TEMP EQU 53H ;存放按键次数。初值为5,每按加速叠加1,按减速递减
CALL TIMER
CALL TESTSTOP
MOV P1,#000011011B ;第二拍
CALL TIMER
CALL TESTSTOP
MOV P1,#000101011B ;第三拍
RET
TAB1: DB 15H,0AH,07H,05H,04H,03H,03H,02H,02H ;定时器高位TH1
TAB2: DB 0B3H,0D9H,3BH,6CH,57H,0A5H,19H,0B6H,69H ;定时器地位TL1
TAB3: DB 01H,01H,01H,01H,01H,01H,01H,01H,01H ;循环次数CYCLENUM
SETB TR1
SETB EA
SETB ET1 ;启动定时器工作
WAIT:
JBC TF1,HERE
SJMP WAIT ;定时未到继续等待
HERE:
DJNZ CYCLENUM,TIMER ;循环次数未满继续定时
MARK EQU 56H ;启动停止标识
LEDBUF EQU 57H
ORG 0
AJMP START
;*****************检测是否开启启动电机键***************************
START:
SJMP START ;没有返回继续检测
NEXT:
CALL DELAY ;消抖确认
JNB SWITCH,MAIN ;再次确认按键,不为1说明按键按下
SJMP START ;没有按下,继续检测
CALL TIMER
CALL TESTSTOP
MOV P1,#000100111B ;第四拍
CALL TIMER
CALL TESTSTOP
CALL TESTKEY
SJMP MAIN
YESSTOP:
CPL MARK
ENND:
RET
;***********************定时器设置*******************
TIMER:
MOV TMOD,#10H ;T1工作于定时方式1
CALL TIMERSET
TAB4: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH ;数码显示0~9
基于51单片机的两相四线步进电机控制系统(汇编版)
关于步进电机的工作原理大家可以在网上查查,这里主要介绍的是两相四线的步进电机控制,采用的是四拍方式。
要求如下:
1、有开机停止键。按第奇数次时为开机,第偶数次为停止。此例选择P3.3口。
2、示子程序****************************
DISPLAY:
CLR P2.7
CLR P2.6
CLR P2.5
SETB P2.4 ;关闭高三位,保留个位
MOV P0,LEDBUF
MOV A,TEMP
MOV DPTR,#TAB3
MOVC A,@A+DPTR
MOV CYCLENUM,A
RET
TIMERSET:
MOV A,TEMP
MOV DPTR,#TAB1 ;获取定时器高位
RETURN:
RET
TESTSTOP:
SETB SWITCH
JNB SWITCH,GO
SJMP ENND
GO:
CALL DELAY
JNB SWITCH,YESSTOP
SJMP ENND
SJMP RETURN ;都没有键按下,则返回
YES2:
MOV A,TEMP ;FAST按下,若此时temp等于9,则保持速度不变,若小于则加1
CJNE A,#9,CANFAST
DEC A