基于AT89C51单片机步进电机控制
基于步进电机控制系统设计
基于步进电机控制系统设计摘要:文中给出了一种步进电机控制系统。
系统利用AT89C51单片机对由键盘输入的时间和角度进行控制处理,实现对步进电机运转的精确定时定位。
通过键盘输入给出步进电机需要运转的时间和角度,采用LCD1602液晶显示剩余的时间和角度。
关键词:AT89C51;步进电机1 系统总体设计方案系统由单片机,步进电机,键盘输入电路,按键电路,液晶显示电路,步进电机驱动电路,蜂鸣器电路等组成。
系统框图如图1所示。
系统以AT89C51单片机作为主控单片机,接收由键盘输入的时间和角度信号,控制步进电机精确的运行和液晶显示剩余的时间和剩余的角度。
电机正反转可以由按键模块确定;电机运行结束时候的提示音由蜂鸣器模块来完成。
2 系统硬件设计2.1 步进电机模块步进电机在本质上属于一种执行机构元件,其旋转是一步一步运行的。
每当步进驱动器接收到单片机输出地一个脉冲信号时,它将驱动步进电机按设定的旋转方向转动一个固定的角度,通常这个角度叫做”步进角”。
通常步进电机的齿数和运行拍数决定步进角。
所需要的角位移量可以通过改变脉冲的个数而得到,从而可以准确定位;其次改变脉冲的频率可以控制电机转动的速度和加速度即可进行调速。
本次设计采用四相六线步进电机,工作方式为八拍。
步进电机的齿数是50,步进角为0.9度。
一个周期内运转7.2度。
2.2 液晶显示模块设计液晶显示模块[6]采用能显示各种字体的数字、汉字、图像和自定义显示内容LCD1602显示器。
本次设计利用液晶显示步进电机运行剩余的时间和剩余的角度。
LCD1602液晶显示模块与单片机的连接如图2所示。
2.3 矩阵键盘输入模块键盘中根据按键连接方式的不同可以分为独立式键盘和行列式键盘两大类,每一类都有编码和非编码键盘之分。
编码键盘主要是用硬件识别按键,典型的应用是PC中的键盘,非编码键盘主要是通过软件来实现键盘的定义与识别,非编码键盘的特点是结构简单,成本价格低,在单片机系统中得到了广泛的应用[7],本次设计按键的识别采用的是较为常用的逐行(逐列)扫描查询法。
基于单片机的步进电机控制系统,实现DDA插补算法的程序!
基于单片机的步进电机控制系统,实现DDA插补算法的程序!本程序只是一个最简单的开始,希望和大家一起学习进步!同时祝大家中秋节快乐!今天9.9日,我刚调试出来的程序,第一时间按和大家分享!硬件:AT89C51 ,35BY48S053步进电机,keilC下编译//-------------------------//实现插补算法//作者:jc//----------------------------#include <reg51.h>#include "math.h"#define uchar unsigned char#define uint unsigned intuchar code tab[]={0x03,0x09,0x0c,0x06};//定义延时函数,延时t msvoid delay(uint t){uchar i;for(;t>0;t--)for(i=115;i>0;i--);}//定义X方向,步进电机运动void Xstep(void){uchar i;for(i=0;i<4;i++){P0=tab[i];delay(100);// P1=0x01;}}void Ystep(void){uchar j;for(j=4;j>0;j--){P1=tab[j];// P0=0xff;delay(100);}}//定时计数器T0初始化void T0_init(){TMOD=0x01; //定时器0,工作已方式0TH0=(65536-10000)/256; //重装初值TL0= (65536-10000)%256; //重装初值TR0=1; //启动T1ET0=1; //打开T1中断EA=1; //开总中断}//中断服务函数void ser()interrupt 1{ //uchar i;TH0=(65536-10000)/256; //装初值TL0= (65536-10000)%256; //装初值}void main(){ uchar j,a;uchar Fx=0;uchar X=4; //定义X,y的坐标char k;uchar N;T0_init();N = 12; //N由寄存器位数决定,由于步进电机输出四个脉冲转动1/12圈,因此次数设定N=12,//j每循环一次,步进电机输转动while(N--){for(j=0;j<8;j++){k = Fx + X -8; //判断步进电机是否需要前进if(k<0){Fx = abs(k);a = a;Ystep(); //小于0的时候向Y向前进一步delay(100);}else{Fx = k;a = a+1;Xstep();delay(100);}}}while(1);}//---------------------//实验结果:步进电机转动4周,(和N的数值有关)//深入研究插补算法的话,可以进行更仔细的设置,//程序仅仅是一个开始,在以后的一个月中,我会更深一步的研究!!//-------------------------。
基于AT89C51单片机的步进电机控制
基于AT89C51单片机的步进电机控制基于AT89C51单片机的步进电机控制摘要:随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。
采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。
软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。
本设计是采用AT89C51单片机对步进电机的控制,通过I/O口输出的时序方波作为步进电机的控制信号,信号经过芯片ULN2003驱动步进电机。
实践证明,基于单片机控制的步进电机比传统的步进控制器具有更好的性能,更加简单、方便、可靠。
本设计的主要研究对象就是开环伺服系统中最常用的执行器件——步进电机。
关键词:步进电机,单片机,正反转控制,键盘目录摘要 (1)第一章绪论 (2)1.1 步进电机及其发展 (2)1.2 步进电机在我国的发展应用及前景 (2)1.3 设计研究内容 (3)第二章控制系统硬件分析与设计 (4)2.1 步进电机 (4)2.2 单片机的选择 (6)2.3 步进电机控制系统的组成 (7)第三章控制系统软件分析与设计 (14)3.1 程序流程图 (14)3.2 读键盘子程序流程图 (15)3.3 键盘处理子程序流程图 (15)3.4 电机控制中断程序流程图 (16)第四章调试与改进 (18)4.1 调试与改进 (18)4.2 运行结果 (18)第五章总结 (19)致谢 (20)参考文献 (21)附录 (22)附录一源程序清单 (22)附录二控制原理图 (27)第一章绪论1.1 步进电机及其发展步进电机又称为脉冲电动机或阶跃电动机,它是基于最基本的电磁感应作用,将电脉冲信号转变为角位移或线位移的开环控制元件。
基于AT89C51单片机的步进电动机控制系统设计
重庆科技大学本科毕业论文基于AT89C51单片机的步进电动机控制系统设计考生姓名: XXXXX X 准考证号: XXXXXXXXXXXX 专业层次:本科院(系):XXXXXXXXXXXXXXXXXXX 指导教师: XXXXXX 职称:讲师重庆科技大学二O一二年月日基于AT89C51单片机的步进电动机控制系统设计考生姓名: XXXXXX准考证号: XXXXXXXXXXXX专业层次:本科指导教师: XXXXXXX院(系):机械与动力工程学院重庆科技大学二O一二年九月二十日摘要随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。
采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。
软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。
本设计是采用AT89C51单片机对步进电机的控制,通过I/O口输出的时序方波作为步进电机的控制信号,信号经过芯片ULN2003驱动步进电机。
实践证明,基于单片机控制的步进电机比传统的步进控制器具有更好的性能,更加简单、方便、可靠。
本设计的主要研究对象就是开环伺服系统中最常用的执行器件——步进电机。
关键词:步进电机,单片机,正反转控制,键盘控制,LCD液晶显示Based on the AT89C51 single-chip stepper motor controlsystem designABSTRACTWith the development of microelectronics and computer technology, the stepper motor demand grow with each passing day, which is widely used in printers, electric toys and other consumer products, industrial robots and CNC machine tools, medical equipment and other mechanical and electrical products, the national economy in various fields are applied. Study of stepping motor control system, to improve the control precision and response speed, energy saving etc have important significance.A stepper motor can be converted into electric pulse signal of angular displacement or line displacement of the mechanical and electrical components, a stepper motor control system is mainly composed of a stepping controller, a power amplifier and a stepper motor. Using single chip microcomputer control, using software to replace the stepping controller, which has the advantages of simple circuit, low cost, reliability is increased. Software programming can produce different types of step motor excitation sequence to control stepper motor operation mode.This design is the use of AT89C51 single-chip stepper motor control, through the I/O port output timing square wave as a stepper motor control signal, the signal through the ULN2003 chip stepper motor driver.Practice has proved, based on the single chip microcomputer to control the step motor than the traditional stepping controller has better performance, more simple, convenient, and reliable. The design of the main research object is the open loop servo system in the most commonly used executive device -- stepping motor.Keywords:Stepper motor, MCU, Positive control, Keyboard control, LCD liquid crystal display目录中文摘要 (I)英文摘要 (II)1 绪论 (1)1.1 步进电机及其发展 (1)1.2 步进电机在我国的发展应用及前景 (1)1.3 设计研究内容 (2)2 控制系统硬件分析与设计 (3)2.1 步进电机 (3)2.1.1 步进电机的原理 (3)2.1.2 步进电机的特点 (4)2.1.3 步进电机的分类 (4)2.1.4 永磁步进电机的控制原理 (5)2.2 单片机的选择 (6)2.2.1 单片机的引脚功能 (6)2.2.2 主要特性 (6)2.3 步进电机控制系统的组成 (7)2.3.1 键盘控制电路 (7)2.3.2 LCD液晶显示电路 (8)2.3.3 步进电机驱动电路 (10)3 控制系统软件分析与设计 (13)3.1 程序流程图 (13)3.2 读键盘子程序流程图 (14)3.3 键盘处理子程序流程图 (14)3.4 电机控制中断程序流程图 (15)4 调试与改进 (17)4.1 调试与改进 (17)4.2 运行结果 (17)结论 (19)致谢 (20)参考文献 (21)附录一 (22)附录二 (27)论文原创性声明1 绪论1.1 步进电机及其发展步进电机又称为脉冲电动机或阶跃电动机,它是基于最基本的电磁感应作用,将电脉冲信号转变为角位移或线位移的开环控制元件。
基于单片机电机运动控制系统设计
基于单片机的电机运动控制系统设计摘要:为了使电动机能有更高的工作效率,简化电动机的操作,文章通过对步进电机的实时控制方式及工作原理进行研究,用at89c51单片机做控制系统核心,结合步进电机的工作方法制定出电机运动控制系统的设计方案。
此方案可通过修改电机驱动电路及相应单片机程序来应用到所有的电机控制系统当中。
方案设计合理,有不错的实际应用价值。
关键词:at89c51;步进电机;运动控制系统中图分类号:tm383.6文献标识码:a文章编号:1007-9599 (2013) 06-0000-02由于现代工业化的需求,当前工业生产当中一般都使用步进电机来替代普通电机,以满足生产当中的准确度和可控性,传统电机一般只应用于手控操作,在这里不进行过多研究。
步进电机是一种将电脉冲信号转变为转子转动角度的开环控制电机,一般情况下,步进电机的转速和转矩都是可控的。
本文就以应用步进电机为前提来设计电机运动控制系统。
1步进电机是如何工作的以及如何对其进行控制1.1步进电机的具体概念。
根据不同的转子结构和材料,步进电机统共分为混合式、永磁式以及反应式三个类别。
步进电机是一种将电脉冲信号转变为转子转动角度的开环控制电机,在一般情况下,电机只根据电脉冲信号的频率、强弱和对不同相位定子绕组的信号输入顺序来改变电机运转的速度和方向,而不会由于其负载较大而影响它的运动状态。
它的转动幅度有一个最小的单位,每当接收到一个脉冲信号,电机就会转动这样一个最小单位,因此可以通过脉冲信号的输出方式来对步进电机的工作量进行精确控制,并且可以通过一系列算法来实时监控步进电机的运转状态。
1.2步进电机时如何进行工作的。
步进电机的工作主要是靠对电流的感应,所以,依靠供电电路的支持,将普通的直流电转变为按照一定频率,一段一段地对电机供电,而且仅有在这种一段一段的特殊直流电下,步进电机才能够正常工作。
这种特殊的直流电供电方式叫做分时供电,而提供分时供电的设备就是驱动器。
毕业设计(论文)-基于AT89C51单片机的步进电机控制系统

内蒙古科技大学本科生毕业设计说明书(毕业论文)题目:基于AT89C51单片机的步进电机控制系统设计学生姓名:学号:专业:自动化班级:自动化06-3班指导教师:基于AT89C51单片机的步进电机控制系统摘要步进电机是数字控制系统中的一种执行元件,它能按照控制脉冲的要求,迅速起动,制动,正反转和调速。
具有步距角精度高,停止时能自锁等特点,因此步进电机在自动控制系统中,特别是在开环的控制系统中得到了日益广泛的应用。
本文以单片机和环形脉冲分配器为核心设计的步进电机控制系统,通过软硬件的设计调试,实现步进电机能根据设定的参数进行自动加减速控制,使控制系统以最短的时间到达控制终点,而又不发生失步的现象;同时它能准确地控制步进电机的正反转,启动和停止。
硬件是以AT89C51单片机为核心的控制电路,主要包括:环形脉冲分配器、键盘显示电路、步进电机的驱动电路等。
软件部分采用C语言编程,主要包括键盘显示程序、步进电机的调速程序、停止判断程序等。
关键词:步进电机控制系统;调速;单片机Based on AT89C51 Single-chip ComputerStepping Motor Control SystemAbstractStepping motor is a kind of digital control system components. It can achieve quick start-up, positive inversion, stopping and speed control, according to the control pulse. It has high precision step angle, and can be self-locking when it keeps still. As these characteristics, stepping motor in automatic control system, especially in the open loop control system has been widely applied.This article mainly focuses on taking Single-chip Computer and cycle pulse distributor as the core, and designing the stepping motor control system. Through the design of the software and hardware debugging, it realizes controlling the step motor’s acceleration and deceleration automatically, according to parameter setting. Making the system arrive the end point with the shortest time, but not occur outing of step. Besides it can accurately achieve start-up, positive inversion and shutdown. Hardware takes AT89C51 as the core of control circuit, mainly including: cycle pulse distributor, keyboard and display circuit, stepping motor driving circuit, etc. Software part adopts the C language programming, mainly including keyboard and display program, stepping motor speed control program, stop judging program, etc.Key words: Stepping motor control system; speed control; Single-chip Computer目录摘要 (I)Abstract (II)第一章引言 (1)1.1 课题提出的背景和研究意义 (1)1.2 课题的主要研究内容 (2)1.3 本章小结 (2)第二章步进电机控制系统设计 (3)2.1 步进电机的原理 (3)2.1.1 三相单三拍通电方式 (3)2.1.2 三相双三拍通电方式 (5)2.1.3 三相六拍通电方式 (6)2.2 环形脉冲分配器 (8)2.3 续流电路 (12)2.3.1 二极管续流 (13)2.3.2 二极管—电阻续流 (14)2.4 步进电机驱动电路 (15)2.5 步进电机的变速控制 (17)2.5.1 变速控制的方法 (19)2.6 步进电机在自动生产线中的应用 (20)2.7 本章小结 (22)第三章控制系统硬件设计 (23)3.1 硬件系统设计原则 (23)3.2 控制系统组成 (23)3.3 主要元件的选择 (24)3.3.1 单片机的选择 (24)3.3.2 EPROM的选择 (25)3.3.3 可逆计数器的选择 (27)3.4 控制系统接口电路的设计 (27)3.4.1 环形脉冲分配器设计 (27)3.4.2 显示电路设计 (29)3.4.3 外部复位电路设计 (30)3.5 控制系统整体电路设计 (31)3.6 本章小结 (31)第四章控制系统软件设计 (32)4.1 软件系统设计原则 (32)4.2 步进电机控制系统功能设计 (32)4.3 主程序设计 (33)4.3.1 主程序工作过程 (33)4.3.2 主程序工作流程图 (34)4.3.3 定时器T0中断程序流程图 (34)4.4 Proteus仿真 (37)4.5 显示程序设计 (39)4.6 键盘程序设计 (39)4.7 调速程序设计 (41)4.7.1 20BY步进电机参数 (41)4.7.2 步进电机转速与频率的关系 (41)4.8 本章小结 (42)第五章结束语 (43)参考文献 (44)附录 (46)附录A 系统程序(C) (46)附录B 20BY步进电机转速与定时器定时常数关系表 (59)附录C 控制系统电路图 (62)致谢 (63)第一章引言1.1 课题提出的背景和研究意义由于步进电机不需要位置传感器或速度传感器就可以实现定位,即使在开环状态下它的控制效果也是令人非常满意的,这有利于装置或设备的小型化和低成本,因此步进电机在计算机外围设备、数控机床和自动化生产线等领域中都得到了广泛的应用。
利用单片机AT89C51控制步进电机毕业论文(论文)
利用单片机AT89C51控制步进电机毕业论文(论文)广州城建职业学院毕业设计题目利用单片机AT89C51控制步进电机所在系机电与信息工程学院专业班级 10应用电子技术班学生姓名罗 X X学生学号 1004080123指导老师李有兵广州城建职业学院教务处制利用单片机AT89C51控制步进电机10应用电子技术班罗汉友指导教师:李有兵摘要步进电动机是一种将电脉冲信号转换成角位移或线位移的精密执行元件,由于步进电机具有控制方便、体积小等特点,所以在数控系统、自动生产线、自动化仪表、绘图机和计算机外围设备中得到广泛应用。
微电子学的迅速发展和微型计算机的普及与应用,为步进电动机的应用开辟了广阔前景,使得以往用硬件电路构成的庞大复杂的控制器得以用软件实现,既降低了硬件成本又提高了控制的灵活性,可靠性及多功能性。
在当今社会的各个领域步进电机无处不在,应用领域涉及机器人、工业电子自动化设备、医疗器件、广告器材、舞台灯光设备、印刷设备、计算机外部应用设备等等。
因此,设计出高精确度、实时监控、语音提示的步进电机具有重要的现实意义和实用价值。
本文介绍了单片机控制步进电机的系统。
步进电机是机电控制中一种常用的执行机构,其原理是通过对它每相线圈中的电流和顺序切换来使电机作步进式旋转。
本文先介绍了混合式步进电机的结构和工作原理,分析了细分驱动对于改善步进电机运行性能的作用,设计主要采用控制电路主要由AT89C51单片机、晶振电路、地址锁存器、译码器、数码管显示电路组成,单片机是控制系统的核心。
文中对整个系统的架构及硬件电路和驱动软件的实现都做了详细的介绍。
关键词AT89C51;步进电机;正反转目录第1章单片机控制系统概述 (3)1.1单片机系统概述 (3)1.2 AT89C51单片机概述 (4)第2章步进电机概述 (9)2.1 步进电机的基本介绍 (9)2.2 步进电机的特点及种类 (10)2.3 步进电机的选择 (11)第3章单片机编程软件概述 (12)3.1 Keil软件简介 (12)3.2 Keil工程项目建立 (12)3.3 C语言程序代码 (13)第4章硬件电路设计 (21)4.1电路设计构思 (21)4.2 硬件电路设计 (23)结论 (25)致谢 (26)参考文献 (27)第1章单片机控制系统概述1.1单片机系统概述随着材料科学、工艺技术、计算机技术的发展与进步,电路系统向着集成度极高的方向发展。
基于AT89C51单片机的步进电动机控制系统设计
基于AT89C51单片机的步进电动机控制系统设计步进电动机是一种运动精度高、控制方便的电动机。
在很多应用中,需要使用步进电动机进行精确的位置控制,因此设计一个基于AT89C51单片机的步进电动机控制系统非常有意义。
本文将设计一个基于AT89C51单片机的步进电动机控制系统的原理、硬件电路和软件设计方案,并进行详细的说明。
1.原理步进电动机通过依次在不同的相上加电来实现精确的旋转运动。
控制步进电动机的主要原理是通过改变控制相的顺序和频率来控制电动机的转向和运动速度。
在本设计中,我们将使用四相步进电动机,即控制电动机旋转需要改变四个相的状态。
2.硬件电路设计硬件电路主要包括:电源电路、单片机模块、驱动模块和步进电动机模块。
(1)电源电路:为步进电动机和单片机提供适当的电源电压和电流。
(2)单片机模块:使用AT89C51单片机作为主控制器,通过引脚控制驱动模块的工作状态。
(3)驱动模块:用于驱动步进电动机,可选择使用L298N或ULN2003驱动芯片。
(4)步进电动机模块:包括四相步进电动机和相应的接线。
3.软件设计方案(1)初始化:设置单片机工作模式、引脚方向和初始状态。
(2)编写驱动程序:根据步进电动机的相序进行编写,并通过控制相的芯片来控制电机的转向和运动速度。
(3)编写控制程序:通过按键或外部信号触发,调用相应的驱动程序来实现步进电动机的控制。
(4)编写显示程序:通过液晶显示屏或LED灯等方式显示步进电动机的状态,方便用户了解电动机的运行情况。
4.系统功能和特点本控制系统具有以下功能和特点:(1)精确控制:通过改变相序和频率控制电动机的转向和运动速度,实现步进电动机的精确控制。
(2)高效稳定:采用AT89C51单片机作为主控制器,具有高效、稳定的运行特性。
(3)灵活可扩展:可以根据实际需求添加外部输入或输出模块,实现更多功能的扩展。
(4)易操作性:可以通过按键或外部信号触发,方便用户进行操作和控制。
利用单片机AT89C51控制步进电机

利用单片机AT89C51控制步进电机作者:李有兵苗晓培林书句谢元成来源:《科学与财富》2012年第03期摘要:本文利用单片机AT89C51来控制四相步进电机,并通过LCD1602来显示其运行状态。
通过软件设计实现让步进电机启动/停止、正/反转、调速以及设置运行的步数等功能。
且电路简单、控制方便成本低,适用范围广和实用价值高。
关键词:AT89C51;步进电机;LCD1602;正/反转步进电机是机电控制中一种常用的元件,它是将电脉冲转化为角位移或者线位移。
在非超载运行的情况下,电机的运行速度、停止的位置仅仅取决于脉冲信号的频率和脉冲数。
通俗的说,给步进电机驱动器加一个脉冲信号,步进电机就按照设定的方向转一个固定的步距角。
由于步进电机具有结构简单、维护方便、精确度高、启动灵敏、停车准确,误差较小且无累计误差等特点使得步进电机在工业生产中应用相当的广泛。
而利用单片机控制步进电机系统具有成本低、设计简单、操作方便的特点,在数控机床、工业自动控制等领域被广泛的应用。
1、步进电机的控制1.1步进电机的驱动系统步进电机必须由脉冲产生器发出脉冲信号以及脉冲指令,然后步进电机驱动器依据脉冲指令提供电流驱动步进电机运行。
1.2 步进电机的励磁方式步进电机有2相、4相、5相电机。
本文运用的为4相电机,但是励磁方式有1相(单相)励磁、2相(双相)励磁和1-2相(单-双相)励磁。
步进电机严格的按照励磁的方式运行。
例如:4相步进电机在1-2相励磁的顺序为:A—AB—B—BC—C—CD—D—DA。
如果要求步进电机反转运行只要将步进电机的励磁方式改为:DA—D—CD—C—BC—B—BA—A就可以让步进电机反转运行。
利用AT89C51单片机的P1.0~P1.3这四条I/O控制线,通过步进电机驱动器向4相步进电机传送控制信号,让其励磁方式为1-2相励磁,则步进电机在顺时针运行情况下单片机I/O端口的状态如表1所示。
1.3 步进电机的速度和位置控制当给步进电机发送一个脉冲,它就会转一步,给它再发送一个脉冲,它会再转一步。
基于AT89C51单片机步进电机控制系统的设计

总第170期2008年第8期 舰船电子工程S hi p E lectronic Engineering V ol .28N o .8 204 基于A T 89C 51单片机步进电机控制系统的设计3杨辉媛1) 杨红海2) 谭伟杰1)(湖南省吉首大学物理信息工程学院1) 吉首 416000)(湖南省张家界市慈利县第二职中2) 张家界 427200)摘 要 通过A T89C 51单片机及脉冲分配器(又称逻辑转换器)P MM 8713完成步进电机各种运行方式的控制。
实现步进电机在三拍、六拍工作方式下的正反转控制、无级调速控制等功能。
整个系统采用模块化设计,结构简单、可靠,通过人机交互接口可实现各功能设置,操作简单,易于掌握。
关键词 步进电机;单片机控制;A T89C51;P MM 8713中图分类号 T P368.1D esign of Control System for S tep M otor B ased on AT 89C 51Y ang H uiy uan 1) Yang H ong hai 2) T an W eijie1)(College of Physics Sc i ence and Infor m ati on E nginee ri ng,J ishou U niversity 1),J i shou 416000)(The S econd V oca tional SeniorM i ddle S chool ,C ili C ounty,Z hangji a jie C ity,H unan P rovi nce 2),Zhajjiajie 427200)A b s tra c t This system w hich se l ec ts the S i ngl e -chip co mpute r A T89C51and the pulse di v i der P MM 8713to control step m otor ’s each m ovem ent m ethod m ay rea lize the func tions such as turning i n its w orking m ode and changing it s speed w ith step less f requency conversion in three pa ts or six pa ts m ode .D ue to the m odular design of the ove rall system and the si m ply and reli 2able structure,the syst em has m any advantages such as good ext ensibility through m an -m achine interac tion,si m ple ope ration and easy to m aste r .Ke y w o rd s step m otor,single -chi p computer control ,A T89C51,P MM 8713C l a s s N um be r TP368.11 引言单片机控制的步进电机广泛地应用于工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,投影仪、数码摄像机、放像机(V CD 、DV D 等)、大型望远镜、卫星天线定位系统、医疗器械、条码扫描仪以及各种可控机械工具等等。
基于单片机的步进电机控制设计毕业论文
基于单片机的步进电机控制设计毕业论文摘要:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件,在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,广泛应用在各种自动化控制系统。
本设计以AT89C51单片机为核心,对步进电机进行控制,通过按键实现步进电机正转、反转、加速、减速,并使用LED显示电机速度。
经过PROTEUS仿真和硬件焊接,结果表明,系统实现了要求。
该电路简单,可靠性强,运行稳定。
关键词:AT89C51;ULN2003;LED;步进电机单片机具有体积小、功耗低、控制功能强、扩展灵活、微型化和使用方便等优点,广泛应用于仪器仪表中,结合不同类型的传感器,可实现诸如电压、功率、频率、湿度、温度、流量、速度、厚度、角度、长度、硬度、元素、压力等物理量的测量。
采用单片机控制使得仪器仪表数字化、智能化、微型化,且功能比起采用电子或数字电路更加强大。
例如精密的测量设备(功率计,示波器,各种分析仪)。
同时用单片机还可以构成形式多样的控制系统、数据采集系统。
例如工厂流水线的智能化管理,电梯智能化控制、各种报警系统,与计算机联网构成二级控制系统等。
目前,单片机正朝着高性能和多品种方向发展趋势将是进一步向着CMOS化、低功耗大容量、高性能、低价格和外围电路内装化等几个方面发展。
综合所述,单片机已成为计算机发展和应用的一个重要方面。
另一方面,单片机应用的重要意义还在于,它从根本上改变了传统的控制系统设计思想和设计方法。
从前必须由模拟电路或数字电路实现的大部分功能,现在已能用单片机通过软件方法来实现了。
这种软件代替硬件的控制技术也称为微控制技术,是传统控制技术的一次革命[2]。
步进电机作为执行元件,是机电一体化的关键产品之一,随着工业自动化的发展,步进电机的应用也越来越广泛,广泛应用在各种自动化控制系统中。
步进电机是一种用于开环控制的驱动元件。
它是用电脉冲信号进行控制,将电脉冲信号转换成相应的角位移或线位移的微电动机。
课程设计(论文)-基于AT89C51单片机的步进电机控制系统设计模板

摘要近年来随着科技的飞速发展,单片机的应用正在不断地走向深入,同时带动传统控制检测日新月益更新。
本次课程设计是用单片机来控制步进电机的定位和正反旋转。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
整个系统有89C51单片机控制系统,L298驱动电路,4*4的键盘控制电路,LED显示电路。
用89C51单片机控制两相四线步进电机,在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
通过控制脉冲个数即可以控制角位移量,从而达到准确定位的目的;同时通过控制脉冲的相序来改变步进电机的转动方向,从而达到的控制正反转的目的。
本系统采用单片机AT89C51为中心器件来控制步进电机,系统实用性强。
关键字:单片机;步进电机;脉冲;步距角目录1 前言 (3)2 步进电机工作原理 (4)2.1两相步进电机结构 (4)2.2两相步进电机的原理 (4)2.3两相步进电机的供电方式 (5)3 硬件系统设计 (6)3.1系统总体设计框图 (6)3.2单片机系统 (6)3.3时钟信号控制电路 (7)3.4电源电路 (8)3.5驱动电路 (8)3.6显示电路 (9)3.7 4*4键盘电路 (9)4 软件系统设计 (10)4.1主程序流程图及源代码 (10)4.2扫描键盘流程图及源代码............... . (11)4.3 LED显示流程图及源代码 (12)5 开发系统简介.............................. . (14)5.1 W A VE6000编译器简介 (14)5.2 protues仿真平台简介 (14)6 仿真结果及分析 (16)7 课程设计总结 (19)附录 (20)1 前言本次课程设计是以步进电机控制和驱动为要求,用单片机来控制步进电机的定位和正反旋转圈数的显示。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
毕业设计:基于AT89C51的步进电机控制(2)
基于AT89C51的步进电机控制摘要本设计采用ATMEL系列的单片机对步进电机进行控制,实现以下功能:开机后,电机不转,按下启动键,电机旋转;按下正转键,电机正转;按下反转键,电机反转。
实现这一功能,系统的硬件部分应由四模块构成:输入模块、单片机控制模块、步进电机驱动模块、步进电机模块。
通过键盘输入,单片机编程控制,输出信号给步进电机驱动电路ULN2003A,最后由ULN2003A驱动步进电机按规定的方向运转。
用单片机控制步进电机,可以简化硬件电路,可同时实现各种功能,如步进电机的加减速,步进电机正反转等,当功能要求改变时,只需改变程序,而硬件电路不变,实现功能的方式简单便捷。
关键词:单片机;步进电机The Control Of Stepping Motor Based On AT89C51AbstractStepping motor is controlled by the microcontroller , a sort of ATMEL series ,in the design. The function can be realized as follows:When the start button is pressed, motor begins to run;When the foreward button is pressed,motor begins to run in the positive direction;When the reversional button is pressed,motor begins to run in the opposite direction. To realize the features described above,the circuits should consist of four modules:input circuit,microcontroller,drive circuit of stepping motor and stepping motor. After the input of keyboard and programming of microcontroller,stepping motor is driven in the direction set by ULN2003A circuit which accepts output signal.The control of stepping motor by :microcontroller can simplify the circuit and can realize many functions,e.g. it can change the operation mode of stepping motor and speed,and so on. When the function need to be changed,the same circuit can be used and the only thing that you should do is to modify program . So it is convenient to use microcontroller to realize the control of motor .Keyword :microcontroller ;stepping motor目录第1章. 绪论.................................................................................................................... - 1 -1.1. 单片机的特点............................................................................................... - 1 -1.2. 单片机的发展趋势....................................................................................... - 1 -1.3. 单片机的任务............................................................................................... - 2 -第2章. 系统设计............................................................................................................ - 4 -2.1. 设计要求....................................................................................................... - 4 -2.2. 设计构思....................................................................................................... - 4 -2.3. 设计元件的选型........................................................................................... - 5 -第3章. 系统核心元件的介绍........................................................................................ - 6 -3.1. 单片机简介................................................................................................... - 6 -3.1.1. 单片机的基本组成............................................................................ - 6 -3.1.2. 单片机的特点.................................................................................... - 8 -3.1.3. 单片机的应用.................................................................................... - 8 -3.2. AT89C51的简介............................................................................................ - 9 -3.2.1. AT89C51的结构................................................................................. - 9 -3.2.2. AT89C51的引脚介绍....................................................................... - 10 -第4章. 系统的硬件设计.............................................................................................. - 12 -4.1. 输入电路的设计......................................................................................... - 12 -4.1.1. 键盘输入.......................................................................................... - 12 -4.1.2. 键盘接口的工作原理...................................................................... - 12 -4.2. AT89C51设计电路...................................................................................... - 13 -4.2.1. 时钟电路.......................................................................................... - 13 -4.2.2. 复位电路.......................................................................................... - 14 -4.3. 步进电机驱动电路..................................................................................... - 16 -4.4. 步进电机..................................................................................................... - 17 -4.4.1. 步进电机原理.................................................................................. - 17 -4.4.2. 步进电机励磁控制.......................................................................... - 17 -4.5. 系统的总体硬件电路................................................................................. - 19 -第5章. 系统的软件设计.............................................................................................. - 21 -5.1. 系统的程序分析......................................................................................... - 21 -5.2. 软件流程图................................................................................................. - 21 -5.2.1. 键盘程序的设计.............................................................................. - 22 -5.2.2. 步进电机驱动程序.......................................................................... - 22 -第6章. 电路的仿真...................................................................................................... - 26 -6.1. 仿真的介绍................................................................................................. - 26 -6.2. 仿真的过程................................................................................................. - 26 -结束与展望..................................................................................................................... - 28 -参考文献......................................................................................................................... - 29 -致谢................................................................................................................................. - 30 -附录1:译文原文.............................................................................. 错误!未定义书签。
AT89C51单片机控制步进电机
. . . .摘要步进电机是一种进行精确步进运动的机电执行元件,它广泛应用于工业机械的数字控制,为使系统的可靠性、通用性、可维护性以及性价比最优,根据控制系统功能要求及步进电机应用环境,确定了设计系统硬件和软件的功能划分,从而实现了基于8051单片机的四相步进电机的开环控制系统。
控制系统通过单片机存储器、I/O接口、中断、键盘、LED显示器的扩展、步进电机的环形分频器、驱动及保护电路、人机接口电路、中断系统及复位电路、单电压驱动电路等的设计,实现了四相步进电机的正反转,急停等功能。
为实现单片机控制步进电机系统在数控机床上的应用,系统设计了两个外部中断,以实现步进电机在某段时间的反复正反转功能,也即数控机床的刀架自动进给运动,随着单片机技术的不断发展,单片机在日用电子产品中的应用越来越广泛,自六十年代初期以来,步进电机的应用得到很大的提高。
人们用它来驱动时钟和其他采用指针的仪器,打印机、绘图仪,磁盘光盘驱动器、各种自动控制阀、各种工具,还有机器人等机械装置。
此外作为执行元件,步进电机是机电一体化的关键产品之一,被广泛应用在各种自动化控制系统中,随着微电子和计算机技术的发展,它的需要量与日俱增,在各个国民经济领域都有应用。
步进电机是机电数字控制系统中常用的执行元件,由于其精度高、体积小、控制方便灵活,因此在智能仪表和位置控制中得到了广泛的应用大规模集成电路的发展以及单片机技术的迅速普及,为设计功能强,价格低的步进电机控制驱动器提供了先进的技术和充足的资源。
关键词:步进电机;单片机;精度高;体积小;控制方便。
目录设计要求 (2)1.1设计要求 (2)1.2验收标准 (2)步进电机原理及硬件和软件设计 (2)2.1步进电机工作方式 (2)2.2 总体设计方框图 (5)2.3 设计原理分析 (6)2.3.1元器件介绍:步进电机 (6)2.3.2方案论证 (7)2.3.3硬件设计 (8)2.3.4元件清单 (12)2.3.5 软件设计 (13)总结 (19)致 (19)参考文献 (20)附录 (21)设计要求1.1设计要求(1)最小系统:选择AT89C51单片机为核心元件构成系统。
单片机AT89c51控制步进电动机设计.
第一章前言1.1步进电机简介步进电机最早是在1920年由英国人所开发。
1950年后期晶体管的发明也逐渐应用在步进电机上,这对于数字化的控制变得更为容易。
以后经过不断改良,使得今日步进电机已广泛运用在需要高定位精度、高分解性能、高响应性、信赖性等灵活控制性高的机械系统中。
在生产过程中要求自动化、省人力、效率高的机器中,我们很容易发现步进电机的踪迹,尤其以重视速度、位置控制、需要精确操作各项指令动作的灵活控制性场合步进电机用得最多。
步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
步进电机是将电脉冲信号变换成角位移或直线位移的执行部件。
步进电机可以直接用数字信号驱动,使用非常方便。
一般电动机都是连续转动的,而步进电动机则有定位和运转两种基本状态,当有脉冲输入时步进电动机一步一步地转动,每给它一个脉冲信号,它就转过一定的角度。
步进电动机的角位移量和输入脉冲的个数严格成正比,在时间上与输入脉冲同步,因此只要控制输入脉冲的数量、频率及电动机绕组通电的相序,便可获得所需的转角、转速及转动方向。
在没有脉冲输入时,在绕组电源的激励下气隙磁场能使转子保持原有位置处于定位状态。
因此非常适合于单片机控制。
步进电机还具有快速启动、精确步进和定位等特点,因而在数控机床,绘图仪,打印机以及光学仪器中得到广泛的应用。
步进电动机已成为除直流电动机和交流电动机以外的第三类电动机。
传统电动机作为机电能量转换装置,在人类的生产和生活进入电气化过程中起着关键的作用。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。
第二章步进电机工作原理及系统方案论证2.1步进电机工作原理2.1.1步进电机结构电机转子均匀分布着40个小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定子和转子的展开图:图2.12.1.2 步进电机的旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
基于.AT89C51单片机的步进电机控制和驱动电路设计说明书

基于AT89C51单片机的步进电机控制及驱动电路设计引言国内控制器的研究起步较晚.运动控制技术为一门多学科交叉的技术.是一个以自动控制理论和现代控制理论为基础.包括许多不同学科的技术领域。
如电机技术、电力电子技术、微电子技术、传感器技术、控制理论和微计算机技术等.运动控制技术是这些技术的有机结合体。
总体上来说.国内研究取得很大的进步.但无论从控制器还是从控制软件上来看.与国外相比还是具有一定差距。
传统上由纯电路设计的步进电机控制和驱动电路一般较复杂.成本又高.而且一旦成型就难于修改.可移植性差.难以适应一些智能化要求较高的场合。
单片机的普及与应用.为步进电机的应用开辟了广阔的前景.使得以往用硬件电路构成的庞大复杂的控制器得以用软件实现.将会避免复杂电路的设设计.既降低了硬件成本又提高了控制的灵活性、可靠性及多功能性。
本文主要介绍了步进电机的基本原理及AT89C51单片机的性能特点。
设计主要研究了一种基于AT89C51单片机和ULN2003驱动芯片的步进电机控制及驱动电路系统。
该系统可分为:控制模块、驱动模块、显示模块、人机交互模块四大部分。
其中采用AT89C51单片机作为控制模块的核心.利用单片机编程实现了对步进电机启动停止、正转反转、加速减速等功能的基本控制。
驱动模块由芯片ULN2003A驱动步进电机工作;显示部分由七段LED共阴数码管组成;人机互换部分由相应的按键实现相应的功能。
通过实际测试表明本设计系统的性能优于传统步进电机控制器.具有结构简单、可靠性高、实用性强、人机接口简单方便、性价比高等特点。
目录1设计原理及方案 (4)1.1 设计原理 (4)1.2 设计方案 (4)1.2.1 方案一 (5)1.2.2 方案二 (6)1.2.3 方案比较及选择 (7)2 设计实现 (8)2.1 主要元器件介绍 (8)2.1.1 四相六线步进电机的介绍 (8)2.1.2 AT89C51单片机芯片介绍 (10)2.1.3 ULN2003芯片介绍 (11)2.1.4 LED七段数码管介绍 (11)2.2 步进电机控制及驱动系统电路设计实现 (12)2.2.1 硬件设计 (12)2.2.2 软件设计 (15)3 电路调试 (15)3.1 软件的仿真 (16)3.2 硬件电路的调试 (17)4 数据分析及总结 (18)4.1 测试数据及说明 (18)4.2 总结 (19)参考文献 (19)附录 (20)1设计原理及方案1.1 设计原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
基于AT89C51单片机控制的步进电机
本文链接:/Periodical_dqpj201410150.aspx
170
消费电子1404-5.indd
170
2014-6-26
19:17:11
基于AT89C51单片机控制的步进电机
作者: 作者单位: 刊名: 英文刊名: 年,卷(期): 余晓敏 安阳钢铁集团有限责任公司运输部,河南安阳,455004 消费电子 Consumer Electronics Magazine 2014(10)
Computer AT89C51 单片机控制的步进电机
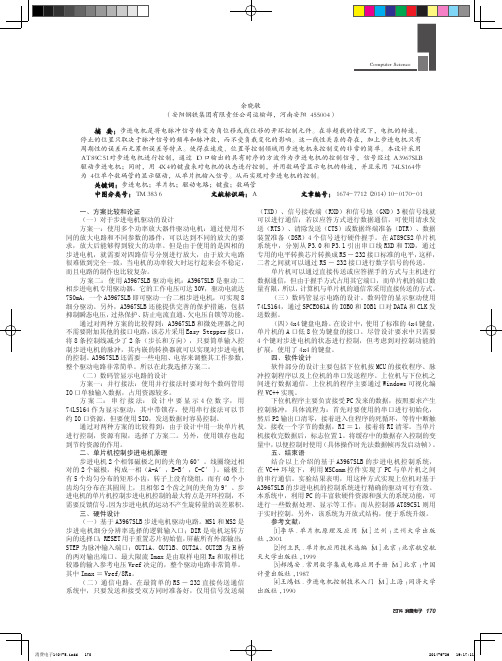
余晓敏 (安阳钢铁集团有限责任公司运输部,河南安阳 455004) 摘 要:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、 停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。这一线性关系的存在,加上步进电机只有 周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。本设计采用 AT89C51 对步进电机进行控制,通过 IO 口输出的具有时序的方波作为步进电机的控制信号,信号经过 A3967SLB 驱动步进电机;同时,用 4X4 的键盘来对电机的状态进行控制,并用数码管显示电机的转速,并且采用 74LS164 作 为 4 位单个数码管的显示驱动,从单片机输入信号。从而实现对步进电机的控制。 关键词:步进电机;单片机;驱动电路;键盘;数码管 中图分类号:TM383.6 文献标识码:A 文章编号:1674-7712 (2014) 10-0170-01 一、方案比较和论证 (一)对于步进电机驱动的设计 方案一:使用多个功率放大器件驱动电机:通过使用不 同的放大电路和不同参数的器件,可以达到不同的放大的要 求,放大后能够得到较大的功率。但是由于使用的是四相的 步进电机,就需要对四路信号分别进行放大,由于放大电路 很难做到完全一致,当电机的功率较大时运行起来会不稳定, 而且电路的制作也比较复杂。 方案二:使用 A3967SLB 驱动电机:A3967SLB 是驱动二 相步进电机专用驱动器。它的工作电压可达 30V,驱动电流达 750mA,一个 A3967SLB 即可驱动一台二相步进电机,可实现 8 细分驱动。另外,A3967SLB 还能提供完善的保护措施,包括 抑制瞬态电压, 过热保护、 防止电流直通、 欠电压自锁等功能。 通过对两种方案的比较得到:A3967SLB 和微处理器之间 不需要附加其他的接口电路, 该芯片采用 Easy Stepper 接口, 将 8 条控制线减少了 2 条(步长和方向),只要简单输入控 制步进电机的脉冲,其内嵌的转换器就可以实现对步进电机 的控制。A3967SLB 还需要一些电阻、电容来调整其工作参数, 整个驱动电路非常简单。所以在此我选择方案二。 (二)数码管显示电路的设计 方案一:并行接法:使用并行接法时要对每个数码管用 IO 口单独输入数据,占用资源较多。 方 案 二: 串 行 接 法: 设 计 中 要 显 示 4 位 数 字, 用 74LS164 作为显示驱动,其中带锁存,使用串行接法可以节 约 IO 口资源,但要使用 SIO,发送数据时容易控制。 通过对两种方案的比较得到:由于设计中用一块单片机 进行控制,资源有限,选择了方案二。另外,使用锁存也起 到节约资源的作用。 二、单片机控制步进电机原理 步进电机 2 个相邻磁极之间的夹角为 60°。线圈绕过相 对的 2 个磁极,构成一相(A-A′,B-B′,C-C′ )。磁极上 有 5 个均匀分布的矩形小齿,转子上没有绕组,而有 40 个小 齿均匀分布在其圆周上,且相邻 2 个齿之间的夹角为 9°。步 进电机的单片机控制步进电机控制的最大特点是开环控制,不 需要反馈信号。 因为步进电机的运动不产生旋转量的误差累积。 三、硬件设计 (一)基于 A3967SLB 步进电机驱动电路。MS1 和 MS2 是 步进电机细分分辨率选择的逻辑输入口;DIR 是电机运转方 向的选择口;RESET 用于重置芯片初始值, 屏蔽所有外部输出; STEP 为脉冲输入端口;OUT1A、OUT1B、OUT2A、OUT2B 为 H 桥 的两对输出端口。最大限流 Imax 是由取样电阻 Rs 和取样比 较器的输入参考电压 Vref 决定的,整个驱动电路非常简单。 其中 Imax = Vref/8Rs。 (二)通信电路。在最简单的 RS - 232 直接传送通信 系统中,只要发送和接受双方同时准备好,仅用信号发送端 (TXD)、信号接收端(RXD)和信号地(GND)3 根信号线就 可以进行通信;若以应答方式进行数据通信,可使用请求发 送(RTS)、清除发送(CTS)或数据终端准备(DTR)、数据 装置准备(DSR)4 个信号进行硬件握手。在 AT89C52 单片机 系统中,分别从 P3.0 和 P3.1 引出串口线 RXD 和 TXD,通过 专用的电平转换芯片转换成 RS - 232 接口标准的电平, 这样, 二者之间就可以通过 RS - 232 接口进行数字信号的传送。 单片机可以通过直接传送或应答握手的方式与主机进行 数据通信,但由于握手方式占用其它端口,而单片机的端口数 量有限, 所以, 计算机与单片机的通信常采用直接传送的方式。 (三)数码管显示电路的设计。数码管的显示驱动使用 74LS164,通过 SPCE061A 的 IOB0 和 IOB1 口对 DATA 和 CLK 发 送数据。 (四) 4x4 键盘电路。 在设计中, 使用了标准的 4x4 键盘, 单片机的 A 口低 8 位为键盘的接口。尽管设计要求中只需要 4 个键对步进电机的状态进行控制,但考虑到对控制功能的 扩展,使用了 4x4 的键盘。 四、软件设计 软件部分的设计主要包括下位机按 MCU 的接收程序、脉 冲控制程序以及上位机的串口发送程序。上位机与下位机之 间进行数据通信。上位机的程序主要通过 Windows 可视化编 程 VC++ 实现。 下位机程序主要负责接受 PC 发来的数据,按照要求产生 控制脉冲,具体流程为:首先对要使用的串口进行初始化, 然后 P2 输出口清零,接着进入住程序的死循环,等待中断触 发。接收一个字节的数据,RI = 1,接着将 RI 清零。当单片 机接收完数据后,标志位置 1。将缓存中的数据存入控制的变 量中, 以便控制时使用 (具体操作时先法数据帧再发启动帧) 。 五、结束语 结合以上介绍的基于 A3967SLB 的步进电机控制系统, 在 VC++ 环境下,利用 MSComm 控件实现了 PC 与单片机之间 的串行通信。实验结果表明,用这种方式实现上位机对基于 A3967SLB 的步进电机的控制系统进行精确的驱动可行有效。 本系统中,利用 PC 的丰富软硬件资源和强大的系统功能,可 进行一些数据处理、显示等工作;而从控制器 AT89C51 则用 于实时控制。另外,该系统为开放式结构,便于系统升级。 参考文献: [1] 李华 . 单片机原理及应用 [M]. 兰州 : 兰州大学出版 社 ,2001. [2] 何立民 . 单片机应用技术选编 [M]. 北京 : 北京航空航 天大学出版社 ,1999. [3] 郝鸿安 . 常用数字集成电路应用手册 [M]. 北京 : 中国 计量出版社 ,1987. [4] 王鸿钰 . 步进电机控制技术入门 [M]. 上海 : 同济大学 出版社 ,1990.
毕业设计-基于AT89C51单片机的步进电机控制及驱动电路设计
引言国内控制器的研究起步较晚,运动控制技术为一门多学科交叉的技术,是一个以自动控制理论和现代控制理论为基础,包括许多不同学科的技术领域。
如电机技术、电力电子技术、微电子技术、传感器技术、控制理论和微计算机技术等,运动控制技术是这些技术的有机结合体。
总体上来说,国内研究取得很大的进步,但无论从控制器还是从控制软件上来看,与国外相比还是具有一定差距。
传统上由纯电路设计的步进电机控制和驱动电路一般较复杂,成本又高,而且一旦成型就难于修改,可移植性差,难以适应一些智能化要求较高的场合。
单片机的普及与应用,为步进电机的应用开辟了广阔的前景,使得以往用硬件电路构成的庞大复杂的控制器得以用软件实现,将会避免复杂电路的设设计,既降低了硬件成本又提高了控制的灵活性、可靠性及多功能性。
本文主要介绍了步进电机的基本原理及AT89C51单片机的性能特点。
设计主要研究了一种基于AT89C51单片机和ULN2003驱动芯片的步进电机控制及驱动电路系统。
该系统可分为:控制模块、驱动模块、显示模块、人机交互模块四大部分。
其中采用AT89C51单片机作为控制模块的核心,利用单片机编程实现了对步进电机启动停止、正转反转、加速减速等功能的基本控制。
驱动模块由芯片ULN2003A驱动步进电机工作;显示部分由七段LED共阴数码管组成;人机互换部分由相应的按键实现相应的功能。
通过实际测试表明本设计系统的性能优于传统步进电机控制器,具有结构简单、可靠性高、实用性强、人机接口简单方便、性价比高等特点。
目录1设计原理及方案 (3)1.1 设计原理 (3)1.2 设计方案 (3)1.2.1 方案一 (4)1.2.2 方案二 (5)1.2.3 方案比较及选择 (6)2 设计实现 (7)2.1 主要元器件介绍 (7)2.1.1 四相六线步进电机的介绍 (7)2.1.2 AT89C51单片机芯片介绍 (9)2.1.3 ULN2003芯片介绍 (10)2.1.4 LED七段数码管介绍 (10)2.2 步进电机控制及驱动系统电路设计实现 (11)2.2.1 硬件设计 (11)2.2.2 软件设计 (14)3 电路调试 (15)3.1 软件的仿真 (15)3.2 硬件电路的调试 (16)4 数据分析及总结 (17)4.1 测试数据及说明 (17)4.2 总结 (18)参考文献 (19)附录 (20)1设计原理及方案1.1 设计原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
基于AT89C51单片机控制的步进电机运行及检测 (2)
题目:基于Proteus的LM016L液晶显示器的仿真学生姓名:闫少卿学生学号: 0908020248 系别:电气信息工程学院专业:自动化届别: 2013届指导教师:苗磊电气信息工程学院2012年5月基于Proteus的LM016L液晶显示器的仿真学生:闫少卿指导教师:苗磊电气信息工程学院自动化专业1课程设计的任务与要求1.1 课程设计的任务利用Proteus的51单片机设计并实现LM016L液晶显示器的显示功能。
通过本次设计了解并掌握LM016L液晶显示器结构及其使用方法。
1.2 课程设计的要求使用LM016L显示两行字符,当按下K1开关时,电机正转,液晶显示器第一行显示字符为“start zheng”,第二行显示为电机正转所运行的步数;当按下K2开关时,电机反转,液晶显示器第一行显示“start fan”,第二行显示为电机反转所运行的步数。
1.3 课程设计的研究基础该设计包括硬件和软件设计两部分。
硬件部分主要包括:单片机AT89C51、LM016L液晶显示器。
软件部分包括:基于51单片机的汇编语言程序。
设计中的相关研究如下:(1)单片机AT89C51:AT89C51是一种带4K字节闪烁可编程可擦除只读存储器的低电压、高性能CMOS8位微处理器,俗称单片机。
该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
将多功能8位CPU和闪烁存储器组合在单个芯片中,是一种高效微控制器。
(2)LM016L液晶显示器:LM016L液晶显示器采用HD44780控制器。
HD44780具有简单而功能较强的指令集,可以实现字符移动、闪烁等功能。
[2]2 LM016L液晶显示器显示系统方案制定2.1 方案提出方案一:利用单片机AT89C51来控制数码管的运行,按下按钮可实现数码管的显示。
将程序写入后,当按下正反转开关时数码管单个显示字符和电机运行的拍数,组合起来构成所需要的数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制系统项目课程设计论文题目:基于AT89C51单片机步进电机控制姓名陈悟宇学号 201103820129年级 2011级专业飞行器制造工程系(院)机械工程学院指导教师徐波2014年5月23日目录摘要: (2)1 设计要求 (2)2 步进电机原理 (2)2.1 步进电机工作方式 (2)2.2 框图设计 (4)2.3 知识点 (4)3 硬件设计 (5)3.1 电路原理 (5)3.2 驱动电路 (6)3.3 晶振电路 (6)3.4 总体电路图 (7)4 软件设计 (7)4.1 程序流程图 (7)4.2 程序清单 (9)5 遇到的问题及解决方案 (9)5.1 问题 (9)5.2 解决方法 (9)参考文献 (9)设计心得体会 (10)附录一.原器件清单 (11)附录二.Proteus 仿真图 (12)附录三.ULN2003作用及引脚介绍 (13)附录四.程序清单 (14)基于AT89C51单片机步进电机控制摘要:步进电机是机电一体化的关键产品之一,被广泛应用在各种自动化控制系统中。
由于其精度高、体积小、控制方便灵活,因此在智能仪表和位置控制中得到了广泛的应用。
大规模集成电路的发展以及单片机技术的迅速普及,为设计功能强,价格低的步进电机控制驱动器提供了先进的技术和充足的资源。
关键词:步进电机单片机控制1设计要求(1)最小系统:选择AT89C51单片机为核心元件构成系统。
有时钟产生电路和复位电路。
(2)控制电路:C语言编程控制。
由操作者根据相应的工作需要进行操作。
(3)驱动部分:对单片机输出的脉冲进行功率放大,从而驱动电机转动.(4)主要功能:实现步进电机的正转,反转,加速,停转。
2步进电机原理2.1步进电机工作方式由于步进电机是一种将电脉冲信号转换成直线或角位移的执行元件,它不能直接接到交直流电源上,而必须使用专业设备----步进电机控制驱动器,典型步进电机控制系统如图1所示控制器可以发出脉冲频率从几赫兹到几千赫兹可以连续变化的脉冲信号,它为环形分配器提供脉冲序列,环形分配器的主要功能是把来自控制环节的脉冲序列按一定的规律分配后,经过功率放大器的放大加到步进电机驱动电源的各项输入端,以驱动步进电机的转动,环形分配器主要有两大类:一类是用计算机软件设计的方法实现环形分配器要求的功能,通常称软环形分配器。
另一类是用硬件构成的环形分配器,通常称硬环形分配器。
功率放大器主要对环形分配器的较小输出信号进行放大,以达到驱动步进电机的目的,步进电机的基本控制包括转向控制和速度控制两个方面。
从结构上看,步进电机分为三相单三拍、三相双三拍和三相六拍3种,其基本原理如下:(1)换相顺序的控制通电换相这一过程称为脉冲分配。
例如,三相步进电机在单三拍的工作方式下,其各相通电顺序为A→B→C→A,通电控制脉冲必须严格按照这一顺序分别控制A、B、C相的通断。
三相双三拍的通电顺序为AB→BC→CA→AB,三相六拍的通电顺序为A →AB→B→BC→C→CA→A。
(2)步进电机的换向控制如果给定工作方式正序换相通电,步进电机正转。
若步进电机的励磁方式为三相六拍,即A→AB→B→BC→C→CA→A。
如果按反序通电换相,即A→AC→C →CB→B→BA→A,则电机就反转。
其他方式情况类似。
(3)步进电机的速度控制如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整送给步进电机的脉冲频率,就可以对步进电机进行调试。
(4)步进电机的起停控制步进电机由于其电气特性,运转时会有步进感。
为了使电机转动平滑,减小振动,可在步进电机控制脉冲的上升沿和下降沿采用细分的梯形波,可以减小步进电机的步进角,跳过电机运行的平稳性。
在步进电机停转时,为了防止因惯性而使电机轴产生顺滑,则需采用合适的锁定波形,产生锁定磁力矩,锁定步进电机的转轴,使步进电机转轴不能自由转动。
(5)步进电机的加减速控制在控制系统中,通过实验发现,如果信号变化太快,步进电机由于惯性跟不上电信号的变化,这时就会产生堵转和失步象。
所有步进电机在启动时,必须有加速过程,在停止时波形有减速过程。
理想的加速曲线一般为指数曲线,步进电机整个降速过程频率变化规律是整个加速过程频率变化规律的逆过程。
选定的曲线比较符合步进电机升降过程的运行规律,能充分利用步进电机的有效转矩,快速响应性好,缩短了升降速的时间,并可防止失步和过冲现象。
实际的控制系统中,根据负载的情况来选择步进电机。
步进电机能响应不失步的最高步进频率称为“启动频率”,于此类似“停止频率”是指系统控制信号突然关断,步进电机不冲过目标位置的最高步进频率。
电机的启动频率、停止频率和输出转矩都要和负载的转动惯量相适应,有了这些数据,才能有效地对电机进行加减速控制。
加速过程有突然施加的脉冲启动频率f0。
步进电机的最高启动频率(突跳频率)一般为0.1KHz到3~4KHz,而最高运行频率则可以达到N*102KHz,以超过最高启动频率的频率直接启动,会产生堵转和失步的现象。
2.2框图设计根据C51芯片的工作方式设计总体设计方框图如图 2 所示。
AT89C51图2总体设计方框图2.3知识点●本项目需要通过学习和查阅资料,掌握和了解如下知识点:●+5V电源原理及设计●单片机复位电路工作原理及设计●单片机晶振电路工作原理及设计●ULN2003大电流驱动阵列●AT89C51单片机引脚●单片机汇编语言及程序设计3硬件设计本设计的硬件电路只要包括控制电路、最小系统、驱动电路三大部分。
最小系统只要是为了使单片机正常工作。
控制电路只要由开关和按键组成,由操作者根据相应的工作需要进行操作。
显示电路主要是为了显示电机的工作状态和转速。
驱动电路主要是对单片机输出的脉冲进行功率放大,从而驱动电机转动。
3.1电路原理基于AT89C51单片机进电机速度控制原理如图3所示。
步进电机的驱动信号必须为脉冲信号,转动的速度和脉冲的频率成正比。
步进电机步进角为7.5度,一圈360度,需要48个脉冲完成。
A组线圈对应 P2.4B组线圈对应 P2.5C组线圈对应 P2.6D组线圈对应 P2.7正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度)通过ULN2003构成比较多的驱动电路,电路图如图3所示。
通过单片机的P1.0~P1.3输出脉冲到ULN2003的1B~4B口,经信号放大后从1C~4C口分别输出到电机的A、B、C、D相。
图3步进电机驱动电路3.3晶振电路晶振电路如图4所示:图4晶振电路把各个部分的电路图组合成总电路图,如图 5所示。
图5总体电路图4软件设计4.1程序流程图程序分主程序和中断程序,采用C语言编程,计时采用延时程序。
步进电机从静止到高速转动需要一个加速的过程,否则电机很容易被“卡住”。
在此程序中,当转速参数speedlevel为2时,可以算出,此时步进电机的转速为1500RPM,而当转速参数speedlevel 1时,转速为3000RPM。
当步进电机停止,如果直接将speedlevel 设为1,此时步进电机将被“卡住”,而如果先把speedlevel 设为2,让电机以1500RPM 的转速转起来,几秒种后,再把speedlevel 设为1,此时电机就能以3000RPM的转速高速转动,这就是“加速”的效果。
4.2程序清单程序清单见附录。
5遇到的问题及解决方案5.1问题(1).焊接的线路有问题(2).电动机不转(3).要求正转出现发转5.2解决方法(1)检查电路并重新焊接。
(2)ULN2003的驱动直接用单片机系统的5V电压,可能力矩不够大,加大驱动电压到12V。
(3)ABCD接线反向。
参考文献[1] 周向红. 51系列单片机应用与实践教程[M]. 北京:北京航空航天大学出版社,2008.[2] 马淑华,王凤文,张美金.单片机原理与接口技术[M].北京:北京邮电大学出版社,2007.[3] 张靖武,周灵彬.单片机系统的PROTEUS设计与仿真[M].北京:电子工业出版社,2007.[4] 杨居义,杨尧,王益斌,杨晓琴. 单片机课程设计指导 [M]. 清华大学出版社.2009.[5] 匿名.ULN2003.[DB/OL]./view/1584257.htm,2013.设计心得体会设计通过分析步进电机结构、工作原理,查阅步进电机控制系统的相关科技文献,遵循实用、简单、可靠和低成本的原则,设计了一种既可用于精度要求不高,但控制需完备的场合。
对本次设计,有以下结论:采用单片机为控制核心,利用其强大的功能,把计算机与集成电路有机的结合起来,组成一个操作方便、交互性强的控制系统。
而且整个系统所包含的技术几乎包括了现本科学校控制专业所要求的知识,有利于实践教学取得最大效果。
系统软件采用结构化设计,具有易维护性,根据用户新的要求,对软件系统进行少量的修改,使系统功能得到一定程度的提高。
课程设计过程中,用到了大量的理论知识,我们通过查资料、上网搜索来获取。
这样我们不仅复习了课本上的基本理论知识,也学到了很多新的知识,通过设计,使我懂得了理论与实际相结合是很重要的,只有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,才能提高自己的实际动手能力和独立思考的能力。
本人深知该课程还不够好,由于软件和硬件的各方面原因,系统的应用讨论不够,精度还有待于进一步提高。
可以肯定,随着技术的不断发展,步进电机的控制应用前景将越来越宽阔,而其控制系统也将向着智能化和网络化的方向发展。
本课程设计的研究和探讨还远远不够,还要在现在的基础上,不断吸取新的技术和方法,进一步深化研究深度,争取有更多的收获。
附录一.原器件清单元件名称型号数量用途单片机AT89C51 1 控制核心步进电机- 1 实验核心驱动器UNL2003 1 放大信号电源Vcc 5V/12V 1/1 提供电源电容30pF 2 晶振电路电解电容20μF 1 复位电路按键- 1 控制开关电阻1KΩ 1 保护电路附录二.Proteus 仿真图附录三.ULN2003作用及引脚介绍UNL2003[5]作用:ULN2003是大电流驱动阵列,多用于控制电路中,可直接驱动继电器等负载。
引脚1:CPU脉冲输入端,端口对应一个信号输出端。
引脚2:CPU脉冲输入端。
引脚3:CPU脉冲输入端。
引脚4:CPU脉冲输入端。
引脚5:CPU脉冲输入端。
引脚6:CPU脉冲输入端。
引脚7:CPU脉冲输入端。
引脚8:接地。
引脚9:集电极对地接通。
引脚10:脉冲信号输出端,对应7脚信号输入端。
引脚11:脉冲信号输出端,对应6脚信号输入端。
引脚12:脉冲信号输出端,对应5脚信号输入端。
引脚13:脉冲信号输出端,对应4脚信号输入端。
引脚14:脉冲信号输出端,对应3脚信号输入端。