移动式驾车机总体及机架设计
自动导引小车AGV的结构设计及自主移动规划
自动导引小车AGV的结构设计及自主移动规划一、概述自动导引小车(AGV,Automated Guided Vehicle)是一种具备自主导航、定位、移动、避障以及作业执行等功能的智能移动设备。
在现代工业生产和物流领域,AGV以其高效、灵活、精确的特点,被广泛应用于物料搬运、仓储管理、生产线自动化等场景,有效提升了生产效率和物流管理水平。
AGV的结构设计是其实现自主移动和作业功能的基础。
一个典型的AGV通常由车身、驱动系统、导航系统、传感器系统、控制系统以及作业执行机构等部分组成。
车身是AGV的承载平台,驱动系统负责提供动力并实现移动,导航系统确保AGV能够按照预设路径或指令进行自主导航,传感器系统用于感知周围环境并实现避障,控制系统则负责协调各部分的工作,实现AGV的自主移动和作业执行。
自主移动规划是AGV实现高效、准确移动的关键。
AGV需要通过路径规划算法,根据任务需求、环境信息以及自身状态,规划出最优的移动路径。
同时,AGV还需要具备实时避障能力,能够在遇到障碍物时及时调整移动路径,确保安全、顺畅地完成作业任务。
对AGV的结构设计及自主移动规划进行研究,不仅有助于提升AGV的性能和稳定性,还有助于推动工业生产和物流领域的自动化、智能化发展。
本文将从AGV的结构设计和自主移动规划两个方面进行深入探讨,为AGV的研发和应用提供有益的参考和借鉴。
1. AGV的定义与功能自动导引小车(Automated Guided Vehicle,简称AGV)是一种装备有电磁或光学等自动导引装置,能够沿规定的路径自动行驶,具有安全保护以及各种移载功能的运输车。
AGV是现代物流系统中的一种高效、灵活、智能的运输设备,广泛应用于制造业、仓储业、港口、机场等领域。
运输功能:AGV能够根据系统指令,自动将物料或产品从起点运输到终点,完成物料的搬运工作。
AGV的载重能力可以根据实际需求进行选择,从几百公斤到几吨不等。
导航功能:AGV通过内置的导航系统,如激光导航、电磁导航、视觉导航等,实现精确的路径规划和跟踪。
用于移动式起重机的车辆框架和移动式起重机的制作方法
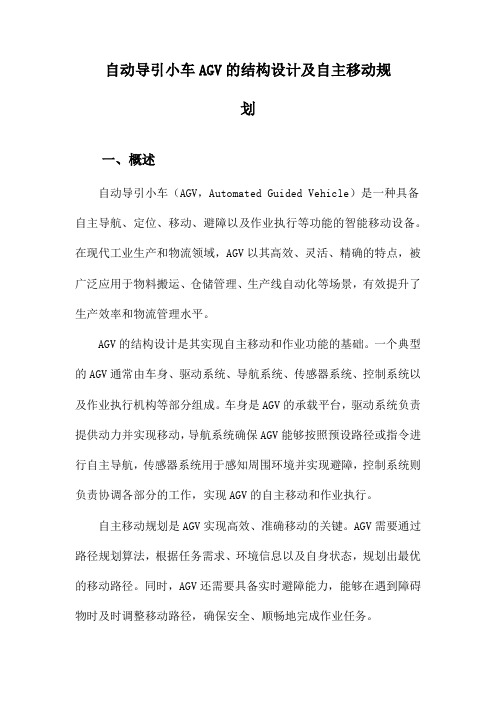
图片简介:本技术涉及一种用于移动式起重机的车辆框架和移动式起重机,所述车辆框架具有框架,特别是具有在纵向车辆方向上延伸的中间框架部分,还具有用于支撑装置的至少一个滑动梁箱,该至少一个滑动梁箱可释放地螺栓连接到所述框架的后部的正端面,其中所述框架与所述滑动梁箱之间的螺栓连接部包括沿所述纵向车辆方向延伸的至少两个销和关于所述车辆方向横向延伸的至少两个销。
技术要求1.一种用于移动式起重机的车辆框架,所述车辆框架具有框架,特别是具有在纵向车辆方向上延伸的中间框架部分,还具有用于支撑装置的至少一个滑动梁箱,所述至少一个滑动梁箱可释放地螺栓连接到所述框架的后部的正端面,其特征在于,所述框架与所述滑动梁箱之间的螺栓连接部包括沿所述纵向车辆方向延伸的至少两个销和关于所述车辆方向横向延伸的至少两个销。
2.根据权利要求1所述的车辆框架,其特征在于,在所述纵向车辆方向上延伸的所述销垂直地位于所述框架的或所述滑动梁箱的相应接触表面的正端面上。
3.根据权利要求1或2所述的车辆框架,其特征在于,在沿所述纵向车辆方向上延伸的至少一个所述销周围的区域中的表面用作力传递表面,并且所述力传递表面优选具有在所述至少一个所述销周围的区域中的接触表面,并且在所述螺栓连接状态下对应的对立接触表面与所述接触表面接触。
4.根据前述权利要求中任一项所述的车辆框架,其特征在于,所述滑动梁箱的所述接触表面由与所述框架的轮廓形式相对应的转接板形成。
5.根据前述权利要求中任一项所述的车辆框架,其特征在于,在所述纵向车辆方向上延伸的所述至少两个销布置在所述框架的或所述滑动梁箱的顶弦区域处。
6.根据前述权利要求中任一项所述的车辆框架,其特征在于,关于所述车辆方向横向延伸的所述至少两个销被布置在所述框架的或所述滑动梁箱的底弦区域处。
7.根据权利要求5或6所述的车辆框架,其特征在于,所述顶弦的销之间的距离不同于所述底弦的销之间的距离;所述顶弦的销之间的距离尤其大于所述底弦的销之间的距离。
移动式液压升降小车的结构设计
嵊州市中等职业技术学校金樟源[摘要]本文根据市场上常见的大型升降平台,创新设计了一款移动式液压升降小车,该车实现了体型小、移动方便、高度可调等功能。
文章首先介绍了移动式液压升降小车的工作原理,利用PRO/E 软件完成主要零部件设计,在此基础上完成移动式液压升降小车的整机装配,最后阐述了液压升降小车的市场前景。
[关键词]升降小车结构设计PRO/E0.引言目前市场上大多数的升降机都是大型的单向移动或固定式升降平台,很少有小型的移动升降机,而现在工厂车间里,有很多地方需要用到小型的移动升降机。
如果减小机构做成由液压驱动且能在不同高度下进行快速、慢速的前进、后退行走的小车,则可利用它载重和抬升工件到指定位置便于加工,从而减少工人的劳动强度[1]。
本文针对上述问题设计了一款移动式液压升降小车,利用它进行车间货物搬运或生产线作业。
本文设计的这个小车安有一个电机,可以由PLC 控制用于生产线作业,实现全自动化控制[2][3]。
在生产线作业时,把工件固定在升降平台上,小车将工件运到指定位置后,液压缸将顶板抬升至指定的位置进行加工,加工完毕后,小车退回原来位置进行下一次加工。
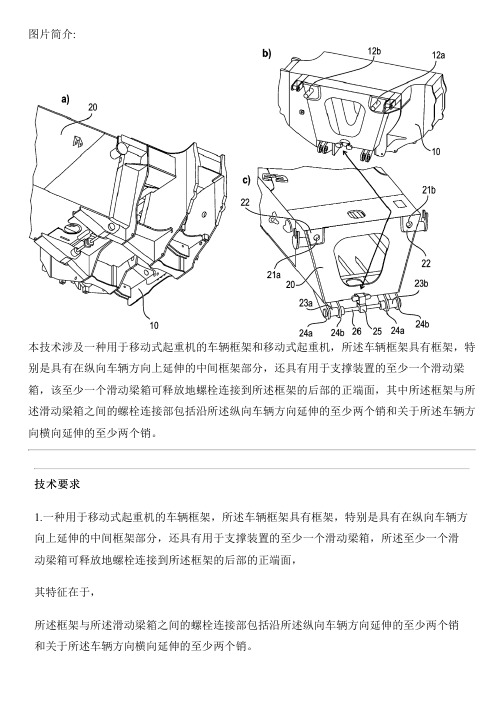
1.液压升降小车的工作原理本款小车的移动主要是靠底盘的减速电机控制前后移动,减速电机主要通过降低转速增大转矩,可以根据工件重量的不同来调节速度,将工件送到指定的位置进行加工。
抬升重物主要是靠液压缸来实现,液压油由叶片泵形成一定的压力,经滤油器、电磁换向阀、节流阀、液控单向阀、进入液压缸下端,使液缸的活塞向上运动,抬升平台提升工件。
液缸的活塞向下运动(即工件下降)。
液压油经换向阀进入液缸上端,液缸下端回油经平衡阀、液控单向阀、节流阀、电磁换向阀回到油箱。
为使重物下降平稳,制动安全可靠,在回油路上设置平衡阀,平衡回路、保持压力,使下降速度不受重物而变化,由节流阀调节流量,控制升降速度。
结构简图如图1 所示。
1—升降平台;2—液压缸;3—底板;4—车轮;5—滑块;6—剪叉杆;7—滑动装置;8—电机图1 移动式液压升降小车结构示意简图 2.移动式液压升降小车的主要零部件设计移动式升降小车主要由液压缸、减速电机、滑块、车轮、底板、升降前台、剪叉杆等组成。
行走式小型液压升降机机架和小车设计说明书
目录摘要 (5)关键词 (5)1 前言 (6)2 系统工作原理及方案的确定 (8)3 有轨小车运行机构计算 (9)3.1 确定机构运行方案 (9)3.2 车轮与轨道并演算其强度 (9)3.3 运行阻力计算 (10)3.4 选电动机 (10)3.5 选择减速器 (10)3.6 验算运行速度和实际所需功率和启动时间 (13)3.7 按起动工况校核减速器功率 (14)3.8 验算启动不打滑条件 (14)3.9 选择高速轴联轴器及制动轮 (15)3.10 选低速轴联轴器 (16)3.11 浮动轴设计 (16)4 回转运行机构的计算 (17)4.1 确定回转机构的总体方案 (17)4.2 轨道直径计算 (17)4.3 中心枢轴计算 (17)4.4 选用工业车轮 (18)5 齿轮传动设计 (18)5.1 选定齿轮类型、精度等级和齿数 (18)5.2 按接触强度设计 (19)5.3 按齿根弯曲强度设计 (20)5.4 几何尺寸计算 (21)5.5 验算 (21)6 起重机的安全技术 (21)7 结论 (22)参考文献 (23)致谢 (23)行走式小型液压升降机机架和小车设计摘要:随着社会的发展,机械将会越来越取代人力,这也是机械行业飞速发展的后果,在机械的发展历史中,新机械的发明有着举足轻重的作用。
但是,那些很久以前就被利用生产并一直延续到今天的机械,更是起着不可替代的作用,起重机就是一例。
起重机的发展就像其他机械一样,从开始的简单到现在的复杂,从以前的机械动力到现在的电力动力,从以前的人工操作到现在的电脑操作甚至智能操作。
本设计就传统的起重机说起,一直到现在以及将来的发展。
物流系统技术是先进制造技术中的重要组成部分,从其广义内涵分析可以看出它已从以前简单的物料搬运发展到今天的集机械设计、计算机科学、管理学和自动化控制技术等于一身的综合技术。
关键词:起重机;卷筒;卷筒轴;滑轮组The design of Track small-sized hydraulic crane frame and carAbstract:Along with society's development, the machinery will be able more and more to substitute for the manpower, this also will be the mechanical profession rapid development consequence, in the machinery substitution manpower development history, the new machinery invention has the pivotal function. But.These very for a long time on and continue continuously using the production to today machinery, is playing the role which cannot be substituted, the hoist is an example. The hoist development is likely same on other machineries, from starts simply until present complex, from beforehand manpower to present electric power, from beforehand manual control to present computer operation even intelligence operation. This design mentions on the traditional hoist, continuously to present as well as future development.The design instruction booklet has mainly designed 8 ton hoist reels, the reel axis, as well as the block and tackle. Reel as well as the reel axis design is most main, this design has made the introduction with emphasis. Because other parts the length is limited, only makes the analysis slightly.Key words:Hoist; Reel; Reel axis; Block and tackle1 前言起重机又称绞车,是起重垂直运输机械的重要组成部分,配合井(门)架、桅杆、滑轮组等辅助设备,用来提升物料、安装设备等作业。
地铁车辆段移动式架车机与固定式架车机的运用对比分析

地铁车辆段移动式架车机与固定式架车机的运用对比分析摘要:本文主要介绍地铁车辆段移动式架车机与固定式架车机在结构、运用以及检修方面的不同,并对其各自的优缺点作出对比分析。
关键词:地铁车辆段;移动式架车机;固定式架车机,对比1概述随着地铁、轻轨以及有轨电车在国内的快速发展,架车机的应用越来越普及,它可有效地用于地铁列车整列转向架的更换、车辆的拆卸、装配以及维修。
目前地铁行业所使用的架车机主要分为移动式架车机与固定式架车机,本文将郑州地铁1号线郑东车辆段固定式架车机与2号线城南车辆段移动式架车机做对比,分析比较二者在结构、运用以及检修等方面的不同之处,并对其各自的优缺点作出分析,以方便对后续线路架车机的选用做出参考。
2设备结构对比2.1固定式架车机郑州地铁1号线郑东车辆段使用的为青岛四方生产的固定式架车机,其整体安装在地下基础坑内,主要由机械系统结构和电气系统结构组成。
其中机械结构主要有钢结构部分、转向架架车单元、车体架车单元以及地坑盖板等部分组成。
其单坑机械结构如图1示:图1:固定式架车机单坑机械结构钢结构部分主要由架车单元承载底座、轨道桥(辅助轨)、举升单元安装座等组成,其中承载底座是转向架单元和车体单元的安装和承载部件,轨道桥(辅助轨)与库内的钢轨平齐,确保列车的顺利通过。
在轨道桥上装有车轮定位装置,用于判断车辆的停放位置是否正确。
每套转向架架车单元主要包括:4个转向架举升组成、2条举升轨道梁、1套驱动系统和系统安装座以及1套跟随盖板。
车体架车单元主要由车体举升柱、导向箱体、托头、丝杆/螺母传动系统组成等组成。
固定式架车机电气系统主要由软件和硬件两大部分组成,其中软件主要包括工控机软件、触摸屏软件和PLC软件,硬件主要包括主控制柜、主操作台、12个分控柜、24个本地控制器和现场电气设备组成。
图2:固定式架车机主控台2.2移动式架车机郑州地铁2号线城南车辆段的架车机为青岛四方生产的移动式架车机,主要由机械和电图3:移动式架车机机械结构气系统组成,其中机械系统结构主要包括机架、承载构架、托头、走行机构、驱动部分等。
最新毕业设计-移动龙门吊起吊装置设计

毕业设计-移动龙门吊起吊装置设计关键词:移动式龙门起重机是一种应用广泛的起重机械,常用于建筑工地、码头和工厂起重运输重物。
本设计的主要任务是设计升降机构、移动机构和自锁机构。
设计采用许用应力法和计算机辅助设计法。
在设计过程中,龙门起重机的强度、疲劳强度、稳定性、刚度通过使用龙门起重机的每个结构尺寸的估计数据来粗略地检查和计算。
在所有上述因素满足材料允许要求后,绘制龙门起重机小车结构图,然后计算移动小车的功率和升降机构的功率,然后用该功率选择电机。
以电机功率和额定起重量为技术参数,计算选择联轴器、轴承等部件。
如果失败,重复上述步骤,直到通过。
同时,在设计中参考了各种材料。
完成设计的文献.通过对该设计方案的反复考虑,认真讨论,反复检查,力求设计合理;同时,通过计算机辅助设计方法,充分发挥计算机强大的辅助功能,力求高效设计。
关键词:龙门起重机;制度设计;钩子;摘要:采用许用应力法进行设计,并对移动式龙门起重机的金属结构进行计算机辅助设计移动式龙门起重机设计.设计首先用估算的数据对移动式龙门起重机的起重机结构尺寸,强度,疲劳强度,稳定性,刚度进行粗略的校核计算,这些因素必须是材料允许的要求,得出移动式龙门起重机结构.然后计算主梁和边梁的重量荷载,然后荷载移动龙门起重机这一准确的强度和刚度验算.如果未通过,然后重复上述步骤,直到批准.因为学校的开始是移动式龙门起重机被列在草案中,在设计手册中没有记录,只有学校的精华记录了移动式龙门起重机.的过程参考对各种类型的设计信息,使用各种手段,使用各种条件来完成设计.经过这个设计,各种各样的设计,以及对核的反复讨论,都试图设计出合理的.穿过计算机辅助设计和创新参考的先进经验.键文字:移动式龙门起重机;设计的机构;钩子;移动1 .前言龙门起重机是一种在高架轨道上运行的龙门起重机,也称为天车。
龙门吊的龙门架沿两侧高架上铺设的轨道纵向运行,提升小车沿龙门架上铺设的轨道横向运行,形成一个矩形的工作范围,使得龙门架下方的空间可以被充分利用来提升物料,而不受地面设备的阻碍。
AGV小车设计方案改

机电一体化课程设计自动导引小车(AGV)设计方案小组成员:褚亚鹏柯健镪孙登强指导老师:***2014.6.19目录一、绪论 ............................................................................................. - 4 -1.1 AGV概述 ................................................................................. - 4 -1.2 AGV国内外研究现状.............................................................. - 6 -1.3 AGV的应用范围: ................................................................. - 9 -1.4 AGV的发展趋势分析:........................................................ - 11 -1.5 AGV的市场前景分析:........................................................ - 12 -二、总体方案设计 ........................................................................... - 14 -2.1 设计方案概述: ..................................................................... - 14 -2.2 传感器部分初步设计:.......................................................... - 14 -2.3 机械结构及驱动部分初步设计: .......................................... - 14 -2.4 控制部分初步设计:.............................................................. - 14 -三、传感器部分设计........................................................................ - 18 -四、机械结构及驱动部分设计 ........................................................ - 20 -4.1车体的设计: .......................................................................... - 20 -4.2车轮及转向装置选择:........................................................... - 20 -4.3电机的选择: .......................................................................... - 20 -4.4驱动部分校核计算:............................................................... - 24 -4.5蓄电池的选择: ...................................................................... - 25 -4.6总体机械结构设计及建模: ...................................................... - 27 -五、控制部分设计 ........................................................................... - 30 -5.1电源模块: .............................................................................. - 30 -5.2驱动模块 .................................................................................. - 30 -5.3循迹模块 .................................................................................. - 32 -5.4避障模块 .................................................................................. - 33 -5.5主控制模块 .............................................................................. - 34 -六、项目总结与感悟........................................................................ - 37 -七、参考文献 ................................................................................... - 39 -八、附录 ........................................................................................... - 40 -8.1 车体结构ANSYS仿真报告: .................................................... - 40 -Project ............................................................................................... - 40 -Contents ......................................................................................... - 41 -Units ............................................................................................... - 41 -Model (C4) ...................................................................................... - 41 -Geometry..................................................................................... - 41 -Coordinate Systems ..................................................................... - 53 -Connections ................................................................................. - 53 -Mesh ............................................................................................ - 67 -Static Structural (C5) ....................................................................... - 68 -Solution (C6) ................................................................................ - 71 -Material Data .................................................................................. - 73 -Structural Steel ............................................................................ - 73 -8.2 单片机控制程序: .................................................................... - 75 -一、绪论1.1 AGV概述(1)AGV的简介:根据美国物流协会定义,AGV(Automated Guided Vehicle)是指装备有电磁或光学导引装置,能够按照规定的导引路线行驶,具有小车运行和停车装置、安全保护装置以及具有各种移载功能的运输小车。
AGV小车设计方案及应用

欢迎阅读AGV小车设计及应用1.AGV小车的发展背景在现代化工业的发展中,提倡高效,快速,可靠,提倡将人从简单的工作中解放出来。
机器人逐渐替代了人出现在各个工作岗位动需要有转向装置。
转向装置的结构也有三种:1)前轮转向后轮驱动三轮车型。
车的转向和驱动分别由两个不同的电动机带动,车体的前部为转向车轮,车体后部为驱动电机驱动的两个轮。
其结构简单、成本低,但定位精度较低。
前轮转向后轮驱动三轮车型2)差速转向式四轮车型。
车体的中部有两个驱动轮,由两个电机分别驱动。
前后部各有一个转向轮(自由轮)。
通过控制中部两个轮的速度比可实现车体的转向,并实现前后双向行驶和转向。
这种方式结构简单,定位精度较高。
差速转向式四轮车型式:t RV V r l ∆-=∆θ③ AGV 小车在做圆弧运动时,在X 轴上的变化量是ΔX ,在Y 轴上的变化量是ΔY ,ΔX 、ΔY 与转弯半径d 的关系为:θ∆=∆sin d X ④)cos 1(θ∆-=∆d Y ⑤将①式代入④⑤式,可以得出ΔX 、ΔY 与左右轮运行速度的关系式:θ∆+=∆-sin 2rl r l V V V V R X ⑥ )cos 1(2θ∆-+=∆-rl r l V V V V R Y ⑦ 所以,通过改变V r 及V l 可以实现AGV 小车纠偏,转向等运动控息媒介物,AGV 通过检测出它的信息而得到导向的导引方式,如电磁导引、色带导引、磁带导引(又称磁性导引)等。
色带导引示意图上图为光学导引示意图,这种导引方式是在地面上连续敷设一条带颜色的带子,在车辆的底部中央安装光源以及在两边安装相同的色标传感器(如欧姆龙产品E3X-DA □AN-S ),它们同时检测色带反射回来的色度值,并将色度值转换成模拟量传送给AGV小车的中央控制系统--PLC。
当AGV小车运行在正确的运行轨道上时,两放大器反馈给PLC模拟量的值相同,当AGV小车偏离轨道时,两放大器反馈给PLC的值便有差别,PLC根据两模拟量的差值便能判断出AGV小车偏离运行轨道的程度及方向,并通过控制运动控制器使AGV小车往正确的轨道运行。
2.AGV系统结构设计以及动力学建模型

2.AGV系统结构设计以及动力学建模型内容提要:设计了一辆前后轮分独立驱动的小车,后轮用步进电机驱动,实现动力源,前轮由私服电机驱动,实现转向。
并建立其动力学方程。
2.1 AGV系统结构设置所设计的AGV小车的模型如图2.1所示。
小车采用前后轮独立驱动的模式,后轮由电机带动齿轮传动,给与合适的动力源。
前轮有电机带动直推轴焊接横轴来实现转向。
四轮结构与三轮结构相比有较大的负载能力和平稳性。
1.蓄电池组2. 伺服交流电动机3. 激光扫描仪4. 车载控制器5. 无线通讯装置6. 伺服交流电动机7. 减速器8. 驱动车轮图2.1 AGV小车的模型图由于采用了两轮独立驱动差速转动的方式,因此两个驱动车轮的速度的同步性成,成为车辆稳定运行的一个重要指标。
鉴于此,齿轮减速结构与车轮通过柔性连轴器来连接。
2.2 AGV小车的动力学建模自从 A G V问世以来,人们在自动导引车的控制过程中一般满足于基于运动学的控制模型,而很少有人进行基于动力学的控制设计等方面的内容。
事实表明,根据AGV车体动力学模型,可以得到直接的电机输入与行走、导向车轮转速的非线性的耦合关系,将对指导车体机械结构设计、路径规划以及合理的路径跟踪控制规律设计有重要而且深远的意义。
由于 A G V在实际问题中有较严格地面要求的环境中运动,车速较低,限定了加速度的问题,而不会发生明显的车体“上跳”运动的现象出现,故可以在二维空间来研究其动力学模型。
现以我以后轮为电机带动齿轮来实现动力驱动的方式传达力矩,前轮则为由电机直接带动轴的转动从而达到转动的方式来实现转向的AGV为例建立动力学模型。
AGV由车体、蓄电池和充电系统、驱动装置、转向装置、精确停车装置、车上控制器、通信装置、信息采样子系统、超声探障保护子系统、移载装置和车体方位计算子系统等等组成。
“智能”较高的AGV都有车上控制器,它类似于机器人控制器,用以对AGV进行监控。
控制器计算机通过通信系统从地面站接受指令并报告自己的状态。
小型活动式起重机结构设计

小型活动式起重机结构设计一、引言近年来,随着工业化的进程和城市化的发展,建筑工程、物流行业和制造业对起重机的需求越来越高。
针对小型活动式起重机的结构设计,本文将探讨其设计原则和关键要素,旨在提高其安全性和工作效率。
本文将分为以下几个部分进行阐述。
二、载荷计算与机构设计在小型活动式起重机的结构设计中,首先需要进行载荷计算。
这包括考虑预期工作负荷、危险因素等。
根据不同的工作环境和使用需求,可以采用不同的机构设计,如伸缩臂式、刚性臂式或者折叠臂式结构。
机构设计应根据载重需求和工作范围合理选择,确保机器的稳定性和安全性。
三、材料选用与零部件设计在小型活动式起重机的结构设计中,材料的选用和零部件的设计是至关重要的。
应选择高强度、耐磨、耐腐蚀和抗侵蚀的材料,以确保起重机的可靠性和使用寿命。
同时,对于关键零部件的设计,如支架、大臂和小臂等,应进行强度和刚度计算,并选择适当的尺寸和材料,以保证其在工作过程中的可靠性和稳定性。
四、运动控制系统的设计小型活动式起重机的运动控制系统设计是实现起重机稳定、准确工作的关键。
通过选择合适的液压系统或电动系统,以及配备相应的传感器和操控装置,可以实现起重机的顺畅运行和精确控制。
在设计中,应注意运动控制系统的可靠性、灵活性和可调性,以提高起重机的操作性和工作效率。
五、安全保护系统的设计小型活动式起重机作为工程设备,安全性是极为重要的考虑因素。
在结构设计过程中,应考虑采取适当的安全保护措施,如安全装置、限位器、防倾斜装置等。
同时,要为起重机提供完善的安全警示和指导,以确保操作人员的安全和设备的正常运行。
六、结论小型活动式起重机的结构设计是保证其安全性和工作效率的关键。
通过合理的载荷计算与机构设计、材料选用与零部件设计、运动控制系统的设计以及安全保护系统的设计,可以使起重机在不同的工作环境下高效、稳定地完成各项任务。
在未来的发展中,我们可通过借鉴先进技术和经验,进一步提高小型活动式起重机的设计水平,满足不断增长的市场需求。
第五章 起重举升汽车结构与设计
17:22
机械工程学院
第二节 随车起重运输车的结构与设计
支腿跨距的确定
确定的原则:起重装置在臂架强度允许的起重
第二节 随车起重运输车的结构与设计
中置式:起重机安装在汽车车厢中间
起重能力一般在1~3t之间,且采用加
长的大、中型汽车底盘。
起重臂短,轴荷分配易于满足要求,
基本可保持原车的质心位置。
中置式
适于装卸和运输长度整齐的管材、
建筑材料、条状物件及木材等。 后置式:起重机安装在车厢后部
车厢面积的利用率较低。
6、9-流量控制阀
10、12-滤清器 13-液压泵
15-安全阀 16-溢流阀
I、II、III、IV、V-方向控制阀
随车起重运输车液压传动系统
专用汽车结构与设计
17:22
机械工程学院
第二节 随车起重运输车的结构与设计
5. 液压传动系统
作用:将由取力器取出的发动机动力,通过液压泵转换成液压能, 然后经液压系统的各种装置,如液压缸、液压马达等,将液压能转 换成机械能,使随车起重运输车的工作装置作业。
用于带有挂车的随车起重运输车。
车厢面积利用率高,起重臂能完 成汽车和挂车之间的装卸作业。
改变了原车的轴荷分配,使操纵
性变差。
主车架需作改装设计,并且受载
后置式
情况变坏。
专用汽车结构与设计
17:22
机械工程学院
第二节 随车起重运输车的结构与设计
(二)随车起重运输车的结构特点
伸缩臂式 结构组成:如右图所示。 特点:由于起重臂间不能折叠,吊放需
起升高度也随臂长和幅度而变化,通常以最 大起升高度表示。 3. 幅度 指起重臂前端吊钩钩环中心到立柱转台回转 中心线间的距离。随车起重运输车不移位时 的工作范围,由最大幅度和最小幅度决定。
移动式架车机技术部分概要
移动式架车机周聚天下管理目录B1 技术响应表............................ 错误!未定义书签。
B2 技术偏离表........................... 错误!未定义书签。
B3 供货清单 (4)B4 技术建议书目录 (5)B4-1 设备适用的边界条件 (5)1.1 自然气候条件 (5)B4-2 移动式架车机组技术条件 (6)2.1 移动式架车机组采用的规范和适用标准 (6)2.2 移动式架车机组用途及功能 (7)2.3 移动式架车机组主要技术规格及参数 (8)2.4 移动式架车机组组成及系统设置 (9)2.4.1 移动式架车机组组成 (9)2.4.2 移动式架车机组系统设置及主要技术特点 .. 122.5 移动式架车机组各组成部分技术说明 (12)2.5.1 机架及走行系统 (13)2.5.2 升降驱动传动系统 (13)2.5.3 电气同步系统 (13)2.5.4 操作控制系统 (13)2.5.5 安全防护系统 (14)2.6 移动式架车机组的安全与防护措施 (14)2.7 移动式架车机组的环境保护措施 (15)2.8 移动式架车机组设计寿命和各修程周期 (15)2.9 移动式架车机组的接口要求 (15)2.10 移动式架车机组的标识 (16)2.11 移动式架车机组的材料及工艺 (16)B4-3 项目管理及实施 (17)3.1 项目管理 (17)3.1.1 投标人责任范围 (17)3.1.2 项目组织机构及人员 (17)3.1.3 项目执行阶段及工期 (18)3.1.3.1 项目执行阶段 (18)3.1.3.2 工期 (18)3.1.4 项目管理计划、文件及其确认程序 (18)3.1.4.1 投标人应提供项目管理计划 (18)3.1.4.2 管理文件应按一式3份提交 (19)3.1.4.3 文件确认程序 (20)3.2 设计联络及设计审查 (21)3.3 设备制造、包装运输、安装、调试及运行试验 .. 213.3.1 工厂制造和检测 (21)3.3.2 包装运输和仓储 (22)3.3.3 设备安装、调试及运行试验 (22)3.4 监造、检验及验收 (23)3.4.1 监造 (23)3.4.2 出厂验收 (24)3.4.3 设备到货检查和开箱检验 (24)3.4.3.1通知 (24)3.4.3.2开箱检验 (24)3.4.4 接口检验 (25)3.4.5 竣工验收(预验收) (25)3.4.6 最终验收 (25)3.5 技术文件及图纸 (26)3.5.1 技术文件基本要求 (26)3.5.2 投标时提交的技术文件 (27)3.5.3 供货时提交的技术文件 (28)3.5.4 归档 (28)3.5.5 其他文件 (29)3.6 培训 (29)3.6.1 培训方式 (29)3.6.2 培训人员 (29)3.6.3 培训教师及教材 (29)3.6.4 培训计划 (29)3.6.5 培训费用 (30)B4-4 质量保证和售后服务 (30)4.1 质量保证 (30)4.2 设备整机质保期 (31)4.3 质量控制与质量保证体系 (31)4.4 设备可靠性、可用性及可维护性 (31)4.5 质保期内的保证责任 (31)4.6 售后服务 (32)4.7 设备修程、内容及维修体制的建议 (32)B5 项目工期和进度计划 (33)B6 项目管理人员 (33)供货清单设备主机和主要部件一览表外购件一览表随机附件、工具(含专用工具)及测试设备一览表B4 技术建议书B4-1 设备适用的边界条件1.1 自然气候条件海拔高度:≤1200m气候条件:年平均气温: 13.7℃最热月平均气温: 29.8℃极端最高气温: 41.8℃极端最低气温: -20.6℃年平均相对湿度: 70%最湿月份平均最大相对湿度: 90% (该月月平均温度不大于25℃)B4-2 移动式架车机组技术条件2.1 移动式架车机组采用的规范和适用标准GB6067-85《起重机械安全规程》;GB50278-98《起重设备安装工程施工及验收规范》;GB/T15706《机械安全基本概念与设计通则》;GB16754《机械安全急停设计原则》;GB16855.1《机械安全控制系统有关安全部件》;GB/T755《电机基本技术要求》;GB/T14092.5《机械产品环境条件工业腐蚀》;GB/T14093.1《机械产品环境技术要求温热环境用》;GB/T6464《金属及其覆盖层大气腐蚀试验现场试验的一般要求》;GB/T14093.4《机械产品环境技术要求工业腐蚀环境用》;GB/T6807《钢铁工件涂漆前磷化处理技术条件》;GB985《气焊、手工电弧焊及气体保护焊焊缝坡口的基本形式与尺寸》;Q/ZB74《焊接通用技术条件》;GB/T12469-90《焊接质量保证钢熔化焊接头的要求和缺陷分级》;GB11345-89《钢焊缝手工超声波探伤方法和探伤结果分析》;GB191-90《包装储运图示标志》;GB1800《公差与配合总论标准公差与基本偏差》;GB1801《公差与配合尺寸至500mm孔、轴公差带与配合》;GB1803《公差与配合尺寸至18mm孔、轴公差带与配合》;GB1804《公差与配合线性尺寸的未注公差》;GB/T1182《形位公差的符号及其标注》;GB/T1184《形状和位置公差直线度、平面度、圆度、圆柱度、同轴度、对称度、圆跳动和全跳动、平行度、垂直度、倾斜度公差值》;GB1184/T《形状和位置公差未注公差的规定》;GB/T13306-91《标牌》;GB/T4064-1983《电器设备安全设计导则》;GB/T1497-1985《低压电器基本标准》;GB50231-98《机械设备安装工程及验收通用规范》;GB50168-92《电气装置安装工程电缆线路施工及验收规范》;GB50171-92《电气装置安装工程盘、柜及二次回路结线施工及验收规范》。
移动式架车机技术规格及要求

移动式架车机技术规格及要求1.一般要求1.1移动式架车机主要用于架修工程车维修作业,以便对车体转向架及其它部件的维修和更换作业。
1.2所供设备必须是已经过铁路或地铁行业中运用验证,技术成熟的全新产品。
1.3本设备的设计及制造必须符合国际标准IEC、ISO、UIC、中国国家标准GB 或铁道部标准及规范。
1.4设备整机设计使用寿命 30 年。
2.主要要求2.1供货数量共1组架车机(由4 台架车机和1 个控制操作台构成)。
2.2工作自然条件深圳属于亚热带气候,平均温度22.2℃,平均相对湿度79%,最寒冷月极端最低温度0.2℃,相对湿度11%,最热月温度为+38.7℃,相对湿度100%。
➢海拔高度:不超过1200m➢环境温度:-5℃~+40℃(遮阴处)➢相对湿度:最湿月平均最大相对湿度不大于95%➢降水量:年平均降水量: 1933.3 mm最大日降水量: 303.1 mm年降雨天数(>0.1mm): 146天最长持续降雨天数: 20天平均雷雨天数: 69.6天➢空气中的污染物:主要是酸雨和盐雾。
因此所有设备须能适应空气内含有相当大的湿气、且含有盐份和腐蚀性物质的亚热带气候条件,能防虫害(尤其是白蚁和啮齿类动物)、防霉。
2.3技术要求2.3.1设备基本功能要求1)每组架车机能同步架起 1 辆工程车。
2)移动式架车机应配有走行轮,可在车间内地面上人工移动,还可通过起重机吊装。
3)具有运行高程显示、超差自动调整、超限停机报警等功能。
4)同组架车机同步升降,能在升降程内任意高度停止,以进行车下作业。
5)控制系统必须具备完善的联锁控制功能,确保车体同步升降的协调控制。
2.3.2主要结构及功能1)移动式架车机由机架、传动装置、托架、走行装置及电气控制和操作系统组成。
2)机架:结构刚性好,方便维修保养。
每台移动式架车机还可通过起重机吊运。
3)驱动、传动装置:结构简单,无异常振动及噪音,受力状态好,维修保养方便。
物流园区AGV车体框架结构设计方案(DOCX 35页)

物流园区AGV车体框架结构设计方案(DOCX 35页)1 绪论1.1引言随着我国改革开放的不断开展,我国经济建设和技术应用都得到了高速稳定的发展,自动牵引车应用的地方变得越来越多,从单一的生产制造业发展到各行各业,甚至延伸到排爆等危险的具体工作。
现在国内外都开始了对自动牵引车的系统研发和设计,而自动牵引车选择何种取货方式是其设计时最重要的考虑点之一。
随着自动牵引车行业技术的发展,叉车式自动牵引车由于其结构和操作过于复杂,且应用时通常需要很大的场地,因此并没有得到广泛的使用。
而目前市场上的自动牵引车主流仍是叉车式自动牵引车,我们常见的叉车式自动牵引车多像自动叉车的结构形式,该叉车式自动牵引车移动结构简单,适用于平坦的地面,行走过程稳定,但是同样存在着许多缺陷,最大的问题是叉车式自动牵引车对行走地面要求比较高,在有坡度或者是凹凸不平的道路上行走时极容易打滑;且移动转向的时候需要整个叉车牵引车本体转动,转弯半径较大,占用的行走空间较多。
我们都知道驱动单元是自动牵引车中极为重要的一个构件,因此在整体设计的时候应该考虑驱动结构的适用性,稳定性和可靠性。
为了让潜伏式自动牵引车的各项性能满足其使用要求,我们需要从以下方面要求入手考虑:机动性能好,转弯半径小,牵引能力强,与地面附着力大,稳定可靠性高。
本设计中我们选用潜伏式结构作为自动牵引车的总体结构,其既具备叉车式自动牵引车行走结构简单的优点,又具备叉车牵引车移动过程动作稳定、操作简单的优点;潜伏式自动牵引车能够适用于各种环境下的工作,因此对其进一步的研究是不能忽视的。
1.2自动导引车的发展概况欧美等国家在自动牵引车的技术研究方面一直处于世界的前端,他们单独设立有专门的自动牵引车技术研究小组,且都在努力将自动牵引车的技术推广到各行各业当中。
目前美国的自动牵引车的研发已经取得了突破性的进展,他们成功将该自动牵引车应用到一些危险的环境中实际作业,还有部分自动牵引车甚至开始在战争中崭露头角,比如:iRobot公司的Packbot,Battelle公司的ROCOMP, Remotec公司的MINI Andros 等,其中最典型的是:iRobot公司的Packbot。
自动驾驶小车设计方案及流程
自动驾驶小车设计方案及流程一、整体设计思路。
1. 功能定位。
自动驾驶小车得满足一些基本功能,这就像盖房子打地基一样重要。
它要能在各种道路环境下安全行驶,不管是平坦的大马路,还是有点小坑洼的小道。
而且得能识别交通标志,就像人能看懂红绿灯一样理所当然。
这小车啊,还得有避障功能,可不能像个莽撞的小牛犊似的到处乱撞。
1.2 用户需求。
二、硬件设计。
2.1 传感器系统。
传感器就像是小车的眼睛和耳朵。
摄像头得安排上,而且还不能是一个,多个摄像头就像多双眼睛,可以全方位观察周围情况。
激光雷达也不能少,它就像一个精确的测量员,能精确地测量出与障碍物的距离。
毫米波雷达呢,在恶劣天气下就发挥大作用了,就像在大雾天里的一盏明灯。
2.2 动力系统。
动力系统是小车的心脏。
电动机得选个合适的,功率不能太小,不然就成了小马拉大车,跑起来慢吞吞的。
电池也很关键,续航能力得强,要是开一会儿就没电了,那就成了“巧妇难为无米之炊”了。
2.3 车身结构。
车身结构要坚固,得像钢铁侠的盔甲一样。
但同时又不能太重,太重的话会影响小车的灵活性,就像一个大胖子跳舞,怎么看都别扭。
外观设计也要符合空气动力学,这样跑起来才顺畅,就像鱼儿在水里游一样自在。
三、软件设计。
3.1 控制系统。
控制系统得像一个精明的指挥官。
它要能处理传感器传来的各种信息,然后做出正确的决策。
比如说前面有个障碍物,它得马上决定是减速还是转弯。
这控制系统可不能是个糊涂蛋,必须得精准无误。
3.2 人机交互界面。
人机交互界面得友好。
就像和朋友聊天一样轻松自然。
操作界面要简洁明了,不能让人看着就头疼,像看天书似的。
比如说,启动、停止这些功能的按钮要很容易找到,让用户可以轻松上手,不要搞得太复杂,那可就“画蛇添足”了。
四、测试与优化。
4.1 测试环节。
测试可不能马虎,要像考试检查试卷一样认真。
在不同的环境下测试,像晴天、雨天、白天、晚上都要试试。
还要模拟各种突发情况,看看小车的反应是不是灵敏。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要近半个多世纪以来,世界各国都在努力进行铁路的技术装备和现代化管理的研究,努力推进铁路运输技术的进步,在很多方面取得了突破性的进展。
移动式电动架车机DT105应运而生,它一种不需要动力起运的设备,人工便可推动的、轻便的且具有自动控制同步升降功能的移动式电动架车机。
作为铁道电力机务段必不可少的三大检修设备之一的移动式架车机的安全性问题已越来越引起广大设计者的关注。
设计与制造移动式架车机时,除考虑该机构能简单、安全、方便地架起电力或内燃机车、推出转向架外,还应注意其自身机架的强度与稳定性问题。
本文主要根据工厂实际参观和力学受力分析对机架部分进行优化设计,在设计当中重点是提高移动式架车机机架的稳定性,提高使用寿命和可靠性,以最低的的维修费用,较长的使用周期使移动式架车机具有较高的经济性,机架是移动式架车机的承载基体,不仅承担电动机、底座和所架货车的质量,而且还要承受过作业程中所产生的各种力和力矩。
因此,其强度不仅关系到架车的力度,而且还关系到整车的安全性。
关键词:机架 DT015 稳定性ABSTRACTSince nearly half a century, all the countries in the world to study the railway technical equipment and modern management, efforts to promote the technology of railway transport development, a breakthrough in many aspects. Mobile electric cars machine is a kind of equipment is not required or crane, artificial can promote, portable and mobile electric car automatic control of synchronous lifting function machine.Security problem of mobile car machine one of the three major overhaul equipment as electric locomotive depot for the railway has more and more aroused the attention of designers.Design and manufacture of mobile lifting machine, in addition to considering the mechanism can be simple, safe, convenient up electricity or diesel locomotive bogie, launch, should also pay attention to the strength and stability problems of its own. Analysis on the optimization design of the frame part stress according to the actual plant visits and mechanics, the design is focused on the stability of mobile car machine, improve the service life and reliability, the lowest of the repair costs, economy of long period of use the mobile frame machine frame is high, bearer mobile lifting machine, not only bear the motor, the base and the rack truck quality, but also bear a variety of forces and moments generated operation process. Therefore, its strength is not only related to the car's efforts, but also related to the safety of the vehicle.Keyword:Keyword: Frame DT015 Stability目录第一章概述 (1)第二章总体设计与升降部分设计 (6)2.1移动式架车机总体设计说明 (6)2.2 升降部分设计 (11)第三章移动式架车机机架计算 (13)3.1 车机机架的受力分析 (13)3.2 机架的截面选择 (16)3.3 机架强度和刚度验算 (18)3.4 机架稳定性验算 (19)3.5 梁高的确定 (22)3.6 腹板的厚度 (22)3.7 翼缘板的厚度 (23)3.8 整体强度和刚度验算 (24)3.9总体稳定性验算 (25)3.10组合梁的局部稳定性 (26)3.11梁的拼接 (26)第四章总结 (28)参考文献 (29)图1-1 驾车机车间实例在图1-1中可以看出移动式驾车机在列车维修车间内4台为一组,可以方便的进行列车的维护和维修工图1-2 驾车机列车轨道上的使用移动式驾车机的设备基本功能要求:每组驾车机应配有走行机构,可在车间内地面上图3-2 驾车机传动部分简图)具有坚固的耐重结构,可以使驾车机具有更大型基座垫板支承液压缸。
巨大全方位车轮便于运输安放。
设计题目:移动式架车机DT015 总体及机架设计设计人:参考文献【1】王文斌.机械设计手册新版2.北京.机械工业出版社,2004.5【2】徐格宁.机械装备金属结构设计.北京.机械工业出版社,2009.7【3】吴庆鸣. 机械功臣设计. 武汉:武汉大学出版社,2006.4【4】杨国平. 现在工程机械技术. 北京:机械工业出版社,2006.3【5】孙训方. 材料力学(I)第5版. 北京:高等教育出版社,2005.7【6】严绍华.工程材料及机械制造基础(II).北京:高等教育出版社,2006.8【7】肖银铃.机械制图第六版.北京:高等教育出版社,2007.7【8】甘永立.几何量公差与检测.上海:上海科技出版社,1997【9】徐茂公.公差配合与测量技术.北京:机械工业出版社,2008【10】王文斌.机械设计手册新版6.北京:机械工业出版社,2004.8【11】田锡唐.焊接结构.北京:机械工业出版社,1990【12】牟至忠.机械零件可靠性设计.北京:机械工业出版社,1988【13】贾安东.焊接结构及生产设计.天津:天津大学出版社,1989【14】曲敬信.表面工程手册.北京:化学工业出版社,1998【15】吴宗泽.机械设计手册.(上下册).北京:机械工业出版社,2002【16】王超然.新编国际常用金属材料手册.北京:北京工业大学出版社,1995 【17】曾正明.机械工程材料手册第6版.北京:机械工业出版社,2001【18】萨本吉.高速齿轮传动.北京:机械工业出版社,1986【19】罗胜国.机械设计课程设计手册第2版.北京:高等教育出版社,1999 【20】闻邦椿.机械设计手册.第5版.北京:机械工业出版社,2010【21】成大先.机械设计手册.北京:化学工业出版社,2004【22】东北工学院编.机械零件设计手册.北京:冶金工业出版社,2004设计题目:移动式架车机DT015 总体及机架设计设计人:毕业实习报告(小四、黑体、居中)××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××设计题目:移动式架车机DT015 总体及机架设计设计人:××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××(五号、宋体)附录或后记(小四、黑体、居中)××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××设计题目:移动式架车机DT015 总体及机架设计设计人:××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××(五号、宋体)。